VAM系统平台调试
VAM系列电压电流表用户手册
V AM系列电压电流表用户手册2012-3-10V AM系列电压电流表是一款能够在进行电压、电流、功率、充电容量、时间等多种物理量测量的同时,可以设定参数实现过压保护、过流保护、过功率保护、过充电容量保护,限时保护以及欠压保护等多种保护功能于一体的强大的测量与控制仪表。
该仪表采用上下两组LED数码管同时显示被测数据,使用中可以进行灵活切换显示不同的物理量。
因此本仪表非常适合于需要对输出电压电流进行监控,以及为电池充电和放电等应用场合。
该系列电压电流表有10种可选型号,用户可以根据不同需要进行灵活选择,具体含义见下图:V AM4020:40V20A,不带保护 V AM9020:90V20A,不带保护V AM4010P:40V10A,带保护V AM7510P:75V10A,带保护V AM4020P:40V20A,带保护V AM7520P:75V20A,带保护V AM4050P:40V50A,带保护V AM9050P:90V50A,带保护V AM40100P:40V100A,带保护 V AM90100P:90V100A,带保护注:其中的红色部分型号是分体型的,带有一个扩展板,并且标配不配继电器,如果需要可以自行配备或在本部购买。
一、主要特点:电压电流双显示,同时也能切换显示功率、充电容量和时间末尾带P系列带有输出关断功能键,灵活开启或切断输出非常灵活的在线校准功能,用户可自行校准电压电流值4位LED数码管,3位有效显示精度具有过压,欠压、过流,过功率,过充电和超时等保护功能二、技术指标:1.输入电压范围(2线制): 5V~40V (4020,4050P,40100P)8V~40V (4010P,4020P)10V~75V (7510P,7520P)10V~90V (9020)输入电压范围(3线制,供电电压推荐使用12V或24V):0~75V (4010P ,4020P,7510P,7520P)0~90V (4020,9020,9050P,90100P)2.输出电流范围:0~10A (4010P,7510P)0~20A (4020,9020,4020P,7520P)3.电压电流显示方式:4位LED,3位数字 + 1位显示单位4.显示分辨率: 0.01V,0.01A,0.01W,0.01AH,0.01H5.电压精确度:±1%+2个字6.电流精确度:±2%+5个字7.测量速率: 5次/秒8.保护类型:OCP,OAH,OVP,OPP,OFT,LOP9.保护设定范围:过流保护OCP:0.01~上限过充电容量保护OAH: 0.01AH~999AH过压保护OVP: 0.01V~99.9V过功率保护OPP: 0.01W~9.99kW(P表示W P.表示kW)超时保护OFT:0.01小时~99.9小时10.外形尺寸(mm): 79(长)*43(宽)*25(厚)11.安装孔开孔(mm):76.5*39.2注释:1.一体机型的3线制接线方法如下图:2.分体机型的接线方法:三、仪表结构:四、使用说明:本仪表功能实用,使用方便,下面前4条是基本使用方法,第5条是调试模式介绍。
威玛网电网线单元系统操作说明

一、网线可视单元梯口主机(围墙机)梯口机参数:1、摄像头:1/3 APS/600 TV线/0.1Lux/1VPP-75R2、工作电压:18V/2A3、工作温度:-40℃…+70℃4、线材:超五类网线(GB)呼叫说明:1、呼叫用户分机:输入三位或四位房号,再按“#”键确认,可呼叫相应的用户分机。
2、呼叫管理主机:单元主机输入“0000”,按“#”键确认,可呼叫管理机。
主机系统设置1、地址编号设置输入管理员密码序号“**00”按“#”键,然后再输入管理员密码“1067”按“#”键确认。
显示“H-00”,输入“1”按“#”键,再输入需要设置的本机地址编号(二位数),比如:01,02,03,04 号主机。
(备注:一个单元多个门口机时才设置)2、开锁时间设置输入管理员密码序号“**00”按“#”键,然后再输入管理员密码“1067”按“#”键确认。
显示“H-00”,输入“3”按“#”键,显示“L-”;输入两位开锁等待时间,如设置:1秒钟,请输入“01”。
开锁等待有效时间范围为“01秒钟-60秒钟”,按“#”确认,显示“SAUE”的同时又显示“H-00”;表示设置成功,按“*”键退出操作。
3、开锁密码设置输入管理员密码序号“**00”按“#”键,然后再输入管理员密码“1067”按“#”键确认。
显示“H-00”,输入“9”按“#”键,显示“E”;输入三位密码序号,如:“001”。
密码序号有效范围为“000-255”,按“#”键确认,显示“- - - -”,输入任意四位数作为密码;按“#”键确认。
4、增加ID卡操作入管理员密码序号“**00”按“#”键,然后再输入管理员密码“1067”按“#”键确认。
显示“H-00”,输入“11”按“#”键,新的卡片在刷卡区刷一次,可连续操作,完成增加后,按“*”键退出5、删除ID卡操作码序号“**00”按“#”键,然后再输入管理员密码“1067”或之前设置的管理员密码,按“#”键确认。
西屋默纳克3000一体机系统调试基本流程
西屋默纳克3000一体机系统调试基本流程西屋默纳克3000一体机系统调试基本流程一.慢车调试1. 主电源,制动电阻,编码器线(穿入铁管并与动力线分开走线)制动器电源,2. 制动器反馈接线正确3. 上下减速,上下限位信号准确,短接上下限位信号(+24V-SLUX)(+24V-SLDX)或者将上下限位开关安装到位4. 确保安全回路中各安全开关复位,如部分安全开关无法复位可短接部分安全回路开关,从K:101短接到K:103和K:104短接到K105,即除控制柜急停与轿顶急停起作用外其他安全开关全部短接。
但有时会出现安全接触器动作但主板上X22安全反馈信号未收到,则按照原理图逐个排查从K101到X22点的各元件触点(包括对地短路保护器,相序继电器,安全接触器触点,无机房还需检查UPS应急电源的输入输出电缆是否接上,如未安装可短接插座KD1:和KD10)5. 确保厅门轿门门锁通路,现场无法满足条件的话可通过短接K:105与K:108和K:107短接厅门轿门。
6. 确保主板输入点X17的检修信号正确,可短接+24到JX,或将轿顶检修手柄插件插入轿顶接线板的CIB插件内。
