-计划评审技术与关键路线法
运筹学基础-网络计划1
答案
作业名称 A 紧前作业 无
B 无
C 无
D A
E B
F B、C
A
1
5
D F E
11
C
B
7 3
答案
作业名称 A 紧前作业 无
B 无
C A、B
D B
E C
F D
A
1
5
C
7
E
11
B
3
D
9
F
第二节 网络时间的计算
网络时间的计算有三种计算方法:图上计算法、表格计 算法和EXCEL计算法。
一、图上计算法
网络图中只能有一个始点和一个终点,使得自网络图的始点 经由任何路径都可以到达终点。
编号的规定
编号应从始事件开始,按照时序依次从小到大对事件编号,直到终 事件。 编号时不允许箭头编号小于箭尾编号。 事件的编号原则 箭尾事件(i)小于箭头事件(j);一般采用非连续编号,即可空留 出几个号,跳着编,将来有变化时,不致打乱全局。
2. 画网络图(以前图为例)
作业 A B C D E F G H I J 紧接的前项作业 作业时间(周) 2 无 3 无 A,B 4 B 1 A 5 C 3 E,F 2 D,F 7 G,H 6 I 5
第一步:先画出无紧前作业的A、B,给网络始点编号为① 第二步:用一条斜线“\”消去已画入网络图的作业A、B,
尽量避免箭线之间的交叉
为了方便计算和美观清晰,PERT网络图中通过调整布 局,尽量避免箭线之间的交叉。
2 8 2 4 6
7 10
1
9
11
1
5
6
9
11
3
5
7 10 3 4 8
计划评审方法和关键路线法

第七章 计划评审法和关键路线法 一、选择1. 在PERT 网络图中,各项作业累计时间最长的那条路,称为(A )A 关键路线B 作业C 事件D 工序 2.计算作业最早开始时间的公式为(B )A ),(),(),(j i t j i j i t t EF ES +=B {}),(max ),(i k j i t t EF kES =C )},({min ),(k j j i t t LS kES = D ),(),(),(j i t j i j i t t LF ES -=3.计算作业的最早结束时间的公式为(A )A ),(),(),(j i t j i j i t t ES EF +=B {}),(max ),(i k j i t t ES kEF =C )},({min ),(k j j i t t LS kEF = D ),(),(),(j i t j i j i t t LF EF -=4.计算作业的最迟结束时间的公式为( C )A ),(),(),(j i t j i j i t t ES lF +=B {}),(max ),(i k j i t t ES kLF =C )},({min ),(k j j i t t LS kLF = D ),(),(),(j i t j i j i t t LF LF -=5.计算作业的最迟开始时间的公式为(D )A ),(),(),(j i t j i j i t t ES LS +=B {}),(max ),(i k j i t t ES kLS =C )},({min ),(k j j i t t LS kLS = D ),(),(),(j i t j i j i t t LF LS -=6.作业的自由时差的公式为(A )A ),(),(),(),(j i t j i j i j i R t t ES LF --=B {}),(max ),(i k j i R t ES k=C )},({min ),(k j j i R t LS k= D ),(),(),(j i t j i j i R t LF -=7. 作业的自由时差的公式为(D )A ),(),(),(j i j i j i R t t ES LF -=B {}),(max ),(i k j i R t ES k=C )},({min ),(k j j i R t LS k= D ),(),(),(j i j i j i R t t EF LF -=8. 