基于车载激光点云数据的路面检测与重建
激光雷达在路面检测中的应用研究

激光雷达在路面检测中的应用研究激光雷达已经成为了众多领域中不可或缺的技术,其中包括车辆自动驾驶领域。
自动驾驶需要对路况进行高效准确的识别与判断,而其中路面状态是必须要考虑的一个因素。
而随着激光雷达技术的不断进步,越来越多的研究人员认为激光雷达能够提供一种高效准确的路面检测方法。
一、激光雷达检测路面的原理激光雷达是利用光脉冲方法对物体进行探测和测距的技术。
从本质上来看,激光雷达和常见的雷达具有相似的原理,即都是利用物体反射回来的信号来获得关于物体位置和特征等信息。
激光雷达能够实现的最小探测距离是几个米到几百米范围。
激光雷达通过发射激光,并记录激光从发射到接收所需的时间,根据光速计算出物体与激光雷达之间的距离。
激光雷达通过采集反射激光的强度、时间和方向等数据,可以获得关于被测物体的三维空间点云信息。
在道路检测中,激光雷达能够实现对路面高程、坡度和形态等数据的获取,从而为后续的路面状态评估和道路设计等工作提供有效的数据支持。
二、激光雷达在路面检测中的应用激光雷达在路面检测中的应用主要包括道路面形态检测、路面高程检测、路面坡度检测和路面结构检测等方面。
其中,激光雷达技术在数字地图建立、车辆行驶定位和反作弊等领域也有着广泛的应用。
1、道路面形态检测道路面形态指的是道路表面的平整程度。
平整的路面对于车辆驾驶的稳定性和行驶安全性有着重要作用。
激光雷达被广泛应用于道路表面的平整度检测方面,在道路施工、道路维修和工程验收等方面具有较为重要的作用。
采用激光雷达技术检测道路面形态,可以快速高效地获得路面平整度数据。
激光雷达在对路面进行扫描的过程中,能够高精度地记录下路面每个小区域的坡度和高程等信息。
通过这些数据可以构建出路面形态的高度图,进而反映出道路表面的平整度。
这种方法不仅大大降低了道路检测的难度和工期,同时也提高了检测精度和效率。
2、路面高程检测路面高程是指道路表面相对平面的高低程度,通过路面高程数据可以有效评估和判断道路表面的平整性。
车载激光点云数据精度分析方法课件

点间距精度评估
总结词
点间距精度评估是衡量点云数据中相 邻点之间距离的精度,是评估点云数 据质量的重要指标之一。
详细描述
点间距精度评估采用统计方法,计算 点云数据中相邻点之间的距离与实际 距离之间的偏差。偏差越小,点间距 精度越高,点云数据质量越好。
角度精度评估
总结词
角度精度评估是衡量点云数据中角度信息的精度,用于评估点云数据的方向和角 度准确性。
详细描述
角度精度评估采用统计方法,计算点云数据中相邻点之间的角度与实际角度之间 的偏差。偏差越小,角度精度越高,点云数据质量越好。
04
车载激光点云数据精度提 升方法
数据采集设备优化
01
02
03
设备校准
对车载激光雷达进行精确 校准,确保其测距和角度 测量精度。
传感器标定
定期对传感器进行标定, 以修正因环境因素(如温 度、湿度)导致的测量误 差。
探索车载激光点云数据在自动 驾驶、智能交通等领域的应用 ,以推动相关技术的进一步发 展和普及。
THANKS
感谢观看
数据预处理是提高车载激光点云数据 精度的关键步骤,包括去噪、滤波、 拼接等操作。
滤波主要是平滑点云数据中的噪声, 常用的滤波算法有高斯滤波、中值滤 波等。
去噪主要是去除点云数据中的离群点 ,可以使用统计方法或基于网格的方 法进行去噪。
拼接是将多个不同视角的点云数据进 行对齐,常用的拼接算法有基于特征 的拼接和基于ICP(迭代最近点)的 拼接。
案例三:森林环境数据精度分析
总结词
森林环境数据精度分析是车载激光点云数据 精度分析的重要应用之一,主要关注森林植 被的种类、高度、密度等要素的辨认和分类 精度。
详细描述
移动车载激光点云的道路标线自动识别与提取

( i nIfr t nT cnq e nt ueo u vyn n a pn , i n7 05 , hn ) X nomai eh iu s tt f reiga dM p ig X 10 4 C ia a o I i S a
A bsr c t a t:Th e e r h fc e n Li e r s ac o us s o DAR o n lu fr a ura e a q ie r m e c e— b r e mo l p i g s se — L nd p i tco dso o d s f c c u r d fo v hil o n bie ma p n y tm a —
邹晓亮 ,缪 剑 ,郭锐增 ,李星全 ,赵桂 华
( 西安测绘总站 , 陕西 两安 70 5 ) 1 04
摘
要 : 移动车载激光测量 LnM r 对 ad ak系统 获取 的路 面 激 光 点 云数 据进 行 研 究 , 结合 激 光 点 云 的 回 波反 射 率 、 扫
描角, 以及 量 测 距 离等 特 征 信 息 与 道 路 标 线 的 属 性 信 息 , 出 了 一 种 基 于 车 载 激 光 点 云 的 道路 标 线 自动 识 别 与 提
Ma k r .An a t mai o d mak n ee t n a d e t cin meh d i p o o e .C mb n n i u o t r a r i gd t ci n xr t t o s r p s d c o a o o i i g L DAR fa u e f er ,a g ea d dsa c t r so t e r o n l n itn e
提取 算法。从 点云 中提取 道路 标线 , 采用 最小二乘 线性最优 拟合 算法对提取 的标 线点云进 行拟合 , 生成道路 标 线的 C D轮廓 线 , A 实现 道路 标线的 自动化识别 。以移动 车载 L nMa ad r k系统的 Sc i k激光扫描仪 获取 的路 面激光
