一种基于仿真测试平台的实物自动化测试环境
T-Box功能自动化测试

案例分享| T-Box功能自动化测试方案背景T-Box是实现汽车车联网的一个关键环节,从起初单纯的实现车辆信息采集,已发展到具有车辆信息监测及信息交互(V2X)、车辆远程控制、安全监测和报警、远程诊断、边缘计算等多种离线和在线的应用功能的载体。
为保障T-Box功能的正常运转,对其进行功能测试就尤为重要。
T-Box作为“边缘节点”,与车内控制器通过传统总线或车载以太网进行信息交互,与车外TSP(Telematics Service Platform)通过蜂窝基站无线技术进行信息交互。
从测试实现的角度,针对T-Box功能测试而言,由于自动化测试所需的“Input仿真”与“Output监测”的闭环存在一定难度,故基本通过手动或半自动化的传统方式进行测试,依靠“人在环”方式记录测试数据以及判断测试结果。
但该方式测试效率低且覆盖度受限,难以满足研发的快速迭代和深度验证的要求。
本文将介绍一种实现T-Box部分功能(与移动终端交互的功能)的自动化测试技术路径以及相关测试经验与大家分享。
测试对象和原理分析T-Box与手机移动端的主要交互功能如下:图1 T-Box与手机端主要交互功能内容车内T-Box与手机端的交互流程如下:图2 车内T-Box与手机端交互流程以车主希望能够通过手机中的APP查询到车辆当前的状态信息为例:●车辆通过卫星获取位置信息●车内T-Box通过传统总线或车载以太网获取车辆当前状态信息●车内T-Box通过蜂窝基站将信息传递给TSP服务器●TSP服务器通过蜂窝基站将数据传递到车主手机APP中从T-Box与手机端交互流程来分析,要实现T-Box功能自动化测试,需要以T-Box为中心搭建由T-Box车内交互平台(车内网络)与T-Box车外交互平台(TSP)而组成的闭环系统。
其中T-Box与车内交互可通过总线仿真与监测来实现,而T-Box与TSP交互的无线信号仿真较困难。
但是测试T-Box功能的最终目的是验证APP的触发、显示与T-Box功能逻辑是否满足要求。
canoe的使用

canoe的使用一、什么是canoe?Canoe是一款由NXP公司推出的基于Eclipse开发平台的支持多种微控制器的集成开发环境(IDE),主要用于开发和调试嵌入式系统。
它提供了丰富的功能和工具,可以简化嵌入式开发过程,并提高开发效率。
二、Canoe的特点Canoe具有以下特点: 1. 跨平台支持:Canoe可在多种操作系统上运行,包括Windows、Linux和macOS,使得开发者可以根据自己的喜好和需求选择合适的操作系统。
2. 多种微控制器支持:Canoe支持NXP公司的多种微控制器系列,如Kinetis、LPC和i.MX系列,可以满足不同项目的需求。
3. 集成开发环境:Canoe提供了完整的开发工具链,包括编译器、调试器、仿真器等,方便开发者在一个环境中完成整个开发过程。
4. 丰富的插件和扩展:Canoe支持各种插件和扩展,可以为开发者提供更多的功能和工具,满足特定项目的需求。
三、Canoe的安装以下是安装Canoe的步骤: 1. 下载Canoe安装包。
2. 打开安装包并运行安装程序。
3. 按照安装向导的指示进行安装。
4. 安装完成后,启动Canoe。
四、Canoe的基本功能Canoe提供了许多基本功能,如代码编辑、编译、调试等。
以下是主要功能的介绍:1. 代码编辑Canoe提供了强大的代码编辑功能,包括语法高亮、自动补全、代码折叠等。
开发者可以在编辑器中方便地编写代码,并且可以根据自己的习惯进行个性化配置。
2. 编译和构建Canoe集成了编译器和构建工具,可以将开发者编写的代码编译成可执行文件或固件。
开发者可以通过设置编译选项和构建规则来定制编译和构建过程。
3. 调试Canoe提供了强大的调试功能,包括断点调试、变量监视、寄存器查看等。
开发者可以在调试过程中实时监控程序的执行状态,并进行相应的调试操作。
4. 仿真和测试Canoe支持仿真和测试功能,开发者可以在模拟环境中运行和测试他们的代码。
电磁兼容评估方法综述
电磁兼容评估方法综述摘要:随着信息化设备、系统的发展与应用,各平台与系统的电磁环境更加复杂,面临了严峻电磁兼容性问题。
为了在电磁兼容设计阶段提前预测系统或平台的电磁兼容性,需要开展电磁兼容性评估。
本文在探讨电磁兼容性评估的重要价值与主要的评估方法的基础上,对电网、铁路、机场、飞机、汽车、船舶等不同平台的电磁兼容特点与对应的评估方法进行了介绍,并对各平台电磁兼容性评估面临的困难进行了梳理,并指出了电磁兼容性评估中值得进一步研究与探索的前沿方向。
关键词:电磁兼容性;电磁兼容性评估;数学模型;计算机仿真1概述随着电气与电子技术的高速发展与广泛应用,各类信息化、智能化电子设备给现代社会带来了便利,各工业设备、系统使用的电磁信号具有功率大、频谱宽、密度高的特点,构成了极其复杂的电磁环境。
各信息化、智能化电子设备在复杂的电磁环境中面临了愈发严峻的电磁干扰(Electromagnetic Interfere,EMI),电磁兼容性(Electromagnetic Compatibility,EMC)问题也成了现代社会日益关注的焦点。
电磁兼容性是指一个装置、设备或系统可以在其环境中正常工作,并且不对其所在环境中的任何其它事物产生难以容忍的电磁干扰[1]。
它是与电磁环境密切相关的一门应用学科,它以电子、电气、电磁场、工艺材料等学科的基本理论和技术为基础,关注并解决一切自然和人为的电磁干扰所产生的理论和技术课题,因此其是一门综合性很强的边缘学科,同时又是一门实践性很强的应用学科[2];其研究的最终目的就是在有限的空间和频谱范围内,使可能发出电磁干扰的各种电子、电气设备或子系统在合理的条件下使其互不干扰,保证系统或子系统的兼容性,即实现共存[3]。
为了在电磁兼容设计阶段提前预测系统或平台的电磁兼容性,需要开展电磁兼容性评估。