作业的自由时差的公式为(D )A ),(),(),(j i j i j i R t t ES LF -=B {}),(max ),(i k j i R t ES k=C )},({min ),(k j j i R t LS k= D ),(),(),(j i j i j i R t t ES LS -=9.自由时差的公式为( C )A ),(),(),(j i j i j i F t t ES LF -=B {}),(max ),(i k j i F t ES k=C ),(),()},({min ),(j i t j i k j j i F t t ES ES j--= D ),(),(),(j i j i j i F t t ES LS -=10. 自由时差的公式为( C )A ),(),(),(j i j i j i F t t ES LF -=B {}),(max ),(i k j i F t ES k=C ),()},({min ),(j i k j j i F t t EF ES j-= D ),(),(),(j i j i j i F t t ES LS -=11. 若用ES i 表示结点i 的最早开始时间,ES j 表示结点j 的最早开始时间,T i ,j 表示活动i→j 的作业时间,LF i 表示结点i 的最迟完成时间,LF j 表示结点j 的最迟完成时间,则下述公式中正确的是(A ) A.ES j =}{max ,i j i i jT ES +<B.ES j =}{min ,i j i i jT ES +<C.LF j =}{max ,i j i i jT LF -<D.LF j =}{min ,i j i i jT LF +<12.在实际计算中,完成一项作业的期望时间),(j i Et 是按(B )经验公式计算的。
第5章-计划评审技术

对关键线路(1-3-4-7-8):
任务的期望工期(Te): Te=11.5+10.5+16+16=54(天);
任务的期望工期的方差: =4.7+3.4+4+4=16.1(天2 )。 该任务的期望工期:Te=54(天); 任务的期望工期的方差: 16.1(天*天 ),均方差:4(天)。
第二十三页,编辑于星期一:十四点 十二分。
同样,反过来根据概率求相应的指令 工期:D=Z× +Te
如上例中,若要求该项任务的完成有 75%的把握,问计划完成的工期限制应 定为多少天?
先查正态概率分布表,75%的Z值为 0.67,于是D=0.67×4+54=57天, 即要有75%的把握完成该任务,期限 不应少于57天。
第二十一页,编辑于星期一:十四点 十二分。
p( ) p( ) p( ) p( )
-0.0 0.50 -1.4 0.08 0.0 0.50 1.4 0.92
-0.1 0.46 -1.5 0.07 0.1 0.54 1.5 0.93
-0.2 0.42 -1.6 0.05 0.2 0.58 1.6 0.95
(6-8)
4
12
14
11
2.8
(7-8)
8
17
20
16
4
第十七页,编辑于星期一:十四点 十二分。
解:有二条关键线路:(1-2-4-7-8)
(1-3-4-7-8)。 对关键线路(1-2-4-7-8):
任务的期望工期(Te): Te=10.5+11.5+16+16=54(天); 任务的期望工期的方差: =1.4+2.3+4+4=11.7(天*天)。
第七章 计划评审方法和关键路线法

and Review Technique)简称为PERT。鉴于这两种方法的差别,
所以,CPM主要应用于以往在类似工程中已取得一定经验的承包工程; PERT更多地应用于研究与开发项目。
2013-1-8 3
引言
在这两种方法得到应用推广之后,又陆续出现了类似的最低成
