融合子带分析的加权广义互相关双声源定位
声音定位和声源识别算法研究综述

声音定位和声源识别算法研究综述声音定位和声源识别是现代信号处理领域的重要研究方向之一。
随着智能音箱、语音助手等智能设备的普及,声音定位和声源识别技术得到了广泛的应用和关注。
本文将综述声音定位和声源识别算法的研究进展,介绍其应用领域和未来发展趋势。
一、声音定位算法的研究声音定位是指根据接收到的声音信号确定声源的方位角和俯仰角的过程。
声音定位算法主要分为基于时差的方法和基于能量的方法两种。
基于时差的方法利用声音信号在不同麦克风之间传播的时间差来确定声源的方位角。
常用的方法包括互相关法、波束形成法和最小二乘法等。
互相关法通过计算麦克风信号之间的互相关函数来估计时差,进而得到声源的方位角。
波束形成法则是通过对麦克风信号进行加权和相位调节,使得声源方向上的信号增益最大,从而实现声音定位。
最小二乘法则是通过最小化麦克风信号与声源信号之间的误差平方和,来估计声源的方位角。
基于能量的方法则是通过对声音信号的能量进行分析,来确定声源的方位角。
常见的方法包括声音强度法和声音梯度法。
声音强度法通过计算麦克风信号的能量差来确定声源的方位角。
声音梯度法则是通过计算麦克风信号的梯度来确定声源的方位角。
二、声源识别算法的研究声源识别是指根据接收到的声音信号判断声源的种类或身份的过程。
声源识别算法主要分为基于特征提取的方法和基于机器学习的方法两种。
基于特征提取的方法通过对声音信号的频谱、时域特征等进行提取和分析,来判断声源的种类或身份。
常见的特征包括MFCC(Mel Frequency Cepstral Coefficients)、SVM(Support Vector Machine)等。
MFCC是一种常用的声音特征提取方法,它通过将声音信号映射到梅尔频率尺度上,并提取其倒谱系数,从而得到一组具有较好区分能力的特征向量。
SVM则是一种常用的机器学习算法,它通过构建一个最优的超平面来实现声源的分类。
基于机器学习的方法则是通过训练一组声音样本,建立声音模型,并利用该模型对新的声音信号进行分类。
声源定位算法及实现
首先,端点检测是语音预处理中关键的一环。避免对无声的信号段的处理, 不仅大大降低了运算量,而且提高了有声信号的利用率,最终提高后续定位的精 度。利用噪声近似服从高斯分布以及语音和噪声相互统计独立的假设,引入了四 阶累积量对语音端点进行检测,抑制了背景噪声的影响。其次,基于到达时间差 的声源定位算法是当前最为流行的算法,它由时延估计和定位估计两部分组成。 对于时延估计,本文在前人提出的互功率谱相位算法(CSP)算法的基础上提出了 一种改进算法,通过滤除语音范围之外无贡献的互功率谱,达到增加语音主要频 段内的幅度权重的目的,抑制了非期望峰值,提高了估计精度;对于定位估计, 本文以已有的球形插值算法(so得到的定位估计作为初值,利用LMS算法进行迭 代搜索得到最小方差意义下的空间最优解,克服了原SI算法中存在的误差度量 函数非最优和迭代更新定位收敛不确定的问题。定位实验结果表明,本文所提出 的算法使定位精度得到了较大提高,是一种行之有效的算法。
fourth-order cumldant is introduccd to detect the endpoint.,which greatly suppresses the effect of noise.Secondly,time delay of arrival(TDOA)based method is the most
estimation;for localization estimation,the closed-form estimation of spherical interpolation(so method is regarded as the initial value,and then LSM algorithm is employed to obtain optimal resolution in the least-squares sense through iteration.The proposed method solves some problems in SI method.It guarantees that the
声源定位算法及实现
声源定位算法及实现声源定位算法大致可以分为传统方法和深度学习方法两种。
其中,传统方法主要基于声音在麦克风阵列中的时延差(Time Difference of Arrival, TDOA)或协方差矩阵分析来估计声源位置。
而深度学习方法则利用深度神经网络来学习声音特征,进而实现声源定位。
传统的声源定位算法中,最常用的方法是通过计算声波在不同麦克风之间的延迟差来确定声源位置。
这种方法称为时延差法。
具体步骤如下:1.首先,需要设置一个麦克风阵列,通常是线性阵列或圆形阵列。
2.然后,从各个麦克风收集到的声音信号通过时域差异检测(如互相关法或差分法)计算得到时延差。
3.接下来,根据时延差计算声源方向。
一种常用的方法是通过计算声源在麦克风阵列中的波前形成来确定声源位置。
除了时延差法,协方差矩阵分析也是常用的声源定位方法之一、该方法通过计算麦克风阵列中各麦克风间的协方差矩阵来估计声源位置。
具体步骤如下:1.首先,将收集到的声音信号通过时域差异检测计算得到时延差。
2.然后,利用时延差计算麦克风间的协方差矩阵。
3.最后,根据协方差矩阵的特征值和特征向量分析来确定声源位置。
深度学习方法是近年来发展起来的一种声源定位算法。
这种方法通过使用神经网络来学习声音特征,并根据这些特征来估计声源位置。
深度学习方法具有以下几个步骤:1.首先,需要准备一个具有标注声源位置的训练数据集。
该数据集由多个声音信号和对应的声源位置组成。
2.然后,将声音信号输入到深度神经网络中,并训练网络来学习声音特征。
训练过程通常使用反向传播算法来更新网络权重。
3.最后,通过输入未知声音信号到训练好的神经网络中,利用网络输出的特征来估计声源位置。
声源定位算法的实现可以使用多种编程语言和工具。
例如,可以使用Python语言结合相关的音频处理库(如Librosa、PyAudio)来实现传统声源定位算法。
对于深度学习方法,可以使用深度学习框架(如TensorFlow、PyTorch)来实现。
声源定位的算法原理
声源定位的算法原理声源定位是指通过分析声音信号,确定声音源的位置的技术。
