CCU6测试频率与占空比
中波技术手册
《中波广播发射台理论基础与实践技术手册》介绍【作者】庄涛【出版社】光明日报出版社【索书号】 ISBN 978-7-5112—6624-8【字数】 488千字(427页)【馆藏地点】样本书库【定价】 120元内容简介《中波广播发射台理论基础与实践技术手册》一书,是专门为中波广播发射台站值机员、技术人员编写的一本实用书籍,目的是为提高中波发射台值机员的业务理论知识和实际操作技能,为技术培训、职业技术鉴定提供科学、规范的依据。
本书内容涵盖了中波广播发射台值机员及技术管理人员应知应会的理论性知识和实践性知识。
全书共十二个章节,分别是:广播发展简史、中波广播理论综述、中波发射台概况、电工电子技术、仪器仪表的操作、信号源系统、DAM全固态数字调制中波发射机、PDM中波发射机的原理与维修、天馈线系统、自动化监控系统、配电系统、发射台技术防护,以及发射台理论知识要点总结、中波发射台技术能手竞赛试题精选和中波专业术语名词解释等四个附录。
本书特点抛去了繁杂的理论赘述和计算公式,以分类、特点、方法为基本内容;注重内容的可操作性和实用性。
以够用为度,图文并茂,通俗易懂,便于自学,便于查询。
内容既有初级值机员应知应会的理论与实践知识,又有高级值机员应具备的解决复杂问题的理论与实践知识,更加符合中波台各层次值机员的认知水平,特别适合做中波台技术人员的培训教材使用(本书有配套教学PPT课件,需另购)。
作者简介庄涛,大专学历,高级工程师,从事自动化电气设备的安装与维修工作,有三十多年的基础电器维修实践经验,具有较强的实际操作动手能力。
一九九八年从部队转业到河南省潢川中波台工作,从事中波技术维护工作,先后发表过二十多篇中波发射相关技术论文。
自主研发或创新的DX系列全固态中波发射机故障查询系统、多路循环监听控制器、中波发射台信号源系统的整合等项目曾分获河南省广播电影电影电视局科技创新一、二、三等奖。
本书配套教学PPT课件为了配合中波值机员培训,本书各章节都有配套教学PPT课件,PPT课件的特点是清新、生动、信息量大,通过现代化多媒体投影仪实用,能够优化课堂教学,调动课堂气氛,增加学员的理解和记忆程度.彻底改变了“一本书、一支粉笔、一块黑板”单调的教学模式。
FLUKE六类永久链路测试报告参数详解

FLUKE六类永久链路测试报告参数详解FLUKE六类永久链路测试报告参数详解Fluke DTX系列六类双绞线测试参数说明:1. 插入损耗:是指发射机与接收机之间,插入电缆或元件产生的信号损耗,通常指衰减。
插入损耗以接收信号电平的对应分贝(db )来表示。
对于光纤来说插入损耗是指光纤中的光信号通过活动连接器之后,其输出光功率相对Fluke DTX系列六类双绞线测试参数说明:1. 插入损耗:是指发射机与接收机之间,插入电缆或元件产生的信号损耗,通常指衰减。
插入损耗以接收信号电平的对应分贝(db)来表示。
对于光纤来说插入损耗是指光纤中的光信号通过活动连接器之后,其输出光功率相对输入光功率的比率的分贝数。
2. NEXT(近端串扰):是指在与发送端处于同一边的接收端处所感应到的从发送线对感应过来的串扰信号。
在串扰信号过大时,接收器将无法判别信号是远端传送来的微弱信号还是串扰杂讯。
3. PSNEXT(综合近端串扰):实际上是一个计算值,而不是直接的测量结果。
PSNEXT 是在每对线受到的单独来自其他三对线的NEXT 影响的基础上通过公式计算出来的。
PSNEXT 和FEXT(随后介绍)是非常重要的参数,用于确保布线系统的性能能够支持象千兆以太网那样四对线同时传输的应用。
4. ACR(衰减串扰比):表示的是链路中有效信号与噪声的比值。
简单地将ACR 就是衰减与NEXT 的比值,测量的是来自远端经过衰减的信号与串扰噪声间的比值。
例如有一位讲师在教师的前面讲课。
讲师的目标是要学员能够听清楚他的发言。
讲师的音量是一个重要的因素,但是更重要的是讲师的音量和背景噪声间的差别。
如果讲师实在安静的图书馆中发言,即使是低声细语也能听到。
想象一下,如果同一个讲师以同样的音量在热闹的足球场内发言会是怎样的情况。
讲师将不得不提高他的音量,这样他的声音(所需信号)与人群的欢呼声(背景噪声)的差别才能大到被听见。
这就是ACR。
ACR=衰减的信号-近端串扰的噪音5. PSACR(综合衰减串扰比):反映了三对线同时进行信号传输时对另一对线所造成的综合影响。
CCU6 输入捕获/输出比较单元6

比较 1
1
死区时间 控制
1
多通道控 制
trap 控制
3+3 2 2 2
3
1
捕获/比较 输入/输出 选择
端口控制
2009-1-21
E1 Training
Copyright © Infineon Technologies 2008. All rights reserved.
Page 7
输入捕获/输出比较单元6(CCU6) 用于电机控制的结构图
定时器 T13时钟 分频器( 1~128
)
FCPU
Input Control
Compare Timer 10/16 bit
16位定时器T13,只 能工作在比较模式 。主要用于调制的 场合。
PPeeriroioddRReegg. .
deadtime Control
Burst Mode
CCoComCmMpMpPRP2Re2geg. .