本估算计划法、产品分析控制法、人员分配法、物资分配和多种项
要的时间,以及各项工作的相互关系,通过网络分析研究工程费用与
工期的相互关系,并找出在编制计划时及计划执行过程中的关键路线。 这种方法称为关键路线法(Critical Path Method)简称CPM。 1958年,美国海军武器部,在制定研制“北极星”导弹计划时, 同样地应用了网络分析方法与网络计划。但它注重于对各项工作安排 的评价和审查。这种计划称为计划评审方法(Program Evaluation
甘特图(横道图) –20世纪初,H.L.甘特创造了“ 甘特法”; –将各项工作任务按其起迄时刻用一条粗线表示在有时间坐 标的图表上; –横道图能清楚地表明各项任务的进度安排,对提高管理水 平作用明显。 –横道图法的缺点:不能显示各工作之间的内在联系和逻辑 关系;不能清晰地显示影响整个工程的关键因素。
一般如果起点事件为i,终点事件 为j,将该作业记为(i,j)。
2013-1-8
作业a: (1,2)
10
§1 PERT网络图
3.路线:起点事件(图的最初事件)与终点事件(最终事件)
之间由各项作业连贯组成的一条路。 关键路线:各弧权重总和最大的路线,或称主要矛盾路线, 它决定网络图上所有作业需要的最短时间。 4.网络图:由工序、事项及时间参数所构成的有向图即为网 络图。
2、工序最早结束时间tEF(i,j)
运筹学计划评审与关键线路
1
2
A(9)
3
4
5
6
7
8
9
10
11
B(3) 1
2
E(8)
C(6) 3 F(7) 4 G(2) 5 H(1) 6
D(4)
22
24
10
2
1
6-2 时间参数与关键线路
一,网络图的时间参数计算
1,工作最早开始时间(ES) ES i j = max{ES k i + t k i } 2,工作最迟开始时间(LS) LS i j = min LS j k t i j 3,工作最早完成时间(EF) EFi j = ES i j + t i j 4,工作最迟完成时间(LF) LFi j = LS i j + t i j
F 5 A 5 B 1 2 C 3 D 2 E 6
5
H
3 G 5
1
3
4
6
T=16
例1:求时间参数
19 2 88 12 11
3C
A
1
D 2
1111 4 0 0
H
5
ES LS TF FF
01 10
1
E
55
6
1113 2 0
0G
工序 G H I K L M
E
紧前工序 工序时间 2 B,C ----5 2 A,L 1 F,I 7 B,C C 3
M 3 B 4 G 4 2 L 7 6 5 A 3
5
F 7 8 9 I 5 D 3 5 10
K 1
11
1 2 3 4 5 6 7 8 9 1 1 1 1 1 1 1 1 1 1 2 0 1 2 3 4 5 6 7 8 9 0
三点估算(PERT)、关键路径(CPM)、蒙特卡洛(软考计算题)
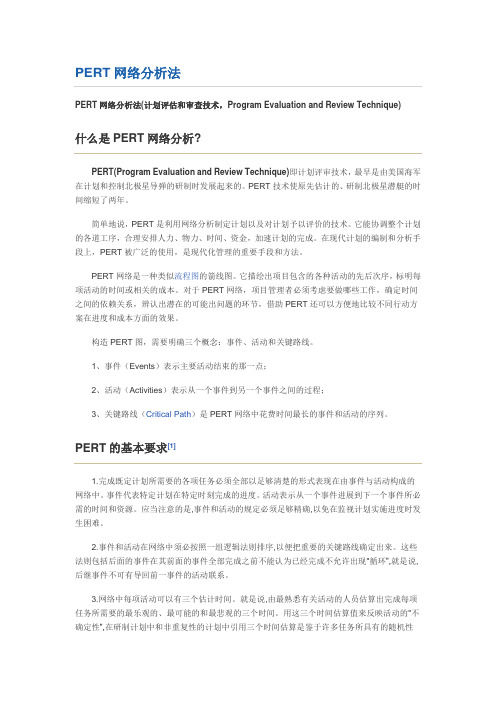
PERT网络分析法PERT网络分析法(计划评估和审查技术,Program Evaluation and Review Technique)什么是PERT网络分析?PERT(Program Evaluation and Review Technique)即计划评审技术,最早是由美国海军在计划和控制北极星导弹的研制时发展起来的。
PERT技术使原先估计的、研制北极星潜艇的时间缩短了两年。
简单地说,PERT是利用网络分析制定计划以及对计划予以评价的技术。
它能协调整个计划的各道工序,合理安排人力、物力、时间、资金,加速计划的完成。
在现代计划的编制和分析手段上,PERT被广泛的使用,是现代化管理的重要手段和方法。
PERT网络是一种类似流程图的箭线图。
它描绘出项目包含的各种活动的先后次序,标明每项活动的时间或相关的成本。