声源定位在很多领域都有应用,如语音识别、语音跟踪、音频会议等。
声源定位的算法原理主要包括多麦克风阵列、波束形成和时间延迟估计等。
1. 多麦克风阵列(Microphone Array):多麦克风阵列是指将多个麦克风均匀地布置在空间中,以便同时接收不同位置的声音信号。
麦克风阵列可以通过增加麦克风数量来提高声源定位的精度。
通常,麦克风阵列的形状可以是线性的、圆形的或者其他形状的,不同的阵列形状会对声源定位的效果产生影响。
2. 波束形成(Beamforming):波束形成是一种通过对麦克风阵列中的麦克风信号进行加权和叠加,以增强来自目标声源的信号,并抑制背景噪音和干扰声音的技术。
波束形成的目的是使得阵列信号中来自目标声源的能量最大化。
常见的波束形成算法包括被动波束形成、激发波束形成和自适应波束形成等。
- 被动波束形成(Passive Beamforming):被动波束形成是指通过简单的叠加麦克风阵列的信号,以增强来自目标声源的信号。
被动波束形成不需要估计声源的方向,因此算法相对简单,但精度较低。
- 激发波束形成(Adaptive Beamforming):激发波束形成是指根据估计的声源方向,调整麦克风阵列信号的加权系数,以实现抑制背景噪音和干扰声音的目的。
激发波束形成由于需要估计声源的方向,因此算法复杂度较高,但精度较高。
- 自适应波束形成(Adaptive Beamforming):自适应波束形成是指根据实时接收的信号和背景噪音的统计特性,自适应地调整麦克风阵列的加权系数,以实现最优波束形成。
自适应波束形成利用信号处理算法来估计加权系数,从而抑制干扰声音和背景噪音。
3. 时间延迟估计(Time Delay Estimation):时间延迟估计是指通过分析麦克风阵列中不同麦克风接收到的信号之间的时间差,来估计声源的方向。
常见的时间延迟估计算法包括互相关法、基于延迟和和互相关法、最大似然估计法等。
声源定位的算法原理

声源定位的算法原理声源定位算法是通过分析和处理音频信号,确定声源的位置或方向。
常见的声源定位算法包括交叉相关法、泛音法、多麦克风阵列法等。
下面将详细介绍这些算法的原理。
1.交叉相关法:交叉相关法是一种经典的声源定位算法。
它基于两个麦克风之间的时间差(Time Difference of Arrival,简称TDOA)来确定声源的位置。
首先,通过两个麦克风接收到的声音信号计算出它们的自相关函数。
然后,两个自相关函数进行互相关运算,得到互相关函数。
根据互相关函数的峰值位置,可以通过时间差来确定声源的方向。
具体步骤如下:-麦克风接收到的声音信号进行滤波和采样。
-计算出两个麦克风的自相关函数。
-对两个自相关函数进行互相关运算,得到互相关函数。
-找到互相关函数的峰值位置,根据时间差计算声源的方向。
2.泛音法:泛音法是一种利用声音的频率特征来确定声源方向的算法。
声音在传播过程中会发生多次反射,形成泛音。
这些泛音在不同位置的麦克风上的相对振幅会发生变化。
通过分析不同麦克风上的频率响应,可以确定声源的位置。
具体步骤如下:-通过多个麦克风接收到的声音信号计算频谱。
-分析不同麦克风上的频谱,在频域上找到波峰位置。
3.多麦克风阵列法:多麦克风阵列法是一种基于信号处理技术的声源定位算法。
它利用多个麦克风接收到的声音信号之间的差异来确定声源的方位。
通过利用阵列中的多个麦克风之间的时延差、振幅差和相位差等信息,可以实现高精度的声源定位。
-设置一个具有多个麦克风的阵列。
-同时接收到来自不同麦克风的声音信号,并利用信号处理技术进行预处理。
-通过计算麦克风之间的时延差、振幅差和相位差等信息,确定声源的位置。
声源定位算法在很多领域都有广泛的应用,如语音识别、视频会议、智能家居等。
通过对声音信号的分析和处理,可以准确地确定声源的位置和方位,为人们提供更多便利和服务。
声源定位中广义互相关时延估计算法的研究
声源定位中广义互相关时延估计算法的研究茅惠达;张玲华【摘要】基于时延估计(TDE)的声源定位算法是数字助听器中的核心算法之一,其估计精度会受到噪声和采样频率等因素的影响,导致了定位的不准确性。
针对这一问题,结合相关峰精确插值算法(FICP),提出了一种基于二次相关改进的广义互相关时延估计算法。
该算法通过二次相关,有效地降低噪声的干扰,再利用FICP,提高相关函数的分辨率。
仿真实验表明,无论在低信噪比,还是在高信噪比环境下,改进算法的时延估计性能都有了明显改善。
%Sound source localization based on Time Delay Estimation(TDE)is one of the core of the algorithm in hearing aids. However, the estimation accuracy is often affected by the sampling rate and noise, which leads to the inaccuracy of location. In order to solve the problem, in this paper, combined with Fine Interpolation of Correlation Peak method (FICP), an improved generalized cross correlation algorithm based on second correlation is proposed. In the proposed method, second correlation is adopted to reduce the interference of noise, FICP is used to improve the resolution of corre-lation function. The simulation results show that under both low SNR and high SNR environments, the proposed method can improve the performance of time delay estimation significantly.【期刊名称】《计算机工程与应用》【年(卷),期】2016(052)022【总页数】5页(P138-142)【关键词】时延估计;广义互相关;二次相关;相关峰精确插值【作者】茅惠达;张玲华【作者单位】南京邮电大学通信与信息工程学院,南京 210003;南京邮电大学通信与信息工程学院,南京 210003【正文语种】中文【中图分类】TP391MAO Huida,ZHANG Linghua.Computer Engineering andApplications,2016,52(22):138-142.声源定位技术是数字助听器中的一项关键技术,它利用麦克风阵列对声音信号进行采集,并通过对采集到的信号进行处理从而得到声源位置。