目前,电磁兼容性评估被广泛应用于汽车、飞机、船舶等移动平台的设计、制造与改造过程中提前释放电磁兼容风险,并在铁路、机场、电网等工程中扮演更加重要的角色。
基于NI Veristand的自动化脚本测试
• 96•硬件在环是一种实时仿真测试技术,它把实际的被控对象或其他的系统部件用高速计算机上实时运行的仿真模型来代替;在航空发动机控制系统的研制阶段,通过发动机模型代替真实的发动机部件来搭建HIL 仿真环境。
实现对控制器在各种运行工况下的控制仿真,充分验证各项控制功能和性能,预先检验设计的正确性和可靠性,对关键零部件进行初步的参数匹配,缩短研制周期,提高研制质量,降低研制风险。
本文提出了一种基于NI Veristand 和PXI 开放式架构的HIL 仿真平台,将NI Veristand 工具引入航空发动机控制系统硬件在环仿真平台,同时增加了对脚本的支持,使平台不仅具备一定的实时性、开放性、可扩展等特点,同时实现测试脚本自动化。
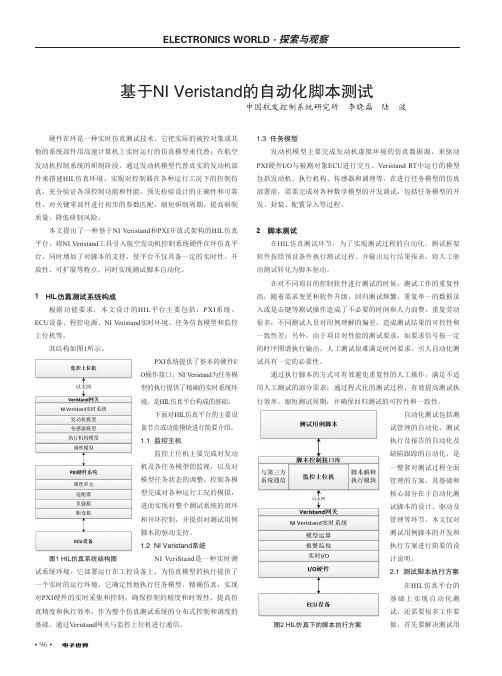
1 HIL仿真测试系统构成根据功能要求,本文设计的HIL 平台主要包括:PXI 系统、ECU 设备、程控电源、NI Veristand 实时环境、任务仿真模型和监控上位机等。
其结构如图1所示。
1.3 任务模型发动机模型主要完成发动机虚拟环境的仿真数据源,来驱动PXI 硬件I/O 与被测对象ECU 进行交互。
Veristand RT 中运行的模型包括发动机、执行机构、传感器和调理等,在进行任务模型的仿真部署前,需要完成对各种数学模型的开发调试,包括任务模型的开发、封装、配置导入等过程。
2 脚本测试在HIL 仿真测试环节,为了实现测试过程的自动化,测试框架软件按照预设条件执行测试过程,并输出运行结果报表,将人工驱动测试转化为脚本驱动。
在对不同项目的控制软件进行测试的时候,测试工作的重复性高;随着需求变更和软件升级,回归测试频繁,重复单一的数据录入或是击键等测试操作造成了不必要的时间和人力浪费,重复劳动很多;不同测试人员对用例理解的偏差,造成测试结果的可控性和一致性差;另外,由于项目对性能的测试要求,如要求信号按一定的时序图谱执行输出,人工测试很难满足时间要求。
引人自动化测试具有一定的必要性。
使用TestStand进行自动化测试提高测试效率的利器

使用TestStand进行自动化测试提高测试效率的利器在软件开发过程中,测试是一个至关重要的环节。
传统的手动测试方法无疑存在很多不足之处,比如测试效率低、容易出错、重复劳动等。
为了解决这些问题,自动化测试成为了当下热门的趋势。
TestStand作为一种自动化测试工具,被广泛应用于各个行业。
本文将介绍TestStand的功能和优势,以及如何使用它提高测试效率。
一、TestStand简介TestStand是国际上广泛应用的一种自动化测试环境。
它可以帮助测试工程师创建、执行和组织测试系统,提供了一个灵活可扩展的测试平台。
TestStand具有良好的可定制性和扩展性,并且支持多种编程语言,如LabVIEW、C/C++和Python等。
它的主要特点包括:1. 测试序列管理:TestStand提供了一个直观而强大的界面,可以方便地创建和管理测试序列。
测试序列是测试过程中的一系列步骤,包括初始化、执行测试用例、数据记录和结果分析等。
2. 多语言支持:TestStand支持多种编程语言,使得开发人员可以根据自己的喜好和项目需求选择合适的语言。
这样可以充分发挥各个语言的优势,提高开发效率。
3. 数据管理:TestStand提供了强大的数据管理功能,可以方便地记录和存储测试过程中的各种数据,包括测试参数、测试结果和日志等。
这对于问题分析和追溯非常有帮助。
4. 与其他工具的集成:TestStand可以与其他软件测试工具、数据库、版本控制工具等进行集成,实现数据共享与交流,提高工作效率。
二、使用TestStand的好处通过使用TestStand进行自动化测试,可以带来许多好处,主要包括以下几点:1. 提高测试效率:相比传统的手动测试,自动化测试可以大大提高测试效率。
通过编写测试序列,可以快速执行大量的测试用例,并自动记录测试结果。
这样可以有效减少测试时间和人力投入。
2. 提高测试覆盖率:自动化测试能够更全面地覆盖系统的各个功能和场景。
测控专业虚拟仿真实验平台设计

测控专业虚拟仿真实验平台设计一、引言随着科技的不断发展,计算机技术的应用越来越广泛,虚拟仿真技术成为了模拟真实环境的重要手段。
在测控专业中,虚拟仿真实验平台的设计与开发,可以有效提高学生对测控专业知识的理解和运用能力。
本文将介绍一种测控专业虚拟仿真实验平台的设计思路和主要功能。
二、设计思路虚拟仿真实验平台的设计思路主要包括以下几个方面:1.环境模拟:通过虚拟现实技术,搭建一个与真实环境相似的虚拟场景,包括实验室、设备、工具等,使学生可以在虚拟环境中进行实验操作。
2.系统模拟:根据测控专业中常见的测量与控制系统,设计相应的数学模型和算法,在平台中实现对系统的模拟和控制。
3.真实数据采集:通过传感器对真实环境中的数据进行采集,并实时传输到虚拟环境中,使学生能够在虚拟环境中对真实数据进行处理和分析。
4.实验操作:提供虚拟的仪器设备和工具,使学生可以在虚拟环境中进行测量、控制、调试等操作,完成特定实验任务。
5.反馈与评估:通过虚拟仿真实验平台对学生的操作进行实时监测和记录,及时给出操作反馈和实验结果评估,帮助学生提高实验操作能力。
三、主要功能1.虚拟实验室:提供一个虚拟实验室场景,包括实验台、仪器设备、工具等,学生可以在虚拟环境中进行实验操作,并模拟实验过程中的各种情况。
2.设备模拟:设计虚拟仪器设备,如示波器、信号发生器等,完整模拟真实设备的功能和操作方式,使学生能够熟悉仪器设备的使用和操作流程。
3.系统模拟:根据不同的测控系统,设计相应的数学模型和算法,实现对系统的模拟和控制,学生可以在虚拟环境中进行系统调试和优化。
4.数据采集与处理:通过传感器采集真实环境中的数据,并实时传输到虚拟环境中,学生可以在虚拟环境中对数据进行处理、分析和展示。
5.实验任务:根据课程要求和实践需求,设计一系列的实验任务,使学生能够在虚拟环境中完成特定的测控实验,掌握测控专业知识和操作技能。
6.操作反馈与评估:对学生的实验操作进行监测和记录,并及时给出操作反馈和实验结果评估,帮助学生及时调整实验操作和改进实验方法。
Multisim简介与使用
目录1 Multisim 12简介及使用 (1)1.1 Multisim简介 (1)1.1.1 Multisim概述 (1)1.1.2 Multisim发展历程 (2)1.1.3 Multisim 12的特点 (3)1.2 Multisim 12的基本界面 (4)1.2.1 Multisim 12的主窗口界面 (4)1.2.2 Multisim 12的标题栏 (5)1.2.3 Multisim 12的菜单栏 (5)1.2.4 Multisim 12的工具栏 (6)1.2.5 Multisim 12的元件库 (7)1.2.6 Multisim 12的虚拟仪器库 (8)1.3 Multisim 12的使用方法与实例 (9)1Multisim 12简介及使用1.1Multisim简介1.1.1Multisim概述NI Multisim是一款著名的电子设计自动化软件,与NI Ultiboard同属美国国家仪器公司的电路设计软件套件。
是入选伯克利加大SPICE项目中为数不多的几款软件之一。
Multisim在学术界以及产业界被广泛地应用于电路教学、电路图设计以及SPICE模拟。
Multisim是以Windows为基础的仿真工具,适用于板级的模拟/数字电路板的设计工作。
它包含了电路原理图的图形输入、电路硬件描述语言输入方式,具有丰富的仿真分析能力。
我们可以使用Multisim交互式地搭建电路原理图,并对电路进行仿真。
Multisim提炼了SPICE仿真的复杂容,这样我们无需懂得深入的SPICE技术就可以很快地进行捕获、仿真和分析新的设计,这也使其更适合电子学教育。
通过Multisim和虚拟仪器技术,PCB设计工程师和电子学教育工作者可以完成从理论到原理图捕获与仿真再到原型设计和测试这样一个完整的综合设计流程。
1.1.2Multisim发展历程Multisim 电路仿真软件最早是加拿大图像交互技术公司(Interactive Image Technologies,IIT)于20世纪80年代末推出的一款专门用于电子线路仿真的虚拟电子工作平台(Electronics Workbench,EWB)。
Multisim简介及使用

目录1 Multisim 12简介及使用 (2)1.1 Multisim简介 (2)1.1.1 Multisim概述 (2)1.1.2 Multisim发展历程 (2)1.1.3 Multisim 12的特点 (4)1.2 Multisim 12的基本界面 (6)1.2.1 Multisim 12的主窗口界面 (6)1.2.2 Multisim 12的标题栏 (7)1.2.3 Multisim 12的菜单栏 (7)1.2.4 Multisim 12的工具栏 (9)1.2.5 Multisim 12的元件库 (10)1.2.6 Multisim 12的虚拟仪器库 (12)1.3 Multisim 12的使用方法与实例 (13)页脚内容11Multisim 12简介及使用1.1Multisim简介1.1.1Multisim概述NI Multisim是一款著名的电子设计自动化软件,与NI Ultiboard同属美国国家仪器公司的电路设计软件套件。
是入选伯克利加大SPICE项目中为数不多的几款软件之一。
Multisim在学术界以及产业界被广泛地应用于电路教学、电路图设计以及SPICE模拟。
Multisim是以Windows为基础的仿真工具,适用于板级的模拟/数字电路板的设计工作。
它包含了电路原理图的图形输入、电路硬件描述语言输入方式,具有丰富的仿真分析能力。
我们可以使用Multisim交互式地搭建电路原理图,并对电路进行仿真。
Multisim提炼了SPICE仿真的复杂内容,这样我们无需懂得深入的SPICE技术就可以很快地进行捕获、仿真和分析新的设计,这也使其更适合电子学教育。
通过Multisim和虚拟仪器技术,PCB设计工程师和电子学教育工作者可以完成从理论到原理图捕获与仿真再到原型设计和测试这样一个完整的综合设计流程。
1.1.2Multisim发展历程Multisim 电路仿真软件最早是加拿大图像交互技术公司(Interactive Image Technologies,IIT)于20世纪80年代末推出的一款专门用于电子线路仿真的虚拟电子工作平台(Electronics Workbench,EWB)。
dSPACE实时仿真平台软件环境及应用

(1Students’ Brigade of NAEI, Yantai 264001, China 2Department of Automatic Control Engineering of NAEI, Yantai 264001, China)
结果证明此次仿真实验是比较成功的
关键词 HILS RTI RTW ControlDesk dSPACE 仿真平台
文章编号 1004-731X (2004) 04-0667-04
中图分类号 TP391.9
文献标识码 A
Software Environment and Application of dSPACE Real-Time Simulation Platform
行动力学与控制, 系统仿真技术; 吴 进 华 (1963-), 男, 浙江金华人, 教
授, 研究方向飞行器飞行动力学与控制, 系统仿真技术, 模式识别与智
能控制等
dSPACE 简介
dSPACE实时仿真系统是由德国 dSPACE 公司开发的一 套基于 MATLAB/Simulink 的控制系统在实时环境下的开发 及测试工作平台 实现了和 MATLAB/Simulink 的无缝连接 dSPACE 实时系统由两大部分组成 一是硬件系统 二是软 件环境 其中硬件系统的主要特点是具有高速计算能力 包 括处理器和 I/O 接口等 软件环境可以方便地实现代码生成 /下载和试验调试等工作 dSPACE 具有强大的功能 可以很 好地完成控制算法的设计 测试和实现 并为这一套并行工 程提供了一个良好的环境
dSPACE 实时仿真系统具有许多其它仿真系统具有的 无法比拟的优点
基于MATLAB_GUI的自动控制原理仿真实验平台设计
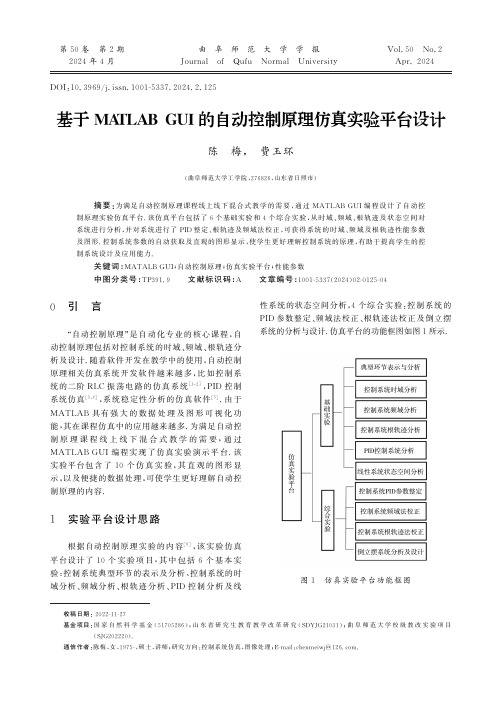
D O I :10.3969/j.i s s n .1001-5337.2024.2.125 收稿日期:2022-11-27基金项目:国家自然科学基金(51705286);山东省研究生教育教学改革研究(S D Y J G 21031);曲阜师范大学校级教改实验项目(S J G 202220).通信作者:陈梅,女,1975-,硕士,讲师;研究方向:控制系统仿真,图像处理;E -m a i l :c h e n m e i w j@126.c o m.基于M A T L A B G U I 的自动控制原理仿真实验平台设计陈 梅, 费玉环(曲阜师范大学工学院,276826,山东省日照市) 摘要:为满足自动控制原理课程线上线下混合式教学的需要,通过MA T L A B G U I 编程设计了自动控制原理实验仿真平台.该仿真平台包括了6个基础实验和4个综合实验,从时域㊁频域㊁根轨迹及状态空间对系统进行分析,并对系统进行了P I D 整定㊁根轨迹及频域法校正,可获得系统的时域㊁频域及根轨迹性能参数及图形.控制系统参数的自动获取及直观的图形显示,使学生更好理解控制系统的原理,有助于提高学生的控制系统设计及应用能力.关键词:MA T A L B G U I;自动控制原理;仿真实验平台;性能参数中图分类号:T P 391.9 文献标识码:A 文章编号:1001-5337(2024)02-0125-040 引 言自动控制原理 是自动化专业的核心课程,自动控制原理包括对控制系统的时域㊁频域㊁根轨迹分析及设计.随着软件开发在教学中的使用,自动控制原理相关仿真系统开发软件越来越多,比如控制系统的二阶R L C 振荡电路的仿真系统[1,2],P I D 控制系统仿真[3,4],系统稳定性分析的仿真软件[5].由于MA T L A B 具有强大的数据处理及图形可视化功能,其在课程仿真中的应用越来越多.为满足自动控制原理课程线上线下混合式教学的需要,通过MA T L A B G U I 编程实现了仿真实验演示平台.该实验平台包含了10个仿真实验,其直观的图形显示,以及便捷的数据处理,可使学生更好理解自动控制原理的内容.1 实验平台设计思路根据自动控制原理实验的内容[6],该实验仿真平台设计了10个实验项目,其中包括6个基本实验:控制系统典型环节的表示及分析㊁控制系统的时域分析㊁频域分析㊁根轨迹分析㊁P I D 控制分析及线性系统的状态空间分析,4个综合实验:控制系统的P I D 参数整定㊁频域法校正㊁根轨迹法校正及倒立摆系统的分析与设计.仿真平台的功能框图如图1所示.图1 仿真实验平台功能框图第50卷 第2期2024年4月 曲阜师范大学学报J o u r n a l o f Q u f u N o r m a l U n i v e r s i t yV o l .50 N o .2A p r .2024(1)控制系统典型环节表示与分析.典型环节主要包括比例环节㊁积分环节㊁一阶惯性环节㊁实际微分环节㊁二阶振荡环节及延迟环节6种.该实验实现了典型控制系统的数学模型表示,并绘制了各系统的单位阶跃响应曲线,同时对系统性能进行了分析.(2)控制系统的时域分析.该实验让学生了解不同输入信号下的系统响应曲线,并掌握单位阶跃响应的动态性能指标.输入信号包括单位阶跃㊁单位脉冲㊁单位斜坡㊁单位加速度㊁及正弦信号,动态性能指标包括上升时间t r㊁峰值时间t p㊁超调量σ㊁调节时间t s及稳态误差e s s.(3)控制系统的频域分析.该实验主要包括系统频域图形绘制及频域参数求解.频域图形包括B o d e 图㊁N y q u i s t图及N i c h o l s曲线,系统频域参数包括增益裕量G m㊁相角裕量P m㊁穿越频率ωc g及剪切频率ωc p.(4)控制系统的根轨迹分析.该实验包括系统根轨迹绘制,以及求解系统的临界开环增益K及稳定增益范围.(5)P I D控制系统分析.该实验可以设置不同P I D参数,通过单位阶跃响应曲线及动态性能指标,使学生掌握P㊁P I㊁P I D等不同控制及参数,对系统性能的影响.(6)线性系统的状态空间分析.该实验可以对线性系统可观可控分析;确定系统极点配置的状态反馈矩阵及反馈系统;确定状态观测器反馈矩阵及状态观测器设计.(7)控制系统的P I D参数整定.该实验让学生掌握临界比例度法及4ʒ1衰减曲线法2种常用的P I D参数整定方法,以及P㊁P I及P I D控制参数的求解.(8)控制系统的频域法校正.频域法校正包括超前㊁滞后㊁滞后超前3种校正方法.通过设置需要校正的参数静态误差系数K v㊁相角裕度γ及剪切频率ωc,来确定校正器的参数,并通过校正前㊁后的时域及频域参数来验证校正后系统性能的改善.(9)控制系统的根轨迹法校正.根轨迹校正包括超前㊁滞后㊁超前滞后3种校正方式.通过设置时域参数超调量σ及调节时t s;或频域参数阻尼比ζ及角频率ωn,来确定校正系统的参数,并通过校正前后的时域参数对比来验证校正后系统性能是否满足要求.(10)倒立摆系统的分析与设计.该实验让学生了解倒立摆系统的工作原理,以及对倒立摆的控制.通过设置倒立摆参数,可以确定状态方程及输出方程,并通过极点配置及P I D参数整定对系统进行控制.