四相步进电机控制系统设计
大学毕业设计 C51程序控制步进电机

题目:简易步进电机控制步进电机控制摘要:本设计采用ATMEL公司DIP-40封装的AT89S52单片机实现对四相步进电机的手动和按键控制。
由单片机产生的脉冲信号经过分配后分解出对应的四相脉冲,分解出的四相脉冲经驱动电路功率放大后驱动步进电机的转动。
转速的调节和状态的改变由按键进行选择,此过程由程序直接进行控制。
通过键盘扫描把选择的信息反馈给单片机,单片机根据反馈信息做出相应的判断并改变输出脉冲的频率或转动状态信号。
电机转动的不同状态由液晶LCD1602显示出来。
而设计的扩展部分可以通过红外信号的发射由另一块单片机和红外线LED完成,用红外万能接收头接收红外信号,可以实现对电机的控制进行红外遥控。
关键字:四相步进电机单片机功率放大 LCD1602步进电机控制 (1)摘要 (1)关键字 (1)前言 (3)1系统总体方案设计及硬件设计 (4)1.1步进电机 (4)1.1.1 步进电机的种类 (4)1.1.2 步进电机的特点 (4)1.1.3 步进电机的原理 (5)1.2 控制系统电路设计 (7)1.3 液晶显示LCD1602 (7)1.4 AT89S52核心部件及系统SCH原理图 (9)1.5 LN2003A驱动 (10)2软件设计及调试 (13)2.1程序流程 (13)2.2软件设计及调试 (14)3 扩展功能说明 (15)4设计总结 (16)5 设计源程序 (16)6 附录 (21)参考文献 (22)附2:系统原理图及实物图 (23)步进电机广泛应用于对精度要求比较高的运动控制系统中,如机器人、打印机、软盘驱动器、绘图仪、机械阀门控制器等。
目前,对步进电机的控制主要有由分散器件组成的环形脉冲分配器、软件环形脉冲分配器、专用集成芯片环形脉冲分配器等。
分散器件组成的环形脉冲分配器体积比较大,同时由于分散器件的延时,其可靠性大大降低;软件环形分配器要占用主机的运行时间,降低了速度;专用集成芯片环形脉冲分配器集成度高、可靠性好,但其适应性受到限制,同时开发周期长、需求费用较高。
四相步进电机工作原理

四相步进电机工作原理四相步进电机是一种常见的电机类型,它通过控制电流的方向和大小来实现精确的步进运动。
在本文中,我们将深入探讨四相步进电机的工作原理,以及它是如何实现精确的步进运动的。
1. 基本原理。
四相步进电机由四个电磁线圈组成,每个线圈都与电机的一个固定位置相对应。
通过改变这些线圈的电流方向和大小,可以控制电机的转动。
通常情况下,四相步进电机会采用双极或四极设计,这意味着每个线圈都有两个状态,通电和断电。
通过改变线圈的通断状态,可以实现电机的步进运动。
2. 步进控制。
四相步进电机的步进控制是通过改变线圈的通断状态来实现的。
通常情况下,电机会按照固定的步距进行旋转,每一步的大小由线圈的设计和控制电流的大小决定。
通过改变线圈的通断状态和电流的大小,可以实现不同步距的步进运动,从而实现精确的位置控制。
3. 驱动方式。
四相步进电机的驱动方式通常有两种,全步进和半步进。
全步进是指每次只激活一个线圈,电机按照固定的步距进行旋转。
而半步进则是在全步进的基础上,每次激活两个相邻的线圈,从而实现更精细的步进运动。
通过这两种驱动方式的组合,可以实现更加精确的位置控制。
4. 控制电路。
为了实现对四相步进电机的精确控制,通常需要使用特定的控制电路。
这些控制电路可以根据输入的控制信号来改变线圈的通断状态和电流大小,从而实现精确的步进运动。
常见的控制电路包括脉冲控制器和驱动器,它们可以根据输入的脉冲信号来控制电机的旋转方向和步距。
5. 应用领域。
四相步进电机由于其精确的位置控制和简单的结构,被广泛应用于各种领域。
例如,它常用于打印机、数控机床、3D打印机和机器人等设备中,用于实现精确的位置控制和运动控制。
此外,四相步进电机还常用于需要精确控制的仪器和设备中,如医疗设备和实验仪器等。
总结。
四相步进电机是一种常见的电机类型,它通过改变线圈的通断状态和电流大小来实现精确的步进运动。
通过控制电机的驱动方式和控制电路,可以实现更加精确的位置控制和运动控制。
四相步进电机驱动电路及驱动程序设计
四相步进电机驱动电路及驱动程序设计我们用一个单片机控制多个步进电机指挥跳舞机器人的双肩、双肘和双脚伴着音乐做出各种协调舒缓充满感情的动作,荣获一等奖。
电路采用74373锁存,74LS244和ULN2003作电压和电流驱动,单片机(Atc52)作脉冲序列信号发生器。
程序设计基于中断服务和总线分时利用方式,实时更新各个电机的速度、方向。
整个舞蹈由运动数据所决定的一截截动作无缝连接而成。
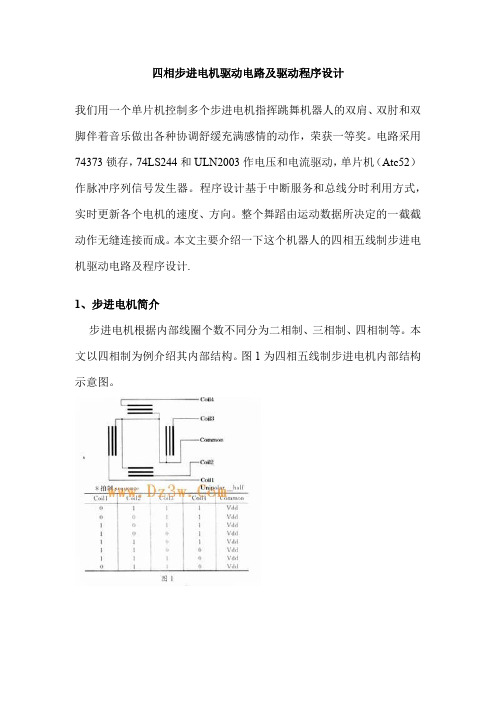
本文主要介绍一下这个机器人的四相五线制步进电机驱动电路及程序设计.1、步进电机简介步进电机根据内部线圈个数不同分为二相制、三相制、四相制等。
本文以四相制为例介绍其内部结构。
图1为四相五线制步进电机内部结构示意图。
2、四相五线制步进电机的驱动电路电路主要由单片机工作外围电路、信号锁存和放大电路组成。
我们利用了单片机的I/O端口,通过74373锁存,由74LS244驱动,ULN2003对信号进行放大。
8个电机共用4bit I/O端口作为数据总线,向电机传送步进脉冲。
每个电机分配1bit的I/O端口用作74373锁存信号,锁存步进电机四相脉冲,经ULN2003放大到12V驱动电机运转。
电路原理图(部分)如图2所示。
