基于单片机模拟红外编码解码的设计
基于单片机的红外遥控解码器设计
毕业论文(设计)论文(设计)题目:基于单片机的红外遥控解码器设计所属系别信息工程系专业班级 10大专电子信息工程技术2班姓 名学 号指导教师撰写日期 2013 年 4月本设计是一种以单片机和一体化红外接收器为核心,由单片机最小系统、通信模块、红外接收模块和液晶显示模块组成。
通过红外遥控接收头HS0038将光信号转变成电信号,经放大、解调、滤波后,将遥控脉冲波形送入单片机AT89S52中,利用相应的硬件滤波功能和软件滤波算法,对的输出信号进行信号识别、解码的实时动态处理,得到红外遥控器相应按键键码,单片机将得到的数据送入显示驱动电路,再通过LCD1602更直观的显示出来,实现单片机的红外解码。
经过解码后,可以将多种遥控器进行合成,实现一个遥控器控制多台电器设备。
即减少了遥控器的数量,同时又增强了遥控器的功能。
通过对电路的设计和实际调试,可以在液晶显示模块显示出来红外源码,从而验证了本设计是可行的。
关键词:AT89S52,红外接收HS0038,红外解码The design is a microcontroller and integrated infrared receiver as the core, from the smallest single-chip system, the communication module, the infrared receiving module and liquid crystal display module. Receiving head HS0038 the light signal is converted into electric signal through the infrared remote control, after amplification, demodulation, filtering, remote control pulse waveform into the SCM AT89S52, using the corresponding hardware filter and software filtering algorithm, the output signal of the signal recognition, real-time dynamic processing of infrared remote control decoding, obtained the corresponding key code, SCM will get data into the display driving circuit, and then through the LCD1602 display, infrared decoder chip. After decoding, can be a variety of remote controller synthesis, the realization of a remote control a plurality of electric equipment. Namely, reducing the number of remote control, and strengthen the function of the remote controller. Through the circuit design and debugging, in the liquid crystal display module display infrared source, which verified the design is feasible. Keywords: AT89S52, infrared receiver HS0038, infrared decoder1 引言 (1)2 总体设计方案 (1)2.1 方案论证 (1)2.2 总体设计框图 (1)3硬件电路设计 (2)3.1 单片机及其硬件电路设计 (2)3.1.1 单片机的介绍 (2)3.1.2 时钟电路及RC复位电路 (3)3.2 红外遥控器电路设计 (4)3.2.1 TC9012芯片介绍 (4)3.2.2 红外发射电路 (5)3.2.3 红外接收电路的设计 (7)3.3 1602液晶显示电路 (8)3.3.1 引脚功能说明 (9)3.3.2 指令说明 (9)4程序设计 (10)4.1 红外接收电路主程序流程图 (10)4.2 红外接收电路子程序流程图 (10)5结果分析与讨论 (12)5.1 测试仪器 (12)5.2 硬件调试的方法和过程 (12)5.3 软件调试问题及解决方法 (12)6总结 (13)参考文献: (14)致谢 (15)附录1: 系统电路原理仿真图 (16)附录2: 系统电路实物图 (17)附录3: 程序 (18)1 引言随着电子技术的发展,红外遥控器越来越多的应用到电器设备中,比如电视机、DVD机、空调、机顶盒甚至音响、热水器等都用到遥控器,而这些红外遥控器都是针对各自产品所设计的,从而导致了一般家庭中拥有数个遥控器,那么,能否将这些遥控器的功能进行复用,进而减少遥控器的数量,使遥控器的功能更加强大,就显得十分必要了。
基于单片机的红外遥控解码器的设计

基于单片机的红外遥控解码器的设计作者:苏宝林来源:《中国科技博览》2014年第08期摘要:通过对红外遥控器各按键发送的脉冲波形的分析可以识别码型,从而为软件解码提供依据。
本设计用单片机编码和解码实现了红外信号的传输,该电路结构灵活,成本低,易于改进和扩充,该电路设计简单,易于移植到其他红外发射、接收装置,适合红外遥控的二次开发。
