智能桥梁检测车臂架电液比例控制的研究
工程机械应用电液比例技术效果分析
1 前言
电液 比例技术是新时期研发的工程机械 的传动控制技 术, 该技 术具有 性价 比比较 高、 使用 比较方便、 抗干扰 能力 比较 强与试用 面比较广 等优 点。 此外, 在控制技术 与液压 传动 技术发展的过程 中, 工程 机械中 的电液 比例 技术有着至关重要的作用。只是电液伺服技术起始 阶段主要用 于航 空, 随 之发展过程 中, 才逐渐应用在重要的工业设备 中。
码只可以应用一次。 每台接 收机必须要对相同的地址码发射信号作出相 关 反应 , 确保其他无线 同频信 号不会影响到接收 的装 置, 使其他安全措施 应 用 的安全系统可靠性与安全性得 以充分 发挥 。 3 . 2电液 比例多路 阀中压力补偿 的技术和负载传感 为提高工程机械控制的精度、 节约能源 、 最大 限度 的降低油温 , 经常会 同时使用 多个元件 同步运转 , 且运动过程 中不 能互相干扰, 目前大部分 先 进工程机械基本都是应用压力补偿和 负载传感 的技术。 压力补偿和负载传
的装 置 , 主要用来驱动荷载。 2 . 2检 测 反 馈 的 元件 些 闭环 控 制 系 统 中 应 该 增 设检 测 反 馈 的元 件 , 主 要用 来 检 测 中 间变 量 与被控量实 际值 ,获取系统反馈 的信 号。通常检测元件又 叫转换器 , 例
一
如: 机液转换与机 电转换。 为检测反馈元件属于 比例 阀中的元件, 主要用来
着 负 载 压 力 升 高 而加 大 ,确 保 泵 输 出 流 量和 系 统数 据 需要 的 流量 一致 , 减
电控器 也叫做 比例的放大器 ,但 由于比例阀中 电磁铁控制 电流比较 大、 偏差控制的电流 比较小 , 无法推动电磁 铁正常的工作, 而且偏差的信号 形状与类型也难 以满 足电磁铁高性 能的控制 要求, 因此 , 要应 用电控器加
高空作业车电液比例调平系统仿真研究的开题报告

高空作业车电液比例调平系统仿真研究的开题报告
1. 研究背景和意义
高空作业车广泛应用于现代建筑、桥梁、电力等工程领域,可以完成一些人工难以完成的高空作业任务。
而高空作业需要严格控制车辆的平稳性和安全性,否则会对
操作人员和周围环境构成安全隐患。
因此,高空作业车电液比例调平系统的研究和开
发具有重要意义。
本研究拟对高空作业车电液比例调平系统进行仿真研究,探究其实现原理和优化方案,为高空作业车的进一步优化提供理论依据和技术支持。
2. 研究内容和方法
本研究主要采用以下方法:
(1)对高空作业车电液比例调平系统进行系统分析和建模,确定关键参数和工
作原理。
(2)采用ANSYS Workbench等软件对高空作业车电液比例调平系统进行三维
建模和有限元仿真,模拟系统在不同工况下的运动状态,探究系统的平稳性和安全性。
(3)通过MATLAB和Simulink等软件对高空作业车电液比例调平系统进行动态仿真,模拟系统在开发过程中的动态响应和变化过程,为优化方案提供理论支持。
3. 预期成果和意义
本研究的预期成果包括:
(1)高空作业车电液比例调平系统的系统模型和仿真模型,确定关键参数和工
作原理。
(2)分析系统的平稳性和安全性,探究系统的优化方案。
(3)为高空作业车的进一步改进和提升提供理论依据和技术支持。
本研究的意义在于提高高空作业车的安全性和稳定性,帮助企业更好地完成高空作业任务,为现代建筑、桥梁、电力等工程领域的发展贡献力量。
智能化桥梁检测车关键技术研究
智能化桥梁检测车关键技术研究摘要:随着经济的发展,桥梁的建设越来越多,其在经济发展中的作用越来越大。
作为交通设施的重要组成部分,桥梁的建设质量与人们的生活息息相关,对于保证人们的生命和财产安全有着不可替代的作用。
要保证桥梁的质量,就要对桥梁进行必要的检测,桥梁检测车是桥梁检测中的重要设施,为工作人员提供了安全稳定的平台,提高检测效率。
因此,本文通过对智能化桥梁检车的关键技术进行研究分析,以更好的促进桥梁检测的发展。
关键词:智能化;桥梁检测车;技术引言随着交通建设的不断发展,我国的路网结构不断地完善,桥梁的数量也在增加。
但是由于各方面的原因,使得桥梁的质量不能得到很好的保证,甚至造成不安全的事故,造成经济损失。
一般情况下,桥梁不能根据年限和表面的特征进行报废拆除,需要进行科学的诊断以及检测,用科学的数据来指导和制定对桥梁的决策。
因此,桥梁设施的检测与维护已成为当务之急。
