matlabsisotools使用手册
MATLAB-simulink建模与sisotool校正word版本
M A T L A B-s i m u l i n k建模与s i s o t o o l校正
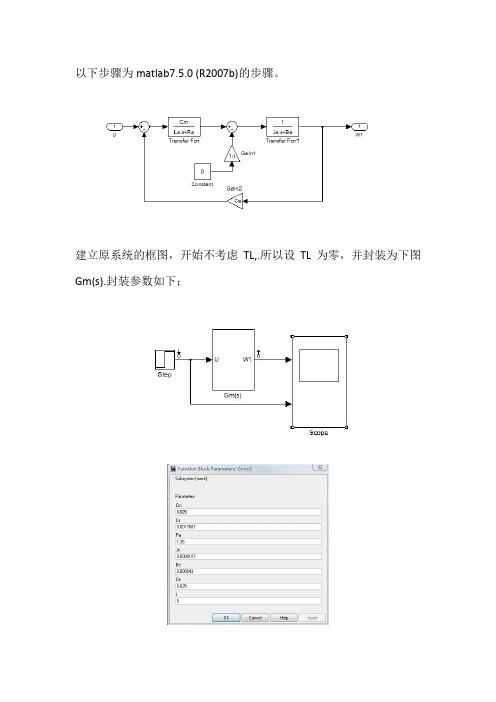
以下步骤为matlab7.5.0 (R2007b)的步骤。
建立原系统的框图,开始不考虑TL,.所以设TL为零,并封装为下图Gm(s).封装参数如下;
在子系统Gm(s)的两端通过选中连线,右击,设置线性输入输出点。
再TOOLS—control design—linear analysis。
浮现对话框:
单击标记处:
单击file——export,出现下面对话框:
选中model,单击export to workspace:
再在命令窗口:输入 sisotool,回车,出现下面对话框:
单击标记处,进入矫正传函参数的设置。
在单击file——import,出现下框:
单击标记处,再单击browse,进入
按标记操作,
再单击OK,进入:
这是没有矫正系统的零极点图,和BODE图。
单击analysis——response to step command,出现原系统单位反馈的step响应。
在原系统中任意加入一个实极点和实零点。
进入下面的对话款,设置相应的增益,零点和极点值
如图:
单位阶跃响应为:
此时。
Bode图为
在对上图,作如下操作,file——export:
作上图操作
可得矫正环节的:
其中校正环节方框图为:
总连线图:
最终仿真结果:。
MATLAB使用手册
MATLAB使用手册MATLAB基础1.1 MATLAB介绍MATLAB是一种科学计算软件。
MATLAB是Matrix Laboratory(矩阵实验室)的缩写,这是一种以矩阵为基础的交互式程序计算语言。
早期的MATLAB主要用于解决科学和工程的复杂数学计算问题。
由于它使用方便、输入便捷、运算高效、适应科技人员的思维方式,并且有绘图功能,有用户自行扩展的空间,因此特别受到用户的欢迎,使它成为在科技界广为使用的软件,也是国内外高校教学和科学研究的常用软件。
MATLAB由美国Mathworks公司于1984年开始推出,历经升级,到2001年已经有了6.0版,现在MATLAB 6.1、6.5、7.0版都已相继面世。
早期的MATLAB在DOS环境下运行,1990年推出了Windows版本。
1993年,Mathworks公司又推出了MATLAB的微机版,充分支持在MicrosoftWindows界面下的编程,它的功能越来越强大,在科技和工程界广为传播,是各种科学计算软件中使用频率最高的软件。
MATLAB比较易学,它只有一种数据类型(即64位双精度二进制),一种标准的输入输出语句,它用解释方式工作,不需要编译,一般入门后经过自学就可以掌握。
如果有不清楚的地方,可以通过它的帮助(help)和演示(demo)功能得到启示。
学习MATLAB的难点在于,它有大量函数,这些MATLAB函数仅基本部分就有700多个,其中常用的有200~300个,掌握和记忆起来都比较困难。
1993年出现了SIMULINK,这是基于框图的仿真平台,SIMULINK挂接在MATLAB 环境上,以MATLAB的强大计算功能为基础,以直观的模块框图进行仿真和计算。
SIMULINK提供了各种仿真工具,尤其是它不断扩展的、内容丰富的模块库,为系统的仿真提供了极大便利。
在SIMULINK平台上,拖拉和连接典型模块就可以绘制仿真对象的模型框图,并对模型进行仿真。
matlab-simulink 初级教程
Simulink仿真环境基础学习Simulink是面向框图的仿真软件。
7.1演示一个Simulink的简单程序【例7.1】创建一个正弦信号的仿真模型。
步骤如下:(1) 在MATLAB的命令窗口运行simulink命令,或单击工具栏中的图标,就可以打开Simulink模块库浏览器(Simulink Library Browser) 窗口,如图7.1所示。
(2) 单击工具栏上的图标或选择菜单“File ”——“New ”——“Model ”,新建一个名为“untitled ”的空白模型窗口。
(3) 在上图的右侧子模块窗口中,单击“Source ”子模块库前的“+”(或双击Source),或者直接在左侧模块和工具箱栏单击Simulink 下的Source 子模块库,便可看到各种输入源模块。
图7.1 Simulink(4) 用鼠标单击所需要的输入信号源模块“Sine Wave”(正弦信号),将其拖放到的空白模型窗口“untitled”,则“Sine Wave”模块就被添加到untitled窗口;也可以用鼠标选中“Sine Wave”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave”模块添加到untitled窗口,如图7.2所示。
图7.2 Simulink(5) 用同样的方法打开接收模块库“Sinks”,选择其中的“Scope”模块(示波器)拖放到“untitled”窗口中。
(6)在“untitled ”窗口中,用鼠标指向“Sine Wave ”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope ”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。
如图7.3所示。
(7) 开始仿真,单击“untitled ”模型窗口中“开始仿真”图标,或者选择菜单“Simulink ”——“Start ”,则仿真开始。
matlabsisotools使用手册
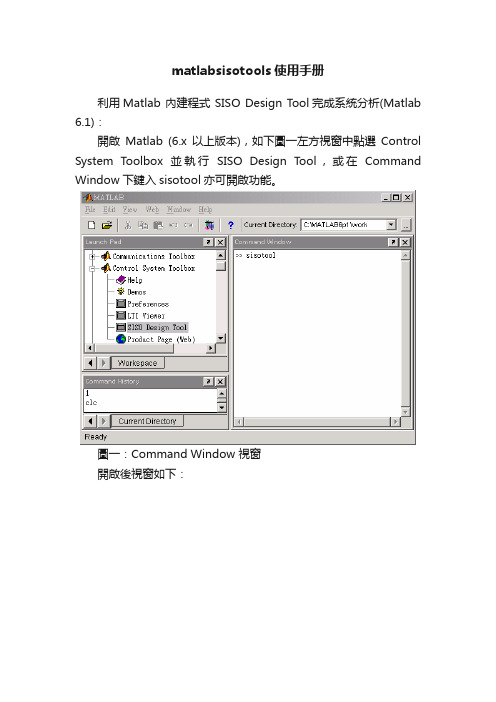
matlabsisotools使用手册利用Matlab 內建程式 SISO Design T ool完成系統分析(Matlab 6.1):開啟Matlab (6.x以上版本),如下圖一左方視窗中點選Control System Toolbox並執行SISO Design Tool,或在Command Window下鍵入sisotool亦可開啟功能。
圖一:Command Window 視窗開啟後視窗如下:圖二:SISO Design Tool視窗File選項:為使程式部分功能可行運作,首先必須在Command Window下輸入系統之轉移函數。