关键词:AT89S51单片机;红外信号;1602LCD中图分类号:TM 文献标识码:A 文章编号:1009-914x(2014)08-01-011红外解码系统的背景、意义1.1红外解码系统的背景传统的遥控器大多数采用了无线电遥控技术,随着科技的进步,红外线遥控技术的成熟,红外也成为了一种被广泛应用的通信和遥控手段。
继彩电、录像机之后,在录音机、音响设备、空调机等电器装置上也纷纷采用红外线遥控。
工业设备中,在高压、辐射、有毒气体、粉尘等环境下,采用红外线遥控不仅完全可靠而且能有效地隔离电气干扰。
红外线抗干扰能力强,且不会对周围的无线电设备产生干扰电波,同时红外发射接收范围窄,安全性较高。
红外遥控虽然被广泛应用,但各产商的遥控器不能相互兼容。
当今市场上的红外线遥控装置一般采用专用的遥控编码及解码集成电路,所以其灵活性较低,应用范围有限。
而采用单片机进行遥控系统的应用设计,遥控装置将同时具有编程灵活、控制范围广、体积小、功耗低、功能强、成本低、可靠性高等特点,因此采用单片机的红外遥控技术具有广阔的发展前景。
1.2红外解码系统的意义红外遥控的特点是不影响周边环境、不干扰其它电器设备。
由于其无法穿透墙壁,所以不同房间的家用电器可使用通用的遥控器,且不会产生相互干扰。
电路调试简单,只要按给定电路连接无误,一般不需任何调试即可投入工作,编解码容易,可进行多路遥控。
信息可以直接通过红外光进行调制传输,例如,信息直接调制红外光的强弱进行传输,也可以用红外线产生一定频率的载波,再用信息对载波进行调制,接收端去掉载波,取到信息。
基于单片机的红外遥控解码器的设计

将脉冲 编码信号调 制在 载波振荡器 产生 的载波上 , 然后用这 个脉冲 编码调 制 信号 去驱 动红 外发光 二 极管 , 以发 出经过调 制 的红 外光 波 。 T C 9 0 1 2 作 为红外 遥控 器控 制核心 , 遥控编 码 脉冲信 号 由引导 码 、 系统 码 、
靠而且能有效地隔离电气干扰。 红外线抗干扰能力强, 且不会对周围的无线电
1红 外解 码 系统 的背 景 . 意 义
1 1红 外解 码系统 的背 景
T C 9 0 1 2 采用低 压 C MO S 工 艺制 造 , 低功耗 超 小静态 电流 , 低工 作 电压 , 精 简 指令 码 , 8 种用 户 编码 可选 择 , T S O P - 2 0 、 S O P 2 0 、 C O B 可选 的封 装 形式 。
工 业技 术
I ■
C h i n a s c i e n c e a n d T e c h n o l o g y R e v i e w
基 于 单 片机 的 红 外 遥 控 解 码 器 的 设 计
苏 宝林
( 绥化 学 院 电气工 程学 院 黑 龙江 绥化 1 5 2 0 6 1 ) [ 摘 要] 通过 对红 外遥 控器 各 按键 发送 的 脉冲 波形 的分析 可 以识 别码 型 , 从 而为 软件 解 码提 供依 据 。 本 设计 用单 片机 编码 和 解码 实现 了 红外 信号 的传 输 该 电路结 构灵 活 , 成 本低 , 易 于改进 和 扩充 , 该 电路设 计 简单 , 易 于移植 到 其他 红外 发射 、 接 收装 置 , 适合 红外 遥控 的二 次开 发 。 [ 关键 词] AT 8 9 S 5 1 单 片机 , 红外 信 号 , 1 6 0 2 L C D 中 图分类号 : TM 文献 标识 码 : A 文 章编号 : 1 0 0 9 —9 1 4 X( 2 0 1 4 ) 0 8 — 0 0 5 4 — 0 l
单片机STM32F103C8T6的红外遥控器解码系统设计
单片机STM32F103C8T6的红外遥控器解码系统设计一、本文概述本文旨在详细阐述基于STM32F103C8T6单片机的红外遥控器解码系统的设计和实现过程。
随着科技的不断进步和智能化设备的普及,红外遥控器作为一种常见的遥控设备,已经广泛应用于家电、安防、玩具等多个领域。
然而,红外遥控器发出的红外信号往往需要通过解码器才能被设备正确识别和执行,因此,设计一款高效、稳定、可靠的红外遥控器解码系统具有重要意义。
本文将首先介绍红外遥控器的基本原理和信号特点,然后详细阐述STM32F103C8T6单片机的性能特点和在红外遥控器解码系统中的应用优势。
接着,将详细介绍红外遥控器解码系统的硬件设计,包括红外接收头的选择、电路设计和PCB制作等。
在软件设计部分,将详细阐述如何通过STM32F103C8T6单片机的编程实现红外信号的接收、解码和处理,以及如何将解码后的数据通过串口或其他通信方式发送给主控制器。
本文还将对红外遥控器解码系统的性能进行测试和分析,包括信号接收距离、解码速度和稳定性等方面的测试。
将总结本文的主要工作和创新点,并对未来的研究方向进行展望。
通过本文的研究和实现,旨在为红外遥控器解码系统的设计提供一种新的思路和方法,同时也为相关领域的研究人员提供有益的参考和借鉴。
二、红外遥控器基础知识红外遥控器是一种常见的无线遥控设备,它利用红外光作为信息载体,通过发射和接收红外光信号实现对设备的远程控制。
这种遥控方式因其简单、低成本和无需视线连接等优点,在各类消费电子产品中得到了广泛应用,如电视机、空调、音响等。
红外遥控器的工作原理主要基于红外辐射和光电器件的检测。
遥控器内部通常包含一个或多个红外发射管,当按下按键时,发射管会发射出特定频率和编码的红外光信号。
接收端则配备有红外接收头,该接收头内部有一个光敏元件(如硅光敏三极管或光敏二极管),用于检测红外光信号并将其转换为电信号。