7. 确保:8. F0-00=1,9. F0-01=1,10. F0-03=1.75,(可改变实际运行速度)11. F0-04=1.75,12. F0-05=1t13. 该三个参数根据现场电梯的梯速与载重量设定,F1组电机参数根据电机铭牌参数设定,(特别注意F1-06编码器原点角度与F1-08接线方式,贴于主机铭牌附近,手动更改F1-06和F1-08时必须将F0-00的控制方式改为0才能进行修改,修改完成后F0-01必须改回1,但此时需断电重启后才能修改)如果F1-06编码器原点角度不对则需要进行主机编码器原点角度自学习,自学习分两种,带载荷自学习和空载完整自学习(注:适用于同步电机)。
14. 确保FF-01()额定功率参数的正确:FF参数的进入密码是:0143013:7.5KW14:11KW15:15KW16:18.5KW17:22KW18:30KW带载自学习:将F1-11改为1,操作器上出现TURN指示时,将F8-02改为0,按住上行或者下行此时电机将运转(注:打开抱闸时电机会发出“嘟”的声音)待电机自己停止,查看F1-06,F1-08参数并记录,重复此操作三次,对比F1-06参数三次学出的数值,如误差不大说明自学习成功。
数控机床的工作平台调试和校准方法

数控机床的工作平台调试和校准方法数控机床是一种高精度、高效率的机械设备,广泛应用于各个行业中。
在数控机床的生产过程中,工作平台的调试和校准是非常重要的环节,只有正确进行调试和校准,才能保证数控机床正常工作,完成精密加工任务。
本文将介绍数控机床工作平台调试和校准的方法。
首先,在进行数控机床工作平台调试之前,我们需要对工作平台进行全面的检查。
首先,检查工作平台的运动装置,包括导轨、滑块、丝杆等部件,是否存在松动、磨损等情况。
其次,检查数控机床的液压系统、电气系统等关键部件,确保其正常运转。
最后,检查数控机床的润滑系统,确保润滑油的供应充足,以防止摩擦磨损。
接下来,我们将介绍数控机床工作平台的调试方法。
首先,确定数控机床的工作原点和坐标系。
数控机床的工作原点是指机床运动的参考点,而坐标系则是指定一个数控机床运动的基准点和基准方向。
在调试过程中,我们需要根据零件的设计要求和机床的几何结构,确定工作原点和坐标系。
其次,在调试过程中,我们需要精确地调节数控机床各轴的运动参数。
这些参数包括步进或伺服电机的脉冲当量、定位精度、加速度、速度等。
通过精确调节这些参数,可以确保数控机床的运动精度和加工效率。
在进行数控机床工作平台的校准之前,我们需要进行误差检测。
误差检测是通过测量数控机床加工所得工件的实际尺寸与理论尺寸之间的差别来确定数控机床的误差状况。
常见的误差检测方法包括直线度检测、平行度检测、垂直度检测等。
通过误差检测,我们可以了解数控机床的加工精度情况,从而做出相应的校准。
最后,我们将介绍数控机床工作平台的校准方法。
校准是根据误差检测结果对数控机床进行微调或更正,以提高机床的加工精度。
通常,校准分为机械校准和补偿校准两种。
机械校准主要包括轴线调整和机床几何误差调整。
轴线调整是通过调试轴线的垂直度、平行度、偏斜度等来改善数控机床的运动精度。
机床几何误差调整是通过调整和修正数控机床的几何结构,来消除机床的几何误差。
D数控系统调试步骤
D数控系统调试步骤数控系统调试是指在数控机床安装与电气连接完成之后,对数控系统进行测试、校准以及优化,确保数控机床正常运行的过程。
下面将介绍数控系统调试的主要步骤。
1.电气连接检查在进行数控系统调试之前,首先需要检查数控系统与数控机床之间的电气连接情况。
包括检查各个电气元器件的连接是否紧固,电气元器件的接线是否正确等。
2.电源及开关检查检查数控系统的电源是否正常接通,各个开关是否处于正常状态。
确保数控系统的供电正常,各个开关处于正确的工作状态。
3.机床坐标系设定根据机床的结构特点,确定机床的坐标系。
通常情况下,数控机床具有三个直角坐标轴X、Y、Z,可以通过调整数控系统的参数来设定机床的坐标系。
4.伺服轴调试数控系统中的伺服轴是负责执行运动指令的关键元器件。
调试时需要逐一检查伺服轴的位置与速度反馈功能是否正常,包括位置传感器、编码器、驱动器等。
5.数控系统参数调试根据数控机床的实际情况,调整数控系统的相关参数,以满足机床的运动精度要求。
包括速度加速度的设置、伺服轴的反馈增益调整、误差补偿等。
6.机床轴线运动测试在进行数控系统调试的过程中,需要对机床的各个轴线进行运动测试。
通过对各个轴线进行正反向运动、快慢移动、圆弧插补等测试,确保机床运动的平稳性、精确性。
7.编程及操作界面调试数控系统的编程及操作界面是操作数控机床的重要环节。
在调试过程中,需要测试数控系统的编程功能、操作界面的操作性能,确保用户可以顺利地进行编程和操作。
8.自动加工测试在完成了上述步骤之后,可以进行自动加工测试。
通过编写简单的加工程序,在数控机床上进行自动加工,测试数控系统的稳定性、精度以及加工效果。
9.故障排除及优化在调试过程中,可能会出现故障或不理想的情况。
这时需要根据实际情况进行故障排除,并对数控系统进行进一步的优化。
可以通过调整参数、更换元器件等方式来解决问题,以提高数控机床的运行性能。
10.确认调试结果调试完成后,需要对数控机床进行全面的检查,确保调试结果符合要求。
数控机床程序调试的常用方法与技巧
数控机床程序调试的常用方法与技巧数控机床是现代制造业中不可或缺的设备,它能够精确地加工各种复杂形状的零件。
数控机床程序调试是确保机床正常工作以及保证产品质量的关键步骤。
本文将介绍数控机床程序调试的常用方法与技巧,以帮助读者更好地理解和掌握这一领域的知识。
首先,在进行数控机床程序调试之前,我们需要了解几个关键概念。
数控机床程序调试是指将设计好的数控机床程序加载到机床的控制系统中,并对程序的各项参数进行调整和优化,以确保机床能够按照预期的方式工作。
调试的目标是尽可能地减少加工过程中的误差和瑕疵,提高产品的质量和生产效率。
第一种常用的调试方法是逐步调试。
这种方法的核心思想是从简单的程序开始,逐步增加程序的复杂性和工艺要求,以便更好地检测和解决问题。
在逐步调试的过程中,我们需要注意以下几个方面。
首先,要确保每一步调试都有合适的备用工具和备件。
这些备用工具和备件可以帮助我们在出现问题时进行更快速和准确的修改和调整。
其次,要充分利用数控机床的模拟功能。
模拟功能是数控机床调试过程中非常重要的一环,它可以让我们在实际加工之前对程序进行虚拟加工和检测,从而减少出错的风险。