(1)Intel 8051系列单片机是一种8位的嵌入式控制器,可寻址64K字节,共有32个可编程双向I/O口,分别称为P0~P3。
该系列单片机上集成8K的ROM,128字节RAM可供使用。
(2)74LS244为三态控制芯片,目的是使单片机足以驱动ULN2003。
ULN2003是常用的达林顿管阵列,工作电压是12V,可以提供足够的电流以驱动步进电机。
关于这些芯片的详细介绍可参见它们各自的数据手册。
(3)74373是电平控制锁存器,它可使多个步进电机共用一组数据总线。
我们用P1.0~P1.7作为8个电机的锁存信号输出端,见表1。
这是一种基于总线分时复用的方式,以动态扫描的方式来发送控制信号,这和高级操作系统里的多任务进程调度的思想一致。
四相八拍步进电机控制电路
四相八拍步进电机控制电路
步进电机在各种自动控制领域中有着广泛的应用,它通过精确的位置控制和简单的控制电路设计,实现了高效的运行。
在步进电机中,四相八拍步进电机是一种常见的类型,它具有结构简单、控制方便等特点,因此得到了广泛采用。
步进电机的控制原理基于控制电路对电机内部各个线圈的通断控制,从而实现单步运动。
四相八拍步进电机由四个线圈组成,按相间夹角为90度的顺序连接,每相均可单独控制。
常见的步进电机控制电路包括单片机控制、逻辑门控制等。
在设计四相八拍步进电机控制电路时,首先需要确定电机驱动方式。
常见的方式包括全步进驱动和半步进驱动。
全步进驱动中,电机每步转动一个完整的步进角度;而在半步进驱动中,电机每步转动半个步进角度。
选择不同的驱动方式可以实现不同的转动精度和速度要求。
控制电路中常用的元器件包括晶体管、电阻、电容等。
通过合理的连接和控制,可以使步进电机按照预先设定的步进序列运行。
在具体设计电路时,需要根据电机的参数和工作要求,选择合适的元器件和控制方式,并进行电路调试和优化。
为了确保步进电机的稳定运行,还需要注意电源稳定性和线圩的连接质量。
稳定的电源可以提供电机正常工作所需的能量,而良好的线圩连接可以减小电机运行时的噪音和振动,延长电机使用寿命。
总的来说,四相八拍步进电机控制电路是实现步进电机精准运动的关键,通过合理的设计和调试,可以有效地实现对电机位置的控制。
在实际应用中,可以根据具体要求进行电路的定制设计,以满足不同场景下步进电机的控制需求。
1。
步进电机控制系统设计
摘要步进电机是一种将输入的电脉冲信号变换为阶跃性角位移或直线位移的电机,既给一个脉冲信号,电机就转动一个角度或前进一步,故而又称为脉冲电机。
它输出的角位移与输入的脉冲数成正比,转速与脉冲频率成正比。
步近电机必须与驱动器、控制器配套使用才能完成工作要求。
本设计既有硬件电路设计,也包括软件电路设计。
其中硬件电路设计主要有键盘电路,串行显示电路,驱动电路等。
软件设计主要有主程序,键盘扫描子程序,串行显示子程序和延时子程序等。
硬件设计采用57BYG350A型号的步进电机,与其配套的驱动器型号为MS-3H057M系列驱动器。
采用AT89S51单片机对步进电机进行控制,通过4×4矩阵键盘对步进电机的状态进行控制,采用LED数码管来显示步进电机的运行步数和运行速度。
关键字:步进电机,AT89C51,硬件接口电路,软件模块AbstractTread into the electrical engineering(The Stepping Motors) is a kind of electricity pulse signal transformation that will input to jumpssex Cape move or the straight line to move for the rank of electrical engineering, since give a pulse signal, the electrical engineering turns to move an angle or fronts further, hence be called the pulse electrical engineering again.Its output's Cape move with the importation of pulse the number becomes the direct proportion, turning to become the direct proportion with the pulse frequency soon.Tread the near electrical engineering must then can complete the work request with actuator, the controller kit usage.The design of both hardware circuit design, including software design. One major hardware circuit design circuit has a keyboard, serial show circuit, the driver circuit. Software Design main main program, keyboard scanning routines, serial display routines and routines, and so delayed. 