预分频
1: N
fper
N=1,2,4,8,16,32,64,128,256;x=0,1,2
E1 Training
Copyright © Infineon Technologies 2008. All rights reserved.
Page 10
输入捕获/输出比较单元6(CCU6) T12映射传送
2009-1-21
E1 Training
Copyright © Infineon Technologies 2008. All rights reserved.
工作寄存器
至硬件
Page 11
输入捕获/输出比较单元6(CCU6) T12比较模式
中心对齐方式:
占空比测量原理

占空比测量原理一、概述占空比测量是电子工程中常用的一种测量方法,用于测量信号的高电平时长与周期间隔的比值,常用于脉冲调制、PWM调光等应用中。
本文将深入探讨占空比测量的原理,包括其定义、测量方法、应用等。
二、占空比定义占空比(Duty Cycle)指的是信号在一个周期中的高电平时长占整个周期的比例。
一般以百分比来表示,例如50%的占空比表示信号的高电平时间等于周期的一半。
占空比的取值范围在0%到100%之间,其中0%表示低电平占主导,100%表示高电平占主导,50%表示高低电平时间相等。
三、占空比测量方法占空比的测量主要有以下几种方法:1. 频率测量法频率测量法是一种直接测量占空比的方法。
步骤如下: 1. 使用频率计测量信号的周期,记为T。
2. 使用占空比计算公式:占空比 = 高电平时间 / T * 100%。
2. 电压积分法电压积分法是一种间接测量占空比的方法。
步骤如下: 1. 将信号通过电阻电容滤波电路,使其转换成直流电压。
2. 将滤波后的信号输入到积分电路中,得到信号的积分值。
3. 使用示波器观察信号的波形,根据积分值计算占空比。
3. 时钟周期测量法时钟周期测量法是一种数字信号测量占空比的方法。
步骤如下: 1. 计算时钟周期的总数目N。
2. 统计高电平的持续时间,记为M。
3. 占空比 = M / N * 100%。
四、占空比测量应用占空比测量在许多电子设备和系统中都有广泛的应用,下面列举了一些常见的应用场景:1. 脉冲调制在脉冲调制中,占空比用于控制脉冲的宽度,从而实现对信号的调制。
例如,在脉冲宽度调制(PWM)中,通过改变占空比来控制LED的亮度。
2. PWM调光占空比也广泛应用于PWM调光技术中。
通过改变占空比,可以控制LED灯的亮度,实现调光的功能。
3. 电机控制在电机控制中,占空比可以用来控制电机的转速。
通过改变占空比,可以调整电机的驱动电压和电流,从而控制转速和力矩。
五、结论占空比测量是电子工程中常用的一种测量方法,用于测量信号的高电平时长与周期间隔的比值。
超声波频率和占空比
超声波频率和占空比超声波频率和占空比是超声波技术中的两个重要参数。
超声波频率指的是超声波信号振动的次数,通常以赫兹(Hz)为单位表示。
而占空比是指超声波信号高电平存在的时间与周期的比值,通常以百分比形式表示。
超声波频率是超声波技术中最基本的参数之一。
不同的应用需要不同的超声波频率。
常见的超声波频率范围为20kHz至100MHz。
频率越高,超声波波长越短,穿透力越强,但散射和衰减也会增加。
因此,在选择超声波频率时,需要根据具体的应用需求来进行选择。
超声波频率对于超声波技术的应用有着重要的影响。
在医学领域,超声波的频率一般选择在1MHz至20MHz范围内。
在这个频率范围内,超声波可以穿透人体的软组织,并能提供良好的图像分辨率。
而在工业领域,超声波的频率通常较高,可以检测更小的缺陷或材料的微观结构。
此外,超声波的频率也会受到传感器、声波耦合介质等因素的限制。
占空比是超声波技术中另一个重要的参数。
占空比是指超声波信号在一个周期内高电平存在的时间与整个周期的比值。
占空比通常以百分比形式表示,比如50%的占空比表示高电平存在的时间占整个周期的一半。
占空比对于超声波技术的应用也有着重要的影响。
占空比的大小会直接影响超声波信号的能量输出和功率密度。
当占空比较小时,超声波信号的能量输出较低,功率密度较小,适用于一些对能量要求较低的应用。
而当占空比较大时,超声波信号的能量输出较高,功率密度较大,适用于一些对能量要求较高的应用。
此外,占空比的大小还会对超声波信号的稳定性和工作温度产生影响,需要根据具体需求进行选择。
总结起来,超声波频率和占空比是超声波技术中两个重要的参数。
超声波频率会影响超声波的穿透力、分辨率和图像质量,需要根据具体应用需求进行选择。
占空比会影响超声波信号的能量输出和功率密度,需要根据能量要求、稳定性和工作温度等因素进行选择。
对于不同的应用,需要根据具体需求对超声波频率和占空比进行合理选择,以获得最佳的超声波效果。
lcd的占空比与偏压概念
关于LCD的占空比和偏压比的概念
2007年04月10日星期二10:25
最近用到HT1621里面有这个东西,今天弄明白写在这里。
插播广告欢迎大家加入qq群19097943一起讨论
占空比
将所有公共电极(COM)各施加一次扫描电压的时间叫一帧,单位时间内扫描多少帧的频率叫帧频,将扫描公共电极(COM)选通的时间与帧周期之比叫占空比。
通常占空比等于公共电极数N的倒数,即1/N。
偏压比
LCD的驱动波形由几级电平组成,为防止对比度不均匀,在不点亮象素对应的电极上仍加有一定电压,这对降低点亮象素产生的交叉干扰和防止对比度不均匀很重要。
LCD中非点亮象素(非选点)的电压有效值与点亮象素(选择点)电压有效值之比(1/n)称为偏压比。
LCD的驱动电压(VLCD)
LCD的驱动电压为加在点亮部分的段电压与公共电压之差(峰-峰值)。
安泰信示波器说明书
2.安全术语和标记
警告高压
保护性终端
小心请参阅用户手册
03
内容提要
本手册介绍ADS1000系列数字示波器的操作的有关信息。手册包括以下章节: ◆“入门”一章介绍了示波器的前面板、用户界面、功能检查及探头补偿。 ◆ “功能介绍及操作”一章对示波器的功能及操作做了系统详细的介绍。 ◆ “应用示例”一章包括许多测量示例,供读者参考。 ◆ “系统提示及故障排除”一章对系统提示信息进行了说明并列举了一些简单故
第1章入门 ..............................................................................................................
