电动机转速测定系统的设计有大图
某工厂电动机系统原理设计cad图纸
基于LabVIEW的电机转速控制系统设计

图 4 中 , V 1 产生模拟脉冲信号 , 参数设置如下 : 脉冲幅 值 3 V , 上升时间 10μs , 下降时间 10 μs , 脉宽 60 ms , 周期 125 ms , 频率 8 Hz 。R6 、R7 及 C5 的值根据滤波效果可调整 , 最后选定 R6 = 510 K , Rz = 30 K , C5 = 1μF 。此时具有最佳的 滤波效果 。
关键词 : 虚拟仪器 ; 锁相环 ; LabV IEW
System Design Electro - motor Rotational Speed Control Based on of LabVIEW
Li Nan , Teng Fei ( School of Materials Science and Engineering , Shanghai Jiao Tong U niversity , Shanghai 200240 , China)
Key words : virt ual inst rument ; p hase locked loop ; LabV IEW
0 引言
振动焊接是一种在焊接过程中对焊接工件施加振动的新技 术 。该技术可以有效的提高工件焊接质量 , 并降低生产和时间 成本 。振动焊接是通过控制带有偏心块的电动机的振动频率来 工作的 , 因此 , 在对该技术的控制中 , 很重要的一项内容是控 制电动机的转速 。目前已有的振动焊接控制系统 , 对电机的转 速控制主要用单片机做硬件控制 , 以 C 语言做编程 。在操作 性及与其他软件的兼容性上存在一些不足 。本研究开发了以锁 相环为核心 , 以 N I 数据采集卡和 LabV IEW 为平台的电机转 速控制系统 , 该系统能够充分利用锁相环的精确锁相功能 , 实 现很高的控制精度 , 同时实现在软件界面上的控制操作 , 并且 能够与其他应用软件良好兼容 。很好的实现了对振动焊接工作 频率的控制 。
基于JN338的电动机转矩转速测量系统设计
目录摘要---------------------------------------------------------------1 关键词-----------------------------------------------------------------1 1 前言---------------------------------------------------------------1 1.1 研究的目的和意义------------------------------------------------11.2 发展背景----------------------------------------------------------22 转矩转速测量系统原理-------------------------------------------------3 2.1 介绍转矩转速传感器JN338--------------------------------------------3 2.2 JN338转矩测量系统原理--------------------------------------------4 2.3 JN338转速测量系统原理----------------------------------------------6 2.3.1 转速测量的一般方法-----------------------------------------------62.3.2 转速测量原理----------------------------------------------------113 系统设计-----------------------------------------------------------13 3.1 系统功能概述-----------------------------------------------------13 3.2 硬件设计----------------------------------------------------------14 3.2.1 单片机的选型-------------------------------------------------14 3.2.2 硬件电路设计思路 ----------------------------------------------14 3.2.3 硬件电路设计 --------------------------------------------------15 3.2.4 单片机介绍及单片机控制模块-------------------------------------15 3.2.5 JN338转矩转速传感器控制模块-----------------------------------26 3.2.6 片外储存器2732-----------------------------------------------27 3.2.7 上机通讯模块---------------------------------------------------28 3.3 软件设计---------------------------------------------------------31 3.3.1 主程序流程图-------------------------------------------323.3.2 数码管显示子程序流程图------------------------------------------32 3.3.3 报警子程序流程图------------------------------------------------32 3.3.4 超速子程序流程图------------------------------------------------333.3.5可存储查询子程序流程图---------------------------------------344 结论---------------------------------------------------------------34 参考文献-------------------------------------------------------------34 致谢------------------------------------------------------------------36 附录------------------------------------------------------------------37 