57 BYG350A hardware design using models of stepping motor, instead of supporting the drive models for MS-3H057M series drives. AT89S51 microcontroller used to stepping motor control, through the 4 × 4 matrix key board on the status of stepping motor control, the use of LED digital display of the stepping motor running steps and speed.Keyword: stepping motor,AT89S51, Hardware circuit, Software module1 绪论1.1 课题背景步进电机是一种将电脉冲转化为角位移的机电执行元件,每外加一个控制脉冲,电机就运行一步故称为步进电机或脉冲马达。
四相五线步进电机程序设计流程

四相五线步进电机程序设计流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!1. 确定电机控制方式选择合适的控制方法,如脉冲宽度调制(PWM)或脉冲频率调制(PFM)。
PLC实训程序--步进电机的PLC控制

步进电机的PLC控制一、实验目的1、掌握PLC控制的基本原理,掌握移位寄存器的使用。
2、掌握步进电机的工作原理,掌握环形分配器的使用方法。
3、掌握运用PLC驱动步进的方法。
二、实验器材1、PLC-2型可编程控制器实验台1台2、步进电机的PLC控制演示板1块3、PC机或手持编程器1台4、编程电缆1根5、自锁式连接导线若干图16.1三、实验原理与实验步骤1、步进电机的PLC控制演示板如图16.1所示。
2、实验原理本演示装置采用的四相步进电机,运用PLC设计一个步进电机的环形分配器的软件程序。
以此来实现步进电机的单步,连续运转。
四相步进电机的结构如下图所示。
演示板上四个LED发光管分别代表步进电机的四个相位。
3、设计要求:按照步进电机的工作方式,设四相线圈分别为A、B、C、D,公共端为E、F。
当电机正向转动时其工作时序如下:A→AB→B→BC→C→CD→D→DA当电机反向转动时其工作时序如下:A←AB←B←BC←C←CD←D←DA要求慢速度为I S—格,快速度为0.1S—格。
4、实验步骤:(1)打开PLC-2型实验台电源,编程器与PLC连接。
(2)根据具体情况编制输入程序,并检查是否正确。
(3)实验台与PLC-DOME008连接,检查连线是否正确。
(4)按下启动按钮,观察运行结果。
四、设计程序清单1、I/O地址分配清单:输入地址:正向启动X0 反向启动X1停止X2 速度控制X3 输出地址: A Y0 B Y1C Y2 C Y3E\F COM2、程序(1)指令表0 LD X0001 OR S02 ANI X0013 ANI X0024 OUT S06 LD X0017 OR S18 ANI X0009 ANI X00210 OUT S112 LD X00313 CJ P0 16 LDI T33 26 OUT Y01527 LDI X00328 CJ P131 P032 LDI T3333 OUT T32 K136 LD T3237 OUT T33 K140 OUT S242 OUT Y01543 P144 LD S245 PLS M1051 ANI M552 ANI M653 ANI M754 AND S155 LDI M256 ANI M357 ANI M458 ANI M559 ANI M660 ANI M761 ANI M862 AND S063 ORB68 AND S069 SFTR M0 M1 K8 K178 MPP79 AND S180 SFTL M0 M2 K8 K189 LD M190 OR M291 OR M892 OUT Y00093 LD M294 OR M395 OR M496 OUT Y00117 OUT T32 K520 LD T3221 OUT T33 K5 24 OUT S2101 LD M6102 OR M7 47 LDI M148 ANI M249 ANI M350 ANI M4103 OR M864 OUT M065 LD M800266 OR M1067 MPS104 OUT Y00397 LD M498 OR M599 OR M6100 OUT Y002105 END梯形图接线图※FX系列的输出继电器的公共端:FX2N-32MR为COM0~COM4;FX2N-48MR为COM0~COM5; FX1N-60MR为COM0~COM7五、思考题1、如果是三相步进电机,工作方式为三相六拍,程序该如何编制?2、如果是E、F公共端不接,作为二相时机使用,程序又该如何处理?。
四相步进电机原理图
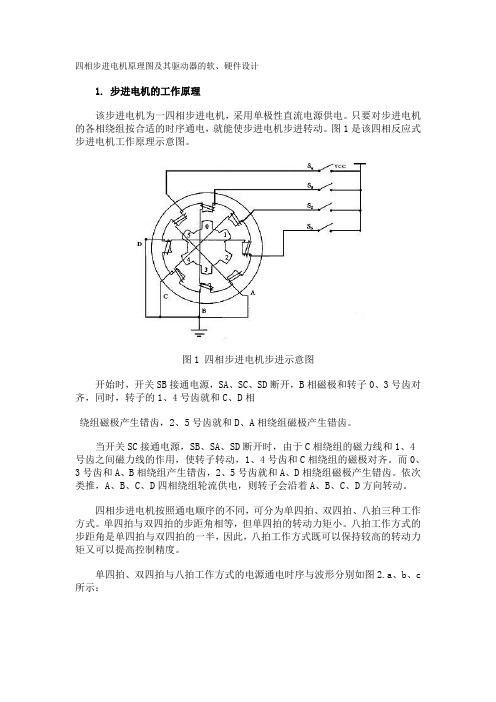
四相步进电机原理图及其驱动器的软、硬件设计1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c 所示:a. 单四拍b. 双四拍 c八拍图2.步进电机工作时序波形图2.基于AT89C2051的步进电机驱动器系统电路原理步进电机驱动器系统电路原理如图3:图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