例如:Command Window下建入G=tf([250],[1 25 0]),輸入完畢後再由SISO Design Tool視窗中選取File→Import便可開啟視窗如圖二:圖三:系統資料輸入視窗在視窗中可看見已定義之轉移函數G,檔案來源另可選擇MAT-file、Simulink。
點選箭頭符號即可將其載入G(Plant)。
其中H(Sensor)、F(Prefilter)、C(Compensator)也可利用相同的方式載入,若無載入參數,則程式將定為1。
讀者也可點選圖中Other來切換不同方塊圖。
全部選擇完畢後按OK建確認,便可顯示出系統圖形如圖四。
123456789圖四:給定系統資料後之SISO Design T ool視窗Edit選項:1. Undo:取消上一次動作。
2. Redo:回複上一次動作。
3.以Root Locus為例:(其餘請自行類推),如圖五所示。
圖五:Edit選項示意圖相對選項如下:Add Pole/Zero:增加(共軛)極點或(共軛)零點至原圖,相同。
點選後可利用滑鼠在圖形中選擇之位置增加極零點。
Delet Pole/Zero:消除原圖之(共軛)極點或(共軛)同。
Design Constraints:設計限制要求。
如安定時間(Settling Time)、超越量(Percent Overshoot)、阻尼比(Damping Ratio)、自然頻率 (Natural Frequency)。
Exp0_Matlab-Simulink_Introduction使用说明
余兆棠 南台科技大學電子系
教育部資通訊科技人才培育先導型計畫
通訊系統模擬 實習零
1
目的
本課程 - 「通訊系統模擬」將使用 MATLAB/Simulink 進行模 擬,其中基礎篇以Simulink內建模組方塊建構模擬系統平台之 方式進行模擬,模擬結果皆以圖解方式說明物理意義;進階篇 以MATLAB撰寫程式碼之方式進行模擬,除了以數值或圖表結 果驗證解說相關理論,也可以做數據資料之定量分析。 本實習主要簡單介紹 MATLAB/Simulink 軟體與其環境,並說 明使用 ( 操作 ) 方式,方便使用者熟悉 MATLAB/Simulink 軟體 / 環境/使用方法後進行本課程規劃之實習的模擬與分析。
指令視窗 (Command Window)
教育部資通訊科技人才培育先導型計畫
實習零 MATLAB/Simulink使用說明
7
MATLAB指令的輸入與執行
MATLAB 程式碼運算採用逐行指令編譯與執行之方式進行。 在「指令視窗」中的提示符號「>>」可以直接輸入指令。例如輸入 9+10,按下Enter鍵,隨即編譯與執行並顯示結果 。
教育部資通訊科技人才培育先導型計畫
4 5 6 7 8 9
>>a (2:3 , 1:2) ,表示取出矩陣中第 二列至第三列裡,第一行與第二行 之元素。
實習零 MATLAB/Simulink使用說明 11
基本繪圖程式範例
繪圖函數plot(x, y)會利用所提供的資料製作出一個連線圖。
指定X軸、Y軸以及線的規格
Example: >> Tstep=0.001; >> t=(0:Tstep:1); >> amp=2; >> freq=10; >> y=amp*sin(2*pi*freq*t); >> plot(t,y);
(13)Matlabsimulink使用篇
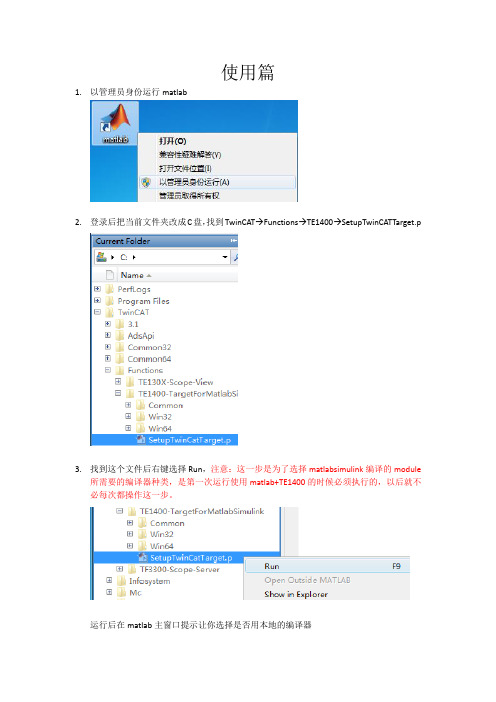
使用篇1.以管理员身份运行matlab2.登录后把当前文件夹改成C盘,找到TwinCAT→Functions→TE1400→SetupTwinCATTarget.p3.找到这个文件后右键选择Run,注意:这一步是为了选择matlabsimulink编译的module所需要的编译器种类,是第一次运行使用matlab+TE1400的时候必须执行的,以后就不必每次都操作这一步。
运行后在matlab主窗口提示让你选择是否用本地的编译器因为本地有VS2010的编译器,所以选择y后敲回车随后matlab找到本地有两种编译器,一个是matlab本体的lcc-win32 C2.4.1,另一个是VS2010,选择VS2010所代表的数字,输入2敲回车最后让matlab让你确认编译器的选择,输入y敲回车提示以下信息说明编译器选择完成4.点击工具栏中simulink图标5.弹出simulink编辑界面后,点击工具栏中的打开模型6.找到案例模型TempContrTest.mdl,点击打开7.本次案例模型是一个简单的温度控制External Setpoint是设定温度Feedback Temp是当前温度CoolerON是开关量输出8.打开simulation菜单栏,选择configuration parameters进行参数设定(1)进入参数设定后,选择右边的树形栏中的Solver,把其中的Type改成Fixed-step(2)之后选择树形栏中的Code Generation,把其中的System target file改成TwinCAT.tlc 点击Browse可以进行选择(3)继续选择树形栏中的Tc Module,在Publish module和Publish binaries for platform “TwinCAT RealTime(x86)”前打勾(4)最后选择树形栏中的Tc Advanced,把Task assignment改成Default在Add to cyclic caller,Variable cycle time,Export block digram以及Export block diagram debug information前打勾(5)以上操作完成后点击左下角的Apply(6)选择树形栏中的Code Generation,把Generate code only勾选后点击Generate code,随后matlab就开始把这个模型通过TE1400生成TC3所识别的Module了(7)回到matlab主窗口,等看到以下提示说明Module生成完成(8)我们来看下生成的Module会在什么位置可以发现在TwinCAT/3.1/CustomConfig/Modules路径下会生成名字和案例模型名字一样的文件夹TempContrTest打开可以发现里面其实主要是.tmc文件是TC3所需要的,其他都是一些描述文件,所以可以把.tmc文件拷贝出来,给一些没有Matlab的电脑上用9.打开TC3,并新建项目10.把名称改成英文,例如matlabsimulink,点击确认11.打开SYSTEM,右键TcCOM Objects添加新项12.TC3会自动找到之前生成的.tmc文件,选中后点击OK进行添加13.