元件清单-------------------------------------------------------------492基于JN338的电动机转矩转速测量系统摘要::工农业生产中,常常要求对电动机的转矩转速进行测量,以满足工农业的需求,本文说明了由JN338和单片机AT89C52构成的转矩转速测量系统的基本原理,设计该系统的硬件电路、软件系统与上位机通信关键词:单片机;测量;转速;转矩;传感器Design of The Motor Speed Measurement System Based on JN338Abstract:In the production of industry and agriculture, often calls on motor torque speed are measured, in order to meet the industrial and agricultural needs, this article illustrates by JN338and MCU AT89C52constitute the torque and rotational speed measurement system the basic principle, design of the system hardware circuit, software system and host computer communicationKeywords:Microcontroller; Measurement;peed; torque; sensor11 前言1.1 研究的目的和意义传统的旋转动力系统转矩测试,通常是采用电阻应变桥来检测转矩信号并借助于导电滑环来实现电阻应变桥能源的输入及应变信号的输出,但是,由于被测轴在高速旋转时会产生颤振,使接触点处的接触电阻发生变化,从而使测量误差增大。
步进电机转速和步数检测设计
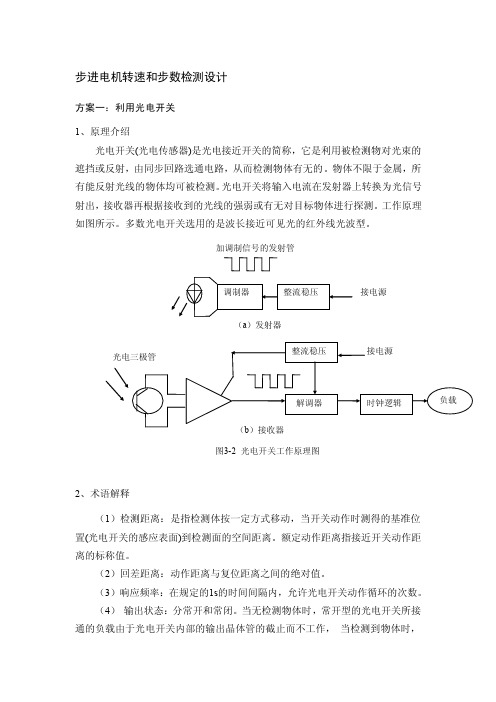
步进电机转速和步数检测设计方案一:利用光电开关1、原理介绍光电开关(光电传感器)是光电接近开关的简称,它是利用被检测物对光束的遮挡或反射,由同步回路选通电路,从而检测物体有无的。
物体不限于金属,所有能反射光线的物体均可被检测。
光电开关将输入电流在发射器上转换为光信号射出,接收器再根据接收到的光线的强弱或有无对目标物体进行探测。
工作原理如图所示。
多数光电开关选用的是波长接近可见光的红外线光波型。
图3-2 光电开关工作原理图2、术语解释(1)检测距离:是指检测体按一定方式移动,当开关动作时测得的基准位置(光电开关的感应表面)到检测面的空间距离。
额定动作距离指接近开关动作距离的标称值。
(2)回差距离:动作距离与复位距离之间的绝对值。
(3)响应频率:在规定的1s的时间间隔内,允许光电开关动作循环的次数。
(4)输出状态:分常开和常闭。
当无检测物体时,常开型的光电开关所接通的负载由于光电开关内部的输出晶体管的截止而不工作,当检测到物体时,晶体管导通,负载得电工作。
(5)检测方式:根据光电开关在检测物体时发射器所发出的光线被折回到接收器的途径的不同,可分为漫反射式、镜反射式、对射式等。
(6)输出形式:分NPN 二线、NPN 三线、NPN四线、PNP二线、PNP三线、PNP四线、AC二线、AC 五线(自带继电器),及直流NPN/PNP/常开/常闭多功能等几种常用的输出形式。
(7)表面反射率:漫反射式光电开关发出的光线需要经检测物表面才能反射回漫反射开关的接受器,所以检测距离和被检测物体的表面反射率将决定接受器接收到光线的强度。
粗糙的表面反射回的光线强度必将小于光滑表面反射回的强度,而且,被检测物体的表面必须垂直于光电开关的发射光线。
(8)环境特性:光电开关应用的环境亦会影响其长期工作可靠性。
当光电开关工作于最大检测距离状态时,由于光学透镜会被环境中的污物粘住,甚至会被一些强酸性物质腐蚀,以至其使用参数和可靠性降低。
永磁同步电动机调速控制系统的设计

永磁同步电动机调速控制系统的设计引言一、控制系统结构设计1.速度控制回路速度控制回路中一般采用PID控制器进行控制。
PID控制器由比例、积分和微分三个控制参数组成。
根据实际的反馈信号和设定的目标转速进行比较,PID控制器输出控制信号,调节电机的输入电压,从而实现对电机转速的精确控制。
2.电流控制回路电流控制回路中一般采用电流矢量控制算法进行控制。
电流矢量控制是一种通过控制电机的相电流矢量方向和大小,实现对电机转矩的精确控制的方法。
在永磁同步电动机中,通常通过调节电机的电压和频率来控制电流。
二、电机参数辨识与模型建立在控制系统设计前,需要对永磁同步电动机的参数进行辨识。
参数辨识是通过对电机的测试实验数据进行分析和处理,得到电机的相关参数,如电感、电阻、转矩常数等。
通过辨识得到的电机参数,可以建立电机的数学模型,用于控制系统设计和仿真分析。
1.参数辨识方法参数辨识可以使用多种方法,如静态法、动态法和频率扫描法等。
静态法是通过给电机施加不同的电压和载荷,测量相应的电流和转矩,根据测量数据拟合得到电机的参数。
动态法是通过给电机施加特定的电压和频率,测量相应的响应数据,利用系统辨识的方法得到电机的参数。
频率扫描法是通过改变电机的频率,测量相应的电流和转矩,根据传递函数的理论计算得到电机的参数。
2.永磁同步电动机模型建立三、控制策略设计对于永磁同步电动机的调速控制系统,可以采用多种控制策略,如传统的PI控制、模糊控制和模型预测控制等。
1.PI控制PI控制是最常用的控制策略之一,通过调节比例和积分系数来实现对电机转速的控制。
PI控制简单可靠,但对于电机模型的误差和扰动比较敏感。
2.模糊控制模糊控制是一种基于经验和模糊推理的智能控制方法,通过建立模糊规则和模糊推理机制,实现对电机的转速控制。
模糊控制能够在不确定性和非线性环境中实现较好的控制效果。
3.模型预测控制模型预测控制是一种基于模型预测和优化求解的控制方法,通过建立电机的预测模型,并进行优化求解,实现对电机的转速控制。
电动机转速测量系统设计

电动机转速测量系统设计[摘要] 采用基于VC++的上位机软件作为转速测量平台,下位机采用ATmega8单片机作为控制核心,用直流电动机作为受控对象。
转速由增量式编码器测得,用PWM的方法控制电动机,电动机转速数据通过RS232接口实时传送到上位机。
上位机软件可将转速数据绘成曲线图,通过曲线图可测量电动机在不同时刻的转速。
[关键词] 电动机转速测量VC++电动机转速测量系统设计,采用ATmega8单片机作为控制核心,用自带增量式编码器测速的直流电动机作为受控对象,转速信号反馈到单片机,并充分利用单片机内部的PWM调制器控制直流电动机的转速,同时将电动机转速实时传送到上位机,基于VC++的电动机转速测量系统分析平台以曲线图形式将电动机转速变化情况直观地呈现在上位机软件平台上。
通过软件平台上的刻度尺,可直接读取电动机的实时转速并可储存测量的转速数据。
1.转速测量系统方案电动机转速测量系统的方案组成框图如图1所示。
ATmega8单片机为控制核心,通过其片内PWM调制器产生控制电动机的PWM信号,经过功率放大电路放大后驱动直流电动机,增量式编码器用于采集直流电动机的转速信号,转换为TTL电平后反馈到单片机,单片机对反馈的数据进行处理后,通过RS232接口将采集到的电动机转速数据实时发送到上位机,基于VC++编程开发的“电动机转速测量分析平台”不断接收来自单片机发来的转速数据,并将之绘成曲线图,使电动机的转速变化一目了然。
系统中的直流电动机选用的是Sankyo生产的直流电动机,该电动机额定电压为12 V、额定电流为0.05 A,、额定转速为1 500 rpm,该电动机还自带增量式编码器,输出频率为60 ppr,其频率与电动机的转速成比例关系,编码器输出为TTL电平方波信号,可直接作为单片机计数器的触发信号,测量编码器输出信号的频率即可获得电动机的转速数据。
电动机的转速数据通过RS232接口传输到上位机,电动机转速测量分析平台接收到单片机传送的电动机转速数据后,将之绘成曲线,从界面上的坐标刻度可测量出某一时刻的电动机转速值。
电动机调速系统的建模与分
电动机调速系统的建模与分析目录一、设计目的 (1)二、初始条件 (1)三、设计基本思路 (2)四、系统原理框图 (2)五、双闭环调速系统的动态结构图 (3)六、参数计算 (4)1. 有关参数的计算 (4)2. 电流环的设计 (4)3. 转速环的设计 (6)七、系统仿真 (8)1. 使用普通限幅器进行仿真 (8)2. 积分输出加限幅环节仿真 (10)3. 使用积分带限幅的PI调节器仿真 (11)总结 (14)参考文献 (15)英语翻译 (15)电动机调速系统的建模与分析摘要:根据实际应用要求以及给定参数,对转速、电流双闭环直流调速系统进行设计,计算其控制系统的参数,并通过matlab软件的simnlink,对设计的系统进行仿真,以验证设计的正确性,并分析仿真结果,从而进一步说明双闭环调速系统的可行性与优越性。
对计算过程做了着重重视,详细精炼,可以为高校学生参与调速研究提供细节性的指导。
关键词:双闭环直流调速 matlab 仿真一、设计目的1.联系实际,对晶闸管-电动机直流调速系统进行综合性设计,加深对所学《自动控制系统》课程的认识和理解,并掌握分析系统的方法。
2.熟悉自动控制系统中元部件及系统参数的计算方法。
3.培养灵活运用所学自动控制理论分析和解决实际系统中出现的各种问题的能力。
4.设计出符合要求的转速、电流双闭环直流调速系统,并通过设计正确掌握工程设计的方法。
5.掌握应用计算机对系统进行仿真的方法。
二、初始条件1.技术数据(1)直流电机铭牌参数:P N =90KW, U N =440V, I N =220A, n N=1500r/min,电枢电阻Ra=0.088Ω,允许过载倍数λ=1.5;(2)晶闸管整流触发装置:Rrec=0.032Ω,Ks=45-48。
(3)系统主电路总电阻:R=0.12Ω(4)电磁时间常数:T1=0.012s(5)机电时间常数:Tm =0.1s(6)电流反馈滤波时间常数:Toi=0.0025s,转速率波时间常数:Ton=0.014s.(7)额定转速时的给定电压:Unm =10V(8)调节器饱和输出电压:10V2.技术指标(1)该调速系统能进行平滑的速度调节,负载电机不可逆运行,具有较宽的调速范围(D≥10),系统在工作范围内能稳定工作错误!未指定书签。
直流电机转速测量系统的设计
一、概述该课程设计是关于直流电动机转速的测量。
转速是电动机极为重要的一个状态参数,一般是指电机转子的每分钟转数,通常用r/min表示。
本次课程设计选用光电测速法,测量电路由光电转换电路,整形电路,晶体振荡电路,分频电路,倍频电路,时序控制电路和计数、译码、驱动、显示电路构成,电机转速的测量范围为600r/min~30000r/min,测量的相对误差<1%并用5位LED数码管显示出相应的电机转速。
本次课设需满足以下设计要求:1根据技术指标,设计各部分电路并确定元器件参数;2. 用5位LED数码管显示出相应的电机转速;3. 画出电路原理图(元器件标准化,电路图要规范化)。
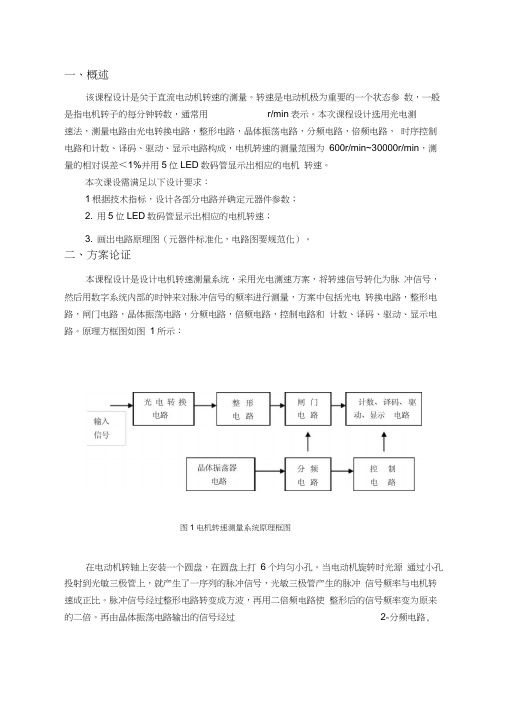
二、方案论证本课程设计是设计电机转速测量系统,采用光电测速方案,将转速信号转化为脉冲信号,然后用数字系统内部的时钟来对脉冲信号的频率进行测量,方案中包括光电转换电路,整形电路,闸门电路,晶体振荡电路,分频电路,倍频电路,控制电路和计数、译码、驱动、显示电路。
原理方框图如图1所示:图1电机转速测量系统原理框图在电动机转轴上安装一个圆盘,在圆盘上打6个均匀小孔。
当电动机旋转时光源通过小孔投射到光敏三极管上,就产生了一序列的脉冲信号,光敏三极管产生的脉冲信号频率与电机转速成正比。
脉冲信号经过整形电路转变成方波,再用二倍频电路使整形后的信号频率变为原来的二倍。
再由晶体振荡电路输出的信号经过215分频电路,产生1Hz的基准信号,再经过10分频,便可产生一个0.1Hz的基准信号,该基准信号用来控制闸门电路,把经过倍频的光电转换后的信号计数并显示出来三、电路设计1.光电转换电路在该部分可以用发光元件作为光的发射部分,可以选择发光二极管作发光元件,接收部分则要选择光敏三级管作为接受部件。
其原理是用光敏三极管接收发光二极管通过小孔发射过来的光信号。
在电机的转轴上安装上已打好6个均匀小孔的圆盘,让发光二极管与光敏三极管通过小孔相对,这样电机每转动一周,光线就会相应通过小孔6次,因为光电转换器受光一次就会产生一个脉冲,所以说电机在每转一周后就会相应的产生了6个脉冲。
直流电机转速控制系统
本文介绍了一种以AT89S51单片机为核心的直流电机转速控制系统的原理。
它主要是通过对基于单片机的电机驱动和转速数据测量模块的研究设计其核心控制系统,该控制系统主要包括硬件装置和控制软件两部分。
本系统由AT89C51单片机、测量电路、显示电路、控制电路、驱动电路和电源电路等组成。
介绍了直流电机调速的相关知识,及PWM调整的基本原理和实现方法。
系统应用H桥式驱动电路,采用红外光电传感器作为速度检测传感器,并应用LCD1602作为显示器。
系统控制输出采用PWM数字信号驱动电路对电机调速,并给出了相应的电子电路。
采用的电子元器件简单普遍,线路连接简单,安装调试容易,测量结果精确,具有较高的实用价值。
关键字:直流电机、AT89S51、PWM、传感器IIn this paper,it introduced the principle of DC motor SR system which is mainly composed AT89S51 microcontroller series. It’s mainly study of the motor drive and speed data Measurement module based on MSC to designed the core control system. The control system mainly include hardware devices and software control. The system mainly include AT89S51 Microcontrollers, the speed detection circuit, the display circuit, the keyboard circuit, the speed driver circuit and the power circut. And introduces some relative knowledge upon the DC motor, PWM adjust of the basic principles and methods. The system uses the speed driver H circuit. It uses Infrared photoelectric sensor as speed detecting sensor,and uses LCD1602 as monitor.It uses PWM signal as control output to regulate speed.and all the corresponding electronic circuits are given.The adoptive electronics components is simple and widespread, and the circuit conjunction is simple, installing to adjust to try easy, measure result precision, therefore have high and practical value.Key words: DC machines , AT89S51, PWM, sensorII目录前言 (1)1直流电机转速控制系统概况 (2)1.1直流电机简介 (2)1.2直流电机调速发展过程 (3)1.3直流电机国内外发展状况 (3)1.4直流电机调速发展前景 (4)2总体设计和系统分析 (5)2.1直流电机转速控制系统框图 (5)2.2直流电机转速控制系统设计要求 (5)2.3基本工作原理 (5)2.3.1直流电机转速调节原理 (5)2.3.2PWM脉宽调制原理及实现方法 (6)3 系统硬件设计 (8)3.189S51单片机 (8)3.2.1 89S51单片机简介 (8)3.2.2 89S51单片机引脚功能 (9)3.2.3单片机中断系统 (11)3.2.4单片机定时器/计数器简介 (13)3.2键盘电路 (15)3.3显示电路 ............................................ 错误!未定义书签。
电机转速测量系统设计讲解

毕业设计(论文)题目:电机转速测量系统设计院(系)光电工程学院专业测控技术与仪器班级100106班姓名叶亚锋学号100106117导师李党娟2014 年 5 月20 日电机转速测量系统设计西安工业大学光电工程学院叶亚锋摘要:电机是电力系统的主要设备,而电机转速是衡量动力系统正常工作的重要的性能指标,因而需要测量电机转速,使它满足人们的各种需求。
在本设计中多次采用施密特触发器,成为电路的主控芯片,控制着信号的定时和锁純。
用三片CD40110BE级联实现电路的计数、译码、数码管的驱动等功能,通过对光电耦合器产生的脉冲数进行统计,并把所得到的计数脉冲转化为电机的转速值,利用施密特触发器完成数器的清零和锁純,计数器计数译码后将信号输送到数码管,动态的显示脉冲数目,最后根据脉冲数目计算电机的转速。
本设计采用的电子元器件简单普遍,线路连接简单,安装调试容易,测量结果精确,具有较高的实用价值。
关键词:光电耦合器;施密特触发器;计数器;数码显示。
Design of motor speed measurement system Abstract: The motor is the main equipment of power system, and the motor speed is an important performance ind ex to measure the power system normal operation, therefore need to speed measuring motor, make it meet the needs of peopl e. The Schmidt trigger multipl e times in the d esign of main circuit, a control signal timing and l ock the key part of pure. Circuit realization of counting, d ecoding, digital tube driver functions with three slice CD40110BE cascad e, statistics through the pulse number on the photoelectric coupl er, and count the pulses to the motor speed value, compl ete number is cl ear and pure use l ock Schmidt flip-fl op, counter after d ecoding the signal transmitted to the the digital tube dynamic display, pulse number, pulse number according to the cal culated motor speed. El ectronic components used in this d esign simpl e and common, simpl e circuit, easy installation, accurate measurement result, and has higher practical value.Keywords:photoelectric coupler;Schmidt trigger;timer;counter;digital display.目录第一章绪论 (4)1.1课题研究的目的和意义 (4)1.2 转速测量在国内外的研究 (4)1.3电机转速的测量方法 (5)1.3.1测频法“M法” (5)1.3.2测周期法“T法” (6)1.3.3 测频测周法“M/T法” (7)第二章转速测量系统的总体方案 (9)2.1 设计任务 (9)2.2设计思路 (9)2.3原理框图 (9)2.4设计的意义 (9)第三章系统硬件电路的设计 (10)3.1 主控芯片的选择 (10)3.2 硬件电路的实现 (10)3.2.1电源电路 (10)3.2.2电机转速脉冲产生电路 (11)3.2.3计数电路 (14)3.2.4控制电路 (16)3.2.5显示电路设计 (19)第四章电路的焊接与调试 (21)4.1电路连接过程的注意事项 (21)4.2电路的调试 (22)4.3转速测量系统的误差分析 (24)第五章总结与展望 (25)5.1 总结 (25)5.2 展望 (25)致谢 (26)参考文献 (27)附录:电机转速测量系统原理图 (28)第一章绪论1.1课题研究的目的和意义电机是将电能从最初的能源形式转换过来的重要桥梁,又是再将大部分电能转换为机械能的装置,电机在电力工业、工矿企业、农业、交通运输业、国防、科学文化及日常生活等方面都是十分重要的设备,在电力工业中,将机械能转换为电能的发电机以及将电网电压升高或降低的变压器,都是电力系统中的关键设备。
电动机转速测量

《便携式转速测量仪》的实验方案组员:张良汪志威王飞一、课题意义转速表是机械行业必备的仪器之一,用来测定电机的转速、线速度或频率。
指针指示符合传统视认习惯,又便于计算机远程处理和网络化要求,所以数字化步进电机仪表是现代汽车仪表和摩托车仪表的发展趋势,Switec公司的步进电机在国内外已广泛用于各种汽车、摩托车和工程机械仪表。
车用微型步进电机是一种专用的新型汽车仪表配件,利用它设计的仪表既符合传统视认习惯又能满足数化处理要求,是现代化仪表的理想配件。
常用于电机、电扇、造纸、塑料、化纤、洗衣机、汽车、飞机、轮船等制造业。
大多常用的为手持离心式转速表。
转速仪测量在国民经济的各个领域,都是必不可少的。
二、设计要求1. 测量电机转速范围0——9999转/分;2. 体积小巧,轻便;3.全量程范围误差<0.03%;4. 测量距离小于300毫米;三、类似原理目前,关于转速测量的方案比较多,从传感器的安装方式来分,有接触式和非接触式两种;按传感器的类别来分,就有磁电、磁敏、光电(光纤)、霍尔等方式,下面先从这两个侧面来介绍转速传感器的选用方案:方案1:接触式测量这种测量方式一般适用中、低转速的测量。
传感器与被测旋转轴,通过弹性联轴器连接,传感器安装固定时,要求出轴与被测旋转轴尽量保持同一条直线,在较高速时尤其严格。
这种测速方式一般选用的传感器有光电、磁电和霍尔等式样,一般测速范围在0~4000转/分。
测速时每周脉冲数在100以下(如SGB-4A光电转速传感器)。
在转速低于1转/分时,可选用光电编码器(如CHA-1光电编码器),每周脉冲数可高达2000以上。
这种接触式测量在6000转/分~几十万转/分就不能满足要求,我们一般可选用以下几种非接触式测量方式。
方案2:盘式磁性测量被测旋转轴上固定一个发讯盘,发讯盘上一个同心圆上均匀分布若干个孔或凹槽,转速传感器可为磁电转速传感器(SM-16)或磁敏转速传感器(SMS-10/12)。
基于单片机的电机转速测量仪设计

摘要本文讨论了以STC89C51单片机为核心的电机转速测量的硬件设计和软件设计,硬件主要由光电传感器、信号整形、LED数码管显示几局部组成。
详细介绍了利用光电传感器技术在电机转速测量中的实现及应用,以及对电机转速进展测量,并由数码管显示转速。
随着汽车及电子技术的开展,转速测量技术也在不断创新,各种转速测量仪在工业得到广泛应用,对电机的转速进展测量极大的提高了自动化程度。
关键字:单片机,光电传感器,信号整形,LED显示Design of Motor Speed Measurement InstrumentBased on MCUAbstractThis article discussed take STC89C51 monolithic integrated circuit as the core electrical machinery tachometric survey hardware design and the software design, the hardware mainly by the photoelectric sensor, t he signal shaping, the LED nixietube demonstrated that several parts compose. Introduced in detail the use photoelectric sensor technology and applies in electrical machinery tachometric survey's realization, as well as carries on the survey to the electri cal machinery rotational speed, and demonstrates the rotational speed by the nixietube. Along with the automobile and electronic technology's development, the tachometric survey technology unceasingly is also innovating, each kind of rotational speed measu ring instrument obtains the widespread application in the industry, carried on the survey enormous enhancement automaticity to electrical machinery's rotational speed.Keywords:Monolithic integrated circuit,Photoelectric sensor,Signal shaping,LED demonstrated目录1 绪论41.1设计题目41.2课题背景42 转速测量系统的设计52.1 转速测量方法及比拟52.1.1测频原理62.1.2.测周原理72.1.3.计数器原理72.2测量方案设计92.2.1 转速测量原理92.2.2 系统原理93 硬件电路设计103.1 电源模块103.1.1 LM2596开关电压调节器113.1.2 单片机和显示供电电路123.1.3 电机电源供电电路133.2单片机模块133.2.1 复位电路143.2.2 晶振电路153.2.3 单片机系统163.3 显示模块213.4 红外模块224 软件设计244.1 软件设计概述244.2 软件设计方案244.3 系统主程序254.4 显示子程序264.5 中断子程序275 系统调试285.1硬件调试285.2 软件调试295.3系统综合调试30结论31附录32参考文献40致411 绪论1.1设计题目题目:转速测量仪要求完成技术指标:1. 测量电机转速围0——9999转/分;2.通电就开场测量,按键后复位;3.八位数码管显示,误差<5%;1.2课题背景目前,在工程实践中,经常会遇到各种需要测量转速的场合。