使步进电机随着不同的脉冲信号分别作正转、反转、加速、减速和停止等动作。
图中L1为步进电机的一相绕组。
AT89C2051选用频率22MHz的晶振,选用较高晶振的目的是为了在方式2下尽量减小AT89C2051对上位机脉冲信号周期的影响。
写出四相八拍步进电机的控制模型

写出四相八拍步进电机的控制模型步进电机是一种常见的电动机,通过控制电流方向改变磁场来驱动转子运动。
四相八拍步进电机是其中一种类型,它包含四个相,每相有两个步进角度,总共有八拍。
在控制步进电机时需要了解其控制模型,以便准确控制其转动角度和速度。
步进电机的工作原理步进电机的运动是通过将电流施加到电机的不同相上,使得产生的磁场相互作用而形成驱动力,从而使转子运转。
对于四相八拍步进电机来说,控制每个相的电流能够实现准确的步进角度,从而控制电机的转动。
控制模型控制四相八拍步进电机的关键在于确定每个步进角度的电流控制。
一种常用的控制模型是利用微控制器或控制器来控制电机的电流输出。
通过适当的算法,可以实现精确的步进角度控制,从而控制电机的转动。
步进角度控制步进电机的每个步进角度由控制电流的波形决定。
在四相八拍步进电机中,可以通过改变每相的电流顺序和大小来控制电机的步进角度。
例如,按照ABCD的顺序控制每相电流,就可以实现电机的顺时针或逆时针转动,从而控制步进角度。
控制算法控制四相八拍步进电机的算法种类繁多,常见的有正弦曲线控制、脉冲信号控制等。
这些算法可以根据电机的具体应用需求进行选择,以实现最佳的电机控制效果。
通过合理选择和调整算法参数,可以实现步进电机的平稳转动和精确控制。
应用领域四相八拍步进电机广泛应用于打印机、CNC机床、自动化设备等领域。
在这些领域中,步进电机的精确控制和可靠性是非常重要的,只有准确地控制电机的步进角度,才能实现设备的高效运行和稳定性。
结语四相八拍步进电机的控制模型是实现电机精确控制的关键。
通过了解步进电机的工作原理、控制模型以及相应的控制算法,可以实现对电机转动角度和速度的精确定位和控制。
在实际应用中,需要根据具体需求选择合适的控制方法,以确保步进电机的稳定运行和精准控制。
步进电机控制系统设计
INC AL
JZ MAIN1
CALL XIAN
MOV AL,[DI]
OUT DX,AL
CALL DLY
INC DI
DEC BL
JNZ SHSIF2
DEC CL
JNZ SHSIF0
JMP WAIT00
MAIN11:JMP MAIN1
;四相八拍正转
SIBAZH:
MOV AL,02H
MOV DX,MY8255_C
OUT DX,AL
CALL DLY
INC DI
DEC BL
JNZ SIBAF2
SIBAF0:MOV AH,0BH
INT 21H
INC AL
JZ MAIN11
LEA BX,TABLE1
MOV AL,CL
XLAT
MOV DX,MY8255_A
OUT DX,AL
SIBAF1:
MOV BL,08H
MOV DX,MY8255_B
LEA DI,TABBF
SIBAF2:CALL XIAN
MOV AL,[DI]
OUT DX,AL
CALL DLY
INC DI
DEC BL
JNZ FANSI2
DEC CL
JNZ FANSI0
JMP WAIT00
;中间跳转
SIBA0: JMP SIBAZH
SIBA1: JMP SIBAF
MAIN1: JMP MAIN
QUIT1: JMP QUIT
;双四拍正转
SHSIZH:
MOV AL,02H
3.2流程图- 6 -
4结束语- 6 -
1
步进电动机是一种将电脉冲信号转换相应的角位移的特种电动机。是工业过程控制及仪表中的主要控制元件之一。步进电动机具有快速起动能力,而且精度高,在数字控制系统中可以直接接受来自计算机的数字信号,不需要进行数/模转换,所以步进电动机在定位场合得到了广泛应用。
步进电机控制系统设计

步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件,具有快速启动能力,定位精度高,能够直接接受数字量,因此被广泛地应用于数字控制系统中,如数模转换装置、精确定位、计算机外围设备等,在现代控制领域起着非常重要的作用。
本设计运用了8086 CPU芯片以及74273芯片、8255A芯片和步进电机以及7位小功率驱动芯片ULN2003A、指示灯等辅助硬件电路,设计了步进电机正反转及调速系统。
绘制软件流程图,进行了软件设计并编写了源程序,最后对软硬件系统进行联合调试。
该步进电机的正反转及调速系统具有控制步进电机正反转的功能,还可以对步进电机进行调速。
关键词:步进电机;正反转;调速控制;ULN2003A芯片;8086微机系统1、课程设计任务书1.1任务和目的 (4)1.2设计题目 (4)1.3内容和要求 (4)1.4列出使用元器件和设备清单 (4)2、绪论 (4)3、步进电机的总体方案 (6)4、步进电机的硬件设计 (7)4.1总体设计思路 (7)4.2电路原理图 (10)4.3线路连接图 (11)5、步进电机软件设计 (12)5. 1流程图 (12)5.2控制程序 (14)&调试说明 (19)6.1调试过程 (19)6.2调试缺陷 (19)7、总结收获 (19)8、参考文献 (20)附录:元器件及设计清单1. 课程设计任务书1.1任务和目的掌握微机硬件和软件综合设计的方法。
1.2设计题目步进电机控制系统设计1.3内容和要求1. 基本要求:控制步进电机转动,要求转速1步/1秒;设计实现接口驱动电路。