基于BP神经网络的双耳声源定位算法

基于BP神经网络的双耳声源定位算法谈雅文;王立杰;姚昕羽;汤一彬;周琳【摘要】为了提高复杂声学环境中双耳声源定位性能,本文利用多种双耳空间特征参数,提出了基于神经网络方法的鲁棒双耳声源定位算法.本文将不同声学环境下双耳声信号对应的互相关函数、耳间强度差等空间定位线索,作为输入特征,用于训练BP神经网络.在混响和噪声环境下,与传统双耳定位算法相比,本文基于BP神经网络的双耳定位算法的定位性能有显著提高,特别是低信噪比条件下,定位正确率提高更为显著.【期刊名称】《电声技术》【年(卷),期】2018(042)005【总页数】6页(P28-32,56)【关键词】双耳声源定位;双耳空间线索;BP神经网络【作者】谈雅文;王立杰;姚昕羽;汤一彬;周琳【作者单位】河海大学物联网工程学院,江苏常州213022;东南大学信息科学与工程学院,江苏南京210096;东南大学信息科学与工程学院,江苏南京210096;河海大学物联网工程学院,江苏常州213022;东南大学信息科学与工程学院,江苏南京210096【正文语种】中文【中图分类】TN912.31 前言随着大数据、人工智能的快速发展,语音交互、语音控制等语音信号处理系统的应用日益广泛。
作为语音信号处理的前端,声源定位算法能够改善语音信号处理系统的性能,特别是在混响和噪声环境下。
基于声源定位的语音处理系统不仅可以改善语音的感知质量,还可以提高语音识别、说话人识别的正确率;应用于助听装置时,也可为听力障碍者提供声源位置信息,提供有效语音信息。
总体而言,声源定位算法目前分为两类:基于阵列信号处理的麦克风声源定位和基于计算场景分析CASA(Computational Auditory Scene Analysis)的双耳声源定位。
基于CASA的双耳声源定位方法,模拟人耳的空间听觉感知特性,基于双耳效应,通过2个麦克风就可以实现复杂声学环境下的声源定位。
由于双耳声源定位算法不需要庞大的麦克风阵列系统,大大节省了空间资源,提高了实用性,已经成为声源定位算法的重要研究方向。
多位置融合算法
多位置融合算法
多位置融合算法通常是指在处理位置数据时,将多个位置信息融合在一起,以获得更准确、更全面的结果。
这种算法通常用于定位、导航、路径规划等领域。
多位置融合算法的实现方式可以根据具体的应用场景和数据类型而有所不同。
以下是一些常见的方法:
1. 加权平均法:将多个位置的坐标进行加权平均,得到一个新的位置坐标。
权重可以根据位置的可靠性和精度等因素来设置。
2. 卡尔曼滤波器:卡尔曼滤波器是一种用于估计状态变量的递归滤波器,可以结合多个位置信息来估计物体的真实位置和速度。
卡尔曼滤波器可以考虑到测量噪声和系统噪声等因素,从而提高估计的精度和稳定性。
3. 粒子滤波器:粒子滤波器是一种基于蒙特卡罗方法的递归滤波器,通过模拟大量粒子的运动和观测来估计状态变量的后验概率分布。
粒子滤波器可以处理非线性非高斯问题,适用于复杂的定位和导航场景。
4. 贝叶斯滤波器:贝叶斯滤波器是一种基于贝叶斯定理的递归滤波器,通过结合多个位置信息来估计物体的真实位置和速度。
贝叶斯滤波器可以考虑到不确定性和不完整性等因素,从而提供更可靠的结果。
这些方法可以根据具体的应用场景和数据类型进行选择和组合,以达到最佳的效果。
声源定位与跟踪中的自适应算法综述
声源定位与跟踪中的自适应算法综述声源定位与跟踪是指在多声源环境中,通过分析音频信号来确定声源的位置,并通过跟踪声源的位置变化实现实时的声源定位与跟踪。
在实际应用中,声源定位与跟踪的技术被广泛应用于语音识别、追踪系统、语音增强等领域。
随着科技的发展,研究者们提出了许多自适应算法来实现声源定位与跟踪。
这些算法通过自适应处理音频信号,能够适应不同的环境和噪声干扰,提高了声源定位与跟踪的准确性和稳定性。
自适应算法的核心思想是根据传感器接收到的声音信号,并结合环境噪声等信息,对声源的位置进行估计。
其中,常用的自适应算法包括基于波束形成的MVDR算法、基于延迟和和平均的GCC-PHAT算法、基于互相关的GCC-NCC算法等。
MVDR(Minimum Variance Distortionless Response)算法是一种常用的自适应波束形成算法。
它的核心思想是通过调整不同传感器间的权重来抑制多路径效应和噪声干扰,并最小化输出信号的方差。
MVDR算法在处理定位中的多径效应和噪声干扰方面表现出较好的性能,但对于模型误匹配和信号截断等情况较为敏感。
GCC-PHAT(Generalized Cross Correlation-Phase Transform)算法是一种通过计算差分延迟和相位信息来确定声源位置的自适应算法。
该算法通过计算传感器接收到的音频信号之间的互相关函数,得出音频信号之间的时延差,并结合相位信息推测声源的位置。
GCC-PHAT算法在处理定位中的多路径效应和噪声干扰方面表现出较好的鲁棒性,但对于近距离声源和低频声音的定位存在一定的限制。
GCC-NCC(Generalized Cross Correlation-Normalized Cross Correlation)算法是一种将标准互相关算法与规范化互相关算法相结合的自适应算法。
该算法通过计算互相关函数得到声源定位的初步估计,再通过标准互相关和规范化互相关的结合来提高声源定位的准确性和鲁棒性。
声源定位相关算法
声源定位相关算法声源定位算法是指通过分析声音在不同麦克风之间的时差、幅度差或频率差等信息,来确定声源在空间中的位置。
声源定位算法在许多领域中都有广泛应用,例如音频信号处理、声纹识别和智能音箱等。
1.交叉关联法(Cross-Correlation Method)交叉关联法是一种常用的声源定位方法,通过计算不同麦克风间的互相关函数来确定声源的到达时间差。
该方法基于声波在不同麦克风之间传播的时间差与声源到麦克风之间的距离成正比的关系。