添加好后我们可以发现TcCOM Objects下出现matlab生成的Module,并且3个变量出现在IO位置,方便和PLC程序或者硬件IO进行变量连接14.右键Tasks添加新项名字可以改成matlab,点击OK添加新的Task15.因为我需要实施做温度计算,所以可以这个Task的优先级提高,修改成1,周期用默认的10ms即可16.双击TcCOM Objects下面的Object1(TempContrTest)Depend On改成Manual Config,并把Task分配成之前创建的名为“matlab”的Task17.右键PLC添加新项18.把名称修改为英文,例如test19.编辑一段模拟程序,模拟温度的升降20.程序写好后右键test Project,选择生成开始编译程序21.编译好后在test Instance自动生成3个变量22.接下来要做的就是把PLC中3个变量和matlab中三个变量链接起来Switch→CoolerONSP→External SetpointPV Feedback Temp23.变量链接完成后开始下传配置和程序,选择菜单栏TwinCAT,点击Activate Configuration弹出窗口点击确定提示切换到运行模式点击确定观察右下角图标是否编程绿色运行状态弹出窗口点击确定提示切换到运行模式点击确定观察右下角图标是否编程绿色运行状态24.打开PLC菜单,选择“登录到”把程序在线25.打开PLC菜单,选择“启动”把程序运行26.观察程序,看到成功利用matlab温度算法运行程序27.打开Object1(TempContrTest),选择Block Diagram也可以同时观察Matlab温度算法实时状态注:上图中可以看到由一个红色字提示说是非商业的,虽然TE1400插件装上了,但用的还是7天试用版,所以对于试用版有一些限制,查询information system可以看到如下:TC3中Scope View简单使用在之前的基础上来看下TC3下Scope View如何使用,装好TC3后Scope View会自动集成在TC3中1.首先右键“解决方案”选择添加,点击新建项目2.选择TwinCAT Measurement中的Measurement Scope Project,名称改成英文,例如tempcontrol,点击确定3.右键Axis,选择Target Browser4.打开小电脑图标下的Port_851(851),点击MAIN5.把MAIN程序中PV和SP分别添加到同一个坐标上6.保证程序在运行后,点击工具栏中的Record开始记录两个变量7.随后就可以观察到当前PV和SP的示波图下图中绿色是PV,蓝色是SP。
matlab-基本使用方法

指令 all(a)
any(a)
find logical
Matlab的逻辑函数
含义
测试矩阵所有元素是否非零。 (当向量a的元素全非0时,结果是1; 否则 为0,矩阵针对每一列) 测试任意非零值。 (只要a中有非0元素,结果就是1; 否则结 果是0) 查找非零元素的值和下标
将数值转变成逻辑值
例7: a=[1 2 0 4] b=all(a) a=[1 2; 3 4] c=all(a) (向量和矩阵) d=any(a)
矩阵输入的方法
1. 直接输入矩阵。 2. 通过语句生成矩阵。 3. 由矩阵生成函数产生特殊矩阵。 4. 用户自己编写M文件产生矩阵。 5. 通过导入外部数据文件生成矩阵。
1 直接输入矩阵
(1) 矩阵中元素应用方括号括住。 (2) 每行内的元素间用逗号或空格隔开; (3) 行与行之间用分号或回车键隔开。 (4) 元素可以是数值或表达式。
比较在两数组相同位置上的元素间进行,因此比较 结果将与被比数组同维。
例5: a=[1 3 ;7 8] b=2; c1=(a>=b) c2=a(a>=b) d=[6 5;2 3] e=a<d
维数不同时的反例 f=[1 7 2 ; 4 5 6] m=a<f
逻辑运算
Matlab的逻辑操作符主要有:
指令
关系运算和逻辑运算
在程序流控制和逻辑推理中,需要对一类是非 问题作出“是真,是假”的回答。所以设计了关系 和 逻辑操作和一些相关函数。
Matlab的规定: (1) 关系和逻辑表达式中,任何非0数都被看作
是“逻辑真”,而0被认为是“逻辑假”。 (2) 关系和逻辑表达式的计算结果,是由0和1组
成的“逻辑数组”。 (3) 逻辑数组是一种特殊的数值数组。与“数值
matlab中的sisotool在数字式移相全桥中的应用
matlab中的sisotool在数字式移相全桥中的应用摘要:数字式移相全桥是一种常见的功率电子拓扑结构,其应用广泛。
本文介绍了数字式移相全桥的基本原理,重点阐述了sisotool 在数字式移相全桥中的应用,包括系统建模、控制器设计、性能分析等方面。
通过实验验证,sisotool能够有效地提高数字式移相全桥的控制性能,实现更加精确的输出电压。
关键词:数字式移相全桥;sisotool;控制器设计;性能分析一、引言数字式移相全桥是一种常见的功率电子拓扑结构,其应用广泛。
数字式移相全桥通过控制开关管的开关时间,实现电源电压的变换,并通过输出滤波器将电压转换为所需的直流电压。
在数字式移相全桥的控制中,控制器的设计是至关重要的。
传统的控制器设计方法需要进行大量的计算和实验,效率较低。
本文介绍了sisotool在数字式移相全桥中的应用,可以快速完成系统建模、控制器设计和性能分析等任务,提高数字式移相全桥的控制性能。
二、数字式移相全桥的基本原理数字式移相全桥是一种基于开关管的电源电压变换结构,其基本原理如图1所示。
数字式移相全桥由四个开关管、一个负载和一个输出滤波器组成。
开关管通过控制开关时间,实现电源电压的变换。
输出滤波器将电压转换为所需的直流电压。
数字式移相全桥的工作原理如下:(1)当开关管1和3导通,开关管2和4断开时,电源电压V1通过开关管1和3传递到输出滤波器,输出电压为Vout1。
(2)当开关管2和4导通,开关管1和3断开时,电源电压V1通过开关管2和4传递到输出滤波器,输出电压为Vout2。
(3)当开关管1和4导通,开关管2和3断开时,电源电压V2通过开关管1和4传递到输出滤波器,输出电压为Vout3。
(4)当开关管2和3导通,开关管1和4断开时,电源电压V2通过开关管2和3传递到输出滤波器,输出电压为Vout4。
通过控制开关管的开关时间,可以实现输出电压的变换,从而实现数字式移相全桥的控制。
三、sisotool在数字式移相全桥中的应用sisotool是MATLAB中的一种工具箱,可以用于系统建模、控制器设计和性能分析等任务。