第二种常用的调试方法是反复试验。
这种方法的核心思想是通过多次试验和反馈,不断优化和改进程序。
在进行反复试验的过程中,我们需要注意以下几个方面。
首先,要充分利用数据采集与分析的技术。
通过对实际加工过程中的数据进行采集和分析,我们可以识别出潜在的问题和改进的空间,并对程序进行相应的调整和优化。
其次,要注重交流和合作。
数控机床程序调试往往需要跨学科的合作和交流。
与机床操作员、程序设计师和设备厂商等进行及时有效的沟通和合作,可以帮助我们更好地解决问题和改进程序。
第三种常用的调试方法是利用专业软件和工具。
随着信息技术的发展,现代数控机床调试中出现了许多专业软件和工具,可以帮助我们更快速、准确地进行程序调试。
在使用这些软件和工具时,我们需要注意以下几个方面。
整理VAV系统调试方案

文件编号: E3-C2-DD -AE -12整理人 尼克VAV 系统调试方案变风量(VAV)系统空调调试工法1 前言变风量(VAV)空调系统是一种通过改变送风量来调节室内温湿度的空调系统。
变风量空调系统60年代起源于美国,自80年代开始在欧美、日本等国得到迅速发展,最重要的原因是变风量空调系统巨大的节能优势。
而在我国,随着国民经济的快速发展,人们的生活品质正在逐步提高,对室内的空气环境的要求也越来越高。
为了满足人们的需要,建筑物空调系统正在快速的普及和发展。
与此同时,建筑物的能耗也越来起大。
然而全球气候变暖,因此,在满足人们需要的同时,必须利用现代先进的自动控制系统,大力开发节能型空调系统。
应对于新型空调系统,采用新型的检测调试方法。
为了不影响工程交工验收和数据的准确性,总结了个别工程的经验,为我公司的变风量(VAV)系统的检测调试提供依据。
特编制本工法。
2 工法特点变风量空调系统由空调机组和末端装置(VAV BOX)组成,末端装置(VAV BOX)箱安装于吊顶内,与末端风口采用带强度的保温软管进行连接。
一般VAV BOX均带2-5个风口,风量的调节全部在吊顶内完成,因此检测时,需要其它专业施工到位,方能编制检测调试方案以及平衡调整。
3 适用范围本工法适用于负荷变化较大的建筑物,如:办公大楼,多区域控制的建筑物以及公用回风通道建筑物。
3.1 负荷变化较大的建筑物由于变风量可以减少送风机和供冷、暖的能量(因为可利用灯光及人员等热量),故负荷变化较大的建筑物可以采用变风量系统。
若建筑物的玻璃窗面积比例小,外墙传热系数小,室外气候对室内影响较小,则不适合采用变风量系统。
因为部分气候时的负荷能量较小。
例如办公大楼,一旦建筑物内有人员聚集和灯光关闭开启,负荷就接近尖峰;人员离开和灯光关闭负荷就变小,因此负荷变化较大。
3.2 多区域控制的建筑物多区瑾控制的建筑物适合采用变风量系统,因此变风量系统在设备安装上比较灵活,因此用于多区域时,比一般传统的系统更为经济节能。
立式数控加工中心的数控系统的调试和操作技巧

立式数控加工中心的数控系统的调试和操作技巧随着现代制造技术的发展,立式数控加工中心在机械加工领域得到了广泛应用。
作为立式数控加工中心的核心部件,数控系统的调试和操作技巧对于提高加工效率和质量至关重要。
本文将介绍立式数控加工中心数控系统的调试和操作技巧,以帮助工程师和操作人员更好地实现加工任务。
一、数控系统的调试技巧1. 确保硬件连接正确:在调试数控系统之前,首先确保所有硬件设备如电机、传感器和控制器之间的连接是正确可靠的。
任何连接问题都可能导致系统无法正常工作。
2. 检查参数设置:数控系统通常具有大量的参数设置,包括速度、加速度、位置等。
在调试过程中,请确保这些参数的设置符合实际加工需求,并及时进行修正和优化。
3. 检测传感器和开关:数控系统依赖于传感器和开关来感知加工状态和位置信息。
在调试过程中,请确保传感器和开关正常工作,并及时更换故障组件。
4. 校准坐标系:数控系统的坐标系通常是基于机床的。
在调试过程中,请确保坐标系的校准准确,以保证加工精度和定位精度。
5. 测试运动和定位:在进行加工任务之前,请测试机床的各个轴的运动情况和定位精度。
如果发现问题,及时调整参数和修复设备,以确保稳定的运动和准确的定位。
二、数控系统的操作技巧1. 熟悉操作界面:不同的厂家和型号的数控系统有不同的操作界面。
在正式操作之前,请熟悉并掌握数控系统的操作界面,包括各个按钮、菜单和功能键的作用。
2. 设置工艺参数:在进行加工任务之前,请根据加工要求设置相应的工艺参数,如切削速度、刀具尺寸、进给速度等。
这些参数的设置将直接影响加工效果和质量。
3. 编写加工程序:数控系统通常需要根据加工任务编写相应的加工程序。
在编写程序时,请确保程序的正确性和完整性,并进行程序的调试和测试。
同时,建立程序库以便日后使用和维护。
4. 定位与对刀:数控机床的操作任务包括定位工件和对刀。
在进行定位和对刀操作时,请注意技巧和规范,确保工件在正确的位置上,并正确设置切削刀具的参数。
虚拟现实设备的常见设置和调试方法

虚拟现实设备的常见设置和调试方法虚拟现实(Virtual Reality,VR)技术作为一种全新的交互体验方式,已经在多个领域得到广泛应用。
随着技术的进步和普及,越来越多的人开始享受到虚拟现实带来的身临其境的感觉。
然而,对于初次接触虚拟现实设备的用户来说,设置和调试设备可能会带来一些挑战。
本文将介绍虚拟现实设备的常见设置和调试方法,帮助读者更好地享受虚拟现实的乐趣。
1.设备选购和配对在购买虚拟现实设备之前,需要先了解自己的需求并选择合适的设备。
市面上有各种不同类型的虚拟现实设备,如头戴式显示器(Head-Mounted Display,HMD)、手柄控制器、追踪器等。
根据个人需求选择适合的设备,并确保设备与所使用的电脑或游戏主机兼容。
另外,设备之间也需要进行配对设置,以确保它们能够正常通信。
2.系统要求和连接设置虚拟现实设备通常需要一台高性能的电脑或游戏主机来支持。
在连接虚拟现实设备之前,首先需要确保电脑或游戏主机符合设备的系统要求。
这包括操作系统版本、图形处理能力、内存和存储等方面的要求。
如果不满足要求,可能会影响设备的性能。
在连接设备时,通常需要使用设备附带的连接线或无线连接方式。
确保连接线的质量良好,并确保连接的牢固。
如果使用无线连接方式,需要让设备和电脑或游戏主机处于相同的无线网络下,以确保通信畅通。
3.安装和更新软件虚拟现实设备通常需要安装相应的软件驱动程序或应用程序。