实验3:电机转速测量实验

实验3 电机转速测量实验一、实验目的:了解开关式霍尔传感器、磁电传感器和光电传感器测量电机转速的原理。
二、基本原理:开关式霍尔传感器是线性霍尔元件的输出信号经放大器放大,再经施密特电路整形成矩形波(开关信号)输出的传感器。
开关式霍尔传感器测转速的原理框图3—1所示。
当被测圆盘上装上6只磁性体时,圆盘每转一周磁场就变化6次,开关式霍尔传感器就同频率f相应变化输出,再经转速表显示转速n。
图3-1 开关式霍尔传感器测转速原理框图磁电传感器是一种将被测物理量转换成为感应电势的有源传感器,也称为电动式传感器或感应式传感器。
根据电磁感应定律,一个匝数为N的线圈在磁场中切割磁力线时,穿过线圈的磁通量发生变化,线圈两端就会产生出感应电势,线圈中感应电势:Φ=-de Ndt。
线圈感应电势的大小在线圈匝数一定的情况下与穿过该线圈的磁通变化率成正比。
当传感器的线圈匝数和永久磁钢选定(即磁场强度已定)后,使穿过线圈的磁通发生变化的方法通常有两种:一种是让线圈和磁力线作相对运动,即利用线圈切割磁力线而使线圈产生感应电势;另一种则是把线圈和磁钢部固定,靠衔铁运动来改变磁路中的磁阻,从而改变通过线圈的磁通。
因此,磁电式传感器可分成两大类型:动磁式及可动衔铁式(即可变磁阻式)。
本实验应用动磁式磁电传感器,实验原理框图如图3-2所示。
当转动盘上嵌入6个磁钢时,转动盘每转一周磁电传感器感应电势e产生6次的变化,感应电势e通过放大、整形由频率表显示f,转速n=10f。
图3-2磁电传感器测转速实验原理框图光电式转速传感器有反射型和透射型二种,本实验装置是透射型的(光电断续器也称光耦),传感器端部二内侧分别装有发光管和光电管,发光管发出的光源透过转盘上通孔后由光电管接收转换成电信号,由于转盘上有均匀间隔的6个孔,转动时将获得与转速有关的脉冲数,脉冲经处理由频率表显示f,即可得到转速n=10f。
实验原理框图如图3-3所示。
图3-3 光耦测转速实验原理框图三、需用器件与单元:主机箱中的转速调节0~24V直流稳压电源、+5V直流稳压电源、电压表、频率\转速表;转动源、霍尔转速传感器、磁电传感器、光电转速传感器—光电断续器(已装在转动源上)。
霍尔式传感器转速测量系统的设计PPT课件

(2)介质变化型:
介质变化型是在电容器 的两个固定电极板之间嵌 入一块高介电常数的可动 板而构成的。
可动介质板与转动轴相 连,随着转动轴的旋转, 电容器板间的介电常数发 生周期性变化而引起电容 量的周期性变化,其速率 等于转动轴的转速。
图中齿轮外沿面作为电 容器的动极板,当电容器定 极板与齿顶相对时,电容量 最大,而与齿隙相对时,电容 量最小。因此,电容量的变 化频率应与齿轮的转频成 正比 。
端产生的电动势。根据电磁感应定律,感应电动势的大小与霍尔元件输出电 极引线构成的感应面积成正比。
4)自激场零电势 霍尔元件控制电流产生自激场,由于元件的左右两半场相等,故产生的
电势方向相反而抵消。实际应用时由于控制电流引线也产生磁场,使元件左 右两半场强不等,因而有霍尔电势输出,这一输出电势即是自激场零电势。在 上述的四种零位误差中,寄生直流电势、感应零电势和自激场零电势,是由于 制作工艺上的原因而造成的误差,可以通过工艺水平的提高加以解决,而不等 位电动势所造成的零位误差,则必须通过补偿电路给予克服。
霍尔式转速传感器设计
组员:冯超 张琪琪 曹强 姜长青 蔡庆瑶
•
工程实践中,经常会遇到各种
需要测量转速的场合,例如在发电
机、电动机、卷扬机、机床主轴等
旋转设备的试验、运转和控制中,
常需要分时或连续测量和显示其转
速和瞬时转速。
•
转速测量的应用系统在工业生
产、科技教育、民用电器等各领域
的应用极为广泛,往往成为某一产
2.零位误差的补偿电路
在实验中发现,对于霍尔 元件来说,不等位电动势与 不等位电阻是一致的,因此, 可以将霍尔元件等效为一 个电桥,并通过调整其电阻 的方法来进行补偿图4为霍 尔元件的结构,其中A、B 为控制电极,C、D为霍尔 电极,在极间分布的电阻用 R1、R2、R3、R4表示,等 效电路如图5所示。
课程设计---直流电动机测速系统设计

专业课程设计题目三直流电动机测速系统设计院系:专业班级:小组成员:指导教师:日期:前言1.题目要求设计题目:直流电动机测速系统设计描述:利用单片机设计直流电机测速系统具体要求: 8051 单片机作为主控制器、利用红外光传感器设计转速测量、检测直流电机速度,并显示。
元件: STC89C52、晶振(12MHz)、小按键、 ST151、数码管以及电阻电容等2.组内分工(1)负责软件及仿真调试:主要由完成(2)负责电路焊接:主要由完成(3)撰写报告:主要由完成3.总体设计方案总体设计方案的硬件部分详细框图如图一所示 :数码管显示按键控制单片机 PWM 电机驱动一、转速测量方法转速是指作圆周运动的物体在单位时间内所转过的圈数,其大小及变化往往意味着机器设备运转的正常与否,因此,转速测量一直是工业领域的一个重要问题。
按照不同的理论方法,先后产生过模拟测速法 (如离心式转速表) 、同步测速法(如机械式或闪光式频闪测速仪) 以及计数测速法。
计数测速法又可分为机械式定时计数法和电子式定时计数法。
本文介绍的采用单片机和光电传感器组成的高精度转速测量系统,其转速测量方法采用的就是电子式定时计数法。
对转速的测量实际上是对转子旋转引起的周期脉冲信号的频率进行测量。
在频率的工程测量中,电子式定时计数测量频率的方法一般有三种:①测频率法:在一定时间间隔t 内,计数被测信号的重复变化次数N ,则被测信号的频率fx 可表示为f x =Nt(1)②测周期法:在被测信号的一个周期内,计数时钟脉冲数m0 ,则被测信号频率fx = fc/ m0 ,其中, fc 为时钟脉冲信号频率。
③多周期测频法:在被测信号m1 个周期内, 计数时钟脉冲数m2 ,从而得到被测信号频率fx ,则fx 可以表示为fx =m1 fcm2, m1 由测量准确度确定。
电子式定时计数法测量频率时, 其测量准确度主要由两项误差来决定: 一项是时基误差 ; 另一项是量化± 1 误差。
基于单片机的无刷直流电机速度伺服系统设计

基于单片机的无刷直流电机速度伺服系统设计————————————————————————————————作者:————————————————————————————————日期:论文名称:基于单片机的直流伺服电机测速系统设计学科专业:申请人:指导老师:摘要在工程实践中,经常会遇到各种需要测量电机转速的场合,例如在发动机、电动机、机床主轴等旋转设备的试验运转和控制中,常需要分时或连续测量、显示其转速及瞬时速度。
当前主要流行的测速方法有霍尔测速、磁电式测速和光电编码测速等,但是霍尔测速不仅价格相对较高,而且信号杂波大,需要额外的滤波电路开销;而磁电式测速容易受外界环境干扰,因此不适合用于强电磁干扰的工业环境,本系统采用光电编码测试进行速度伺服系统设计。