对于PERT网络,项目管理者必须考虑要做哪些工作,确定时间之间的依赖关系,辨认出潜在的可能出问题的环节,借助PERT还可以方便地比较不同行动方案在进度和成本方面的效果。
构造PERT图,需要明确三个概念:事件、活动和关键路线。
1、事件(Events)表示主要活动结束的那一点;2、活动(Activities)表示从一个事件到另一个事件之间的过程;3、关键路线(Critical Path)是PERT网络中花费时间最长的事件和活动的序列。
PERT的基本要求[1]1.完成既定计划所需要的各项任务必须全部以足够清楚的形式表现在由事件与活动构成的网络中。
事件代表特定计划在特定时刻完成的进度。
活动表示从一个事件进展到下一个事件所必需的时间和资源。
应当注意的是,事件和活动的规定必须足够精确,以免在监视计划实施进度时发生困难。
2.事件和活动在网络中须必按照一组逻辑法则排序,以便把重要的关键路线确定出来。
这些法则包括后面的事件在其前面的事件全部完成之前不能认为已经完成不允许出现“循环”,就是说,后继事件不可有导回前一事件的活动联系。
07计划评审方法和关键路线法讲解

2019/4/30
42
1
1
2019/4/30
2
A
E
D
B
4
C
F
3
A C B
2
D
3
F
4
G
5
E
5
G 43
五、绘制 PERT 网络图
绘制网络图的学习方法: 亲自画几个,从易到难,画几个之后,
就会知道其中的规律。
2019/4/30
44
例1:
工序 A B C D E F
G
HI
紧前工序 -- -- A B B C、D C、D E、F G
以纵轴展示计划项目,横轴展示时间刻度。
2019/4/30
5
2019/4/30
6
2019/4/30
7
2019/4/30
8
2019/4/30
9
甘特图(横道图)
横道图法的缺点:不能显示各工作之间的内在联 系和逻辑关系;不能清晰地显示影响整个工程的 关键因素。
2019/4/30
10
本章又叫网络计划技术:又称统筹法
2
1
3
1
2
2019/4/30
23
即一个工序用确定的两个相关事项表示,某两个相邻结点只 能是一个工序的相关事项。在计算机上计算各个结点和各个 工序的时间参数时,相关事项的两个结点只能表示一道工序, 否则将造成逻辑上的混乱。
如图1的画法是错误的,图2的画法是正确的。
a
c
1
2
3
a
c
1
3
4
b
图1
2019/4/30
完工,用一个始点、一个终点表示。若这些工序不能用一个
运筹学课件第8章计划评审技术与关键路线法
介绍计划评审的方法和技巧,确保评审的有效 性。
关键路线法
1
关键路线法简介
介绍关键路线法的概念和作用,用于优
关键路线法的原理和流程
2
化项目的关键路径。
解释关键路线法的原理和详细的应用步
骤。
3
关键路线法的应用范围
讨论关键路线法在不同领域中的应用案
如何进行关键路线法分析
4
例和效果。
具体指导如何进行关键路线法分析,以 取得最佳结果。
运筹学课件第8章计划评 审技术与关键路线法
本章讲解运筹学中的计划评审技术和关键路线法。通过这两个方法,我们可 以有效地规划和评估项目的成果与进程。
计划评审技术
计划评审简介
了解计划评审的定义、目的和流程。
计划评审的流程
讨论和确定计划评审的具体步骤和参与者。
计划评审的对象和目的
明确计划评审的对象、目标以及对项目的价值。
总结与展望
计划评审技术பைடு நூலகம்关键路 线法的比较
总结计划评审技术和关键路 线法的优缺点。
运筹学在实践中的应用 价值
讨论运筹学在不同领域中的 应用,为解决实际问题提供 参考。
运筹学的未来发展趋势
展望运筹学未来的发展方向 和可能的创新领域。
计划评审的指标和方法
关键性指标
了解如何选择并评估计划评审的 关键性指标。
头脑风暴
使用头脑风暴来收集和提炼各种 计划评审方法。
会议方法
