高层建筑外墙清洗机的设计
高空清洁刷洗机构的设计
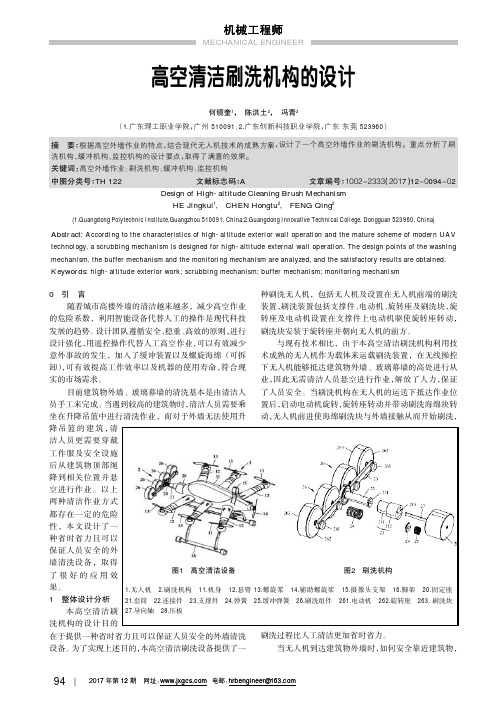
高空清洁刷洗机构的设计何镜奎1,陈洪土2,冯青2(1.广东理工职业学院,广州510091;2.广东创新科技职业学院,广东东莞523960)摘要:根据高空外墙作业的特点,结合现代无人机技术的成熟方案,设计了一个高空外墙作业的刷洗机构。
重点分析了刷洗机构、缓冲机构、监控机构的设计要点,取得了满意的效果。
关键词:高空外墙作业;刷洗机构;缓冲机构;监控机构中图分类号:TH122文献标志码:A文章编号:1002-2333(2017)12-0094-02Design of High-altitude Cleaning Brush MechanismHE Jingkui1,CHEN Hongtu2,FENG Qing2(1.Guangdong Polytechnic Institute,Guangzhou510091,China;2.Guangdong Innovative Technical College,Dongguan523960,China) Abstract:According to the characteristics of high-altitude exterior wall operation and the mature scheme of modern UAV technology,a scrubbing mechanism is designed for high-altitude external wall operation.The design points of the washing mechanism,the buffer mechanism and the monitoring mechanism are analyzed,and the satisfactory results are obtained. Keywords:high-altitude exterior work;scrubbing mechanism;buffer mechanism;monitoring mechanism0引言随着城市高楼外墙的清洁越来越多,减少高空作业的危险系数,利用智能设备代替人工的操作是现代科技发展的趋势。
高层建筑外墙清洗机升降机部分的设计

高层建筑外墙清洗机---升降机部分的设计高层建筑外墙清洗机是一种投资小,成本低,安全可靠,工作效率高的机器。
该机器分为两部分,一部分是在大楼顶上的清洗机升降机,清洗机升降机通过钢丝绳,吊钩带动另一部分,即清洗机附在高层建筑外墙壁上进行清洗工作。
高层建筑外墙清洗机工作时,升降机的双速电机启动,通过钢绳带动机架迅速上升,上升到预定位置,双速电机停止并制动,调整好清洗机的位置后,解除制动,双速电机反向启动,机架则缓慢向下移动,与此同时,机架顶部的喷淋水嘴喷水,各导轨上的刷具在各电机的带动下沿各自的导轨往复移动的同时作旋转运动,洗清外墙上的污渍,使外墙干净洁白美观。
第一章序言§1.1清洗建筑表面的意义随着人类社会的不断发展进步,城市规模不断扩大,城市建筑更加规范,完美。
千姿百态的各式建筑,尤其是高层建筑外墙都用各种建筑材料进行装饰,如粘帖各色墙砖,瓷砖,马赛克,或涂上涂料,但是,自然界的风吹雨打,日光辐射,尘埃污染,以及一些人为或偶然事故等原因,一段时间过后,建筑表面都将不同程度地变得污浊灰暗,破旧不堪,在环境差的地区,污染或损坏还相当严重。
建筑表面就像人身上的外衣,要保持清洁,就需要经常清洗,整理。
为此,世界发达国家和地区,对保持建筑表面的清洁非常重视,并以法律的形式明确规定,每年必须定期清洗,否则将受到处罚。
近年来,我国各级政府部门的环境保护意识已发生了很大改变,国内一些大,中城市,特别是旅游,开放城市,旅游景点,为保持建筑表面清洁,也制定出台了相应的法规,全国范围的卫生评比活动,把保持建筑表面清洁列为考核的重要指标之一,其中高层建筑的外墙,醒目,突出,自然也就成为检查的重中之重。
有信息表明,十·五期间国家用于环境保护的投资将由九·五期间国民生产总值的1.5%翻倍增加至4%,同时还伴随以产业政策的优惠。
所以,随着我国改革开放的不断深入,政府,公民的环保意识的不断加强,建筑表面清洁问题必将引起各方面的高度重视,建筑清洗行业必然具有广泛的发展前景,将产生巨大的经济效益和社会效益.建筑表面清洗主要包括外墙清洗和中央空调风管的清洗,目前外墙清洗是采用传统的“蜘蛛人”清洗,这是以牺牲生命为代价的非人工作,部分城市颁布了建筑表面清洗条例;由于非典事件,公共卫生得到了高度的重视,特别是中央空调风管的清洗,最近有关中央空调的清洗条例很快出台;因此对于建筑表面清洗提供一个完备的解决方案,必然打破一个传统的产业格局,改变了人们的工作方式,用机器人清洗代替传统的人工清洗或无法清洗,是必然的发展趋势。
高层楼宇墙壁自动清洗机行走机构设计

高层楼宇墙壁自动清洗机行走机构设计
高层楼宇墙壁自动清洗机的行走机构设计需要考虑以下几个方面:
1. 车轮设计:行走机构需要具备强大的粘着力和稳定性,能够
在垂直、水平和斜面等墙面上行走,因此需要设计具有优异附着力
的车轮,例如采用橡胶轮胎、滚动轮等。
2. 驱动系统设计:行走机构需要配备高效的驱动系统,以保证
其在复杂墙面上顺利行驶。
一般采用电动机、齿轮减速器、液压系
统等。
3. 导向系统设计:行走机构需要设计一套精确稳定的导向系统,以保证车身在行驶时能够保持自身稳定。
设计导向系统可以采用悬
挂绳、伸缩臂等。
4. 控制系统设计:自动清洗机行走部分需要安装控制系统,能
够便于操作自动清洗机上下、左右、前后的行动。
以上几点是行走机构设计时需要考虑的,应保证行走机构具有
足够的稳定性和灵活性,能够完成不同角度和复杂墙面的清洗工作。
高楼清洗机机电系统设计

高楼清洗机机电系统设计摘要近年来,随着社会的发展,楼层越来越高,使用玻璃幕墙的楼房也越来越多,避免清洗时一个很重要的问题,传统的方式多数为人工,或者是采用电缆从楼顶将机器人吊下,工作效率偏低,危险性高,于是清洗用爬壁机器人应运而生,本文的任务就是设计一种能够在壁面上吸附行走的清洗机器人。
本文在简单介绍清洗机器人的国内外研究现状的基础上,基于二维软件CAD对四轮式风压吸附清洗机器人的本体机构进行了设计,对一些关键部分进行了设计计算及校核计算,重点是爬壁机器人的移动结构、吸附结构和驱动系统的设计计算。
本文设计的清洗机器人采用四轮式小车形状结构,结构简单;采用风压吸附方式,利用螺旋桨对空气的压缩所产生的压力将机器人压在物体表面,避免了清晰机器人对壁面的局限,降低了控制难度;清洗机主要由伺服悬吊系统、清洗主机和由计算机控制系统组成;采用无人化清洗,自动清洗,自动供水,自动供清洗液,单片机系统控制,操作人员只需通过键盘即可操纵清洗机工作,而且在清洗过程中,清洗机能够自动进行边缘识别,可根据建筑楼层的具体情况选择为纵洗或横洗;采用后轮驱动,一个电机驱动两个后轮,后轮带动前轮完成机器人的行走,使用直齿圆柱齿轮传动装置作为减速器;采用楼顶供电;机器人可以在水平面或者垂直表面直线行走。
本机的清洗效率较高,清洗效果良好。