机载三维激光雷达技术在道路测量中的应用

中国新技术新产品2021 NO.10(下)- 114 -工 程 技 术0 引言近些年来,我国在道路基础设施方面的需求逐步增加,快速扩大道路建设的规模是当前基础设施建设的重中之重。
与此同时,在道路工程建设过程中,不仅对道路测绘成果资料的准确性要求不断提高,对成果提供的实效性也提出了更高的要求。
传统的道路测绘方法耗时耗力,对树木茂密的山地或密集住宅等测区更是无从下手。
近年来,三维激光扫描技术的快速发展为解决这一难题提供了新的思路。
机载三维激光雷达系统(Light Detection And Ranging,LIDAR),是当前测绘行业中较为前沿的科技之一,具备实时测绘、非接触测绘、较高测绘效率等特点,在测绘领域得到了广泛的应用,并成为一种能够快速、准确获取空间信息的测绘技术手段[1]。
该文针对机载三维激光雷达技术及其应用现状进行分析,发现该技术应用于道路测绘方面时,能够快速、有效地获取高精度的地面点数据,为道路设计工作提供大量、精确的数据,同时能够保证测量数据的精确性和时效性,进而确保道路规划设计方案的合理实施。
鉴于此,该文重点研究机载三维激光雷达技术在道路工程测量中的具体应用。
1 机载三维激光雷达测量系统1.1 机载三维激光雷达技术LIDAR技术作为近些年发展起来的一种新型的空间信息采集技术,其通过发射高频率激光脉冲,完成对目标区域内所包括的地物进行扫描,从而获取海量的包括地面信息的点云数据。
不仅能够表达目标物体的三维信息还包括了几何结构、弱纹理等信息。
激光雷达系统根据搭载平台的不同可分为星载、机载、车载和地面4类,其中机载激光雷达应用最广泛[2]。
机载三维激光雷达测量系统整合了LIDAR技术、全球定位系统(GPS)以及惯性测量技术(IMU),以无人机作为搭载平台,能够准确、快速地采集具备高精度特点的地面地形数据。
机载三维激光雷达测量系统获取的点云数据同时具有精度高、海量、效率高等特点且采集工作受天气、太阳等自然条件影响较小。
基于车载LiDAR系统的路面高程测量研究
收 稿 日期 :2 0 1 3—0 3— 2 0
作 者 简 介 :张 传 帅 ( 1 9 8 7 一) , 男, 河 南 镇 平人 , 助理工程师 , 河 南理 工
l 型的点云绝对定 向 l
高程成果表
● ●__ ●__ ●●___ _____ _____ — —
I
恒卿
,
D A R系统 能 够 获 得 高 精 度 坐 标 信 息 的重 要 保 证 。 与单 独 的 I MU或 G P S相 比 , 组合 导航 系统 中 的 G P S 能 够提 供高精 度 和稳 定 的位 置 信 息 , 同 时连 续 检 测 I MU的系统漂 移 , 而I MU可 以提 供 连 续 的 姿 态 角 ,
弥补 G P S因信号 中断 引起 的无 法定 位 问 题 , 两者 实
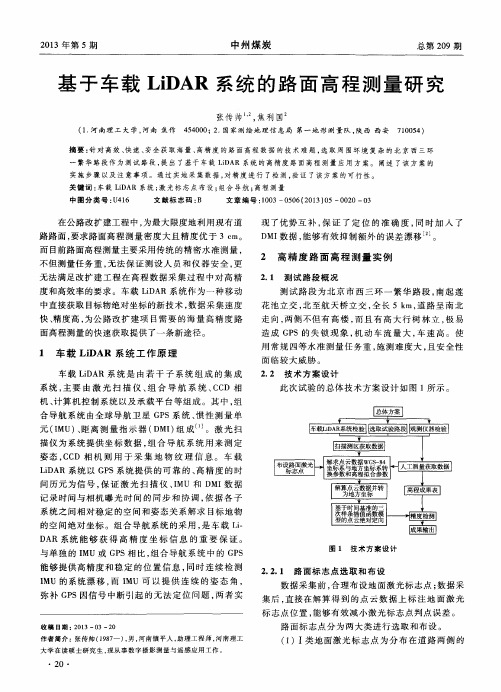
图 1 技 术 方 案 设 计
2 . 2 . 1 路面标 志点 选取和 布设
数据采 集前 , 合理 布设地 面激 光标 志点 ; 数 据采
集后 , 直接 在解算 得 到 的 点云 数 据 上标 注 地 面激 光 标 志点位 置 , 能 够有效 减小激 光标 志点判 点误 差 。 路 面标 志点分为 两大类 进行选 取 和布设 。 ( 1 )I 类 地 面激光 标 志点 为分 布 在道 路 两侧 的
2 高 精 度 路 面 高 程 测 量 实例
2 . 1 测 试 路 段 概 况
无 法满足改扩 建工程 在 高程数 据采 集过 程 中对 高精 度和高效率 的要 求 。车载 L i D A R系统作 为一 种移 动
中直接获取 目标 物绝对坐标 的新技 术 , 数据 采集速度
测试 路 段 为北 京 市西 三环 一 繁华 路 段 , 南起 莲
车载激光雷达点云数据处理关键技术
计算机测量与控制.2022.30(1) 犆狅犿狆狌狋犲狉犕犲犪狊狌狉犲犿犲狀狋牔犆狅狀狋狉狅犾 ·234 ·收稿日期:20211103; 修回日期:20211210。
基金项目:山西省回国留学人员科研资助项目(2017-091)。
作者简介:党亚南(1998),女,山西忻州人,硕士研究生,主要从事图像处理与计算成像方向的研究。
引用格式:党亚南,田照星,郭利强.车载激光雷达点云数据处理关键技术[J].计算机测量与控制,2022,30(1):234238,245.文章编号:16714598(2022)01023405 DOI:10.16526/j.cnki.11-4762/tp.2022.01.036 中图分类号:TN249文献标识码:A车载激光雷达点云数据处理关键技术党亚南,田照星,郭利强(中北大学信息与通信工程学院,太原 030051)摘要:激光雷达具有探测精度高、穿透能力强、能够三维成像等诸多优点,故自动驾驶车辆常常搭载激光雷达来对车身周围环境进行感知;车辆实现自动驾驶的关键技术包括车载激光雷达信号的发射、接收和对点云数据的处理,通过对接收到的点云数据进行处理可以使车辆准确的感知到当前路面状况并做出相应操作;文章重点介绍了车载激光雷达点云数据处理中的关键技术,对每个关键技术中常用算法的基本原理、优缺点和改进等进行了阐述,以期为车载激光雷达点云数据处理提供参考。
