10第十章 PWM定时器
PWM控制的基本原理及相关概念

PWM控制的基本原理及相关概念PWM(Pulse Width Modulation)即脉宽调制,是一种常用的控制技术,广泛应用于电力电子、自动控制和通信等领域。
它通过调整脉冲信号的脉宽来实现对电路、设备或系统的精确控制。
PWM控制的基本原理是利用高电平和低电平的脉冲信号的占空比(即高电平时间与周期时间的比值)来控制输出信号的幅度、频率和相位等参数。
脉冲信号的高电平部分被称为脉宽,低电平部分称为空闲时间,整个脉冲周期的时间为周期。
脉冲信号的频率是指单位时间内脉冲信号的周期数。
PWM控制可以通过改变脉冲信号的占空比来调节输出信号的平均值,从而实现对电路或设备的控制。
占空比越大,输出信号平均值越大,反之则越小。
通过周期性的高低电平的切换,PWM能够提供多种输出级别,具有高效、精确度高等优点。
在PWM控制中,常用的术语包括周期(T)、频率(F)、占空比(Duty Cycle)、调制周期(Modulation Period)等概念。
周期是指脉冲信号一个完整的周期所需要的时间,频率是指单位时间内脉冲信号的周期数。
占空比是指高电平时间与周期时间的比值,通常使用百分比表示。
调制周期是指脉冲信号的一个周期中所包含的波形个数。
例如,当频率为10kHz的PWM信号的调制周期为32,表示每个脉冲周期内有32个波形。
PWM控制的优点之一是其宽广范围的应用。
它可以控制电机的转速、大功率的电磁阀、LED的亮度、音频放大器的音量等。
PWM还可以实现数字-模拟转换(DAC)功能,将数字信号转换为模拟信号输出。
此外,PWM信号的幅度、频率和相位可以通过改变调制器的控制参数来实现,具有很高的灵活性。
PWM控制的实现方式有多种,常用的方法包括基于定时器的PWM控制、比较器型PWM控制、电流型PWM控制等。
其中,基于定时器的PWM控制是最常见的方法。
它通过定时器的计数和比较功能产生PWM信号,可以根据需求来设定周期、占空比等参数,从而实现对输出信号的控制。
STM系列微控制器的PWM输出和定时器配置方法

STM系列微控制器的PWM输出和定时器配置方法在STM系列微控制器中,PWM输出和定时器配置方法对于实现精确控制和处理各种应用任务至关重要。
本文将探讨如何在STM微控制器中配置和利用PWM输出以及定时器功能来满足不同的需求。
一、PWM输出配置方法在STM系列微控制器中,配置PWM输出通常需要以下步骤:1. 初始化定时器:选择一个合适的定时器,设置其相关参数,例如时钟频率、预分频因子等。
2. 配置定时器的工作模式:选择合适的工作模式,如定时器模式、单脉冲模式、PWM模式等。
3. 配置定时器的输出模式:选择PWM输出模式,并设置相关参数,如占空比、周期等。
4. 配置GPIO引脚:将相关的GPIO引脚与定时器的输出通道连接起来,并配置为PWM输出功能。
通过以上步骤,可以实现对PWM输出的配置和控制。
具体的配置方法可以参考STM系列微控制器的产品手册和开发工具包提供的相关资料。
二、定时器配置方法定时器在STM系列微控制器中既可以用于计时,也可以用于生成各种定时事件。
下面介绍一种常用的定时器配置方法:1. 初始化定时器:选择一个合适的定时器,设置其相关参数,例如时钟频率、预分频因子等。
2. 配置定时器的工作模式:根据需求选择定时器的工作模式,如定时器模式、输入捕获模式、输出比较模式等。
3. 配置定时器的计数器周期:设置定时器的计数器周期,即计数器溢出前的计数值。
这个值可以根据实际需求来确定。
4. 配置定时器的中断:根据需求选择是否使能定时器的中断功能,并设置相关的中断优先级。
通过以上步骤,可以配置和控制定时器,实现各种定时任务的触发和处理。
具体的配置方法可以参考STM系列微控制器的产品手册和开发工具包提供的相关资料。
三、PWM输出和定时器配置的应用案例PWM输出和定时器功能在现实应用中有广泛的应用。
以下是一些常见的应用案例:1. 电机控制:通过配置PWM输出和定时器,可以实现对电机速度和方向的控制。
通过调整PWM占空比和周期,可以实现电机的不同转速和运动方向。
定时器与PWM控制信号
功率控制的PWM等效控制
如果控制
STM32F103
PWM 介绍
STM32F1 除了基本定时器 TIM6 和TIM7, 其他定时器都可以产生 PWM 输出。其中高 级定时器 TIM1 和 TIM8 可以同时产生多 达 7 路的 PWM 输出。 而通用定时器也能 同时产生多达 4 路的 PWM 输出。 PWM 的输出其实就是对外输出脉宽可调 (即占空比调节)的方波信号,信号频率是 由自动重装寄存器 ARR 的值决定,占空比 由比较寄存器 CCR 的值决定。
PWM 简介
PWM 是 Pulse Width Modulation 的缩写, 中文意思就是脉冲宽度调制,简称脉宽调制。 它是利用微处理器的数字输出来对模拟电路 进行控制的一种非常有效的技术,其控制简 单、灵活和动态响应好等优点而成为电力电 子技术最广泛应用的控制方式,其应用领域 包括测量,通信,功率控制与变换,电动机 控制、伺服控制、调光、开关电源,甚至某 些音频放大器,因此学习 PWM 具有十分重 要的现实意义。
它是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术其控制简单灵活和动态响应好等优点而成为电力电子技术最广泛应用的控制方式其应用领域包括测量通信功率控制与变换电动机控制伺服控制调光开关电源甚至某些音频放大器因此学习pwm具有十分重要的现实意义
定时器与PWM控制信号
内容
PWM 简介 通用定时器 PWM 输出配置步骤 硬件设计 软件设计 PWM实验现象
(2)初始化定时器参数,包含自动重装值, 分频系数,计数方式
voidTIM_TimeBaseInit(TIM_TypeDef* TIMx,TIM_TimeBaseInitTypeDef*
(3)初始化 PWM 输出参数,包含 PWM 模式、输出极性,使能
PWM定时器
TCNTB0寄存器的值被自动装入TCMP0和TCNT0中,开始下一个计数流
程。
定时器n的输出管脚TOUTn初始状态为高电平,当TCNTn的值等于
TCMPn的值、TCNTn的值等于0时都会发生反转,
也可以通过TCON寄存器设置其初始电平,这样TOUTn的输出就完全反
相了,
通过设置TCMPBn与TCNTBn的值可以设置管脚TOUT输出信号的占空
比,这就是所谓的可调制脉冲(PWM),所以这些定时器又被称为PWM定时
器。
三、寄存器使用方法
1、TCFG0
【7:0】、【15:8】分别用于控制预分频器0、1,经过预分频器出来的时
钟频率为:PCLK/(perscaler value + 1);
没有TCMPBn,定时器4没有输出引脚
5、TCNTOn
6、TCON
TCON有4个作用:
(1)第一次启动定时器时,将TCNTBn、TCMPBn的值装入TCNTn、
TCMPn中;
(2)启动、停止定时器;
(3)设置自动重载;
(4)设置TOUTn是否反转;
【3:0】用于定时器0
【11:8】用于定时器1