一、桥梁检测车(一)吊篮式桥检车吊篮式桥检车也叫臂架式桥检车(如图1、图2),其结构小巧,能够通过有线、无线操作,使用灵活方便,有时候还可以做为高空作业车使用,价格(相对桁架式桥检车)低。
一般是采用一级伸缩、二级回转、三级变幅机构,形成三维空间、6个自由度的空间运动体系,可以安全、快捷地将工作人员和设备送到桥下幅度允许的任意位置。
桥下水平作业范围为0~16.37m,桥下垂直作业范围为0~20m,地面上升高度为10~11m,第一回转转动角度为0~90°,第二回转转动角度为0~225°。
在桥下为点阵式检测,但作业平台是装在臂架顶端的一个吊斗,面积较小,只可容纳2名人员作业,载重一般有200~300kg,作业效率相对较低。
(二)桁架式桥检车桁架式桥梁检测车采用面积大、稳定的通道式工作平台。
和吊篮式工作平台(一般采用二级伸缩、二级回转、二级变幅机构,形成了三维空间,六个自由度的空间运动体系)相比,这种通道式的工作平台的承载力能够得到有效的提高,并且工作平台与桥梁接触面的增大,方便了工作人员在桥面的行走。
车辆电液主动悬架智能控制研究

悬 架 系统 对 由路 面输入 引起 的振 动 能有 效抑 制 ,车 身加 速 度 、 悬架动 挠 度 和轮 胎 动 载荷 与 被 动 悬
架 相 比 分 剐 降 低 2% 5% 、2 %- 4 0 5 5 - %、0  ̄ 4 4 % 5 %, 车 辆 行 驶 平 顺 性 和 操 纵 稳 定 性 得 到 很 大 改 善 。验
0 引言
悬 架 系统 是车 辆 的重 要组 成部 分 。车 辆行 驶 在路 面
悬 架 动 挠 度 和 轮 胎 动 载 荷 为 悬 架 系 统 评 价 指 标 ,依 据 尽
ห้องสมุดไป่ตู้
量 降低 评 价 指标 和尽 量 少 的消 耗 能量 的原 则 ,建 立 最优 控 制性 能 指标 函数 ,通过 离 线运 算 得 到最 优 控制 律 。搭 建 电液 主动悬 架 系统 控 制仿 真 模 型 ,通 过 数 值仿 真 验 证 最 优控 制 器 的性能 。
l mp ov d t e rd m o t e sa e ceha di .i uain sv rf d t rom a c ft ep o sd c ntolr y i r e h i es ohn s nd v hil n l ngSm lt o i ei e hepef r n eo r po e o r l . i h e K e r s cies s e so y wo d :a tv u p n in; ee to—h rui evo a t t r o i a o r l lcr yd a l sr cuao ; pt l c nto c m
t 5 , 5 t 4 , % t 4 r d to n a c l r to ,d na c de e t nd d na c l d c O5 % 2 % o4 % O o 5 % e uc i n i c e e a n y mi f c on a y mi oa ompa e o t e p si e s s e so i l i r d t h a sv u p n i n,a p r nt p ae -
桥梁检测车作业装置电液控制系统

桥梁检测车作业装置电液控制系统
何晓光
【期刊名称】《江苏建材》
【年(卷),期】2002(000)003
【摘要】本文介绍集机械、电液比例控制等高技术于一体的桥梁检测车的基本结构,详细分析其作业装置液压控制系统和有线电气遥控操纵装置。
【总页数】3页(P39-41)
【作者】何晓光
【作者单位】广东冠粤路桥有限公司,广州市,510000
【正文语种】中文
【中图分类】TU7
【相关文献】
1.连续管作业机张紧力电液控制系统的设计及应用 [J], 刘远波;周晓军;杜永军;张强;吴卫周
2.高空作业车电液比例调平控制系统的设计与仿真 [J], 俞浙青;孟嘉乐;徐龙稳;毛国新
3.智能桥梁检测车臂架电液比例控制的研究 [J], 王凡; 吴百海; 肖体兵
4.油菜旋耕移栽联合作业机穴距电液比例控制系统研究 [J], 汤庆;吴崇友;吴俊;秦超;蒋兰;王刚
5.载装作业装置控制系统的机电液联合仿真 [J], 赵峰;尚建忠
因版权原因,仅展示原文概要,查看原文内容请购买。
电液比例控制技术的研究

1 电液比例控制技术的概况
1.1 电液比例技术的发展背景及特点