通过会议和讨论来进行计划评审, 并取得共识。
计划评审的注意事项
1 定期评估
确保计划评审是一个持续 且不断改进的过程。
2 多样化评审人员
邀请不同背景和专业知识 的人员参与评审,确保全 面性。
运筹学——计划评审方法和关键路线法
a 3
3 1 b 3 3 3 c 5
0
7
g 4 6
11
0
11
f 3
5
8
8
工程费用=正常完工直接费用+赶进度增加的直接费用+间接费用 =88+2×1+2×1.5+2×11=115万元。
24 OR:SM
方案4:关键路线b、e上赶进度
3 a 3 3 1 0 b 2 8 h 5 6 d 3 e 4 5 f 3 7 4
作业紧前作业作业时间估计作业时间乐观时间悲观时间可能时间期望方差13101016917三pert应用举例1723231723关键工序的方差2499则px90查表知x13则可接受的合同工期为t2618网络计划优化一缩短工程工期平行作业平行作业指两道以上相互独立的工序同时进行交叉作业交叉作业指将紧前工序完成的部分任务分期分批地转入下道工序利用时差合理调配资源等途径实现19二工期费用优化1工期与成本之间关系工程费用最低的完工时间最低成本日程时间费用极限完工时间正常完工时间直接费用间接费用最优完工时间工程总费用20二工期费用优化寻求最低成本日程的思路
注意:1.
2.
6
总开工、总完工事项都是唯一的;
编号:总开工事项1,各事项编号不重复,任一工序完工事 项编号大于开工事项编号,总完工事项为n.
OR:SM
三、箭线式网络图举例
某工程的工程一览表
工序 紧前工序 工序时间 a -6 b -3 c -4 4 b a 6 c 4 3
7 OR:SM
d a 4
e a,c 5
0
6 g 4 6
10
3
3
3 c 5
10
7
工程费用=正常完工直接费用+赶进度增加的直接费用+间接费用 =88+2×1+2×1.5+1×(1+1.2)+2×11=115.2万元。
运筹学(第7章计划评审方法和关键路线法)
控制成本
通过合理安排资源和时间, 可以控制项目的成本,避 免不必要的浪费。
平衡时间和成本
在优化时间的同时,需要 平衡时间和成本的关系, 以实现整体效益的最大化。
05
PERT/CPM的案例分析
案例一:某软件开发项目的时间管理
项目背景
某软件开发项目,项目周期为18个月,涉及多个模块的开发和集 成工作。
PERT)是一种项目管理
工具,用于评估和优化
项目计划。
03
04
05
ቤተ መጻሕፍቲ ባይዱ
强调时间管理和时间优 化,通过时间参数来评 估项目进度和预测未来 进展。
通过对活动时间和成本 的估算,帮助项目团队 制定更为精确和可行的 计划。
通过概率分析,评估项 目风险和不确定性,为 决策提供依据。
PERT与CPM的关系与区别
01
在制定项目计划时, PERT/CPM可以帮助项目团队 预测项目进度、评估潜在风险 和不确定性,从而制定更为精 确和可行的计划。
02
PERT/CPM的基本原理
活动时间估计
确定活动时间
根据历史数据、专家意见和实际情况,对每个活动 的时间进行合理估计。
考虑不确定性
活动时间可能存在不确定性,如资源可用性、外部 因素等,应进行概率分析。
确定活动概率
根据历史数据和实际情况,确定每个活动的成功概 率和失败概率。
绘制网络图
80%
确定活动及其逻辑关系
根据项目目标和计划,确定各个 活动及其之间的先后逻辑关系。
100%
绘制网络图
使用节点表示活动,使用箭线表 示活动之间的逻辑关系,绘制出 网络图。
80%
优化网络图
根据实际情况和项目要求,对网 络图进行优化,确保其合理性和 可操作性。
05-3计划评审技术与关键路线法
30
各时间参数关系图解
TES 工序a TLS TEF TLF
T(i,j) TES 工序a的紧后工序b
自由时差 总时差
TLS
T(i,j)
TEF TLF
31
[例1]