1.1 初步了解的前面板和用户界面..................... ........................................................07 1.2 功能检查................................................................................................................09 1.3 探头.......................................................................................................................10
USB Device: 支持PictBridge直接打印及与PC连接远程控制;RS-232
01
DAVE代码自动生成软件操作指南(8
Infineon DAVE代码自动生成软件操作指南(8 bit MCU 部分)注意。
声明:由于本公司人力有限,发生错误在所难免,一切以Infineon公司提供的相关IC datasheet等资料为准,欢迎目录前言 (1)1 Project Settings:工程设置 (2)2 T0/T1:定时器0/1 (5)3 UART:串行通信接口 (11)4 Interrupt Unit:中断管理单元 (17)5 UART1:串行通信接口1 (23)6 T2:定时器T2 (29)7 T21:定时器T21 (34)8 ADC:模数转换单元 (40)9 CCU6:捕获比较单元6 (55)10 Multi CAN (74)11 SSC:高速串行接口 (90)12 Watch Dog Timer:看门狗定时器 (97)13 Power Saving Mode:省电模式 (100)14 Port:设置I/O口属性 (104)前言Infineon DAVE是Infineon MCU一个非常好的Infineon MCU软件设计助手,它可以在设计者对Infineon MCU的寄存器了解不是很深入的情况下,编写出准确的软件驱动代码。
比如说CCU6的驱动等。
DAVE软件的安装。
请参考相关屏幕录象MCU驱动的安装请参考相关的屏幕录象打开后的主界面如图0-1:图0-1工具条如图0-2图0-2从左向右分别主要为。
1.相关资料关联控件2.新建项目3.打开项目4.保存5.生成代码1 Project Settings:工程设置概述:XC800 MCU的总体设置。
该窗口主要是用来设置MCU的总体参数。
打开菜单的方法:File -> Project Settings1.1 General:总体设置界面如图1-1图1-1Controller Details:控制器详细Device:在该菜单中选择器件。
选择好后会在右边显示出该MCU的一些主要参数,主要是最高频率,Flash的大小等Main Source File:主源文件File name:主源文件名。
英飞凌tricore用户手册 第24章 捕捉比较单元CCU6
注: 在 写 访 问 地 址 段 内 的 地址 ( 被 相 同 的 芯 片 选 择信 号覆 盖 ) , 但 不 是 与该模 块明 确提到的地 址 时 , 不 考 虑 对该 模 块 的 写 访 问 。 对读访问来说该准则同样有效。在 读访问另一个地址的情况下,该 模块 没有响应。
位寄存器
复位 类3 类3 类3
页码 24-100 24-103 24-105
INP
中断节点指针 ACH U, SV U, SV 0000 3940H 类3
24-110
寄存器
IEN
中断使能
B0H U, SV U, SV 0000 0000H 类3
24-107
寄存器
用户手册 CCU6, V0.3
24-9
CMPSTAT CMPMODIF T12MSEL TCTR0 TCTR2 TCTR4
调制控制寄 存器
MODCTR TRPCTR PSLR MCMCTR MCMOUTS MCMOUT
IS ISS ISR INP IEN
ID寄存器
ID
LI IMON KSCFG KSCSR MCFG PISEL 2 PISEL 0
定时器12 块功能
• 有三个捕获/比较通道,每个通道都可任意用作捕获或比较通道。 • 支持产生三相PWM(六个输出、高侧和低侧开关的单独信号) • 16位分辨率,最大计数频率=外设时钟 • 为每个通道提供死区时间控制以避免在上电阶段上出现短路。 • 并发更新T12寄存器 • 可产生中心对齐和沿对齐的PWM • 支持单触发模式 • 可以用外部事件控制启动 • 有计数外部事件的能力 • 一些中断请求源 • 类滞回比较控制模式
移量 读写
CC62SR
SPWM例程介绍
unsigned int VF_Mul_F; //unsigned int VF_Mul_F = 0xffff;
VF_Mul_F = (int)F_OUT * VF_RATIO; if(index >=0 && index < 250)
void init_SPWM(void); void SPWM_VVVF(void);
SPWM_VVVF.C /* imports */ #include "main.h" #include "SPWM_VVVF.h" /* variables */ static float u_index = 0,v_index = 333,w_index = 667; static unsigned int Tu,Tv,Tw; static float step; unsigned int F_OUT = 200;
unsigned char Get_F_Command() {
unsigned char Freq; // get F_Command;
//e.g.
Freq = 50; return Freq; }
unsigned int UVW_Cal(unsigned int index) {
unsigned char state; unsigned int comp_temp; const unsigned int Neutral = 0xce3;
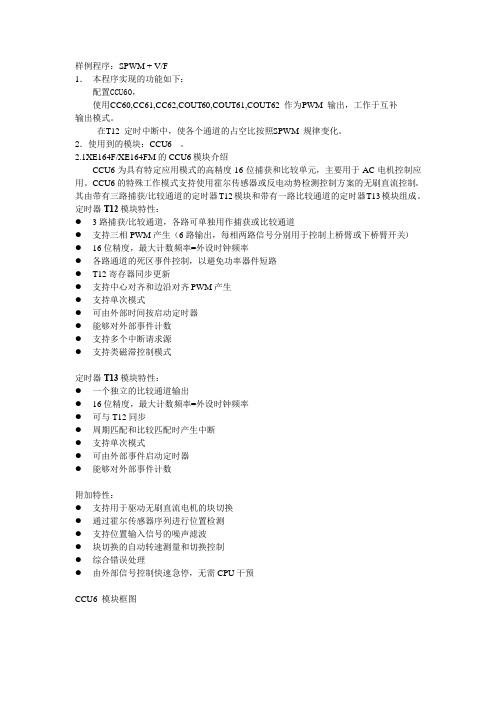
样例程序:SPWM + V/F 1. 本程序实现的功能如下:
配置CCU60, 使用CC60,CC61,CC62,COUT60,COUT61,COUT62 作为PWM 输出,工作于互补 输出模式。
在T12 定时中断中,使各个通道的占空比按照SPWM 规律变化。 2.使用到的模块:CCU6 。 2.1XE164F/XE164FM 的 CCU6 模块介绍
CCU输入捕获/输出比较单元

输入捕获/输出比较单元6(CCU6)英飞凌XC800系列单片机写在前面本篇内容为英飞凌科技有限公司(Infineon Technologies CO., LTD.)的XC800系列单片机的基础篇之一。
如无特别说明,所指的产品为XC800系列单片机中的首款型号:XC866。
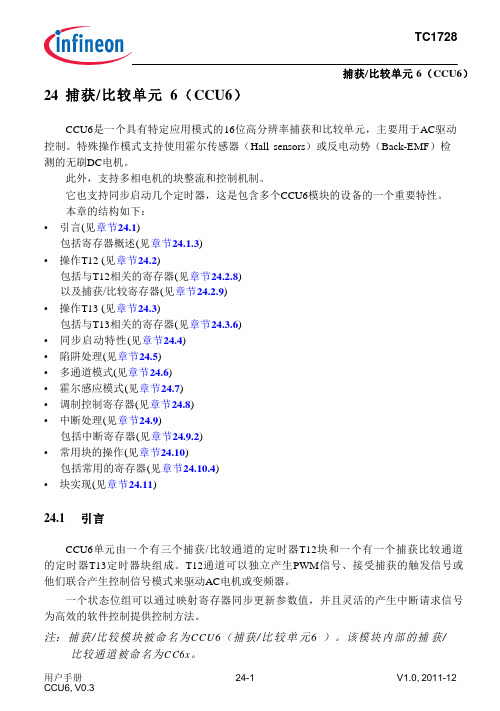
由于后续芯片会有更多的改进/增加措施,如需要关注其它产品,需要再结合相应的产品数据手册(Data Sheet)和用户手册(User Manual)! 由于版本更新等原因,可能会出现各版本间的资料说法有略微差异,请以英飞凌网站公布的最新英文版本的产品数据手册(Data Sheet)和用户手册(User Manual)为准!资源简介CCU6单元中有两个独立的计数器:T12和T13,可被用来产生脉宽调制(PWM)信号,尤其适用于控制交流电机的应用场合。
CCU6支持用于块交换和多相电机的专用控制模式。
除了适合电机控制以外,CCU6单元还可以单独用作输入捕捉和输出比较的应用。
3路捕获/比较通道,每路可用作捕获或比较通道。
支持产生三相PWM(6路输出,对应上桥臂或下桥臂开关)。
16位精度,最大计数频率=外设时钟频率。
单通道死区时间控制,避免功率级短路。
同步刷新T12/T13寄存器。
产生中间对齐和边缘对齐PWM。
支持单次模式。
支持多中断请求源。
类磁滞控制模式。
单一比较通道,单输出。
16位精度,最大计数频率=外设时钟频率。
可与T12同步。
周期匹配和比较匹配,产生中断。
支持单次模式。
3+3捕获比较输入/输出选择端口控制16位定时器T12,带有映射寄存器3通道寄存器并带有映射寄存器比较模式边沿/中心对齐方式映射传输时,映射寄存器中的内容传送到实际工作寄存器 输出引脚的状态根据比较结果进行翻转占空比可由0~100%进行调节捕获模式定时器T12的捕获值可由通道寄存器读出可用于脉冲宽度的测量等领域= 1?= ?= ?= 0?T12PRCC6xR T12PSCC6xSRT12计数16 Bit预分频1: N比较值映射传输周期值映射传输比较-匹配周期-匹配0-匹配(边沿对齐模式)1-匹配(中心对齐模式)161616f per在捕获模式下,T12的值复制到CAPCOM 的相应寄存器中。
ect输入捕捉测占空比

ect输入捕捉测占空比引言电子控制技术(Electronic Control Technology,ECT)已经广泛应用于各个领域,对于测量和控制电力系统中的电流、电压、频率等参数起到了至关重要的作用。
而在实际的电子控制系统中,测量占空比也是一项关键任务,它能够帮助我们了解信号的真实情况,从而进行相应的控制和调整。
本文将对ect输入捕捉测占空比进行全面、详细、完整的探讨。
一、ect输入捕捉技术简介ect输入捕捉技术是一种使用电路或芯片在特定的时间点捕捉输入信号的技术。
通过捕捉输入信号的高电平和低电平时间长度,可以计算得到占空比。
在电子控制系统中,尤其是电力系统中,占空比是指周期信号中高电平时间占总周期时间的比例。
占空比通常用百分比表示,它描述了信号高电平的持续时间与周期的比例关系。
ect输入捕捉技术能够精确地测量占空比,为电子控制系统的精确控制和调整提供了有效的手段。
下面我们将详细介绍ect输入捕捉测占空比的原理、方法和应用。
二、ect输入捕捉测占空比原理ect输入捕捉测占空比的原理是基于计算输入信号的高电平时间和总周期时间的比例。
具体流程如下:1.输入信号的边沿检测:首先,ect系统需要检测输入信号的边沿,包括上升沿和下降沿。
这一步可以通过电路或芯片内部的触发器或计数器实现。
2.边沿时间的捕捉:一旦检测到输入信号的边沿,ect系统会立即捕捉当前的系统时间,记录下此刻的时钟计数值。
3.计算占空比:在一周期内,ect系统会通过相同的方式捕捉输入信号的下一个边沿,并记录下此刻的时钟计数值。
通过计算这两个时钟计数值之间的差值,可以得到高电平持续的时间。
再与总周期时间相除,即可计算得到占空比。
ect输入捕捉测占空比的原理是基于时钟计数值的差值计算,因此在设计这一系统时,需要考虑到时钟的精度与分辨率,以确保测量结果的准确性。
三、ect输入捕捉测占空比方法ect输入捕捉测占空比的方法有多种,下面介绍其中两种常用的方法:1. 硬件实现方式硬件实现方式是通过电路来实现ect输入捕捉测占空比。
利用ICP测量频率
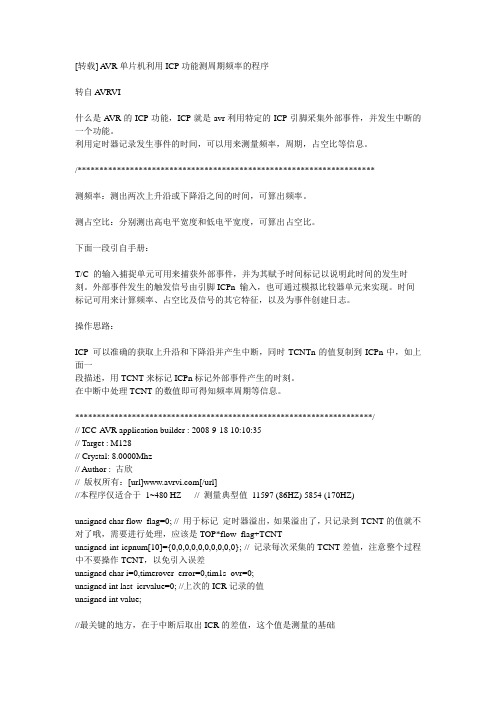
[转载] A VR单片机利用ICP功能测周期频率的程序转自A VRVI什么是A VR的ICP功能,ICP就是avr利用特定的ICP引脚采集外部事件,并发生中断的一个功能。
利用定时器记录发生事件的时间,可以用来测量频率,周期,占空比等信息。
/********************************************************************测频率:测出两次上升沿或下降沿之间的时间,可算出频率。
测占空比:分别测出高电平宽度和低电平宽度,可算出占空比。
下面一段引自手册:T/C 的输入捕捉单元可用来捕获外部事件,并为其赋予时间标记以说明此时间的发生时刻。
外部事件发生的触发信号由引脚ICPn 输入,也可通过模拟比较器单元来实现。
时间标记可用来计算频率、占空比及信号的其它特征,以及为事件创建日志。
操作思路:ICP 可以准确的获取上升沿和下降沿并产生中断,同时TCNTn的值复制到ICPn中,如上面一段描述,用TCNT来标记ICPn标记外部事件产生的时刻。
在中断中处理TCNT的数值即可得知频率周期等信息。
********************************************************************/// ICC-A VR application builder : 2008-9-18 10:10:35// Target : M128// Crystal: 8.0000Mhz// Author : 古欣// 版权所有:[url][/url]//本程序仅适合于1~480 HZ // 测量典型值11597 (86HZ) 5854 (170HZ)unsigned char flow_flag=0; // 用于标记定时器溢出,如果溢出了,只记录到TCNT的值就不对了哦,需要进行处理,应该是TOP*flow_flag+TCNTunsigned int icpnum[10]={0,0,0,0,0,0,0,0,0,0}; // 记录每次采集的TCNT差值,注意整个过程中不要操作TCNT,以免引入误差unsigned char i=0,timerover_error=0,tim1s_ovr=0;unsigned int last_icrvalue=0; //上次的ICR记录的值unsigned int value;//最关键的地方,在于中断后取出ICR的差值,这个值是测量的基础#include <macros.h>#include <iom128v.h>// Time=PRE*(MAX-TCNT+1) /F_cpu单位S//TIMER1 initialize - prescale:8// WGM: 0) Normal, TOP=0xFFFF// desired value: 1KHz// actual value: 1.000KHz (0.0%)void timer1_init(void){TCCR1B = 0x00; //stopTCNT1H = 0x00;TCNT1L = 0x00;ICR1H = 0x00;ICR1L = 0x00;TCCR1A = 0x00;TCCR1B = 0xC2; //start Timer}//ICP1引脚上升沿发生中断,如果需要测占空比,在此中断中按条件更改中断方向。
滚动轴承频谱分析详解

滚动轴承频谱分析详解对于滚动轴承不能只依赖振动总量来精确评估滚动轴承的状态,也不能完全依赖超声频带测量:振动尖峰能量(Spike Energy)、高频加速度(High FrequencyAcceleration-HFD)、冲击脉冲(Shock Pules-SPM)。
只有将超声测量与振动特征信号分析结合使用才是最好的评定轴承的状态。
滚动轴承一旦产生故障,会产生以下四种类型频率的每一种:随机的超声频率:频率范围5000~60000HZ,测量使用方法:振动尖峰能量、高频加速度、冲击脉冲,这些用于检测轴承的初始故障。
振动尖峰能量烈度图:高频加速度和冲击脉冲的比较烈度表:轴承部件的自振频率:频率范围500~2000HZ,轴承零部件受到冲击时,以它们的自振频率“瞬时扰动”。
在滚动轴承中,滚动元件打击内外环跑道上的缺陷的间断的冲击激起它们的自振频率。
但故障扩展到微观大小时,它们开始激起这些轴承零部件的自振频率,成为“第二个检测症兆”。
故障恶化时,可引起更大的冲击,这些更大的冲击产生更大的自振频率尖峰响应。
磨损严重时,在这些共振附近出现更多频率分量,它们中许多是这些自振频率的1X转速的边带(往往,这些调制尖峰以轴承的故障频率为间隔,而不是1X转速频率的边带)。
轴承自振频率与转速无关,但它们的响应幅值与冲击速度成正比,意味着转速越高,响应幅值也越高。
旋转轴承的故障频率:轴承零部件故障频率与轴承的平均直径-Pa、滚动体直径-Ba、滚动体数目-Nb和接触角-ø有关。
FTF-保持架故障频率、BSF-滚动体故障频率、BPOR-内环故障率、BPIR-外环故障频率。
FTF、BSF、BPOR、BPIR简易计算公式(可参考平台内前期文章介绍)。
轴承故障频率都是转速频率的非整数倍(本人所遇确实如此,但曾看到过一篇文章说正好是转速频率整数倍)。
正常情况下滚动轴承故障频率不应存在,当存在轴承故障频率时,可以说明轴承至少发出初始故障信号。
2.5mhz占空比

2.5mhz占空比
2.5MHz占空比是指在一个周期内,信号处于高电平的时间与周期总时间的比值。
占空比通常用百分比表示,可以通过以下公式计算:
占空比 = (高电平时间 / 周期时间) 100%。
在2.5MHz的情况下,如果我们已知高电平时间为T1,周期时间为T,则占空比可以表示为:
占空比 = (T1 / T) 100%。
占空比的大小对于数字电路和信号处理非常重要。
在数字系统中,占空比可以影响信号的稳定性、功耗以及电路的工作频率。
因此,设计和分析数字电路时,需要考虑占空比的合适取值。
在实际应用中,2.5MHz信号的占空比可以根据具体的系统要求进行调整,以满足特定的性能指标。
例如,在脉冲调制、通信系统和数字控制系统中,占空比的选择会对系统的性能产生重要影响。
因此,在设计和应用中需要仔细分析和计算占空比,以确保系统的正常工作和性能优化。
频率计与占空比
频率计和占空比测量电路的设计引言:随着科技的进步和发展,微处理器的性能逐渐提高,因此现在的频率计设计大部分是采用单片机来实现。
因为处理器的工作频率很高,所以测量精度很高,误差比较小。
但是由于采用单片机来实现的话还要软件的结合,因此对于编程能力较差的我采用纯硬件电路来实现。
占空比是脉冲信号的一个基本参数,不论在脉冲信号设计中,还是在脉冲信号的应用中,都需要知道脉冲的占空比,不同的应用情况对占空比的要求也不相同,因此准确快速地测量出脉冲占空比也就十分必要。
测量占空比的方法主要有示波器比较法,单片机计算法,平均值转换法等,示波器比较法简单易行,但不能直接准确快速的飞鼠读数,单片机法虽然直接准确的显示出数值,但需要软件硬件配合,设计比较麻烦;平均值转换法电路简单,但需要将脉冲信号转换成平均值电压再进行A/D转换,而其他的一些测量方法虽然能克服上述方法的缺点,但是具体测量应用时却受到一些限制,于是,本文提出了一种全数字式的调频计数测量法。
一.频率计设计思路:众所周知,频率就是周期的倒数,因此就是信号在单位时间内的脉冲数。
所以要测脉冲数必然要用到计数芯片,要显示脉冲数就要用到数码管,还有锁存和译码器。
又因为计数时间是一秒,所以555芯片来实现单稳态触发时间为一秒的触发信号。
二.芯片介绍:1.4518计数芯片-----------------功能图:2. 4511译码器功能图:三.功能模块1.触发信号模块2.4518计数模块3.4511锁存模块4.数码管显示模块5.信号控制输入模块补充:以上的电路是正对时钟信号的频率测量,对于正弦信号和三角波信号的测量,都可以把其转化为时钟信号后在测量即可。
四.整体模块图五.占空比测量电路设计对于占空比的测量,我想大家最先想到测量方式就是用示波器,这很简单但是不方便,比较流行的是用单片机的中断功能。
后通过软件编程即可实现,对于单片机外围电路设计比较简单,所以受到很多人都很青睐,但是还是那句老话对于编程能力较差的我只能通过纯硬件来实现。
母线电压采样和占空比

母线电压采样和占空比1. 介绍在电力系统中,母线电压采样和占空比是两个重要的参数。
母线电压采样用于监测电力系统中的电压变化,而占空比则是用来描述周期性信号的占空时间比例。
本文将详细介绍母线电压采样和占空比的概念、原理、应用以及相关的技术。
2. 母线电压采样2.1 概念母线电压采样是指通过采样器对电力系统中的母线电压进行采样和监测的过程。
采样器通常是一种电子设备,用于将连续的电压信号转换为离散的数字信号,以便于后续的处理和分析。
2.2 原理母线电压采样的原理基于采样定理,即根据尼奎斯特定理,采样频率必须大于被采样信号的最高频率的两倍。
在电力系统中,母线电压通常是50Hz或60Hz的正弦波信号,因此采样频率需要至少为100Hz或120Hz。
常见的母线电压采样方式有两种:离散采样和连续采样。
离散采样是指按照固定的时间间隔对电压信号进行采样,得到一系列离散的采样值。
连续采样则是指通过模拟-数字转换器(ADC)将连续的电压信号转换为一系列离散的数字信号。
2.3 应用母线电压采样在电力系统中有广泛的应用。
首先,它可以用于监测电力系统中的电压变化,以便及时发现并解决电压异常问题。
其次,它可以用于电力系统的保护和控制,例如过电压保护和电压调节。
此外,母线电压采样还可以用于电力系统的故障诊断和分析,以及电力系统的负荷调度和能源管理。
3. 占空比3.1 概念占空比是指周期性信号中占空时间比例的大小。
在电力系统中,占空比通常用来描述交流电源中的脉冲宽度调制(PWM)信号的特性。
脉冲宽度调制是一种通过改变脉冲信号的宽度来控制输出功率的技术。
3.2 原理占空比的计算方法是将脉冲信号的高电平时间与一个周期的总时间进行比较。
通常,占空比的取值范围在0到1之间,可以表示为百分数或小数形式。
当占空比为0时,表示信号的高电平时间为0,即信号完全处于低电平状态。
当占空比为1时,表示信号的高电平时间为一个周期的总时间,即信号完全处于高电平状态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. 根据待测波形频率与占空比计算波形的周期值,正频宽时间,负频宽时间.2. 选择合适的T12分频比,设置的分频比后时钟分辨率不能导致T12溢出.例如:80HZ的周期为12.5ms;T12溢出时间设置为25ms.触发上升沿中断,触发下降沿中断,再次触发上升沿中断。
假设设置分频比为fclk/8 = 0.333usec, 25,000/0.333 = 0x 1,24FF;超出T12计数范围.分频比选择不合适。
Fclk/16 = 0.667, 25,000/0.6667 = 0x927A;T12计数器未溢出满足要求。
3. T12的溢出时间设置为待测波形周期的2倍时间.4. 根据Dave工具配置工程.4.1 使能CCU模块 4.2 配置采样引脚 4.3 配置T12定时器 4.4 配置中断 4.5 配置采样模式4.6 配置函数双寄存器模式四:任意沿采样.CC6N任意沿将CC6nSR中的内容复制到CC6nR中,T12的实际计数值立即保存在映射寄存器CC6nSR 中。
第一种计算方法:// USER CODE BEGIN (NodeI0,1)unsigned int HighWidth,LowWidth;// USER CODE ENDvoid SHINT_viXINTR10Isr(void) interrupt XINTR10INT{// USER CODE BEGIN (NodeI0,2)unsigned int uiCapRiseL, uiCapFallL,uiCapRiseH, uiCapFallH;// USER CODE ENDSFR_PAGE(_su3, SST0); // switch to page 3// CCU6 Node 0 interrupt handling section...读映射寄存器CC6nSR函数读通道寄存器CC6nR函数if (IRCON3 & 0x01) // if CCU6SR0{IRCON3 &= ~(ubyte)0x01;// USER CODE BEGIN (NodeI0,3)// USER CODE ENDSFR_PAGE(_cc3, noSST); // switch to page 3if(CCU6_ISL & 0x01) //if ISL_ICC60R{//capture, compare match rising edge detection an channel 0SFR_PAGE(_cc0, noSST); // switch to page 0CCU6_ISRL = 0x01; //clear flag ISL_ICC60R// USER CODE BEGIN (NodeI0,10)SFR_PAGE(_cc1,SST0);uiCapFallH = CCU6_CC60RLH;SFR_PAGE(_cc1,RST0);uiCapRiseH = CCU6_CC60SRLH;LowWidth = 0xFFFF + 1 + uiCapRiseH - uiCapFallH;// USER CODE END}SFR_PAGE(_cc3, noSST); // switch to page 3if(CCU6_ISL & 0x02) //if ISL_ICC60F{//capture, compare match faling edge detection an channel 0SFR_PAGE(_cc0, noSST); // switch to page 0CCU6_ISRL = 0x02; //clear flag IS_ICC60F// USER CODE BEGIN (NodeI0,11)SFR_PAGE(_cc1,SST0);uiCapRiseL = CCU6_CC60RLH;SFR_PAGE(_cc1,RST0);uiCapFallL = CCU6_CC60SRLH;HighWidth = 0xFFFF + 1 + uiCapFallL - uiCapRiseL;// USER CODE END}} // End of CCU6SR0 condition check// USER CODE BEGIN (NodeI0,5)// USER CODE ENDSFR_PAGE(_su3, RST0); // restore the old SCU page} // End of function SHINT_viXINTR10Isr红色字体标注部分为添加的代码段.typedef struct{float Freq;float Duty;}CCU6_INFO;extern unsigned int HighWidth,LowWidth;void main(void){// USER CODE BEGIN (MAIN_Main,2)CCU6_INFO stCCU6_Results;// USER CODE ENDMAIN_vInit();// USER CODE BEGIN (MAIN_Main,3)// USER CODE ENDwhile(1){// USER CODE BEGIN (MAIN_Main,4)stCCU6_Results.Duty = HighWidth * 1.0 / ( (ulong)HighWidth + LowWidth ); stCCU6_Results.Freq = 1000000.0/( ((ulong)HighWidth + LowWidth) *0.66667 ); PLC_D[1] = stCCU6_Results.Freq * 