Abstract:This paper uses the electro-hydraulic proportional control technology to propertionally modulate hydraulic pressure parame- ter by inpuffing electric signal.The USG ot the technology has the characteristics of simple control elements,high control precision. strong resistibil时of pollution and middle price.SO it gets people’S rife recognition.The actualities and development trend of the tech- nology at home and abroad are introduced in this paper.Through analysis and research,the technology is applicable to the raise-rise
1.2电液比例系统及其组成
电液比例控制的核心是比例阀。电子放大器根据一个 输入电信号电压值的大小转换成相应的电流信号,这个电 流信号作为输入量被送入比例电磁铁,电磁铁将此电流转 换为作用于滑阀芯/锥阀芯上的力,以克服弹簧的弹力。电 流增大,输出的力相应增大,该力或位移又作为输入量加给 液压阀,后者产生一个与前者成比例的流量或压力。电磁 铁断电后,复佗弹簧使阀芯返回中位。通过这样的转换,输 入电信号的变化,不但可以控制执行器和工作部件的运动 方向,而且可对其作用力和运动速度进行无级的调节,使系 统的输出量与给定值保持在允许的范围之内,与此同时输
常用物理量代号及法定计量单位的标注

常用物理量代号及法定计量单位的标注2008年7月王凡等:智能桥梁检测车臂架电液比例控制的研究凰:二二二二二i,r1一l图6活塞标上行时的仿真模型图7v>0时的阶跃相应输入信号有良好的跟踪性.从以上分析可以看出,该控制方法和结构是可行的,系统的响应时间和控制精度完全能够满足工作臂摆幅机构运动控制的要求.参考文献[1]周士昌.液压系统设计图集啤北京:机械工业出版社.2003.7昌昌.0010OOg00080007000e0006fIJ一.一一一...I一..一一一?-I一一?一一一-J一一一一一一一?●IItlI…--一一…?--一一'一一'一一一一'一一一'一'''●II……...一一一..I一.一一.一一I一.一一一一-J一??一一一一III一一●II--一一一?一一一?--一一一一一-一--■'一一'一'●II,r.一..一.一.......一.一....一一.一.一一...:::..一一一...;.一.一.一....一...一...一一..:::O昌?'屯23-0.4-0.60010.之'口.30.4't/s图9v<0时的斜坡响应【2】韩波,王庆丰,路甬祥.电液比例位置控制系统的控制结构研究[J1.机床与液压,1997,No.1:7-10【3]肖体兵.深海采矿装置智能升沉补偿系统的研究.广州:广东工业大学博士学位论文,2004.6[4]4王沫然编着.Simulink建模与动态仿真【M】.北京:电子工业出版社,2002 ResearchonProportionalControlfortheWorkingSwingArmofIntelligentBridgeDetectionV ehicleW ANGFangWUBai-haiXIAOTi-bing常用物理量代号及法定计量单位的标注物理量名称代号法定计量单位物理量名称代号法定计量单位(英文小写斜体)(英文正体)(英文大写斜体)(英文正体)长度Zcm.m面积Acm2.m2直径dmm.Cm体积L,cm3时间tS.mln力,N,kN速度m/s力矩MN?m压力pPa.MPa功率PW.kW质量mkg热量QJ流量gL/rain温度℃L。
电液比例位置控制系统的新型PID控制算法研究
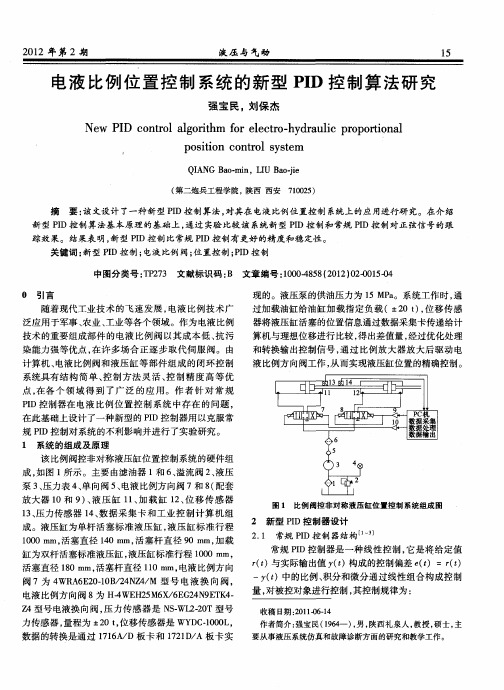
过加载油缸给油缸加载指定负载(4 0t , - ) 位移传感 2
器将 液压 缸 活塞 的位置 信息通 过数 据采 集卡传 递 给计
算机与理想位移进行比较 , 得出差值量 , 经过优化处理 和转换输出控制信号 , 通过 比例放大器放大后驱动电 液 比例方 向阀工作 , 而实现 液压缸 位置 的精确 控制 。 从
中 图分类 号 :P7 文 献标 识码 : 文章 编 号 :004 5 (0 2 0 -050 T23 B 10 -88 2 1 )20 1-4