关键词:清洗机器人;减速器设计;风压吸附;单片机控制;齿轮机构;电机控制;刷洗;ⅠABSTRACTIn recent years, with the development of society, more and more floors, with glass curtain wall building more and more toavoid cleaning a very important issue, most of the traditional way of artificial, or a cable from the top of the building will be used under the robotic crane, low efficiency, high-risk, then cleaned with a wall-climbing robot came into being, this task is to design a walk on the adsorption to the wall climbing robot for cleaning.This paper briefly wall-climbing robot based on the research status, based on 2D software, CAD, four-wheel vacuum on wall-climbing robot body bodies were designed, carried out on some key satisfied with the design calculation and checking terms, focusing on the mobile climbing robot structure, adsorption structure and drive system design and calculation.This designed wall-climbing robot car with four-wheel-type shape of the structure, simple structure;By pressure adsorption,robot using the pressure generated by the propeller on the compressed air pressure in the surface,avoiding the clear limitations of the robot on the wall,reducing the difficulty of control;Washing machine is suspended by a servo system, cleaning host and consists of computer control system;The cleaning of the unmanned, automatic cleaning, automatic water supply for automatic washing liquid, single chip control system, operating only through the keyboard to manipulate the work of the washing machine in the cleaning process, the washing machine to automatic edge recognition, according tothe building floor wash for vertical or horizontal wash;Rear-wheel drive, a motor to drive the two rear wheels, rear wheel drive the front wheels to complete the robot to walk, use of the spur gear transmission device as reducer;Roof supply; robot walk a straight line can be horizontal or vertical surface. The higher the cleaning efficiency of the machine a good cleaning effect.Key words: Cleaning Robot;Reducer Design;PressureAdsorption Mode;MCU Control;Gear mechanism;Motor control;Scrub;目录摘要(Ⅰ)Abstract (Ⅱ)第1章绪论 (1)1.1 课题研究的目的和意义 (1)1.2 课题研究现状及分析 (1)1.2.1 国外壁面清洗机器人研究现状 (1)1.2.2 国内壁面清洗机器人研究现状 (2)1.3 高层建筑外墙清洗机发展趋势 (4)1.4 课题的研究设想 (4)第2章清洗机器人总体方案设计 (5)2.1 对楼顶楼面的实际考察 (5)2.1.1楼面结构考察 (5)2.1.2 楼顶的实际考察 (5)2.2 清洗机器人的总体方案 (6)2.3 清洗机器人清洗系统方案 (7)2.4 清洗机器人爬壁系统方案 (8)2.5 清洗机器人控制系统方案 (8)2.5.1设计的基本原则 (8)2.5.2可供选择的设计方案 (8)2.5.3方案的分析 (8)2.6 其它部分方案 (9)2.6.1材料选择 (9)2.6.2 轮的润滑问题 (9)2.6.3 轴承的润滑问题 (9)2.7 本章小结 (9)第3章清洗机器人清洗系统设计 (10)3.1 清洗机器刷洗部分设计 (10)3.1.1 盘刷设计 (10)3.1.2 滚刷设计 (11)3.1.3刷洗部分所用弹簧的设计 (11) 3.2 内空心轴设计 (12)3.3 清洗机主机滚轮的设计计算 (13) 3.4 主机上传感器及行程开关的选择 (13) 3.5复合缆的结构设计 (14)3.6 本章小结 (14)第4章清洗机器人风压系统设计 (15) 4.1 采用风压的意义 (15)4.2 基本原理 (15)4.3 气动计算的原始数据与技术要求 (15) 4.4 风压部分力学计算 (16)4.5 本章小结 (16)第5章清洗机器人主要零件设计 (18) 5.1 直齿轮副的设计计算 (18)5.1.1 齿轮的设计计算及强度校核 (18) 5.1.2 齿面接触疲劳强度计算 (20)5.1.3 齿根抗弯疲劳强度验算 (21)5.1.4 齿面静强度计算 (22)5.1.5 齿根(抗弯)静强度验算 (23) 5.2 锥齿轮副的设计计算 (24)5.2.1 基础尺寸确定 (24)5.2.2 确定载荷系数K (25)5.2.3 齿面接触疲劳强度计算 (25)5.2.4 齿根抗弯疲劳强度计算 (26)5.3 本章小结 (26)第6章清洗机器人控制系统设计 (28) 6.1 控制部分的基本组成 (28)6.2 控制部分工作原理 (29)6.3 驱动部分工作原理 (30)6.4 控制软件的实现 (30)6.4.1 主机+POD组合 (30)6.4.2 双平台 (31)6.5 软件的结构 (31)6.5.1 软件的主体结构 (31)6.5.2 软件功能模块的划分 (31)6.6 控制系统软件程序的实现 (32)6.6.1 伺服悬吊系统部分 (32)6.6.2 清洗机主机部分 (32)6.7 本章小结 (33)结论 (34)参考文献 (35)致谢 (37)附录 (38)第1章绪论1.1 课题研究的目的和意义随着城市现代化得发展和人口的日益增加,为了节省土地资源,高层建筑越来越多,各式各样的摩天大楼成为现代都市中一道亮丽的风景。
