L13A享元模式(Flyweight
DJI 大疆悟空说明书
WooKong HELI用户手册V 1.8免责声明因使用本产品而造成的直接或间接损失与伤害,大疆创新概不负责。
本手册的阅读指南请严格遵守本手册要求将WooKong for Heli (WKH)安装到您的直升机,并安装WKH调参软件至您的电脑。
请注意手册中Lite 处所提醒的WKH和WKH Lite的区别。
DJI和WooKong为大疆创新所有的注册商标。
本文出现的产品名称、品牌等,均为其所属公司的商标或注册商标。
本产品及手册为大疆创新版权所有。
未经许可,不得以任何形式复制翻印。
使用本产品及手册不会追究专利责任。
文中图标解释:禁止参考页面配合遥控器调试需通过软件调试注意安装提示一般提示正确/ 错误目录本手册的阅读指南 (2)目录 (2)DJI WKH产品简介 (3)盒内物品清单 (4)初步安装连接 (5)A1准备工作 (5)A2安装到直升机上 (5)A3连线 (7)A4调参软件基本操作 (9)参数设置流程 (11)B1GPS与IMU安装 (11)B2控制模式切换开关 (12)B3无副翼 (13)B4十字盘 (14)B5总螺距与油门曲线设置 (14)B6锁尾 (14)B7发动机控制器 (16)B8遥控器校准 (17)B9系统检测 (18)B10自驾系统 (19)飞行 (20)C1数字指南针校准 (20)C2手动模式飞行测试 (20)C3失控保护 (21)C4自驾模式飞行测试 (22)产品维护 (24)固件升级 (24)产品信息 (24)附录 (25)WKH LED指示灯状态描述 (25)WKH Lite LED指示灯状态描述 (25)产品特性 (26)DJI WKH 产品简介WKH 是为专业象征机爱好者和玩家设计的飞控系统,他提供了自动平衡,定位,速度控制以及内嵌尾陀螺等功能。
无论是专业应用还是业余娱乐,它都能将用户从繁琐的操控压力中解放出来。
从小型电机到大型油机甚至涡喷直升机,WKH 自动驾驶系统均可适用。
APM Flight Modes 飞行模式介绍(超详细)

APM Flight Modes 飞行模式介绍概述多旋翼(直升机)一共有14 个内置的飞行模式,10个的常用的。
飞行模式可以通过遥控器控制,也可以通过GCS地面站进行发送命令更改遥控器和地面站都可以同时控制飞行模式,通常以最后一个命令为准推荐使用的飞行模式一般来讲,当第一次使用APM:Copter的时候,你应该依次使用下列飞行模式获得提高,要保证熟练了再进行下一个。
点击下方任意飞行模式可获得更多信息。
•Stabilize (增稳模式)•Alt Hold (定高模式、高度保持模式)•Loiter (悬停模式)•RTL (Return-to-Launch) (回家模式:返回起飞点)•Auto (自动模式:自动航点飞行,需要依靠GPS)其他飞行模式:•Acro 特技模式(没有飞控辅助增稳的模式)•AutoTune 自动微调(当飞机往一个严重偏的时候,可以执行自动微调)•Brake 刹车锁定模式(将飞机锁定在一个位置,而不受遥控器摇杆影响)•Circle 绕圈模式(绕着兴趣点画圈)•Drift 漂移模式•Guided 引导模式Guided_NoGPS 引导模式-不需要GPS•Land 降落模式•PosHold 定点模式•Sport 运动模块•Throw 抛飞模式(把无人机抛在空中,自动起飞稳定)•Follow Me 跟随模式(无人机跟着你飞行,但是需要GPS和手机地面站配合)•Simple and Super Simple (简单和超级简单模式)•Avoid_ADSB (基于ADSB的避让载人飞机模式。
需要外界ADSB模块)•大多数遥控器只有一个三段开关,所以只能设置三种模式。
如果需要设置6种模式,可以进行开关混控需要依赖GPS的飞行模式:有些飞行模式需要依赖GPS才能飞行,你可以通过状态灯或者地面站获知GPS 是否已经锁定。
以下飞行模式需要GPS锁定才能解锁飞行:•Loiter 悬停模式•RTL (Return-to-Launch) 回家模式•Auto 自动模式•Guided 引导模式•Drift 漂移模式•PosHold 定点模式•Follow Me 跟随模式•Circle 绕圈模式•Throw 抛飞模式不需要依赖GPS锁定的飞行模式:•Stabilize 自稳模式•Alt Hold 定高模式•Acro 特技模式•Sport 运动模式•Land 降落模式全部模式列表:(点击对应的模式查看详解)•Acro Mode•Altitude Hold Mode•Auto Mode•Brake Mode•Circle Mode•Drift Mode•Follow Me Mode (GSC Enabled)•Guided Mode•Land Mode•Loiter Mode•PosHold Mode•Position Mode•RTL Mode•Simple and Super Simple Modes•Sport Mode•Stabilize Mode•Throw ModeStabilize增稳模式概述:•飞手用roll与pitch操作控制飞行器的倾斜角度。
APM飞行模式解说
APM飞行模式注解ELEV是俯仰或升降 1通道对 PitchAILE是横滚或副翼 2通道对 RollTHRO是油门 3通道对 ThrottlRUDD是方向 4通道对 Yaw红正黑负白信号,红正棕负橙信号Pitch 俯仰 Roll 横滚 Throttl 油门 Yaw 方向1、稳定模式Stabilize稳定模式是使用得最多的飞行模式,也是最基本的飞行模式,起飞和降落都应该使用此模式。
此模式下,飞控会让飞行器保持稳定,是初学者进行一般飞行的首选,也是FPV第一视角飞行的最佳模式。
一定要确保遥控器上的开关能很方便无误地拨到该模式,应急时会非常重要。
2、比率控制模式Acro这个是非稳定模式,这时apm将完全依托遥控器遥控的控制,新手慎用。
3、定高模式ALT_HOLD定高模式(Alt Hold)是使用自动油门,试图保持目前的高度的稳定模式。
定高模式时高度仍然可以通过提高或降低油门控制,但中间会有一个油门死区,油门动作幅度超过这个死区时,飞行器才会响应你的升降动作当进入任何带有自动高度控制的模式,你目前的油门将被用来作为调整油门保持高度的基准。
在进入高度保持前确保你在悬停在一个稳定的高度。
飞行器将随着时间补偿不良的数值。
只要它不会下跌过快,就不会有什么问题。
离开高度保持模式时请务必小心,油门位置将成为新的油门,如果不是在飞行器的中性悬停位置,将会导致飞行器迅速下降或上升。
在这种模式下你不能降落及关闭马达,因为现在是油门摇杆控制高度,而非马达。
请切换到稳定模式,才可以降落和关闭马达。
4、自动模式 AUTO自动模式下,飞行器将按照预先设置的任务规划控制它的飞行由于任务规划依赖GPS的定位信息,所以在解锁起飞前,必须确保GPS已经完成定位(APM 板上蓝色LED常亮)切换到自动模式有两种情况:如果使用自动模式从地面起飞,飞行器有一个安全机制防止你误拨到自动模式时误启动发生危险,所以需要先手动解锁并手动推油门起飞。
起飞后飞行器会参考你最近一次ALT Hold 定高的油门值作为油门基准,当爬升到任务规划的第一个目标高度后,开始执行任务规划飞向目标;如果是空中切换到自动模式,飞行器首先会爬升到第一目标的高度然后开始执行任务6、悬停模式Loiter悬停模式是GPS定点+气压定高模式。
2022年系统分析师上午题带答案

上半年系统分析师考试上午真题(原则参照答案)卷面总分:75.0 分答题时间:150 分钟1、UML构造中旳公共机制是指达到特定目旳旳公共UML措施,其中()是事物语义旳细节描述,它是模型真正旳核心;()涉及约束、构造型和标记值。
A.规则阐明B.修饰C.公共分类D.扩展机制A.规则阐明B.修饰C.公共分类D.扩展机制试题分析:从总体上来看,UML旳构造涉及构造块、规则和公共机制三个部分。
(1)构造块。
UML有三种基本旳构造块,分别是事物(thing)、关系(relationship)和图(diagram)。
事物是UML旳重要构成部分,关系把事物紧密联系在一起,图是多种互相关联旳事物旳集合。
(2)公共机制。
公共机制是指达到特定目旳旳公共UML措施,重要涉及规格阐明(具体阐明)、修饰、公共分类(通用划分)和扩展机制四种。
规格阐明是事物语义旳细节描述,它是模型真正旳核心;UML为每个事物设立了一种简朴旳记号,还可以通过修饰来体现更多旳信息;UML涉及两组公共分类,分别是类与对象(类表达概念,而对象表达具体旳实体)、接口与实现(接口用来定义契约,而实现就是具体旳内容);扩展机制涉及约束(扩展了UML构造块旳语义,容许增长新旳规则或修改既有旳规则)、构造型(扩展UML旳词汇,用于定义新旳构造块)和标记值(扩展了UML构造块旳特性,容许创立新旳特殊信息来扩展事物旳规格阐明)。
(3)规则。
规则是构造块如何放在一起旳规定,涉及为构造块命名;给一种名字以特定含义旳语境,即范畴;如何使用或看见名字,即可见性;事物如何对旳、一致地互相联系,即完整性;运营或模拟动态模型旳含义是什么,即执行。
2、UML用关系把事物结合在一起,其所涉及旳四种关系中,()描述一组对象之间连接旳构造关系;()描述特殊元素旳对象可以替代一般元素旳对象。
A.依赖关系B.关联关系C.泛化关系D.实现关系A.依赖关系B.关联关系C.泛化关系D.实现关系试题分析:UML 用关系把事物结合在一起,重要有下列四种关系:(1)依赖(dependency)。
飞龙 wi
持续电流(散热良好)瞬间电流(散热良好)BEC尺寸(供参考)重量(供参考)20A 30A 40A 60A 30A 40A 55A 80A 锂电池型号79g 35g 36g 76g 49x23.5x13.5mm 65.5x34x21mm● 反推功能,支持飞行过程中切换电机正反向,达到减速目的(WinDragon wifi 80-130A 支持此功能)。