0 引言
现 的 。液 压泵 的供 油压 力为 1 P 。 系统工 作 时 , 5M a 通
随着 现代 工业 技 术 的飞 速 发展 , 液 比例 技 术 广 电 泛应 用 于军 事 、 业 、 农 工业 等各 个领 域 。作 为 电液 比例 技术 的重要组 成 部件 的 电液 比例 阀 以 其成 本 低 、 污 抗 染 能力 强等优 点 , 许 多 场 合 正 逐 步取 代 伺 服 阀。 由 在 计算 机 、 电液 比例 阀和液 压 缸 等 部 件 组 成 的 闭环 控 制
2 1 常规 PD控 制器 结构 . I
常规 PD控制 器是 一 种 线性 控 制 , 是 将 给定 值 I 它 rt ()与实 际输 出值 Y t ()构成 的控制 偏差 et =rt () ()
一
活塞 直径 10mm, 8 活塞 杆直 径 10m 电液 比例方 向 1 m, 阀 7为 4 A E 01B 2 N A M 型 号 电液 换 向 阀 , WR 6 2 —0 /4 Z/ 电液 比例方 向阀 8为 H4WE 2 M x 6 G 4 9 T 4 H5 6/E2NEK-
数 据 的转换 是通 过 1 lA D板 卡 和 12 / 板 卡 实 76/ 71 A D
电液比例控制系统分析与设计

电液比例控制系统分析与设计1.输入信号接收与处理:电液比例控制系统通常采用模拟输入信号,如电压、电流等。
因此,需要设计电路对输入信号进行放大、滤波和隔离等处理,以满足系统的要求。
2.控制逻辑设计:根据实际应用需求,设计相应的控制逻辑。
常见的控制方式有PID控制、模糊控制等。
根据被控对象的特性和要求,选择合适的控制方式,并进行调参及优化。
3.输出信号处理:将控制逻辑输出信号转换为适合驱动液压元件的信号形式。
通常采用A/D转换器将模拟信号转换为数字信号,并输出给液压部分。
1.液压能量转换与控制:液压部分负责将电气信号转换为液压能量,并控制液压元件的工作状态。
常见的液压元件有液压泵、液压缸、液控单元等。
通过液压阀的开关控制,来实现液压能量的转换和流动的控制。
2.液压系统参数设计:根据系统需求,确定液压泵的最大工作压力、液压缸的位移要求、流量要求等。
根据这些要求,选用合适的液压元件,并进行相应的参数设计与计算。
3.液压系统的安全性与稳定性:液压系统工作中容易产生高压、高温等危险因素,因此需要对液压系统进行安全性设计。
同时,为了保证系统的稳定性,需要对液压阀的开关速度、压力等进行合理控制。
1.机械传动装置设计:根据实际运动要求,设计机械传动装置,包括连接方式、传动比、轴承选型等,以满足系统对力、速度和位置的要求。
2.机械结构设计:根据机械运动要求,设计相应的机械结构,包括液压缸的安装方式、支撑结构设计等,以保证机械执行部分的可靠性和稳定性。
3.机械部件的选用与配合设计:根据实际负载和工作条件,选用合适的机械部件,并进行合理的配合设计,以确保机械执行部分的准确性和稳定性。
总结:电液比例控制系统的分析与设计是一个复杂而庞大的工程。
需要考虑多个方面的因素,如控制逻辑设计、液压部分的能量转换和控制、机械执行部分的设计等。
只有综合考虑这些因素,才能设计出稳定、高效的电液比例控制系统。
桥梁车辆智能检测系统技术方案

桥梁车辆智能检测系统技术方案一、引言桥梁是连接两个地理位置的重要交通设施,其安全可靠性对于交通的畅通和公民的安全至关重要。
而桥梁车辆智能检测系统技术方案的出现,满足了监测桥梁负荷和车辆轴重等诸多需求,为桥梁安全做出了重大的贡献。
本文将从技术方案的角度,探讨桥梁车辆智能检测系统的实现。
二、桥梁车辆智能检测系统概述桥梁车辆智能检测系统是一种通过车载传感器对行驶车辆负荷进行逐级监测的技术工具,所监测的数据包括车辆类型,车速、径向力、轮距、轮胎、轮压、车重及车重与桥梁荷载的比值等信息。
并通过数据处理系统,对检测数据进行实时的处理、比对和分析,从而达到对于过载车辆驶入桥梁的提醒、监测和记录等功能,确保桥梁的安全运营。
三、技术方案1.车载传感器车载传感器是桥梁车辆智能检测系统的关键组件,它可以对车辆负荷进行逐级监测,数据精度高,取值范围广,可实现对车辆负荷及轴重的高精度监测。
车载传感器的实现,需要采用高精度、多功能和可靠性高的传感器,以满足对车辆轴重等诸多参数的监测需求。
2.数据采集、处理与传输系统数据采集、处理与传输系统是桥梁车辆智能检测系统的核心部分,主要负责检测到的数据采集、处理和传输。
