机器人羽毛球比赛行走装置设计本科毕业论文
一种打羽毛球机器人的结构设计
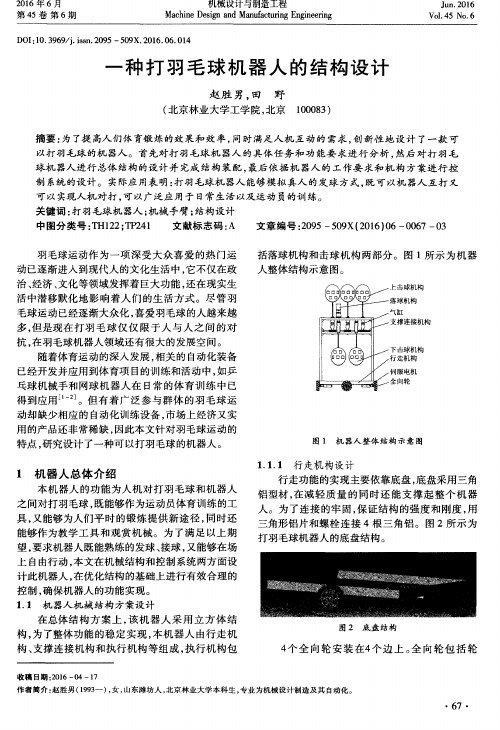
括 落球 机构 和击 球 机 构 两 部 分 。 图 1所 示 为 机 器 人 整体 结构 示意 图。
上击球机构 落球机构 气缸 支撑连接 机构
下击球机 构 行走机构 伺服 电机 全 向轮
图 1 机 器 人 整 体 结 构 示 意 图
1 机器人总体介绍
本机 器 人 的功 能 为 人机 对 打 羽 毛 球 和机 器 人 之 间对打 羽 毛球 ,既 能够作 为 运动 员体 育训 练 的工 具 ,又能够 为 人们 平 时 的锻 炼 提 供 新 途 径 ,同时 还 能够作 为 教学 工 具 和 观 赏 机 械 。为 了满 足 以上 期 望 ,要 求机 器 人既 能熟 练 的发 球 、接 球 ,又 能够在 场 上 自由行 动 ,本文 在 机械结 构 和控 制 系统两 方 面设 计此 机器 人 ,在优 化 结构 的基 础上 进行 有效 合理 的 控制 ,确保 机 器人 的功能 实现 。 1.1 机 器人机 械 结 构方 案设 计
随着 体育 运动 的深 入 发展 ,相关 的 自动化 装 备 已经 开发 并应 用到 体 育项 目的训练 和活 动 中 ,如 乒 乓球 机械 手 和 网球 机 器人 在 13常 的体 育 训 练 中 已 得 到 应用 ¨ 。但 有 着 广泛 参 与 群 体 的 羽 毛 球 运 动却 缺少 相应 的 自动 化训 练设 备 ,市场 上经 济又 实 用 的产 品还非 常稀 缺 ,因此 本文 针对 羽 毛球 运动 的 特 点 ,研究 设计 了一 种 可 以打 羽毛球 的机器 人 。
在 总体 结 构 方 案 上 ,该 机 器 人 采 用 立 方 体 结 构 ,为 了整体 功 能 的稳 定 实 现 ,本 机 器 人 由行 走 机 构 、支 撑连 接 机 构 和执 行 机 构 等组 成 ,执行 机 构 包
本科毕设步行机器人文献综述
本科生毕业设计(论文)文献综述设计(论文)题目步行机器人运动学分析作者所在系别机械工程系作者所在专业机械设计制造及其自动化作者所在班级B08111作者姓名郭建龙作者学号20084011132指导教师姓名韩书葵指导教师职称副教授完成时间2012 年 2 月北华航天工业学院教务处制说明1.根据学校《毕业设计(论文)工作暂行规定》,学生必须撰写毕业设计(论文)文献综述。
文献综述作为毕业设计(论文)答辩委员会对学生答辩资格审查的依据材料之一。
2.文献综述应在指导教师指导下,由学生在毕业设计(论文)工作前期内完成,由指导教师签署意见并经所在专业教研室审查。
3.文献综述各项内容要实事求是,文字表达要明确、严谨,语言通顺,外来语要同时用原文和中文表达。
第一次出现缩写词,须注出全称。
4.学生撰写文献综述,阅读的主要参考文献应在10篇以上(土建类专业文献篇数可酌减),其中外文资料应占一定比例。
本学科的基础和专业课教材一般不应列为参考资料。
5.文献综述的撰写格式按毕业设计(论文)撰写规范的要求,字数在2000字左右。
文献综述应与开题报告同时提交毕业设计(论文)文献综述Quadruped walking robotAbstract:The composition of the various parts of the walking robot is givena four-legged walking robot for complex terrain structure,analysis of the gait of the robot,given way to judge the stability of the robot in this form of gait.DH transform the kinematics of the robot forms of expression.The use of software for the simulation of the walking robot kinematics,robot joint exercise in the form in this form of gait,and laid the foundation for future robot control.Keywords: r obot kinematic analysis gait stability1 MDTWR双三足步行机器人图2 微型六足仿生机器人年哈尔滨工程大学的孟庆鑫、袁鹏等进行了两栖仿生机器蟹的研究,从两栖仿生机器蟹的方案设计到控制框架构建,研究了多足步行机的单足周期运动规律,合于两栖仿生机器蟹的单足运动路线规划方法,并从仿生学角度研究了周期性节律性图3 AMBLER 图4 DANTE-II美国罗克威尔公司在DARPA资助下,研制自主水下步行机所示。
羽毛球自动发球机毕业设计论文
摘要羽毛球运动是一项动作精细,技术复杂多变,对抗激烈的竞技项目。
当今世界羽毛球运动水准已发展到一个新的水准,它不仅要求运动员具有成熟的技术,灵活多变的战术,而且更需要良好的身体素质。
可见运动员的心、身、体的统一,是取得优异成绩的重要保证。
基于这点思想我设计了一种可供羽毛球运动员训练的羽毛球发球机,它主要由支撑系统、传动系统、发射系统及自动进料系统构成。
其中在发射系统中,采用电机压缩弹簧,利用弹力将羽毛球发射出去,自动进料系统则拟采用槽轮机构带动皮带轮间歇式的转动,从而将羽毛球送入发射管口。
本羽毛球发球机非常适合运动员及初学者使用,目前我国在这方面已取得了一点成就,但相比国外来说,我们国家在发球准确性及频率方面还相差甚远,因此需要更加完善。
关键词:羽毛球发球机发射自动进料槽轮间歇运动AbstractThe badminton movement is a movement fine, the technology is complex and changeable, resists the intense athletics project. Now the world badminton movement standard has developed to a new standard, it not only requests the athlete to have the mature technology, flexible tactic, moreover needs the good physical quality. Obviously athlete's heart, the body, the body unification, is obtains the excellent result the important guarantee. I planned based on this thought to design one kind to be possible to supply badminton serving machine which the badminton athlete trained,it mainly by strut system, transmission system, launching system and automatic feeding system constitution. In the launching system, uses the electrical machinery compression spring, launches using the tension the badminton, automatically feeds the system to plan to use the V-belt pulley organization impetus belt pulley intermittence -like rotation, thus sendsin the badminton the launch orifice. This badminton serving machine extremely suits the athlete and the beginner uses, at present our country has obtained an achievement in this aspect, but compares overseas said, our country is serving the accuracy and the frequency aspect is also far from, therefore the need is more perfect.Keywords:Badminton serving machine launch automatic feeding V-belt pulley intermittence目录第一章概述 (4)§1.1 目前国内外关于羽毛球发球机的研究现状和发展趋势 (4)§1.2 本课题的来源与现实意义 (4)第二章羽毛球自动发球机总体的介绍与研究基础 (6)§2.1 发球机总体的构造与布局 (6)§2.2 发球机的工作原理 (7)第三章传动系统的设计简介 (10)第四章发射系统的设计简介 (12)第五章自动进料系统的设计 (18)§5.1 选电动机型号 (18)§5.2 V带传动设计 (19)§5.3 齿轮结构设计 (20)§5.4 设计高速轴 (23)§5.5 设计低速轴 (27)§5.6 设计槽轮机构 (28)第六章自动进料系统的高速轴的可靠性分析 (31)参考文献 (35)结束语 (36)致谢 (37)第一章概述§1.1 目前国内外关于羽毛球发球机的研究现状和发展趋势随着我国体育事业的蓬勃发展,现在的体育训练器材已经多种多样,如排球抛球机、乒乓球发球机、足球发球机等都早已见于应用,但羽毛球发球装置却未出现,这与其本身的设计难度有关,首先其发球动作要求比较复杂, 为满足运动员的训练要求,发球机需要可发射定点球、高抛球、变速球等多种模拟现实比赛的球,其次还有羽毛球不像足球乒乓球那样为规则的球体, 羽毛部分容易受到损伤,这就给设计带来难度,由于以上原因使羽毛球发球机的要求很高,目前国内还没有专业人员进行类似的研究。