100;PLC_D[2] = stCCU6_Results.Duty * 1000;// USER CODE END}} // End of function main第二种计算方法:uword ubbuff[3] = {0};ubyte capture_ris = 0;// USER CODE ENDvoid SHINT_viXINTR10Isr(void) interrupt XINTR10INT{// USER CODE BEGIN (NodeI0,2)// USER CODE ENDSFR_PAGE(_su3, SST0); // switch to page 3// CCU6 Node 0 interrupt handling section...if (IRCON3 & 0x01) // if CCU6SR0{IRCON3 &= ~(ubyte)0x01;// USER CODE BEGIN (NodeI0,3)// USER CODE ENDSFR_PAGE(_cc3, noSST); // switch to page 3if(CCU6_ISL & 0x01) //if ISL_ICC60R{//capture, compare match rising edge detection an channel 0SFR_PAGE(_cc0, noSST); // switch to page 0CCU6_ISRL = 0x01; //clear flag ISL_ICC60R// USER CODE BEGIN (NodeI0,10)if (capture_ris == 0 ){ubbuff[0] = CC6_uwGetChannelShadowRegister_CC6_CHANNEL_0(); capture_ris = 1;}else if (capture_ris == 2){ubbuff[2] = CC6_uwGetChannelShadowRegister_CC6_CHANNEL_0(); capture_ris = 3;IEN1 &= ~0x10;}// USER CODE END}SFR_PAGE(_cc3, noSST); // switch to page 3if(CCU6_ISL & 0x02) //if ISL_ICC60F{//capture, compare match faling edge detection an channel 0SFR_PAGE(_cc0, noSST); // switch to page 0CCU6_ISRL = 0x02; //clear flag IS_ICC60F// USER CODE BEGIN (NodeI0,11)if (capture_ris == 1){ubbuff[1] =CC6_uwGetChannelShadowRegister_CC6_CHANNEL_0();capture_ris = 2;}// USER CODE END}} // End of CCU6SR0 condition check// USER CODE BEGIN (NodeI0,5)// USER CODE ENDSFR_PAGE(_su3, RST0); // restore the old SCU page} // End of function SHINT_viXINTR10Isrtypedef struct{uword Freq;float Duty;}CCU6_INFO;extern uword ubbuff[3];extern ubyte capture_ris;CCU6_INFO CCU6_Freq_Duty(uword *pBuf){uword CCU6_Pulse,CCU6_Cycle;CCU6_INFO stCCU6;CCU6_Pulse = (uword)(0xFFFF + pBuf[1] - pBuf[0] + 1); CCU6_Cycle =(uword)(0xFFFF + pBuf[2] - pBuf[0] + 1); stCCU6.Duty = CCU6_Pulse*1.0/CCU6_Cycle;stCCU6.Freq = 1000000.0/(CCU6_Cycle * 0.333); return (stCCU6);}void main(void){// USER CODE BEGIN (MAIN_Main,2)// USER CODE ENDMAIN_vInit();// USER CODE BEGIN (MAIN_Main,3)capture_ris = 0;// USER CODE ENDwhile(1){// USER CODE BEGIN (MAIN_Main,4)CCU6_INFO CCU6_Results;if (capture_ris == 3){CCU6_Results = CCU6_Freq_Duty(ubbuff);ubbuff[0] = 0;ubbuff[1] = 0;ubbuff[2] = 0;capture_ris = 0;IEN1 |= 0x10;}PLC_D[1] = CCU6_Results.Freq;PLC_D[2] = CCU6_Results.Duty*1000;// USER CODE END}} // End of function main。