在连接设备后,按照设备的使用说明,下载并安装所需的软件。
这些软件通常用于设备的驱动、图形渲染和游戏或应用的管理。
另外,还需要时常检查软件是否有更新。
许多设备制造商会定期发布软件更新,以提高设备的性能和稳定性。
定期检查软件更新,可以确保设备始终以最佳状态运行。
4.传感器校准和调试虚拟现实设备的核心是传感器技术,它们可以追踪用户的头部和手部动作,并将其转化为虚拟世界中的动作。
因此,在使用设备之前,通常需要进行传感器的校准和调试,以确保准确追踪用户的动作。
自动化设备的调试方法及系统
自动化设备的调试方法及系统一、引言自动化设备的调试是确保设备正常运行的关键步骤。
本文将介绍自动化设备调试的方法和系统,以确保设备能够高效、稳定地工作。
二、调试方法1. 设备检查在开始调试之前,首先要进行设备检查。
检查设备的外观是否完好,各部件是否安装正确,电源是否连接稳定等。
确保设备没有任何损坏或者故障。
2. 确定调试步骤根据设备的功能和工作流程,确定调试步骤。
将设备分为各个模块,并按照模块的先后顺序进行调试。
确保每一个模块的调试都是独立的,不会相互干扰。
3. 参数设置根据设备的要求和工作流程,设置相关参数。
包括但不限于速度、温度、压力等。
确保参数设置合理,并符合设备的工作要求。
4. 功能测试进行设备的功能测试,包括各个模块的功能测试和整体功能测试。
通过对设备的各个功能进行测试,确保设备能够正常工作,并满足设计要求。
5. 故障排除在调试过程中,如果发现设备有故障或者异常情况,需要及时进行故障排除。
采用逐步排查的方法,找出故障原因,并进行修复。
6. 数据记录在调试过程中,需要记录相关数据。
包括设备的运行情况、参数设置、故障情况等。
通过数据记录,可以更好地分析设备的运行状况,为后续的调试提供参考。
三、调试系统1. 调试工具为了更好地进行设备的调试,可以使用一些调试工具。
例如,示波器、万用表、温度计等。
这些工具可以匡助我们更准确地检测设备的工作状态和参数设置。
2. 远程监控系统对于一些大型设备或者需要长期运行的设备,可以使用远程监控系统。
通过远程监控系统,可以实时监测设备的运行状态,及时发现并解决问题。
3. 数据分析系统在设备调试过程中,可以使用数据分析系统对设备的运行数据进行分析。
通过对数据的分析,可以发现设备的潜在问题,并提出相应的解决方案。
4. 自动化控制系统对于一些需要高度自动化的设备,可以使用自动化控制系统。
通过自动化控制系统,可以实现设备的自动调试和自动运行,提高工作效率和稳定性。
四、结论自动化设备的调试是确保设备正常运行的重要步骤。
自动化设备的调试方法及系统
自动化设备的调试方法及系统引言概述:自动化设备在现代工业生产中起着重要的作用,它能够提高生产效率和质量,并减少人力成本。
然而,自动化设备的调试是确保其正常运行的关键步骤。
本文将介绍自动化设备调试的方法和系统,以帮助读者更好地了解和应用。
一、调试前的准备工作1.1 设定调试目标:在开始调试之前,首先要明确设定调试目标。
这可以包括设备的功能测试、性能验证以及系统的稳定性检查等。
1.2 确定调试流程:根据设备的特点和功能,制定详细的调试流程。
这可以包括设备的硬件和软件调试、设备的通信和控制模块的调试等。
1.3 准备调试工具:准备必要的调试工具,如万用表、示波器、逻辑分析仪等。
同时,确保调试环境的安全和稳定,以避免对设备造成损坏。
二、硬件调试2.1 检查电源和接线:确保设备的电源供应正常,并检查各个接线的连接是否牢固。
同时,检查设备的电源电压和电流是否符合要求。
2.2 测试传感器和执行器:通过使用合适的测试仪器,对设备中的传感器和执行器进行测试。
这可以包括检测传感器的灵敏度和准确性,以及执行器的动作是否正常。
2.3 校准设备参数:根据设备的要求,对各个参数进行校准。
这可以包括设备的速度、位置、力度等参数的校准,以确保设备的运行精度和稳定性。
三、软件调试3.1 检查程序逻辑:通过对设备的软件程序进行逻辑检查,确保程序的正确性和完整性。
这可以包括检查程序的流程、条件判断和循环等。
3.2 调试通信模块:对设备的通信模块进行调试,确保设备与其他设备或系统的正常通信。
这可以包括测试设备的通信速率、通信协议和数据传输的稳定性。
3.3 优化控制算法:对设备的控制算法进行优化,以提高设备的控制精度和响应速度。
这可以包括调整控制参数、改进控制策略等。
四、系统调试4.1 整体功能测试:对整个自动化系统进行功能测试,确保各个部分的协调运行。
这可以包括测试设备的启动、停止、暂停等功能。
4.2 性能验证:通过对设备的性能进行验证,评估设备的运行效果。
VAV系统安装与调试方案
VAV系统安装与调试方案1.1.1 VAV系统安装A.VAV安装难点●要实现其预期的功能,达到预期的效果,涉及到诸多专业,包括:机械设备、电气、控制等,作为安装阶段,需要重点关注以下方面:●各设备安装牢固、平稳,包括空调器、VAV-BOX。
●现场组装的部件要符合产品厂商的要求,使转动部件的转动灵活,固定部件牢固。
●到场检验也很重要。
●VAV-BOX的前后进出风口要有厂商要求的直管段。
●传感器、控制系统等安装,与BA的配合。
B.应对措施●设备到场要及时检验,并做好记录。
●设备安装要负荷厂商要求,做好安装复核记录。
不符合要求的及时调整。
●散装部件完成组装后要进行检验、试验,不合格的及时调整或更换。
●参数的设定要准确、精确。
是经过计算得来得,并在实践中验证。
不合理的要及时修正。
●与BA提前沟通,做好协作合理安排。
VAV空调系统安装A.风管系统安装风量系统从风机到各个末端装置的送风系统,一般采用中速中压送风系统,因此对风管就要求强度较大,密封性能好,以防止渗漏及风速较高时振动产生的噪声。
支风管一般采用可耐压的圆形风管,将主风管连接到末端装置。
VAV末端安装●VAV空调箱的一次风阀是圆形蝶阀,阀体外框采用镀锌铁皮制作,外框上必须有加固筋以增加其结构强度,其轴上配带一个可以从装置外部看到风阀位置的显示器,该轴在无需维护的尼龙轴承中作无噪声转动,风阀驱动器安装在装置外部以便于维修,组装好的风阀带有内部的机械档位,以保证阀板可以达到最大并关闭的位置,风阀应有密封垫以保证其漏风量最小,不应该用粘接剂密封。
●一次风阀上包括有一个阀板风向上流的差压式传感器,传感器的两根轴承穿插在圆形的阀体上,其上的检测点不得低于十二个,每一点的检测值均送至同一截面的中心,以保证测定的准确性,传感器能够测定平均压力值,并把这些压力的平均值送到控制设备上。