关键词:自动驾驶;激光雷达;点云数据;数据处理;目标识别犓犲狔犜犲犮犺狀狅犾狅犵狔狅犳犞犲犺犻犮犾犲犔犻犱犪狉犘狅犻狀狋犆犾狅狌犱犇犪狋犪犘狉狅犮犲狊狊犻狀犵DANGYanan,TIANZhaoxing,GUOLiqiang(SchoolofInformationandCommunicationEngineering,NorthUniversityofChina,Taiyuan 030051,China)犃犫狊狋狉犪犮狋:Lidarhasmanyadvantagessuchashighdetectionaccuracy,strongpenetratingability,andthree-di mensionalimagingcapability.Therefore,AutonomousvehicleareoftenequippedwithLidartoperceivethesurround ingenvironmentofthevehiclebody.ThekeytechnologiesofAutonomousvehicleincludetransmittingandreceivinglidarsignalandprocessingpointclouddata.thevehiclecanaccuratelyperceivethecurrentroadconditionsandmakecorrespondingoperations.Thispapermainlyintroducesthekeytechnologiesinpointclouddataprocessingofvehiclelidar,andexpoundsthebasicprinciples,advantagesanddisadvantagesandimprovementsofcommonalgorithmsineachkeytechnology.inordertoprovideareferenceforpointclouddataprocessingofvehicle-mountedlidar.犓犲狔狑狅狉犱狊:Autonomousdriving;Laserradar;Pointclouddata;Dataprocessing;Targetrecognition0 引言随着自动化技术与人工智能技术的相互融合快速发展,自动驾驶车辆应运而生,它可以减少因人为原因导致的交通事故,也可以为残疾人、行动不便老年人等提供开车的权力,人工智能合理的路径规划也可以节约驾驶时间。
基于激光雷达数据的路面状况检测算法研究
基于激光雷达数据的路面状况检测算法研究随着交通工具的不断增加和道路的日渐庞大,如何保证道路的安全性成为了一个重要的话题。
道路状况是保证我们的交通安全的基础之一,但是由于道路状况的多样化,传统检测方式往往无法满足检测要求,因此需要一种有效的方式来解决这个问题。
这篇文章就是要介绍基于激光雷达数据的路面状况检测算法。
激光雷达技术是一种通过激光束扫描物体进行测距、测量和成像的技术。
由于其高精度、高速度和高分辨率的优势,激光雷达被广泛应用于自动驾驶、机器人、测绘等领域。
对于道路状况检测而言,激光雷达具有天然的优势。
在道路状况检测中,我们需要对路面的起伏、波动进行测量,以判断路面的平整度和安全性。
传统的测量方式往往采用摄像头或传感器进行测量,但这种方法是比较昂贵的,而且由于路面的颜色、光照等因素的干扰,很难得到精确的测量结果。
相反,激光雷达可以精确地测量出路面的高度,无论是光亮还是暗淡的路面,都能够准确识别。
在激光雷达数据处理中,我们需要先对激光雷达进行校准,以消除传感器本身的误差。
然后,我们需要对激光雷达进行数据处理,以提取路面的特征。
通常我们会使用点云数据对路面进行建模,然后根据点云数据的密度和高度来判断路面的平整度和安全性。
这种方法的好处是可以快速处理大量的数据,并且可以得到非常精确的测量结果,但是缺点是需要根据实际情况进行参数的选择和调整,否则可能会影响到测量结果的准确性。
同时,建模过程中也需要考虑一些实际问题,如采样点数、采样的密度等,这些都会影响到后续的数据处理和分析。
对于路面状况检测来说,我们还需要进行路面分类。
路面分类是指将路面划分为不同的类别,如平直路面、坑洼路面、断面变化路面等。
这个过程需要对点云数据进行特征提取和分类,以便进行后续的处理和分析。
目前常用的特征提取方式有形状特征、表面法线特征等,而分类方法则主要分为有监督和无监督两种。
有监督的方法需要预先定义好不同类别的特征,然后利用训练数据训练分类器,以便对未知数据进行分类。
基于激光雷达的道路状况检测与评估方法

基于激光雷达的道路状况检测与评估方法激光雷达是一种通过发射激光束并接收其反射信号来获取目标精确三维位置信息的传感器。
随着自动驾驶技术的快速发展,激光雷达逐渐成为识别和感知环境的重要设备之一。
基于激光雷达的道路状况检测与评估方法,对于实现自动驾驶、提升交通安全以及优化道路维护具有重要意义。
在道路状况检测与评估中,激光雷达能够精确地探测和识别道路上的不平整、裂缝、障碍物等问题。
其工作原理是通过发射短脉冲的激光束,激光束在与周围环境发生反射时会被接收器接收,从而形成目标物体的反射信号。
通过计算激光束的传播时间和反射信号的回波强度,可以获得道路上各个点的精确坐标和特征信息。
首先,为了实现道路状况检测与评估,需要对激光雷达获取的原始数据进行预处理。
预处理包括数据去噪、滤波和分割等步骤,旨在提取有效的道路特征信息并降低数据噪声的干扰。
例如,采用高斯滤波器可以有效地平滑激光点云数据,消除随机噪声。
而基于聚类算法,如DBSCAN、K-means等,可以将点云数据进行有效分割,以提取出道路上的点云簇。
其次,利用提取到的道路点云簇,可以通过拟合曲线或平面模型来对道路的几何形状进行建模和描述。
这些模型可以提供道路的几何参数,例如坡度、曲率等。
通过计算这些参数,可以评估道路的平整性和曲率变化程度。
同时,还可以利用这些模型对道路的裂缝、洼坑等缺陷进行检测和分析,为道路维护提供参考决策。
此外,激光雷达还可以进行道路表面质量评估。
通过计算激光点云数据的密度和分布,可以分析道路表面的均匀性和平整度。
通过这些指标的评估,可以了解道路的平均损伤程度,有助于确定道路的维护优先级和计划。
最后,在道路状况检测与评估中,采用激光雷达还可以进行障碍物检测和识别。