为了区分不同的按键操作,红外遥控器通常采用特定的编码方式对按键信号进行编码。
基于单片机的红外遥控器解码器的设计

}—一 16如,—叫4‰或1 w=u叫’刚,c9
图4 第二以后连续发送的遥控信号的编码脉冲
由图2和图3可以看出,遥控编码脉冲波形的输出时 间为192瓦,或224 Tc,,以为用户码(8位)的输出时间。当 口≥26 Tc,时,遥控编码脉冲波形输出时间为224Tc,。另 外,对于连续发送的编码脉冲中用户码第一位的相反码的 脉冲问隔时间,当SO一“1”时,则So一“0”,该时间为
3单片机程序设计
单片机程序主要解决的问题就是如何对接收到的 9021型红外遥控器所发射的信号进行解码,编码脉冲信 号是由引导码、用户码、和功能码等部分组成,我们只对获 取其功能码过程进行分析。在单片机设置中,将单片机 AT89C5l内部定时器/计数器To设为定时方式1,定时时 间为1 ms;设外部中断INTo为下降沿中断触发方式,由
116622)
摘 要:9012型红外遥控器被广泛用在家用电器和仪器仪表中,在了解了其发射的编码脉冲信号波形后,设计了基于单
片机AT89C51的红外遥控器解码器,对解码器硬件和相应软件进行分析并给出程序流程图。将红外遥控器用在生产即时
显示系统中,作为参数设置和系统控制用红外遥控器,既操作灵活方便,又能提高系统抗干扰能力,在实际中收到了良好
图3 Matlab中滤波前后结果
4结 语
一般DSP芯片实现FIR滤波器时,常是先在Matlab 中设计要求的滤波器,得到滤波器系数,在目标DSP汇编 程序中,对系数进行相应的Q格式转换,再用相关汇编指 令实现FIR滤波器算法。但在调试时,每改变一次滤波器
参数,相关系数也改变,目标DSP中的程序也要做相应改 变,给调试仿真带来很大麻烦,使滤波器设计效率很低。 Matlab具有强大的数值分析、计算、信号处理及图形显示 功能,并为用户提供了强大的信号处理工具箱和友好方便 的交互式图形用户界面,用Matlab辅助DSP实现FIR,在 滤波器系数改变时可以不必改变DSP中程序,大大提高 了滤波器设计效率。本文只是利用Matlab辅助DSP实现 了一个简单的FIR低通滤波器,并在TMS320C6713 DSK 上成功运行。还可以利用Matlab辅助DSP来实现比较复 杂的诸如语音处理、通信、图像处理等方面的程序开发,可 以大大缩短DsP应用程序的开发时间,提高设计效率,这 也是以后DSP设计的一个趋势。
基于单片机的红外通信系统设计
基于单片机的红外通信系统设计1 简介红外通信是指利用红外线进行信息传输的一种无线通讯方式。
其传输距离在10米以内,速度较快,常用于遥控器、智能家居、安防监控等领域。
本文将介绍基于单片机的红外通信系统设计。
2 系统原理红外通信系统需包含红外发射器、红外接收器和处理器三个部分。
通信原理是将信息编码成红外信号,通过红外发射器发出,再由红外接收器接收,经过解码后传输到处理器中处理。
3 系统设计步骤3.1 红外接收器电路设计红外接收器采用红外管接收器,其特点是灵敏度高,在不同角度能接收到较远的红外信号。
红外管接收器与电路板焊接,电路板再选用较长的电线接到处理器的端口上。
3.2 红外发射器电路设计红外发射器采用红外二极管,其工作电压一般为1.2-1.4V。
通过接通1kHz以上的方波信号控制二极管的导通,使其发出红外光。
为保证其稳定性和较远的有效距离,需在电路中添加反向电流保护二极管。
3.3 处理器设计处理器选用常用的单片机,如AT89C51等。
单片机内置了红外通信模块,可用来发送和接收红外信号。
同时,还需通过编程实现对红外信号的解码和编码,实现信息传输与处理。
4 系统测试测试时,可用遥控器模拟发送红外信号,系统接收并解码后显示在液晶屏幕上。
测试距离一般在10米以内,且需保持天空无其它遮挡物。
5 总结基于单片机的红外通信系统设计,具有灵敏度高、速度快、传输距离短等特点。
其应用广泛,在智能家居、安防监控、车载通信等领域均有应用。
但需注意遮挡物的影响,以及信号干扰等问题。
基于单片机的红外遥控器解码器设计
中 图 分 类 号 :TN21
文 献 标 识 码 :A
文 章 编 号 :1672-3791(2010)03(a)-0051-03
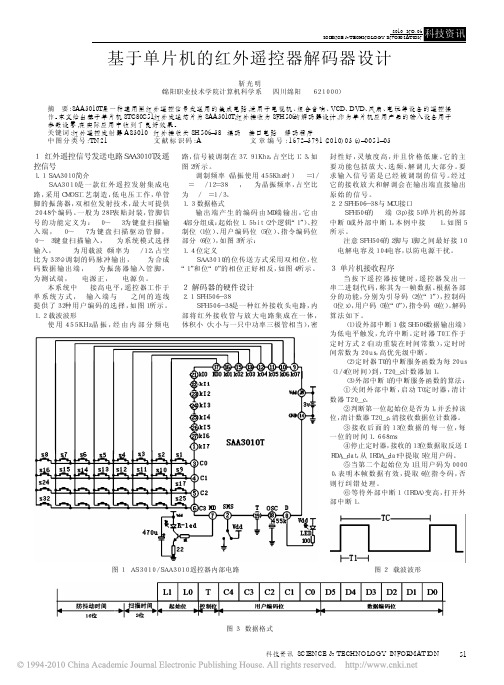
1 红外遥控信号发送电路SAA3010T及遥 控信号
1.1 SAA3010 简介 SAA3010是一款红外遥控发射集成电
路,采用CMOS工艺制造,低电压工作,单管 脚的振荡器,双相位发射技术,最大可提供 2048 个 编 码 。一 般 为28P 表 贴 封 装, 管 脚 信 号的功能定义为:KI0~KI3为键盘扫描输 入端,KO0~KO7为键盘扫描驱动管脚,C 0~C3键盘扫描输入,SMS为系统模式选择 输入,MDout为用载波(频率为fc/12,占空 比为33%)调制的码脉冲输出,Dout为合成 码数据输出端,OSC为振荡器输入管脚,T 为测试端,VDD电源正,VSS电源负。
工 程 技 术
科技资讯 2010 NO.06
SCIENCE & TECHNOLOGY INFORMATION
基于单片机的红外遥控器解码器设计
靳光明 ( 绵阳职业技术学院计算机科学系 四川绵阳 6 2 1 0 0 0 )
摘 要:SAA3010T是一种通用型红外遥控信号发送用的集成电路,适用于电视机、组合音响、VCD、DVD、风扇、电玩等设备的遥控操
(1)设外部中断1(接SH506数据输出端) 为 低 电 平 触 发 , 允 许 中 断 。定 时 器 T 0 工 作 于 定时方式2(自动重装在时间常数),定时时 间常数为20us,高优先级中断。
(2)定时器T0的中断服务函数为每20us (1/4位时间)到,T20_c计数器加1。
(3)外部中断1的中断服务函数的算法: ①关闭外部中断,启动T0定时器,清计 数器T20_c。 ②判断第一位起始位是否为1,并丢掉该 位,清计数器T20_c,清接收数据位计数器。 ③接收后面的13位数据的每一位,每 一位的时间1.668ms ④停止定时器,接收的13位数据取反送I RDA_dat,从IRDA_dat中提取5位用户码。 ⑤当第二个起始位为1且用户码为0000 0,表明本帧数据有效,提取6位指令码,否 则行纠错处理。 ⑥等待外部中断1(IRDA)变高,打开外 部中断1。
基于MCS51单片机的红外线解码系统设计

JNC TT
;如果为0就跳转到TT
MOV R4,#2
;延时1000微秒
Hale Waihona Puke D6:MOV R5,#248
DJNZ R5,$
DJNZ R4,D6
;检测到高电平1的话延时1毫秒等
待脉冲高电平结束
TT:
MOV A,@R1 ;将R1中地址的给A
RRC A
;将C中的值0或1移入A中的最低位
MOV @R1,A ;
DJNZ R3,SS ;接收满8位换一个内存
低成本、高可靠性、体积小、结构简单、避免人身伤害等优
点,是一种先进的控制方式,具有广阔的应用前景。
一、单片机解码程序设计
单片机在进行解码时,首先根据SM0038所传输过来的信号
判断是否有红外信号,若检测红外信号,则单片机产生中断,
进入中断处理程序,对红外线信号进行解码,单片机程序使用
汇编设计,采用查询方式确定是否有红外线信号,其解码查询
基于MCS51单片机的红外线解码系统设计
李春燕
(重庆市铜梁职业教育中心)
摘 要:本文通过对通用红外线遥控器编码系统的研究,
利用MCS51系列单片机对红外线进行解码,实现了红外线解码系
统,并利用单片机的串行通信接口与通用计算机进行通信,实
现了计算机上位机显示软件的设计。
关键词:MCS-C51 红外线 解码 串行通信
INC R1
;对R1中的值加1,换下一个RAM
DJNZ R2,PP ;接收完所有数据
EXIT:
#pragma endasm
上位机程序设计
上位程序使用微软基于.NET的新一代程序设计语言C#(读
作C SHARP),该语言是一种安全的语言,具有内存自动回收功
基于M37544单片机的红外遥控解码方案设计
—科教导刊(电子版)·2018年第26期/9月(中)—264基于M37544单片机的红外遥控解码方案设计裴德凤(合肥通用机械研究院安徽·合肥230031)摘要根据HS0038的性能,结合瑞萨M37544单片机,本文介绍红外遥控系统的工作原理及空调器红外遥控通讯协议,给出红外遥控接收系统的硬件电路,重点阐述通过查询方式完成程序编写的方法,该种控制方式具有可靠性高、成本低的特点,在单片机控制系统中可以广泛的应用。
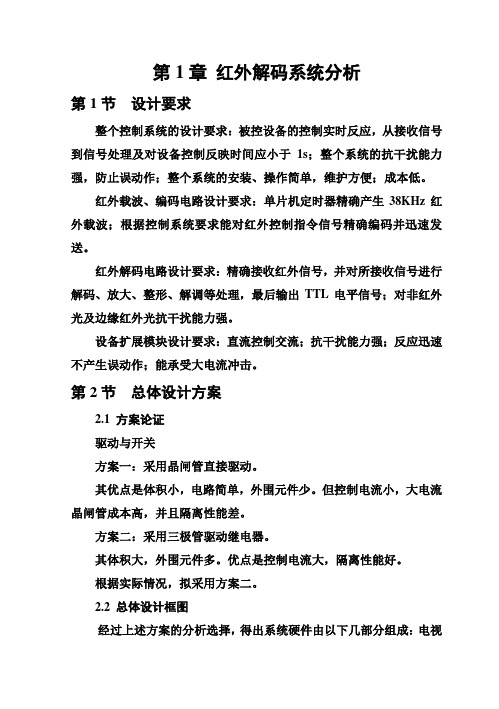
关键词单片机红外遥控空调查询方式中图分类号:TP368.1文献标识码:A 0引言红外遥控是目前使用很广泛的一种通信和遥控技术,由于红外遥控装置具有体积小,功耗低,功能强、成本低等特点,因而,在家用电器产品及工业设备中得到广泛采用,本文以家用空调为例,阐述如何通过M37544单片机来实现遥控器解码功能。
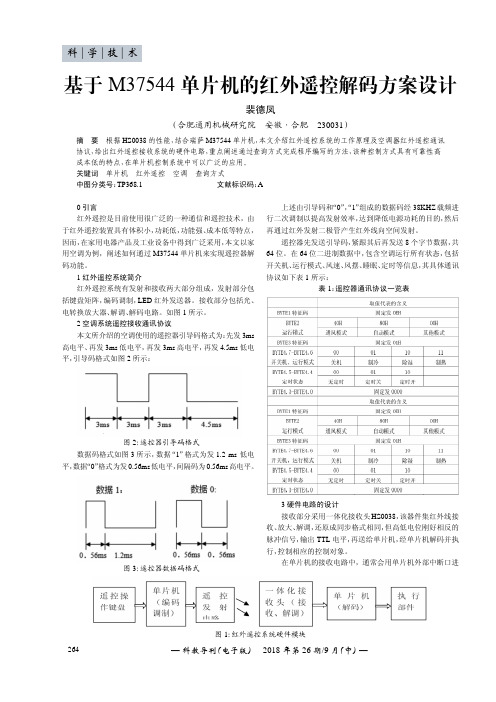
1红外遥控系统简介红外遥控系统有发射和接收两大部分组成,发射部分包括键盘矩阵,编码调制,LED 红外发送器。
接收部分包括光、电转换放大器、解调、解码电路。
如图1所示。
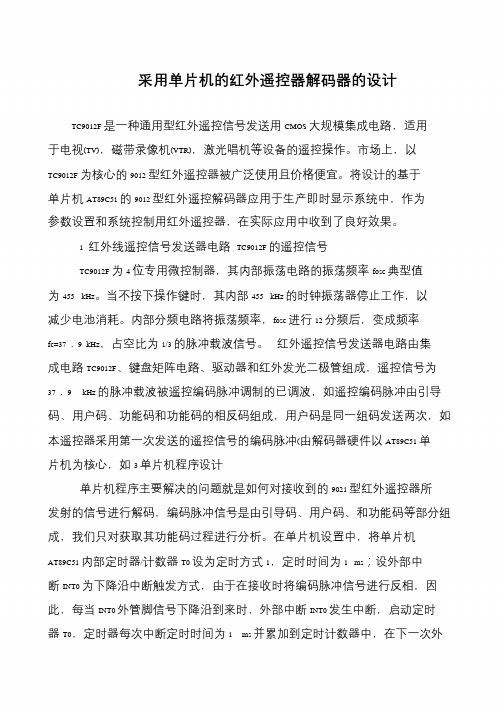
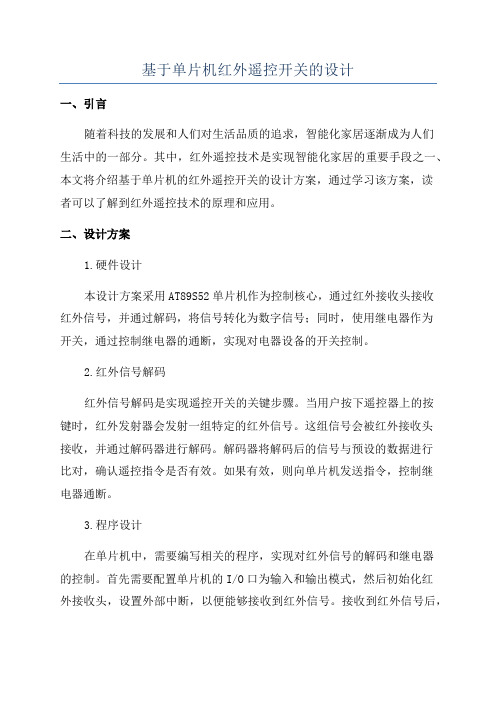
2空调系统遥控接收通讯协议本文所介绍的空调使用的遥控器引导码格式为:先发3ms 高电平、再发3ms 低电平,再发3ms 高电平,再发4.5ms 低电平,引导码格式如图2所示:图2:遥控器引导码格式数据码格式如图3所示,数据“1”格式为发1.2ms 低电平,数据“0”格式为发0.56ms 低电平,间隔码为0.56ms高电平。
图3:遥控器数据码格式上述由引导码和“0”,“1”组成的数据码经38KHZ 载频进行二次调制以提高发射效率,达到降低电源功耗的目的,然后再通过红外发射二极管产生红外线向空间发射。
遥控器先发送引导码,紧跟其后再发送8个字节数据,共64位。
在64位二进制数据中,包含空调运行所有状态,包括开关机、运行模式、风速、风摆、睡眠、定时等信息,其具体通讯协议如下表1所示:表1:遥控器通讯协议一览表3硬件电路的设计接收部分采用一体化接收头HS0038,该器件集红外线接收、放大、解调,还原成同步格式相同,但高低电位刚好相反的脉冲信号,输出TTL 电平,再送给单片机,经单片机解码并执行,控制相应的控制对象。
采用单片机的红外遥控器解码器的设计
采用单片机的红外遥控器解码器的设计TC9012F 是一种通用型红外遥控信号发送用CMOS 大规模集成电路,适用于电视(TV),磁带录像机(VTR),激光唱机等设备的遥控操作。
市场上,以TC9012F 为核心的9012 型红外遥控器被广泛使用且价格便宜。
将设计的基于单片机AT89C51 的9012 型红外遥控解码器应用于生产即时显示系统中,作为参数设置和系统控制用红外遥控器,在实际应用中收到了良好效果。
1 红外线遥控信号发送器电路TC9012F 的遥控信号TC9012F 为4 位专用微控制器,其内部振荡电路的振荡频率fosc 典型值为455 kHz。