传感器等由BMS安装。
●为了使VAV空调箱系统达到预期的效果,安装时我们注意保持机组外部完整无损,内部各转动部件不得相碰,安装后应封口,防止杂物进入风机叶轮和盘管,并按设计图核查其型号、规格、左右式出口方向和安装后的水平度及垂直度,检查吊托架的牢固性和螺栓的紧固程度,在吊托架和箱体间应衬以橡胶减振垫,VAV空调箱的一次风入口与AHU机组送风管的联接应采用金属软管,二次风出口与其送风管应用柔性接头,避免箱体运转的噪声通过风管传播。
日立VAM方案书
尊敬的客户,您好:首先,非常感谢您对日立中央空调的支持与信任,我们是日立变频多联中央空调厂家直销专业店,将为您提供全方位的五星级优质服务:售前——销售工程师将细心聆听您的需求并进行现场勘察,由技术支持工程师为您量身设计,最终为您推荐针对于您的户型最佳的中央空调解决方案,希望能为您的选择提供帮助。
售中——技术支持工程师结合装修制作最佳的施工图纸,施工图纸由厂家技术支持部审核后,交由具有丰富中央空调安装经验的最优秀的施工队伍进行精细化安装。
专业店服务经理、厂家服务工程师对施工质量、安装材料直接进行质量监督并现场解决技术问题,安装完毕后厂家调试工程师现场调试。
售后——最高效、完善的售后服务,我们将在第一时间提供准确专业的售后服务,设有24小时服务专线。
重庆启辰机电设备有限公司二〇一四年一〇月目录第一部分品牌简介 (3)一、百年日立专业值得信赖 (3)二、精湛制造品质值得信赖 (4)三、精细化安装细节保证品质 (4)四、诚信服天下一诺重千金 (4)第二部分方案说明 (5)一、设计依据 (5)二、设计说明 (6)1、设计概况 (6)2、设备选型说明 (6)3、安装注意事项 (7)第三部分日立中央空调的优势 (9)一、日立产品技术特点说明 (9)二、变频多联中央空调与分体空调的对比 (15)第四五部分售后服务体系与维保方案 (16)一、售后服务范围、内容及响应的说明 (16)二、质保服务机构 (17)三、保修期服务承诺 (17)四、保修期满后服务承诺 (18)第五部分部分资质证书 (19)一、产品节能政府采购清单入选企业证书 (19)二、节能环保推荐品牌证书 (20)三、中国节能产品认证证书 (21)四、ROHS认证(环保绿色产品)证书 (22)第一部分品牌简介一、百年日立专业值得信赖日立,世界500强排名第52位,世界最受尊敬品牌排名前10位株式会社日立制作所创建于1910年,是世界上最大的综合跨国企业集团之一,在世界电机企业中高居第2位,在世界机械制造业排名,位居世界第3位。
DCS系统调试步骤
DCS系统调试步骤1.系统调试•主要分系统调试和联调两部分工作。
•系统调试是系统到现场后,对系统硬件、组态软件进行现场检验的过程,以确保供应的硬件、软件满足用户的要求。
•联调工作是系统同现场的一次测量元件联动调试的过程,确保能够正常反映现场实际的工艺状况,驱动现场的执行机构。
•一般先做调试,后做联调。
2.调试的主要工作•硬件开箱、安装•通讯网络设置、连接、标号•系统上电•确定计算机启动时能够自动进入NT画面•确定系统重新启动时没有系统设备出错的提示;•调试•系统联调•控制方案成型3.系统上电系统上电前必须确认供电、接地良好,包括接地端子接触、接地端对地电阻。
首先合上配电箱的总断路器,检查输出电压是否符合220V±10%;λ合上配电箱内的各支路断路器,分别检查输出电压;λ若配有UPS或稳压电源,检查UPS或稳压电源输出电压是否正常,不正常则查找原因,恢复λ后才能继续以下上电步骤;控制站上电(电源箱依次上电检查;机笼配电检查;卡件自检;卡件冗余测试等)λ操作站上电(λ操作站的显示器、工控机等设备上电;计算机自检通过,检查确认Windows系统软件、JX-300X系统软件及应用软件的文件夹和文件是否正确;硬盘剩余空间测试)4.系统停电步骤每个操作站依次退出实时监控及操作系统后,关操作站工控机及显示器电源;逐个关控制站电源箱电源;关闭各个支路电源开关;关闭不间断电源(UPS)电源开关;关闭总电源开关。
5.调试—硬件测试•目的:为了检测控制站硬件是否工作正常根据系统组态的信号通道、信号类型、信号量程等资料,对每一通道进行25%、50%、75%三点测试,并记录相应数据。
该部分工作可根据用户实际需要,相应进行实施。
为了正确的测试数据,要求测试时各测量工具的精度等级不低于0.2级6.常见信号测试方法•4-20mA配电•所需工具为电阻箱、电流表和若干导线。
将配电卡件通道、电阻箱和电流表构成一回路,调节电阻值使电流表分别指示在8mA(25%)、12mA(50%)和16mA(75%),记录实时监控中相应位号的值。
酒店智能化系统调试步骤及流程
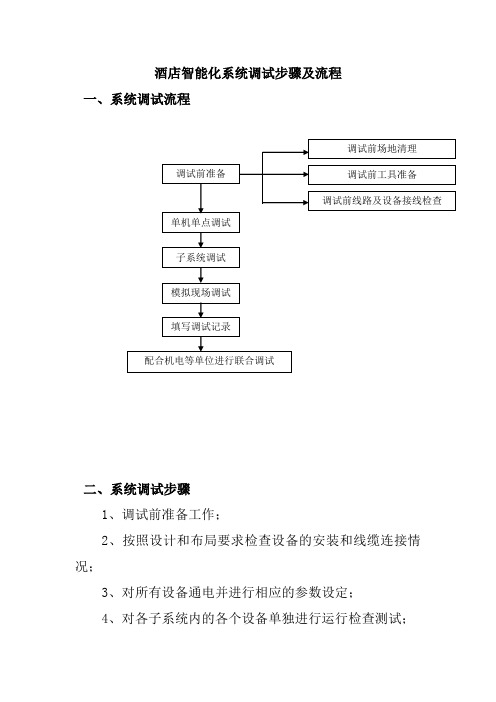
酒店智能化系统调试步骤及流程
一、系统调试流程
二、系统调试步骤
1、调试前准备工作;
2、按照设计和布局要求检查设备的安装和线缆连接情况;
3、对所有设备通电并进行相应的参数设定;
4、对各子系统内的各个设备单独进行运行检查测试;
5、将各子系统的所有相关设备配合使用,进行系统整体的调试并填写调试记录;
6、所有系统都完成基本的调试后,配合机电等其它单位进行整个广州大厦酒店弱电智能化系统设备采购及相关服务项目的总体联合调试。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、交换机的配置5120交换机:1、交换机恢复出厂设置方法:用web方式登陆在界面操作恢复出厂设置2、配置VLAN 1 IP地址,此地址即为交换机地址串口连接配置:波特率9600、数据位8、奇偶校验无、停止位1、数据流控制无interface Vlan-interface1ip address 128.0.200.106 255.240.0.03、配置telnet用户、密码及用户级别user-interfacevty 0user privilege level 3set authentication password simple admin4、配置web登陆用户及密码local-user adminpassword simple adminauthorization-attribute level 3service-type telnet5、若支持环路,则需配置stpstp