某设备有一个部件损坏,为进行抢修需 突击制造一个铸件。该铸件利用木模造 型,并需安放I号和Ⅱ号泥芯各四个, 才能合箱浇铸。各项作业内容和计划时 间见表 7-1。 试求完成表上安排的全部计划作业内容, 即从收到图纸、木模开始算起到准备合 箱浇铸,最少需多长时间。并计算网络 图各项参数。(作业最早开始时间、作 业最迟结束时间、时差 )
33
[解]-1
先按表7-1给出的资料画出PERT网络图(见图7-8)。图 中①为整个网络的最初事件,⑦为最终事件。标在箭 线上面的时间是完成各项作业的计划时间。
作业内容 芯骨装配 造型 砂型烘干 芯砂准备 紧前作业 — 1 2 —
芯骨浇铸
型砂准备 造Ⅰ号芯
—
5 4,6
造Ⅱ号芯
Ⅱ号芯干燥
4,6
8
图 7-8
目前这种方法已广泛应用于建筑施工和新产品的研制计划、 计算机系统的安装调试、军事指挥及各种大型复杂工程的 控制管理。 5
第一节 PERT网络图
1. 基本概念 2. 建立PERT网络图的准则和注意事项 3. PERT网络图的合并与简化
6
1.1 PERT网络图的基本概念
作业 job 事件event 路线route
图与网络分析
第六节
计划评审技术与关键路线法
Program Evaluation and Review Technique & Critical Path method
1
计划评审方法和关键路线法

计算结果给出了各个项目的开工时间,如 , 则
1
作业A、B、C的开工时间均是第0天; 作业E的开
2
工时间是第5天; 则作业D的开工时间是第10
3
天; 等等.每个作业只要按规定的时间开工,整个项
4
目的最短工期为51天.
5
尽管上述LINDO程序给出相应的开工时间和整个
两个事件之间只能画一条箭线,表示一 项作业.对于具有相同开始和结束事件的两项以上 作业,要引进虚事件和虚作业. 任何计划网络图应有唯一的最初事件和唯 一的最终事件. 计划网络图不允许出现回路. 计划网络图的画法一般是从左到右,从上 到下,尽量作到清晰美观,避免箭头交叉.
计划网络图的计算
以例7-19的求解过程介绍计划网络图的计算 方法.
01
02
定义7.12 在计划网络图中,称从是初始事
件到最终事件的由各项作业连贯组成的一条路为
路线。具有累计作业时间最长的路线称为关键路
线。
由此看来,例7.19就是求相应的计划网络图
中的关键路线。
任何作业在网络中用唯一的箭线表示,任何作业
其终点事件的编号必须大于其起点事件.
2.建立计划网络图应注意的问题
下面利用LINGO软件完成此项工作.
编写相应的Lingo程序,程序名: exam0721.lg4
MODEL: 1]sets: 2] events/1..8/: x; 3] operate(events, events)/ 4] 1,2 1,3 1,4 3,4 2,5 3,5 4,6 5,6 5,8 5,7 6,7 7,8 6,8 5] /: s, t; 6]endsets 7]data: 8] t = 5 10 11 4 4 0 15 21 35 25 0 15 20; 9]enddata 10]min=@sum(events : x); 11]@for(operate(i,j): s(i,j)=x(j)-x(i)-t(i,j)); END
运筹学第7章计划评审方法和关键路线法

前表对应的网络图。
8
1a
10
b
2
3
6
c
4
8
l
e 24
16
d
5
4
f
24
6
m
11
4
n
12
4g
7 4
i
9
16
j 12 k
10
h 10
8
§2 PERT网络图时间参数的计算
1 事项的参数
EL
1) 事项的最早(可能)开始时刻----E i
事项 i 的最早(可能)开始时刻:在此之前, 事项i 不可能开始。
总开工事项,最早可能开始时刻=0,即E1=0。
4. 施工过程中,工序 d 提早2天完成,工程会提早?