matlab使用说明书

控制系统的模拟试验与MATLAB 仿真1 MA TLAB 简介MATLAB 是Mathworks 公司开发的一种集数值计算、符号计算和图形可视化三大基本功能于一体的功能强大、操作简单的优秀工程计算应用软件。
MATLAB 不仅可以处理代数问题和数值分析问题,而且还具有强大的图形处理及仿真模拟等功能。
从而能够很好的帮助工程师及科学家解决实际的技术问题。
MATLAB 的含义是矩阵实验室(Matrix Laboratory ),最初主要用于方便矩阵的存取,其基本元素是无需定义维数的矩阵。
经过十几年的扩充和完善,现已发展成为包含大量实用工具箱(Toolbox )的综合应用软件,不仅成为线性代数课程的标准工具,而且适合具有不同专业研究方向及工程应用需求的用户使用。
MATLAB 最重要的特点是易于扩展。
它允许用户自行建立完成指定功能的扩展MATLAB 函数(称为M 文件),从而构成适合于其它领域的工具箱,大大扩展了MATLAB 的应用范围。
目前,MATLAB 已成为国际控制界最流行的软件,控制界很多学者将自己擅长的CAD 方法用MATLAB 加以实现,出现了大量的MATLAB 配套工具箱,如控制系统工具箱(control systems toolbox ),系统识别工具箱(system identification toolbox ),鲁棒控制工具箱(robust control toolbox ),信号处理工具箱(signal processing toolbox )以及仿真环境SIMULINK 等。
(1) MATLAB 的安装本节将讨论操作系统为Microsoft Windows 环境下安装MATLAB6的过程。
将MATLAB6的安装盘放入光驱,系统将自动运行auto-run.bat 文件,进行安装;也可以执行安装盘内的setup.exe 文件启动MATLAB 的安装程序。
启动安装程序后,屏幕将显示安装MATLAB 的初始界面,根据Windows 安装程序的常识,不断单击[Next],输入正确的安装信息,具体操作过程如下:输入正确的用户注册信息码;选择接收软件公司的协议; 输入用户名和公司名;选择MATLAB 组件(Toolbox ); 选择软件安装路径和目录;单击[Next]按钮进入正式的安装界面。
matlab-sisotool讲解电子教案
"Design
分别设置设置“ Setting Time”为0.05 “Percent Overshoot”为5。
SISOTOOL工具的使用方法
调整控制器的增益
设计控制器,使得闭环极点放在所需的位置,为了满足 调整时间和超调量的要求,系统的闭环主导极点应位于 淡粗线所围成的区域内,在靠近虚轴的复数开环极点的 左侧加入一对共轭复零点,同时在淡粗线所围成的区域 内的附近添加一对共轭复极点。拖动加入的零点和极点 来调整控制器的零点和极点的位置,拖动任一方块来调 整增益的值,使得系统新的闭环主导极点落在淡粗线所 围成的区域内。
SISOTOOL工具的使用方法
例子2
Nc
C(s)
I zc Gd (s) z
g Gg (s) G1(s)
Na
Ga (s)
N
G2 (s)
图2-1 俯仰通道稳定控制系统方框图
I 0.18
C(s)20s0(0s0(s50)223)
设计总结
利用SISOTOOL工具箱方便地设计出经典控制系统,但是 控制器零极点的选择仍需要不断试凑,直到基本满足性 能要求。因此在设计过程中,必须注意以下规律:
matlab-sisotool讲解
SISOTOOL工具的使用方法
在Matlab命令窗口中输
有一电液伺服机构的传递函数为
40000000 G(s)
s(s250)(s240s90000)
用上述的电液伺服机构可以构成闭环位置伺服系统,如图1 所示,设计控制器C使该系统的单位阶跃响应满足下列条件
此课件下载可自行编辑修改,仅供参考! 感谢您的支持,我们努力做得更好!谢谢
有意识地在系统中加入适当的零点,以抵消对动态过程 影响较大的不利极点,使系统的动态过程获得改善。
matlab-simulink中文帮助手册
北京电子科技学院毕业设计外文资料翻译系别电子信息工程系专业电子信息工程班级0911学生姓名崔琦导师姓名周玉坤起止时间2013年2月至2013年6月北京电子科技学院毕业设计外文翻译20091111崔琦2目录simulink工作原理
北京电子科技学院
毕业设计外文资料翻译
系 别 电子信息工程系
专 业 电子信息工程
用状态工作执行状态 ................................................................................................... 7 连续时间系统 ............................................................................................................... 7 离散时间系统 ............................................................................................................... 8 混合系统建模 ............................................................................................................... 8 模块参数 ..............................................................................................................................9 可调的参数 ..........................................................................................................................9 模块采样时间..................................................................................................................... 