2. 提高要求:改善步进电机的控制性能,控制步进电机转/停;正转/反转;改变转速(至少3挡);1.4列出使用元器件和设备清单8086cpu可编程并行接口8255指示灯键盘74LS138译码器驱动模块步进电机2. 绪论步进电机又称脉冲电动机或阶跃电动机,国外一般称为Step motor或Steeping motor、Stepper servo Steppe,等等。
基于CPLD的步进电机控制系统设计

计数器模块仿真波形图
块和步进电机驱动 3 个模块,原理如图 7 所示。
译码器模块将计数器模块产生的 q1、q2 两个信号
通 过 译 码 输 出 为 out1、out2、out3、out4 4 个 输 出 信 号 。
并根据 q1、q2 的数据(0、1)的循环变换,out1、out2、out3、
out4 进行循环移位。四相单四拍定义为,正转输入信
上实现对步进电机的运行控制和工作模式选择。
收稿日期:2020-06-26
稿件编号:202006148
1 软件开发环境
CPLD 有 Synplify、Synopsps、Quartus II、ZLGICD、
ISD51 和 MAX+PLUSII 等软件开发环境。该设计采
用的是 Altera 公司提供的 MAX+PLUSII 开发集成环
phases single double four steps and four phases eight steps operation control and working mode selection
of stepping motor are realized by DP-MCU/Altera comprehensive simulation experiment instrument. The
图 7 四相八拍控制原理图
在半步驱动模块中,设定其正转输入信号顺序
号 以 1000→0100→0010→0001→1000 进 行 循 环 ,反
为:
1000→1100→0100→0110→0010→0011→0001→
行 循 环 。 四 相 双 四 拍 定 义 为 ,正 转 输 入 信 号 以
步进电机控制系统设计 (毕业设计论文)

附一:封面**********学院毕业设计(论文)题目:步进电机控制系统设计专业:班级:姓名:学号:指导教师:2055 年 5 月 5 日附二:成绩评议表*************学院毕业设计(论文)成绩评议专业班级姓名学号题目步进电机控制系统设计指导教师评阅成绩评定:指导教师:年月日评阅教师意见评阅教师:年月日答辩小组意见答辩小组负责人:年月日中文摘要1、步进电机概述列出了步进电机的特点、技术参数和分类,并阐述了详细调速原理。
2、方案的论证确定了步进电机的控制方法、驱动方式、驱动电路以及基本方案。
3、硬件电路的设计对单片机、步进电机、驱动电路、显示电路与键盘、反馈电路进行了选择,并设计了电源电路、抗干扰及看门狗电路。
4、软件的设计对显示子程序、键盘子程序、驱动程序流程进行了设计,并绘制了正反转程序流程图。
5、总结关键词:步进电机 单片机 调速系统目录前言-----------------------------------------------05第一章步进电机概述---------------------------------061.1 步进电机的特点-----------------------------061.2 步进电机的技术参数-------------------------071.2.1步进电机的基本参数---------------------071.2.2步进电机动态指标及术语-----------------081.3步进电机的分类------------------------------101.4步进电机详细调速原理------------------------12第二章方案的论证-----------------------------------142.1控制方式的确定------------------------------142.2驱动方式的确定------------------------------162.3驱动电路的选择------------------------------172.4基本方案的确定------------------------------18第三章硬件电路的设计-------------------------------203.1单片机的选择--------------------------------203.1.1单片机的选择---------------------------203.1.2主要特性-------------------------------223.2步进电机的选择------------------------------233.2.1三相单三拍通电方式---------------------243.2.2三相双三拍通电方式---------------------253.3驱动电路的选择------------------------------293.4显示电路与键盘的选择------------------------313.5反馈电路的选择------------------------------34第四章软件的设计-----------------------------------374.1显示子程序的设计----------------------------374.2键盘子程序的设计----------------------------374.3驱动程序流程的设计--------------------------384.4正反转程序流程图----------------------------394.4.1正反转程序流程图----------------------394.4.2转速快慢程序流程图--------------------404.4.3定时中断流程图------------------------41五总结-------------------------------------------42前言第一章步进电机概述1.1步进电机的特点:1)一般步进电机的精度为步进角的3-5%,且不累积。