该仿真实验平台的界面的设计及功能编程是通过MA T L A B G U I设计实现的.界面的设计通过G U I D E图形用户接口开发环境实现[7].在MA T-L A B2018的命令窗口中键入 g u i d e 打开G U I D E,通过添加控件分别设计各界面,界面设计的文件名扩展名为.f i g;然后编辑对应的M文件,通过各界面控件的C a l l b a c k函数实现控件的功能.2实验平台的功能实现2.1仿真系统界面设计该仿真系统包括1个主界面和10个子界面,主界面中主要包括10个按钮,用来显示各实验子界面.下面以 控制系统根轨迹校正 实验为例说明各子界面的设计过程.根轨迹校正实验子界面中主要包括系统参数设置㊁校正参数设置㊁校正系统获取㊁系统性能参数的求解㊁校正前后根轨迹及单位阶跃响应曲线的绘制5个模块.仿真界面通过MA T L A B G U I设计,通过添加各控件实现,界面设计如图2所示.图2根轨迹法校正界面2.2实验平台功能实现2.2.1系统参数设置控制系统参数设置形式为传递函数形式,通过在编辑框中输入分子n u m㊁分母d e n参数实现.使用g e t函数获取编辑框中的字符串,并通过s t r2n u m函数将字符串转换为数值,最后通过t f函数得到系统传递函数.621曲阜师范大学学报(自然科学版)2024年2.2.2校正参数设置根据根轨迹法校正设计要求[8],系统校正的参数设置包括静态误差系数K v㊁时域参数超调量σ和调节时间t s㊁频域参数阻尼比ζ和角频率ωn.设置时域参数或频率参数的选择通过单选按钮实现,两种形式的参数可以相互转换,主要实现代码如下.i f(g e t(h a n d l e s.r a d i o t i m e,'V a l u e'))%时域参数z e t e=((l o g(1/s i g m a))^2/((p i)^2+(l o g(1/ s i g m a))^2))^(1/2)%ζw n=3.5/(z e t e*t s)%ωne l s e%频域参数s i g m a=e x p(-p i*z e t e/s q r t(1-z e t e*z e t e)) *100t s=3.5/(z e t e*w n)2.2.3校正器参数根轨迹法校正包括超前㊁滞后㊁超前滞后3种校正方式,通过按钮实现选择,超前校正实现代码如下. k c=k v/n u m*d e n(l e n-1);g=p o l y v a l(n u m,s1)/p o l y v a l(d e n,s1);t h e t a_G=a n g l e(g);t h e t a_s=a n g l e(s1);MG=a b s(g);M s=a b s(s1);T z=(s i n(t h e t a_s)-k c*MG*s i n(t h e t a_G-t h e t a_s))/(k c*MG*M s*s i n(t h e t a_G))T p=-(k c*MG*s i n(t h e t a_s)+s i n(t h e t a_G +t h e t a_s))/(M s*s i n(t h e t a_G))G c1=t f([T z,1],[T p,1])%超前2.2.4校正系统动态性能参数校正后的系统开环传递函数是由原系统的开环传递函数G0(s)与校正器的传递函数G c(s)串联组成[9].为了验证校正系统是否满足要求,需要确定校正前后系统的性能参数,包括超调量σ㊁上升时间t r㊁调节时间t s,主要实现代码如下.[y,t]=s t e p(G G c);[m a x_y,k]=m a x(y);C=d c g a i n(G G c);m a x_o v e r s h o o t=(m a x_y-C)/C*100;s=l e n g t h(t);w h i l e y(s)>0.95*C&&y(s)<1.05*Ce n ds=s-1;t s=t(s)%调节时间2.2.5仿真曲线绘制为了更直观地比较系统校正前后的性能,绘制了其对应的单位阶跃响应曲线及根轨迹.使用s t e p 函数绘制单位阶跃响应曲线,使用r l o c u s函数绘制根轨迹曲线,坐标轴控件的设置通过a x e s函数实现. 3实验平台测试通过实例对实验平台的各项功能进行了测试.例控制系统的开环传递函数G(s)=8s2+0.4s,通过根轨迹校正,使系统满足静态误差系数为4,超调量为30%,调节时间为3.5s.根据校正要求,首先进行系统参数设置,输入分子n u m为8,分母d e n为[1,0.4,0].设置校正参数静态误差系数K v为4,选择时域参数单选按钮,并输入超调量σ为30,调节时间t s为3.5s.选择校正按钮后,系统开始校正,将求解的校正器参数及系统性能参数显示到对应的编辑框中.选择 超前校正 按钮,求得校正系统的传递函数为G C(s)=2.73s+10.51s+1,校正后的超调量为30%,上升时间为0.5s,调节时间为2.76s,满足设计要求.选择 滞后校正 按钮,求得校正系统的传递函数为G C(s)=0.215s+0.00215s+0.00215,校正后的超调量为60%,上升时间为0.94s,调节时间为13.4s,超调量及调节设计均不满足设计要求,不采用该校正方式.选择 超前滞后 校正按钮,求得校正系统的传递函数为G C(s)=0.49s+0.20.5s+1㊃0.66s+0.0066s+0.00656,校正后的超调量为21.8%,上升时间为0.69s,调节时间为2.3s,满足设计要求.超前滞后校正前后单位阶跃响应响应曲线如图3所示,根轨迹下页如图4所示.图3超前滞后校正前后单位阶跃响应曲线721第2期陈梅,等:基于MA T L A B G U I的自动控制原理仿真实验平台设计图4 超前滞后校正前后根轨迹4 结 论通过MA T L A B G U I 设计了自动控制原理实验仿真平台,实现了控制系统分析中的10个典型实验.