通过求取互相关函数的峰值,可以确定声源相对于麦克风阵列的方向。
2.泛音延迟测量法(Time Delay Estimation by Harmonics)泛音延迟测量法是一种基于声音的频率特性的声源定位方法。
该方法利用声源的泛音频谱以及不同麦克风间的时差关系,通过对声音信号进行频谱分析和时频域处理,可以确定声源的到达时间差,进而确定声源的方向。
3.声强级差法(Interaural Level Difference)声强级差法是一种基于声音的幅度特性的声源定位方法。
该方法当声源位于一侧时,会产生一个方向性响应,而声强级差则会随着声源角度的变化而变化。
通过计算不同麦克风的声压级差,可以确定声源的方向。
4.搭配卡尔曼滤波的定位算法(Kalman Filter-based Localization Algorithm)搭配卡尔曼滤波的定位算法是一种基于状态估计的声源定位方法,可以用来估计声源的位置和速度。
该方法结合了声音传播模型和测量模型,通过初始位置和速度的估计以及麦克风阵列的测量信息,通过递推的方式对声源的位置和速度进行估计。
5.分束技术(Beamforming Technique)分束技术是一种基于声音波前的声源定位方法。
该方法利用多个麦克风的信号相位差,通过调整麦克风阵列的权重系数,可以实现声源的定向接收和抑制噪声的目的。
分束技术可以用于提高声源定位的准确性和鲁棒性。
除了上述几种常见的声源定位算法,还有一些其他的方法和改进技术,例如多麦克风阵列的布置优化、噪声环境下的声源定位方法、深度学习在声源定位中的应用等。
声源定位算法及实现
声源定位算法及实现
一.0引言
声源定位指的是利用声学信号进行定位,它可以用来测量声源的位置和方向,根据声源的位置和方向进行无线传输、航空航天导航以及声学检测等多种用途。
有许多研究人员把它应用到了机器人导航、交通监测、室内定位等领域。
在研究过程中,主要依据声源定位的原理,采用不同的传输信号、可视化方法和数据处理算法,来实现对声源的定位。
二.声源定位的原理
声源定位的基本原理是:当声源的高频声波在传播的过程中会受到其中一种障碍物的影响,并且发出以时间延迟和周围环境空气密度、障碍物等因素导致的不同的声音,从而可将声源的位置进行定位。
声源定位技术可以分为两大类:一类是直接定位技术,另一类是间接定位技术。
直接定位技术又可细分为传声回波定位、超声定位、雷达定位和超音速定位等。
间接定位技术可以采用声纳技术、声波反射和折射理论等。
三.声源定位的实现方法
(1)传声回波定位
传声回波定位是一种直接定位技术,它实现的原理是在监测区域放置多个接收器,当声源发出的声波传播到接收器时,接收器会接收到传来的无线电波,而接收器的各个接收点会接收到不同的时间差的电波。
阵列信号识别声源相关总结_1002分析
阵列信号识别声源相关总结1 阵列信号识别声源的方法归类噪声源的识别方法可大致分为3类:传统的噪声源识别方法,如选择运行法、铅覆盖法及数值分析方法等,传统方法虽然陈旧、使用效率低,但目前仍有许多企业在应用。
例如,为了测量汽车高速行驶时的车内噪声,需要将车门缝隙用铅皮封住;第二类,利用现代信号处理技术进行噪声源识别,如声强法、相干分析、偏相干分析适合与很多场合,能解决许多一般问题。
如评价某些噪声源、某些频谱对场点(模拟人头耳朵处),这时采用相干分析就可以解决。
第三类,利用现代图像识别技术进行振动噪声源识别,其分为两种,一种是近场声全息方法(NAH),一种是波束形成方法(Beamforming)。
相比于传统识别和现代信号处理方法,声阵列技术具有测试操作简单、识别效率高,以及可对声源进行量化分析并对声场进行预测等优点。
1.1 声全息方法近场声全息技术经过很长时间的发展已经日趋成熟,广泛应用于近距离测量和对中低频噪声源的识别。
声全息方法,其基本原理是首先在采样面上记录包括声波振幅和相位信息的全息数据,然后利用声全息重建公式推算出重建面上的声场分布。
该方法一方面可以获得车外声场分布的三维信息,另一方面可以进行运动车辆车外噪声源识别的研究,而且还具有在进行噪声测试时,抗外界干扰强的特点。
按声场测量的原理可分为常规声全息、近场声全息和远场声全息三种。
常规声全息,全息数据是在被测物体的辐射或散射场的菲涅尔区和弗朗和费区(即全息接收面与物体的距离d远大于波长λ的条件下)采用光学照相或数字记录设备记录的,因为受到自身实用条件的限制,根据全息测量面重建的图像受制于声波的波长。
它只能记录空间波数小于等于2π/λ的传播波成分,而且其全息测量面只能正对从声源出来的一个小立体角。
因此,当声源辐射场具有方向性时,可能丢失声源的重要信息。
并且通过声压记录得到的全息图,只能用于重建声压场,而不能得到振速、声强等物理量。
远场声全息NAH(Near-field Acoustical Holography),其特点是全息记录平面与全息重建平面的距离d远远大于声波的波长λ,即其全息数据是在被测声源产生声场的辐射或散射声场的菲涅尔区和弗朗和费区获得的。
基于双谱加权空间相关矩阵的语音声源定位方法[发明专利]
![基于双谱加权空间相关矩阵的语音声源定位方法[发明专利]](https://img.taocdn.com/s3/m/aff640c3ccbff121dc36833d.png)
专利名称:基于双谱加权空间相关矩阵的语音声源定位方法专利类型:发明专利
发明人:刘文举,雪巍,梁山
申请号:CN201510937548.3
申请日:20151215
公开号:CN105609113A
公开日:
20160525
专利内容由知识产权出版社提供
摘要:针对实际复杂噪声环境下基于麦克风阵列的鲁棒语音声源定位问题,本发明利用双谱域上麦克风阵列所接收的语音信号及噪声信号的特殊数学性质,提供了一种基于双谱加权空间相关矩阵的语音声源定位方法,包括:对麦克风阵列采集到的信号进行分帧及双谱估计;在双谱域上,计算各个麦克风和参考麦克风之间的双谱相位差;采用参考麦克风的信号,估计双谱单元权重;根据双谱相位差和双谱单元权重,计算对应于候选方位的双谱加权空间相关矩阵;基于双谱加权空间相关矩阵特征值,计算针对当前候选方位的声源方位代价函数;根据声源方位代价函数最大值所对应的方位,估计语音声源方位。
申请人:中国科学院自动化研究所
地址:100190 北京市海淀区中关村东路95号
国籍:CN
代理机构:中科专利商标代理有限责任公司
代理人:吕雁葭
更多信息请下载全文后查看。
混响环境下基于双耳信号的声源定位算法研究