高层建筑外墙清洗机的设计

目录1. 引言 (2)2. 课题任务 (4)2.1 主要内容 (4)2.2 技术要求 (4)2.3 成果要求 (4)2.4 其他要求 (4)3. 同类课题考察 (5)3.1 高层建筑外墙清洗机现状 (5)3.2 高层建筑外墙清洗机发展趋势 (7)4. 总体方案拟订 (8)4.1 对楼顶楼面的实际考察 (8)4.1.1 楼面结构考察 (8)4.1.2 楼顶结构考察 (9)4.2方案选择与原理 (10)4.2.1总体方案的确定 (10)4.2.2总体方案内容 (13)4.2.3材料选择 (13)4.2.4轮的润滑问题 (14)4.2.5轴承的润滑问题 (14)5 重要零部件的设计与计算 (14)5.1刷洗部分设计 (14)5.1.1清洗速度的确定 (14)5.1.2 盘刷部分 (14)5.1.3电机的选择 (16)5.1.4刷洗部分所用弹簧的设计计算 (17)5.2内空心轴的设计 (17)5.3 清洗机主机滚轮的设计计算 (18)5.4 主机上传感器及行程开关的选择 (18)5.5复合缆的结构设计 (19)5.6风压系统的设计计算 (20)5.6.1采用风压的意义 (20)5.6.2 基本原理 (20)5.6.3气动计算的原始数据与技术要求 (20)5.6.4结构设计及相关数据计算 (21)5.6.5抛物线中线 (23)5.7齿轮副的确定和检验 (24)5.7.1直齿轮的计算 (24)5.7.2.锥齿轮副的设计计算 (30)6 设备的使用与维护 (34)6.1 使用方法 (34)6.2 使用注意事项 (35)6.3 日常维护与维修 (35)7 CAD使用体会 (36)参考文献 (38)1. 引言随着社会进步,经济与科技的发展,城市规模越来越大,建筑越来越高,以至摩天大厦比比皆是。
高层建筑更是成了一个城市面貌的核心内容,但是由此导致的城市形象问题也日趋严重,尤其是在工业城市,这种问题更是突出。
靓丽的新大楼,不用多久,外表便成为灰暗一片,严重影响了城市的面貌。
自动墙壁清洗机毕业设计

目录1引言 (1)1.1清洗建筑表面的意义 (1)1.2目的和现实意义 (1)1.3研究现状 (2)2 方案评价与选择 (3)2.1高楼外墙清洁机的结构和工作 (3) (3) (4) (4)2.1.4动作马达 (4) (5)刷 (5)2.2方案评价与选择 (5)3 运动学及结构方案的确定 (6)3.1运动学参数选定 (6)3.2计算总传动比和分配各级传动比 (8)3.3计算传动装置运动和动力参数 (8)4 传动零件的设计计算 (10)4.1 第一级齿轮传动设计计算 (10)4.1.1.初步计算 (10)4.1.2校核计算 (10)4.2第二级齿轮传动设计计算 (14)4.2.1.初步计算 (14)4.2.2校核计算 (14)4.2.3确定传动主要尺寸 (16)4.3 画简图 (18)4.3.1 初估轴径 (18)4.3.2 初选联轴器 (19)4.3.3 初选轴承 (19)5轴的校核计算 (20)5.1高速轴受力分析 (20)5.2中间轴校核计算 ............................................................................................6高速轴轴承验算 (28)致谢 (30)参考文献 (31)附录 (31)附录1 外文文献翻译附录2 外文文献原文附录3 自动墙臂清洗机装配图 A0附录4 自动墙臂清洗机零件图1 A1附录5 自动墙臂清洗机零件图2 A1附录6 自动墙臂清洗机零件图3 A31引言1.1 清洗建筑表面的意义随着人类社会的不断发展进步,城市规模不断扩大,城市建筑更加规范,完美。
千姿百态的各式建筑,尤其是高层建筑外墙都用各种建筑材料进行装饰,如粘帖各色墙砖,瓷砖,马赛克,或涂上涂料,但是,自然界的风吹雨打,日光辐射,尘埃污染,以及一些人为或偶然事故等原因,一段时间过后,建筑表面都将不同程度地变得污浊灰暗,破旧不堪,在环境差的地区,污染或损坏还相当严重。
高楼外墙清洗机设计_毕业设计(论文)(可编辑)

高楼外墙清洗机设计_毕业设计(论文)目录摘要 1Abstract 10前言 21方案分析21.1 设计要求21.2 方案一滚动?往复移动式 21.3 方案二转动?往复移动式 31.4 方案比较与选择 51.4.1 滚动?往复移动装置优缺点51.4.2 转动?往复运动装置优缺点52 材料分析 53 设计计算 63.1 减速电机的选择 63.1.1 电动机类型的选择 63.1.2 电动机电压和转速的选择 63.1.3 电动机型号规格的选择 63.2 减速器的选择73.2.1 按强度选用减速器73.2.1.1传动比要求 73.2.1.2 计算功率73.2.2校核热功率83.3 链传动装置的设计计算83.3.1滚子链传动设计的计算8 3.3.2滚子链链轮123.3.2.1主动链轮的齿形设计12 3.3.2.2从动链轮的齿形设计15 3.4 齿轮齿条传动装置的设计计算 17 3.4.1齿轮类型和精度等级173.4.2按齿面接触疲劳强度计算17 3.5轴的设计213.5.1齿轮轴的设计计算213.5.2主动链轮轴的设计计算24 3.6导向轮与导向齿条的设计计算24 3.6.1导向齿条的设计计算243.6.2导向轮的设计计算253.7轴承与联轴器的选取263.8键的选取283.9标准件的选取284润滑与密封294.1润滑294.2密封285设计总结29参考文献30致谢31高楼外墙清洗机设计摘要:通过分析现代建筑壁面清洗技术的需求,构思出多个设计方案并进行各方面的的对比和分析,优选出合理的设计方案。
设计时充分考虑清洗效率等方面的要求,通过零件材料的合理选择、关键零件的严格分析计算和结构设计,以及整个图纸的严格设计,使该设计满足现有壁面的清洗技术需求,提高工作效率和作业安全性。
关键词: 高楼外墙旋转清洗机构设计The Design on Mechanism for Cleaning Wall of Hing BuildingBy Jikequli Agricultural mechanization and automationDirected by Associate Prof. Liao nianheAbstract: Through analyzing the demand of the modern technology in cleaning wall of hing building, a new system of cleaning device is designed after identifying the problems and deficiencies.There are a couple of design options, and through comparing and analyzing these programs, select the optimized and rational one. The production design has been given full considerations to the requirements in terms of efficiency; through choosing the parts of the reasonable, rigorous calculating and analyzing and structural designing of the key components, and designingthe whole of the drawings strictly, making the design fully meet the current techonology demands, and improve the work efficiency and security.Key words: Curtain cleaning Rotation mechanismDesign0 前言随着我国经济的快速发展和人们生活水平的提高,城市建筑也迅速朝高空中发展。