该仿真系统数据获取方便,并且直观的图形显示有助于学生加深对控制系统的理解.教学实践表明,该实验平台操作方便,功能设计齐全,可用于自动控制原理课程的线下课堂演示教学和线上实验教学,使学生更牢固地掌握知识,同时有助于提高学生的编程设计能力和问题解决能力.参考文献:[1]马壮.基于M a t l a b 的典型二阶R L C 振荡电路实验教学仿真[J ].实验室研究与探索,2016,35(10):95-98.[2]王晨丰,赵鹏.基于M A T L A B L T I V i e w e r 工具箱的二阶系统阶跃响应分析[J ].电子测试,2020(8):57-59.[3]陈梅,王健.基于MA T L A B G U I 的P I D 控制仿真系统设计[J ].实验技术与管理,2020,28(2):140-143.[4]张婧,盖文东,徐文尚,等.基于M a t l a b 的P I D 控制器参数整定方法[J ].实验科学与技术,2016,14(4):37-40.[5]闫红梅,张鸣,李远征,等.基于M a t l a b 的系统稳定性分析实验设计[J ].实验技术与管理,2018,35(4):144-146.[6]胡寿松.自动控制原理[M ].6版.北京:科学出版社,2016.[7]张贤明.MA T L A B 语言及应用案例[M ].南京:东南大学出版社,2010.[8]王正林,王胜开,陈国顺,等.MA T L A B /S i m u l i n k 与控制系统仿真[M ].北京:电子工业出版社,2008.[9]张德丰.MA T L A B 控制系统设计与仿真[M ].北京:电子工业出版社,2009.D e s i g n o f a u t o m a t i c c o n t r o l p r i n c i p l e s i m u l a t i o n e x pe r i m e n t p l a tf o r m b a s e d o n M A T L A B G U IC H E N M e i , F E I Y u h u a n(C o l l e g e o f E n g i n e e r i n g ,Q u f u N o r m a l U n v e r s i t y ,276826,R i z h a o ,S h a n d o n g,P R C )A b s t r a c t :T o m e e t t h e n e e d s o f b l e n d e d o n l i n e a n d o f f l i n e t e a c h i n g o f a u t o m a t i c c o n t r o l p r i n c i pl e s ,t h e s i m u l a t i o n e x p e r i m e n t p l a t f o r m o f a u t o m a t i c c o n t r o l p r i n c i p l e i s d e s i g n e d t h r o u gh MA T L A B G U I p r o -g r a mm i n g .T h e s i m u l a t i o n p l a t f o r m i n c l u d e s 6b a s i c e x p e r i m e n t s a n d 4c o m p r e h e n s i v e e x p e r i m e n t s .I t a n -a l y z e s t h e s y s t e m f r o m t i m e d o m a i n ,f r e q u e n c y d o m a i n ,r o o t l o c u s a n d s t a t e s pa c e ,a n d c o n d u c t s P I D t u n -i n g ,r o o t l o c u s a n d f r e q u e n c y d o m a i n c o r r e c t i o n f o r t h e s y s t e m.T h e t i m e d o m a i n ,f r e q u e n c y do m a i n a n d r o o t l o c u s p e r f o r m a n c e p a r a m e t e r s a n d g r a p h s o f t h e s y s t e m c a n b e o b t a i n e d .T h e a u t o m a t i c a c q u i s i t i o n o f c o n t r o l s y s t e m p a r a m e t e r s a n d v i s u a l g r a p h i c d i s p l a y c o u l d h e l p s t u d e n t s t o b e t t e r u n d e r s t a n d t h e p r i n c i pl e o f t h e c o n t r o l s y s t e m ,e n h a n c e s t u d e n t s c o n t r o l s y s t e m d e s i g n a n d a p p l i c a t i o n a b i l i t y,a n d m e e t t h e r e -q u i r e m e n t s o f e x p e r i m e n t a l t e a c h i n g o b je c t i v e s .K e y wo r d s :MA T L A B G U I ;a u t o m a t i c c o n t r o l p r i n c i p l e ;s i m u l a t i o n e x p e r i m e n t p l a t f o r m ;p e r f o r m -a n c e p a r a m e t e r821 曲阜师范大学学报(自然科学版) 2024年。