当不按下操作键时,其内部455 kHz 的时钟振荡器停止工作,以减少电池消耗。
内部分频电路将振荡频率,fosc 进行12 分频后,变成频率fc=37.9 kHz,占空比为1/3 的脉冲载波信号。
红外遥控信号发送器电路由集成电路TC9012F、键盘矩阵电路、驱动器和红外发光二极管组成,遥控信号为37.9 kHz 的脉冲载波被遥控编码脉冲调制的已调波,如遥控编码脉冲由引导码、用户码、功能码和功能码的相反码组成,用户码是同一组码发送两次,如本遥控器采用第一次发送的遥控信号的编码脉冲(由解码器硬件以AT89C51 单片机为核心,如3 单片机程序设计单片机程序主要解决的问题就是如何对接收到的9021 型红外遥控器所发射的信号进行解码,编码脉冲信号是由引导码、用户码、和功能码等部分组成,我们只对获取其功能码过程进行分析。
在单片机设置中,将单片机AT89C51 内部定时器/计数器T0 设为定时方式1,定时时间为1 ms;设外部中断INT0 为下降沿中断触发方式,由于在接收时将编码脉冲信号进行反相,因此,每当INT0 外管脚信号下降沿到来时,外部中断INT0 发生中断,启动定时器T0,定时器每次中断定时时间为1 ms 并累加到定时计数器中,在下一次外。
基于单片机红外遥控开关的设计
基于单片机红外遥控开关的设计一、引言随着科技的发展和人们对生活品质的追求,智能化家居逐渐成为人们生活中的一部分。
其中,红外遥控技术是实现智能化家居的重要手段之一、本文将介绍基于单片机的红外遥控开关的设计方案,通过学习该方案,读者可以了解到红外遥控技术的原理和应用。
二、设计方案1.硬件设计本设计方案采用AT89S52单片机作为控制核心,通过红外接收头接收红外信号,并通过解码,将信号转化为数字信号;同时,使用继电器作为开关,通过控制继电器的通断,实现对电器设备的开关控制。
2.红外信号解码红外信号解码是实现遥控开关的关键步骤。
当用户按下遥控器上的按键时,红外发射器会发射一组特定的红外信号。
这组信号会被红外接收头接收,并通过解码器进行解码。
解码器将解码后的信号与预设的数据进行比对,确认遥控指令是否有效。
如果有效,则向单片机发送指令,控制继电器通断。
3.程序设计在单片机中,需要编写相关的程序,实现对红外信号的解码和继电器的控制。
首先需要配置单片机的I/O口为输入和输出模式,然后初始化红外接收头,设置外部中断,以便能够接收到红外信号。
接收到红外信号后,将解码后的数据与预设的数据进行比对,如果相同,则通过单片机的输出口控制继电器的通断,实现开关控制。
三、实验结果通过实验验证,基于单片机红外遥控开关的设计方案可以正常工作。
用户可以通过按下遥控器上的按键,控制继电器的通断,从而实现对电器设备的开关控制。
四、应用展望基于单片机红外遥控开关的设计方案可以广泛应用于智能化家居中,通过设置不同的红外编码,可以实现对不同设备的开关控制。
例如,通过不同编码实现对灯光、电视、空调等设备的开关控制。
此外,还可以通过增加传感器模块,实现对环境的监测和控制。
比如,根据温度传感器的数据,自动控制空调的开关,实现智能化温度控制。
总结:基于单片机红外遥控开关的设计方案利用了红外遥控技术和单片机控制技术,实现了对电器设备的智能化控制。
通过学习该方案,读者可以了解到红外遥控技术的原理和应用,以及单片机的应用。
(完整版)基于51单片机的红外遥控器解码设计毕业论文
第1章红外解码系统分析第1节设计要求整个控制系统的设计要求:被控设备的控制实时反应,从接收信号到信号处理及对设备控制反映时间应小于1s;整个系统的抗干扰能力强,防止误动作;整个系统的安装、操作简单,维护方便;成本低。
红外载波、编码电路设计要求:单片机定时器精确产生38KHz红外载波;根据控制系统要求能对红外控制指令信号精确编码并迅速发送。
红外解码电路设计要求:精确接收红外信号,并对所接收信号进行解码、放大、整形、解调等处理,最后输出TTL电平信号;对非红外光及边缘红外光抗干扰能力强。
设备扩展模块设计要求:直流控制交流;抗干扰能力强;反应迅速不产生误动作;能承受大电流冲击。
第2节总体设计方案2.1 方案论证驱动与开关方案一:采用晶闸管直接驱动。
其优点是体积小,电路简单,外围元件少。
但控制电流小,大电流晶闸管成本高,并且隔离性能差。
方案二:采用三极管驱动继电器。
其体积大,外围元件多。
优点是控制电流大,隔离性能好。
根据实际情况,拟采用方案二。
2.2 总体设计框图经过上述方案的分析选择,得出系统硬件由以下几部分组成:电视红外遥控器,51单片机最小系统,接收放大于一体集成红外接收头,1602液晶显示驱动电路。
整体设计思路为:根据扫描到不同的按键值转至相对应的ROM表读取数据。
确认设备及菜单选择键后AT89S2将从ROM读取出来的值,按照数据处理要求从P2.5输出控制脉冲与T0产生的38KHz的载波(周期是26.3μs)进行调制,经NPN三极管对信号放大驱动红外发光管将控制信号发送出去。
红外数据接收则是采用HS0038一体化红外接收头,内部集成红外接收、数据采集、解码的功能,只要在接收端INT0检测头信号低电平的到来,就可完成对整个串行的信号进行分析得出当前控制指令的功能。
然后根据所得的指令去操作相应的用电器件工作,如图1-1所示。
图1-1 电路设计整体框图第2章红外解码硬件电路设计第1节单片机及其硬件电路设计1.1 单片机的介绍AT89S52是一种低功耗、高性能CMOS8位微控制器,具有8K 在系统可编程Flash 存储器。
基于STC89C52红外遥控系统设计