10 自定义模块 ........................................................................................................................11 系统和子系统..................................................................................................................... 11 虚拟子系统................................................................................................................. 11 非虚拟子系统............................................................................................................. 11 动态系统仿真 ............................................................................................................................14 模型编译 ............................................................................................................................14 链接阶段 ............................................................................................................................14 方法执行清单 ............................................................................................................. 15 模块优先级 ................................................................................................................. 15 仿真代数回路..................................................................................................................... 15 回路迭代..................................................................................................................... 16 求解 ....................................................................................................................................17 固定步长的解与可变步长的解 ................................................................................. 17
MATLABsimulink建模与sisotool校正.doc
以下步骤为matlab7.5.0 (R2007b)的步骤。
建立原系统的框图,开始不考虑TL,.所以设TL为零,并封装为下图Gm(s).封装参数如下;
在子系统Gm(s)的两端通过选中连线,右击,设置线性输入输出点。
再TOOLS—control design—linear analysis。
浮现对话框:
单击标记处:
单击file——export,出现下面对话框:
选中model,单击export to workspace:
再在命令窗口:输入sisotool,回车,出现下面对话框:
单击标记处,进入矫正传函参数的设置。
在单击file——import,出现下框:
单击标记处,再单击browse,进入
按标记操作,
再单击OK,进入:
这是没有矫正系统的零极点图,和BODE图。
单击analysis——response to step command,出现原系统单位反馈的step响应。
matlab sisotool讲解
“Percent Overshoot”为5。
SISOTOOL工具的使用方法得闭环极点放在所需的位置,为了满足 调整时间和超调量的要求,系统的闭环主导极点应位于 淡粗线所围成的区域内,在靠近虚轴的复数开环极点的 左侧加入一对共轭复零点,同时在淡粗线所围成的区域 内的附近添加一对共轭复极点。拖动加入的零点和极点 来调整控制器的零点和极点的位置,拖动任一方块来调 整增益的值,使得系统新的闭环主导极点落在淡粗线所 围成的区域内。
SISOTOOL工具的使用方法
在Matlab命令窗口中输入
>>sisotool 工具箱即可启用
例子1
有一电液伺服机构的传递函数为
40000000 G(s) s( s 250)( s 2 40s 90000)
用上述的电液伺服机构可以构成闭环位置伺服系统,如图1 所示,设计控制器C使该系统的单位阶跃响应满足下列条件 1、调整时间 ts 0.05s 2、超调量 M P 5%
MATLAB SISOTOOL 工具箱简介
SISOTOOL工具箱简介
Matlab的Control System工具箱提供了单输入单输 出系统补偿器的设计工具 Sisotool 。 Sisotool 是 Single Input Single Output Toolbox的缩写,它是 Matlab 的 Control System 工具箱的子工具箱。 Sisotool 工具箱能够利用根轨迹图或开环系统的 Bode图,通过修改线性系统零点、极点以及增益 等传统设计方法实现系统控制器的设计。在设计 控制器时还可以设计相关的约束条件,例如阻尼 比、自然频率、超调量、幅值裕度和相位裕度等, 设计后还可以显示校正后闭环系统的阶跃响应和 闭环系统的频率特性等。