为了能精确地测量转速,且保证测量的实时性,本文提出了一种基于单片机的直流伺服电机测速系统设计方案。
该系统通过定时器模拟PWM控制电机转速,采用外部中断的边沿触发功能捕获测速脉冲,并以此分析计算出电机转速,然后显示到LED数码管上面;此外,为了达到更精确的电机控制,设计的串行通信方案,通过PC机下传指令改变PWM输出占空比,以此控制电机转速。
系统软件在Keil C51集成开发环境中采用C语言编写,并在Proteus软件中搭建电路,仿真验证了方案的可行性。
关键词:测速;单片机;直流伺服电机;串行通信ABSTRACT目录摘要 (3)ABSTRACT (4)目录 (5)第一章绪论............................................................................ 错误!未定义书签。
1。
1 课题研究意义.. (7)1。
2 国内外发展现状 (7)1.3 论文组织 (8)第二章系统方案设计 (9)2.1 硬件设计方案 (9)2。
2 软件设计方案 (10)第三章硬件设计 (11)3。
1硬件框图设计 (11)3.2主控制器模块 (11)3.2。
直流电机转速闭环控制系统设计matlab

直流电机转速闭环控制系统设计概述直流电机是一种常见的电动机类型,具有体积小、转速范围广、转矩特性好等优点,被广泛应用于工业控制系统中。
而转速闭环控制系统是一种常见的控制策略,可以实现对直流电机转速的精确控制。
本文将介绍如何使用MATLAB进行直流电机转速闭环控制系统的设计。
系统建模在进行控制系统设计之前,首先需要对直流电机进行建模。
直流电机可以简化为一个旋转质量和一个电动势,通过施加不同的电压来调节转速。
根据电路定律和力矩平衡原理,可以得到直流电机的数学模型。
1. 旋转质量建模假设直流电机的旋转质量为J,角速度为ω,则其动力学方程可以表示为:J * dω/dt = Tm - Tl其中Tm是由施加在电机上的扭矩,Tl是由负载引起的扭矩。
通常情况下,Tm与输入电压U之间存在线性关系:Tm = k * U其中k是一个常数。
2. 电动势建模假设直流电机的电动势为Ke,电流为I,则其电路方程可以表示为:V = Ke * ω + R * I其中V是电机的输入电压,R是电机的内阻。
将上述两个方程联立,可以得到直流电机的数学模型:J * dω/dt = k * U - Tl - B * ωV = Ke * ω + R * I其中B是摩擦系数。
控制器设计在得到直流电机的数学模型之后,可以开始设计转速闭环控制系统。
控制器的目标是根据给定的转速信号来调节输入电压,使得实际转速与给定转速保持一致。
1. PI控制器常用的控制器类型之一是PI(比例-积分)控制器。
PI控制器通过比例和积分两个部分来调节输出信号。
比例部分根据误差信号进行调节,积分部分则用于消除稳态误差。
2. 闭环传递函数通过将直流电机的数学模型进行转换和简化,可以得到闭环传递函数。
闭环传递函数描述了输入和输出之间的关系,用于设计控制器。
3. 调节参数选择在设计PI控制器时,需要选择合适的调节参数。
常用的方法是根据系统的频率特性和稳态误差要求来选择参数。
4. 控制器实现使用MATLAB可以方便地实现控制器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要在电气时代的今天,电动机在工农业生产与人们日常生活中都起着十分重要的作用。
直流电机作为最常见的一种电机,具有非常优秀的线性机械特性、较宽的调速范围、良好的起动性以及简单的控制电路等优点,因此在社会的各个领域中都得到了十分广泛的应用。
系统主要功能是:AT89C51单片机接受霍尔传感器传来的脉冲信号,单片机根据外部中断,以及内部定时器进行计数计算出电机转速送到LED并显示,外部装有蜂鸣器电路,在超速或低俗过低都会停止电动机,蜂鸣器发音,显示器不显示,从实用角度看,评价一个系统实用价值的重要标准,就是这个系统对社会生活和科技观念有多大的贡献。
本设计以单片机为核心设计一个电动机转速测定及数据显示控制系统,要求对转速范围在0-3000r/min的直流调速电动机或交流变频调速电动机进行测量并显示,转速数据显示精度要达到转速个位数,有转速高、低限报警提示。
本设计使用6V直流电机。
将霍尔传感器产生的脉冲信号输入到单片机外部中断0口,单片机工作在内部定时器工作方式0,对周期信号进行计数,调用计算公式计算出转速,调用显示程序在LED上,其主要内容是单片机部分主要完成电机转速的测量,LED显示部分主要是把转速显示出来,显示范围在0-3000r/min 之间。
本设计主要研究直流电机的控制和测量方法,效率高,电路简单,使用也比较广泛,测速系统采用集成霍尔传感器敏感速率信号,具有频率响应快、抗干扰能力强等特点。
从而对电机的控制精度、响应速度以及节约能源等都具有重要意义。
关键词:直流电机;单片机;转速控制IAbstractToday at the age of electricity, electric motors in industrial and agricultural production and people's daily life plays an important role. DC motor as the most common type of motor has a very good linear mechanical properties, a wide speed range, a good start of and the advantages of simple control circuit, so in all areas of society have been very extensive application.System main function is: AT89C51 microcontroller to accept Hall sensor signals transmitted pulse, single chip based on external interrupts, and internal timer to count to calculate the motor speed sent to the LED and display, an external circuit with a buzzer, or vulgar in speeding too low will stop motor, the buzzer sounds, the display does not appear, from a practical perspective, the evaluation of the important practical value of a standard system is the system of social