2-4S 2-4S 2-6S 2-6S 8.4V/7.4V/6V/5V ,5A 80A 100A 119g 2-6S 100A 120A 125g 2-6S 130A150A130g82.5x39.5x23.5mm2-6S航模无刷电子调速器WinDragon wifi 130AWinDragon wifi 100A WinDragon wifi 80A WinDragon wifi 60A WinDragon wifi 30A WinDragon wifi 40A WinDragon wifi 20A 8.4V/7.4V/6V/5V ,5A 8.4V/7.4V/6V/5V ,5A 8.4V/7.4V/6V/5V,5A8.4V/7.4V/6V/5V ,5A 82.5x39.5x23.5mm 82.5x39.5x23.5mm 65.5x34x21mm 49x23.5x13.5mm 02 产品规格04 操作说明1.正常工作模式2.油门行程设定3.通过遥控器进行参数编程设定推荐使用Flycolor Wi-Fi Trans 通过Flycolor App 进行参数编程设定。
另外可通过编程卡进行参数编程设定1. 刹车: [1] 无刹车 [2]软刹车 [3]重刹车 [4]很重刹车 (出厂默认值为无刹车)2.电池类型: [1]LiPo(锂电) [2] NiCb/NiMh(镍氢/镍隔) (默认值为Li Po )3.低压保护阈值:低/中/高 [1] 2.8V [2]3.0V [3]3.2V ;默认值为中(3.0V)对于Ni-xx电池组:低/中/高中止电压是电池组初始电压值的50%/65%/75%对于Li-xx电池组:可自动计算电池数量,除了确定电池 类型外无需用户设置。
avive 操作方法

avive 操作方法解密“Avive”:手把手教你玩转这神秘黑科技在我们生活的这个瞬息万变的科技时代,一款名为“Avive”的神器正在悄然改变我们的生活节奏。
这款集高效、便捷与智能于一身的操作系统,犹如一股清流,席卷而来,让众多极客和新手们纷纷为之侧目。
本文就带你深入探索Avive操作方法的奥秘,让你轻松上手,游刃有余。
首先,咱们得先聊聊Avive系统的启动过程,“一键启动,瞬息之间”,按下开机键那一刻,你就能感受到那种“如丝般顺滑”的启动体验。
那感觉就像是骑着火箭从地球直飞火星,眨眼间已身处未知的新世界。
哎呀妈呀,这种速度感和流畅度,真是让人欲罢不能!接下来,便是Avive的核心——界面操作。
“一图胜千言”,Avive采用的是直观且人性化的图形用户界面,图标设计鲜明亮丽,布局简洁有序,让人一眼看去,就像置身于一座精心设计的数字园林中。
只需轻轻一点,无论是打开应用、浏览文件还是设置参数,都能轻松实现,真正实现了“指哪打哪”的操作境界。
再者,Avive的一大亮点就是其智能化的语音助手功能。
“君子动口不动手”,对着Avive喊出你的需求,它便能快速响应并执行。
不管是查询天气、设定闹钟,还是播放音乐、发送信息,都只需要一句简单的口头指令,无需繁琐的手动操作,真正实现了“言出法随”的高科技生活体验。
对于数据管理这块,Avive更是有一套。
它内置的文件管理系统犹如一位贴心的管家,帮你把各类文件资料整理得井井有条。
只需轻点几下,无论是查找、移动、复制还是删除文件,都能迅速完成,让人不禁感叹:“这才是我梦寐以求的效率利器!”至于更新维护方面,Avive也是做足了功夫。
自动更新机制确保系统时刻保持最新状态,安全防护体系则为你的数据保驾护航。
每当有新的系统补丁或者功能升级,Avive都会悄无声息地完成,让你安心享受科技带来的便利,再也不用担心“后院起火”。
总而言之,Avive以其独特的魅力和卓越的性能,为我们开启了一扇通往未来的大门。
通用路由平台 VRP 说明书 QoS 分册
目录第1章 QoS简介.....................................................................................................................1-11.1 简介....................................................................................................................................1-11.2 传统的分组投递业务..........................................................................................................1-11.3 新业务引发的新需求..........................................................................................................1-21.4 拥塞的产生、影响和对策...................................................................................................1-21.4.1 拥塞的产生..............................................................................................................1-21.4.2 拥塞的影响..............................................................................................................1-31.4.3 对策.........................................................................................................................1-31.5 几种主要的流量管理技术...................................................................................................1-4第2章流量监管和流量整形配置............................................................................................2-12.1 简介....................................................................................................................................2-12.1.1 流量监管..................................................................................................................2-12.1.2 流量整形..................................................................................................................2-32.1.3 接口限速..................................................................................................................2-52.2 配置流量监管.....................................................................................................................2-62.2.1 建立配置任务...........................................................................................................2-62.2.2 配置流量监管列表....................................................................................................2-72.2.3 配置流量监管策略....................................................................................................2-72.2.4 检查配置结果...........................................................................................................2-72.3 配置流量整形.....................................................................................................................2-82.3.1 建立配置任务...........................................................................................................2-82.3.2 配置流量整形...........................................................................................................2-82.3.3 检查配置结果...........................................................................................................2-92.4 配置接口限速.....................................................................................................................2-92.4.1 建立配置任务...........................................................................................................2-92.4.2 