【15:12】用于定时器2
【19:16】用于定时器3
【22:20】用于定时器4,没有输出引脚反转位
位0:0停止定时器,1开启定时器;
位1:1将TCNTBn、TCMPBn的值装入TCNTn、TCMPn中;
位2:0TOUTn不反转,1TOUTn反转;
位3:0不自动加载,1自动加载;
在第一次使用定时器时,需要设置位1,使TCNTBn/TCMPBn的值装入
2、TCFG1
定时器,PWM
PWM定时器概述
• PWM定时器具有6个16位定时器,每个 定时器可以按照中断模式或DMA模式工 作。 • 定时器0,1,2,3和4具有PWM输出功 能。定时器5是一个内部定时器不具有 对外输出口线。定时器0具有死区发生 器,通常用于大电流设备应用
PWM定时器特性
• 6个16 位定时器可以工作在中断模式或 DMA模式; • 3个8 位预分频器和2个5位分割器和1个4 位分割器; • 输出波形的占空比可编程控制(PWM) • 自动加载模式或单触发脉冲模式; • 死区产生器;
• 其中:占空比<1。
实验参考代码及说明
#include “44b.h” /*包含文件*/ Void test_pwm(); /*函数*/ • //函数名称:Main,功能描述:测试程序主函数 • //返回类型:int 参 数:void • Void main() • { • test_pwm(); • while(1); • }
TCMPBn
Bit
Description
Initial State
定时器比较缓冲区寄存器 [15:0] Setting compare buffer value 0x00000000 for Timer(0..4)
注:定时器5不具有比较缓冲区寄存器
TCNTBn Bit Description Initial State
定时器计数缓冲区寄存器 [15:0] Setting compare buffer value 0x00000000 for Timer(0..5)
定时器n计数观察寄存器(TCNTOn)
TCMPBn
定时器观察寄存器
Bit
Description
Initial State
pwm的工作原理
pwm的工作原理PWM的全称是Pulse Width Modulation,中文意思是脉宽调制。
它是一种通过改变脉冲信号的宽度来传输信息的调制方式。
在现代电子技术中,PWM被广泛应用于电力电子、通信、自动控制等领域。
本文将介绍PWM的工作原理及其在实际应用中的特点和优势。
PWM的工作原理。
PWM的工作原理可以简单描述为通过改变脉冲信号的占空比来控制电路的输出。
在一个完整的PWM周期内,包括一个固定频率的周期性脉冲信号和一个可变的占空比。
占空比是指脉冲信号中高电平时间占整个周期的比例,通常用百分比表示。
在PWM信号中,当占空比为50%时,表示高电平和低电平的时间相等,这时电路的输出为中间值。
当占空比小于50%时,高电平时间减少,电路的输出信号会相应减小;反之,当占空比大于50%时,高电平时间增加,电路的输出信号会相应增大。
通过调整占空比,可以实现对电路输出的精确控制。
PWM的实现方式。
PWM信号的生成可以通过硬件电路或者软件算法来实现。
在硬件电路中,常用的方法是利用定时器来生成固定频率的脉冲信号,然后通过比较器来调整占空比。
而在软件算法中,可以通过程序控制IO口的高低电平来实现PWM信号的输出。
在实际应用中,PWM信号通常用来控制电机的转速、调节LED 的亮度、调节电源的输出等。
例如,通过改变电机驱动器输入的PWM信号占空比,可以实现电机的精确转速调节;通过改变LED驱动电路输入的PWM信号占空比,可以实现LED灯的亮度调节。
PWM的特点和优势。
与传统的模拟调制方式相比,PWM具有以下几点特点和优势:1. 精确控制,通过改变占空比,可以实现对电路输出信号的精确控制,具有较高的分辨率和稳定性。
2. 能效高,PWM信号的平均功率较高,能够提高电路的能效,减小能量损耗。
3. 抗干扰能力强,PWM信号的数字特性使其具有较强的抗干扰能力,能够适应复杂的工作环境。
4. 适应性强,PWM信号可以适用于不同类型的电路和设备,具有较强的通用性和灵活性。
PWM控制的基本原理

PWM控制的基本原理PWM(Pulse Width Modulation)即脉宽调制,是一种根据不同的脉冲宽度来控制电子设备的方法。
它被广泛应用于电力电子领域,特别是在电机控制、功率变换和光电器件中。
PWM的基本原理是通过改变脉冲的高电平时间(也称为脉冲宽度)来控制电子设备的输出。
脉冲宽度决定了设备的输出功率或电流大小。
通常情况下,PWM信号具有固定的频率和可变的占空比。
占空比(Duty Cycle)定义了脉冲高电平时间所占的比例。
PWM的基本用途是实现对电子信号的模拟控制。
通过调整脉冲的占空比,可以实现对设备输出的精确控制。
以电机控制为例,PWM信号通过调整电机的开关周期和占空比来改变电机的转速和扭矩。
在功率变换中,PWM信号可以通过切换器来将电能从一个电源传输到另一个电源。
在实现PWM控制时,首先设置定时器的计数周期和脉冲宽度。
计数周期通常由一个固定的时间基准确定,例如晶体振荡器或时钟信号。
脉冲宽度通常由控制系统在每个周期内动态地计算,并根据需要进行调整。
一旦定时器的计数周期和脉冲宽度设置好,定时器将开始计数。
在每个计数周期结束时,定时器将自动触发一个比较器,比较当前计数值与设置的脉冲宽度。
如果计数值小于脉冲宽度,输出信号将保持高电平,否则将变为低电平。
通过不断地重复以上的计数过程,PWM信号可以以固定的频率周期性地产生。
脉冲宽度的变化通过改变比较器的阈值来实现,从而实现对输出的精确控制。
PWM控制具有很多优点。
首先,它提供了精确的输出控制,可以实现高精度的电子设备控制。
其次,PWM信号具有较高的能量传输效率,能够显着减少能量的损耗。
此外,PWM控制还可以通过调整脉冲宽度来实现对设备的过载保护。
总之,PWM控制是一种通过改变脉冲宽度来控制电子设备输出的方法。
它通过定时器和比较器的配合,实现对脉冲信号的周期性产生和精确调节。
通过PWM控制,可以实现高精度、高效率和稳定的电子设备控制。
PWM timer
PWM timerOVERVIEWThe S3C2440A has five 16-bit timers. Timer 0, 1, 2, and 3 have Pulse Width Modulation (PWM) function. Timer 4 has an internal timer only with no output pins. The timer 0 has a dead-zone generator, which is used with a large current device.S3C2440A有5个16位定时器。
定时器0,1,2和3具有PWM功能,定时器4是内部定时没有输出引脚。
定时器0有个一Dead-zone发生器,被用于和大电流设备。