混响环境下基于双耳信号的声源定位算法研究在混响环境下,声音波动会反射和散射,导致声源定位变得更加困难。
然而,基于双耳信号的声源定位算法可以利用人耳的双耳定位能力,通过比较两耳接收到的声音特征来估计声源的位置。
双耳信号的声源定位算法主要分为时间差和强度差两个方法。
时间差方法是通过估计声波从声源到达两耳之间的延迟时间来确定声源位置。
这种方法的基本原理是在声波到达两耳之间的时间差越大,声源离听者越远。
利用该方法进行声源定位时,可以使用互相关函数来计算两个耳道信号之间的时间差,然后根据时间差来确定声源位置。
然而,在混响环境下,反射声波和多径效应会导致时间差的估计不准确。
因此,需要使用适应性滤波器来除去混响信号和噪声对时间差估计的影响。
强度差方法是通过比较两耳接收到的声音强度来确定声源位置。
这种方法的基本原理是声源离耳朵越远,声音的强度衰减越大。
在利用强度差方法进行声源定位时,可以使用加权交叉关联函数来计算两个耳道信号之间的相对强度差,然后根据强度差来确定声源位置。
然而,在混响环境下,散射声波和反射信号会引起声音的强度衰减不均匀,从而导致强度差的估计不准确。
因此,需要根据混响环境的特征对强度差进行修正。
除了时间差和强度差方法,还可以使用波束形成技术来改善混响环境下的声源定位。
波束形成技术是通过在微型麦克风阵列上应用加权因子来聚焦声波的传播方向,从而提高声源定位的准确性。
在利用波束形成技术进行声源定位时,可以使用自适应滤波算法来计算加权因子。
自适应滤波算法可以根据声音的传播路径和混响环境的特征来调整加权因子,从而提高声源定位的性能。
总之,混响环境下基于双耳信号的声源定位算法是一个复杂且具有挑战性的问题。
需要根据具体环境的特征和人耳的感知机制来设计合适的算法。
未来的研究可以进一步探索混响环境下的声源定位算法,并结合机器学习和深度学习的方法来改进声源定位的准确性和鲁棒性。
虚拟现实技术中的立体声音源定位方法
虚拟现实技术中的立体声音源定位方法虚拟现实(Virtual Reality,简称VR)技术已经在近年来迅猛发展,并在各个领域得到广泛应用。
虚拟现实技术通过模拟现实环境,使用户可以身临其境地体验虚拟世界。
在虚拟现实体验中,立体声音源的准确定位是实现沉浸式体验的关键之一。
本文将介绍虚拟现实技术中常见的立体声音源定位方法。
虚拟现实技术的立体声音源定位目标是在虚拟环境中准确模拟真实环境中的声音传播和声源位置,以使用户在虚拟环境中获得更加真实的听觉体验。
以下是几种常见的立体声音源定位方法:1. 广义交叉耳(Generalized Cross-Correlation)广义交叉耳是一种经典的立体声音源定位方法。
该方法通过计算麦克风阵列中各个麦克风对来自声源的信号的互相关系数,从而得到声源的方位信息。
广义交叉耳方法结合了时域和频域的特征,可以提高声源定位的准确度。
2. 参数化方法参数化方法是一种基于声学模型的立体声音源定位方法。
该方法通过建立声学模型,利用声源在虚拟环境中的传播特性进行声源定位。
常见的参数化方法包括声学特征提取、声学信号处理和参数估计等步骤。
参数化方法可以克服由于不同的听音环境而带来的声音传播差异,提高声源定位的稳定性和准确度。
3. 人工智能方法随着人工智能技术的快速发展,人工智能方法在虚拟现实技术中的立体声音源定位也得到了广泛应用。
人工智能方法通过训练大量的数据样本,学习声学特征和声源位置之间的关系。
通过深度学习和神经网络模型,可以实现对声源的自动定位和跟踪。
人工智能方法不仅可以提高声源定位的准确度,还可以根据用户的位置和动作调整声音传播的效果,使得虚拟现实体验更具交互性和真实感。
4. 头相关传输函数头相关传输函数(Head-Related Transfer Function,简称HRTF)是一种利用人体头部的形状和结构对声音传播进行建模的方法。
通过测量和模拟人体头部对声音传播的影响,可以实现对声源位置的准确定位。
一种基于互相关算法的二维声源定位系统
c=c2*c2-c1*c1+1.0/16.0/c2/c2-1.0/16.0/c1/
c1;
xx=(0-b+sqrt(b*b-4.0*a*c))/2.0/a;
if(xx<0.25)
xx=(0.0-b-sqrt(b*b-4.0*a*c))/2.0/a;
yy=sqrt(c1*c1+1.0/16.0/c1/c1-0.5-4*xx*xx+1.0/
图中,U4A 部分电路为低通滤波器,保留频率低于语音 信号范围的信号。U4B 部分电路为高通滤波器,最终保留符 合语音信号频率的信号。U5A 部分电路是一级放大电路,给 信号加 1.5V 偏置,便于 STM32 中的 ADC 获取数据。
软件部分的设计
麦克风接收到的信号经过预处理电路后,经 ADC 采样 在 STM32 单片机中进行运算处理。在处理运算时,先进行 端点检测,再进行时延计算,带入几何关系求解声源坐标, 再根据声源坐标得到声源的方向角。
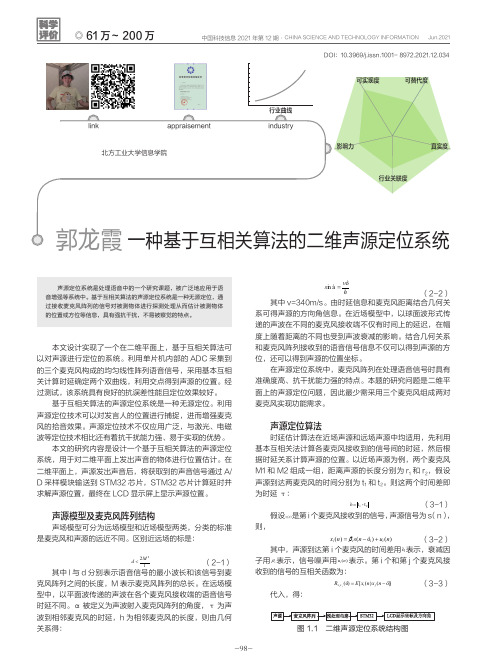
则,
xi (n) = βis(n − ôi ) + ui (n)
(3-2)
其中,声源到达第 i 个麦克风的时间差用 ôi 表示,衰减因
子用 βi 表示,信号噪声用 ui(n) 表示。第 i 个和第 j 个麦克风接
收到的信号的互相关函数为:
代入,得:
Rxix j (ô) = E[xi (n)x j (n − ô)]
和麦克风阵列接收到的语音信号信息不仅可以得到声源的方
位,还可以得到声源的位置坐标。
在声源定位系统中,麦克风阵列在处理语音信号时具有
准确度高、抗干扰能力强的特点。本题的研究问题是二维平
面上的声源定位问题,因此最少需采用三个麦克风组成两对
麦克风实现功能需求。
宠物声源定位算法设计

物联网技术 2023年 / 第9期100 引 言智能宠物陪伴机器人是一类具有智能喂食、宠物监护、与宠物互动等功能的机器人,其设计目的是帮助外出的主人陪伴、监护家中宠物。
智能宠物陪伴机器人大多配备有摄像头,便于主人远程查看宠物动态。
而宠物在家中的活动范围较大,可能出现宠物不在摄像头范围内的情况,此时主人便无法通过摄像头远程查看宠物动态。
解决上述问题的方案之一是:机器人首先定位家中宠物,然后控制移动机构到达宠物附近,使得摄像头范围内有宠物。
而目前已有的智能宠物陪伴机器人缺少对宠物进行室内定位的技术路线或功能模块。
本文提出利用基于麦克风阵列的声源定位技术路线设计解决机器人对宠物室内定位的问题。