5. 整个施工过程中,为确保工程如期完成,应把关 注的重心放在那几道工序上?
网络计划
例1 建立网络图
工序 产品设计与工艺设计 外购配套件 下料、锻件 工装制造1 木模、铸件 机械加工1 工装制造2 机械加工2 机械加工3 装配调试
工序代号 a b c d e f g h k
c a
d
b
e
网络图的基本概念
(2)工序a有紧后工序c与d,工序d有紧前工序b与a。
a
c
b
d
(3)工序a有紧后工序b与c,工序d有紧前工序b与c。
b
d
a c
网络图的基本概念
(4)工序a有紧后工序b与d,工序c有紧后工序d与e。
b a
d
c
e
网络图的基本概念
5. 工时确定 单一时间确定法:以前多次执行过的、有可靠的生产 定额值的,可以一个确定的时间作为它的工时。
第七章-计划评审方法和关键路径法

工序 a b c d e f - a c c a,b 紧前工序 工序时间(天) 6 9 13 5 16 12 工序 g h i j k l 紧前工序 a,b e,f d,h i h,g g 工序时间(天) 10 12 8 17 20 25
【解】计划网络图如下:
工序
紧前工序 工序时间(天) 工序 紧前工序 工序时间(天)
a b
c d e f
a,6
1
- - a c c
6 9
g h
a,b e,f
10 12
a,b
2
c,13 4
13 5 16 12
d,5 e,16
i j k l
7
h,12 6
d,h i h,g g
i,8
10
8 17 20 25
1、网络图的基本概念
在下图中,A是D、E的紧前工序,D、E是A的紧后工序,F是A的 后续工序但不是A的紧后工序;A是D、E、F的前道工序但不是 F 的紧前工序。 注意紧前工序、紧后工序、前道工序和后续工序之间的关系。
②
A
①
2天
3天
D
4天
E B
3天 ④ 1天 ③
F
6天
⑤
12
C
G H
2天
5天
1、网络图的基本概念
j
k l
i
h,g g i 8 h
17
20 25 j
13
f
17
k t
s 0
b 9
12
g 10
16
12
20
l
0
图7-3(b)节点网络图
常见计划方法与工具
PERT法练习题----建筑房屋事件描述
事件描述
期望时间
紧前事件
A.审查设计和批准动工 B.挖地基 C.立屋架和砌墙 D.建筑楼板 E.安装扇户 F.搭屋顶 G.室内布线 H.安装电梯 I.铺地板和嵌墙板 J.安装门和内部装饰 K.验收和交接
(四)时差
指在不影响整个工程工期的条件下,某项活动在开工时间上可以机动使用的一段时间。 总时差: Si,j = LSi,j―ESi,j = LFi,j―EFi,j = TLj―TEi―Ti,j
(五)关键线路的确定
最长线路法: 所有线路中持续时间最长者; 关键结点法: 所有关键结点连接的线路中持续时间最长者; 时差法 : 所有关键活动构成的线路;
一、传统的计划工具与方法
1.定额换算法:就是根据有关的技术经济定额来计算确定计划指标的方法。 2.系数推导法:是利用过去两个相关经济指标之间长期形成的稳定比率来推算确定计划期的有关指标的方法,也称比例法。 3.经验平衡法:是根据计划工作人员以往的经验,把组织的总目标和各项任务分解分配到各个部门,并经过与各部门的讨价还价最终确定各部门计划指标的方法。
0
*表示所有点,(i,j)表示一项作业,n表示最大结点编号即终点。 TES(1,*)=0,TES(i,j)=max{TES(*,i)+t*i} TEF(i,j)=TES(i,j)+tij TLF(*,n)=max{TEF(*,n)} TLF(i,j)=min{TLF(j,*)-tj*} TLS(i,j)=TLF(i,j)-tij
作业名称和内容
作业代号
后续作业代号
作业长度(月)
设计