The timer 0 and 1 share an 8-bit prescaler, while the timer 2, 3 and 4 share other 8-bit prescaler. Each timer has a clock divider, which generates 5 different divided signals (1/2, 1/4, 1/8, 1/16, and TCLK). Each timer block receives its own clock signals from the clock divider, which receives the clock from the corresponding 8-bit prescaler. The 8-bit prescaler is programmable and divides the PCLK according to the loading value, which is stored in TCFG0 and TCFG1 registers.定时器0和1共用一个8为预定标器(prescaler),定时器2,3和4共用另一个8位预定标器。
S3C2410中文手册第10章 PWM定时器
PWM Timer概述S3C2410A有5个16位定时器。
其中定时器0、1、2、3有脉宽调制(PWM)功能。
定时器4有只有一个内部定时器而没有输出管脚。
定时器0有一个死区发生器,用于大电流器件。
定时器0和1共享一个8位预定标器,定时器2、3和4共享另一个8位预定标器。
每一个定时器有一个有5种不同值的时钟分割器(1/2,1/4,1/8,1/16和TCLK)。
其中每一个定时器块从时钟分割器接收时钟信号,而时钟分割器从响应的预定标器接收时钟信号。
8位预定标器是可编程的,它根据TCFG0和TCFG1中的数值分割PCLK。
在定时器计数缓冲寄存器(TCNTBn)中有一个初始值,当定时器使能后,这个值就被装载到递减计数器中。
而在定时器比较缓冲寄存器(TCMPBn)中也有一个初始值,这一值被装载到比较寄存器中,用来与递减计数器值进行比较。
这两个缓冲器使得在频率和占空比发生改变时仍能产生一个稳定的输出。
每一个定时器有一个16位的递减计数器,由定时器时钟驱动。
当计数器的值到0,定时器就会产生一个中断请求来通知CPU定时器的操作已经完成。
当定时器计数器到0时,TCNTn的值自动的加载到递减计数器中以继续下一操作。
但是,当定时器因某种原因停止,如在定时器运行模式中清除定时器使能位(TCONn中)时,TCNTBn中的值将不再加载到计数器中。
TCMPBn中的数据是用来脉宽调制的。
当递减计数器的值与比较寄存器的值相同时,定时器控制逻辑将改变输出电平。
因此,比较寄存器决定一个PWM 输出的接通时间。
特性◆5个16位定时器;◆2个8位预定标器和2个4位分割器;◆可编程的占空比;◆自动再装入模式或一次脉冲模式;◆死区发生器。
图1、16位PWM定时器模块框图预定标器和分割器定时器基本操作图2、定时器运行时序一个定时器(定时器4除外)都包含TCNTBn、TCNTn、TCMPBn和TCMPn 几个寄存器。
(TCNTn和TCMPn是内部寄存器的名称。
定时器计数器和PWM模块
PWM模块 --PWM模块概述
可选的死区控制及可调的死区时间提供了互补的输 出,在每个过渡过程输出为低。互补输出和死区时间经 常用在驱动半桥配置的功率器件,以避免短路对器件造 成的损害。当使能一个kill输入时,能禁止死区输出。 PWM模块提供了3个kill模式来支持多重应用环境。
第7页/共47页
计数器模块 --计数器模块功能概述
计数器模块的实现有两种方式:固定功能和UDB。 当布局选项使用固定模式配置定时器模块时,计数器 被放置在芯片的固定功能块内。当使用固定功能的配置 时,计数器为一个简单的计数器,如下图所示。
第8页/共47页
计数器模块 --计数器模块功能概述
如右图所示,其功能包括:
本章内容
本章介绍了定时器、计数器、PWM模块,以 及使用PWM方式控制LED的实现。在介绍定时 器、计数器和PWM模块时,分别介绍了这些模块 的功能和一些典型应用。在介绍PWM控制LED的 实现中,详细介绍了使用PSoC Creator实现的设计 方法和设计流程。
第1页/共47页
定时器模块 --定时器模块功能概述
高/低时间测量模式
第6页/共47页
定时器模块 --定时器模块的应用
如上图所示,只要从捕获FIFO中读取数据,捕获的 高和低时间就可以按照下式进行计算:
高时间#1=(Period-Capture#1)*时钟频率; (1) 低时间#2=(Capture#1-Capture#2)*时钟频率;(2) 高时间#2=(Capture#2-Capture#3)*时钟频率;(3)
1. 默认的计数器实现 如下图所示,计数器的默认配置提供了最基本的计
数功能用于在输入时钟上升沿简单的增加计数值。当复 位的时候,计数器归零。TC终止计数指示计数值是否达 到了预设的计数初值。计数值的范围:1~2**分辨率-1。
S3C2410-第十章PWM及定时器
第十章PWM及定时器10.1概述S3c2440A有5个16位的定时器。
定时器0、1、2、3有脉宽调制功能(PWM)。
定时器4有一个没有输出引脚的内部定时器。
定时器0有一个用于大电流设备的死区生成器。
定时器0和1共享一个8位的预分频器(预定标器),定时器2,3,4共享另一个8位预分频器(预定标器)。
每个定时器有一个时钟分频器,其可以生成5种不同的分频信号(1/2,1/4,1/8,1/16和TCLK)。
每个定时器模块从时钟分频器接收其自己的时钟信号,其分频器从相应的8位预分频器(预定标器)接收时钟。
8位的预标定器是可编程的且根据装载的值来分频PCLK,其值存储在TCFG0和TCFG1寄存器中。
当定时器使能,定时器计数缓存寄存器(TCNTBn)得到一个被装载到递减计数器中的初始值。
定时器比较缓存寄存器(TCMPBn)有一个被装载到比较寄存器中用来和递减计数器的值作比较的初始值。
TCNTBn和TCMPBn双缓存特点使得当频率和负荷比发生改变时,定时器生成一个稳定的输出。
每个定时器有一个自己的由定时器时钟驱动的16位递减计数器。
当递减计数器为零时,定时器中断请求生成通知CPU定时器操作已经完成。
当定时器计数器达到0,相应的TCNTBn的值也知道装载到递减计数器中以继续下一个操作。
但是如果定时器停止了,例如在定时器运行模式下通过对TCONn的定时器使能位清零,则TCNTBn的值不会装载到计数器中。
TCMPBn的值用于脉宽调制。
当递减计数器的值和定时器控制逻辑中的比较寄存器的值匹配时,定时器控制逻辑改变输出电平。
因此,比较寄存器决定了PWM输出的开启时间。
10.2特性(1)5个16位定时器(2)两个8位预分频器(预定标器)和2个4位分频器(3)输出波形的可编程任务控制(4)自动重载模式或单脉冲模式(5)死区生成器10.2.1PWM定时器操作10.2.1.1预分频器(预定标器)和分频器一个8位的预分频器(预定标器)和一个4位的分频器得到以下输出频率:4位分频器设置最小分辨率(prescaler=0)最大分辨率(prescaler=255)最大间隔(TCNTBn=65535)1/2(PCLK=50MHz)0.0400us(25.0000MHz)10.2400us(97.6562MHz)0.6710sec 1/4(PCLK=50MHz)0.0800us(12.5000MHz)20.4800us(48.8281KHz) 1.3421sec 1/8(PCLK=50MHz)0.1600us(6.2500MHz)40.9601us(24.4140KHz) 2.6843sec 1/16(PCLK=50MHz)0.3200us(3.1250MHz)81.9188us(12.2070KHz) 5.3686sec10.2.1.2基本定时器操作定时器(除定时器通道5)有TCNTBn、TCNTn、TCMPBn和TCMPn。
PWM详细讲解
1、理论知识PWM这个功能在飞思卡尔、STM32等高档的单片机内部有专用的模块,用此类芯片实现PWM功能时只需要通过设置相应的寄存器就可实现周期和占空比的控制。
但是如果要用51单片机的话,也是可以的,但是比较的麻烦。
此时需要用到内部定时器来实现,可用两个定时器实现,也可以用一个定时器实现。
用两个定时器的方法是用定时器T0来控制频率,定时器T1来控制占空比。
大致的的编程思路是这样的:T0定时器中断让一个I0口输出高电平,在这个定时器T0的中断当中起动定时器T1,而这个T1是让IO口输出低电平,这样改变定时器T0的初值就可以改变频率,改变定时器T1的初值就可以改变占空比。
下面重点介绍用一个定时器的实现PWM的方法。
因为市面上的智能小车所采用的电机大多数为TT减速电机,通过反复的实验,此电机最佳的工作频率为1000HZ (太高容易发生哨叫,太低电机容易发生抖动),所以下面以周期为1ms(1000HZ)进行举例,要产生其它频率的PWM波,程序中只需作简单修改即可。
用一个定时器时(如定时器T0),首先你要确定PWM的周期T和占空比D,确定了这些以后,你可以用定时器产生一个时间基准t,比如定时器溢出n次的时间是PWM的高电平的时间,则D*T=n*t,类似的可以求出PWM低电平时间需要多少个时间基准n'。
因为这里我们是产生周期为1ms(1000HZ)的PWM,所以可设置中断的时间间隔为0.01ms,,然后中断100次即为1ms。
在中断子程序内,可设置一个变量如time,在中断子程序内,有三条重要的语句:1、当time>=100时,time清零(此语句保证频率为1000HZ),2、当time>n时(n应该在0-100之间变化开),让单片相应的I/O口输出高电平,当time<n时,让单片相应的I/O口输出低电平,此时占空比就为%n。
2、程序1,使单片机的I/O口输出固定频率的PWM波下面按上面的思路给出一个具体程序:/*******************************************************************/ /* 程序名:单片机输出固定频率的PWM波*//* 晶振:11.00592 MHz CPU型号:STC89C52 *//* 功能:P2^0口输出周期为1ms(1000HZ),占空比为%80的PWM波*//*****************************************************************/#include<reg52.h>#define uint unsigned int#define uchar unsigned charsbit PWM1=P2^0;//接IN1 控制正转sbit PWM2=P2^1;//接IN2 控制反转uchar time;void main(){TMOD=0x01;//定时器0工作方式1TH0=0xff;//(65536-10)/256;//赋初值定时TL0=0xf7;//(65536-10)%256;//0.01msEA=1;//开总中断ET0=1;//开定时器0中断TR0=1;//启动定时器0while(1){}}void delay(uint z){uint x,y;for(x=z;x>0;x--)for(y=500;y>0;y--);}void tim0() interrupt 1{TR0=0;//赋初值时,关闭定时器TH0=0xff;//(65536-10)/256;//赋初值定时TL0=0xf7;//(65536-10)%256;//0.01msTR0=1;//打开定时器time++;if(time>=100) time=0;//1khzif(time<=20) PWM1=0;//点空比%80else PWM1=1;PWM2=0;}程序说明:1、关于频率的确定:对于11.0592M晶振, PWM输出频率为1KHZ,此时设定时器0.01ms 中断一次,时中断次数100次即为1KHZ( 0.01ms*100=1ms,即为1000HZ)此时,定时器计数器赋初值为TH0=FF,TL0=F7。
定时器pwm原理
定时器pwm原理定时器PWM(脉宽调制)是一种用于控制电机速度、亮度调节和信号数字化的技术。
PWM通过改变脉冲的宽度来控制电路的输出。
在介绍PWM原理之前,先来了解一下定时器的基本原理。
定时器是一个计时设备,它可以生成定时脉冲和计数脉冲,并可以通过各种配置来满足不同的应用需求。
在大多数微控制器中,定时器是由一个计数器和一些控制寄存器组成的。
计数器可以按照固定的时钟频率进行自动计数,并在达到设置的阈值时触发中断或产生输出。
PWM的基本原理是利用定时器的计数功能和输出比较功能。
通过设置定时器的计数周期和比较寄存器的值,可以生成不同占空比的PWM信号。
在定时器中,我们可以设置计数周期值,用来定义一个完整的计数周期。
定时器计数器会从0开始计数,当计数值达到计数周期值时,计数器会清零重新开始计数。
通过设置计数周期值和比较寄存器的值,我们可以控制脉冲的宽度。
比较寄存器的值用来和计数器的值进行比较,当计数器的值小于比较寄存器的值时,输出状态为高电平;当计数器的值大于或等于比较寄存器的值时,输出状态为低电平。
利用这种原理,我们可以通过调整计数周期值和比较寄存器的值来改变PWM信号的占空比。
占空比定义为PWM信号高电平的时间占整个周期的比例。
通过增加或减小计数周期值,可以改变整个周期的长度,从而改变占空比。
例如,如果我们将计数周期值设置为100,比较寄存器的值设置为50,那么当计数器的值小于50时,输出为高电平;当计数器的值大于或等于50时,输出为低电平。
这样,我们就生成了一个占空比为50%的PWM信号。
定时器PWM的工作原理如下:1. 配置定时器的计数周期值。
根据需求设置一个合适的计数周期,周期的长度决定了PWM信号的频率。
2. 配置比较寄存器的值。
根据需求设置一个合适的比较值,比较值决定了PWM 信号的占空比。
较小的比较值生成较小的占空比,较大的比较值生成较大的占空比。
3. 启动定时器。
定时器开始计数,当计数器的值小于比较寄存器的值时,输出为高电平;当计数器的值大于或等于比较寄存器的值时,输出为低电平。
pwm定时器工作原理
pwm定时器工作原理
PWM定时器原理
1.什么是PWM定时器?
PWM定时器是一种微控制器,可以产生多个不同持续时间的脉冲,根据时钟,计数器和比较器的工作原理来实现。
2.PWM定时器的特点
PWM定时器的主要特点是可以通过控制时钟,计数器和比较器的工作原理,产生出多个不同持续时间和不同频率的脉冲波形。
它通常被用于调整电压、电流、温度、速度和灯光等常见应用,也可以控制大电机、空调以及压缩机等复杂控制应用。
3.PWM定时器的结构
PWM定时器的结构一般分为两个部分,分别为时钟/计数模块和比较模块。
(1)时钟/计数模块:负责周期性地产生脉冲波,确定计数器初始值,实现脉冲频率的控制,从而实现PWM波的产生。
(2)比较模块:负责将脉冲波的高低电平与计数值进行比较,实现电平变化。
4.PWM定时器的作用
(1)可以控制电压、电流和温度等;
(2)可以控制风速、灯光和蝙蝠速度等;
(3)可以控制大电机、空调和压缩机等复杂控制应用。
5.PWM定时器的应用
(1)电机控制:PWM定时器可以控制直流电机的转速,从而实现智能化的无刷直流电机驱动应用;
(2)开关控制:可以控制继电器的开启和关闭,以实现使用低压电源控制高压设备的目的;
(3)家用电器控制:可以用来控制电视的亮度和音量,以及水壶、吸尘器等家用电器。
pwm单片机原理
pwm单片机原理
PWM(脉宽调制)是一种常用的单片机控制技术,它通过调
整高电平和低电平的时间比例来实现对输出电压或电流的调节。
PWM 单片机原理基于脉冲信号的周期性和占空比的变化。
在 PWM 单片机原理中,首先需要确定一个固定的时间周期,通常称为 PWM 周期。
这个周期被划分为多个等宽的时间段,称为 PWM 脉冲宽度。
脉冲宽度表示了高电平的持续时间。
要实现 PWM 控制,需要一个时钟源来提供时间基准。
这个时钟源通常由单片机自带的定时器模块产生。
定时器在每个时钟周期内递增一个计数器。
当计数器的值小于脉冲宽度时,输出为高电平;当计数器的值大于等于脉冲宽度时,输出为低电平。
通过不断改变脉冲宽度,就可以控制输出信号的占空比。
PWM 的占空比是指高电平时间与一个PWM 周期时间的比值。
占空比决定了每个周期内高电平的时间比例,从而影响了输出信号的平均电压或电流。
占空比可以通过调整脉冲宽度来改变,通常通过改变定时器计数器的最大值实现。
使用 PWM 技术可以实现一些常见的应用,比如产生模拟信号,控制马达的转速和方向,控制LED 的亮度等。
它的优点是简单、高效,更能节省功耗。
总之,PWM 单片机原理是基于不断变化的脉冲宽度和占空比
来控制输出信号的技术。
通过调整计数器的值和最大值,可以实现对输出电压或电流的精确控制。
定时器的应用之pwm波产生原理
定时器的应用之pwm波产生原理1. 什么是定时器在嵌入式系统中,定时器是一种常见的硬件设备,用于生成一定时间间隔的中断信号或者产生特定频率的脉冲信号。
定时器可以用来控制各种应用,比如测量时间、实现定时任务等。
本文将重点介绍定时器的应用之一:pwm波的产生原理。
2. 什么是PWM波PWM(Pulse Width Modulation)是一种调制技术,通过改变信号的占空比来控制电平。
在PWM波中,信号的高电平时间和低电平时间的比例是可以调节的,这样就可以实现对电平的精确控制。
3. PWM波的产生原理使用定时器可以产生PWM波的基础是利用定时器的计数器和比较器功能。
在大多数的定时器中,有一个计数器用于计算时间的流逝,同时有一个或多个比较器用于比较计数器的值与设定值。
根据比较的结果,定时器可以产生中断信号或者输出特定的电平。
在产生PWM波的应用中,定时器的计数器被用来与设定的周期值进行比较,根据比较结果改变输出电平。
不同的占空比可以通过改变比较器的设定值来实现。
4. 使用定时器产生PWM波的步骤步骤一:配置定时器的工作模式首先需要配置定时器的工作模式为PWM模式。
这通常需要设置一些寄存器中的配置位,以确定定时器的工作方式、频率等参数。
步骤二:设置定时器的周期设置定时器的周期,即固定PWM波的周期,在这个周期内,比较器将会不断地进行比较,根据比较结果改变输出电平。
周期的计算通常需要根据一些参数,比如所需的PWM波频率和系统时钟频率。
步骤三:设置比较器的值根据所需的占空比,设置比较器的值。
比较器的值决定了高电平和低电平的时间长度。
对于一个占空比为50%的PWM波,比较器的值通常为周期的一半。
步骤四:启动定时器将定时器设置完成后,启动定时器开始产生PWM波。
5. 注意事项在使用定时器产生PWM波的过程中,需要注意以下几点: - 定时器的时钟频率和PWM波的频率之间需要有一定的关系,以确保能够精确地产生所需的频率。
PWM定时器

S3C2410A芯片内部有一个实时时钟(Real Time Clock,RTC)模块,当系统电源闭合时,使用系统 提供的电源,当系统电源切断时,由后备电池为RTC 模块供电。无论系统加电或切断电源,RTC都在运行; 可以对RTC设定报警时间。使用STRB/LDRB指令, 可以在RTC和CPU之间传送8位BCD码的数据,包括 秒、分、时、日、星期、月、年。RTC模块使用 32.768KHz的外部晶振工作。
定时器4是一个内部定时器,没有PWM功能,输出信 号不连接到S3C2410A引脚。
定时器0有一个死区发生器(dead zone generator),
能够用于对大电流设备进行控制。
2020/7/15
3
定时器0和1共用一个8位预分频器(prescaler),
定时器2~4共用另一个8位预分频器。
定时器计数时钟信号来源于时钟分频器(clock divider),通过编程能够选择时钟分频器的1/2、 1/4、1/8、1/16分频信号或选择使用TCLK0、 TCLK1。
TCNTBn值的不同,决定了输出信号TOUTn频率 的不同。
2020/7/15
7
⑵ 定时器比较缓冲器寄存器TCMPBn,程序可 读写,用于保存定时器比较初值。在手动更新允 许时,将这个初值送到定时器比较寄存器TCMPn。 当执行计数的TCNTn的值与TCMPn的值相等时, 计数器输出信号TOUTn电平由低变高。当自动重 装允许时,一次计数结束(TCNTn递减计数达到0 时),自动将TCMPBn的值装到TCMPn。
2020/7/15
22
❖ ⑴ 最小分辨率:
定时器输入时钟的频率
=PCLK/{prescaler值+1}/{divider值}
第10讲-定时_计数器0-CTC_PWM
比较标志位和溢出标志位寄存器TIFR
集美大学机械工程学院-郑东强
几个概念
BOTTOM 计数器计到0x00
MAX 计数器计到0xFF
TOP计数器计到计数序列的最大值 TOP 值可以为固定值0xFF,或是存储于比较寄 存器 OCR0,具体有赖于工作模式 ------注意MAX和TOP是不同的,在表格[波形产 生模式的位描述]可以看到它们的作用
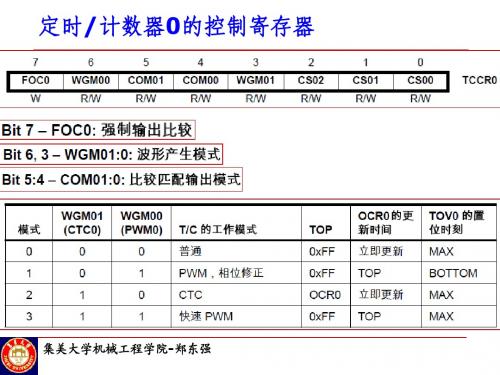
集美大学机械工程学院郑东强定时计数器0的控制寄存器集美大学机械工程学院郑东强定时计数器的时钟源选择集美大学机械工程学院郑东强tccr0的comxx比较输出模式非pwm模式集美大学机械工程学院郑东强tccr0的计数寄存器tcnt0集美大学机械工程学院郑东强tccr0的输出比较寄存器ocr0中断控制寄存器timsk比较标志位和溢出标志位寄存器tifr集美大学机械工程学院郑东强几个概念bottom计数器计到0x00max计数器计到0xfftop值可以为固定值0xff或是存储于比较寄注意max和top是不同的在表格波形产生模式的位描述可以看到它们的作用集美大学机械工程学院郑东强输出比较8位比较器持续对tcnt0和输出比较寄存器ocr0进行比较
集美大学机械工程学院-郑东强
CTC模式(输出方波)
频率由如下公式确定(N代表分频因子):
f OCx
f OCS 2 N (1 OCRx)
频率可变
集美大学机械工程学院-郑东强
快速PWM 模式(输出非对称PWM)
频率由如下公式确定(N代表分频因子):
f OCxPWM
f OCS N TOP
定时/计数器0的控制寄存器
集美大学机械工程学院-郑东强
定时/计数器的时钟源选择
集美大学机械工程学院-郑东强
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PWM Timer概述S3C2410A有5个16位定时器。
其中定时器0、1、2、3有脉宽调制(PWM)功能。
定时器4有只有一个内部定时7器而没有输出管脚。
定时器0有一个死区发生器,用于大电流器件。
定时器0和1共享一个8位预定标器,定时器2、3和4共享另一个8位预定标器。
每一个定时器有一个有5种不同值的时钟分割器(1/2,1/4,1/8,1/16和TCLK)。
其中每一个定时器块从时钟分割器接收时钟信号,而时钟分割器从响应的预定标器接收时钟信号。
8位预定标器是可编程的,它根据TCFG0和TCFG1中的数值分割PCLK。
在定时器计数缓冲寄存器(TCNTBn)中有一个初始值,当定时器使能后,这个值就被装载到递减计数器中。
而在定时器比较缓冲寄存器(TCMPBn)中也有一个初始值,这一值被装载到比较寄存器中,用来与递减计数器值进行比较。
这两个缓冲器使得在频率和占空比发生改变时仍能产生一个稳定的输出。
每一个定时器有一个16位的递减计数器,由定时器时钟驱动。
当计数器的值到0,定时器就会产生一个中断请求来通知CPU定时器的操作已经完成。
当定时器计数器到0时,TCNTBn的值自动的加载到递减计数器中以继续下一操作。
但是,当定时器因某种原因停止,如在定时器运行模式中清除定时器使能位(TCONn中)时,TCNTBn中的值将不再加载到计数器中。
TCMPBn中的数据是用来脉宽调制的。
当递减计数器的值与比较寄存器的值相同时,定时器控制逻辑将改变输出电平。
因此,比较寄存器决定一个PWM 输出的接通时间。
特性◆5个16位定时器;◆2个8位预定标器和2个4位分割器;◆可编程的占空比;◆自动再装入模式或一次脉冲模式;◆死区发生器。
图1、16位PWM定时器模块框图预定标器和分割器一个8位预定标器和一个4位分割器作用下的输出频率:4位分割器的设置最低分解力(预定标器=0)最高分解力(预定标器=255)最大间隔时间(TCNTBn=65535)1/2(PCLK=66.5MHz)0.0300us(33.2500MHz)7.6992us(129.8828KHz)0.5045sec1/4(PCLK=66.5MHz)0.0601us(16.6250MHz)15.3984us(64.9414KHz)1.0091sec1/8(PCLK=66.5MHz)0.1203us(8.3125MHz)30.7968us(32.4707KHz)2.0182sec1/16(PCLK=66.5MHz)0.2406us(4.1562MHz)61.5936us(16.2353KHz)4.0365sec定时器基本操作图2、定时器运行时序一个定时器(定时器4除外)都包含TCNTBn、TCNTn、TCMPBn和TCMPn 几个寄存器。
(TCNTn和TCMPn是内部寄存器的名称。
TCNTn的值可以通过读TCNTOn得到)当定时器达到0时,TCNTBn和TCMPBn的值将自动加载到TCNTn和TCMPn中。
当TCNTn到0且中断使能时,定时器将产生一个中断请求。
自动加载和双缓冲模式脉宽调制定时器有一个双缓冲功能,在这种情况下,改变下次加载值的同时不影响当前定时周期。
因此,尽管设置一个新的定时器值,当前定时器的操作将会继续完成而不受影响。
定时器的值可以写入定时器计数值缓冲寄存器(TCNTBn)中,而当前计数器的值可以通过读定时器计数值观测寄存器(TCNTOn)得到。
当TCNTn的值到0时,自动加载操作复制TCNTBn的值到TCNTn中。
但是如果自动加载模式没有使能,TCNT0将不进行任何操作。
图3、双缓冲功能时序图用手动更新位和逆变器位对定时器进行初始化当递减计数器的值到0时,自动加载操作才能进行。
所以,用户必须预先对TCNTn定义一个起始值。
因此,起始值必须由手动更新位载入。
以下步骤描述了怎么起始一个定时器:将初始值写入到TCNTBn和TCMPBn中;设置相应定时器的手动更新位。
推荐配置逆变器位开或关(不管逆变器用与否);设置相应定时器的起始位从而启动一个定时器(同时清除手动更新位)。
如果定时器被迫停止,TCNTn将保留计数器的值且不重载TCNTBn。
如果用户需要设置一个新值,必须执行手动更新。
注:无论何时TOUT逆变器开关位的值改变,TOUTn的逻辑值将随之改变。
因此,推荐逆变器开关位的配置与手动更新位同时进行。
定时器操作步骤:以下操作步骤地结果如图4所示。
[1]使能自动加载功能。
设置TCNTBn为160,TCMPBn为110。
设置手动更新位并配置逆变器位。
手动更新位设置TCNTn和TCMPn的值与TCNTBn和TCMPBn相同。
然后设置TCNTBn和TCMPBn的值分别为80和40,确定下一个周期的值。
[2]如果手动更新位为0、逆变器关且自动加载开,则设置起始位。
则在定时器的延迟时间后定时器开始递减计数。
[3]当TCNTn的值和TCMPn相等时,则TOUTn的逻辑电平将发生改变,由低到高。
[4]当TCNTn的值到0时,产生一个中断并且将TCNTBn的值加载到一个临时寄存器。
在下一个时钟周期,TCNTn由临时寄存器加载到TCNTn中。
[5]在中断服务程序中,TCNTBn和TCMPBn分别设置成80和60;[6]当TCNTn的值和TCMPn相等时,则TOUTn的逻辑电平将发生改变,由低到高。
[7]当TCNTn到0时,TCNTn自动重新加载,并出发一个中断请求;[8]在中断服务子程序,自动加载和中断请求都被禁止,从而将停止定时器;[9]当TCNTn的值和TCMPn相等时,则TOUTn的逻辑电平将发生改变,由低到高。
[10]当TCNTn的值为0时,TCNTn将不再重新加载新的值,从而定时器停止;[11]由于中断请求被禁止,不再产生中断请求。
图4、定时器操作示意图脉宽调制图5、脉宽调制示意脉宽调制功能可以通过改变TCMPBn的值实现。
PWM的频率由TCNTBn 决定。
图5是一个通过改变TCMPBn的值实现PWM的例子。
如果想得到一个高的PWM值,则要减小TCMPBn的值。
相反,如果想要得到一个低的PWM值,则要增加TCMPBn的值。
如果逆变器使能的话,则情况正好相反。
由于定时器具有双缓冲功能,则在当前周期的任何时间都可以通过ISR和其它程序改变TCMPBn的值。
输出电平控制以下步骤描述了如何在逆变器关闭的情况下,控制TOUT的值为高或低:关闭自动加载位。
然后,TOUT变高且在TCNTn为0后定时器停止运行;通过定时器开始位清零来停止定时器运行。
如果TCNTn<=TCMPn,则输出为高,如果TCNTn>TCMPn,输出为低;通过改变TCON中的逆变器开关位来使TOUTn为高或为低。
图6、逆变器开与关时的输出死区发生器死区是为了功率器件中的PWM控制。
这一功能使能在一个开关器件关闭和另一个开关器件开启的间隔时间。
这一时间间隔禁止了两个开关器件同时出于开启状态,即使是一段非常短的时间内。
TOUT0是一个PWM输出。
nTOUT0是TOUT0的反相。
如果死区使能,则TOUT0和nTOUT0的输出波形将是TOUT0_DZ和nTOUT0_DZ。
nTOUT0_DZ 由TOUT1脚输出。
在死区间隔,TOUT0_DZ和nTOUT0_DZ将不会同时开启。
图7、死区使能后的输出波形DMA请求模式PWM定时器能在任何时间产生一个DMA请求。
定时器保持DMA请求信号(nDMA_REQ)为低直到定时器接收到ACK信号。
当定时器接收到ACK信号时,定时器将使请求信号无效。
产生DMA请求的定时器由设置DMA模式位(TCFG1)决定。
如果一个定时器配置成DMA请求模式,则此定时器将不能产生中断请求,而其它定时器将正常产生中断请求。
DMA模式配置和DMA/中断操作图8、定时器4的DMA模式操作PWM定时器专用寄存器定时器配置寄存器0(TCFG0)定时器输入时钟频率=PCLK/{预定标器的值+1}/分割器值预定标器值=0~255;分割器=2,4,8,16。
寄存器名称地址R/W 描述初始值TCFG0 0X51000000 R/W 配置2个8位预定标器0x0TCFG0 位描述初始值保留31:24 0x0死区长度23:16 这8位决定死区长度,一个死区长度的单位时间等于定时器0的单位时间长度0x0预定标器1 15:8 决定定时器2,3,4的预定标器值0x0 预定标器0 7:0 决定定时器0和1的预定标器值0x0定时器配置寄存器1(TCFG1)寄存器名称地址R/W 描述初始值TCFG1 0X51000004 R/W 分割器和DMA模式选择寄存器0x0TCFG1 位描述初始值保留31:24 00000000DMA模式23:20 选择DMA模式通道:0000=No select; 0001=Timer0; 0010=Timer1;0011=Timer2; 0100=Timer3; 0101=Timer4;0110=保0000留MUX4 19:16 选择PWM定时器4的MUX输入0000=1/2 0001=1/4 0010=1/8 0011=1/1601xx=TCLK10000MUX3 15:12 选择PWM定时器3的MUX输入0000=1/2 0001=1/4 0010=1/8 0011=1/1601xx=TCLK10000MUX2 11:8 选择PWM定时器2的MUX输入0000=1/2 0001=1/4 0010=1/8 0011=1/1601xx=TCLK10000MUX1 7:4 选择PWM定时器1的MUX输入0000=1/2 0001=1/4 0010=1/8 0011=1/1601xx=TCLK00000MUX0 3:0 选择PWM定时器0的MUX输入0000=1/2 0001=1/4 0010=1/8 0011=1/1601xx=TCLK00000定时器控制寄存器(TCON)寄存器名称地址R/W 描述初始值TCON 0X51000008 R/W 定时器控制寄存器0x0TCON 位描述初始值定时器4自动加载开关22决定定时器4的自动加载开关0=一次;1=自动加载定时器4手动更新位21决定定时器4的手动更新0=无操作;1=更新TCNTB4定时器4开关20决定定时器4的开与关0=停止;1=启动定时器4定时器3自动加载开关19决定定时器3的自动加载开关0=一次;1=自动加载定时器3输出逆变器开关18决定定时器3的输出逆变器开关0=逆变器关;1=逆变器开,改变TOUT3定时器3手动更新位17决定定时器3的手动更新0=无操作;1=更新TCNTB3&TCMPB3定时器3开关16决定定时器3的开与关0=停止;1=启动定时器3定时器2自动加载开关15决定定时器2的自动加载开关0=一次;1=自动加载定时器2输出逆变器开关14决定定时器2的输出逆变器开关0=逆变器关;1=逆变器开,改变TOUT2定时器2手动更新位13决定定时器2的手动更新0=无操作;1=更新TCNTB2&TCMPB2定时器2开关12决定定时器2的开与关0=停止;1=启动定时器2定时器1自动加载开关11决定定时器1的自动加载开关0=一次;1=自动加载定时器1输出逆变器开关10决定定时器1的输出逆变器开关0=逆变器关;1=逆变器开,改变TOUT1定时器1手动更新位9决定定时器1的手动更新0=无操作;1=更新TCNTB1&TCMPB1定时器1开关8决定定时器1的开与关0=停止;1=启动定时器1保留7:5死区使能 4 决定死区操作0=不使能;1=使能定时器0自动加载开关3决定定时器0的自动加载开关0=一次;1=自动加载定时器0输出逆变器开关2决定定时器0的输出逆变器开关0=逆变器关;1=逆变器开,改变TOUT0定时器0手动更新位1决定定时器0的手动更新0=无操作;1=更新TCNTB0&TCMPB0定时器0开关0决定定时器0的开与关0=停止;1=启动定时器1注:手动更新位需要在下一次写时清除定时器0计数缓冲寄存器&比较缓冲寄存器(TCNTB0/TCMPB0)寄存器名称地址R/W 描述初始值TCNTB0 0X5100000C R/W 定时器0的计数缓冲寄存器0x0 TCMPB0 0X51000010 R/W 定时器0的比较缓冲寄存器0x0TCMPB0 位描述初始值定时器0比较缓冲寄存器15:0 设置定时器0的比较缓冲寄存器值0x0TCNTB0 位描述初始值定时器0的计数缓冲寄存器15:0 设置定时器0的计数缓冲寄存器值0x0 定时器0计数观测寄存器(TCNTO0)寄存器名称地址R/W 描述初始值TCNTO0 0X51000014 R 定时器0的计数值观测寄存器0X0TCNTO0 位描述初始值定时器0观15:0 设置定时器0计数观测值0x0 测寄存器定时器1计数缓冲寄存器&比较缓冲寄存器(TCNTB1/TCMPB1)寄存器名称地址R/W 描述初始值TCNTB1 0X51000018 R/W 定时器1的计数缓冲寄存器0x0 TCMPB1 0X5100001C R/W 定时器1的比较缓冲寄存器0x0TCMPB1 位描述初始值定时器1比15:0 设置定时器1的比较缓冲寄存器值0x0 较缓冲寄存器TCNTB1 位描述初始值定时器1的15:0 设置定时器1的计数缓冲寄存器值0x0 计数缓冲寄存器定时器1计数观测寄存器(TCNTO1)寄存器名称地址R/W 描述初始值TCNTO1 0X51000020 R 定时器1的计数值观测寄存器0X0TCNTO1 位描述初始值定时器1观15:0 设置定时器1计数观测值0x0 测寄存器定时器2计数缓冲寄存器&比较缓冲寄存器(TCNTB2/TCMPB2)寄存器名称地址R/W 描述初始值TCNTB2 0X51000024 R/W 定时器2的计数缓冲寄存器0x0 TCMPB2 0X51000028 R/W 定时器2的比较缓冲寄存器0x0 TCMPB2 位描述初始值定时器2比15:0 设置定时器2的比较缓冲寄存器值0x0 较缓冲寄存器TCNTB2 位描述初始值定时器2的15:0 设置定时器2的计数缓冲寄存器值0x0 计数缓冲寄存器定时器2计数观测寄存器(TCNTO2)寄存器名称地址R/W 描述初始值TCNTO2 0X5100002C R 定时器2的计数值观测寄存器0X0TCNTO2 位描述初始值定时器2观15:0 设置定时器2计数观测值0x0 测寄存器定时器3计数缓冲寄存器&比较缓冲寄存器(TCNTB3/TCMPB3)寄存器名称地址R/W 描述初始值TCNTB3 0X51000030 R/W 定时器3的计数缓冲寄存器0x0 TCMPB3 0X51000034 R/W 定时器3的比较缓冲寄存器0x0 TCMPB3 位描述初始值定时器3比15:0 设置定时器3的比较缓冲寄存器值0x0 较缓冲寄存器TCNTB3 位描述初始值定时器3的15:0 设置定时器3的计数缓冲寄存器值0x0 计数缓冲寄存器定时器3计数观测寄存器(TCNTO3)寄存器名称地址R/W 描述初始值TCNTO3 0X51000038 R 定时器3的计数值观测寄存器0X0TCNTO3 位描述初始值定时器3观15:0 设置定时器3计数观测值0x0 测寄存器定时器4计数缓冲寄存器(TCNTB4)寄存器名称地址R/W 描述初始值TCNTB4 0X5100003C R/W 定时器4的计数缓冲寄存器0x0TCNTB4 位描述初始值定时器4的15:0 设置定时器4的计数缓冲寄存器值0x0 计数缓冲寄存器定时器4计数观测寄存器(TCNTO4)寄存器名称地址R/W 描述初始值TCNTO4 0X51000040 R 定时器4的计数值观测寄存器0X0TCNTO4 位描述初始值定时器4观15:0 设置定时器4计数观测值0x0 测寄存器。