单个麦克风易受噪声干扰,为了增强声音信号的采集、定位等,多数研究采用麦克风阵列形式,即多个麦克风以不同几何结构排列组合而成的阵列。
较之单个麦克风,麦克风阵列在减少环境噪声干扰等方面具有明显优势。
基于麦克风阵列的声源定位技术利用麦克风阵列采集声音信号,运用数字信号处理技术处理所得样本,采取合适声源定位算法对处理后的数据进行计算得出位置信息、声源相对位置坐标及角度等[1]。
基于麦克风阵列的声源定位算法主要有基于可控波束形成的声源定位算法、基于高分辨率频谱估计的声源定位算法及基于到达时间差的声源定位算法,其中基于到达时间差(Time Difference Of Arrival, TDOA )的声源定位算法相对来说实时性好、计算量小,具有较高的实用性[2]。
基于TDOA 的定位算法通过计算所收集的声源信号到达麦克风阵列的时间差进行时延估计,再通过构成麦克风阵列的几何形状建立声源定位模型,最后通过算法求解相对位置从而进行定位估计。
已有将基于TDOA 的声源定位算法应用于室内实时定位系统中的研究[3]。
本文将介绍宠物音频信号的预处理方法,以及基于麦克风阵列对宠物声源进行室内定位的声源定位 算法。
1 音频信号预处理采集到的宠物声音信号会由于宠物的发声器官本身和用于采集音频信号的设备产生混叠、高频和高次谐波失真等,被降低音频质量。
基于加权子空间拟合的声源定位与跟踪方法
第9期
金乃高等: 基于加权子空间拟合的声源定位与跟踪方法
2135
风接收到的语音信号 x m (t ) 可表示为
x m (t ) = ∑ s p (t − τmp ) + nm (t )
p =1 P
函数的要求,方位参数 θ 的估计最终归结为一个多维积分问 (1) 题。本文采用蒙特卡罗方法将多维积分问题转化为计算参数
Langevin 过程建立声源的运动模型[7]。假设说话人在 x 轴与
y 轴方向上的运动相互独立, 且说话人声源的高度固定。 在x
轴方向上,说话人声源运动模型的状态方程可以描述为 ⎡x k ⎤ ⎡1 ∆T ⎤ ⎡x k −1 ⎤ ⎡ 0 ⎤ ⎥⎢ ⎢ ⎥=⎢ ⎥ ⎢ ⎥ (10) ⎥ ⎢ k −1 ⎥ + ⎢b ⎥ ux ⎢x ⎥ ⎢ ⎢⎣ k ⎦⎥ ⎣⎢0 a χ ⎦⎥ ⎣⎢x ⎥⎦ ⎣⎢ x ⎦⎥ 其中 ∆T = L / fs ,这里 L 为语音帧长度, fs 是语音采样率;
2007-02-09收到,2008-01-10改回 国家自然科学基金(60772161,60372082)资助课题
较高的空间分辨率,且可以同时定位多个声源,因此受到广 泛关注。 在空间谱估计方法中,加权子空间拟合方法具有与最大 似然方法相近的渐进最优估计性能,可在高信噪比下逼近最 大似然方法的Cramer-Rao下界。 考虑到虚假声源的位置变化 具有明显的不确定性,而实际声源的运动通常具有一定的规 律性,文献[7]将说话人运动模型引入声源定位问题,通过粒 子滤波跟踪说话人的空间位置,可在一定程度上降低房间混 响的影响。 本文在研究宽带加权子空间拟合方法基础上,提出了一 种基于粒子滤波的麦克风阵列声源定位方法。该方法将窄带 加权子空间拟合算法推广至宽带情形,在贝叶斯估计理论框 架下构造出一个适用于宽带语音信号的似然函数,并采用粒 子滤波跟踪声源的位置。计算机仿真与实测结果验证了本文 方法的有效性。
一种结合听觉掩蔽与双耳互相关的声源定位算法
一种结合听觉掩蔽与双耳互相关的声源定位算法罗元;陈凯;张毅【摘要】In the noisy environment,the localisation accuracy of sound source localisation algorithm based on binaural cross-correlation (BCC)will deteriorate.In order to solve this problem,in this paper we propose a sound source localisation algorithm which combines the au-ditory masking-based spectral subtraction algorithm with the binaural cross-correlation.Before estimating the time-delay of binaural cross-cor-relation,the algorithm uses an auditory masking-based spectral subtraction algorithm,and effectively compresses the noises in signals of both left and right ears and raises the signal-to-noise ratio as well.Through combining with the binaural cross-correlation sound source localisation algorithm,this algorithm improves the accuracy of the interaural time difference estimation,and therefore meliorates the whole accuracy of sound source localisation.Experimental result shows that this algorithm is able to effectively reduce the localisation error caused by the noi-ses,and to improve the accuracy of sound resource localisation.%针对基于双耳互相关(BCC)的声源定位算法在噪声里定位精度下降的问题,提出一种结合听觉掩蔽谱减法与双耳互相关的声源定位算法。
gcc-phat改进方法
GCC-PHAT (Generalized Cross Correlation with Phase Transform) 是一种用于音频信号处理中的定位算法,通过计算两个麦克风之间的时延来确定声源的方向。
虽然 GCC-PHAT 已经被广泛应用并取得了许多成功,但是仍然存在一些改进的空间。