配置接口限速.........................................................................................................2-102.4.3 检查配置结果.........................................................................................................2-102.5 配置举例...........................................................................................................................2-102.5.1 流量监管配置示例..................................................................................................2-102.5.2 流量整形配置示例..................................................................................................2-12第3章拥塞管理配置..............................................................................................................3-13.1 简介....................................................................................................................................3-13.1.1 拥塞管理策略...........................................................................................................3-13.1.2 拥塞管理技术的对比................................................................................................3-53.2 配置先进先出队列..............................................................................................................3-63.2.1 建立配置任务...........................................................................................................3-63.2.2 配置FIFO队列的长度.............................................................................................3-73.3 配置优先队列.....................................................................................................................3-73.3.1 建立配置任务...........................................................................................................3-73.3.2 配置优先列表...........................................................................................................3-83.3.3 配置缺省队列...........................................................................................................3-93.3.4 配置队列长度...........................................................................................................3-93.3.5 在接口上应用优先列表组.........................................................................................3-93.3.6 检查配置结果.........................................................................................................3-103.4 配置定制队列...................................................................................................................3-103.4.1 建立配置任务.........................................................................................................3-103.4.2 配置定制列表.........................................................................................................3-113.4.3 配置缺省队列.........................................................................................................3-113.4.4 配置队列长度.........................................................................................................3-123.4.5 配置各队列每次轮询发送的字节数........................................................................3-123.4.6 在接口上应用定制列表..........................................................................................3-123.4.7 检查配置结果.........................................................................................................3-133.5 配置加权公平队列............................................................................................................3-133.5.1 建立配置任务.........................................................................................................3-133.5.2 配置加权公平队列..................................................................................................3-143.5.3 检查配置结果.........................................................................................................3-143.6 配置RTP队列..................................................................................................................3-143.6.1 建立配置任务.........................................................................................................3-143.6.2 在接口上应用RTP队列.........................................................................................3-153.6.3 配置最大预留带宽..................................................................................................3-163.6.4 检查配置结果.........................................................................................................3-163.7 