基于仿真测试平台的自动化部署装置及部署方法[发明专利]
![基于仿真测试平台的自动化部署装置及部署方法[发明专利]](https://img.taocdn.com/s3/m/67c76a1e7c1cfad6185fa71d.png)
专利名称:基于仿真测试平台的自动化部署装置及部署方法专利类型:发明专利
发明人:王伟,杜恒
申请号:CN201710723707.9
申请日:20170822
公开号:CN107562488A
公开日:
20180109
专利内容由知识产权出版社提供
摘要:本发明公开一种基于仿真测试平台的自动化部署装置及部署方法,能实现仿真环境的快速部署,提高VOBC、ZC设备的刷机效率。
所述装置包括:SVN服务器、仿真测试平台、仿真平台维护机、自动刷机设备以及持续集成、部署及发布平台;仿真测试平台包括至少一台仿真工作站,仿真测试平台单独组网,形成仿真平台网;仿真平台维护机,用于为仿真平台网划分WLAN,并配置IP,以及通过所述自动刷机设备为被测设备刷机、上下电;持续集成、部署及发布平台,用于根据配置项中的IP,通过接入所述仿真平台网,将仿真测试平台软件从SVN服务器部署到至少一台仿真工作站;仿真平台维护机,还用于根据测试条件启动相应的仿真测试平台软件,以对所述被测设备进行测试。
申请人:交控科技股份有限公司
地址:100070 北京市丰台区科技园海鹰路6号院北京总部国际2、3号楼
国籍:CN
代理机构:北京路浩知识产权代理有限公司
更多信息请下载全文后查看。
一种品模试验环境通用分布式实时仿真平台[发明专利]
![一种品模试验环境通用分布式实时仿真平台[发明专利]](https://img.taocdn.com/s3/m/7d5bd3f5a216147916112849.png)
专利名称:一种品模试验环境通用分布式实时仿真平台专利类型:发明专利
发明人:张雷,芦艳宏,袁佺,房伊,李贺琦
申请号:CN202011529111.3
申请日:20201222
公开号:CN112631578A
公开日:
20210409
专利内容由知识产权出版社提供
摘要:本申请属于模拟仿真试验技术领域,特别涉及一种品模试验环境通用分布式实时仿真平台。
包括:仿真控制管理模块、时钟管理模块、数据接口模块以及插件接口模块。
本申请提供一种品模试验环境通用的、开放式、组件化实时仿真平台,使得品模试验环境体系结构标准化,实现仿真模型的通用性、复用性。
能够解决试验环境分布式仿真的快速组建、组合、修改、更新问题和组建新的品模试验环境软件直接复用问题,提高试验环境构建效率,便于试验环境的维护和数据模型复用。
申请人:中国航空工业集团公司沈阳飞机设计研究所
地址:110035 辽宁省沈阳市皇姑区塔湾街40号
国籍:CN
代理机构:北京航信高科知识产权代理事务所(普通合伙)
代理人:高原
更多信息请下载全文后查看。
TestStand与LabVIEW的完美结合打造高效测试平台
TestStand与LabVIEW的完美结合打造高效测试平台TestStand和LabVIEW是两个在工业自动化领域应用广泛的软件工具。
TestStand是一款用于自动化测试的开发环境,而LabVIEW则是用于数据采集和控制的图形化编程工具。
这两个工具的结合可以为测试平台的开发提供更高效更灵活的解决方案。
一、TestStand简介TestStand是National Instruments公司开发的自动化测试开发环境,它提供了一种灵活可扩展的框架,用于创建、执行和报告各种类型的测试。
TestStand的特点包括:1. 灵活的测试开发:TestStand提供了可视化的开发环境,用户可以通过界面拖拽的方式快速建立测试流程和步骤。
2. 多种测试类型支持:TestStand支持各类测试,包括单元测试、功能测试、性能测试等,能满足不同场景下的测试需求。
3. 数据管理和报告生成:TestStand可以对测试数据进行管理和存储,并生成详细的测试报告,便于分析和对比测试结果。
二、LabVIEW简介LabVIEW是National Instruments公司开发的一款图形化编程工具,通过拖拽和连接图形化元件构建程序,并通过高效的数据流和事件驱动机制实现实时控制和数据采集。
LabVIEW的特点包括:1. 直观的图形化编程:LabVIEW以图形化的方式展现程序结构,使得编程过程更直观更易于理解,降低了学习和开发的门槛。
2. 强大的数据处理能力:LabVIEW提供了丰富的数据处理和分析工具,包括滤波、傅里叶变换、统计分析等,方便对采集到的数据进行处理和分析。
3. 多种硬件设备支持:LabVIEW支持与各种硬件设备的连接,包括传感器、执行器、测量仪器等,可以实现各种实时控制和数据采集的应用。
三、TestStand与LabVIEW的结合1. 基于LabVIEW的测试步骤:TestStand可以直接调用LabVIEW 编写的VI作为测试步骤,从而利用LabVIEW强大的数据采集和控制能力。
Multisim简介及使用
目录1 Multisim 12简介及使用 (2)1.1 Multisim简介 (2)1.1.1 Multisim概述 (2)1.1.2 Multisim发展历程 (2)1.1.3 Multisim 12的特点 (4)1.2 Multisim 12的基本界面 (6)1.2.1 Multisim 12的主窗口界面 (6)1.2.2 Multisim 12的标题栏 (7)1.2.3 Multisim 12的菜单栏 (7)1.2.4 Multisim 12的工具栏 (9)1.2.5 Multisim 12的元件库 (10)1.2.6 Multisim 12的虚拟仪器库 (12)1.3 Multisim 12的使用方法与实例 (13)页脚内容11Multisim 12简介及使用1.1Multisim简介1.1.1Multisim概述NI Multisim是一款著名的电子设计自动化软件,与NI Ultiboard同属美国国家仪器公司的电路设计软件套件。