高层建筑外墙清洗机-升降机部分的设计
垢。通常所说的污垢是三者的总称。 2)污渍 污渍由多种成分的灰尘和水的混和物,酸雨痕迹,菌类以及泥浆、染料等渍迹组成。
在软、硬表面上都粘染。建筑物是最大污渍粘染表面,故污渍一旦粘染不及时清除,就 会常期顽固的留存,使建筑物表面受到严重的污染。
3)污垢 污垢有油基、水基之分。随着人们生活水平的提高,工业迅速发展,污垢的种类越 来越多,成分越来越复杂。污垢的质量远远高于灰尘和污渍。污垢不及时清洗干净就会 在建筑物表面留下永存印迹而且失去光采。除以上三种污垢外,对于金属建材而言还有 另外一种污垢形式,就是变色。这是金属与水、空气中的某些物质发生化学反应造成的 如铁锈、铜绿、金、银、铝的表面氧化变暗等。总之,建筑物所存在的位置、环境不同, 污垢的成分和污染程度亦有所不同,有的光滑(如釉面砖)、有的粗糙(如水涮石)、有的 易被酸碱腐蚀(如铝合金门窗)、有的易被溶剂溶解(如丙酮可溶解化工涂料)。由于外墙 的介质有所不同,所以在清洗外墙前要分析外墙的成分和理化性质及污染程度。 对此社会大多出现了人工、物理和化学的方法,分作简要介绍如下: 1)人工清洗
§1.3 高层外墙清洗机简介
我们设计了一种投资小,成本低,安全可靠,工作效率高的全自动高层建筑外墙清 机。该机器分两部分,一部分是在大楼顶上的清洗机升降机,清洗机升降机通过钢丝绳, 吊钩带动另一部分,即清洗机附在高层建筑外墙壁上进行清洗工作。全自动高层建筑外 墙清机工作时,升降机的双速电机启动,通过钢绳带动机架迅速上升,上升到预定位置,
(1) 首先查看作业现场,确定作业方案。重点查看屋顶状况,确认能否安装吊篮、 吊板;吊篮、吊板在屋顶移动有无障碍;霓虹灯、广告字牌等是否防碍作业等。(2)安 装运载工具——吊篮或吊板。如大厦已安装擦窗机,则按规范进行操作前的检测。(3) 准备擦拭工具,包括水桶、清洁剂、毛滚、胶刮、毛巾以及备用辅助工具铲刀、刮刀、 溶剂等。(4) 作业人员携带工具上吊篮或吊板。有些工具应用松紧绳栓在吊篮或吊板 上,以防一旦失手从高空落下伤人。在地面上设拦护绳和安全告示牌。(5) 作业方式 为从上到下。每擦拭完一溜,整理工具、加清洁剂、横向移动吊篮或吊板,再继续第二 溜作业。(6) 擦拭玻璃方法:检查玻璃上有无粘着物等污迹,如有,先用刮刀等相应 辅助工具和溶剂除去。将毛滚浸入桶中,待清洁剂充分吸入后,用手轻轻捋一下(以不 入下滴水为宜),均匀涂抹在玻璃上。涂抹时,一般为由上往下滚,横向移动,每趟滚 迹要交叉相压,以防漏涂。用胶刮将涂抹在玻璃上的清洁剂刮净,操作时应稍用力,将 胶刮均匀按压在玻璃上,由上至下慢慢刮动,一次刮净一溜,用湿毛巾擦净胶刮后,再 横向移动刮另一溜。玻璃刮净后,用毛巾将窗擦净。确认一次应作业范围的玻璃已擦拭
自动墙壁清洗机毕业设计

自动墙壁清洗机毕业设计自动墙壁清洗机是一种能够自主完成墙面清洁任务的机器人设备,它利用先进的传感器和控制系统,能够准确识别墙面的污垢,并自动化地进行清洗。
本文将从设计背景、关键技术、系统结构以及实验结果等方面对自动墙壁清洗机进行详细介绍。
设计背景随着城市建设的不断发展,高层建筑和大型公共设施的墙面清洁成为一个重要而繁重的任务。
传统的清洁方法需要人工爬高墙体,存在人身安全风险,并且效率低下、成本高昂。
因此,设计一种自动墙壁清洗机器人成为了迫切需求。
关键技术1.墙面识别技术:自动墙壁清洗机需要能够准确地识别墙面的形状和位置,以便进行准确的清洁操作。
可以利用激光传感器或视觉传感器等技术实现。
2.路径规划技术:清洗机器人需要根据墙面的布局规划最优的清洗路径,以提高清洁效率。
可以采用遗传算法、蚁群算法等智能优化算法进行路径规划。
3.清洗设备技术:清洗机器人需要配备适当的清洗装置,如高压喷水装置或刷子装置,以便能够有效地清洁墙面污渍。
系统结构1.机器人本体:机器人本体是清洁机器人的核心部分,包括机械结构和电气系统。
机械结构应具备足够的稳定性和灵活性,以适应各种复杂墙面形状的清洁任务。
电气系统则负责控制各个模块的协调工作。
2.传感器模块:传感器模块用于感知墙面的状态,包括墙面的位置、形状、污渍等信息。
可以使用激光传感器、视觉传感器、力传感器等进行数据采集。
3.控制系统:控制系统负责接收传感器模块的数据,并根据设定的清洗算法进行数据处理和决策。
控制系统还可以实现路径规划和运动控制等功能。
4.清洗装置:清洗装置是清洁机器人的关键组成部分,根据墙面的污垢情况选择合适的清洗方式,可以采用高压喷水装置、机械刷子装置等。
实验结果我们设计了一台自动墙壁清洗机器人,并进行了实验验证。
实验结果表明,该机器人能够准确识别墙面的污垢,规划最优的清洗路径,并成功完成清洁任务。
与传统的人工清洁相比,自动墙壁清洗机器人具有清洁效率高、安全可靠、成本低等优点。
高层玻璃幕墙清洗机器人机械部分设计
1 绪论1.1 高层玻璃幕墙清洗机器人研发意义随着人口规模的不断扩大,城市高层建筑越来越多。
摩天大楼逐渐成为生活中常见的一景。
由于玻璃具有采光性好、保温性好、防潮性好等诸多优点,同时,由于彩色玻璃美观大方,所以越来越多的高层建筑选择了用玻璃幕墙。
目前,我国大部分玻璃幕墙的清洗都需要依靠“蜘蛛人”来完成,但是,这种高空作业有一定的危险性。
因此,需要一个能够代替人力完成清洗任务的机器人。
1.2 高层玻璃幕墙清洗机器人研究现状及分析1.2.1国外玻璃幕墙清洗机器人研究现状德国相关公司委托制作的“SKYWAH”是这个星球上第一个能够成功制作出来的清洗机器人。
这个庞大的机器人主要结构是个多关节巨型伸缩臂,能够在距离33米的地方完成工作。
所有的轴采用抗拉钢材并采用液压驱动,所以结构重量较轻。
这一款清洗机器装置安装在四轮驱动的汽车相关底盘上,清洗刷较长,定位精度高。
该机器人可以在人的监视下完成清洗工作,动作灵活。
与我们一衣带水的邻国——日本,他们的机器人公司之一——BE公司研制过一款轨道已经固定好的的专门用于擦玻璃的机器人,依据安装在楼顶的轨道和相关的提升系统,清洗机可以准确地对准窗户。
该设备优点是自动化程度相对较高。
但是,一般建筑在设计之初不会将擦窗系统考虑其中,使该机构适用性大大降低。
图自动清洗机-1图21-1SKYWAH德国玛歌堡的费劳恩霍费尔相关的研究所是德意志共和国主要的生产和自动化中心,它们在过去的这些年,曾经较为成功地研究了一系列清洗机器人。
该机器人可横向、可纵向,随心所欲完成清洗任务。