优先队列配置举例............................................................................................................3-16第4章拥塞避免配置..............................................................................................................4-14.1 简介....................................................................................................................................4-14.2 配置WRED........................................................................................................................4-34.2.1 建立配置任务...........................................................................................................4-34.2.2 启用WRED............................................................................................................4-44.2.3 配置WRED计算平均队长的指数............................................................................4-44.2.4 配置WRED各优先级参数.......................................................................................4-44.2.5 检查配置结果...........................................................................................................4-5第5章基于类的QoS配置.....................................................................................................5-15.1 简介....................................................................................................................................5-15.1.1 流分类......................................................................................................................5-25.1.2 标记.........................................................................................................................5-25.1.3 DSCP......................................................................................................................5-35.1.4 标准的PHB.............................................................................................................5-35.1.5 基于类的队列CBQ(Class Based Queue)..........................................................5-4 5.2 配置流分类.........................................................................................................................5-45.2.1 建立配置任务...........................................................................................................5-45.2.2 在类视图中定义匹配类的规则.................................................................................5-55.2.3 检查配置结果...........................................................................................................5-6 5.3 配置基于类的标记动作.......................................................................................................5-75.3.1 建立配置任务...........................................................................................................5-75.3.2 配置标记报文的DSCP值........................................................................................5-85.3.3 配置标记报文的IP优先级值...................................................................................5-85.3.4 配置标记FR报文的DE标志位的值........................................................................5-85.3.5 配置标记ATM信元的CLP标志位的值...................................................................5-85.3.6 配置标记MPLS EXP域的值...................................................................................5-95.3.7 配置标记VLAN优先级8021P的值.........................................................................5-9 5.4 配置基于类的流量监管和流量整形动作.............................................................................5-95.4.1 建立配置任务...........................................................................................................5-95.4.2 配置基于类的流量监管动作...................................................................................5-105.4.3 配置基于类的流量整形动作...................................................................................5-105.4.4 检查配置结果.........................................................................................................5-11 5.5 配置基于类的流量限速动作..............................................................................................5-115.5.1 建立配置任务.........................................................................................................5-115.5.2 配置基于类的流量限速动作...................................................................................5-125.5.3 检查配置结果.........................................................................................................5-12 5.6 配置CBQ动作.................................................................................................................5-125.6.1 建立配置任务.........................................................................................................5-125.6.2 