life and the extent of the contribution of science and technology concepts.The design of a microcontroller as the core design of motor speed mersure and data display control system, requires speed range between 0-3000r/min DC Speed Control motor or AC variable speed motor to measure and display, speed display accuracy to achieve the speed of data digits, with high speed and low limit alarm. This design uses 6V DC motor. Hall sensor will generate a pulse signal input to the MCU external interrupt 0, SCM work work in the internal timer 0 count on the periodic signal, the formula to calculate speed calling, call display program in the LED on the main content MCU to complete some of the major motor speed measurement, LED display some of the major is to speed displayed, showing the range between 0-3000r/min.The main research design and measurement of DC motor control method, high efficiency, simple circuit, widely used also Bijiao, Velocimetry with Integrated Hall Sensor sensitivity rate signal, a frequency response of Kuai, the characteristics of strong anti-interference ability. Thus motor control accuracy and response speed, and energy conservation are all important.Key words: Direct current machine;SCM;Speed controlII目录摘要 (I)Abstract ........................................................................................................................ I I 第1章引言 .. (1)第2章系统功能分析 (3)2.1系统功能概述 (3)2.2系统要求及主要内容 (3)2.3系统技术指标 (3)第3章系统总体设计 (4)3.1硬件电路设计思路 (4)3.2软件设计思路 (4)第4章硬件电路设计 (6)4.1单片机的描述 (6)4.1.1 AT89C51引脚及作用 (6)4.1.2 ULN2003引脚图及功能 (9)4.2外围电路的设计 (10)4.2.1时钟电路 (10)4.2.2复位电路 (10)4.2.3测速电路 (11)4.2.4报警电路 (12)4.2.5显示电路 (13)4.2.6 74HC573引脚图及功能 (14)第5章软件电路设计 (16)第6章系统调试 (19)6.1硬件调试 (19)6.2软件调试 (20)6.3综合调试 (20)6.4故障分析与解决方案 (21)6.4.1故障出现情况 (21)6.4.2解决方案 (21)第7章结论 (23)III参考文献 (24)致谢 (25)附录I (26)附录II (27)IV第1章引言电子技术的高速发展,促使直流电机调速逐步从模拟化向数字化转变,特别是单片机技术的应用,使直流电机调速技术进入到一个新的阶段。
直流电动机具有良好的起动、制动性能,宜于在大范围内平滑调速,在许多需要调速或快速正反向的电力拖动领域中得到了广泛的应用。
从控制的角度来看,直流调速还是交流拖动系统的基础。
早期直流电动机的控制均以模拟电路为基础,采用运算放大器、非线性集成电路以及少量的数字电路组成,控制系统的硬件部分非常复杂,功能单一,而且系统非常不灵活、调试困难,阻碍了直流电动机控制技术的发展和应用范围的推广。
随着单片机技术的日新月异,使得许多控制功能及算法可以采用软件技术来完成,为直流电动机的控制提供了更大的灵活性,并使系统能达到更高的性能。
采用单片机构成控制系统,可以节约人力资源和降低系统成本,从而有效的提高工作效率。
在传统生产行业中,经常遇到各种需要测量转速的场合,例如发动机,电动机,机床主轴等旋转设备的运转和控制中,常需要分时或连续测量,显示其转速及瞬时转速。
在现代化工业生产过程中,为了实现各种生产工艺过程,需要各种各样的生产机械。
拖动各种生产机械运转,可以采用气动,液压传动和电力拖动。
由于电力拖动具有控制简单﹑调节性能好﹑耗损小﹑经济,能实现远距离控制和自动控制等一系列优点,因此大多数生产机械都采用电力拖动。
按照电动机的种类不同,电力拖动系统分为直流电力拖动系统和交流电力拖动系统两大类[1]。
纵观电力拖动的发展过程,交、直流两种拖动方式并存于各个生产领域。
在交流电出现以前,直流电力拖动是唯一的一种电力拖动方式,19世纪末期,由于研制出了经济实用的交流电动机,致使交流电力拖动在工业中得到了广泛的应用,但随着生产技术的发展,特别是精密机械加工与冶金工业生产过程的进步,对电力拖动在起动,制动,正反转以及调速精度与范围等静态特性和动态响应方面提出了新的,更高的要求。
由于交流电力拖动比直流电力拖动在技术上难以实现这些要求,所以20世纪以来,在可逆,可调速与高精度的拖动技术领域中,相当时期内几乎都是采用直流电力拖动,而交流电力拖动则主要用于恒转速系统。
直流电机作为执行机构被广泛地应用于各类控制系统中,其驱动与转速精1度是电机能够稳定工作的关键。
为此,我们提出了一种直流电机驱动与转速测量系统的设计方法,为直流电机制造、定型以及应用提供一些借鉴。
同时对电机驱动及其速度测量的研究,也我们系统掌握了电源驱动电路和速度测量电路的连接,以及其中用的到的诸如:LM317,8253,8051 等芯片的功能及其各个引脚的功能,同时通过用面包板搭建临时电路,加强了我们的动手能力,提高了我们解决实际问题的能力,充分的体现了理论与实践结合。