enablestp ignored vlan 100 to 40946、把所有端口配置成vlan 1 内的hybrid untagged端口用admin:admin账号和密码web登陆交换机,配置此项,配置后显示如下:interface GigabitEthernet1/0/1port link-type hybridport hybrid vlan 1 untagged7、保存配置Save5048交换机:1、设置aux用户:user-interface aux 02、设置vty用户:user-interfacevty 03、设置web用户和密码:set authentication password adminuser-interface vty 14、配置某个端口属性:interface GigabitEthernet0/45port link-type hybridport hybrid vlan1 untagged5、将某个端口踢出vlan1:interface GigabitEthernet0/41port link-type hybridundo port hybrid vlan 1NMS配置文件首先,用六类跳线或千兆网线连接子架槽位与交换机端口,并记录其一一对应关系。
1、各种单盘与交换机端口的对应关系ScheduleManager2.js1)标准编码盘、标准解码盘、压缩编码盘、数字盘配置与其IP地址无关,只需要告诉系统其所在槽位对应的交换机端口号即可,配置如下:slotToSwitchPort(snmIp, shelfId, layerId, slotId, i, switchIp, switchPort );例:slotToSwitchPort( "128.0.4.202", 3, 0, 2, "128.0.200.107", 21 );其中,shelfid是NMC设备树上显示的(子架ID-1);layerId若在第一层则为0,若在第二层则为1;slotId是单盘所在层的(槽位号-1),每层均从0开始;2)2.5G路由盘2光口,每光口占2个交换机端口,必须插在偶数槽上,配置如下:ScheduleManager2.goeToSwitch( 2.5G路由盘IP, 2.5G路由盘光口Id, switchIp, switchPort, switchPort );例:ScheduleManager2.goeToSwitch( "128.9.7.0", 0, "128.0.200.107", 15, 13 );ScheduleManager2.goeToSwitch( "128.9.7.0", 1, "128.0.200.107", 14, 16 );其中,0号光口所对应的switchPort是此2.5G路由盘所插偶数槽位的1、2号口所对应的交换机的端口号,1号光口是3、4号口所对应的交换机的端口号;3)1.25G路由盘4光口,每光口占1个交换机端口,必须插在偶数槽上,配置如下:ScheduleManager2.goeToSwitch( 1.25G路由盘IP, portId, switchIp, switchPort, 0);例:ScheduleManager2.goeToSwitch( "128.4.2.0", 0, "128.0.200.106", 42, 0);ScheduleManager2.goeToSwitch( "128.4.2.0", 1, "128.0.200.106", 41, 0);ScheduleManager2.goeToSwitch( "128.4.2.0", 2, "128.0.200.106", 39, 0);ScheduleManager2.goeToSwitch( "128.4.2.0", 3, "128.0.200.106", 40, 0);其中,portId从0开始,共4个光口;switchPort为其所在偶数槽4个口所对应的交换机的4个端口号;4)一卡双收盘每2光口,每光口占1个交换机端口,配置如下:for(var i = 0; i < 8; ++i )ScheduleManager2.drToDRGE( "128.10.4.0", i, "128.10.4.0" , 0, 0);for(var i = 8; i < 16; ++i)ScheduleManager2.drToDRGE( "128.10.4.0", i, "128.10.4.0" , 1, 0);for(var i = 0; i < 20; ++i)ScheduleManager2.drToDRGE( "128.10.4.0", i, "128.10.4.0" , 0, 1);for(var i = 20; i < 40; ++i)ScheduleManager2.drToDRGE( "128.10.4.0", i, "128.10.4.0" , 1, 1);ScheduleManager2.drToSwitch( "128.10.4.0", 0, "128.0.200.106", 28);ScheduleManager2.drToSwitch( "128.10.4.0", 1, "128.0.200.106", 27);其中,8表示一卡双收一个光口所能承载最大8路视频,20表示其最大承载20路数据,for循环中括号内的倒数第二个数0表示视频,1表示音频;128.10.4.0是此一卡双收盘的IP,128.0.200.106是其所在交换机的IP,其余同上;5)可以直接用千兆网线连接两子架上的交换机,的配置:ScheduleManager2.switchToSwitchPort(switchIp_1, switchPort_1, switchIp_2, switchPort_2 );其中,switchPort_1是switchIp_1上的某个端口,switchPort_2是switchIp_2上的某个端口;6)ADM改造盘(NLI)需要插在偶数槽上,占用2个交换机端口,ADM最大承载10路视频,离NLI最远的节点机为1号节点机,前8号节点机走1号交换机端口,后2号节点机走2号交换机端口,其配置如下:slotToSwitchPort( "子网IP", 子架编号, 层数, 槽位号, "交换机IP", 交换机端口);addNliToSwitch("NLI的IP",对应的第1个交换机端口,对应的第2个交换机端口);例:slotToSwitchPort( "128.0.4.202", 