四相步进电机的三种控制方法

四相步进电机的三种控制方法四相步进电机是一种常用的电机,其控制方法有多种。
下面将介绍其中的三种控制方法。
1. 单板机控制单板机控制是一种非常常见的控制方法,其原理是通过使用控制芯片驱动四相步进电机,实现步进电机的精确控制。
单板机控制器通常由两部分组成:驱动电路和控制电路。
驱动电路由四个 MOSFET 组成,可分别控制四种不同的相序。
控制电路与驱动电路集成在控制芯片中。
单板机控制对于复杂步进电机的控制具有很高的可扩展性。
此外,在一些较小的应用中,这种控制方法还具有成本较低的优势。
2. PLC 控制PLC(可编程逻辑控制器)是一种通用的控制器,其功能与单板机控制类似,但具有更高的可编程性和灵活性。
通过配置软件,用户可以使用 PLC 控制器轻松实现四相步进电机的控制。
与单板机控制相比,PLC 控制的优势在于其对于复杂控制任务的处理能力更强。
此外,PLC 控制器通常支持多种不同的通信协议,使其更易于与其他设备进行集成。
3. 微控制器控制微控制器控制是一种集成度高的控制方案。
在这种方案中,微控制器被用作控制逻辑和驱动输出的单元。
与 PLC 控制器相比,微控制器控制的成本相对较低,并且通常具有更小的物理尺寸。
与单板机控制和 PLC 控制相比,微控制器控制的优势在于其高度集成的性质。
这意味着可以将其集成到其他系统中,以实现复杂的控制任务。
此外,由于其成本相对较低,因此可以大规模应用于消费类电子产品等应用中。
总体来说,三种控制方法各具特点,可以根据具体应用场景选择最适合的控制方案。
不论选择哪一种控制方法,都可以通过精确控制四相步进电机来实现高度自动化的系统。
四相步进电机原理图及程序

四相步进电机原理图本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。
1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:a. 单四拍b. 双四拍c八拍图2.步进电机工作时序波形图2.基于AT89C2051的步进电机驱动器系统电路原理步进电机驱动器系统电路原理如图3:图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
使步进电机随着不同的脉冲信号分别作正转、反转、加速、减速和停止等动作。
图中L1为步进电机的一相绕组。
AT89C2051选用频率22MHz的晶振,选用较高晶振的目的是为了在方式2下尽量减小AT89C2051对上位机脉冲信号周期的影响。
四相双四拍步进电机控制系统设计解读

1引言本实验旨在通过控制AT89S52芯片,实现对四相步进电机的转动控制。
具体功能主要是控制电机正转、反转、加速与减速。
具体工作过程是:给试验箱上电后,拨动启动开关,步进电机按照预先设置的转速和转动方式转动。
调整正反转按钮,步进电机实现正反转切换;拨动加速开关,步进电机转速加快,速度达到最大值,不再加速;拨动减速开关时,电机减速转动,速度减到最小速度,停止减速。
89C58)芯片、拨码开关单元、四项步进电机等硬件设备。
实验具体电路单元有:单片机最小系统、步进电机连接电路、拨码开关连接电路。
2四项步进电机2.1 步进电机步进电机是一种将电脉冲转化为角位移的执行机构。
电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
2.2 步进电机的共组原理2.2步进电机的控制1.换相顺序控制:通电换相这一过程称为脉冲分配。
例如:混合式步进电机的工作方式,其各相通电顺序为A-B-C-D,通电控制脉冲必须严格按照这一顺序分别控制A,B,C,D相的通断。
2.控制步进电机的转向控制:如果给定工作方式正序换相通电,步进电机正转,如果按反序通电换相,则电机就反转。
3.控制步进电机的速度控制:如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
2.3步进电机的工作过程开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机原理图及其驱动器的软硬件设计
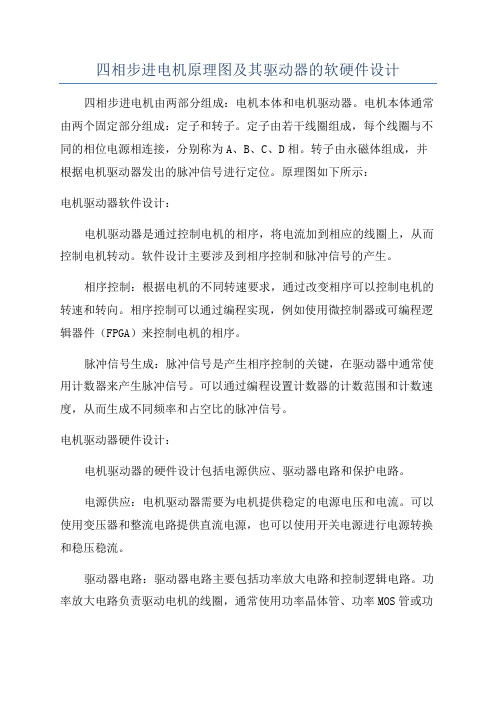
四相步进电机原理图及其驱动器的软硬件设计四相步进电机由两部分组成:电机本体和电机驱动器。
电机本体通常由两个固定部分组成:定子和转子。
定子由若干线圈组成,每个线圈与不同的相位电源相连接,分别称为A、B、C、D相。
转子由永磁体组成,并根据电机驱动器发出的脉冲信号进行定位。
原理图如下所示:电机驱动器软件设计:电机驱动器是通过控制电机的相序,将电流加到相应的线圈上,从而控制电机转动。