德国佛拉货福尔研究所研制了一种名为SIRIUSC的清洗机器人。
在那些要清洗的相关建筑物上,我们放在了上面一辆跟随及其运动的小车,这辆小车不紧急今年能够起到定位的作用,而且还能对装置起到安全保护的作用。
机器人坐竖直运动,左右移动依靠小车来完成。
美国航空航天宇航局下属的机器人公司,在上个世纪研制了爬壁机器人“Sky Washer”(用于清洗摩天大楼),它重大约四十斤,该机器人利用两组框架(L型)进行相对滑动,交替吸附来实现机器人的移动。
自动墙壁清洗机设计(机械cad图纸)大学毕设论文
目录1引言 (1)1.1清洗建筑表面的意义 (1)1.2目的和现实意义 (1)1.3研究现状 (2)2 方案评价与选择 (3)2.1高楼外墙清洁机的结构和工作 (3)2.1.1设置于顶楼的支撑突梁 (3)2.1.2支撑缆绳 (4)2.1.3乘载用挂笼 (4)2.1.4动作马达 (4)2.1.5升降结构 (5)2.1.6清洗刷 (5)2.2方案评价与选择 (5)3 运动学及结构方案的确定 (6)3.1运动学参数选定 (6)3.2计算总传动比和分配各级传动比 (8)3.3计算传动装置运动和动力参数 (8)4 传动零件的设计计算 (10)4.1 第一级齿轮传动设计计算 (10)4.1.1.初步计算 (10)4.1.2校核计算 (10)4.2第二级齿轮传动设计计算 (14)4.2.1.初步计算 (14)4.2.2校核计算 (14)4.2.3确定传动主要尺寸 (16)4.3 画简图 (18)4.3.1 初估轴径 (18)4.3.2 初选联轴器 (19)4.3.3 初选轴承 (19)5轴的校核计算 (20)5.1高速轴受力分析 (20)5.2中间轴校核计算 (23)6高速轴轴承验算 (28)致谢 (30)参考文献 (31)附录 (31)附录1 外文文献翻译附录2 外文文献原文附录3 自动墙臂清洗机装配图 A0附录4 自动墙臂清洗机零件图1 A1附录5 自动墙臂清洗机零件图2 A1附录6 自动墙臂清洗机零件图3 A31引言1.1清洗建筑表面的意义随着人类社会的不断发展进步,城市规模不断扩大,城市建筑更加规范,完美。
千姿百态的各式建筑,尤其是高层建筑外墙都用各种建筑材料进行装饰,如粘帖各色墙砖,瓷砖,马赛克,或涂上涂料,但是,自然界的风吹雨打,日光辐射,尘埃污染,以及一些人为或偶然事故等原因,一段时间过后,建筑表面都将不同程度地变得污浊灰暗,破旧不堪,在环境差的地区,污染或损坏还相当严重。
建筑表面就像人身上的外衣,要保持清洁,就需要经常清洗,整理。
高空玻璃幕墙清洗机器人的研究与设计

3、清洗效果:经过多次实验验证,该清洗机器人可以在短时间内完成大面 积的玻璃清洗任务,且清洗效果干净整洁。同时,机器人的工作不会对玻璃幕墙 造成任何损伤,具有很高的安全性。
五、总结与展望
本次演示成功设计了一款高效、安全的高空玻璃幕墙清洗机器人,解决了人 工清洗方式效率低下和安全隐患等问题。该机器人具有自动适应环境、清洗效率 高、操作简单、成本低廉等优点,在未来的高空玻璃幕墙清洗市场中具有广泛的 应用前景。
四、研究成果
通过深入研究和实验验证,本次演示取得以下研究成果:
1、产品形态:清洗机器人采用智能遥控的方式,可以在工作人员的安全控 制下进行作业。此外,机器人还配备了高清摄像头和传感器,以便实时监测环境 变化和自身状态。
2、技术方案:采用双刷系统进行清洗,可以同时清洗玻璃的正反两面,提 高清洗效率。配合特有的真空吸附系统,使机器人在玻璃幕墙上来回移动更加稳 定。此外,引入人工智能技术,实现机器人的自动路径规划和避障功能。
展望未来,高空玻璃幕墙清洗机器人还有许多可以改进和完善的地方。首先, 可以在机器人的柔性机构和材料选择上做进一步的研究,提高机器人的抗风能力 和适应性。其次,可以引入更先进的传感器和控制系统,实现机器人的智能感知 和自主决策功能。最后,开展多元化应用场景的研究,将高空玻璃幕墙清洗机器 人应用于更多领域,如光伏板、建筑外墙等。
3、清洗效果:经过多次实验验证,该清洗机器人可以在短时间内完成大面 积的玻璃清洗任务,且清洗效果干净整洁。同时,机器人的工作不会对玻璃幕墙 造成任何损伤,具有很高的安全性。
五、总结与展望
本次演示成功设计了一款高效、安全的高空玻璃幕墙清洗机器人,解决了人 工清洗方式效率低下和安全隐患等问题。该机器人具有自动适应环境、清洗效率 高、操作简单、成本低廉等优点,在未来的高空玻璃幕墙清洗市场中具有广泛的 应用前景。
高楼玻璃幕墙清洁设备的设计

高楼玻璃幕墙清洁设备的设计摘要:我国目前已经成为了世界第一大幕墙生产与使用大国,但在幕墙制造蓬勃发展的同时,我国仍面临一个难以解决的问题,即玻璃幕墙的清洗工作。
本论文设计的清洗机,能够自动实现清洗,供水,提供清洗液等自动化功能。
通过特殊设计的清洗机构与风压机构,使得清洗机可以适应多种复杂墙面,稳定高效的完成各类幕墙的清洗工作。
关键词:高楼玻璃幕墙清洗设计方案引言玻璃幕墙作为一种兼具美观与实用功能的装修方式,随着我国城市的不断发展,逐渐被应用在各类建筑上,要维持玻璃幕墙良好的采光率就需要定期对玻璃幕墙进行清洗。
本论文设计的玻璃幕墙清洁设备,可实现无人操作工作,能够自动实现清洗,供水,提供清洗液等自动化功能。
1玻璃幕墙清洁的整体方案设计玻璃幕墙清洁设备的设计目标是能够清洗玻璃材质的幕墙并在垂直复杂的墙面上进行移动与控制。
行走机构通过电机驱动实现行走运动,清洗机构通过水泵把清洗液从水箱抽出实现清洗,楼顶行走借助外铺设导轨,使其沿导轨行走。
通过对比包括真空洗盘吸附、磁吸附以及风压式贴附等在垂直工作面保持与幕墙压力的方案后,选择了风压式贴附的最终方案。
此方案中,螺旋桨分压系统工作时会出现一个风压,如此处于墙面之上的设备可牢牢吸住,不会掉落,压紧盘刷还有滚刷,如此会有刷洗压力出现。
刷洗之时,在电机的作用下,刷子跟着转动。
刷子转动之后,会留下包络线的印记,确保墙面的整洁。
另外盘刷还能喷清水,把墙上的清洗液冲洗干净以保证墙面的清洁,避免对墙面的损坏。
2清洗机构设计玻璃幕墙清洁设备的清洗机构主要包括电机、盘刷、喷水机构和刮净器四部分组成,盘刷选择塑料材质,不仅具备较好的弹性,且刚度也非常不错,可以保证盘刷与墙壁之间的压紧力,进而保证清洗后墙面的清洁。
当墙面凹凸不平时,因为塑料毛有一定的弹性,可以确保盘刷能够墙面每一处。
喷水机构设计时为确保清洗液从喷嘴喷出之时,不会被盘刷转动所影响,选择了盘刷的固定通过滚动轴承来实现,盘刷需得连接空心轴的一端,还有一端连接水管,此时若盘刷体出现转动,空心轴依旧会保持稳定,将清洗液均匀喷出。
垂直平面清洗机清洗装置设计

垂直平面清洗机清洗装置设计垂直平面清洗机对高层建筑墙面进行清洗的关键技术是清洗机的载体方式及清洗技术。
文章设计了一种简单实用的垂直平面清洗机的清洗装置、对滚刷系统、水循环系统、清洗洁面装置、清洗工艺、清洗运动系统和动力传动系统等方面进行了系统的设计分析。
该机器动作平稳,清洗干净,工作效率高,能够替代清洁工高空作业,极具推广应用价值。
标签:清洗装置;垂直平面;结构设计在高楼林立的今天,高层建筑外墙的清洗已成为了热点问题。
传统清洁工人对高层外墙进行清洗,虽然简单易行,但危险系数相当危高,高空的强气流使人很容易产生晃动,工作环境恶劣,属于高空极限作业,对人身安全及其玻璃墙壁都有很大的威胁。
在国外,许多学者对垂直平面清洗机进行了研究。