MATLAB 软件使用简介(转载)
MATLAB 软件使用简介默认分类2007-03-15 21:26:49 阅读4255 评论9 字号:大中小订阅MATL A B 软件使用简介MATL A B 是一个功能强大的常用数学软件, 它不但可以解决数学中的数值计算问题, 还可以解决符号演算问题, 并且能够方便地绘出各种函数图形。
MA TL AB自1984年由美国的MathWorks公司推向市场以来,历经十几年的发展和竞争,现已成为国际最优秀的科技应用软件之一。
这里主要以适用于Windows操作系统的MA TL AB5.3版本向读者介绍MATL AB的使用命令和内容。
一、MATL A B 的进入/退出MATL A B 的安装成功后, 系统会在Windows【开始】菜单的【程序】子菜单中加入启动MATL AB命令的图标, 用鼠标单击它就可以启动MATL A B系统,见图2.1。
图2.1 启动MATL A B启动MA TL AB后, 屏幕上出现MATL A B命令窗口:图2.2 MA TL AB命令窗口图2.2的空白区域是MATL A B 的工作区(命令输入区), 在此可输入和执行命令。
退出MA TL AB系统像关闭Word文件一样, 只要用鼠标点击MA TL AB系统集成界面右上角的关闭按钮即可。
二、MATL A B 操作的注意事项l 在MATL A B工作区输入MATL A B命令后, 还须按下Enter键, MA TL AB才能执行你输入的MA TL AB命令, 否则MA TL AB不执行你的命令。
l MATL A B 是区分字母大小写的。
l 一般,每输入一个命令并按下Enter键, 计算机就会显示此次输入的执行结果。
(以下用↙表示回车)。
如果用户不想计算机显示此次输入的结果,只要在所输入命令的后面再加上一个分号“;”即可以达到目的。
如:x= 2 + 3 ↙x=5x = 2 + 3 ; ↙不显示结果5l 在MATL A B工作区如果一个表达式一行写不下,可以用在此行结尾处键入三个英文句号的方法达到换行的目的。
Matlab的使用方法及步骤详解

Matlab的使用方法及步骤详解一、Matlab简介Matlab是一种非常流行的科学计算软件,其全称为Matrix Laboratory(矩阵实验室)。
Matlab具有强大的数学计算和数据分析能力,广泛应用于工程、科学、经济等领域。
本文将详细介绍Matlab的使用方法及步骤。
二、安装与启动Matlab1. 下载与安装首先,访问MathWorks官方网站,找到适用于您操作系统的Matlab版本,并下载安装程序。
安装程序将引导您进行安装,按照提示完成即可。
2. 启动Matlab安装完成后,您可以在开始菜单或桌面上找到Matlab的启动图标。
点击启动图标,Matlab将打开并显示初始界面。
三、Matlab基本操作1. 工作区与编辑器Matlab的界面主要由工作区和编辑器组成。
工作区显示变量及其值,可用于查看和操作数据。
编辑器则用于编写和编辑Matlab脚本、函数等。
2. 脚本与命令窗口Matlab提供了两种主要的运行方式:脚本和命令窗口。
脚本是一系列命令的集合,可以一次性执行,适用于较复杂的计算任务。
命令窗口则可逐行输入命令并立即执行,用于快速测试和调试。
3. 基本算术和数学运算Matlab支持各种基本算术和数学运算,如加减乘除、幂运算、三角函数等。
可以直接在命令窗口输入表达式并执行。
四、数据操作与处理1. 数组的创建与操作在Matlab中,数组是最基本的数据结构之一。
可以使用多种方法创建数组,例如手动输入、加载外部文件、使用特定函数等。
一旦创建,可以对数组进行各种操作,如索引、切片、拼接等。
2. 矩阵运算Matlab对矩阵运算提供了强大的支持。
可以进行矩阵加减乘除、转置、求逆等运算。
矩阵运算在解决线性方程组、最小二乘拟合等问题时非常有用。
3. 数据可视化Matlab提供了丰富而强大的数据可视化功能。
使用plot、scatter、histogram等函数可以绘制各种类型的图表。
还可以对图表进行格式设置、添加标签、调整坐标轴等。
matlab-sisotool讲解资料讲解
要正确配置闭环主导极点的位置。把系统的设计要求表 示成希望极点的区域。通过加入适当的零点和极点,使 得系统的闭环主导极点落在希望的区域。
如要求系统快速性好,则闭环极点应远离虚轴;若要系 统平稳性好,则闭环负数极点对应设置在于负实轴夹角 较小的等阻尼比线上
SISOTOOL工具的使用方法
在Matlab命令窗口中输入 >>sisotool 工具箱即可启用
例子1
有一电液伺服机构的传递函数为
40000000 G(s)
s(s250)(s240s90000)
用上述的电液伺服机构可以构成闭环位置伺服系统,如图1 所示,设计控制器C使该系统的单位阶跃响应满足下列条件
MATLAB SISOTOOL 工具箱简介
SISOTOOL工具箱简介
Matlab的Control System工具箱提供了单输入单输 出系统补偿器的设计工具Sisotool。Sisotool是 Single Input Single Output Toolbox的缩写,它是 Matlab的Control System工具箱的子工具箱。 Sisotool工具箱能够利用根轨迹图或开环系统的 Bode图,通过修改线性系统零点、极点以及增益 等传统设计方法实现系统控制器的设计。在设计 控制器时还可以设计相关的约束条件,例如阻尼 比、自然频率、超调量、幅值裕度和相位裕度等, 设计后还可以显示校正后闭环系统的阶跃响应和 闭环系统的频率特性等。
"Design
分别设置设置“ Setting Time”为0.05 “Percent Overshoot”为5。
SISOTOOL工具的使用方法
MATLAB如何使用-教程-初步入门大全资料

运算 数学表达式
加 a+b
减
a-b
乘 a×b
除 a÷ b
幂 a^b
MATLAB运算符
+ *
/(右除)或\(左除)
^
MATLAB表达式
a+b a-b a*b a/b或b\a a^b
示例
1+2 5-3 2*3
6/2或2\6 2^3
指出:右除相当于通常的除法。
22
七、MATLAB的变量与函数
1、变量 变量就是在程序的运行过程中,其数值可以变化的量
MATLAB是交互式的语言,输入命令即给出运算结 果。而命令窗口则是MATLAB的主要交互窗口,用 于输入和编辑命令行等信息,显示结果(图形除 外)。
当命令窗口中出现提示符“>>”时,表示MATLAB已 经准备好,可以输入命令、变量或运行函数。提示 符总是位于行首。
在每个指令行输入后要按回车键,才能使指令被 MATLAB执行。
28
矩阵的创建(续)
1、直接输入法-在命令窗口按规则输入方式创建矩阵
例1.在命令窗口创建简单的数值矩阵。
>>A=[1 3 2;3 1 0;2 1 5] 回车后在命令窗口显示如下结果
A=
132
310
215 例2.在命令窗口创建带运算表达式的矩阵,不显示结果。
>>y=[sin(pi/3),cos(pi/6);log(20),exp(2)]; 输入“y”回车,在命令窗口显示出来。
(3)在MATLAB安装目录\MATLAB6p5中双击 MATLAB快捷方式。
(4)在MATLAB安装目录\MATLAB6p5\bin\win32 中双击MATLAB.exe图标。
MATLAB的基本使用教程详解

MATLAB的基本使用教程详解MATLAB(Matrix Laboratory,矩阵实验室)是一种用于数值计算和可视化的编程环境。
它提供了强大的数值计算功能、丰富的数学函数库、快捷的可视化工具和易于使用的编程语言。
以下是关于MATLAB基本使用的一些教程:1. 安装和启动MATLAB:- 访问MATLAB官方网站下载并安装MATLAB。
- 安装完成后,在桌面上找到MATLAB图标并点击启动。
2. 创建一个新的MATLAB文件:- 在MATLAB界面,点击“新建”按钮,选择“新建图形”,或者使用快捷键Ctrl+N。
3. 基本的MATLAB命令:- 在命令窗口中输入命令并按Enter键执行。
例如,输入`1+2`并按Enter 键,将显示结果`3`。
- 可以使用括号对表达式进行组包。
例如,输入`(1+2)*3`并按Enter键,将显示结果`9`。
- 在MATLAB中,可以使用逗号将多个命令分开执行。
例如,输入`a = 1,b = 2,c = a+b`,将依次执行这三个命令并显示结果。
4. 变量和数组:- 在MATLAB中,可以使用`a = 1`的形式创建一个变量a并将其值设为1。
- 数组是一种可以存储多个相同类型数据的数据结构。
例如,可以使用`A = [1,2,3;4,5,6]`创建一个包含两行三列的数组。
5. 数学函数:- MATLAB提供了丰富的数学函数库,例如可以使用`sin(pi/2)`计算sin(π/2)的值。
- 可以同时使用多个函数对同一组输入参数进行操作。
例如,可以使用`c = a*b; d = log(a/b); e = sin(a)+cos(b)`同时对变量a、b进行多种操作。
6. 控制结构:- 可以使用`if`、`else`和`end`关键字创建条件语句。
例如,输入`if a > b, a = b; end`将使a的值等于b的值(如果a大于b)。
- 可以使用`for`循环遍历数组或向量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
利用Matlab 內建程式 SISO Design Tool完成系統分析(Matlab 6.1):開啟Matlab (6.x以上版本),如下圖一左方視窗中點選Control System Toolbox並執行SISO Design Tool,或在Command Window下鍵入sisotool亦可開啟功能。
圖一:Command Window 視窗開啟後視窗如下:圖二:SISO Design Tool視窗File選項:為使程式部分功能可行運作,首先必須在Command Window下輸入系統之轉移函數。
例如:Command Window下建入G=tf([250],[1 25 0]),輸入完畢後再由SISO Design Tool視窗中選取File→Import便可開啟視窗如圖二:圖三:系統資料輸入視窗在視窗中可看見已定義之轉移函數G,檔案來源另可選擇MAT-file、Simulink。
點選箭頭符號即可將其載入G(Plant)。
其中H(Sensor)、F(Prefilter)、C(Compensator)也可利用相同的方式載入,若無載入參數,則程式將定為1。
讀者也可點選圖中Other來切換不同方塊圖。
全部選擇完畢後按OK建確認,便可顯示出系統圖形如圖四。
123456789圖四:給定系統資料後之SISO Design Tool視窗Edit選項:1. Undo:取消上一次動作。
2. Redo:回複上一次動作。
3.以Root Locus為例:(其餘請自行類推),如圖五所示。
圖五:Edit選項示意圖相對選項如下:Add Pole/Zero:增加(共軛)極點或(共軛)零點至原圖,相同。
點選後可利用滑鼠在圖形中選擇之位置增加極零點。
Delet Pole/Zero:消除原圖之(共軛)極點或(共軛)同。
Design Constraints:設計限制要求。
如安定時間(Settling Time)、超越量(Percent Overshoot)、阻尼比(Damping Ratio)、自然頻率 (Natural Frequency)。
Grid:將圖形加上格線。
Zoom:Property:編輯圖形。
如座標名稱、圖形顯示範圍、圖線顏色等。
4. SISO Tool Preference:圖六Unit:選擇所示單位。
Style:座標內容調整、字型調整。
Option:補償器顯示型態。
Line Color:元件線條顏色更改。
另外,讀者也可不需藉由Edit選項來做圖形之修改以及設計,以圖三中之根軌跡圖做為說明,其方法如下:1.於根軌跡圖示中敲擊滑鼠左鍵兩次:如圖七所示。
Label:圖形以及座標軸名稱。
Limit:座標軸範圍。
Option:加入圖形格線以及顯示阻尼資訊。
*注意:不同的性能響應圖其三選項內之功能也不相同。
圖七:圖形編輯視窗2.於根軌跡圖示中敲擊滑鼠右鍵一次:圖八:擊點系統圖形示意圖若在每一圖形中擊點滑鼠右鍵,亦可得類似於圖五之選項,唯獨新增了一選項:Edit Compensator。
Edit Compensator:補償器(控制器)編輯。
可藉由輸入控制器欲增加之極零點位置以及增益值,或可另行選擇以阻尼常數及自然頻率之型態來做控制器的編輯。
讀者也可藉由圖四中之選項Compensators(稍後將介紹)來對控制器作編輯。
圖四中顯示了系統之根軌跡圖、波德圖。
讀者可選擇View勾選顯示不同的系統分析圖。
View選項:1. Root Locus:顯示根軌跡圖。
2. Open-Loop Bode:顯示開迴路波德圖。