3, 0, 9, "128.0.200.107", 12 );ScheduleManager2.addNliToSwitch("128.0.13.1", 12, 9);其中,slotToSwitchPort中只定义其对应交换机的第一个端口即可;7)交换机登陆用户的配置:ScheduleManager2.addSwitch(switchIp, telnet用户名, telnet用户所对应的密码, 交换机支持的总端口数, 交换机型号);例:ScheduleManager2.addSwitch( "128.0.200.106", "admin", "admin", 48, 5120 );其中,交换机型号为5120或5048;8)是否支持业务倒换的配置:ScheduleManager2.setTransFlag(1);其中,括号中填0表示倒换功能关闭,填1表示倒换功能开启;2、子网IP配置NetworkManager.js1)为NMS添加其所要管理的所有SNM IP及其端口号:NetworkManager.addLinkAddr( SNM IP, 11000 ); //端口号固定为11000 2)配置支持的矩阵控制:NetworkManager.addMatrixType(0,"英飞拓矩阵"); //只支持英飞拓矩阵NetworkManager.addMatrixType(-1,"未知矩阵");3、Vlan id配置vid.js目前系统只支持固定vid,只有在此文件中为单盘分配vid,单盘调度才能成功;只需要对输入节点配置vid,即为标准编码盘、数字盘、远端链路盘、一卡双收盘、8V点对点远端盘、ADM盘进行配置;1)配置vid的起始id:var vid = 100;ScheduleManager2.setVidStrategy(1);2)配置标准编码盘的vid:for ( var j = 0; j < 8; ++j ){ScheduleManager2.allocVid( "128.1.1.0", j, 0, vid++ );} //128.1.1.0为标准编码盘IP,0表示视频3)配置数字盘的vid:for ( var j = 0; j < 10; ++j ){ScheduleManager2.allocVid( "128.3.1.0", j, 1, vid++ );} //128.3.1.0为标准编码盘IP,1表示音频4)配置远端链路盘的vid:ScheduleManager2.allocVid( "128.5.1.0", 0, 0, vid++ ); //1V5)配置一卡双收盘的vid:for ( var j = 0; j < 16; ++j ){ScheduleManager2.allocVid( "128.10.4.0", j, 0, vid++ );} //视频for ( var j = 0; j < 40; ++j ){ScheduleManager2.allocVid( "128.10.4.0", j, 1, vid++ );} //数据6)配置8V点对点远端的vid:for ( var j = 0; j < 8; ++j ){ScheduleManager2.allocVid( "128.11.3.0", j, 0, vid++ );} //视频for ( var j = 0; j < 20; ++j ){ScheduleManager2.allocVid( "128.11.3.0", j, 1, vid++ );} //音频7)配置ADM盘的vid:for ( var j = 0; j < 10; ++j ) //目前ADM只支持10路视频{ScheduleManager2.allocVid( "128.0.13.1", j, 0, vid++ );}二、服务器及客户端的安装1、服务器linux环境1)服务器linux镜像文件烧写到网管盘的2G或4G的内存卡中,烧写工具为WinHex,在“打开磁盘”中选择需要烧录的内存卡,在“恢复镜像”中选择烧录的镜像文件进行烧录即可;2)修改镜像中默认IP 128.0.4.200,修改方式为用telnet方式登陆或直接显示器接网管盘,修改/etc/sysconfig/network-scripts/ifcfg-eht0中IP地址为要修改的地址后,重启网管盘;3)用ps -a查看snm、postgresql、nms进程是否处于默认运行状态,若未启动,则手动启动命令为:/etc/init.d/vam_snm start/stop/restart或/etc/init.d/vam_nmsstart,在这之前,确保service postgresql start;(postgresql可能运行不成功,需要手动初始化,su–postgres; cd /opt/pgsql; ./initlsh; ./vam.sh??)4)一般情况下,只有snm在网管盘linux环境下运行,此时需关闭PostgreSQL和nms的自动开机选项,命令:chkconfig–del postgresql或vam_nms,重启网管盘即可;2、服务器windows环境1)服务器windows安装可选择性安装,即snm、PostgreSQL、nms三选一或三选多,一般PostgreSQL和nms安装在windowsXP或2003环境中;注:PostgreSQL只能运行在NTFS文件格式下;2)此三程序均做成服务运行,修改配置文件后需关闭服务并在任务管理器中关闭进程后,方可重启使用;3、服务器NMS的配置修改Linux环境中/opt/vam/nms/bin/config/app目录下修改ScheduleManager2.js、NetworkManager.js、vid.js三文件即可;Windows环境下的目录相似;4、客户端客户端NMC、MSC、EAC安装到windowsXP环境下的任意目录均可;5、PostgreSQL的备份和恢复工具在服务器安装目录下的pgsql/bin下1、备份pg_dump–f d:\vam.bak –h localhost–p 5432 –U vamvam2、恢复createuservamcreatedb–U postgres–E UTF8 –O vamvampsql–U postgresvam< d:\vam.bak三、单盘嵌入式程序的烧写和配置修改单盘u-boot、kernel、file