以下是一些可能的改进方法:1. 考虑非线性变换:GCC-PHAT 使用了相位变换来消除幅度谱的影响,但是对于某些信号,非线性变换可能会更有效。
可以尝试使用其他非线性变换方法,如互信息(mutual information)或互相关函数(cross-correlation function)。
2. 自适应滤波:GCC-PHAT 对于不同的环境和噪声条件可能不够鲁棒。
可以考虑引入自适应滤波技术,根据环境噪声的特点进行动态调整,以提高定位的准确性。
3. 多通道扩展:GCC-PHAT 基于两个麦克风之间的时延计算声源的方向,但是多通道信息可能包含更多有用的信息。
可以尝试将更多的麦克风加入到算法中,从而提高定位的精度。
4. 频率选择性:GCC-PHAT 在计算时延时使用了整个频谱,但是在某些情况下,声源可能只存在于特定的频率范围内。
可以尝试在计算时延时对频谱进行选择性过滤,以提高算法的效果。
5. 深度学习方法:近年来,深度学习在各个领域取得了显著的成果。
可以尝试将深度学习方法引入到声源定位中,通过训练神经网络来学习声源的方向,从而提高定位的准确性和鲁棒性。
当涉及到改进 GCC-PHAT 算法时,以下是一些更详细的方法和技术可以考虑:1. 基于频率子带的处理:GCC-PHAT 算法使用整个频谱进行时延计算,但是在某些情况下,声源可能只存在于特定的频率范围内。
为了提高算法的鲁棒性和准确性,可以将频谱分解成多个子带,并针对每个子带应用 GCC-PHAT 算法。
这样可以针对不同频率范围内的声源进行更精确的定位。
2. 自适应阈值设置:GCC-PHAT 算法使用固定的阈值来确定峰值时延,但是在不同的环境和噪声条件下,峰值的幅度和峰值之间的差异会有所变化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2017年11月计算机工程与设计 Nov. 2017第38 卷第11 期COMPUTER ENGINEERING AND DESIGN Vol. 38 No. 11融合子带分析的加权广义互相关双声源定位黄丽霞、昝丹斐、张晓丹、张雪英1+,王洪翠2(1.太原理工大学信息工程学院,山西太原030024;2.天津大学计算机科学与技术学院,天津300192)摘要:为提高混响环境下双声源定位系统的性能,提出基于子带分析的加权广义互相关双声源定位算法。
利用语音信号 在频域的稀疏性,将语音信号频域分为8个不同的子带,将基于平均幅度差函数加权的广义互相关算法投影到滤波器子带 空间中,通过加权平均的方式融合各子带的时间延迟信息,结合四元阵得到声源三维位置估计。
仿真结果表明,在两个声 源同时发声并存在混响的情况下,相对于传统的全频带广义互相关算法,基于子带分析的算法在定位准确率上有显著提 高,与基于广义互相关的子带分析算法相比,所提算法在混响情况下有较好的定位精度。
关键词:双声源定位;子带分析;广义互相关;平均幅度差函数;时延估计中图法分类号:T N912. 3 文献标识号:A文章编号:1000-7024 (2017) 11-3041-05doi:10. 16208/j. is s n l000-7024. 2017. 11. 027Localization of double sound sources based on weightedgeneralized cross correlation in sub-bandsH U A N G Li-xia1,Z A N Dan-fei1,Z H A N G Xiao-dan1,Z H A N G X u e-y i n g1+,W A N G H o n g-c u i2(1. College o f In fo rm a tio n E ngineering, T a iyu a n U n iv e rs ity o f T ech n o lo g y, T a iyu a n030024,C h in a;2. College o f C om puter Science and T ech n o lo g y, T ia n jin U n iv e rs ity, T ia n jin300192, C hina)Abstract:T o im prove the localization perform ance of double sound sources in reverberation situations? a localization m ethod fo r double sound sources based on sub-band w eighted generalized cross correlation (W C C) was presented Since sound signal is sparse in frequency dom ain, sound signal was divided in to e ig h t sub-bands. Generalized cross correlation (G C C) w h ich w eighted b y average m agnitude difference fu n ction(A M D F)was com puted in each sub-band. In fo rm a tio n o f tim e delay fro m sub-bands was fused in a w eighted average manner. Source three-dim ensional location estim ations were produced in a geom etric a lg o rith m based on the rectangle m icrophone array architecture. S im ulation results show th a t the correct rate o f the a lg o rith m based on sub-band is s ig n ifica n tly b e tter than the a lg o rith m based on full-band. Compared w ith the sub-band GCC a lg o rith m, the p roposed a lg o rith m has b e tter accuracy in reverberation situations.Key words:double sound source localiza tio n;sub-band processing;generalized cross c o rre la tio n;average m agnitude difference fu n c tio n;tim e delay estim ation〇引言传统的声源定位[1,2]方法适用于单声源定位,在理想的 环境下有较好的性能,然而,在多声源并存,环境噪声叠 加及混响的真实环境下,传统的算法无法实现定位,因此需要一种能在真实环境下具有较好鲁棒性的多声源定位算法。