配置AF..................................................................................................................5-135.6.3 配置WFQ..............................................................................................................5-135.6.4 配置最大队列长度..................................................................................................5-145.6.5 配置EF.................................................................................................................5-145.6.6 检查配置结果.........................................................................................................5-14 5.7 配置基于类的WRED动作...............................................................................................5-155.7.1 建立配置任务.........................................................................................................5-155.7.2 配置基于类的WRED丢弃方式.............................................................................5-155.7.3 配置基于类的WRED的丢弃参数.........................................................................5-165.7.4 检查配置结果.........................................................................................................5-16 5.8 配置流量策略...................................................................................................................5-175.8.1 建立配置任务.........................................................................................................5-175.8.2 定义策略并进入策略视图.......................................................................................5-175.8.3 为流分类指定流动作..............................................................................................5-185.8.4 检查配置结果.........................................................................................................5-185.9 配置策略嵌套动作............................................................................................................5-185.9.1 建立配置任务.........................................................................................................5-185.9.2 配置策略嵌套动作.................................................................................................5-195.9.3 检查配置结果.........................................................................................................5-205.10 应用策略.........................................................................................................................5-205.10.1 建立配置任务.......................................................................................................5-205.10.2 应用策略..............................................................................................................5-215.10.3 检查配置结果.......................................................................................................5-215.11 调试CBQ.......................................................................................................................5-215.12 配置举例.........................................................................................................................5-225.12.1 基于类的队列配置举例........................................................................................5-225.12.2 策略嵌套配置举例...............................................................................................5-26第6章 QPPB配置..................................................................................................................6-16.1 简介....................................................................................................................................6-16.2 配置QPPB.........................................................................................................................6-26.2.1 建立配置任务...........................................................................................................6-26.2.2 配置路由策略...........................................................................................................6-36.2.3 应用路由策略...........................................................................................................6-46.2.4 定义类及类的匹配规则............................................................................................6-46.2.5 配置基于类的动作....................................................................................................6-46.2.6 定义流量策略...........................................................................................................6-46.2.7 在接口下应用流量策略............................................................................................6-46.2.8 