是入选伯克利加大SPICE项目中为数不多的几款软件之一。
Multisim在学术界以及产业界被广泛地应用于电路教学、电路图设计以及SPICE模拟。
Multisim是以Windows为基础的仿真工具,适用于板级的模拟/数字电路板的设计工作。
它包含了电路原理图的图形输入、电路硬件描述语言输入方式,具有丰富的仿真分析能力。
我们可以使用Multisim交互式地搭建电路原理图,并对电路进行仿真。
Multisim提炼了SPICE仿真的复杂内容,这样我们无需懂得深入的SPICE技术就可以很快地进行捕获、仿真和分析新的设计,这也使其更适合电子学教育。
通过Multisim和虚拟仪器技术,PCB设计工程师和电子学教育工作者可以完成从理论到原理图捕获与仿真再到原型设计和测试这样一个完整的综合设计流程。
1.1.2Multisim发展历程Multisim 电路仿真软件最早是加拿大图像交互技术公司(Interactive Image Technologies,IIT)于20世纪80年代末推出的一款专门用于电子线路仿真的虚拟电子工作平台(Electronics Workbench,EWB)。
ETest介绍

通用嵌入式系统自动化测试平台通用嵌入式系统测试平台(Embedded System Interface Test Studio,简称:ETest)是针对嵌入式系统进行实时、闭环、非侵入式测试的自动化测试平台,适用于嵌入式系统在设计、仿真、开发、调试、测试、集成验证和维护等各阶段配置项级别和系统级别的动态测试与验证。
ETest提供了针对嵌入式系统的半实物硬件在环仿真测试环境,通过模拟待测系统的外部环境并产生信号输入到待测系统,同时获取并分析待测系统的输出信号,实现针对嵌入式系统的自动化功能测试。
ETest具有适用范围广、通用性强、自动化测试程度高、扩展性好、携带方便、配置灵活、操作简单以及使用成本低等特点,能满足军事工业、工业控制、仪器仪表、汽车电子等各领域嵌入式系统的测试与验证需求。
1.1 ETest主要特点✧是一套完整的针对嵌入式系统的自动化动态确认测试平台,可以实现硬件在环、非侵入式的系统级测试,完成基于实装难以完成的测试任务;✧集成测试资源管理、测试环境描述、协议脚本开发、测试用例设计、测试执行监控、测试任务管理等功能为一体;✧具有通用化的通信协议定义与描述语言处理环境,可以定义和描述各类结构的总线协议;✧具有高度开放的协议模板管理接口,通过不断在测试中积累各领域的应用层协议,实现针对不同领域嵌入式系统自动化测试解决方案的快速构建;✧提供丰富的测试监控仪表和高度灵活的协议字段绑定方法,支持收发数据字段的双向绑定,并具有表达式绑定能力;✧集可视化窗体灵活配置的人工测试与脚本化语言高级开发的自动化测试于一体,满足初、中、高不同级别的测试需求;✧提供测试用例脚本编辑与开发环境,通过简单的通道与协议字段赋值,便可完成测试数据的收发与测试逻辑的判断;✧在底层实现了接口与通道管理、协议组包与解包、协议的校验、测试参数的组合等功能,测试人员只需将关注点放在测试逻辑的设计与实现上;✧具有插件化的功能扩充能力,无论是通信协议描述还是测试用例描述,平台都提供了对插件的开发支持;✧具有分布式的软件体系架构和计算能力,可实现从单机到多机不同规模的测试环境构建;✧可以完成单配置项单接口、单配置项多接口以及多配置项的系统测试任务;✧支持多种类型测试:功能测试、接口测试、边界测试、强度测试、安全性测试、恢复性测试、性能测试、敏感性测试、余量测试、容量测试、压力测试、随机测试、异常测试等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种基于仿真测试平台的实物自动化测试环境
摘要
针对FPGA软件测试过程中仿真测试和实物测试的不足,提出了一种基于仿真测试用例的实物自动化测试环境,将用于仿真测试的Testbench进行解析处理,形成能够用于FPGA 实物测试的传输信号,通过执行器将此信号转换为作用于被测FPGA芯片的实际信号,并采集被测FPGA芯片的响应,实现对FPGA的实物自动化测试。
采用实物自动化测试环境验证平台对设计架构进行了验证,取得了良好的效果。
0 引言
随着FPGA设计规模的不断扩大,因FPGA软件设计而造成的质量问题也越来越突出,成为影响装备质量的重要因素。
而测试是当前解决该问题的最有效手段,因此,越来越多的型号装备产品定型过程对FPGA软件测试提出了新的要求[3]。
然而FPGA测试与常规软件测试不同,因其测试环境限制,测试过程需大量依赖于仿真和分析的方法[4],而在实际芯片中开展的测试往往是板级、系统级测试,测试结果可信度低且无法有效发现FPGA软件设计缺陷[5-6]。
为此,本文提出了一种基于仿真测试平台Testbench数据的自动化测试环境框架,测试结果具有较高的可信度,能够有效提高FPGA 测试质量。
1 FPGA动态测试概述1.1 FPGA动态测试环境原理
当前型号装备FPGA定型测试过程主要方法包括设计检查、功能仿真、门级仿真、时序仿真、静态时序分析、逻辑等效性检查和实物测试。
其中功能仿真、门级仿真、时序仿真和实物测试均为动态测试,开展测试时需依据测试要求,建立FPGA运行的外围环境,根据测试对象的不同,可将此类环境分为仿真测试环境和实物测试环境。
采用仿真测试环境时,需根据测试用例将测试数据映射为不同时刻下的不同信号值,形成仿真测试平台文件Testbench,通过仿真测试工具将被测FPGA产生的响应进行采集和自动判断,形成测试结论[7]。