提高机器人竞走速度的研究毕业设计论文 精品
攀枝花学院本科毕业设计(论文)提高机器人竞走速度的研究学生姓名:冯进学生学号: 200810502013院(系):电气信息工程学院年级专业:2008级电气工程与自动化指导教师:范方灵副教授二〇一二年五月摘要目前人类正以惊人的速度走出工业文明,步入信息时代和新型技术时代。
新型技术时代的来临不仅改变着人们的生产和生活方式,而且改变着人们的思维和学习方式,这对教育提出了前所未有的挑战,也为教育的改革发展提供了千载难逢的机遇。
机器人是作为现代高新技术的重要象征和发展结果,已经广泛应用于国民生产的各领域,并正在给人类传统的生产模式带来革命性的变化,影响着人们生活的方方面。
虽然机器人的技术现在已日趋成熟,但是有关机器人的定义却众说纷纭,美国机器工业协会给出的定义是:“机器人是一种可再编程的多功能操作机,通过可变的程序流,以完成多样化的任务”。
我国著名的机器人专家蒋新松给出的定义则相对简洁:“机器人是一种具有拟人功能的机械电子装置”。
不管这些定义如何,但他们都包含了机器人的共性:①能模仿人的一些动作;②具有一定的智力、感觉和识别能力;③是人造的机器人机械电子装置。
关键词双足步行机器人,信息时代,高新技术,人工智能ABSTRACTHuman being out of the industrial civilization at breakneck speed, step into the information age and the new era of ing of the era of new technology is not only changing the way of production and way of life, and changing the way of thinking and learning styles, this unprecedented challenge to education, has provided a golden opportunity for education reform and developmentRobot is an important symbol of modern high-tech and development results have been widely used in various areas of national production, and are traditional modes of production brought about revolutionary changes to mankind, affecting people's lives.Although the robot technology has now matured, but define different opinions about the robot, United States machine industry association's definition is: "is a reprogrammable multipurpose manipulator robot, through procedures with a variable flow, to complete a variety of tasks".Definition of China's leading robot experts Jiang Xinsong is relatively simple: "robot is a mechanical and electronic device with humanoid features."Key words biped walking robot, information age, new technology,Artificial Intelligence目录摘要 (I)ABSTRACT (II)1绪论 (1)1.2 设计原理 (1)1.3 设计任务 (1)1.4 设计的意义 (1)2双足竞步机器人的优势 (3)2.1 双足机器人运动方式的优势 (3)2.2 生物工程、仿生工程学的研究意义 (3)2.3 双足机器人的触及的领域场合 (4)2.4 国内双足机器人目前的研究现况 (4)2.5 双足步行机器人研究的发展趋势 (5)3无线遥控原理 (6)3.1 发射电路原理 (6)3.2 接收电路原理 (6)4遥控方案设计 (7)4.1 系统设计 (7)4.2 解决方案(一) (7)4.3 解决方案(二) (8)4.4 方案讨论 (10)5红外传感设计 (11)5.1 红外传感的定义 (11)5.2 系统描述 (11)5.3 红外传感器原理 (11)5.4 方案讨论 (13)6 AS_VRobot软件仿真实现 (14)6.1AS_VRobot能力风暴虚拟机器人简介 (14)6.1.1 AS_VRobot软件安装 (14)6.1.2 AS_VRobot的服务器 (14)7代码编辑 (16)7.1 流程图编程 (16)7.2 C代码编程 (18)7.3 环境编辑 (23)7.4 机器人搭建 (26)7.5 仿真运行 (29)8系统测试 (31)8.1 无线发射接收测试 (31)8.2 程序测试 (32)8.3 系统总体测试 (32)8.4 测试结果 (32)8.5 测试结论 (32)结论 (33)参考文献 (34)附录1:仿真图 (35)附录2:遥控器电路 (37)附录3:接收部分电路图 (38)致谢 (40)1 绪论1.1 课题背景智能机器人技术是利用电子、信息(包括传感、人工智能、控制和计算)技术使机械柔性化和智能化的综合性技术,被宋健院士称为“当代最高意义上的自动化”。
毕业设计论文--机器人
煤矿救援机器人是一种能够在煤矿井下灾害环境遥控或自主导航工作的机器人,能代替煤矿的搜救队员深入井下,抢救矿难后被困矿工,并以这种方式减少甚至避免救护队员的伤亡。
同时在煤矿爆炸事故后的探测救援过程中,救护人员在井下高温环境下负重作业,其体力以及氧气消耗都很大。
救援机器人主要作用是代替救护人员搬运、转移伤员和遇难者至安全区域,而且救援机器人需要携带必要的救护设备和仪器,因此救援机器人应该具有足够大的尺寸和动力以及良好的续航能力。
首先,本文在满足上述要求的基础上,设计了煤矿救援机器人行走机构的机械部分。
在综合比较后选择轮式的行走机构。
同时考虑到救援机器人的特殊工作环境,通过链传动实现了各轮的同步移动,克服了轮式移动机构跨沟能力差及易打滑等缺点。
参照PACKBOT机器人增加摆臂,机器人伸出摆臂有利于越障。
其次,详细设计了煤矿救灾机器人控制系统的硬件电路,包括数据采集单元电路、运动控制单元电路、编码器解析单元电路等。
关键字:轮式;同步移动;摆臂;数据采集;运动控制Coal mine rescue robot is one kind of robots used in underground destroyed coal mine. It can rescue trapped miners in the underground instead of mine rescue team after mine disaster. It will avoid casualties of mine rescue team in this way. At the same time after the explosion and the rescue process of detection in the coal mine, mine rescue team in underground load operation under high temperature environment, and their physical as well as consumption of oxygen is huge. A major role in the coal mine rescue robot is to replace the mine rescue team to transport, and transfer the wounded and the victims to a safe area. Rescue robots had to carry the necessary equipment and