目前针对多声源定位的算法大致可分为两种,一种算 法是在定位前先对声源进行分离,然后对单个目标声源进 行定位:如卓瑞阳提出的双通道定位与盲分离结合的噪声收稿日期:2016-11-11;修订日期:2017-02-20基金项目:国家自然科学基金项目(61371193、61303109);山西省自然科学基金项目(2014021022-6)作者简介:黄丽霞(1981-),女,山西运城人,博士,讲师,C C F会员,研究方向为声源定位、深度学习;昝丹斐(1992-),女,山西运 城人,硕士研究生,研究方向为声源定位;张晓丹(1991-),女,山西晋中人,硕士,5J F究方向为声源定位;+通讯作者:张雪英(1964-),女,河北行唐人,博士,教授,研究方向为信号与信息处理、大数据分析与处理;王洪翠(1980-),女,山东威海人,博士,讲师,研究 方向为信号与信息处理。
E-mail: szdftyut@l63. com•3042 •计算机工程与设计2017 年分离方法[3],运用了两种不同的技术,该算法比较复杂,而且当环境噪声差异较大时,需要及时调整盲源分离的相 关参数,对不同的环境的适应性较低;另一种算法是基于 子带分析的多声源定位:如倪志莲等提出的基于子带可控 响应功率的多声源定位算法[4]和Firoozabadi,Dehghan等 提出的基于广义互相关的子带分析多声源定位算法[5’6],这 种子带分析的算法将麦克风阵列接收到的信号映射到频域 的不同频段,避免了对声源的分离,可以直接获得多声源 各自的位置。
基于子带可控响应功率的算法需要大量的声 源和环境噪声频谱特性的先验知识,实际应用中很难获得,而且计算量较大,无法实现实时定位。
而对于Firoozabadi, Dehghan等提出的算法来说,子带中采用的时延估计算法 为传统的广义互相关(generalized cross correlation,GCC)算法,该算法在存在混响的情况下性能会下降。
因此,对 于噪声和混响存在情况下的多声源定位仍然是一个待解决 的难题。
本文选用第二种算法,主要研究提高在混响情况下两 声源同时发声时该算法的定位精度。
将广泛使用的GCC-P H A T算法作为本文提出算法的基础。
用平均幅度差函数 (average magnitude difference function,A M D F)的倒数对 GCC进行加权得到加权广义互相关(weighted generalized cross correlation,WCC)函数。
此外,考虑到语音信号在 频域的稀疏性[7],我们提出的算法将在每个子带上进行计 算。
子带分析的多声源定位是基于多个声源在频域子带的 能量分布不同。
本文提出的方法,首先将混合语音信号频 域分解为不同的子带,然后在每个子带中用A M D F的倒数 对GCC进行加权获得W C C函数,再通过融合各子带中的 W C C函数信息,可以得到各声源对应的时延估计值,最后 结合四元阵几何定位算法得到各声源的三维位置估计。
1基于子带分析的加权广义互相关算法1.1信号模型在室内环境下,用于声源定位的麦克风阵列接收到的 信号中除了有声源信号外,还包括房间混响和背景噪声。
为计算简便又不失一般性,本文只考虑两个声源同时发声 的情况。
则M元阵列中第7〃个麦克风7〃= (1,2,…,M)接收到的信号可由式(1)表示[4]2x m(n)=h m i (n)*5/ (n)+b m(n)(1)i=\式中:----第i个声源;K w)----第i个声源与第m个麦克风之间的房间脉冲响应;----房间背景噪声。
本文暂且不研究噪声对声源定位算法的影响,假定b m i n)=0〇1.2滤波器组的设计根据语音信号在频域的稀疏性,在两个声源同时发声 时,发出的声音片段在时域中会有重叠部分,但是一个时频段主要对应于其中一个声源(主要声源)的频谱内容。
即使有的频域段有超过一个声源发声时,不同声源的信号 能量在频域占据不同的离散频域集。
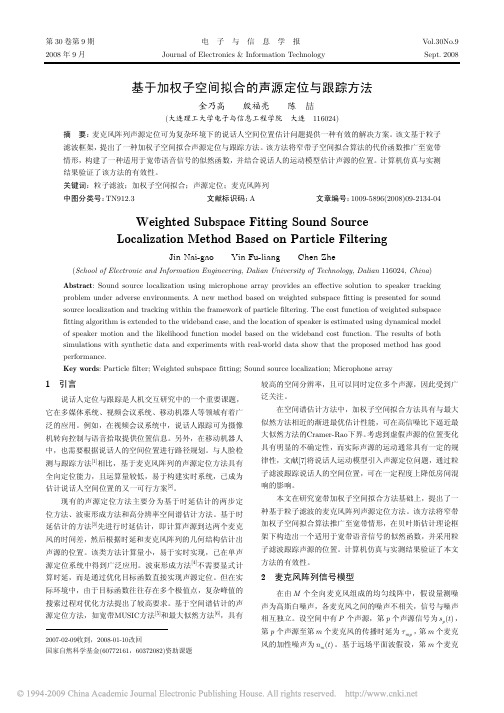
因此本文提出的方法 将麦克风接收到的信号划分为8个不同的频段(频段划分 较少时不能有效区分各信号)。
与I I R滤波器相比,F I R滤 波器具有线性相位特性,使得信号在传输时不会发生明显 的相位失真。
所以本文选用F I R滤波器对信号进行子带划 分。
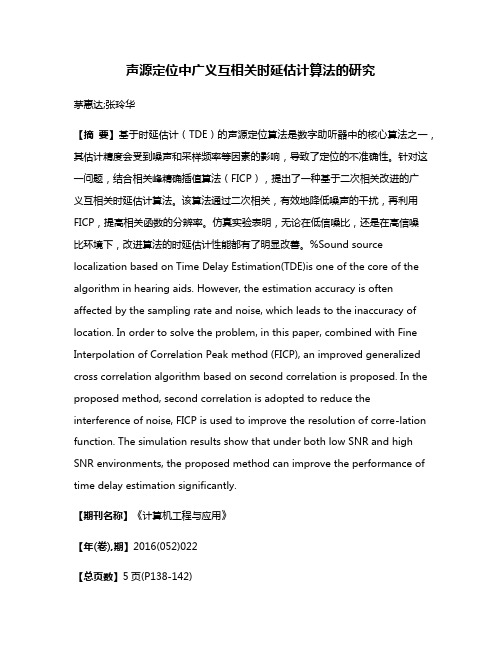
F I R滤波器的冲击函数/z(〃)的Z变换如式(2)表示N—1HCZ) =J]hO?)Z-n(2)n=0对应的频率响应表示为N-1H(e^!) =H(Z)\z^== \H(vu)\^(w)n=0(3)本文利用M A T L A B中的kaisei•窗函数设计了一组F IR 滤波器对双声源语音信号进行均匀子带划分。
如图1所示 为8通道F I R滤波器,图2所示为利用8通道F I R滤波器 进行均匀子带划分后部分子带中的信号时域、频域图,信 号采样频率为8 K H z。
图 1 8通道滤波器1.3时延估计1.3.1基于GC C的时延估计算法在时延估计算法中,最常用的是基于GCC的时延估计。
GCC函数如式(4)所示,其中5%(々)=£:(兄(々);(々))为 麦克风,和麦克风7接收信号的互功率谱;兄(々)为力(W)的短时傅里叶变换;*表示共轭;N为观测时间内所取信号的样点数,本次实验中N=256; ◎(々)为加权函数1N—1^G C c(p) =(k)^k/N(4)k=0常用的加权函数有R o th处理器、平滑相干变换权函 数、最大似然权函数、E cka rt权函数、相位变换(phase transform,P H A T)权函数等。