软件设计主要涉及到相序控制和脉冲信号的产生。
相序控制:根据电机的不同转速要求,通过改变相序可以控制电机的转速和转向。
相序控制可以通过编程实现,例如使用微控制器或可编程逻辑器件(FPGA)来控制电机的相序。
脉冲信号生成:脉冲信号是产生相序控制的关键,在驱动器中通常使用计数器来产生脉冲信号。
可以通过编程设置计数器的计数范围和计数速度,从而生成不同频率和占空比的脉冲信号。
电机驱动器硬件设计:电机驱动器的硬件设计包括电源供应、驱动器电路和保护电路。
电源供应:电机驱动器需要为电机提供稳定的电源电压和电流。
可以使用变压器和整流电路提供直流电源,也可以使用开关电源进行电源转换和稳压稳流。
驱动器电路:驱动器电路主要包括功率放大电路和控制逻辑电路。
功率放大电路负责驱动电机的线圈,通常使用功率晶体管、功率MOS管或功率集成电路来实现。
控制逻辑电路负责接收脉冲信号并产生相序控制信号,可以使用逻辑门电路和触发器电路来实现。
保护电路:保护电路用于保护电机和驱动器免受过压、过流等异常情况的损害。
常见的保护电路包括过压保护、过流保护和过热保护等。
综上所述,四相步进电机的驱动器软、硬件设计涉及到相序控制、脉冲信号生成、电源供应、驱动器电路和保护电路等内容,通过合理的设计和控制可以实现对电机的精确控制和驱动。
基于单片机实现的四相步进电机控制器毕业设计
基于单片机实现的四相步进电机控制器设计指导老师:作者:摘要:本设计采用ATMEL公司DIP-40封装的AT89S52单片机实现对四相步进电机的手动和遥控控制。
由单片机产生的脉冲信号经过脉冲分配后分解出对应的四相脉冲,分解出的四相脉冲经驱动电路功率放大后驱动步进电机的转动。
转速的调节和状态的改变由按键进行选择。
通过键盘扫描把选择的信息反馈给单片机,单片机根据反馈信息做出相应的判断并改变输出脉冲的频率或转动状态信号。
电机转动的不同状态由LED数码管显示。
红外信号的发射由另一块单片机和红外线LED完成,用红外万能接收头接收红外信号,可以实现对电机的控制进行红外遥控。
关键字:四相步进电机单片机功率放大红外遥控Controller for four phase step motorAbstract:The design adopts two microprocessor (DIP-40 encapsulation, AT89S52) of ATMEL company’ to control four phase step motor. After admeasured it, the pulse generated by microprocessor become the relevant four phase pulse. These pulses, which are magnified by driving circuit, are used to drive the four phase step motor. Regulating rotate speed and changing estate are used some keys. Pass scanning the keyboard to feed single back to microprocessor. The microprocessor makes the judgment and change the pulse frequent according to the feedback information. LED show different running estate. The infrared single is emitted by another microprocessor and infrared ray LED, using infrared incept module to accept the infrared signal. System can control motor with infrared telecontrol.Keyword:four phase step motor microprocessor power magnify infrared telecontrol目录前言 (3)1.系统设计 (3)1.1 功能介绍 (3)1.2总体设计方案 (3)1.2.1总体设计思路 (4)1.2.2方案论证与比较 (4)1.3电机的参数 (7)1.4系统组成 (7)2.单元电路设计 (7)2.1功率放大驱动电路方案设计 (7)2.2显示电路方案设计 (8)2.3单片机电源电路设计 (8)2.4红外发射电路设计 (8)3.软件设计 (9)3.1编程语言 (9)3.2软件实现方法 (9)3.2.1 双四拍正转 (9)3.2.2 双四拍反转 (10)3.2.3 单双八拍正转 (10)3.2.4 单双B八拍反转 (10)3.3 程序流程图如下所示: (11)3.4 三相步进电机程序清单 (11)4.结束语 (11)附录1 (12)附录2 (14)前言一般,电动机都是连续旋转,而步进电动机却是一步一步转动的,故称为步进电动机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课题:四相五线单4拍步进制电动机的正反转控制专业:机械电子工程
班级:2班
学号:20110259
姓名:周后银
指导教师:李立成
设计日期:2014.6.9~2014.6.20
成绩:
1概述