激光雷达可以获取道路上的障碍物点云数据,通过建立障碍物检测算法,可以实现对道路上行驶的车辆、行人等障碍物的精确识别和跟踪。
这对于自动驾驶和交通安全至关重要。
综上所述,基于激光雷达的道路状况检测与评估方法在自动驾驶、交通安全和路面维护等领域有着广泛的应用前景。
基于激光雷达点云的路面破损检测方法
基于激光雷达点云的路面破损检测方法随着城市化进程的不断加快,道路建设也在持续进行中。
然而,长时间的使用和不可避免的自然磨损使得道路出现了各种破损问题,如裂缝、坑洞等。
这些路面破损不仅给驾驶者带来不便,还会增加车辆的损耗和行驶的危险性。
因此,及时准确地检测和修复路面破损是道路维护的重要环节。
基于激光雷达点云的路面破损检测方法是一种利用激光雷达技术获取道路表面点云数据,并通过分析处理这些数据来检测路面破损的方法。
首先,通过激光雷达扫描道路表面,可以获取大量的点云数据。
这些数据包含了道路表面的高度信息,可以反映出路面的几何形状。
然后,通过对点云数据进行预处理,如去除离群点、滤波等,可以进一步提取出路面的特征信息。
接下来,针对路面破损的特点,可以采用不同的算法进行检测。
例如,对于裂缝的检测,可以通过分析点云数据中的间隙和不连续性来判断是否存在裂缝。
而对于坑洞的检测,则可以通过分析点云数据中的高度变化来判断是否存在坑洞。
同时,还可以结合其他传感器数据,如摄像头图像和惯性测量单元数据,来提高检测的准确性和可靠性。
最后,根据检测结果,可以生成路面破损的报告,并及时进行修复。
修复可以采用传统的路面维护方法,如填充、铺设新的路面等,也可以利用先进的材料和技术,如冷补材料和微波加热修补等。
基于激光雷达点云的路面破损检测方法具有快速、高效、准确的特点。
通过利用激光雷达技术,可以实现对道路破损的自动化检测,减少人力投入和检测时间,提高道路维护的效率和质量。
同时,该方法还可以为道路管理部门提供实时的路面状况信息,帮助他们制定合理的维护计划和优化资源配置。
总之,基于激光雷达点云的路面破损检测方法是一种应用激光雷达技术进行道路维护的先进方法。
通过该方法,可以实现对道路破损的快速、准确的检测,为道路管理和维护提供有效的支持。
这将进一步提高道路的安全性和舒适性,为人们的出行提供更好的保障。
浅析路基路面弯沉的检测技术
浅析路基路面弯沉的检测技术路基路面的弯沉是指由于车辆荷载和自然环境等因素引起的路面变形和下沉现象。
这种现象不仅会影响行车安全和舒适性,还会对路面结构和材料造成损害,因此对路基路面的弯沉进行及时准确的检测显得尤为重要。
本文将对当前常用的路基路面弯沉检测技术进行浅析,希望能为相关技术的研究和应用提供一些参考。
一、静地面激光扫描技术静地面激光扫描技术是一种利用激光雷达器进行高精度、无接触式地面形貌测量的技术。
在进行路基路面弯沉检测时,激光雷达器通过扫描路面,采集路面的三维点云数据,然后通过对点云数据进行处理,计算出路面的高程,从而对路基路面的弯沉情况进行分析。
静地面激光扫描技术具有高精度、高效率、无接触等优点,能够实现对路基路面弯沉情况的精确检测,特别适用于对大面积路面进行快速准确的检测。
激光扫描技术还可以实现对路面病害、裂缝等问题进行全面的检测和分析,为路面维护和管理提供了便利。
静地面激光扫描技术也存在一些不足之处,比如设备成本高、操作复杂、受天气等外界因素影响等。
因此在实际应用中需要综合考虑技术优势和局限性,选择合适的场景和环境进行应用。
二、动态车辆振动检测技术动态车辆振动检测技术是一种利用车辆振动响应来进行路面弯沉检测的技术。
通过在路面上布设振动传感器,监测通过车辆的振动信号,然后通过信号处理技术分析得出路面的弯沉情况。
动态车辆振动检测技术具有实时性强、成本低廉等优点,能够实现对路面弯沉情况的快速检测。
该技术还可以实现对路面的动态荷载响应进行实时监测,对路面结构的变形和破坏情况提供准确的数据。
动态车辆振动检测技术也存在一些局限性,比如受到车辆类型和速度等因素的影响,对路面弯沉的检测精度可能不高。
在实际应用中需要进行精细化的数据处理和分析,以提高检测的准确性和可靠性。
三、卫星遥感技术卫星遥感技术是一种利用卫星对地面进行远程感知和监测的技术。
在路基路面弯沉检测中,可以通过卫星遥感技术获取路面的高程和形貌信息,从而对路面弯沉情况进行分析和评估。
车载移动测量技术在道路全息测绘中的应用

车载移动测量技术在道路全息测绘中的应用摘要:车载移动测量技术作为一种创新的测量方法,正逐渐成为道路全息测绘领域的重要组成部分。
本文旨在探讨车载移动测量技术在道路全息测绘中的应用,着重探讨它在动态监测道路状态、支持智慧城市交通规划与管理、提供自动驾驶系统的数据支持等方面的优势和作用。
随着车载移动测量技术的不断完善和应用,相信将为构建更智慧、高效的城市交通系统带来新的发展机遇。
关键词:车载移动测量技术;道路全息测绘;应用在道路全息测绘领域,车载移动测量技术的应用正日益受到广泛重视。
随着交通网络和城市规模的不断扩大,对道路信息的高效获取和精确记录成为一项迫切需求。
本文旨在探讨车载移动测量技术在道路全息测绘中的重要作用,以及它为智慧城市和交通管理带来的巨大潜力。
一、车载移动测量技术的优势(一)实时性车载移动测量技术以其快速响应和实时数据采集的特点,成为道路全息测绘中的重要工具。
传统的测量方法可能需要较长的时间,包括人工测量和静态传感器的部署,而车载移动测量技术可以在车辆行驶的同时实时获取数据。
这种实时性使得交通监控和实时路况分析成为可能,从而为交通管理和智慧城市提供了高效支持。
通过及时获取交通拥堵信息,交通管理者可以迅速做出调整和优化交通流量,提高交通系统的整体效率。
(二)高效性相比传统的测量方法,车载设备能够在较短的时间内收集大量数据。
传感器的集成和数据处理算法的优化使得数据获取和处理的效率大大提升。
这种高效性不仅节省了时间和人力成本,还为更频繁、更全面的测量提供了可能。