基于STC89C52红外遥控系统设计引言:随着科技的发展,遥控系统在现代生活中变得越来越普遍,特别是在家庭电器和自动化控制领域。
本文旨在设计一个基于STC89C52单片机的红外遥控系统,通过LCD显示器显示遥控指令的传输和接收过程,以及相应的操作结果。
设计思路:该遥控系统主要由红外传感器、STC89C52单片机、LCD显示器和电源部分组成。
红外传感器负责接收红外遥控信号,将其转换为电信号,传递给STC89C52单片机进行解码处理。
STC89C52单片机通过解码获得红外遥控指令,并将其转换为相应的操作。
同时,STC89C52单片机会将操作结果通过LCD显示器显示出来。
电路设计:在电路设计方面,主要需要连接红外传感器、STC89C52单片机和LCD 显示器。
首先,将红外传感器的输出引脚连接到STC89C52单片机的一个可编程引脚上,以便传递红外信号。
然后,将STC89C52单片机的其他引脚连接到LCD显示器的对应引脚上,以便进行数据和控制信号的传输。
最后,将适量的电源接入整个系统,以提供必要的电力。
程序设计:在程序设计方面,首先需要根据红外传感器的工作原理对接收到的红外遥控信号进行解码。
可以采用红外遥控解码库进行解码,以便获得具体的遥控指令。
然后,根据解码获得的遥控指令,编写相应的操作函数,在LCD显示器上显示出操作结果。
测试和优化:在完成电路和程序设计后,需要进行测试和优化,以确保系统的正常工作。
可以使用遥控器发送不同的指令,观察系统的响应情况,并在LCD 显示器上进行验证。
如果出现问题,可以通过调试程序和电路进行优化,直到系统能够正常工作。
总结:通过以上设计,可以实现基于STC89C52的红外遥控系统,并通过LCD显示器显示遥控指令的传输和接收过程,以及相应的操作结果。
该系统可以广泛应用于家庭电器和自动化控制领域,提高生活便利性和自动化水平。
同时,该设计也为学习和研究红外遥控技术提供了一个实践平台。
基于单片机的红外编码分析仪的软件设计与测试
生产 环境下所必 须具备的 。而 这种不具 备良好交互性 的检测 3 . 1 c h 4 5 1 接 口和参 数定义 : 设 备是红外遥 控器 生产厂 家提 高检测效率 的瓶颈 。 为此 , 我们
有必 要研 究一种兼容 性好 , 使 用方便 的红外编码 分析 检测设 s b i t c h 4 5 1 ̄a d = P 2 ^ 4 ; / / 数据加载 引脚 s b i t c h 4 5 1 d i n = P 2 ^ 5 ; / / 数据输入 引脚 s b i t c h 4 5 1 c l k = P 2 ^ 6 ; / / 时钟 引脚 s b i t c h 4 5 1 d o u t = P 3 ^ 2 ; / / 数据输输 出引脚
负责完成 用户命令 的输 入。 控 器生产厂 家在对红外遥 控器 进行检测 时使 用 的设备大都 以 口 , 发光 二极管为核 心部件 。 发 光二极管为通 用部件 , 不能对不 同 2 . 1 软件 系统 的组 成 。软件 系统 由系统控制 模块 、 红外 遥控 红 外遥控信 号发 射模块 、 红外遥 控信号 分析模 种 类得遥控器进 行区分 , 这使 得红外遥 控器检测 工作得效率 信号接 收模 块 、 大大 降低 。 为 了提高红外遥控 器的检测效 率 , 要求 用于检测红 块和红外遥 控信 号存储模 块五个模块组 成 。 外遥 控器 的设 备必须具备 良好 的人机交 互界面 ,这是现代化 3 主要参数 及函数定义
检测
各模块 功能简要描述 如下 : 红外编 码接收模 块 : 负责接 收
迅 猛发展 的红 外遥控技术 已经普及 到了我们平 常生活 的 目标红 外遥控器 的发 射出来的红外信 号 ;红 外编码分 析处理 是真个 系统的核心模 块 , 负责对收到 的红外编 码进行 分 每个 角落 , 并给 国民经济得发展 带来了一定得 空间 。 例如红 外 模块 : 技术 在通信 、 产过程 控制 、 工业 自动化生 、 信息 采集和处理 、 安 析处理 , 转换 为以时间格式 显示的编 码信 息 , 并 通过 按键控 制 全 防范 、 家用 电器控 制等各个方面 已经得到 了广泛的应用 。 尤 模块协 调用户对各模 块的控制 ( 例如 控制 完成红外 编码 的显 其 在家用 电器控制 领域, 红 外技术 的使 用给广 大用 户带来 了 示 、 存储 、 发射 ) 。
基于单片机的红外遥控解码滤波模块设计
基于单片机的红外遥控解码滤波模块设计李勇;郭清华【期刊名称】《计算机光盘软件与应用》【年(卷),期】2011(000)012【摘要】本文以单片机为控制核心,利用相应的硬件滤波功能和软件滤波算法对红外遥控接收头的输出信号进行实时地动态处理,解析出真实的控制信号并输入到与BL9149相兼容的输出管脚。
本红外遥控解码模块即滤除了干扰信号,提高了抗外界干扰光源的性能;同时实时操控性能达到了要求。