本实验旨在通过控制STC89C52芯片,实现对四相步进电机的转动控制。
具体功能主要是控制电机正转10s、反转10s,连续运行1分钟,并用1602液晶显示屏显示出来。
具体工作过程是:给系统上电后,按下启动开关,步进电机按照预先设
实验具体用到的仪器:STC89C52芯片、开关单元、四项步进电机、等硬件设备。
实验具体电路单元有:单片机最小系统、步进电机连接电路、开关连接电路、1602液晶显示屏显示电路。
2四相步进电机
2.1步进电机
步进电机是一种将电脉冲转化为角位移的执行机构。
电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
2.2步进电机的控制
1.换相顺序控制:通电换相这一过程称为脉冲分配。
2.控制步进电机的转向控制:如果给定工作方式正序换相通电,步进
电机正转,如果按反序通电换相,则电机就反转。
3.控制步进电机的速度控制:如果给步进电机发一个控制脉冲,它就转
一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
2.3步进电机的驱动模块
ABCD四相工作指示灯指示四相五线步进电机的工作状态
2.4步进电机的工作过程
开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持
较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图3.a、b、c所示:
步进电机工作时序波形图
对步进电机四个绕组依次实现如下方式的循环通电控制:
单四拍运行:正转A-B-C-D;反转D-C-B-A
双四拍运行:正转AB-BC-CD-DA;反转DC-CB-BA-AD
八拍运行:正转A-AB-B-BC-C-CD-D-DA
本实验使用的是单四拍循环控制,单四拍运行正转A-B-C-D;
反转D-C-B-A
3LCD1602液晶显示屏
引脚接口说明表
第1脚:VSS为地电源。
第2脚:VDD接5V正电源。
第3脚:VL为液晶显示器对比度调整端,接正电源时对比度最弱,接地时对比度最高,对比度过高时会产生“鬼影”,使用时可以通过一个10K的电位器调整对比度。
第4脚:RS为寄存器选择,高电平时选择数据寄存器、低电平时选择指令寄存器。
第5脚:R/W为读写信号线,高电平时进行读操作,低电平时进行写操作。
当RS 和R/W共同为低电平时可以写入指令或者显示地址,当RS为低电平R/W为高电平时可以读忙信号,当RS为高电平R/W为低电平时可以写入数据。
第6脚:E端为使能端,当E端由高电平跳变成低电平时,液晶模块执行命令。
第7~14脚:D0~D7为8位双向数据线。
第15脚:背光源正极。
第16脚:背光源负极。
4电路图设计
4.1 STC89C52概述
4.2 最小系统
单片机最小系统或者称为最小应用系统,就是用最少的元件组成的单片机可以工作的系统,对 52系列单片机来说,最小系统一般应该包括:单片机、复位电路、晶振电路。
4.3 复位电路
复位电路采用手动复位和上电自动复位。
上电自动复位:在单片机上电的瞬间,RC电路充电,由于电容上电电压不能突变,所以RST引脚出现高电平,RST引脚出现的高电平将会随着对电容C的充电过程而逐渐回落。
手动复位:当按下复位按钮时,RST出现高电平,实现复位。
4.4 拨码电路
拨码开关和P3口相连,拨动开关sw1、sw2、sw3、sw4来控制电机的启停、正反转、速度的加减。
4.5 电机驱动电路
将步进电机的A、B、C、D分别接到P1.0、P1.1、P1.2、P1.3管脚上
实物连接
5 程序设计
5.1 主程序框图
系统分为电机转动、电机正转、电机反转、电机加速、电机减速
和电机停止这几个部分组成,其主程序框图如图下所示
开始
初始化定义引脚数据等
调用定时器函数程序
声明定义延时函数
响应中断
声明定义定时器初始化函数
声明定义按键处理函数
调用按键子程序
等待
电机运转与停止 电机加速 电机减速
电机正转与反转
5.2 步进电机速度控制程序框图
正转部分: 送P1口不同的值,从而改变电机电源的相序,是电机正转,数值分别为0xf8,0xfc,0xf4,0xf6,0xf2,0xf3,0xf1,0xf9。
流程图如下
反转部分:送P1口不同的值,从而改变电机电源的相序,是电机反转,数值分别为0xf9,0xf1,0xf3,0xf2,0xf6,0xf4,0xfc,0xf8。
流程图如下
加速部分: 当电机处于正转或反转的时候,按下K2,调用加速程序,是电机每转动一部的延时时间变短,从而实现电机的加速。
减速部分: 当电机处于正转或反转的时候,按下K3,调用加速程序,是电机每转动一部的延时时间变长,从而实现电机的减速。
运行与停止: 按下K1键,系统默认是停止,拨动一次是运行,在拨动一次是停止,即是基数次运行,偶数次停止(一般不会拨动N 次,为了看
到现象,就拨动少数几次)
5.3 拨码开关输入程序框图
用于判断P3.1、P3.2、P3.3、P3.4,
6 总结
6.1心得
这次课程设计,历时多天,失败多次,不断总结失败的经验,从中取得进步。
经过这次课程设计,我明白了具体怎么来实现一个单片机的项目,熟悉了流程,获取信息的途径。
彻底的了解了单片机的用途。
6.2 收获
1、能够将理论知识与实践相结合,对理论的理解更透彻。
2、对单片机C语言编程,有了初步的了解,为以后的进一步学习打下
了基础。
3、增强了自己的团队意识,在以后的学习和工作中能够更好的与他人
合作。
【附录二】电路图。