通过快速获取道路信息,交通规划者可以更快速地进行交通规划和调整,为城市交通的发展提供及时的决策依据。
(三)非侵入性车载移动测量技术的数据采集过程对道路和交通的正常运行几乎没有干扰,具有非侵入性。
相比于传统的道路测量方法,如人工测量或静态传感器布设,车载移动测量技术不需要设置额外的设备或关闭道路,从而避免了对交通运行的影响。
这种非侵入性使得数据的获取更加安全可靠,能够持续地对交通状态进行监测,为交通管理提供更全面的信息。
路面形变监测技术在测绘中的应用

路面形变监测技术在测绘中的应用随着城市化进程的加快,城市道路的建设和维护变得越来越重要。
而路面的形变问题一直是道路安全的重要隐患之一。
为了及时发现路面形变问题并采取相应措施,路面形变监测技术在测绘中得到了广泛应用。
一、路面形变对道路安全的影响首先,路面形变对车辆行驶安全产生直接影响。
当路面出现凸起、坑洞等形变问题时,车辆在行驶过程中容易发生颠簸和转向困难,增加了车辆的操作难度,降低了行驶的舒适性和稳定性,进而增加了交通事故的发生率。
其次,路面形变还对行人的安全构成潜在威胁。
不平整的路面容易导致行人摔倒,特别是对于老年人、儿童和行动不便的人来说更为危险。
最后,路面形变问题还可能导致道路设施损坏、排水不畅等问题。
比如,当路面出现坑洞时,雨水容易积聚在凹陷处,进而影响道路排水系统的正常工作,加重了交通拥堵问题。
二、路面形变监测技术的原理和方法1. 激光扫描技术激光扫描技术是一种非接触式的测量技术,可以精确地测量路面的高程信息。
通过仪器发射激光束并记录反射回来的激光波,可以获取道路表面的点云数据。
通过对点云数据进行处理和分析,可以获得路面形变的相关信息。
2. 红外测温技术红外测温技术可以通过测量路面表面的温度变化来间接推断路面的形变情况。
由于路面形变会导致局部热量的积聚或散失不均,因此通过红外测温仪器可以检测到这种温度变化。
3. GPS监测技术GPS监测技术通过在道路表面安装GPS传感器,记录车辆行驶过程中的坐标信息,并将其与参考坐标系统进行对比分析。
通过对监测数据的处理和分析,可以获取道路形变的相关信息。
三、1. 道路巡检利用路面形变监测技术可以实现对城市道路进行定期巡检和状态评估。
可以通过激光扫描技术获取路面的三维点云数据,分析路面的高程、坡度等指标,判断路面的平整度和结构稳定性,及时发现和修补路面问题,提高道路的使用寿命和安全性。
2. 智能驾驶在智能驾驶领域,路面形变监测技术可以帮助车辆实时感知路面状态,并做出相应的驾驶决策。
测绘技术中的道路病害检测方法介绍
测绘技术中的道路病害检测方法介绍现代城市道路建设与维护中的道路病害检测方法发挥着重要的作用。
测绘技术在此方面扮演着关键的角色,能够精确快速地检测和评估道路病害。
本文将介绍几种常见的测绘技术在道路病害检测中的应用。
一、激光扫描测绘技术激光扫描测绘技术是一种基于激光雷达的高精度测量方法。
它通过发射激光束并记录返回的反射信号来获取地面、建筑物等物体的点云数据。
在道路病害检测中,激光扫描技术可以快速获取道路表面的形貌和几何特征。
通过分析点云数据,可以检测到路面的裂缝、坑洼等病害。
二、摄影测量技术摄影测量技术利用摄影设备获取道路表面的图像数据,并通过图像处理和测量方法获取地物的几何信息和病害数据。
在道路病害检测中,摄影测量技术可以通过拍摄道路表面的图像,利用图像处理算法分析病害特征,如裂缝的长度、宽度、分布情况等。
同时,摄影测量技术也可以结合地理信息系统(GIS)进行道路病害的空间分析和管理。
三、雷达测量技术雷达测量技术是一种利用雷达波束获取目标物体的位置和形状信息的方法。
在道路病害检测中,雷达测量技术可以通过发射雷达波束,获取道路表面的高程数据。
通过分析高程数据,可以检测到路面的起伏、凹凸等病害。
同时,雷达测量技术还可以通过波束扫描的方式获取道路病害的二维和三维分布情况,为道路维护提供更全面的信息。
四、红外热像测量技术红外热像测量技术是利用红外热像仪获取目标物体的表面温度分布信息的方法。
在道路病害检测中,红外热像测量技术可以通过扫描道路表面并记录红外辐射信号来获取道路表面的温度分布情况。
由于道路病害往往会导致局部温度异常,通过分析红外图像可以检测到路面的裂缝、边坡滑动等病害。
综上所述,测绘技术在道路病害检测中发挥着重要作用。
通过激光扫描、摄影测量、雷达测量和红外热像技术等方法,可以快速准确地获取道路病害的信息,为道路维护提供科学依据。
随着技术的不断发展,测绘技术在道路病害检测中的应用将会更加广泛和深入。
车载激光点云技术在道路及交通设施管理上的研究与应用

车载激光点云技术在道路及交通设施管理上的研究与应用2:深圳高速工程顾问有限公司广东深圳摘要:车载激光点云技术在实际应用的过程中能够通过智能建模、云数据处理、地物自动提取等技术,对道路的模型以及道路周边交通设施信息进行收集,为道路与交通设施管理工作提供相应的数据支持。
关键词:车载激光点云技术;道路管理;交通设施管理引言:交通是社会发展过程中研究的重点工作,而伴随着我国的发展,我国也将更多的新技术应用于道路与交通设施管理工作中。
车载激光点云技术便是其中的重点发展技术之一。
本文将对车载激光点云技术在道路以及交通设施管理工作中的作用进行分析。
1.车载激光点云的研究内容交通质量是决定一个地区发展质量的重要因素,而伴随着时代的发展,人们对于交通质量的要求也在不断的提升。
在信息化时代的影响下,车载激光点云技术手段也应用于道路与交通设施管理工作中,为人们提供丰富的道路与交通设施信息与数据,极大程度的提升道路与交通设施的管理质量[1]。
现阶段,车载激光点云技术在应用的过程中主要研究以下几个方面的内容。
(一)智能建模首先,激光点云技术在应用的过程中需要获取激光点云与相机在同一时刻同一位置所获取的信息,之后,依靠所获取的信息,确定其所对应的像素以及空间位置等。
最后,将带有信息的点云数据进行处理,实现数据的可视化显示,自动分类以及智能建模等。
(二)云数据预处理在获取相关的信息后,对数据进行整理、转化、分析等,实现数据的分类,将目标的信息与其他的信息进行分组,提升信息的针对性。
(三)地物自动提取地物自动提取是激光点云技术所研究的重点工程。
其在应用的过程中能够对周边的信息进行准确的分析与判断,获取周边地区的建筑立面、线杆、指示灯等各种数据。
1.车载激光点云在道路及交通设施管理中的应用车载激光点云技术用于道路以及交通设施管理工作中的主要对周边的信息进行收集与处理,从而为我国的道路与交通设施管理提供一定的数据支持。
车载激光点云技术在应用的过程中主要是通过以下几个方面进行信息的收集与整理工作。
激光点云构建路面方程

激光点云构建路面方程
激光点云是一种通过激光扫描仪获取的三维点云数据,它具有高精度和高密度的特点。
在道路建设和车辆导航等领域,通过激光点云构建路面方程是非常重要的一项任务。
构建路面方程的过程可以分为三个步骤:数据采集、数据预处理和方程拟合。
首先,我们需要使用激光扫描仪对道路进行扫描,获取大量的点云数据。
这些点云数据记录了道路表面的各个点的坐标信息。
在数据预处理阶段,我们需要对采集到的点云数据进行滤波和去噪处理,以去除由于传感器误差或环境干扰引起的噪声点。
然后,我们可以通过对点云数据进行分割和聚类,将道路点云与其他物体点云进行区分。
接下来,我们需要根据预处理后的点云数据拟合路面方程。
常用的方法是使用最小二乘法进行拟合,通过寻找最小化残差的参数来确定路面方程的系数。
拟合的路面方程可以表示为:z = ax + by + c,其中a、b和c分别表示平面方程的系数。
构建路面方程后,我们可以利用它进行道路分析和车辆导航。
例如,可以通过计算车辆相对于路面的高度差来判断车辆是否偏离了道路中心线,从而实现车道偏离预警功能。
此外,还可以根据路面方程来进行道路平整度评估,从而提供道路维护和修复的参考依据。
总的来说,通过激光点云构建路面方程是一项重要的技术,它可以为道路建设和车辆导航等领域提供精确的路面信息。
随着激光扫描仪和数据处理算法的不断发展,我们相信在未来会有更多的创新和应用。
机载激光雷达扫描技术在高速公路改扩建中的应用

机载激光雷达扫描技术在高速公路改扩建中的应用摘要:随着我国经济的快速发展,高速公路改扩建成为了一项重要的基础设施建设工程。
在高速公路改扩建过程中,需要对现有道路进行全面的勘测和评估,以确定改建的方案和施工的可行性。
传统的勘测方法存在效率低、成本高等问题。
本文介绍了机载激光雷达扫描技术及其在高速公路改扩建中的应用。
一、引言传统的勘测方法主要包括地面测量和航测等。
地面测量是指在对地面进行现场测量的基础上,通过测量仪器获取地形、地貌、地表覆盖等信息。
航测是指利用航空器进行测量,通过航摄技术获取地形、地貌等信息。
这些传统的勘测方法存在效率低、成本高等问题。
二、机载激光雷达扫描技术的原理和特点机载激光雷达扫描技术是一种非接触式、快速、高精度的勘测方法,主要包括地形激光雷达(LiDAR)和激光雷达扫描系统(LSS)两种技术。
地形激光雷达是通过激光雷达扫描系统采集地形信息,并利用地面控制点进行精确校正,得到地形三维模型的技术。
它可以快速获取大范围的地形数据,准确测量地表和地物的高程、坡度、坡向等参数,可以有效分析地质灾害隐患,为高速公路改扩建提供重要的参考资料。
激光雷达扫描系统是通过激光雷达扫描仪将连续的激光束投射到地面上,接收反射回来的激光信号,并通过计算反射时间和激光束的参数,得到地面地物的三维坐标信息。
它可以快速获取大范围的地面地物的三维坐标信息,准确测量地物的位置、形状等参数,可以实现对高速公路周边环境的立体化分析和模拟。
机载激光雷达扫描技术具有测量速度快、测量精度高、数据获取范围广等特点,可以大大提高勘测效率,降低勘测成本。
1. 高速公路线路选址:机载激光雷达扫描技术可以获取大范围的地形和地物信息,帮助确定高速公路的线路选址,并分析线路的可行性。
2. 环境影响评估:机载激光雷达扫描技术可以获取高精度的地面地物信息,分析高速公路周边环境的立体化特征,评估高速公路改扩建对环境的影响。
3. 施工可行性评估:机载激光雷达扫描技术可以获取地表地物的三维坐标信息,帮助评估高速公路改扩建方案的施工可行性,预测施工过程中的挖填量、坡度等参数。
基于车载激光雷达点云数据的预处理研究

基于车载激光雷达点云数据的预处理研究
韩松魁;于正林
【期刊名称】《长春理工大学学报(自然科学版)》
【年(卷),期】2024(47)1
【摘要】随着人们对数字化城市的探索以及点云数据获取方式飞速的发展,点云已成为继二维栅格的影像数据和结构化的矢量地图数据后的第三类空间数据,具有最接近物理世界刻画的数据表征能力。
点云数据的预处理包含点云下采样、点云去噪和点云滤波等,点云预处理是后续进行点云分割、三维重建等操作的关键步骤。
以车载激光雷达点云数据为研究内容,提出布料模拟滤波算法对车载点云数据进行滤波操作,并与数字形态学滤波和坡度值滤波进行对比,结果表明布料模拟滤波算法的Ⅱ类误差在10%以内,要小于其余两种算法,且参数设置较为简单,更有利于点云归一化。
【总页数】7页(P85-91)
【作者】韩松魁;于正林
【作者单位】长春理工大学机电工程学院
【正文语种】中文
【中图分类】TP751
【相关文献】
1.基于车载三维激光雷达的玉米点云数据滤波算法
2.基于无人机激光雷达点云数据的单木分割研究
3.基于地面激光雷达点云数据的森林树木分布模式提取研究
4.基于无人机载激光雷达点云数据的人工侧柏林单木分割研究
因版权原因,仅展示原文概要,查看原文内容请购买。
机载激光雷达扫描技术在高速公路改扩建中的应用

机载激光雷达扫描技术在高速公路改扩建中的应用随着城市化进程的推进,以及人们生活水平的提高,交通拥堵成为了人们日常生活中的一大困扰。
为了解决交通拥堵问题,许多城市都进行了高速公路的改扩建工程。
而在这个过程中,机载激光雷达扫描技术正发挥着越来越重要的作用。
机载激光雷达扫描技术是一种高精度的测绘技术,它利用激光雷达器发射激光束,然后测量被激光束所击中的目标物体,通过对激光束的反射和散射进行分析,可以获取目标物体的位置、形状和表面特性等信息。
这种技术具有高精度、高效率、非接触性和适应性强等特点,因此在高速公路改扩建工程中具有广泛的应用前景。
机载激光雷达扫描技术可以对道路和周边环境进行高精度的测量和建模。
在高速公路改扩建工程中,需要对道路、桥梁、隧道、边坡等进行精准的测量和建模,以便确定改扩建的范围和设计方案。
传统的测量方法需要大量的人力和时间,而且存在一定的误差。
而机载激光雷达扫描技术可以通过快速、连续、高精度的测量,准确获取道路和周边环境的三维信息,为改扩建工程提供可靠的数据基础。
机载激光雷达扫描技术可以实时监测施工过程中的变化和安全隐患。
在高速公路改扩建工程中,施工过程中会受到天气、地质、环境等多种因素的影响,这些影响可能导致道路和周边环境发生变化,从而引发安全隐患。
机载激光雷达扫描技术可以通过定期扫描和监测,及时发现道路和周边环境的变化,并对可能出现的安全隐患进行预警和处理,保障施工过程的顺利进行和施工安全。
机载激光雷达扫描技术还可以实现对道路畅通情况的实时监测和分析。
在高速公路改扩建工程中,施工期间可能会对道路交通产生影响,而机载激光雷达扫描技术可以通过对车辆行驶状态、车流密度、车辆速度等数据的采集和分析,及时监测道路的畅通情况,为交通管理部门提供决策依据,保障道路交通的畅通和安全。
机载激光雷达扫描技术在高速公路改扩建工程中具有广泛的应用前景。
它可以对道路和周边环境进行高精度的测量和建模,实时监测施工过程中的变化和安全隐患,以及实现对道路畅通情况的实时监测和分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
础 数 据 的信息 采集 系统 … 。 目前 成 熟 的商 业 车 载激 光 扫
描 系统 主要 有加 拿大 O p t e c h公 司的 L y n x系 统 和英 国 3 D
L a s e r Ma p p i n g & I G I 的 S t r e e t Ma p p e r系 统 。 国 内 的 一 些 研
究 单位 如武 汉 大 学 、 首 都 师 范 大学 等 也 开始 了相 关 的 实
验 研究 。
随着激 光 扫描 硬 件 技 术 的发 展 , 激 光 扫 描 数 据 处 理 的相关 研究 也得 到 了 充分 的 发展 。 目前 基 于 点 云数 据 的
测 到的绝 大部 分 异 常 情 况 进 行 自动修 复 , 并 能 够 对 提 取
处理大规模的激光点云数据 , 很好 地满足客户对 于大规
模 三维建模 的需 求 , 具有 实 际应用 价值 。
作 者 简介 : 谭
敏( 1 9 8 5一 ) , 女, 湖北 洪湖 人 , 工程师 , 硕士, 2 0 1 4年毕 业于 中南 大学地 图学 与地 理信 息系统 专 业 , 主要 从 事地 理 信息
0 引 言
车载激 光扫 描系 统是 将激 光扫描 仪 、 G P S 等 设备 安装
在车顶 , 在车 辆 行 驶 过 程 中动 态采 集 车辆 两 侧 目标 物 表 面的 三维 信 息 , 为高精 度 、 大规 模 的三 维 场景 重 现提 供基
要是 针 对城 市路 网提取 , 无法 提 供真 实 、 准 确 的路 面 三维
的路 面进 行三 维建 模 。本 文 中 的检测 与 重 建方 法 能快 速
城 市 场景重 建 研 究 , 主 要 集 中于 建 筑 物立 面建 模 和 树
木 的 重建 , 而对 城 市场 景 中的道 路研 究 较少 , 有 的研 究 主
收 稿 日期 : 2 0 1 4一 O l 一 2 2
t i o n a n d r e c o n s t r u c t i o n . We e x t r a c t e d t h e p a t h o f s c a n n i n g c a r u s i n g i f l e o f GP S o r t h e r o t a t i o n a n g l e o f t h e l a s e r s c a n n e r .An d t h e n we
从 而 完成 对 路 面 的 重 建 。输 出的路 面 三 维 模 型 为 O B J 格式, 可满足相 关领域 对精确路 面的需求 , 比如 三 维城 市
建模 。 关键 词 : 激光点云 ; 路 面; 检测 ; 重建; 三 维模 型
中图分类号 : P 2 2 8 文 献标 识 码 : A 文章 编 号 : 1 6 7 2— 5 8 6 3
模 型 。A b u h a r o u s 等根 据路 面高度 直方 图进行 了路 面边 界
信息 提取 , 并 计 算 了路 面 宽 度 和 曲率 。杨 必 胜 等 利 用 点 云数据 的 回波 强 度 等 信 息 , 经过 H o u g h变换 检 测 出直
线特 征来 进行 道路 标识 线 的提取 。这 些 方 法都 是 针对 具
步骤是 基于 城市 道路一 般设有 路 沿 这一 假设 ) , 所 以在 检 测过 程 中 , 若 局 部 高度 变化 出现 激变 跳跃 , 并且 不 符合 实 际情 况 , 便认 为该 处附 近 出现边 界 点 , 然后 进 行边 界点 的 精确定 位 。将检测 到 的各 个边 界 点依 次 连 接 即可 得到 路
沿, 路面 也就 可 以确 定 。由 于数 据 的缺 失 或 路 面 上 其 他 物体 的遮 挡 , 使 得 所检 测 到的路 沿在 某 些位 置 出现 异 常。 本文通 过合 理 性 检 测 和异 常 处 理 来 消 除这 种 影 响 , 且 在