传输方式上可以采用现有的以太网、GPRS、3G、4G等技术,确保数据传输的质量和速度,从而实现对车辆负荷监测数据的高效采集、处理与传输。
3.数据中心与分析系统数据中心与分析系统为桥梁车辆智能检测系统提供了数据存储、数据分析、数据转换、数据呈现和报警功能等方面的支持。
数据存储一般采用云端方式,以实现对数据的高可靠性和安全性。
而数据分析系统则主要用于对数据的实时处理、比对和分析,以实现对过载车辆的及时警告。
四、应用案例桥梁车辆智能检测系统应用极其广泛,被广泛应用于桥梁建设、修缮、安全监管等领域。
以某省公路局为例,在县境内建设了一个智能桥梁安全监测系统,系统主要包括车载传感器、数据采集传输系统和数据分析处理系统。
整个系统通过云平台对数据进行存储、分析和处理,能够可靠地监测桥梁上车辆的轴重和负荷,对于超载车辆及时报警和追踪。
电液比例控制后桥主动转向系统 标准

电液比例控制后桥主动转向系统标准1. 引言1.1 研究背景随着汽车工业的不断发展,人们对汽车性能和安全性能的要求也越来越高。
而且,随着城市交通流量的增加和道路拥堵的加剧,车辆操控性和转向灵活性也成为了人们关注的焦点。
传统的汽车转向系统主要依靠驾驶员的操纵来实现,但在某些特定的情况下,驾驶员的反应速度和操作技能可能无法满足对车辆操控性的要求。
开发一种能够提高车辆操控性和安全性能的转向系统成为了一个迫切的需求。
电液比例控制技术和桥主动转向系统的结合,可以有效地提高车辆的转向响应速度和稳定性,进一步提升车辆的操控性和安全性能。
探索电液比例控制后桥主动转向系统的设计和应用具有重要的实用价值和研究意义。
通过对这一领域的深入研究和探索,可以为汽车工业的发展和车辆安全性能的提升提供有力的支持。
1.2 研究意义通过研究电液比例控制后桥主动转向系统,可以实现车辆在转弯过程中后桥的主动转向,从而降低车辆的侧倾倾角,提高车辆的稳定性和安全性。
该系统还能够提高车辆的操控性能,使驾驶者更加轻松自如地驾驶车辆,提升驾驶体验。
研究电液比例控制后桥主动转向系统具有重要的意义,可以为汽车制造行业带来新的技术突破,推动汽车操控性能的提升,满足用户对驾驶体验需求的不断增长。
2. 正文2.1 电液比例控制技术电液比例控制技术是一种通过电子和液压联合控制的先进技术,广泛应用于汽车、机械设备等领域。
它基于电子控制单元(ECU)和液压执行单元(HCU)的协同工作,通过精确控制液压阀的开启和关闭来实现对液压系统的精准控制。
电液比例控制技术的优势在于其快速响应、精准控制和高效能力。
通过调节电子控制单元发送的电压信号,可以实现流量、压力等参数的精确控制,从而提高液压系统的工作效率和性能。
在汽车行业中,电液比例控制技术被广泛应用于制动系统、转向系统等关键部件中。
通过电液比例控制技术,汽车可以实现更加灵活、稳定的转向控制,提高行驶安全性和舒适性。
电液比例控制技术的发展为各个领域带来了更高效、更精准的控制方式,是现代控制领域的重要突破之一。
电液比例的原理及应用论文

电液比例的原理及应用1. 引言电液比例技术是指利用电信号控制液压执行元件的工作,通过调整电压来改变液压工作室的工作效果,从而实现对液压系统的精确控制。
这种技术由于其高精度、快速响应和可编程性等特点,在各个领域有着广泛的应用。
本文将介绍电液比例技术的基本原理,以及它在工业自动化、机械运动控制和航空航天等领域的应用。
2. 电液比例的基本原理电液比例技术是通过电液比例阀来实现的。
电液比例阀是一种特殊的液压调节阀,它可以根据输入的电压信号来调节液压元件的工作状态。
具体来说,电液比例阀通过改变液压油的流通面积来实现液压元件的运动控制。
在电液比例阀中,通过一个电磁线圈来控制阀芯的位置,从而改变内部通道的开启和关闭程度,进而改变液压油的流通量。
3. 电液比例在工业自动化中的应用电液比例技术在工业自动化领域有着广泛的应用。
它可以用于控制各种液压元件,如液压缸、液压马达等,实现对工业设备的精确控制。
同时,电液比例技术还可以配合传感器和自动控制系统,实现对工业过程参数的实时监测和自动调节。
这种技术不仅提高了生产效率,还提高了产品质量。
在工业自动化中,电液比例技术可以应用于以下方面: - 机床自动控制:通过电液比例技术可以实现机床的自动控制,提高加工精度和生产效率。
- 输送线控制:电液比例技术可以应用于输送线的自动控制,实现对物料的精确输送。
- 机械臂控制:电液比例技术可以用于机械臂的控制,实现对工件的精确抓取和放置。
- 液压振动控制:电液比例技术可以应用于液压振动控制系统,实现对振动频率和振幅的精确控制。