日本BE公司[1]成功研制的了一种固定轨道式自动擦窗机器人,自动化程度十分高;德国的Fraunhofer研究所[2]研制了一种名为SIRIUSC壁面清洗机器人;美国国际机器人公司[3]研制了用于清洗摩天大楼的爬壁机器人“Sky Washer”。
国内相比国外来说发展较晚,从1975年后,才掀起研制机器人的热潮。
而目前一些国家和地区已经通过立法对包括擦窗作业在内的人工高空攀爬进行了限制。
因此此时急需要一种能够代替人工完成高层建筑清洗工作。
1 清洗装置系统方案设计清洗装置的系统要求具有动作平稳、清洗干净、操作简单、体积较小、重量较轻、节约能源、清洗速度快、不损坏被清洗物、无污染等特性。
根据现有的要求,通过给定设计任务将其抽象化,罗列出各种输入信号以及实现的结果,用黑箱图表示出来。
从黑箱图中确定清洗装置实现各项功能的转化工作原理。
在经过设计分析过程后,初步确定设计的垂直平面清洗机清洗装置的总体布局图,垂直平面清洗机清洗装置的总体布局图如图1所示。
2 清洗机构设计清洗机构是垂直平面清洗机清洗装置的核心部分,主要设计的部分由滚刷系统、水循环装置、清洗洁面装置等组成。
而且清洗机在工作的时候要保证不能把玻璃或者瓷砖刮伤、腐蚀或者留下明显的水渍斑点等,并且要求不能对环境造成污染,清洗效率要高,因此这部分清洗机构的好坏直接决定了垂直平面清洗机清洗装置的好坏,对于垂直平面清洗机的清洗效率的高低级清洗效果的好坏起着关键的作用。
高层住宅外墙清洗保养施工设计方案
高层住宅外墙清洗保养施工设计方案一、前言高层住宅外墙是建筑物的重要组成部分,不仅起到美化建筑外观的作用,还承担着保护建筑物结构、提供舒适居住环境的职责。
然而,长期暴露在外的外墙容易受到环境污染、雨水侵蚀、气候变化等因素的损害。
为了确保外墙的美观和性能,高层住宅外墙清洗保养施工设计方案的制定变得至关重要。
二、清洗保养工艺流程外墙清洗保养的工艺流程包括:准备工作、清洗处理、维修涂层保养。
具体步骤如下:1. 准备工作在进行外墙清洗保养前,需要充分准备。
包括:材料准备、设备准备以及安全措施的落实。
2. 清洗处理清洗处理是整个施工过程的核心环节。
根据外墙材料的不同,可采用高压水枪清洗、化学清洗或者喷砂清洗等方式进行清洗处理。
在清洗过程中,要注意保护周边环境和施工人员的安全。
3. 维修涂层保养清洗处理后,需要对外墙进行维修和涂层保养,以延长外墙的使用寿命和美观程度。
维修涂层保养的具体工艺包括:修补破损部位、涂刷底漆和面漆等。
三、材料选择在高层住宅外墙清洗保养的施工过程中,选择合适的材料是至关重要的。
以下是一些常用的材料:1. 清洗剂清洗剂的选择应根据外墙材料的不同而定。
对于混凝土、石材等材料,可选择酸性清洗剂;对于陶瓷、玻璃等材料,可选择碱性清洗剂。
2. 维修材料维修材料应具备耐候性、抗老化性能,以及与外墙材料相匹配的色彩和质感。
常用的维修材料包括填缝胶、修补砂浆等。
3. 涂层材料涂层材料应具备耐候性、耐污染性能,以及适合高层建筑外墙的防水性能。
根据具体需求,可选择乳胶漆、聚合物涂料等。
四、安全措施高层住宅外墙清洗保养施工过程中,应严格遵守相关的安全规定,确保施工人员和周边环境的安全。
以下是一些常见的安全措施:1. 施工人员需穿戴好防护装备,包括安全帽、安全绳、防滑鞋等。
2. 施工现场应设置警示标志,提醒周边人员注意安全。
3. 清洗过程中要注意与电线、天线等设施的安全距离,防止触电事故的发生。
4. 在高处作业时,必须使用安全绳索和安全网,确保施工人员的安全。
如何做建筑立面清洗专项方案设计
建筑立面清洗专项方案设计一、前言建筑立面清洗是对建筑外墙表面进行清洁、除垢、防霉、保护等维护工作的过程。
随着城市建筑的不断发展,建筑立面越来越成为城市的一道风景线,而建筑立面的清洁维护工作也日益引人关注。
本次设计的建筑立面清洗专项方案旨在为各类建筑提供合理、科学的清洗方案,保证建筑的外观质量和用途。
二、方案设计内容1.清洗方式建筑立面清洗一般可采用机械清洗、化学清洗和高压水清洗等方式。
根据建筑材料、污染程度和清洗难度等因素的不同,可选择不同的清洗方式。
(1)机械清洗:适用于建筑外墙较为坚硬的石材、陶瓷等材料,可采用喷砂机、高压水枪等设备进行清洗,能够有效地去除建筑表面的附着物和尘土。
(2)化学清洗:适用于建筑外墙表面有污渍、霉斑和油渍等情况,可采用专用的清洗剂进行处理,达到清洗效果。
(3)高压水清洗:适用于建筑外墙表面有轻微污染的情况,可采用高压水枪进行清洗,快速高效地清洗建筑立面。
2.清洗周期建筑立面的清洗周期一般根据建筑的材料、环境条件和污染程度等因素而定。
一般建议每年进行一次定期清洗,以保证建筑立面的清洁和光亮。
3.环保措施在进行建筑立面清洗时,应注意保护环境,防止污染。
可采取以下环保措施:(1)选择无毒、无害的清洗剂,减少对环境和人体的影响。
(2)避免清洗剂溢流到地面和水体中,采取合适的排放处理方法。
(3)对清洗废水进行合理处理,保证清洁。
4.安全措施在进行建筑立面清洗时,应做好安全措施,确保作业人员和建筑物安全。
可采取以下安全措施:(1)作业人员应穿戴好防护装备,如防护眼镜、手套等。
(2)在清洗作业区域设置警示标志,保证作业人员和行人的安全。
(3)建立清洗作业计划,明确作业程序和责任,确保作业顺利进行。
5.维护保养建筑立面清洗后,应及时进行维护保养工作,延长建筑立面的使用寿命。
可采取以下措施:(1)定期检查建筑立面的状况,及时修补危险部位和损坏部分。
(2)建筑立面上的植物、广告牌等要定期清理,避免影响清洁效果。
清洁高层外墙工程方案设计

清洁高层外墙工程方案设计一、项目概况在城市高层建筑外墙清洁工程中,我们常常会面临各种困难,比如作业高度大、作业面积广、操作不便等等,因此,在进行高层外墙清洁工程时,我们需要认真设计工程方案,做好施工准备工作,确保工程的顺利进行,为居民创造一个干净、美观的生活环境。
二、清洁工程方案设计1. 工程任务本次清洁工程主要任务是对高层建筑外墙进行清洁,包括清洗外墙、擦洗玻璃幕墙、清理外墙上的污渍以及维护外墙保温层等。
2. 工程范围本次清洁工程涉及的范围包括高层建筑外墙以及玻璃幕墙,清洁的范围包括外墙表面的污渍、尘土等。
3. 工程难点本次清洁工程的难点在于高层建筑外墙的高度和作业面积广,以及操作不便的情况。
4. 工作条件在进行高层建筑外墙清洁工程时,需要根据实际情况对作业条件进行评估,包括地形、交通、通风等方面的条件。
5. 工作流程本次清洁工程的工作流程主要包括准备工作、作业准备、安全防护、作业执行以及清洁完工后的收尾工作。
三、准备工作1. 设备准备根据工程要求,准备清洁设备,包括清洁剂、清洁喷枪、清洁刷子、清洁车辆、高空作业平台等。
2. 人员准备安排专业的清洁人员进行作业,对现场作业人员进行安全培训和操作培训。
3. 材料准备根据工程要求准备清洁所需的辅助材料,包括清洁布、擦洗刷子、清洁剂等。
四、作业准备1. 工作周边环境评估在进行高层建筑外墙清洁工程时,需要对工作周边环境进行评估,包括地形、河流、交通、通风等方面的条件。
2. 安全检查对作业场所进行安全检查,确保作业场所的安全,包括安全防护设施的齐全、安全通道的畅通等。
3. 通风噪音控制在清洁作业期间,需要对作业现场的通风、噪音等进行控制,确保作业现场的安全和卫生。
五、安全防护1. 安全培训对作业人员进行安全培训,包括高空作业的安全知识、作业技能、应急处理等。
2. 安全设施在作业现场设置安全设施,包括安全带、安全网、安全绳索等,提供作业人员的安全保障。