3. Open-Loop Nichols:顯示開迴路尼可士圖。
4. Prefilter Bode:顯示前置濾波器之波德圖。
5. System Data:可顯示及更改檔名,若點選Show Transfer Function即可顯示系統Plant以及Sensor的轉移函數,如圖九。
圖九:系統資料視窗6. Closed-Loop Poles:顯示極點位置。
讀者可先行開啟此視窗,拖曳圖三根軌跡上之極點,視窗便會顯示此時極點大小(Pole Value)以及阻尼比(Damping)、頻率(Frequency)。
如圖十:圖十:極點位置視窗7. Design History:顯示日期以及所執行過的動作,圖十一。
圖十一:設計過程紀錄Analysis選項:(Matlab6.5才有此選項)其功能與Matlab6.1版中之Tool選項相同。
Compensators選項:1. Format:與Edit選項中SISO Tool Preference功能相同。
2. Edit:可選擇對C(Compensator)或F(Prefilter)做編輯。
如圖十二:圖十二:補償器設計視窗3.Store:儲存補償器名稱,如圖十三。
圖十三:儲存補償器名稱4.Retrieve:顯示補償器列表,如圖十四。
圖十四:已設計補償器列表5.Clear:消除已設計之補償器。
對於補償器之編輯,讀者也可直接於圖三中之Current Compensator(如下圖十五)敲擊滑鼠左鍵一次即可。
圖十五:系統補償器顯示框更改系統為正回授或系統型式,可直接於圖三中之方塊圖(如下圖)中點選+/-;FS符號即可,如圖十六。
圖十六:系統方塊圖形式Tool選項:顯示系統個別元件(間)之響應圖,其包含了:1. Loop Response:(a)Closed-Loop Step(b)Control Signal Step(c)Closed-Loop Bode(d)Compensator Bode(e)Open-Loop Bode(f)Other若點選Other,可得系統個別元件(間)之選單,如圖十七。
圖十七:系統元件(間)之選單在此選單中可勾選欲觀察之元件,勾選完畢後再由Change to:選擇響應圖形類別,選擇完畢後按Ok鍵確認即可顯示圖形。
以圖十七(顯示波德圖)為例,得到圖形如圖十八:圖十八:波德圖在圖十八中不同顏色線條代表不同元件(間)之波德圖,按滑鼠右鍵並選擇System可確認顏色所對應之元件。
同樣地,按滑鼠右鍵選擇Plot Type可更改圖示型態,另外若按住滑鼠左鍵不放拖曳圖形上之點,可以獲得不同點所獲得的資訊。
欲儲存此圖檔可在圖五中選擇File→Print to Figure即可獲得另一原圖,再此原圖中選擇File→Save即可。
2. Countinuous /Discrete Conversions:將系統由連續轉為離散(初學者可略過),如圖十九:圖十九:連續離散轉換視窗3. Draw Simulink Diagram:畫出系統之方塊圖,如圖二十:圖二十:Simulink 系統方塊圖若需將系統設計之變數回傳至Command Window作分析,則選擇File→Export將資料與Workspace做連結即可。
所有項目均設定完成後,在圖三(SISO Design Tool視窗)中選擇File→Save Session,讀取檔案選擇File→Load Session完成SISO Design Tool之操作。
**補充說明**Matlab 內建程式 SISO Design Tool系統分析版本差異:數值解方面略有差異。
讀者可藉由稍後之例題來測試Matlab6.1版與Matlab6.5版中數值解不同之處(本程式操作說明是使用Matlab6.1版)。
利用SISO Design Tool 達成控制器設計以及分析其系統響應 Example :設計規格PM=50oControllerPlant假設系統之開迴路轉移函數:)0025.001.0()01.0(15)(2+++=s s s s s G 步驟一:Command Window 下建入 G=tf([15 0.15],[1 0.01 0.0025 0])步驟二:在File 中選擇import 可看見已定義之轉移函數G 。
點選箭頭即可將其載入G(Plant)。
其中Sensor 、Prefilter 、Compensator 預設為1。
選擇完畢後按OK 建確認,如圖二十一所示:圖二十一:給定系統資料後之SISO Design Tool 視窗步驟三:在軌跡圖上敲擊滑鼠左鍵兩次,進入Property Editor調整座標軸大小範圍以利觀察。
如圖二十二。
圖二十二:座標軸調整視窗讀者可在根軌跡圖形上利用滑鼠左鍵按住不放,拖曳閉迴路極點,波德圖也將隨著系統不同極點來做改變,因此可觀察系統之G.M、P.M、Freq以及穩定性。
≅,如圖二十三所示:當C(s)約為0.008(可在視窗中鍵入)時,GM=∞;PM0此時系統處於零界穩定狀態,因此需設計一控制器。
圖二十三:座標軸調整後之SISO Design Tool視窗此時根軌跡之位置如圖二十四:極點為兩共軛虛根(圖中無法顯示)以及一負實根。
圖二十四:極點位置視窗步驟四:觀察系統尼可士圖點選View,選擇顯示尼可士圖,如圖二十五。
並在圖中敲擊滑鼠右鍵一次,選擇Grid。
圖中曲線也可藉由滑鼠拖曳來觀察不同響應。
GM:InfPM:0.0341o(未達題目需求)Stable loop圖二十五:系統尼可士圖步驟四:觀察系統步階響應以及奈氏圖(其餘圖形請自行類推)點選圖四中Tool→Loop Response→Closed-Loop Step→Open-Loop Nyquist圖二十六:步階響應及奈氏圖於圖中敲擊滑鼠左鍵兩次或右鍵一次可對圖形進行編輯,也可使用滑鼠拖曳功能。
在拖曳訊息視窗中敲擊滑鼠右鍵一次,可對此視窗做調整,如下圖二十七。
圖二十七:奈氏圖訊息視窗步驟五:加入控制器44.0058.00042.0)(++=s s s C於Command Window 下鍵入C=zpk([-0.058],[-0.44],0.0042),此為相位領先補償器。
在File 中import 已定義之補償器C 。
或由圖四中Compensators →Edit 選擇對C(Compensator)設計,如圖二十七。
圖二十八:項位領先補償器重複步驟一 ~ 步驟五,觀察系統響應如圖二十九~三十一。
圖二十九:加入控制器後之SISO Design Tool 視窗圖三十:加入控制器後之尼可士圖(PM=50o)圖三十一:加入控制器後之步階響應及奈氏圖。