%In this paper, for the control of the microcontroller core,using the appropriate hardware and software filtering algorithm to filter the infrared remote control receiver output signal in real-time dynamic processing,parsing out the actual control signals and input to output is compatible with BL9149 pin.The infrared remote control decoding module that filter out the interference signal,to improve the performance against outside interference sources;while real-time control performance to requirements.【总页数】2页(P167-168)【作者】李勇;郭清华【作者单位】中国煤炭科工集团重庆研究院,重庆400039;中国煤炭科工集团重庆研究院,重庆400039【正文语种】中文【中图分类】TP368.1【相关文献】1.基于单片机的红外遥控器解码器的设计 [J], 李泽光2.基于单片机的UHF RFID读写器基带编解码模块的设计 [J], 刘军君;刘陈3.基于M37544单片机的红外遥控解码方案设计 [J], 裴德凤4.基于单片机的红外遥控解码电路的设计 [J], 朱高中5.基于单片机的红外遥控器解码器设计 [J], 靳光明因版权原因,仅展示原文概要,查看原文内容请购买。
基于单片机的红外遥控解码电路的设计

基于单片机的红外遥控解码电路的设计朱高中【期刊名称】《计算技术与自动化》【年(卷),期】2011(030)002【摘要】The launching and receiving infrared remote control theory, given the remote control signal recognition and decoding. This design mainly through AT89C51 MCU decoding infrared remote control, the decoder hardware and appropriate sofeware are analysed and the program process diagrams are given. Adopting infrared remote control not only totally reliable and can effectively isolated electrical disturbance. So on the remote control system adopts single-chip microcomputer application design, remote control device will also have programming flexibility, control range, small volume, low power consumption, the function is strong, low cost, high reliability, characteristics, so the one-chip computer infrared remote control technology has broad prospects for development.%介绍红外遥控的发射与接收原理,给出遥控信号的识别与解码方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
开放实验报告课题名称基于单片机的红外解码器的设计学生姓名系、年级专业信息工程系、11、12级电子信息工程指导教师江世明2014年 5 月20日基于单片机的红外解码器的设计一.实验目的1、了解红外编码原理,模拟红外发射信号;2、用程序实现红外编码的解码;二.实验内容设计基于单片机的红外解码器,实现红外遥控信号智能解码,要求制作出实物,实现解码功能。
三.电路设计1、红外编码原理在实际应用中红外编码将二进制码调制到38MHz的载波频率上,通过在空中传播,由红外接收头接收之后,由内部的解调电路进行解调, 解调出来的就是我们发送的那些二进制码。
红外编码方式根据日本NEC 协议编码。
每次发送四个字节:用户码,用户反码,数据码,数据反码。
数据 0和 1的区别通常体现在高低电平的时间长短上。
一次按键首先发送9ms的低电平和4.5ms的高电平的引导码。
实际生活中,用遥控器发出的信号与上面的信号是相反的,经过红外线接收头解码以后就和上图一样了,值得大家注意的是发射模块的芯片不同,引导区的时间和数据都有所不同,但解决的方法都是一样的。
引导码后就是用户码。
但是怎么来区分0和1呢?前面我们提到了PWM(脉宽调制)。
根据脉冲的宽度来区别0和1.0.56ms低电平之后接0.56ms高电平为0,接1.12ms高电平为1.2、红外解码方法在实际生活中红外解码一般由红外接收头接收并解码。
解码时先跳过9ms 高电平和4.5ms的低电平,然后跳过0.56ms的低电平,最后通过循环等待搞电平的结束并计时。
通过判断高电平时间的长短来区分0(0.56ms)和1(1.12ms)。
最后判断接收到的四个字节(用户码,用户反码,数据码,数据反码)中数据码和取反后的数据反码相不相等。
3、红外编解码电路四、程序设计见附录五、系统仿真仿真分析:仿真照片如上图,当从4*4键盘按下K5时,单片机U1的数码管显示5,同时P3.0发送出如下图所示的脉冲。
上图包含了9ms高电平和4.5ms低电平的引导码和4字节(32位)的信息码,包括用户码(00000000),用户反码(11111111),数据码(00001001),数据反码(11110110)。
六、结论通过本次试验用软件模拟了红外发送编码与接收解码的过程。
基本上可以脱离硬件实现红外的发送与接收。