4. 电液比例在机械运动控制中的应用电液比例技术在机械运动控制领域也有着广泛的应用。
在机械运动控制中,通过电液比例技术可以实现对机械传动系统的精确控制,提高机械运动的精度和稳定性。
同时,电液比例技术还可以实现对机械运动过程中的速度、位置和力的控制。
在机械运动控制中,电液比例技术可以应用于以下方面:- 机械传动系统控制:通过电液比例技术可以实现机械传动系统的精确控制,提高运动的精度和平稳性。
电液比例控制

电液比例控制技术概述电液比例控制技术概述电液比例控制技术概述液压传动与控制技术作为动力传动与控制技术的重要组成部分,对工业和国防领域的技术进步和发展起到了很大的推动作用,是现代机械工程的基本要素和工程控制的关键技术之一。
其具有易于实现直线运动、功率质量之比大、动态响应快等优点[1] 。
随着现代科学技术与工业的发展,对液压传动系统的灵敏性、稳定性、可靠性和寿命提出了愈来愈高的要求。
电液比例控制系统具有抗干扰能力强、可靠性高、结构紧凑、价格低、与计算机连接方便、控制灵活、低速平稳性能好等诸多优点,在液压系统中的应用具有重要意义。
因此,将电液比例控制技术应用于液压传动系统中,不仅可以简化液压控制系统,还可以提高液压系统的控制水平,更好的满足工业要求。
科学技术的发展、工业发展步伐加快,以及日益严格的高自动化、节能、远距离传输和可持续发展的社会和工程需要,使得电气控制技术在液压系统中的应用日趋广泛。
可编程控制器(简称PLC 或PC)作为电气控制技术中的一项新技术,经过30 多年的发展,已形成完整的工业产品系列。
它以微处理器为核心,有机地将微型计算机技术、自动化技术及通信技术融为一体。
PLC 在比例液压系统中的应用,方便和简化了工业控制,提高了控制的自动化、集成化、一体化,符合工业发展的潮流。
习惯上,人们把使用比例控制组件(含比例阀、比例控制泵及比例放大器)的液压系统称为电液比例控制系统。
严格地说,比例控制是实现组件或系统的被控制量(输出)与控制量(输入或指令)之间线性关系的技术手段,依靠这一手段要保证输出量的大小按确定的比例随着输入量的变化而变化。
电液比例阀是以传统的工业用液压控制阀为基础,采用模拟式电气-机械转换装置将电信号转换为位移信号,连续地控制液压系统中工作介质的压力、方向或流量的一种液压组件。
电液比例阀工作时,阀内电气-机械转换装置根据输入的电压信号产生相应动作,使工作阀阀芯产生位移,阀口尺寸发生改变并以此完成与输入电压成比例的压力、流量输出。
多自由度超长臂小型智能桥梁检测车臂架结构的探讨
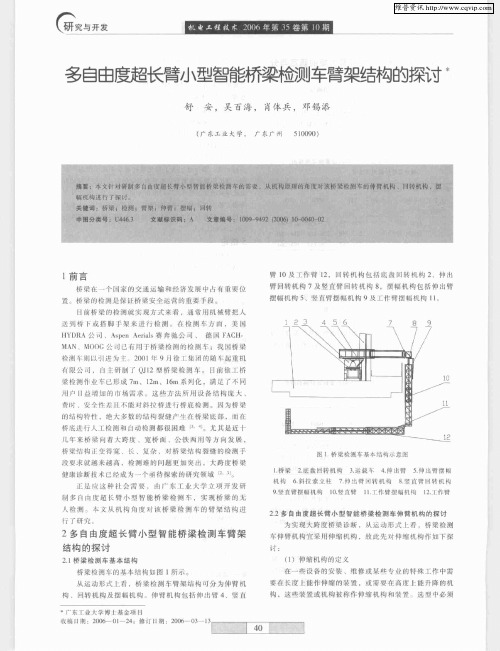
桥 _ 住 - 圊 家 的 交 通 运 输 和 经 济 发展 - 占 胄 重 要 位 馔 个 p 置 桥 梁 的 检 测 足 保 正 桥 梁 安 全 运 营 的 重要 手段 。 目 前桥 粱 的椅 测就 实 现 方 式 来 看 ,通 常 用 机 械 臂 把 人 进 到 桥 戒 措 脚 手 架 米 进 行 检 测 在 检 测 车 面 ,美 国 H R 公 司 、A pn A r l 赛 奔 驰 公 可 、 德 F C YD A s e e a is A H M N,M O 公 司 已 有 用 于 桥 粱 榆 删 的检 测 乍 ; 我 国 桥 粱 A O G 榆 删 车 则 以引 进 为 丰 201 9片 徐 ] 集 闭 的 随 1起 重 机 0 年 = = 币 限 公 捌 , 自 主 研 制 rO l 型 桥 梁 检 测 车 。 H前 徐 工 桥 『 J2 梁 检测 作 业 1已 形 成 7 m、 lm 、I m 系 列 化 , 满 足 r不 同 2 6 r L益 增 加 的 l 需 求 。这 些 方 法 所 H 设 备 结 构 鹿 大 、 11 场 j
在一些 设备的安装 、维修或某些 争业的特殊 T 中需 作 要在 民度 Il 作伸缩的装置 ,或需要在 高度 l能升降的机 -t _g :
掏 .这 些 装 置 或 机 构 被 称 作 伸 缩 机 构 和 装 置 造 型 中 必 须
r尔T业 大学 博士基金项 目 收 稿 r 期:2 ( — 0卜一 4 I 0I 6 2 ;修 玎H期 :2 o —0 一 】 广 —— —可———下———一 O6 3 3 _
维普资讯
舒
安 ,吴 百海 , 肖体 兵 , 邓锡 添
( 东 工业 大学 . 广 东广 州 广 5O9 ) l0 0
桥梁检测车机械臂监控系统设计与研究