apparatus, so the rescue robot should have sufficient size and power and good endurance capacity.First of all, on the basis of these requirements, I designed the mechanical parts of the coal rescue robot. In comparison, I choose the wheel body. At the same time, I take the special working environment for the coal mine rescue robot into account, so I try to achieve all-round mobile synchronization through the chain drive. And it can overcome the shortcomings of Wheeled Mobile institutions such as the cross-channel capabilities and easy to spin. In refer to PACKBOT robot, I design the arm for the robot, so it can across the barriers more easily.Secondly, hardware circuit of robot control system is designed in detail, such as data acquisition unit circuit, motion control unit circuit; encoder analyzing unit circuit and so on.Keyword:Wheeled;Sync mobile;Arm;Data Acquisition;Motion Control目录1绪论 (1)1.1 引言 (1)1.2 设计背景、意义 (1)1.2.1设计的背景和意义 (1)1.3 设计基础 (3)1.4 国内外研究与应用现状 (4)1.5 本章小结 (5)2行走机构方案确定 (6)2.1 煤矿灾害现场特征 (6)2.2 矿井灾害的非结构环境特征 (7)2.3 行走机构方案选择与确定 (7)2.3.1轮式机器人 (7)2.3.2 履带式机器人 (8)2.3.3 腿式机器人 (9)2.3.4 其它形式机器人 (9)2.4 行走方案的确定 (11)2.5 本章小结 (11)3机器人行走机构的机械设计 (13)3.1 机器人行走机构总体方案 (13)3.1.1 主传动系统设计 (14)3.1.2 摆臂方案设计 (14)3.2 机器人行走机构具体设计 (15)3.2.1 主传动系统的具体设计 (15)3.2.2 摆臂方案的具体设计 (38)3.3 本章小结 (42)4 电气系统的分析与设计 (43)4.1 数据采集单元电路 (43)4.1.1 A/D转换电路设计 (43)4.1.2 高速光耦电路设计 (45)4.1.3 串行通信电路设计 (46)4.1.4 单片机程序设计 (47)4.2 运动控制单元电路 (48)4.2.1 后轮电机驱动电路 (48)4.2.2 摆臂电机驱动电路 (49)4.2.3 串行通信电路设计 (50)4.2.4 单片机程序设计 (51)4.3 编码器解析单元电路 (55)4.3.1 电路设计 (55)4.3.2 单片机程序设计 (56)4.4 本章小结 (57)5 结论 (58)参考文献: (59)翻译部分: (61)英语原文 (61)中文翻译 (68)致谢............................................. 错误!未定义书签。
步行机器人 学位论文

第一章:安装步行机器人介绍步行机器人最新的产品构件无论它看起来是多么简单的,你将很快意识到这种需要两台伺服电机进行两足移动的步行机器人比两轮机器人(Boe-Bot)复杂的多,它通过机械运动和BASIC Stamp控制来实现步行机器人的行走。
实际上,步行机器人的搭建使用了许多的传感器作为反馈。
这其中包括有能观测一定距离内物体的红外线发射器及红外线检测器,还有用以观测红外线无法观测的物体的缓冲传感器(闪光脚趾),和一个用以测量倾斜参数的加速度计。
如果你耐心的调节步行机器人硬件和软件,步行机器人能完成所有滚动机器人能完成的动作。
步行机器人不仅比滚轮机器人有趣的多,而且你将发现通过学习BASIC Stamp芯片的进行编程,能更加熟练的掌握程序的编程。
通过步行机器人编程将会使你学会如何设计PBASIC程序,包括如何使用常量和变量、程序的指针以及存储数据的EEPROM(电可擦除的只读存储器)。
一个设计良好的程序标准是,能够在一些需要调整机械装置的场合中,不重新编写你的整个程序,只要通过简单的对程序进行修改就能实现你所要求的功能。
步行机器人的运动主要来自于两台伺服电机(这通常用于操纵飞机的螺旋桨)。
步行机器人两台伺服电机中,顶部的伺服电机控制双腿在机器人的重心位置两尺的范围内来回摆动,而底部的伺服电机用以机器人的前后行走。
步行机器人的腿和脚踝之间采用了一个简单的平行连接件,确保双脚平行的站在地面上。
两条腿都连接在同一个电机上,以实现一只脚向前,另一只则向后移动的行走动作。
单独的控制一个电动机,机器人能实现步行机器人的前进,后退,左转,右转等动作。
通过综合步行机器人的两台伺服电机的运动,就能实现更加协调,更加平稳的行走。
通过一个BASIC Stamp2微型控制器来控制步行机器人的伺服电机和传感器。
微控制器BASIC Stamp2是教学系统中运用很广的一种芯片,它提供了供步行机器人使用的大量的程序空间、存储空间,以及较快的处理速度。
毕业设计(论文)--管道机器人行走机构设计[管理资料]
![毕业设计(论文)--管道机器人行走机构设计[管理资料]](https://img.taocdn.com/s3/m/990d4cecfad6195f302ba6ee.png)
毕业设计(论文)--管道机器人行走机构设计摘要管道运输在我国运用比较普遍,管道长期处于压力大的恶劣环境中,受到水、油混合物、硫化氢等有害气体的腐蚀。
这些管道受蚀后,管壁变薄,容易产生裂缝,造成漏油的问题,存在重大安全生产隐患和济济损失。
因此研究工程应用中的管道机器人具有很高的实用价值和学术价值。
根据这些问题,我们设计一种新的行走机构并分析了其总体机械结构。
本文进一步介绍了当前国内外的管道机器人的发展现状并提出了一种新的管内行走机构。
它利用一个电机同时驱动均布在机架上并与管内壁用弹簧力相封闭的六个行进轮,从而实现了可以轴向直进全驱动的管内行走。
接着本论文重点对直进轮式管道机器人的运动机理和运动特征进行了分析和介绍。
根据管道机器人的设计要求选择电机,介绍了电机选择过程,对其中关键的机械部件如蜗轮蜗杆传动部件、齿轮等进行了设计。
该机器人具有较大的承载能力,可以在较高的速度下实现连续移动,由于该机构采用弹性装置支撑,所以该机构的管径适应性增大,是一种具有实用价值的移动机构形式……关键词:管道机器人;行走机构;弹性装置AbstractIn our country, pipeline transportation is very universal, and pipeline is in high pressure circumstance. Because pipes are corroded by the water, the oil mixture, the hydrogen sulfide, the noxious gas corrosion and so on. When these pipelines were corroded, their walls would become thin and result in cracks and oil leak, there is safety incipient fault in production and economic loss. So the key technology and further research development trend of in-pipe robot are discussed.According to these problems, we designed a new mobile mechanism and analyzed its machine structure. In this paper, the current states of in-pipe robot are described and a new type of mobile robot mechanism moving in pipe is presented. It uses two motor to drive six wheels which distribute symmetrically on the robot body and a wheels are pushed on the wall of pipe by spring force,so that the six driving wheels move along the axis of pipe. This kind of mobile robot mechanism has high efficiency,simple structure and easy to manufacture and to mount.Then the papers focus on direct pipeline into the wheeled robot's movement and the movement of an analysis and presentation. According to the pipeline robot design requirements choose Motors, introduced the motor selection process, of which the key mechanical components such as worm transmission parts, such as a gear design. The robot with the larger carrying capacity, can achieve higher speeds for mobile, as the agenciesadopt a flexible device support, the agency increased the diameter of adaptability, is a kind of practical value in the form of body movement.Keywords: In-pipe Robot; Mobile mechanism; Flexible device摘要IAbstract II1绪论 1128102管道机器人总体方案设计1111式 1112式 13173管道机器人的移动机构分析与设计181819动机构的原理19动机构的特点1921由度分析21度分析21析时的一些假设条件23构前进时的受力分析2427机的选择27位的设计计算29设计31选择31簧的设计3232径大小的影响32道机器人适用的管道口径334直进轮式管道机器人实体建模34343536375总结 38参考文献40致谢41附录421 绪论管道作为一种有效的物料输送手段,在一般工业、核设施、石油天然气、军事装备等领域中都得到广泛的应用,本题目要求设计一个结构紧凑的管道内行走装置,提高驱动效率。
本科毕业论文---四足步行机器人腿的机构设计(论文)设计
毕业设计(论文)四足步行机器人腿的机构设计学生姓名:学号:所在系部:专业班级:指导教师:日期:摘要本文介绍了国内外四足步行机器人的发展状况和三维制图软件SolidWorks的应用,着重分析了设计思想并对行走方式进行了设计并在此软件基础上四足步行机器人腿进行了绘制,对已绘制的零部件进行了装配和三维展示。
展示了SolidWorks强大的三维制图和分析功能。
同时结合模仿四足动物形态展示出了本次设计。
对设计的四足行走机器人腿进行了详细的分析与总结得出了该机构的优缺点。
本文对四足机器人腿的单腿结构分析比较详细,并结合三维进行理性的理解。
关键词:SolidWorks;足步行机器人腿AbstractIn this paper, fouth inside and outside the two-legged walking robot and the development of three-dimensional mapping of the application of SolidWorks software, focused on an analysis of design concepts and approach to the design of walking and the basis of this software quadruped walking robot legs have been drawn on components have been drawn to the assembly and three-dimensional display. SolidWorks demonstrated a strong three-dimensional mapping and analysis functions. At the same time, combined with four-legged animal patterns to imitate the design show. The design of four-legged walking robot legs to carry out a detailed analysis and arrive at a summary of the advantages and disadvantages of the institution. In this paper, four single-legged robot more detailed structural analysis, combined with a rational understanding of three-dimensional.Keywords:SolidWorks; four-legged walking robot目录摘要 (I)Abstract (II)1 绪论 (1)1.1 步行机器人的概述 (1)1.2 步行机器人研发现状 (1)1.3 存在的问题 (5)2 四足机器人腿的研究 (6)2.1 腿的对比分析 (6)2.1.1 开环关节连杆机构 (6)2.1.2 闭环平面四杆机构 (9)2.2 腿的设计 (11)2.2.1 腿的机构分析 (12)2.2.2 支撑与摆动组合协调控制器 (18)2.3 单条腿尺寸优化 (21)2.3.1 数学建模 (21)2.3.2 运动特征的分析 (23)2.4 机器人腿足端的轨迹和运动分析 (24)2.4.1 机器人腿足端的轨迹分析 (24)2.4.2 机器人腿足端的运动分析 (27)3 机体设计 (30)3.1 机体设计 (30)3.1.1 机体外壳设计 (30)3.1.2 传动系统设计 (31)3.2 利用Solid Works进行腿及整个机构辅助设计 (35)4 结论 (36)4.1 论文完成的主要工作 (36)4.2 总结 (36)参考文献 (37)致谢 (39)1绪论1.1 步行机器人的概述机器人相关的研发和应用现如今早已变成每个国家的重要科研项目之一,通过运用机器人来代替人们的某些危险工作或者帮助残疾人完成自己所不能完成的事情。
“羽众不同”自动化羽毛球机器人创新结构设计
“羽众不同”自动化羽毛球机器人创新结构设计摘要:随着社会的发展,机器人开始进入我们的视野,人们的生活逐渐丰富多彩,本文介绍的一种羽毛球机器人机构,该设备通过5G实现自动化陪同训练,且安全性高、劳动强度低。
主要零部件构成:电机,红外感应构成的检测装置,羽毛球机械臂等装置构成。
该机器人具有自动化,且安全性高、劳动强度低、专门针对人们日常生活锻炼的执行机构。
自动羽毛球机器人由机械臂,滑轮,转向机构等构成。
该机器人适用于家庭、训练馆、学校等,以及不适合现有的大型活动现场,本团队基于该社会现象,开发这一产品。
关键词:羽毛球机器人;机构;自动化引言自动化羽毛球机器人主要通过我国现有的5G技术为基础,在电机的作用下,通过安装在机器人身上的机械臂,以及红外遥感进行检测、识别以及码垛和传球工作。
红外传感可以对传球和打球过程中的羽毛球的坐标进行定位。
机械臂工作台的定位精度和速度平稳性是衡量机器人性能的重要指标,在设计中要格外注重提升机械臂和红外传感的反应识别速度和平稳度,提升对羽毛球传接的控制。
普通机器人发展水平是当前最能体现我国人民文化娱乐方式发展程度的指标,针对其的总体结构、原理、设计要点等方面展开论述。
1 自动化羽毛球机器人概述该机器人主要由机身、行走机构、捡球机构和码放装置组成,能够在各种羽毛球训练基地和训练场馆使用,自动捡拾羽毛球训练后场地中散落在地上的羽毛球,并且将其自动码垛收纳,大大提高运动员的训练效率。
羽毛球机器人由全向平移底座机构、支撑连接机构、击球机构、落球机构与驱动机构。
全向平移底座机构能够完成羽毛球机器人的迅速启动、停止、转弯、滑动等动作,是机器人运动系统的主要组成部分[1]。
羽毛球机器人主要依靠底盘进行运动,底盘即为全向平移底座机构。
底座材料主要采用三角铝型材料,具有质量轻、强度大的优势,在减轻机器人整体质量的同时,还提升了机器人的承重能力。
为了保障行走机构的连接稳定性、刚度与强度,采用三角形铝片与螺栓对接口进行连接[2]。
多足机器人行走机构设计(论文)

高职学生毕业设计题目:多足机器人行走机构设计学院: 机械自动化学院专业:学号:学生姓名:指导教师:日期:摘要本文旨在设计一种能够实现灵活、全方位运动的机器人的行走机构。
本文设计的多足步行机器人具有冗余驱动、运动拓扑的特点。
为实现其步行全方位机动性及作业多功能性,需要解决一系列的技术问题,而结构设计是其中的关键。
首先,对于国内外机器人的发展现状进行阐述和比较,并分析了多足机器人的研究趋势;接着,从机构自由度入手,明确设计思路,确定行走机构结构,对主要零件、构件进行设计,分析机构的受力情况,找出较危险的零件,并对其强度进行校核。
最后,初步研究了机器人的行动方式,拟定了简单的步态规划方案,规划了机器人直线行走步态、定点转弯步态。
关键词:多足机器人;机构自由度;行走机构;机构设计AbstractThis paper aims to design a travelling mechanism of a flexible and omnibearing motorial robot. The multiped walking robot referred to this paper has the characteristics of redandant drive and topological motion. In order to achieve its omnibearing walking mobility and working polyfunctionality, a series of technique questions need to resolved, of which the structural design is the key point.Firstly, the paper states the current situation of the robots development and compares the differences of the robots both domestic and overseas. Moreover ,it analyses the research trend of multiped robots. Secondly, it make clear of the designing ideas and confirm the travelling mechanism in terms of the structural variance,as well as designing the major parts and constuctional elements. Besides ,it analyses the stress state of the mechanism,trying to find out the rather dangerous parts and checking their intensity. Finally, it initially research the walking patterns of the robots and make out a simple tread program, which plans out the robot tread of linear walking and fixed point swerving.Keyword:Multiped robot;Degree of freedom;travelling mechanism;Mechanical design目录第一章绪论 (1)1.1 引言 (1)1.2国内外多足机器人发展概况 (1)1.3 多足机器人研究发展趋势 (3)第二章多足机器人行走机构的设计及校核 (5)2.1 多足机器人行走机构结构的拟定 (5)2.2 重要组件的设计及校核 (6)2.2.1 重要组件的选定 (6)2.2.2 圆柱凸轮的设计 (7)2.2.3 凸轮滚子轴的强度校核 (7)第三章其它部分设计 (9)3.1 电机和减速器的选用 (9)3.2 机器人步态初步规划 (9)设计总结 (11)参考文献 (12)致谢 (13)第一章绪论1.1 引言步行机器人是模仿动物的运动形式,采用腿式结构来完成多种移动功能的一类特种机起人。
四足步行机器人行走机构设计毕业设计

四足步行机器人行走机构设计毕业设计篇一:四足步行机器人腿的机构设计毕业论文毕业设计(论文)四足步行机器人腿的机构设计学生姓名:学号:所在系部:专业班级:指导教师:日期:摘要本文介绍了国内外四足步行机器人的发展状况和三维制图软件SolidWorks的应用,着重分析了设计思想并对行走方式进行了设计并在此软件基础上四足步行机器人腿进行了绘制,对已绘制的零部件进行了装配和三维展示。
展示了SolidWorks强大的三维制图和分析功能。
同时结合模仿四足动物形态展示出了本次设计。
对设计的四足行走机器人腿进行了详细的分析与总结得出了该机构的优缺点。
本文对四足机器人腿的单腿结构分析比较详细,并结合三维进行理性的理解。
关键词:SolidWorks;足步行机器人腿AbstractIn this paper, fouth inside and outside the two-legged walking robot and the development of three-dimensional mapping of the application of SolidWorks software, focused on an analysis of designconcepts and approach to the design of walking and (原文来自:小草范文网:四足步行机器人行走机构设计毕业设计)the basis of this software quadruped walking robot legs have been drawn on components have been drawn to the assembly and three-dimensional display. SolidWorks demonstrated a strong three-dimensional mapping and analysis functions. At the same time, combined with four-legged animal patterns to imitate the design show. The design of four-legged walking robot legs to carry out a detailed analysis and arrive at a summary of the advantages and disadvantages of the institution. In this paper, four single-legged robot more detailed structural analysis, combined with a rational understanding of three-dimensional.Keywords: SolidWorks; four-legged walking robot 目录摘要 ................................................ ................................................... . (I)Abstract .......................................... ................................................... (II)1 绪论 ................................................ ................................................... .. (1)1.1 步行机器人的概述 ................................................ .. (1)1.2 步行机器人研发现状 ................................................ . (1)1.3 存在的问题 ................................................ .. (5)2 四足机器人腿的研究 ................................................ .. (6)2.1 腿的对比分析 ................................................ . (6)2.1.1 开环关节连杆机构 ................................................ (6)2.1.2 闭环平面四杆机构 ................................................ . (9)2.2 腿的设计 ................................................ (11)2.2.1 腿的机构分析 ................................................ (12)2.2.2 支撑与摆动组合协调控制器 ................................................ . (18)2.3 单条腿尺寸优化 ................................................ . (21)2.3.1 数学建模 ................................................ .. (21)2.3.2 运动特征的分析 ................................................ .. (23)2.4 机器人腿足端的轨迹和运动分析 ................................................ . (24)2.4.1 机器人腿足端的轨迹分析 ................................................ .. (24)2.4.2 机器人腿足端的运动分析 ................................................ .. (27)3 机体设计................................................. ................................................... . (30)3.1 机体设计 ................................................ (30)3.1.1 机体外壳设计 ................................................ (30)3.1.2 传动系统设计 ................................................ (31)3.2 利用Solid Works进行腿及整个机构辅助设计 (35)4 结论 ................................................ ................................................... (36)4.1 论文完成的主要工作 ................................................ .. (36)4.2 总结 ................................................ ................................................... .. 36参考文献 ................................................ ................................................... .. (37)致谢 ................................................ ................................................... (39)1 绪论1.1 步行机器人的概述机器人相关的研发和应用现如今早已变成每个国家的重要科研项目之一,通过运用机器人来代替人们的某些危险工作或者帮助残疾人完成自己所不能完成的事情。
本科毕设步行机器人开题报告
本科生毕业设计(论文)开题报告论文(设计)题目步行机器人运动学分析作者所在系别机械工程系作者所在专业机械设计制造及其自动化作者所在班级B08111作者姓名郭建龙作者学号20084011132指导教师姓名韩书葵指导教师职称副教授完成时间2012 年 2 月北华航天工业学院教务处制毕业设计(论文)开题报告学生姓名郭建龙专业机械设计及自动化班级B08111指导教师姓名韩书葵职称副教授工作单位北华航天工业学院课题来源教师自拟课题课题性质应用设计课题名称步行机器人运动学分析本设计的科学依据(科学意义和应用前景,国内外研究概况,目前技术现状、水平和发展趋势等多足步行机器人是一种具有冗余驱动、多支链、时变拓扑运动机构, 是模仿多足动物运动形式的特种机器人, 是一种移动机构。
所谓多足一般指四足及四足其以上, 常见的多足步行机器人包括四足步行机器人、六足步行机器人、八足步行机器人等。
(1)国内研究概况雷静桃等对美国、日本等机器人研究大国及我国的多足步行机器人研究发展进行了综述,对多足步行机器人急需解决的问题进行了论述,并对未来可能的研究发展方向进行了展望。
曾桂英等提出了一种采用液压驱动的缩放式腿机构的结构设计, 并针对六足行走方式, 完成了液压驱动原理设计及PLC控制设计。
王刚等详细介绍了一种新型多足仿生机器人步行足的关节结构。
新型多足仿生机器人步行足关节采用谐波减速器作为传动部件, 其传动比大、可靠性高、结构紧凑, 特别适合应用于微小型机器人的关节设计中, 在一定程度上解决了以往传动方式传动效率低, 传动比小, 且没有自锁能力等问题。
采用新型多足仿生机器人步行足关节完成了3 个自由度的仿生机器人步行足和八足仿生机器人的设计, 验证了关节应用的可行性。
(2)国外研究概况1997年日本的本田公司和大阪大学联合推出了类人型机器人P3,它具有很好的动态步行运动,不仅可以走平路,而且可以爬坡。
P3通过它的重力、感应器和脚底的接触器把地面的状况送回电脑,电脑则根据地面的情况做出判断,进而平衡身体,稳定地爬行。
毕业设计(论文)-双足智能机器人的设计与实现模板
1 引言机器人是作为现代高新技术的重要象征和发展结果,已经广泛应用于国民生产的各个领域,并正在给人类传统的生产模式带来革命性的变化,影响着人们生活的方方面面。
对于步行机器人来说,它只需要模仿人在特殊情况下(平地或己知障碍物)完成步行动作,这个条件虽然可以使机器人的骨骼机构大大降低和简化,但也不是说这个系统就不复杂了,其步行动作一样是高度自动化的运动,需要控制机构进行复杂而巧妙地协调各个关节上的动作。
双足机器人的研究工作开始于上世纪60年代末,只有三十多年的历史,然而成绩斐然。
如今已成为机器人领域主要研究方向之一。
最早在1968年,英国的Mosher.R 试制了一台名为“Rig”的操纵型双足步行机器人[1],揭开了双足机器人研究的序幕。
该机器人只有踝和髋两个关节,操纵者靠力反馈感觉来保持机器人平衡。
1968~1969年间,南斯拉夫的M.Vukobratovic提出了一种重要的研究双足机器人的理论方法,并研制出全世界第一台真正的双足机器人。
双足机器人的研制成功,促进了康复机器人的研制。
随后,牛津大学的Witt等人也制造了一个双足步行机器人,当时他们的主要目的是为瘫痪者和下肢残疾者设计使用的辅助行走装置。
这款机器人在平地上走得很好,步速达0.23米/秒。
日本加藤一郎教授于1986年研制出WL-12型双足机器人。
该机器人通过躯体运动来补偿下肢的任意运动,在躯体的平衡作用下,实现了步行周期1.3秒,步幅30厘米的平地动态步行。
法国Poitiers大学力学实验室和国立信息与自动化研究所INRIA机构共同开发了一种具有15个自由度的双足步行机器人BIP2000,其目的是建立一整套具有适应未知条件行走的双足机器人系统。
它们采用分层递解控制结构,使双足机器人实现站立、行走、爬坡和上下楼梯等。
此外,英国、苏联、南斯拉夫、加拿大、意大利、德国、韩国等国家,许多学者在行走机器人方面也做出了许多工作。
国内双足机器人的研制工作起步较晚。
机械设计制造及自动化毕业论文-两足行走机器人行走控制部分设计

毕业设计(论文)作者: 1111 学号:05010213系部: 机械工程系专业: 机械工程及自动化题目: 两足行走机器人—行走控制部分设计指导者:路建萍刘艳评阅者:龚光容2009 年 6 月开题报告填写要求1.开题报告(含“文献综述”)作为毕业设计(论文)答辩委员会对学生答辩资格审查的依据材料之一。
此报告应在指导教师指导下,由学生在毕业设计(论文)工作前期内完成,经指导教师签署意见及所在专业审查后生效;2.开题报告内容必须用黑墨水笔工整书写或按教务处统一设计的电子文档标准格式(可从教务处网页上下载)打印,禁止打印在其它纸上后剪贴,完成后应及时交给指导教师签署意见;3.“文献综述”应按论文的格式成文,并直接书写(或打印)在本开题报告第一栏目内,学生写文献综述的参考文献应不少于15篇科技论文的信息量,一般一本参考书最多相当于三篇科技论文的信息量(不包括辞典、手册);4.有关年月日等日期的填写,应当按照国标GB/T 7408—94《数据元和交换格式、信息交换、日期和时间表示法》规定的要求,一律用阿拉伯数字书写。
如“2009年3月15日”或“2009-03-15”。
毕业设计(论文)开题报告1.结合毕业设计(论文)课题情况,根据所查阅的文献资料,每人撰写2000字左右的文献综述:文献综述摘要两足行走机器人是当前机器人研究领域最活跃的研究方向之一,引起了许多科研工作者的注意。
本文介绍了两足行走机器人与其他移动机器人相比的主要优点,对国内外两足行走机器人的研制工作做了综述,并对将来的研究方向和工作重点做出了展望。
关键词机器人智能控制两足行走1 两足行走机器人的一般情况两足机器人是模拟人类用两条腿走路的机器人[1]。
两足步行机器人适于在凸凹不平或有障碍的地面行走作业,比一般移动机器人灵活性强,机动性好。
1972年,日本早稻田大学研制出第一台功能较全的两足步行机器人。
美国、南斯拉夫等学者也研制出各种两足走行机器人模型。
大学毕业设计---履带式行走机器人
1 绪论1.1机器人发展概况在工业机器入问世30多年后的今天;机器人己被人们看作是一种生产工具。
在制造、装配及服务行业,机器入的应用取得了明显的进步。
由干传感器、控制、驱动及材料等领域的技术进步,通过智能机器人系统首次在制造领域以外的服务行业,开辟了机器人应用的新领域,让机器人作为“人的助手”,使人们的生活质量得以提高。
目前在许多领域己经进行了很大的努力来开发服务机器入系统,并力争在较大范围内使用它们。
这些机器人系统尽管有不同的应用领域,但它们所从事的工作仅限于维护保养、修理、运输、清洗、保安、救援及数据采集等方面。
机器人是一个通用的自动化装置。
国际标准化组织(1SO)的定义:“机器人是一种自动的、位置可控的、具有编程能力的多功能操作机,这种操作机具有几个轴,能够借助可编程操作来处理各种材料、零件、工具和专用装置,以执行各种任务”。
从1954年美国工程师乔治.大卫发表了《适用重复作业的通用性工业机器人》论文开始,到1962年美国联合控制公司推出第一台机器人“尤尼麦特”为止。
机器人开始在工业生产的各种场合中,起到了置关重要的作用。
而在所有的机器人研究中,尤使日本的机器人研究最为突出。
现在国外大多都在致力于直立行走机器人和微型机器人的研究。
特别是注重对于机器人控制和视觉识别方面的研究。
对于行走机器人而言,最引起大多数科学家注意的是对于视觉识别方面的研究。
并且也取得了许多可人的成果。
行走机器人分很多种,不仅有直立式,还有履带式,多支点式等等。
而这里只谈谈履带式行走机器人。
履带式行走机器人是一种利用履带进行支撑机器人机体的移动机器人目前我国发展了多履带式机器人,有四条和六条履带的移动机器人。
他们的优点是转向方便移动稳定的特点,所以适合在恶劣的条件下进行工作。
1.2 履带式行走机器人概述所谓履带式行走机器人(我们这里指的是普通的履带式行走机器人)利用两条履带进行支撑机体进行移动的机器人。
它具有运行稳定,转向灵活,能够越过较小的障碍,并且承载重量较大的特点。
毕业设计(论文)四足步行机器人设计说明书

毕业设计(论文)四足步行机器人设计说明书武汉理工大学毕业论文(设计)————————————————————————————————————————————摘要 ...................................... 4 1 绪论. (6)1.1综述 (6)1.2发展概况 (6)1.2.1国内发展概况 (7)1.2.2国外发展概况 (7)1.3课题背景 (8)1.4目的及意义 (8)1.5本文主要的研究工作 ................... 9 2 设计内容 (10)2.1理论依据 (10)2.2方案实施 (10)2.2.1方案比较: (12)2.2.2方案的选定 ..................... 12 3四杆机构的设计 (13)3.1基础理论知识 (13)3.1.1曲柄存在条件 (13)3.1.2急回运动特性和行程速比K (13)3.1.3压力角和传动角 (14)3.2轨迹设计 (15)3.3方案四杆机构的设计与计算 (16)3.3.1四杆尺寸 (16)武汉理工大学毕业论文(设计)————————————————————————————————————————————3.3.2最小传动角计算 (17)3.3.3步态分析 ....................... 18 4传动机构设计 (19)4.1传动方案及电机选择 (19)4.2同步带传动设计 (19)4.2.1确定计算功率 (19)4.2.2选择同步带型号 (20)4.2.3确定带轮齿数、和带轮节圆直径、 . 204.2.4验算带速 (20)4.2.5确定中心距和同步带节线长度及齿数 204.2.6作用在轴上的压力 ............... 21 5主轴组件设计 (22)5.1主轴组件的总体布置 (22)5.2主轴的结构设计 (22)5.2.1主轴的材料和热处理 (23)5.2.2初估轴径 (23)5.2.3轴的结构设计 (23)5.2.4轴的强度验算 ................... 25 6箱体设计 (27)6.1箱体材料的选择 (27)6.3箱体的加工 ......................... 28 7杆件布层 (30)武汉理工大学毕业论文(设计)————————————————————————————————————————————8操作与安装 .............................. 31 小结 ..................................... 32 致谢.................................... 34 参考文献 (35)武汉理工大学毕业论文(设计)————————————————————————————————————————————摘要在自然界或人类社会中,存在人类无法到达的地方和可能危及人类生命的特殊场合,如工地、防灾救援等许多领域,对这些复杂环境不断的探索和研究往往需要有机器人的介入。
行走机器人功能分析与调试 毕业设计
河北能源职业技术学院《行走机器人功能分析与调试》摘要:虽然机器人的研究、制作和使用已经有几十年的历史,但是双足直立行走的机器人世界上很少。
主要因为稳定性控制及双足行走控制非常复杂,但为了研究出与人更加接近的机器人,这是必须克服的难关。
主要是解决直立行走机器人腿部平衡的问题,包括硬件设计和软件的设计,侧重于对硬件的设计,即着重介绍直立行走机器人腿部平衡系统的相关知识、设计目的、设计思路、方案的确定、原理设计及分析、硬件调试。
行走机器人是最典型的机电一体化数字化装备,是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的智能机器人。
它代表了机器人的尖端技术,是当代科技的研究热点之一。
目前,国内双足机器人研究与世界先进水平相比还有较大差距,特别是在教学机器人方面的研究更是寥寥无几。
为改善这种局面,提高我国高校师生的综合技能,本论文在研制教学双足机器人方面进行了有益的尝试和大胆的实践,设计并制作出了一款适用于高校教学开发使用的小型双足行走机器人。
本文详细阐述了双足机器人机构设计和控制系统的研发过程,包括控制系统的硬件电路设计和制作,机器人双足的外形设计与加工,以及双足行走机器人的驱动和控制技术。
结合对人类行走步态的研究,规划了双足机器人行走的姿态及轨迹,推导了双足机器人稳定步行的条件,并据此进行了实物实验,实现了稳定的低速静态步行。
本论文重点讨论了静态步行的算法设计和仿真,详细分析了基于零力矩点的双足机器人动态步行运动规划方法,根据运动学约束条件计算出各个关节的运动轨迹。
使用Matlab软件,以ZMP点的轨迹作为约束条件,进行了前向离线规划试验和ZMP误差补偿试验,实验证明本文所采用的步态规划方法可以满足机器人连续稳定行走的要求。
教学双足机器人运动平稳,系统控制精度高,具有良好的教学功能和广阔的应用开发前景。
本文针对教学双足行走机器人方面进行了深入的研究,对他人今后进行教学双足机器人的研究提供了一套系统的研究方法,对同行具有借鉴和引导作用。
运动仿真毕业设计

东莞理工学院城市学院本科毕业设计毕业设计题目:“龙人宝贝”机器人的结构设计与控制学生姓名:孙浩学号: 200748051220 系别:机电工程系专业班级: 2007级机械设计制造及其自动化(2)班指导教师姓名及职称:王卫平(教授)、黎小巨(助教)起止时间: 2011年3月— 2011年 6月摘要本文所设计的机器人是以学校实验室中的“龙人宝贝”为参考而设计的。
内容是对基于单片机的机器人的结构设计与控制系统的设计,综合运用C51单片机,电子电路等知识进行智能移动机器人的控制系统设计以及研究。
本论文不仅注重理论知识的探讨,更注重于理论知识在实际中的应用。
本文详细介绍机器人的硬件机构以及软件的设计,同时利用传感器使机器人前行、智能壁障,并对其进行运动仿真。
关键词:机器人单片机控制系统运动仿真AbstractThis robot is designed for laboratories in schools, "Dragon Baby" as a reference and design. Content is the robot control system based on single chip design, the integrated use of C51 microcontroller, electronic circuits and other knowledge for intelligent mobile robot control system design and research. This thesis not only of theoretical knowledge-oriented, more focused on theoretical knowledge in practical application.This paper describes the robot hardware and software design of institutions. While taking advantage of the sensor to the robot forward, smart barrier, and its motion simulation.Key words: robot control system for motion simulation of single chip目录1、前言 (1)2、智能机器人研究的概况 (2)2.1智能机器人研究的目的和意义 (2)2.2智能机器人的研究现状与发展趋势 (3)2.3本课题的主要内容 (5)3、机器人的结构和外观设计 (5)3.1“龙人宝贝”机器人的介绍 (5)3.2“龙人宝贝”结构及参数 (5)3.3机器人结构与外观设计 (6)3.4三维建模 (6)3.5龙人机器人二维图 (10)4、机器人的控制与实现 (11)4.1硬件模块 (11)4.2软件模块 (15)4.3控制程序 (15)5、总结 (23)致谢 (24)参考文献 (25)附录 (26)“龙人宝贝”机器人的结构设计与控制孙浩1、前言机器人(Robot)是自动执行工作的机器装置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业论文机器人羽毛球比赛行走装置设计毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