处 为边界 点 , 把 搜 索 到 的 每 条 扫描 线 上 的 边 界点 依 次连 接便 得 到道路 边沿 , 完成 路沿 的精确 定位 。
找 到一个 点作 为 道 路 的边 界 点 , 于 是 可从 得 到 的 车行 路 线 开始 , 利用 垂直 于路 面的法 向量 ( 0 , 0 , 1 ) 和 相邻 重 采样
点组 成 的向量 , 可 得 到垂 直 于路 面 和 车行 路 径 方 向 的 向 量, 也就 是 向道 路 两 侧 的方 向 , 以一 定 步 长 向两 侧 延 伸 。 在 检测 过程 中 , 如 果 局部 高度 变化 出现异 常 , 即可认 为该
谭 敏
( 武大吉奥信 息技 术有限公司 , 湖北 武汉 4 3 0 2 2 3 )
摘 要 : 以 车 载 激 光 点 云 数 据 为 研 究对 象 , 提 出 了 一 种 新 的路 面检 测 与 重 建 的 方 法 。 该 方 法根 据 G P S定 位 器 中
的索引文件或激光扫描仪 的旋转 角度值提 取扫描车的车行路 径 , 利 用提 取到的 车行路 径去检 测对应 的路 沿。然 后, 对检 测到的路 沿 中出现 的各种异 常进行相应 的平滑 处理 。在得 到精确 的路 沿线后 , 可得 到路 面的三 维模 型 ,
为很强的提示信息来检测路面点云。路面点云的异常主
要来 自于叉 道和遮 挡 , 可优先 考 虑这 两种 异 常情 况 , 来 提
高系统 的 自动 化 程 度 。本 文 拟 采 用 一 种 半 自动 建 模 方
似, 都是 通过 测边 、 测 角进 行 定 位 。激光 扫 描仪 水 平 直线 方向扫描射程范 围内的地表物体 , 采集到的激光 点云数
o f oa r d c a n b e e x p o s e d a s 3 D o b j e c t i f l e f o r ma t t o s a t i s f y t h e d e ma n d s o f a c c u r a t e r o a d s u f r a c e i n r e l a t e d i f e l d s , s u c h a s t h r e e —d i m e n -
T AN Mi “
( Wu d a G e o i n f o r ma t i c s C o .L t d . , Wu h a n 4 3 0 2 2 3 , C h i n a )
Ab s t r a c t : I n t h i s p a p e r , w e t o o k v e h i c l e —b o r n e l a s e r p o i n t c l o u d d a t a a s r e s e a r c h o b j e c t a n d p r o p o s e d a n e w m e t h o d f o r r o a d d e t e c —
系统应 用 研究 及系 统集 成相关 工 作 。
1 1 6
测 绘 与 空 间地 理 信 息
角 度值下 的点 云数据就 是扫 描车 的车行 路径 。
2 0 1 5舞
1 车载激 光点云数据的路面检 测
激 光点 云数 据有 其 自身 的特 点 和 规 律 , 如 激 光 扫 描
有条带扫描信息 的点云数据 , 不适 用于大规模 的离散点 云数 据 。
作者 通过 对 以点云 形式 表 示 的路 面 三 维几 何 特征 的 深入 分 析与 理解 , 提 出 了一种 新 的路 面 检测 方法 , 并对 检 测过 程 中出现 的各 种 异 常 情 况 进 行 了 自动检 测 , 能 对 检
车始终 在 路 面上行 驶 , 因此 , 可 以将 扫 描车 的运 行 路径 作
1 . 2 道 路 边 沿提 取
激光 扫描 仪采样 频 率 高 , 点 间距 可 达 1 c m, 因此, 需
要对 提取 出 的 车行 路 径 进 行 重 采样 , 以减 少 数 据 量 。从
数据 获取 方式 角 度 , 激 光扫 描 仪 与 大 地测 量 系统 极 其 相
通过 分析 路面 在激 光点 云 数据 中 的表 征 以及 进 行 的
大 量数据 测试 表 明 , 运 用 如 下标 准 可 确 定 每 条 扫 描 线 的
边 界点 :
自动修 整之 后 进 行 人工 干预 , 使 得 最后 结 果 符 合 实 际 情
s i o n l a c i t y mo d e l i n g .
Ke y wo r d s : l a s e r p o i n t c l o u d;r o a d s u r f a c e ;d e t e c t i o n;r e c o n s t r u c t i o n;t h r e e—d i me n s i o n l a mo d e l
第3 8卷 第 7期
2 0 1 5 年 7 月
测 绘 与 空 间地 理 信 息
G EO MAT 1 C S& S P AT I A L l NF OR MA T I O N T E C HNOL OGY
Vo 1 . 3 8, No . 7
J u 1 . ,2 0 1 5
基 于 车 载 激 光 点 云 数 据 的 路 面 检 测 与 重 建
u s e d t h e e x t r a c t e d p a t h t o d e t e c t t h e r o a d e d g e .T h e n t h e a b n o r ma l i t i e s o f t h e g e n e r a t e d r o a d e d g e w e r e s mo o t h e d .W e c a n r e c o n s t r u c t