桥梁检测车机械臂监控系统设计与研究摘要:随着我国现代化建设进程的不断深入,交通运输行业也实现了较大程度的发展,特别是城市高架桥建设数量的增加,使得人们对桥梁的安全性问题予以了高度的重视,特别是在坍塌事故频繁出现的现阶段,要求必须要加大对桥梁检测车的研究力度,保证桥梁检测工作能够实现高效的开展。
为此,本文针对桥梁检测车机械臂监控系统,对其设计与研究工作进行了分析和探讨。
关键词:桥梁检测车;机械臂;监控系统;设计随着经济水平的提高,交通运输压力的日益加剧,使得人们对于桥梁的需求量也在不断的增加,继而推动了桥梁检测工作的开展。
桥梁检测车是对道路桥梁进行检测的专用车辆,对于桥梁检测的准确性、桥梁使用的可靠性以及人们出行的安全性等方面具有十分重要的作用,特别是当机械臂的旋转速度超过设定范围值的时候,侧翻力矩的过大会导致车辆侧翻,造成十分严重的后果。
因此,必须要加强对桥梁检测车机械臂监控系统的研发,切实发挥出桥梁检测车的实际作用。
1桥梁检测车机械臂的数学建模一般来说,桥梁检测车机械臂的数学建模有两个关键的环节,其一,是关节的定位,其二,是动力学的分析,关节的定位主要是计算桥梁检测车机械臂关节的空间坐标,而动力学的分析主要对依据机械臂的数据来对机械臂的惯性力以及危险等级等进行判定。
1.1关节定位通常情况下,桥梁检测车的机械臂都是由工作平台和一——三臂共同组成的,其中的工作平台运用了自动调平技术,因此可以将其模型转换成为三关节的模型,构建出如下图1所示的空间模型,其中的O1为定坐标系,O2、3、4均为动坐标系,L则代表了机械臂的长度;通过复合坐标之间的相互变换和平移量就可以计算出桥梁检测车机械臂关节的空间坐标。
图1:桥梁检测车机械臂的空间建模示意图1.2动力学分析要保证桥梁检测车机械臂监控系统的可靠性,其设计的难点在于对机械臂的侧翻力矩进行准确的计算,而利用静电的动力学分析理论来对桥梁检测车进行整体化的分析,获得机械臂在旋转过程中所可能产生的侧翻力矩和惯性力。
智能化桥梁检测车关键技术研究
2011年5期(总第77期)197作者简介:李军(1973-),男,山东东营人,高级工程师,主要研究方向为路桥试验检测。
智能化桥梁检测车关键技术研究李军1,李淑慧2(1.山东省公路桥梁检测中心,山东东营257091;2.西安邮电学院,陕西西安710121)摘要:我国具有自主知识产权的桥梁检测车辆在国内尚处于空白,为此有必要自主研制开发桥梁检测车的整套制造技术。
本文主要对整车设计的关键性技术进行研究,解决了整车稳定性的技术难题,优化了液压系统设计,运用PLC 作为整车的控制器,提升了整车控制系统的水平,并安装了自动图像检测系统,使得桥梁检测车具备智能化检测功能。
该桥梁检测车已经投入使用,并成功运用于桥梁检测中,取得良好的检测效果。
关键词:桥梁检测车;关键技术;桁架式中图分类号:U446.3文献标识码:B桥梁检测车(Bridge inspecting Vehicle )是指装备有桥梁检测仪器和工作台,用于桥梁的病害维修和预防性检查作业的专用车辆。
桥梁检测车应该具有对交通影响最小,效率高、机动性好,工作平稳安全等优点。
近年来,也有国内企业开发桁架式桥梁检测车,但由于起步晚,与国外产品尚有一定距离,国内目前还主要依靠进口,而进口的桁架式桥梁检测车还未采用可视化检测技术。
因此,自主开发具有可视化和人工检测两者功能的桁架式桥梁检测车不仅可填补国内空白,赶超世界先进水平,而且有其非常重要的实用价值。
本文对检测车开发过程中的关键技术进行了深入研究,主要研究内容有ʒ①整车结构设计与布置;②液压系统设计;③控制系统设计;④结构强度与稳定性分析;⑤图像采集与处理系统开发。
1桥梁检测车的结构和工作原理1.1桁架式桥梁检测车结构整车结构如图1所示,主要由底盘车、上部工作装置、液压系统、电控系统和图像采集与处理系统5部分组成。
底盘车采用成熟的通用汽车底盘,根据整车的布置作适当的改动;工作装置采用桁架结构,刚度强度要求比较高,整体加工难度比较高;液压系统主要元器件采用进口器件;电控系统用于整车的动作控制和运动位置的检测;图像采集与处理系统包括高速摄像系统、图像显示系统和图像存储与处理系统,用于对桥梁的自动化检测。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
据:
( 缸的等效活塞面积 A 1 ) 。
G ) — } 一 ( = — 2 )
式 中, . KI v _ 一电压一 速度 增益 ; K K/ K = g qA ;
32 电液 比例位 置控 制 系统 的建模 .