system的烧写,文件名一般对应为u-boot.bin,uImage,rootfs.img,烧写方法如下:1、用串口控制烧写,打开超级终端,设置串口参数为波特率115200,数据位8,奇偶校验无,停止位1,数据流控制无,按enter进入环境设置模式,设置单盘IP和tftp服务器的IP地址,并设定是用哪个网口进行数据传输,命令如下:setenvipaddr 192.11.1.10setenvserverip 192.11.1.200setenvnetdev eth1 //此为千兆以太网口,若用盘控器上的百兆网口,则setenvethact ppc_4xx_eth1 //不需要设定此两句saveenv本身配置可用print查看2、烧写u-boot:protect off allera 0xfffc0000 0xfffffffftftp 0x200000 u-boot.bincp.b 0x200000 0xfffc0000 ${filesize}3、烧写内核uImage:protect off allera 0xffe00000 0xfff7fffftftp 0x200000 uImagecp.b 0x200000 0xffe00000 ${filesize}4、烧写文件系统rootfs.img:protect off allera 0xfc000000 0xfdfffffftftp 0x200000 rootfs-jffs.imgcp.b 0x200000 0xfc000000 ${filesize}5、如上三个模块的整合img的烧写,文件名一般为vam_embedded.img,烧写工具为PPC-Debugger,参照《PPC-Debugger User Manual.pdf》的步骤进行烧写:CPU_Type“PPC405EP”SDRAM_Size 128MBFlash_Bank_Type“SPANSION S29GL256N”Flash_Bank_Chip_Width16bitFlash_Bank_Chip_Num 1Flash_Bank_Bus_Width16bitFlash_Bank_Base 32MB @ 0xFC000000 //起始地址为0xFC0000006、修改单盘的SNM地址:/etc/init.d/rcS文件中修改最后一行”—snmIp=128.0.4.201”此地址为此单盘所在snm 的地址;7、上传单盘map,并下发到iic上:用MapProducer.exe README生成map文件,并用tftp–gr map serverip(tftp server)上传到单盘的/opt/iic目录下,用iicsend 0x50 map下发到iic上,reboot单盘即可;8、单盘map文件的生成:0:标准音频输入;1:标准音频输出;2:半双工485;3:全双工485;4:全双工232;5:开关量输入;6:开关量输出;7:双向音频;8:aiphonein主机;9:aiphoneout 从机;255:不分配该通道;1)标准编码盘、标准解码盘、路由盘map生成标准编码盘SVE E 00:01:01 //128.0.1.1标准解码盘SVD D 00:02:01 //128.0.2.11.25G路由盘GOE G 04:01:00 //128.4.1.02.5G路由盘O 09:01:00 //128.9.1.02)压缩编码盘map生成压缩编码盘支持8个扩展通道,目前只支持音频输出,即async_channels11111111H 00:09:01 //128.0.9.13)远端链路盘map生成远端盘视频通道个数rap_video_channel_count 1 //目前最大为6远端盘异步数字通道rap_data_channels 0 //一个音频输入通道R 00:05:01 //128.0.5.14)异步数字盘map生成一个异步数字盘目前最大支持10个通道,1个插件含2个通道:async_channels77 4 4 2 2 5 566若为Aiphone主机,则只能插2个Aiphone插件,每插件2通道:async_channels8 8 8 8A 03:01:00 //128.3.1.05)8V点对点远端map生成可支持2个扩展盘,每扩展盘10通道,每2通道一个插件:p2p_remote_asyn_channels 4 4 4 4 2 2 2 2 , 9 9 9 9F 0b:01:00 //128.11.1.06)一卡双收盘map生成一卡双收盘两个光口,每光口可接1个8V远端,每8V远端可接2个扩展盘,每扩展盘10通道,因此一卡双收对应其所接的远端扩展通道不同而作不同配置async_channels4 4 4 4 2 2 2 2 2 2 255 255 255 255 255 255 9 9 9 9 9 9 9 9 9 9 255255 255 255 255 2557 7 7 7 5 5 5 5 5 5 255 255 255 255 255 255 9 9 9 9 9 9 9 9 9 9255 255 255 255 255 255如上,红色部分为第一个光口所接8V远端扩展盘上支持的通道,对应的每个扩展盘的前10位一定要为有效数字(0-9),后6位以255补齐;蓝色部分为第二个光口所接8V远端扩展盘上支持的通道;L 00:0a:01 //128.0.10.17)ADM盘map生成(其数据是透传的,不需要在map上定义)ADM本地接入盘光端机配置,其后接了4个节点机,两个4 Video通道,两个2 video通道lvi_remote_video_channels44 2 2M 00:0d:01 //128.0.13.1四、各种盘的光纤连接1、1.25G路由盘:1)两1.25G路由盘连接,WT44403F-3FS(蓝1310nm)和WT44405D-3FS(绿1550nm)成对使用即可;2)1.25G路由盘接远端链路盘:WT44405d-3FS(绿)接链路盘1的上行光口,链路盘1的下行光口接链路盘2的上行光口,链路盘2的下行光口接WT44403F-3FS(蓝)即形成环路;2、2.5G路由盘:WT55405D-3FS(绿)和WT55403D-3FS(蓝)成对使用即可;4、一卡双收盘:WT24603F-3FS(蓝)接8V点对点远端盘即可;5、ADM盘:WT24603F-3FS(蓝)接远端节点即可。