3.附件包括:任务书、开题报告、外文译文、译文原文(复印件)。
4.文字、图表要求:1)文字通顺,语言流畅,书写字迹工整,打印字体及大小符合要求,无错别字,不准请他人代写2)工程设计类题目的图纸,要求部分用尺规绘制,部分用计算机绘制,所有图纸应符合国家技术标准规范。
图表整洁,布局合理,文字注释必须使用工程字书写,不准用徒手画3)毕业论文须用A4单面打印,论文50页以上的双面打印4)图表应绘制于无格子的页面上5)软件工程类课题应有程序清单,并提供电子文档5.装订顺序1)设计(论文)2)附件:按照任务书、开题报告、外文译文、译文原文(复印件)次序装订教研室(或答辩小组)及教学系意见机器人羽毛球比赛行走装置设计摘要随着科学技术的发展社会的发展,为移动机器人技术的研究越来越受到人们的重视和关注。
而双足机器人和轮式移动机器人相比较,轮式移动机器人的底盘在速度方面,运行平稳,利用范围,装载能力具有明显的优势,尤其是在服务机器人、巡检机器人、探测机器人等领域,轮式移动机器人的利用就更为普遍。
移动机器人能够持续,快速,准确的操作运行,离不开它具有良好的机械系统。
这种设计论文主要目的是对全方向轮式移动机器人行走机构的研究和分析,我们设计了一个可以适用于全向移动机器人羽毛球公开赛通用底盘,以及基于模块化,系列化的设计理念,形成的各种通用底盘的模型,以满足行走机器人羽毛球比赛设备的功能的需求。
这次毕业设计我所需要工作主要内容如下:(1)引进三轴轮式移动机器人在国内外研究现状和发展趋势,总结优势和轮式移动机器人的优缺点,以及移动机器人的关键技术领域。
其次,简要介绍了全向轮和常见类型的发展历程,总结了不同类型之间的结构特点,最终详细说明轮式移动机器人在各个领域的应用。
(2)概述全方位移动平台的常用轮系布局结构,比较轮式移动机器人底盘二轮布局和四轮布局各自的优缺点,并在此基础上建立通用底盘的动力学模型以及全方位轮的动力学模型。
(3) STM32主控芯片介绍(4) CAN总线的主要特点(5)设计合理的机械装置;(6)完成机器人羽毛球比赛行走装置设计。
关键词:轮式移动机器人,全向轮,通用底盘,羽毛球, STM32, CAN总线第1章绪论................................................................................................................错误!未定义书签。
1.1 机器人概述......................................................................................................错误!未定义书签。
1.2机器人的分类 (1)1.3 移动机器人研究现状及发展趋势..................................................................错误!未定义书签。
1.3.1 国外移动机器人研究现状及发展历史................................................错误!未定义书签。
1.3.2 国内移动机器人研究现状及发展历史................................................错误!未定义书签。
1.4.1 移动机器人的关键技术 (4)1.4.2 移动机器人控制技术 (4)1.5 课题意义与背景 (5)第2章轮式移动机器人的运动学分析 (5)2.1 底盘移动能力分析.........................................................................................错误!未定义书签。
2.2 三轴轮式底盘介绍..........................................................................................错误!未定义书签。
第3章硬件及单元电路设计.....................................................................................错误!未定义书签。
3.1 三轴轮式驱动底盘设计................................................................................错误!未定义书签。
3.2 STM32主控芯片介........................................................................................错误!未定义书签。
3.3 单片机在三轴轮式底盘行走的功能............................................................错误!未定义书签。
3.4 电机驱动电路设计........................................................................................错误!未定义书签。
3.5 CAN总线通信简介 (16)3.6稳压电路与稳压芯片简介 (17)第4章软件原理设计........................................................................................................错误!未定义书签。
4.1 AB相编码器原理.........................................................................................错误!未定义书签。
4.2 红外遥控的工作原理....................................................................................错误!未定义书签。
4.2.1 红外线的特性 (19)4.2.2 红外遥控的四个环节 (20)4.3 小车的状态....................................................................................................错误!未定义书签。
4.4 PID控制算法 (21)第5章系统调试.........................................................................................................错误!未定义书签。
5.1 调试环境介绍................................................................................................错误!未定义书签。
5.2 调试结果记录分析............................................................................................错误!未定义书签。
第1章绪论1.1机器人的概述及分类1.1.1机器人的概述(改过)机器人是一种机器装置,它可以自己执行工作任务。
它可以按照人们的思想来运作,又可以按照预定的程序来完成,也可以按照人工智能技术的原则来完成,研究机器人的工作任务主要是来帮助人们解决危险或者重复性的工作,让人们能够在某一方面得到放松。
机器人的概念和被大家了解的情况在国际上已经趋于统一,说明机器人越来越接近社会,然而这种机器是有着自身动力和控制能力的一种机器,它可以实现各种功能。
联合国标准化组织采用了美国机器人协会给机器人下的定义:“机器人是一种可编程和多功能的智能机器人,用来搬运材料、零件、工具的操作机;它是一种可以执行各种有差别的工作的专门系统,因为它可以改变并且可编程动作从而让它执行任务。
”而我国对机器人的定义是:“机器人是一种自动化的机器,所不同的是这种机器已经有些接近人或生物智能的能力,如肢体的感觉,运动能力和相互协作能力,规划能力,是一种高度灵敏的自动化机器“。