3. 防护措施在作业现场设置警示标志,确保作业人员的安全。
外墙清洁工程保洁方案设计
外墙清洁工程保洁方案设计一、方案背景随着城市建设的不断发展和房地产行业的蓬勃发展,越来越多建筑物外墙面临着污垢和灰尘的问题。
这些污垢和灰尘不仅严重影响了建筑物的美观,而且对建筑物的保护也产生了较大的压力。
因此,外墙清洁工程保洁方案的设计显得尤为重要。
二、方案目标1. 对外墙进行定期清洁和保养,保持建筑物外墙的清洁整洁;2. 提高建筑物外观的美观度,提升城市形象;3. 增加建筑物的使用寿命;4. 提高建筑物的安全性;5. 降低外墙维护成本。
三、方案内容1. 外墙清洁工程保洁设备(1)高压水枪:用于清洗外墙表面的顽固污垢和污渍。
(2)洗刷机:用于对外墙进行全面、彻底的清洁,可根据实际情况选择刷毛的硬度和长度。
(3)擦窗机:可以对高层建筑进行外墙清洁作业,提高效率。
(4)作业平台:可以对高层外墙进行清洁和维护,保障安全。
2. 外墙清洁工程保洁作业流程(1)清洁前准备工作对所有设备进行检查,确保设备安全可靠。
对工作区域进行勘察,找出存在的隐患并进行通告。
进行清洁用水和清洁药物的调配。
(2)外墙清洁根据外墙的材料和污染程度,选择合适的清洁方式。
对于较为顽固的污垢,可以使用高压水枪进行清洗;对于各种类型的墙面,采用不同的清洁剂进行温和清洗;对于高层建筑,通过作业平台或擦窗机进行清洁作业。
(3)检查与修复对外墙表面进行细致检查,收集外墙损坏和脱落情况,并及时进行修复,确保外墙整体质量。
(4)外墙保养在清洁作业完成后,对外墙进行保养工作,如进行防水、防腐、防晒等处理。
(5)清洁完成清洁作业完成后,对工作区域和设备进行清理,做好日常维护工作。
3. 外墙清洁工程保洁人员培训要求对参与清洁工程保洁的人员进行专业培训,包括清洁设备的操作和维护、外墙材料的特性和清洁方法、安全防护措施、紧急处理等方面的培训,确保工作安全、高效完成。
四、方案实施计划1. 制定清洁作业计划对建筑物外墙进行定期清洁和维护,建立清洁作业计划,按照实际情况制定清洁频次和清洁方式。
高楼外墙清洁设备
高楼外墙清洁设备随着城市的发展和建设,高楼大厦已经成为了城市的标志之一。
随之而来的是高楼外墙的清洁与维护问题,由于外墙清洁难度大、安全风险高,传统清洁方式已经难以满足需求。
现代高楼外墙清洁设备应运而生,为城市的建筑美观和保洁提供了可靠的解决方案。
1. 高空清洁机高空清洁机是一种专门用于高楼外墙清洁的设备,具有可移动性强、灵活度高的特点。
它可以根据建筑物的高度和外墙结构自由调整工作高度和角度,能够有效清洁各种形状和结构的外墙表面。
高空清洁机具有高效、安全、可靠的特点,能够满足高楼外墙的定期清洁和维护需求。
2. 爬升式清洁设备爬升式清洁设备是一种通过爬升机构来实现高楼外墙清洁的设备,其主要特点是通过升降装置和伸缩臂实现外墙表面的清洁。
该设备适用于外墙结构复杂、高度较高的建筑物,具有操作简单、安全可靠的特点。
3. 空中吊篮空中吊篮是一种通过吊索系统将清洁人员悬挂在高空作业的设备,适用于高楼外墙清洁和维护。
空中吊篮具有作业平稳、操作便捷的特点,能够有效保障清洁作业人员的安全,并可以根据建筑物的高度和外墙结构调整作业位置和角度。
二、高楼外墙清洁设备的优势1. 提高工作效率传统的高楼外墙清洁方式主要依靠人工爬楼梯或悬挂索具等方式进行作业,工作效率低、安全风险大。
而高楼外墙清洁设备具有高效、快速的特点,能够大幅提高清洁工作的效率,降低清洁成本。
2. 保障清洁人员安全高楼外墙清洁作业存在很大的安全风险,传统方式下清洁人员需要面对高空作业、气候变化等多种风险。
而高楼外墙清洁设备配备有安全保护装置、紧急救援系统等,能够有效保障清洁人员的安全。
3. 适用范围广高楼外墙清洁设备能够适用于各种形状和结构的建筑物外墙清洁,具有很强的适用范围。
无论是平面外墙、立面造型外墙还是其他特殊外墙结构,高楼外墙清洁设备都能够有效地进行清洁和维护。
4. 环保节能现代高楼外墙清洁设备采用先进的清洁技术和设备,具有节能、环保的特点。
高空清洁机采用高效喷水清洁技术,有效降低了水资源的浪费;爬升式清洁设备采用电动或液压动力系统,能够大幅减少能源消耗。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录1. 引言 (2)2. 课题任务 (4)2.1 主要内容 (4)2.2 技术要求 (4)2.3 成果要求 (4)2.4 其他要求 (4)3. 同类课题考察 (5)3.1 高层建筑外墙清洗机现状 (5)3.2 高层建筑外墙清洗机发展趋势 (7)4. 总体方案拟订 (8)4.1 对楼顶楼面的实际考察 (8)4.1.1 楼面结构考察 (8)4.1.2 楼顶结构考察 (9)4.2方案选择与原理 (10)4.2.1总体方案的确定 (10)4.2.2总体方案内容 (13)4.2.3材料选择 (13)4.2.4轮的润滑问题 (14)4.2.5轴承的润滑问题 (14)5 重要零部件的设计与计算 (14)5.1刷洗部分设计 (14)5.1.1清洗速度的确定 (14)5.1.2 盘刷部分 (14)5.1.3电机的选择 (16)5.1.4刷洗部分所用弹簧的设计计算 (17)5.2内空心轴的设计 (17)5.3 清洗机主机滚轮的设计计算 (18)5.4 主机上传感器及行程开关的选择 (18)5.5复合缆的结构设计 (19)5.6风压系统的设计计算 (20)5.6.1采用风压的意义 (20)5.6.2 基本原理 (20)5.6.3气动计算的原始数据与技术要求 (20)5.6.4结构设计及相关数据计算 (21)5.6.5抛物线中线 (23)5.7齿轮副的确定和检验 (24)5.7.1直齿轮的计算 (24)5.7.2.锥齿轮副的设计计算 (30)6 设备的使用与维护 (34)6.1 使用方法 (34)6.2 使用注意事项 (35)6.3 日常维护与维修 (35)7 CAD使用体会 (36)参考文献 (38)1. 引言随着社会进步,经济与科技的发展,城市规模越来越大,建筑越来越高,以至摩天大厦比比皆是。
高层建筑更是成了一个城市面貌的核心内容,但是由此导致的城市形象问题也日趋严重,尤其是在工业城市,这种问题更是突出。
靓丽的新大楼,不用多久,外表便成为灰暗一片,严重影响了城市的面貌。
因此为了保持良好的城市形象,城市高层建筑的清洗工作在各大城市尤其是首都、省会等国际性大都市已经成为直接影响城市形象的问题。
高层建筑由于高空作业,给清洗工作带来了极大的不方便。
目前,我国大多数高层建筑清洗工作还是由人力完成,这类清洗工作主要由工人搭乘吊篮进行高空作业来完成,工人的环境恶劣,且有一定的危险性,工作效率低,成本高,耗时长,随着机器人技术的出现和发展以及人们自我保护意识的增强,人们迫切希望能用机器人代替人进行这些高空极危险的作业,从而把人类从恶劣的环境和繁重的劳动中解脱出来。
针对这种种问题,本清洗机采用无人化清洗,自动清洗,自动供水,供清洗液。
单片机系统控制,操作人员只需通过键盘即可操纵清洗机工作,而且在清洗过程中,清洗机能够自动进行边缘识别,可根据建筑楼层的具体情况选择为纵洗或横洗。
本机的清洗效率较高,清洗效果良好,是高层建筑理想的清洁工具。
本机的使用将大大降低高层建筑的清洗成本,改善工人的劳动环境,提高劳动生产率,其有相当的社会效益、经济意义和广阔的应用前景。