但是本实验还是存在一些问题,发送信号没有用38Khz的载波频率载波和实际的发送信号应该与本实验相反。
所以做实物时应该考虑这些问题。
附录:发送程序:#include<reg51.h>#define uchar unsigned char#define uint unsigned intuchar IR[4]; //全局变量存放发送数据sbit IRIN=P3^4;// 发送脚sbit BEEP = P3^0;// 蜂鸣器void SendData();void Delay(uint x);void Delay_112();void Delay_56();void Delay_50();void Key_scan();void Beep();uchar DM[] ={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1 ,0x86,0x8e,0xff};void main(){uchar t=16;IR[2]=16;while(1){Key_scan();P0 = DM[IR[2]];if(t!=IR[2]) //保证每次只发送一个数据缺点:每个键不能重复发送{t=IR[2]; //保护IR[2]的值Beep();SendData();IR[2]=t; //还原IR[2]的值}Delay(100);}}void SendData(){uchar k,i,t;IR[1]=~IR[0]; //用户码取反IR[3]=~IR[2]; //数据码取反IRIN=0;Delay(9); //假设9ms低电平发射IRIN=1;Delay(4); //4.5ms高电平Delay_50();for(k=0;k<4;k++)for(i=0;i<8;i++){IRIN=0;Delay_56();t=IR[k]; //保存IR[k]的值if(IR[k]>>=7) //取最高位{IRIN=1;Delay_112();}else{IRIN=1;Delay_56();}t<<=1; //次高位变为最高位IR[k]=t;}IRIN=0;//保证最后一个脉冲的高电平时间Delay_56();IRIN=1;}void Key_scan(){uchar i;P1=0x0f;if(P1!=0X0f){Delay(2); //消抖if(P1!=0x0f)switch(P1){case 0x0e: i=0;break;case 0x0d: i=1;break;case 0x0b: i=2;break;case 0x07: i=3;}Delay(1);P1=0xf0;switch(P1){case 0xe0: i+=0;break;case 0xd0: i+=4;break;case 0xb0: i+=8;break;case 0x70: i+=12;}IR[0]=0; //用户码为0IR[2]=i;}}void Beep(){uchar i,j;for(i=0;i<100;i++){for(j=0;j<123;j++);BEEP=~BEEP;}BEEP=1;}void Delay(uint x){uint i,s;for(i=x;i>0;i--)for(s=127;s>0;s--);}void Delay_112(){uint m,n;for(m=1;m>0;m--)for(n=142;n>0;n--);}void Delay_56(){uint m,n;for(m=1;m>0;m--)for(n=68;n>0;n--);}void Delay_50(){uint m,n;for(m=1;m>0;m--)for(n=64;n>0;n--);}接收程序:#include <reg51.h>#define uchar unsigned char#define uint unsigned int#define SMG P0sbit IRIN=P2^7; //红外线输入sbit TS=P1^0; //显示灯void Delay(uint x);void Delay_50();void ReadIR();uchar IR[4];uchar DM[] ={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1 ,0x86,0x8e,0xff};void main(){IR[2]=16;//关显示while(1){ReadIR();Delay(10);if(IR[2]>=16) //接收到的值大于等于16关显示SMG=DM[16];elseSMG=DM[IR[2]];} }void ReadIR(){uchar i,j,time;if(IRIN==0){while(IRIN==0); //等待9ms的引导码过去if(IRIN==1){while(IRIN==1); //等待4.5ms的引导码过去IR[2]=0; //重新给数据码清零for(i=0;i<4;i++){for(j=0;j<8;j++){while(IRIN==0); //等待560us的低电平过去while(IRIN==1){time++; //计时Delay_50();}IR[i]<<=1; //因为有8次循环为了保证最后一次为个位if(time>=6){IR[i]|=0x01;}time=0; //计时清零}}TS=0; //灯闪烁提示Delay(200);TS=1;}}}void Delay(uint x){uint i,s;for(i=x;i>0;i--)for(s=127;s>0;s--);}void Delay_50(){uint m,n;for(m=1;m>0;m--)for(n=20;n>0;n--);}。