A 0 23 5 ,A 0.01 81 5 , 1 =0.o 7 m 2 0 7 2 m2 =
维普资讯
第 4期 ( 总第 2 9期 )
20 0 8年 7月
流体 动与 控副
Fu d o rTrn miso a d Co to Ii P we a s sin n nr l
N .(ei o 9 o4Sr lN . ) a 2
J l .0 8 uy2 0
5 在此取 0 , , . 则无杆腔与有 杆腔的工作 面积之 比 5 约为 1 3 因此选两个 节流 口的节流槽的数 目之 比 ., 3 1 1 对称 阀芯 比较合 适 ,根 据 阀 的特性 参 数 可计 :的 算 出:an i . m W: bi 3m 液 压 油 密度 取 w=  ̄= 3 m,bn = 3 m, w 23 W 2
p 7 g n; =8 0k /r
2 智能桥梁检测车液压控 制系统
本液压系统所有执行元件都 由电液 比例方 向 阀控制其线速度 、 角速度大小及方 向。桥梁检测车 液 压 原理 图如 图 2所 示 。 台液压 马达 1竖直 臂 回 转 、 转液压马达 2 采用并联缓冲阀式缓冲 回路 , , 当回转 机构制动 、 止或反转时 , 停 高压 腔 的液 压 油 经 过 缓 冲阀直接进入低压腔减小 了液压冲击 ; 出臂摆幅 伸 液 压 缸 3 竖直 臂 摆 幅液 压 缸 4 工作 臂 摆 幅 液压 缸 、 、 5 伸 出臂 伸缩 液 压 缸 6 竖直 臂 伸 缩 液压 缸 7 工 作 、 、 、 臂一级伸缩液压缸 8 工作臂二级伸缩液压缸 9 工 、 、 1 智能桥梁检测车基本机构 作 臂 三 级伸 缩 液 压 缸 1 、工 作 臂 四 级伸 缩 液 压 缸 O 智能桥梁检测车 由底盘 、 支腿机构 、 作业装置 、 1、 1工作臂五级伸缩液压缸 1 , 2 在工作 时都有平衡 这 以 作业装置 电液控制系统 、 电控箱等 部分组成 , 其基 ‘ 重 量 变 化 , 些 执 行 元 件 均 采 用 平 衡 回路 , 防止 本机 构的展 开状 态如 图 1所示 。 “ 头” 点 现象 发 生 ; 腿液 压 缸均 为双 液压 缸 同步缸 支 桥梁 检测 车 臂架 结 构 可分 为 伸臂 机 构 、 回转 机 1 、4 3 1 ,为保证动作 同步 ,在回路 中接人分流集流 构及摆幅机构 。伸臂机构包括伸 出臂 4 竖直臂 9 阀;其 中两个支腿液压缸各配有一个双向液压锁 , 、 、 工作臂 1 , 1 回转机构包括 转台 回转 机构 2 伸出臂 以保证支腿可靠地锁住。 、 回转 机 构 7 摆 幅机 构包 括 伸 出臂 摆 幅 机构 5 竖 直 , 、 臂摆 幅机 构 8工 作臂 摆 幅机构 1 。 、 O
维普资讯
溢体秸动 控副
28 第4 0年 期 0
G=( 町Gs =x v 毒 ( s ) G )
( ¨ )- -+ ( -- Z  ̄ +)
2==0。0为 17800为移= )m5 .阀0 k统.M心0 22m2 0 1系主真 FN 0 7要3 位, 4.,参 =区 % 0Jm 死 5m7P 3 mk,a ,s。数 g,仿m T的=, =g7 ,/ 3 ;C= pd 1B W
智能桥梁检测车臂架 电液 比例控 制的研究
王 凡 吴百 海 肖体 兵
509 ) 100 (广东工业大学 广东广州
摘 要 : 出了一种新 型桥梁检测车臂架 的基 本结 构 , 提 建立工作臂摆 幅机构 液压 回路仿真模型 , 对工作 臂摆 幅机构 液 压回路进行仿真实验 , 验证工作臂摆幅机构液压 回路 的可行性 。
关键词 : 桥梁检 测车 ; 幅机构 ; 摆 液压系统 ; 仿真 中图分类号 :H17 T 3 文献标识码 : B 文章编号 :17 — 9 4 (0 8 0 - 0 3 0 3 6 2 80 20 )4 0 2 — 0
引 言
智 能 桥 梁 检 测 车 是 指 以新 型 多 自由度 多 关 节 长臂装置为载体 , 融合智能控制 、 光机 电一体化 、 视 频跟踪 、 计算机图像处 理等高新尖技术 , 解决大型 桥 梁底 部缺 陷 自动 检 测特 种转 面 ,具 有 高效 率 、 安 全 和使 用 范围不受 桥梁 结构 限制 的 特点 。工 作臂 摆 幅液 压 回路 是 智 能 桥 梁 检 测 车 液 压 系 统 重要 的 组 成, 它采 用 电液 比例 控 制技 术 。本 文 对 这 一 电液 比 例控制系统进行了仿真研究。
Ap( A / = .0 0 8 m ,+  ̄ 2 0 2 7 5 =4 1 0 1 2
() 系数 K 2流量 活塞 杆受 拉 时 ,液压 缸 的杆径 比一 般 为 030 .- .
根 据式 () 画 出 电液 比例 阀控 缸 位 置控 制 系 2可
统框 图 . 图 3所示 如
像 ; 雾
图 2液压 系统原理 图
图 1基 本 结 构 示 意 图
收稿Байду номын сангаас日期 :0 80 — 4 20 — 5 1
囊 j
3 工作臂摆幅机构 电液 比例控制 系统建模 与仿真
31电液 比例模 拟 系统 的数 学模 型 .
作者简介 : 凡 , 王 在读硕士研究生 。
设 电压 为输入 , 缸活塞位移 】为输 出 , , 电液 比例阀控缸系统的传递函数为: