海洋磁力仪的原理与技术指标对比分析
磁力仪工作原理

磁力仪工作原理
磁力仪(Magnetometer)是一种测量磁场强度和方向的仪器,广泛应用于地质勘探、矿产勘探、研究地球物理和天文学等领域。
磁力仪的工作原理是基于磁感应定律:
磁感应强度B是由磁场源产生的磁通量φ对于所占据的面积A所计算得出,也就是说,磁场的强度和磁通量密切相关。
在磁力仪中,使用的磁感应强度增量ΔB与被测场的磁感应强度B成正比,即ΔB∝B。
磁力仪通常由一个磁体(或一系列磁体)和一个探测器组成。
磁体通过电流在其内部产生磁场,从而影响到磁场强度和方向。
探测器可以测量磁体周围的磁场强度,并将其转换为电信号,输出到磁力计。
然后,这个信号会被转换为数字形式,通过计算机显示出来。
在磁力测量时,通常将磁力仪沿着被测区域移动。
当磁力仪的探测器测量到变化的磁场强度,就会输出一个信号,称为磁场强度增量。
通过对磁场强度增量的测量和分析,可以确定被测区域的磁场强度和方向。
总的来说,磁力仪的原理就是通过测量磁感应强度的变化来确定被测区域的磁场强度和方向。
它具有高灵敏度和高分辨率,是研究地球物理和天文学的重要工具。
— 1 —。
磁异法探测海底缆线

u Jn 2 cos( r x ) ds H ax x s r
H ay
u Jn 2 cos( r y ) ds y s r
cos r, x , cos r, y 和分别为r与3个坐标轴之夹角的余弦,为磁化 式中 cos r, z , 强度在磁性体外法线上的投影。
2、磁异探测原理
• 磁异常产生的原因
• 铁磁体磁化产生的磁场叠加在海底地磁背景场上,就会产生磁异常 。
是基于铁磁性物体扰乱地磁场磁力线均匀分布这一基本物理现象的。由于磁 场的磁力线从水中进入空气几乎不改变传播方向,而且传播方式几乎一致,
这样我们就能通过在空气中测量磁场的异常来确定水下目标。因此只要获取
3、工程实例分析
• 探测前的准备工作
• 确定作业区域的精确水深,判断海底的地貌情况,了解海 底缆线的存在状态(埋藏、暴露),分析管线区的地表地 质灾害情况。这些资料时进行探测的依据,也是以后缆线 的维护时的参考。
3、工程实例分析
• 测线布设
测线的布设与已知海缆的走向垂直,一般布设测线3-5条。探测过程中的船速 较慢,确保拖鱼接近海底。
4、总结
随着磁力仪灵敏度和磁法勘察精度的提高,磁法勘察作为一项传统的海 洋调查方法,近年来在海洋工程方面得到了新的应用。调查时根据工程 项目实际情况和要求布设测线或测网,工作中适当控制磁力仪探头的深 度和调查船的速度,尽量获取高精度的磁测资料。 海洋磁力探测海底管线主要包括供水、供油、供气、排污等铁质、水 泥质的管线和供电、通信等电缆和光缆,均存在明显的磁异常状况, 可以用来快速准确探明海底管线的平面位置和走向,其优点是显而易 见的,并且完全不受海底管线的埋深限制,是一种探测海底缆线的有 效手段。
海洋磁力仪性能指标分析与测试
第36卷第6期2016年11月海洋测绘HYDROGRAPHIC SURVEYING AND CHARTINGVol. 36,No. 6Nov.,2016D01:10.3969/j.issn.1671-3044.2016.06.009海洋磁力仪性能指标分析与测试任来平\王耿峰、张哲、马越原2,葛忠孝1(1.海军海洋测绘研究所,天津300061; 2.解放军信息工程大学地理空间信息学院,河南郑州400052)摘要:海洋磁力仪性能测试和评价是海洋磁力测量前期技术准备的重要内容,也是当前海洋磁力测量规范要 求的薄弱环节。
研究了海洋磁力仪的性能指标的具体含义,提出了切合实际的海洋磁力仪性能指标测试内容、流 程、方法和要求,采用G-882G SX海洋磁力梯度仪实测数据,计算了海洋磁力仪动态噪声、内符合精度和外符合精 度等关键指标,为海洋磁力仪性能测试工作提供了技术指导,也为海洋磁力仪国产化中面临的性能指标论证和设 计提供了依据。
关键词:海洋磁力仪;性能指标;测试方法;G-882G SX;动态噪声;内符合精度;外符合精度中图分类号:P716+.82 文献标志码:B文章编号:1671-3044(2016)06-0038-051引言随着国家海洋开发战略的实施,海洋磁力仪的应用更加普遍。
按照工作原理,目前使用的海 洋磁力仪可划分为质子磁力仪和光栗磁力仪,均 属于电子仪器[1-2]。
不同类别的磁力仪均具有其优缺点,分别适用于不同的作业场合和作业条件,无法相互取代[3-4]。
国内常用的海洋磁力仪主要 有美国G eom etries公司G-882型光栗磁力仪[5]和 加拿大Marine M a g n e tic s公司的S e a S P Y型 O verhauser质子磁力仪[6]。
质子磁力仪的绝对准确度高、技术成熟、成本低,适用于采样率较低的 绝对测量。
光栗磁力仪采样率最高、噪声水平低,适用于采样率和灵敏度要求较高的相对测量,但 其存在盲区和能耗高等不足。
海洋磁力探测技术的应用研究
海洋磁力探测技术的应用研究海底管线主要包括供水、供油、供气、排污等铁质、水泥质的管线和供电、通信等电缆和光缆,均存在明显的磁异常状况,可以用来快速准确探明海底管线的平面位置和走向,其优点是显而易见的,并且完全不受海底管线的埋深限制。
但是,由于磁法勘探的基础是海底管线与周围介质的磁性差异,这种差异容易受到管线埋深和周围介质的影响,另外,鉴于磁法勘探的深度确定是通过数学计算或正反演拟合而得,故其在纵向深度的探测精度需要其他更加直接的方法验证,比如人工探摸验证,或者采用其他的物探方法进行验证。
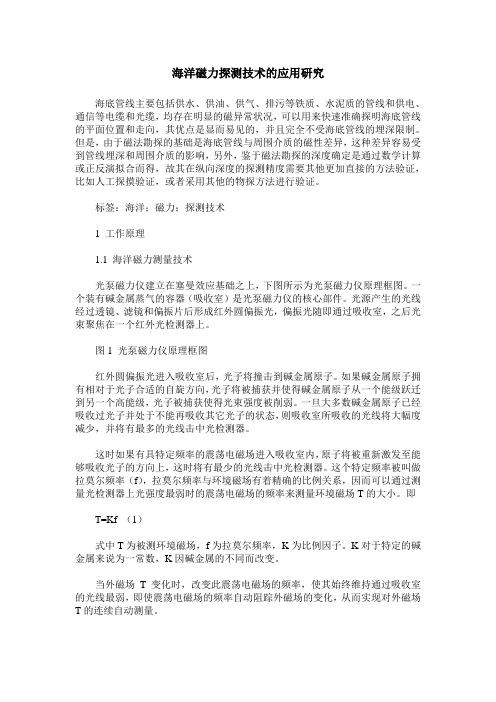
标签:海洋;磁力;探测技术1 工作原理1.1 海洋磁力测量技术光泵磁力仪建立在塞曼效应基础之上,下图所示为光泵磁力仪原理框图。
一个装有碱金属蒸气的容器(吸收室)是光泵磁力仪的核心部件。
光源产生的光线经过透镜、滤镜和偏振片后形成红外圆偏振光,偏振光随即通过吸收室,之后光束聚焦在一个红外光检测器上。
图1 光泵磁力仪原理框图红外圆偏振光进入吸收室后,光子将撞击到碱金属原子。
如果碱金属原子拥有相对于光子合适的自旋方向,光子将被捕获并使得碱金属原子从一个能级跃迁到另一个高能级,光子被捕获使得光束强度被削弱。
一旦大多数碱金属原子已经吸收过光子并处于不能再吸收其它光子的状态,则吸收室所吸收的光线将大幅度减少,并将有最多的光线击中光检测器。
这时如果有具特定频率的震荡电磁场进入吸收室内,原子将被重新激发至能够吸收光子的方向上,这时将有最少的光线击中光检测器。
这个特定频率被叫做拉莫尔频率(f),拉莫尔频率与环境磁场有着精确的比例关系,因而可以通过测量光检测器上光强度最弱时的震荡电磁场的频率来测量环境磁场T的大小。
即T=Kf (1)式中T为被测环境磁场,f为拉莫尔频率,K为比例因子。
K对于特定的碱金属来说为一常数,K因碱金属的不同而改变。
当外磁场T变化时,改变此震荡电磁场的频率,使其始终维持通过吸收室的光线最弱,即使震荡电磁场的频率自动阻踪外磁场的变化,从而实现对外磁场T的连续自动测量。
海洋重磁勘探仪器简介

2011年10月 物 探 装 备第21卷 第5期海洋重磁勘探仪器简介叶宇星* 冀连胜 刘天将(东方地球物理公司综合物化探处,河北涿州072750)摘 要叶宇星,冀连胜,刘天将.海洋重磁勘探仪器简介.物探装备,2011,21(5):308~312 东方地球物理公司综合物化探事业部于2004年、2005年先后引进了先进的海洋重磁勘探仪器———L&R S-Ⅱ型海洋重力仪和G-882型海洋磁力仪。
经过多年的实际应用与探索,目前已形成了较完善的海洋重磁勘探技术。
本文主要介绍L&R S-Ⅱ重力仪及G-882磁力仪两套仪器的软硬件设备及使用、维护技术。
关键词 海洋勘探 L&R S-Ⅱ重力仪 G-882磁力仪ABSTRACTYe Yuxing,Ji Liansheng and Liu Tianjiang.Brief introduction of marine gravity and magnetic exploration equipment.EGP,2011,21(5):308~312 From 2004to 2005,the Integrated Geophysical and Geochemical Division of BGP had purchased the latest ad-vanced marine gravity and magnetic exploration instruments called L &R S-Ⅱtype marine gravimeter and G-882cesium marine magnetometer.After many years of field operation,this division has acquired better understanding ofmarine gravity and magnetic exploration technology.This paper describes the hardware and software consistant aswell as the operation tips and maintenance about this type of equipment.Key words marine exploration,L&R S-Ⅱtype marine gravimeter,G-882cesium marine magnetometer 进入21世纪,电子技术、计算机技术、新型材料及新型制造工艺都得到了迅猛发展。
海洋磁力仪的原理与指标对比

&’ &4 质子旋进式磁力仪工作原理
标准质子旋进式磁力仪原理框图如图 & 所示, 其 传感器内装有少量富质子 ( 氢原子核) 的液体 ( 例如 煤油或甲醇) , 在这些富含氢原子核的液体中, 其它 分子的电子轨道磁矩和自旋磁矩、 原子核自旋磁矩都 成对地彼此抵消, 只有氢原子核的自旋磁矩没有抵 消, 并显示微弱的磁矩。在外磁场为零时, 氢原子磁 矩是任意取向的。如果在液体的周围加有强大的人 造磁场 ( 由线圈产生) , 此磁场引起液体内大多数质 子自旋方向偏向一方, 自旋轴都将转至人造磁场方向 上定向排列。如果人造磁场突然消失, 这时氢原子将 在原有的自旋惯性力和地磁场力的共同作用下, 以相 同相位绕地磁场方向进动, 即质子旋进。质子旋进初 始阶段因相位相同, 显示出宏观的磁性, 它周期性地 切割在容器外的线圈, 产生电感应信号, 其频率和质 子旋进频率相同。由于热搅动的作用, 进动的一致性 将下降, 从而导致电感应信号随之急剧下降, 所以要 在信噪比
经验交流▏G-882G型海洋磁力仪在海洋工程勘察中的性能分析与应用
经验交流▏G-882G型海洋磁力仪在海洋工程勘察中的性能分析与应用伴随国家海洋发展战略的实施发展,海洋磁力仪的应用更加广泛,根据实际应用情况来看,常见的海洋磁力仪类型主要是质子磁力仪和光泵磁力仪,都是电子仪器的一种。
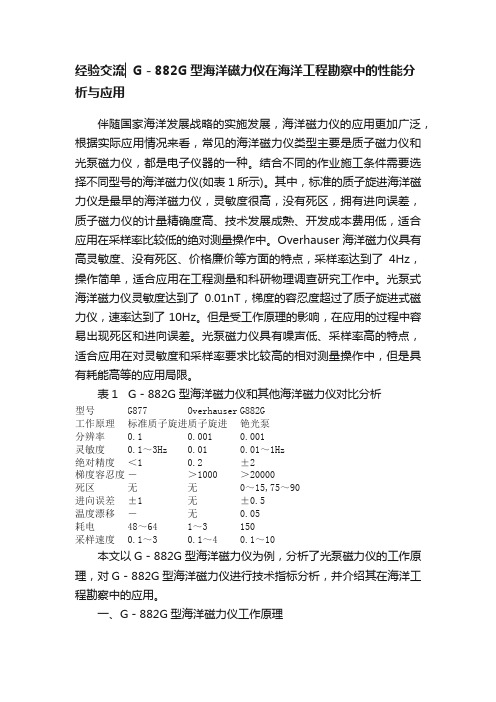
结合不同的作业施工条件需要选择不同型号的海洋磁力仪(如表1所示)。
其中,标准的质子旋进海洋磁力仪是最早的海洋磁力仪,灵敏度很高,没有死区,拥有进向误差,质子磁力仪的计量精确度高、技术发展成熟、开发成本费用低,适合应用在采样率比较低的绝对测量操作中。
Overhauser海洋磁力仪具有高灵敏度、没有死区、价格廉价等方面的特点,采样率达到了4Hz,操作简单,适合应用在工程测量和科研物理调查研究工作中。
光泵式海洋磁力仪灵敏度达到了0.01nT,梯度的容忍度超过了质子旋进式磁力仪,速率达到了10Hz。
但是受工作原理的影响,在应用的过程中容易出现死区和进向误差。
光泵磁力仪具有噪声低、采样率高的特点,适合应用在对灵敏度和采样率要求比较高的相对测量操作中,但是具有耗能高等的应用局限。
表1 G-882G型海洋磁力仪和其他海洋磁力仪对比分析型号G877 Overhauser G882G工作原理标准质子旋进质子旋进铯光泵分辨率0.1 0.001 0.001灵敏度0.1~3Hz 0.01 0.01~1Hz绝对精度<1 0.2 ±2梯度容忍度->1000 >20000死区无无0~15,75~90进向误差±1无±0.5温度漂移-无0.05耗电48~64 1~3 150采样速度0.1~3 0.1~4 0.1~10本文以G-882G型海洋磁力仪为例,分析了光泵磁力仪的工作原理,对G-882G型海洋磁力仪进行技术指标分析,并介绍其在海洋工程勘察中的应用。
一、G-882G型海洋磁力仪工作原理光泵磁力仪工作原理具体如图1所示。
根据图1发现光泵磁力仪的核心部件是含有碱金属蒸汽的容器。
光源产生之后通过透镜、滤镜和偏振片形成红外圆偏振光,红外圆偏振光在经过吸收室之后将所有的光束聚集在一个红外光检测仪器上。
磁力计工作原理

磁力计工作原理磁力计是一种利用磁力作用测量物体磁性的仪器。
它通过测量磁场的变化来确定物体的磁性强度,并将测量结果转化为相应的物理量。
磁力计广泛应用于物理实验、电磁学研究、地球物理勘探等领域。
本文将详细介绍磁力计的工作原理。
一、磁力计的构造磁力计由传感器、信号放大器和转换电路等组成。
传感器是磁力计的核心部件,它负责感受物体周围的磁场,产生相应的电信号。
信号放大器将传感器生成的微弱信号放大,以提高测量的精度。
转换电路将放大后的信号转化为输出,通常以模拟电压或数字信号的形式呈现。
二、磁力计的工作原理磁力计的工作原理基于洛伦兹力和霍尔效应。
当一个导体带有电流通过时,它会在磁场中产生感应力,这就是洛伦兹力的基本原理。
而霍尔效应则是指在导体中流动电流时,垂直于电流方向的磁场产生电势差。
当磁力计中的传感器放置在磁场中时,磁场会影响传感器内部的导体。
导体中的电流与通过导体的外磁场相互作用,产生洛伦兹力。
洛伦兹力使导体发生形变,并引起导体内部电势差的改变。
传感器中通常会包含一个霍尔元件,用于检测电势差的变化。
霍尔元件在导体内产生一个垂直于电流方向的电势差,该电势差与外部磁场的强度成正比。
通过测量霍尔元件上的电势差,就可以确定磁场的强度。
三、磁力计的应用磁力计在各个领域都有广泛的应用。
在物理实验中,磁力计可以用来测量电流、磁感应强度等物理量,从而验证各项物理定律。
在电磁学研究中,磁力计可以用于测量磁场的分布、电流的强度等参数,以探究电磁现象的规律。
在地球物理勘探中,磁力计可以用于测量地球磁场的强度和方向,帮助研究地球的内部结构和磁场变化。
除了科学研究,磁力计还应用于工业生产和日常生活中。
在工业控制系统中,磁力计可以用于测量机器设备的运行状态,保证生产的准确性和稳定性。
在汽车制造中,磁力计可以用来测量车辆速度和方向,提供准确的行驶信息。
总结起来,磁力计是一种利用磁场对导体的作用原理来测量磁性强度的仪器。
通过感受导体中电势差的变化,磁力计可以准确测量磁场的强度。
海洋磁力测量过程中的误差分配规律分析

Advances in Marine Sciences 海洋科学前沿, 2018, 5(2), 57-66Published Online June 2018 in Hans. /journal/amshttps:///10.12677/ams.2018.52007Error Source and Error CompensationMethod in Marine Magnetic SurveyZiqun Yang1, Xuexian Zhang21College of Earth Science and Engineering, Shandong University of Science and Technology, Qingdao Shandong 2Key Laboratory of Marine Sedimentation and Environmental Geology, State Oceanic Administration, FirstInstitute of Oceanography, State Oceanic Administration, Qingdao ShandongReceived: May 9th, 2018; accepted: May 30th, 2018; published: Jun. 6th, 2018AbstractThe errors affecting the marine magnetic force measurement can be divided into real-time mea-surement errors and non-real-time measurement errors. The real-time measurement errors in-clude measurement errors generated by GPS and magnetometer systems. Non-real-time mea-surement errors include errors in the implementation of marine magnetic measurements, drag-ging fish positioning errors, and normal field correction errors, as well as intrinsic daily changes in geomagnetic field, ship magnetic corrections, influences of dragging fish position reduction er-rors, and data collation and error generated by the process. Marine magnetic measurement accu-racy is based on the root mean square value of the measured value difference between the inter-sections of the main and contact survey lines. Errors ultimately affect the RMS value. These errors are compared in marine magnetic surveys of different precisions. Based on the analysis, a data processing model of ocean magnetic measurement error was established, and the distribution rule of the influence of error was found.KeywordsMarine Magnetic Survey, Error Data Processing Model, Error Distribution Rule海洋磁力测量过程中的误差分配规律分析杨子群1,张学贤21山东科技大学地球科学与工程学院,山东青岛2海洋沉积与环境地质国家海洋局重点实验室,国家海洋局第一海洋研究所,山东青岛收稿日期:2018年5月9日;录用日期:2018年5月30日;发布日期:2018年6月6日杨子群,张学贤摘要影响海洋磁力测量的误差可以分为实时测量误差和非实时测量误差,实时测量误差包括GPS、磁力仪系统产生的测量误差。
磁探仪反潜原理

磁探仪反潜原理一、引言在当今海洋安全形势严峻的背景下,反潜作战成为各国海军的重要任务之一。
而磁探仪作为反潜作战中的重要装备,起到了至关重要的作用。
本文将从人类的视角出发,详细介绍磁探仪反潜原理,以期帮助读者更加深入了解这一技术的奥秘。
二、磁探仪的基本原理磁探仪是一种利用磁性物质的磁性特性来探测潜艇的装备。
其基本原理是通过感应潜艇产生的磁场来实现探测。
潜艇在航行过程中会产生一定的磁场,这是由于潜艇内部的电子设备和船体材料中的铁磁性物质所产生的。
磁探仪通过测量这一磁场的变化,从而判断潜艇的存在与否。
三、磁探仪的工作过程1. 磁场探测:磁探仪通过感应线圈接收潜艇产生的磁场信号。
感应线圈的设计使其能够最大程度地接收到潜艇磁场的变化,并将其转化为电信号。
2. 信号处理:磁探仪将感应到的电信号经过放大、滤波等处理,以提高信号的可靠性和准确性。
同时,为了排除其他磁场的干扰,磁探仪还会对信号进行进一步的处理和分析。
3. 数据解读:经过信号处理后得到的数据将被传输到控制中心进行解读。
控制中心根据接收到的数据,通过算法和模型来判断潜艇的位置、方向和速度等信息。
四、磁探仪的优势与局限1. 优势:(1)隐蔽性高:磁探仪是一种被动探测装备,不会主动暴露自身位置,降低了被敌方察觉的概率。
(2)适应性强:磁探仪可以在各种海况下进行工作,对海洋环境的影响较小。
(3)成本相对较低:与其他反潜装备相比,磁探仪的制造和维护成本相对较低。
2. 局限:(1)受环境影响:磁探仪在海洋环境中,受到地磁场和海水电导率等因素的影响,使得探测结果存在一定的误差。
(2)探测距离有限:磁探仪的探测距离受到多种因素的限制,如磁场强度、探测器灵敏度等。
五、结语磁探仪作为反潜作战中的重要装备,凭借其独特的工作原理和优势,在提升反潜作战能力方面发挥着重要的作用。
通过本文对磁探仪反潜原理的介绍,相信读者对磁探仪的工作过程和特点有了更加深入的了解。
磁探仪的不断创新和发展,将为海军反潜作战提供更加强大的支持。
地磁测量原理及海洋磁力仪应用
理南北极不一致
地磁三要素
• 磁场强度 F • 地磁倾角 I • 地磁偏角 D
地磁偏角
• 东偏为正 • 西偏为负
内容提要
1.地磁测量基础
1.1 地磁场及其要素 1.2 地磁场分布和变化规律 1.3 地磁场测量表示
内容提要
1.地磁测量基础
1.1 地磁场及其要素 1.2 地磁场分布和变化规律 1.3 地磁场测量表示
2.海洋磁力仪工作原理和应用
2.1 海洋磁力仪光泵技术原理 2.2 G882海洋磁力仪 2.3 海洋磁力仪磁测实例 2.4 数据采集和典型异常体解释
3.附录(用户名单)
光泵原理 原子的能级及跃迁
• 电子在量子化的轨道(能级)上绕核运动
3.附录(用户名单)
内容提要
1.地磁测量基础
1.1 地磁场及其要素 1.2 地磁场分布和变化规律 1.3 地磁场测量表示
2.海洋磁力仪工作原理和应用
2.1 海洋磁力仪光泵技术原理 2.2 G882海洋磁力仪 2.3 海洋磁力仪磁测实例 2.4 数据采集和典型异常体解释
3.附录(用户名单)
地球的磁场模型
海洋磁力仪地磁测量基础
1.1 地磁场及其要素 1.2 地磁场分布和变化规律 1.3 地磁场测量表示
2.海洋磁力仪工作原理和应用
2.1 海洋磁力仪光泵技术原理 2.2 G882海洋磁力仪 2.3 海洋磁力仪磁测实例 2.4 数据采集和典型异常体解释
光泵磁力仪原理
光源
透镜
滤镜 偏振镜片
地磁场
光电管 透镜 H1 线圈
吸收室
• 先用光泵使所有电子处于同一能级 • H1线圈加拉莫频率的电磁场时,电子在塞曼磁次
海洋磁力场的形成与变化机制

海洋磁力场的形成与变化机制导语:地球上70%的表面被海洋覆盖,海洋是地球上最大的生态系统之一。
而海洋中的磁力场对于地球物理研究具有重要意义。
本文将探讨海洋磁力场的形成与变化机制。
第一部分:海洋的磁性地球的磁场是由地球核内液态外核的流动导致的。
这个流动产生了地球磁场的主要成分,也是大气层和海洋中磁场的主要来源。
然而,与陆地相比,海洋的磁性要复杂得多。
在海洋中,存在很多磁性物质,比如铁磁性的矿物、磁性菌等。
这些物质对海洋的磁力场产生了显著的影响。
第二部分:地壳磁性的贡献除了由海洋中的磁性物质对磁力场的贡献外,地壳中的磁性物质也是海洋磁力场的重要成分之一。
地壳中存在着大量的磁性矿物,比如磁铁矿和赤铁矿等。
这些矿物的磁性可以通过测量地球磁场的变化来研究。
研究表明,地壳中的磁性物质贡献了海洋磁力场的大部分变化。
第三部分:海洋洋底扩张的贡献海洋洋底扩张也对海洋磁力场的变化起到了重要的作用。
海洋洋底上存在着一系列的海山和海沟,这些地质构造的形成与海洋的洋底扩张有着密切的联系。
洋底扩张是海洋地壳从中脊向两侧扩展的过程,同时也是地壳形成和板块运动的结果。
这一过程是由地幔中的岩浆上涌造成的。
在岩浆上涌的过程中,流动的物质会对磁力场产生影响,并且使地壳中的磁性物质定向磁化。
这样,海洋洋底形成的新的磁性物质会加入到海洋磁力场中,影响磁力场的变化。
第四部分:海洋磁场的变化机制海洋磁力场的变化是由多个因素共同作用的结果。
除了地壳中的磁性物质和海洋洋底扩张对磁力场的影响外,其他因素也会对磁力场的变化产生影响。
比如,太阳风和地球磁层的相互作用会产生磁暴,使地球磁场发生短暂的剧烈变化。
此外,地球运动和地幔对流等因素也都会对磁力场的变化起到一定的作用。
结语:海洋磁力场的形成与变化机制是一个复杂而有趣的问题。
通过研究海洋磁力场的变化机制,我们可以更好地理解地球内部的运动和变化。
这对于理解地球的演化过程和预测地球的未来变化具有重要意义。
磁力计的工作原理与应用

磁力计的工作原理与应用磁力计是一种能够测量磁场强度和方向的仪器。
它利用磁力对感应线圈产生的感应电动势进行测量,从而得到磁场的相关信息。
磁力计的工作原理基于法拉第电磁感应定律,即当一个导体环境中发生磁通量的变化时,会在导体中产生感应电动势。
磁力计通常由感应线圈、电路和显示屏组成。
感应线圈是磁力计的核心部分,它由绕制而成的导线组成。
当感应线圈靠近磁场时,磁场的变化会在感应线圈中产生感应电动势。
这个电动势可以通过电路进行放大和处理,最后显示在显示屏上。
磁力计的应用非常广泛。
以下是几个常见的应用领域:1. 科学研究:磁力计在物理学、地球科学、天文学等领域中被广泛使用。
在物理学实验中,磁力计可以用于测量电流、磁场强度等物理量。
在地球科学中,磁力计可以用于研究地球的磁场变化以及地球内部的磁性材料。
在天文学中,磁力计可以用于测量恒星和行星的磁场。
2. 导航和定位:磁力计在导航和定位系统中起着重要的作用。
例如,在磁罗盘中,磁力计被用于测量物体相对于地球磁场的方向,从而确定方向。
在导航系统中,磁力计可以用于辅助GPS定位,提高定位精度。
3. 机器人技术:磁力计在机器人技术中被广泛应用。
机器人通常需要对环境进行感知和导航,磁力计可以帮助机器人测量磁场,以确定自身位置和方向。
磁力计还可以用于机器人的运动控制、姿态估计等方面。
4. 医学领域:磁力计在医学领域中也有重要的应用。
例如,在磁共振成像(MRI)中,磁力计可以用于测量MRI设备中产生的磁场强度,以确保成像质量和安全性。
磁力计还可以用于监测心脏活动、人体运动等方面。
5. 环境监测:磁力计可以用于环境监测,例如测量地磁场的强度和变化。
这对于研究地球磁场的变化、监测地质活动、预测地震等都非常重要。
总之,磁力计是一种重要的测量工具,在科学研究、导航系统、机器人技术、医学领域和环境监测等方面都发挥着重要作用。
通过测量磁场的强度和方向,磁力计为我们提供了对磁场的深入了解,为各个领域的研究和应用提供了有力支持。
G-881 海洋铯光泵磁力仪在海洋工作中的使用

G-881 海洋铯光泵磁力仪在海洋工作中的使用张永昭张清华(广东海事局海测大队)摘要:由于具有高分辨率和高采样率,并且易携带操作,磁力仪在许多兄弟单位已经被广泛应用,它在搜寻沉船、飞机、航标、水雷等各种铁磁性物体中发挥了极大的作用。
希望通过本文能够使磁力仪在大队应急扫测中发挥更大的作用。
关键词:磁场、铁磁性物体、磁异常、磁力线一、地球磁场简介地球磁场作为一个客观存在的物理场已经是被认可的事实。
地磁场存在两极最强,赤道最弱的特征:两极约为60,000nT,赤道约为30,000nT。
地球上的每一点的磁偏角不同:赤道为0°,两极为90°,南半球的磁偏角为正,北半球的磁偏角为负。
地磁场特征如图1所示:60,000nT 30,000nT 60,000Nt图1-地磁场特征但是在地球的某一局部,磁力线平行,磁偏角相同。
由于地壳岩石磁性差异和分布不均匀性所产生的磁场分布变化,或由被探测目标体与周围物质存在磁性差异而产生磁场分布变化的现象,即被称为磁异常。
铁磁性物体在外磁场感应下产生的感应磁化强度存在以下等式:I=KB其中I:感应磁场强度,矢量;K:感应磁化系数,标量;B:外磁场,矢量。
二、磁力仪简介磁力仪主要用来进行地磁场的调查或鉴别磁异常的地质现象。
通过对地磁场的调查,我们可以获得对所调查区域磁场情况的总的了解;而磁异常的测得又为进一步判别被探测体的属性提供第一手数据资料。
按应用范围,磁力仪可划分为陆地、航空和海洋三大类。
海洋磁力仪主要用于海洋灾害地质调查、构造成像以及地质填图等场合,利用原子的能级跃迁时所吸收的辐射光频率与外磁场成正比的原理实现磁场测量的。
G-881海洋铯光泵磁力仪将具有极高分辨率性能的铯蒸气技术组合到低成本、小型化的系统中,具有高灵敏度和高采样率的特征,主要针对在小型船只上作业的浅水调查。
G-881磁力仪尤其适合于探测和定位各种尺寸的铁磁性目标,如铁锚、铁链、电缆、管线、配重石块和其它零散的船只残骸、不同规格的军需品、飞机、引擎和其它具有磁性的目标。
海洋磁力仪的应用
试析海洋磁力仪的应用姜进胜摘要:目前来说,磁力仪分为质子旋进式与光泵式两种基本类型,本文就围绕着质子旋进式与光泵式两种海洋磁力仪对其应用展开了探讨,并且对质子旋进式海洋磁力的一个发展分支——sea spy磁力仪的原理及应用进行了介绍,最后,对海洋磁力仪的其他应用做了简要概述。
关键词:质子旋进式光泵式 sea spy中图分类号:tp212.13 文献标识码:a 文章编号:1672-3791(2012)06(b)-0089-01人们在早期的生产实践活动中就已经对地磁场有了初步的认识,磁力线是从地球的北极出发一直延伸到地球的南极的,随着时间的推移,科技在不断进步,磁力仪的种类发展越来越来多。
众所周知,磁法勘测在海洋地理调查中起着至关重要的作用,所以海洋磁力仪的普及使用也在海洋调查中大面积开展起来。
1 海洋磁力仪的原理与应用在被大家熟知每一片地球区域,相关磁力场都是有规律的存在与分布着的。
某一区域的的磁力场如果受到外界铁质物体的入侵,则这个磁力场将会受到铁质物体在磁力场中产生的相对于本磁力场的外力作用,从而对该磁力场造成干扰。
这些外力干扰基本上都是存在于这个入侵的铁质物体的周围的。
磁力在磁场中的相关应用可以帮助工作人员测量出某个地球区域的磁场强度,如果磁场受到外来入侵,导致了场强变化,放置在其中的磁力仪也会相应地改变磁力数值,由于能够改变磁力场的物质都是铁磁物质构成的,所以磁力仪能够勘测出任何会使磁力场发生改变的物体,同样,磁力仪的使用能够满足人们的应用需要。
海洋磁力仪就是测量地球磁力场强度的一款精度很高的测量设备。
磁力仪的两种基本类型分为质子旋进式与光泵式两种,sea spy磁力仪是质子旋进式的一个发展分支,它也属于质子旋进式。
1.1 质子旋进式磁力仪标准质子旋进式磁力仪是将少量附有氢原子核的液体,比如说甲醇或者煤油之类的,装入其传感器中。
在这些液体中,除了氢原子核能够显示较为微弱的磁矩,其的自旋磁矩并没有被抵消,液体中的其他分子的自旋、电子轨道以及原子核自选的所有相关磁矩都被成对地进行了彼此抵消。
磁力仪原理

磁力仪原理磁力仪是一种测量磁场强度的仪器,它利用磁感应原理来测量磁场的大小和方向。
磁力仪主要由传感器、信号处理器和显示器等部分组成,通过测量磁场的变化来判断被测物体的磁性和磁场强度。
下面将详细介绍磁力仪的原理及其工作过程。
磁力仪的原理是基于磁感应原理的。
根据法拉第电磁感应定律,当导体在磁场中运动或者磁场发生变化时,就会在导体中产生感应电动势。
磁力仪利用这一原理,通过传感器检测磁场的变化,进而测量磁场的强度和方向。
传感器是磁力仪的核心部件,它通常采用霍尔元件或者磁阻元件。
当传感器置于磁场中时,磁场的变化会引起传感器内部的电信号变化,这些变化被传感器捕捉并转化为电信号输出。
信号处理器接收传感器输出的电信号,并对其进行放大、滤波和数字化处理,最终将处理后的信号传输给显示器进行显示。
在磁力仪的工作过程中,当被测物体的磁场发生变化时,传感器会感知到这种变化并将其转化为电信号。
信号处理器对这些电信号进行处理后,显示器会显示出磁场的大小和方向,从而实现对被测物体磁场的测量。
总的来说,磁力仪的原理是基于磁感应原理的,通过传感器检测磁场的变化,信号处理器对信号进行处理后,最终通过显示器显示出磁场的大小和方向。
磁力仪在工业、科研和生活中都有着广泛的应用,如地磁测量、磁材料测试、磁场成像等领域都离不开磁力仪的应用。
总之,磁力仪是一种利用磁感应原理来测量磁场的仪器,其原理简单而有效。
通过传感器、信号处理器和显示器等部件的协同作用,磁力仪能够准确地测量磁场的大小和方向,为科研和生产提供了重要的技术支持。
希望本文能够对磁力仪的原理有所了解,并能够对相关领域的研究和应用提供一定的帮助。
磁力计原理
磁力计原理
磁力计是一种测量磁场强度的仪器,它可以通过测量磁场对磁性物质的作用力
来确定磁场的强度。
磁力计的原理基于磁场对磁性物质的作用力,下面我们将详细介绍磁力计的原理。
首先,磁力计是由磁铁和线圈组成的。
当磁铁靠近线圈时,磁场会在线圈中产
生感应电流,这个感应电流会产生一个磁场,与磁铁的磁场相互作用,从而使线圈受到一个力的作用。
根据洛伦兹力的原理,磁场对运动电荷产生的力与电荷的速度、磁场的强度和方向都有关系。
因此,当磁铁靠近线圈时,线圈中的感应电流会受到磁场的作用力,从而产生一个力矩,使线圈发生转动。
其次,磁力计的原理还涉及到电磁感应现象。
当磁铁靠近线圈时,磁场的变化
会在线圈中产生感应电动势,根据法拉第电磁感应定律,感应电动势的大小与磁场的变化率成正比。
因此,线圈中会产生感应电流,这个感应电流会产生一个磁场,与磁铁的磁场相互作用,从而使线圈受到一个力的作用。
最后,磁力计的原理还涉及到磁场的测量。
根据磁场对磁性物质的作用力,可
以通过测量线圈受到的力来确定磁场的强度。
通常情况下,磁力计会通过测量线圈的转动角度或者测量线圈受到的力来确定磁场的强度。
总的来说,磁力计的原理基于磁场对磁性物质的作用力,通过测量线圈受到的
力或者感应电流来确定磁场的强度。
磁力计在科学实验、工业生产和生活中都有着重要的应用,它可以帮助人们更准确地测量磁场的强度,从而推动科学技术的发展。
外军动态▏日本更新船载海洋磁力仪和海洋重力仪

外军动态▏日本更新船载海洋磁力仪和海洋重力仪日本海上保安厅为确保其海上权益,实施了海洋磁力测量及海洋重力测量,以充实海洋基础信息。
随着观测仪器的老化,日本2012年更新了“拓洋号”测量船上搭载的海洋磁力仪和海洋重力仪,同时更新了“昭洋号”测量船上搭载的海洋重力仪。
1、新装备的海洋磁力仪海洋磁力仪PMP-400是“拓洋号”测量船在2012年10月购进的,同年12月进行安装调试,翌年3月正式列编。
海上保安厅使用的海洋磁力仪是质子旋进磁力仪,主要由拖鱼(传感器)、海洋磁力测量仪组成。
新型海洋磁力仪PMP-400海洋磁力仪PMP-400的工作原理是由拖鱼传感器测量的完整的磁力数据被传输到计测器,将海洋磁力仪数据处理设备及GPS定位设备采集的时间、经纬度、方位及水深数据进行综合后最终生成完整磁力文件,然后依据导入的系统采集的完整磁力文件计算出磁力异常值,并将其保存成最终数据。
由于新系统输出的数据格式与更新前系统采集的数据格式大致相同,因而在后处理时无需做大的变更。
2、新装备的海洋重力仪“昭洋号”测量船和“拓洋号”测量船上装备的Bodenseewerk Geosystem(德国)公司生产的KSS−31型海洋重力仪均更新为Micro−g LaCoste(美国)公司生产的Air−Sea System II型海洋重力仪。
2012年11月“昭洋号”测量船购进新设备,同年12月“拓洋号”测量船购进新设备,在进行了调试及海上试验后,于翌年3月列编。
Air−Sea System II的工作原理是通过利用重锤运动产生重力造成弹簧伸缩,根据弹簧式重力传感器测定重锤的位置、速度、加速度等获得重力值。
新型海洋重力仪系统配置新购进的海洋重力仪由重力仪主体及系统控制部组成。
为了将船舶摇摆的影响减到最小,将重力仪的主体部分安装在船体的重心附近。
观测室的系统控制部可以实时确认设置在20M外的重力仪获取的重力概算值。
存储的数据文件包括dat文件和env文件两种。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
海洋磁力仪的原理与技术指标对比分析第 26卷第 2期海洋测绘Vo l126 , No12 2006年 3 月 M a r1, 2006 H YDRO GRA PH IC SURV EY IN G AND CHAR T IN G海洋磁力异常逼近方法研究1 1 12 1金绍华 ,于波 ,刘雁春 ,翟国君 ,边刚( )11海军大连舰艇学院海洋与测绘科学系 ,辽宁大连 116018; 21海军海洋测绘研究所 ,天津 300061摘要 : 通过对常用的数值逼近方法的分析和研究 ,针对海洋磁力测量的特点 ,仿真计算分析了移动曲面法、H a rdy多面函数法、Shep a rd法和 Kriging法在不同情况下的插值精度。
同时 ,给出了一个实例来计算分析四种逼近方法插值精度。
仿真与实例计算结果表明 ,已知点的分布情况及磁异常变化情况不同时 ,四种逼近方法的插值精度是不同的。
针对不同的情况 ,本文总结出了适合于海洋磁力异常逼近的方法。
关键词 : 海洋磁力异常 ;逼近 ;插值精度+ 中图分类号 : P31816 3 ( ) 文献标识码 : A 文章编号 : 1671 23044 2006 0220006 2032 2 ( ) z x, y = a+ ax + ay + ax y + ax+ ay 0 1 2345 1 引言 ( ) 1( ) ( ) 式中 , z x, y 为已知点 x, y 的磁力异常值 , a、a、 0 1 ,得到由于海洋磁力测量属于点线状测量模式a、a、a、a为拟合系数。
2 3 4 5 的观测结果往往是离散的 ,然而海洋磁场本身却是( ) 由 1 式依据最小二乘原则可以求得拟合系数连续的 ,因此 ,根据观测的离散数据寻找磁场的解析a、a、a、a、a、a, 即可得到曲面方程。
然后依据曲 0 1 2 3 4 5 表达式一直在不断研究探索。
将离散的磁异常值表面方程可求得任一未知点处的逼近值。
示成解析形式 ,便于利用计算机仿真技术模拟海洋[ 3 ]磁场的变化形态 ,反映测区的总体特征。
212 H a rdy多面函数法磁力异常逼近技术是能够反映磁场连续变化的( ) 在平面坐标系中 ,若将磁力异常函数 z x, y 表主要手段 ,对于反映整个中国海区的磁力异常变化示为 : n 特性 ,可以选取均匀分布整个中国海区的离散磁异)( )( ) ( z x, y = aQ x, y, x, y2 i j j ? 常值 ,利用多项式模型、矩谐模型、冠谐模型等建立 j = 1 [ 1 ] 磁异常模型 ,来分析中国海区的磁异常变化。
而 ( ) x , y 为式中 , n 为核函数的个数 ; a 为待定参数 ; i j j 对于小范围的磁异常变化特性可以采用数学逼近方 ( ) 已知磁异常点坐标 ; Q x, y, x, y为核函数 , 一般选 j j 法进行分析与研究。
目前 ,主要的逼近方法有移动用如下形式 :2 2 曲面法、多项式拟合法、多面函数法、移动曲面法、 2ΔδΔ ( ) Q x, y, x , y = x+y+ j jj j Kriging逼近法和 Shep a rd方法。
它们在陆地上重力ΔΔδ式中 , x = x - x; y = y - y;为平滑因子 , 在海 j j j j 异常逼近中取得了良好的效果 ,不失一般性 ,这些方 2 ( δ洋磁力测量中可令 = 0。
对于 m 个已知点 x , 1 法也可用来对海洋磁力测量的异常进行逼近。
本文 ) ( ) ( ) ( ) y, x, y,x, y由 2 式可列 m 个方, 1 2 2 m m 介绍了几种常用的逼近方法 ,并对这些逼近方法在程 , 其矩阵形式为 :海洋磁力异常逼近中的应用作了探讨 ,通过仿真计( )z = Qa3 m ×1 m ×nn ×1 算与实例分析来确定它们在海洋磁力异常逼近中的式中 , 可行性。
)( )( Q x, y; x, y Q x, y; x, y 1 1 1 1 1 1 n n 2 磁力异常逼近方法Q =m ×n)( )( Q x, y; x, yQ x, y; x, y m m 1 1 m m n n 211 移动曲面法 T aaa 12n二次曲面拟合是最常用的逼近方法 ,二次曲面 a= [ 2 ] 表达式为 : 收稿日期 : 2005210210( ) 基金项目 :国家 420专项资助项目 4200502。
( ) 作者简介 : 金绍华 19782,男 ,辽宁普兰店人 ,助教 ,硕士 ,主要从事海洋测量数据处理研究。
3 仿真与实例计算 m 2 2 ΔΔ( )3 V = a- zx+y ii jijij? j = 1 311 仿真计算与分析a 的估值为 : 为了分析各种逼近方法的优缺点 ,又不失一般 T - 1 T () a = Q Q Q z 性 ,本文根据海洋磁力测量的特点 ,仿真了 4 ″×4 ″的( )( ) 将 a 的估值代入 2 式就可以得到内插点的磁网格数据点 ,起始点坐标为 2810 , 12310 。
测点的异常值。
背景场强度采用如下公式计算 :[ 4 ]( )( )13 2z = sin x + y 8 Shep a rd法如果不考虑测区内磁场的曲面形状 ,而认为某 ( ) 式中 , x, y 为某测点的坐标 ; z为此点的海洋磁力点的插值只与邻近数点有关系 ,则某点的磁异常值异常值。
可表示为 : 计算内插值与已知值之间的偏离程度时 ,本文n n υ采用内插值精度 m 和平均残差来表示 ,具体公 z z ( ) ( )z x, y= pz/ p4 i i i?? 式为 :i = 1 i = 1 n ( ( ) ) 式中 , z x, y 是待定点 x, y 的磁异常值 ; n为已知 2 1 / 2 ) ( - d/ n 〕m = 〔z z ii ? i = 1 观测点的个数 ; z是第 i个已知点的磁异常值 ; p为 i i ( )9 n 第 i个已知点权重。
根据相关理论 ,距离越近的点 ( υ= z-) d/ n zi i ? 相互影响越强 , 离待定点近的权重大 , 远的其权值 i = 1υ式中 , m 为内插值精度 ,为平均残差 ; z为内插磁 z z i 小。
本文中直接取距离平方的倒数为权。
力异常值 , 通过具体的逼近方法求得 ; d为已知磁异 214 i Kriging法常值 ; n 为内插点个数。
) ( 假设磁异常函数 z x, y 为平稳随机函数 ,离散( ) 由 8 式可知 , 该仿真区域的磁场变化比较平) ( ) ( 的磁力异常值为 z x, y, 求未知点 x, y处的异 i i p p [ 5,6 ] 缓 ,没有明显的异常突变。
当内插点都位于仿真区) ( 常值 z x, y, 其 Kriging解为 : p p n 域的中间部分时 ,各种) λ( )( )( 5 z x, y= z x, yp p j j j ? 逼近方法的比较结果如表 1。
j= 1λλ内插点位于仿真区域中部时式中 ,称为待定 Kriging权。
要求满足 :j j n ( )n T 表 1 各种内插方法的比较λ= 1 j? H a rdy多面移动曲 j = 1 Shep a rd Kriging 方法 ( )6 面法函数法 n 法法λ D - D = Km 插值精度jiji0 ?1. 5020 0. 0006 0. 0004 0. 0004 j = 1 平均残差 ( ) ( ) 式中 , D是已知观测点 x, y与 x, y之间的协 ij i i j j - 0. 1892 0. 0004 0. 0003 0. 0003方差 ; D 是第 i个已知点与待插点之间的协方差 ; i0 当内插点位于仿真区域的边缘时 ,各种逼近方 Km 为一未知量。
协方差函数为高斯曲线函数式 , 公法的比较结果如表 2。
式为 : 2 2 内插点位于仿真区域边缘时 ( ) ( ) D d = D 0 exp { - kd}( )n T ( ) 表 2 各种内插方法的比较式中 , d 为两点之间的距离 ; D 0 与 k是待定参数。
H a rdy多面移动曲通过已知点的磁力异常值和平面坐标 , 确定该地区 Shep a rd Kriging 方法面法函数法的经验协方差函数。
法法插值精度 1. 3259 3. 2686 2. 4586 1. 2741 ( ) 公式 6 可以写成矩阵形式为 : 平均残差 - 0. 1179 1. 9007 1. 7496 0. 0245 DD1 λ D 111 n101 从表 1 中可以看出 ,由于仿真区域内已知点分 ( )= 7 λ D D D 1 n1 n0 nn n布均匀 , 并且内插点位于仿真区域的中部 , H a rdy1 0 - Km 1 1 多面函数法、Shep a rd法以及 Kriging法的插值精度( ) 通过计算 7 式最后得到 Kriging权的解。
并基本相同 , 移动曲面法的插值精度较低。
在采用 ( ) 代入 5 式求出内插点的磁力异常值。
H a rdy多面函数法时 ,核函数矩阵的计算量较大 ,8 海洋测绘第 26 卷速度较慢 ; Shep a rd 法的计算相对比较简单。
,一般不选用移动曲面法。
磁力异常内插时 Kriging法的计算速度和插值精度都处于 H a rdy多在实例中 ,背景场的海洋磁力异常变化比较平面函数法和 Shep a rd法之间。
从表 2 中可以看出 , 缓 ,已知测点分布比较均匀 , 采用Shep a rd 法和当内插边界地区的磁力异常时 , 由于内插点周围Kriging法进行内插其精度较其他两种方法高 ,并且的已知测点分布不均匀 ,内插值是外推得到 , 各种相差不大 , 但是由于 Shep a rd 方法没有考虑到测点方法的插值精度都大大降低。
移动曲面法和分布的方向性 ,通过仿真计算中可知 ,当已知测点分 Kriging法的插值精度相差不大 , 并且较另外两种布不均匀时 ,该方法的内插精度就会大大降低。
因此 , Kriging法的适用范围较大。
方法的精度高。
在采用 Kringing法时 ,将高斯曲线函数式作为 4 结论其协方差函数 ,可以通过已知点的平面坐标和异常值由最小二乘法求出。
采用移动曲面法时涉及到矩基于海洋磁力测量的特点 ,本文讨论了四种常阵的求逆问题 ,当系数矩阵中的各元素相关性较大用的逼近方法。
每一种逼近方法都有自己的优缺时 ,容易为病态矩阵。
结合在海洋磁力测量的特点 , 点 ,有其固有的适用范围。
采用多面函数法时 ,由于当船速一般在 10 kn左右 ,海洋磁力仪的数据采集率在计算核函数矩阵时计算量较大 , 计算速度较慢。