本机器是通过对国内外同类产品考察比较后精心设计而成,使用稳定可靠,但不足之处在所难免,所以恳请老师、同学及各位同行提出宝贵意见。
2. 课题任务2.1 主要内容高层建筑外墙清洗机主要由伺服悬吊系统、清洗主机和由计算机控制系统组成,本人主要承担清洗主机设计,设计中应考虑为清洗提供足够的压墙力、刷洗部件设计、清洗液的喷洒和脏液体的收集、对左右边缘和上下行程的识别、行走机构和转位机构的设计,进行必要的设计计算。
2.2 技术要求1)清洗效率0.2平方米/s左右,清洗宽度0.8~1m,楼房高度在120米左右。
2)移动机构要小型、高效,使机器人可以在壁面上移动。
并可灵活、自如调节行走的速度和方向。
3)设计安全有效的清洗机构,识别清洗质量,达到令人满意的清洗效果。
边缘识别机构:要能实现左右,上下边缘识别。
4)选择压紧力产生原理,设计相应的压紧机构,给清洗机构提供有效的压紧力。
5)尽量选取轻型材料,使整机尽量轻便。
2.3成果要求1)毕业设计前期工作材料。
一份。
2)高层建筑外墙清洗机主机装配图一张(零号)3)清洗机零件的强度校核4)高层建筑外墙清洗机零件图。
5)设计说明书一份(不少于2万字,包括英文翻译)。
2.4 其他要求1)适用于清洗平面,圆弧面外墙和玻璃表面2)刷洗压力根据不同表面调节;3)刷洗部件应能调换;4)设备实现边缘识别;5)清洗机的体积尽量小,尽量轻。
6)机体装配时应根据图纸要求简单容易的装配,维修容易,不需专门工具。
7)尽量使用标准件,对非标准件,应尽可能工艺简单,加工容易。
3. 同类课题考察3.1 高层建筑外墙清洗机现状机器人工程正在迅速地从工业领域转移到服务领域。
它的潜力非常大,它能够代替人类在许多危险和受污染的地方做重复或繁重的工作,对老年人或者患病者进行长期持久的关怀和照顾,客运和货运,野外营救,精密手术,清洗对人体有害的或无法进入的事物(比如说清洗油箱)等等。
高层建筑外墙壁面清洗机是特种机器人的一种,其必须具有两种功能:即在壁面上的吸附功能和移动功能,由于建筑物表面的非导磁性,清洗壁面机器人多采用正压和负压两种吸附结构。
其中负压吸附又成为真空吸附,由风扇、真空泵、空气压缩机等使吸盘内产生负压,依靠压差将机器人吸附在墙面上。
真空吸附式壁面移动机器人又可分为单吸和多吸两种结构,单吸盘真空吸附壁面机器人可实现小型化,轻量化,且结构简单,易于控制,多吸盘脚式壁面爬行机器人的吸附稳定可靠。
九十年代最新研制成功地推进型壁面机器人,采用直升机原理,利用螺旋桨产生的高速气流带动机器人向上高速移动,螺旋桨所产生的推力与壁面大约成20度角,始终有指向壁面的推力从而实现机器人的吸附功能,使机器人可以实现紧贴壁面移动,有一定的越障能力。
目前已有报道的高层建筑擦窗机还有以下几种:日本BE公司研制成功的一种固定轨道式全自动擦窗机器人,靠安装在楼顶的轨道及吊索系统使擦窗机对准窗口,沿固定安装在建筑物表面导槽垂直上下移动进行自动清洗。
北京航空航天大学与北京铁路局合作研制的擦窗样机,有八个吸盘,采用“十”字框架式结构,上有驱动装置,可驱动两框架做相对运动以实现壁面机器人在固定墙面上沿X,Y方向移动。
上海科技大学机器人研究所研制的双足式爬壁机器人,与步行式两足机器人比较,结构较为简单,省略膝关节,通过脚腕的倾斜和圆规脚的开闭适当结合起来,即可翻越一定的台阶,对诸多复杂环境具有适应性。
哈尔滨工业大学机器人研究所研制成功的清洗高层建筑瓷砖壁面或玻璃幕墙的壁面清洗爬壁机器人。
该机器人吸附方式为负压吸附,移动方式为轮式,移动速度为1-8米/分。
采用有线遥控,计算机控制。
曾向深圳、香港试销二台,反映较好。
最新研制成功的Ⅱ型样机,具有以下特点:实现了控制器的小型化,可直接安放于机器人本体上,减小了体积;1)采用电力线载波通讯进行遥控,减少了控制电缆数量,提高了机器人的爬高能力;2)采用喷雾、刷洗与多层橡胶板刷洗工序的综合清洗机构,对清洗玻璃幕墙十分有效。
该机器人采用负压吸附、双轮驱动、气垫密封结构、有线遥控与专用清洗机构,满足了可靠吸附,灵活移动和高效清洗的要求,设计是成功的,并在解决密封,遥控和清洗等关键技术上创新。
除此之外,我们分别在图书馆,专利局,网络等各种途径还搜集到以下资料:①壁面清洗机器人及其控制系统刘淑良邵浩高波杨宏赵炎正王言(哈尔滨工业大学)《黑龙江自动化技术及应用》1997.3②高楼壁面清洗机器人及其相关技术的研究刘淑霞赵炎正王言(哈尔滨工业大学机器人研究所)《技术纵横》③爬壁机器人技术应用刘淑霞《机器人》1999. 2④高层建筑墙面自动清洗装置设计人:项中贷专利号:96205687.1⑤高层建筑外墙清洗机设计人:蒋崇伟专利号:96228332.0⑥垂直壁面行走机器人系统研制谈力士沈林勇陈振华⑦组合式高楼外墙清洗机(网上查询)⑧硬平整表面的清洗设备(美国专利)⑨壁虎式自动擦窗机⑩高层智能化墙体清洗机设计人:马骥专利号:95219263.2从以上调研的情况看,清洗对象主要是墙面,其次是圆弧面和一些不规则的墙面;其壁面材料为瓷砖,玻璃幕墙,喷涂面,其中以瓷砖和喷涂面为多,故设计时可重点考虑这两种材料的墙面;3.2高层建筑外墙清洗机发展趋势由于清洗工作环境及任务的特殊性,清洗爬壁机器人的总体设计要求相当苛刻。
其总的设计原则是:减轻重量,降低造价,安全可靠,能适应多种建筑物表面,且要有足够高的清洗效率。
从清洗机的工作环境来看,其主机可能有两个发展方向:其一:是应与凭证瓷砖和玻璃幕墙清洗,它结构简单,易于控制,属小型轻量化。
其二:适应于复杂墙面,如阶梯墙面,壁面多窗户的壁面清洗,它的结构、动作、控制都很复杂。
其三:以壁面机器人为载体,配以专用的清洗机构,可以适应不同壁面机构。
4. 总体方案拟订4.1 对楼顶楼面的实际考察在接受课题之后,为了顺利地完成我们的毕业设计任务,我们参观了省会石家庄几处典型的高层建筑。
并且查阅了多种关于高层建筑和以往对建筑物的清洗的相关资料,其中大部分是难以人工清洗的,因此设计开发高层建筑外墙清洗机是非常必要的。
4.1.1 楼面结构考察参观调查得到初步方案,清洗机主要由楼顶的随动小车和清洗主机部分组成,并且采用单片机控制。
楼顶的随动小车在楼顶上预装的轨道上行走,可使悬吊的清洗机部件实现纵洗和横洗;清洗机部件利用风压使之贴在墙壁上,通过盘刷和滚刷完成清洗墙面的工作。
因此,楼面情况就决定了我们如何设计轨道、变向、压紧和清洗液的输送、回收等问题。
几种典型建筑物楼面结构如图4-1:4.1.2 楼顶结构考察几种典型建筑物楼顶结构如图4-2:4-2 几种典型建筑物楼顶结构4.2方案选择与原理4.2.1总体方案的确定根据以上提出的技术性能及要求,初步确定总体方案如下:清洗机主体贴在垂直墙面上,清洗液通过水泵从水箱抽出,喷在外墙上,自动电机驱动轮子及主清洗机行走;楼顶铺有导轨,随动小车沿导轨与清洗主机随动。
我们经过认真考虑及分析确定以下方案:第一种:结构简图如图4-3:图4-3 方案一此种方案采用负压履带吸盘式盘滚组合式清洗,由于受到墙表面材料的影响较大,一般情况下,每两块瓷砖之间都有4~5毫米的缝隙,密封不可靠。
第二种:结构简图如图4-4:图4-4 方案二这种方案采用了风压式压紧,盘滚组合式清洗,清洗效率高,可靠性高,可以采用。
但由于中间传动的需要,结构不对称,风扇的中心与刷子的中心不重合,刷洗压力不均匀,中心不稳定,容易引起震动问题。
但可以考虑配重问题。
第三种:结构简图如图:这种方案吸取了第二种方案的优点,传动的改变,使振动的问题减小,机体尺寸减小。