在接口下应用QPPB................................................................................................6-56.2.9 检查配置结果...........................................................................................................6-56.3 QPPB配置举例..................................................................................................................6-56.4 故障排除...........................................................................................................................6-11第7章链路效率机制配置.......................................................................................................7-17.1 简介....................................................................................................................................7-17.1.1 IP报文头压缩..........................................................................................................7-17.1.2 链路分片与交叉.......................................................................................................7-27.2 配置IP报文头压缩.............................................................................................................7-37.2.1 建立配置任务...........................................................................................................7-37.2.2 启动IP头压缩........................................................................................................7-47.2.3 配置TCP头压缩的最大连接数................................................................................7-47.2.4 配置RTP头压缩的最大连接数................................................................................7-57.2.5 检查配置结果...........................................................................................................7-57.3 配置链路分片和交叉..........................................................................................................7-57.3.1 建立配置任务...........................................................................................................7-57.3.2 使能LFI..................................................................................................................7-67.3.3 配置LFI分片的最大时延........................................................................................7-67.3.4 配置MP绑定带宽....................................................................................................7-67.3.5 启动VT接口动态QoS的限速功能.........................................................................7-77.4 维护....................................................................................................................................7-77.4.1 调试IP头压缩.........................................................................................................7-77.4.2 清空压缩运行信息....................................................................................................7-8第8章帧中继QoS配置.........................................................................................................8-18.1 简介....................................................................................................................................8-18.1.1 帧中继class............................................................................................................8-28.1.2 实现的帧中继QoS...................................................................................................8-28.2 配置帧中继流量整形..........................................................................................................8-58.2.1 建立配置任务...........................................................................................................8-58.2.2 配置帧中继流量整形参数.........................................................................................8-68.2.3 将整形参数应用到接口............................................................................................8-78.2.4 使能帧中继流量整形................................................................................................8-78.3 配置帧中继流量监管..........................................................................................................8-88.3.1 建立配置任务...........................................................................................................8-88.3.2 配置帧中继流量监管参数.........................................................................................8-98.3.3 将流量监管参数应用到接口.....................................................................................8-98.3.4 使能帧中继流量监管................................................................................................8-98.4 配置帧中继接口的拥塞管理..............................................................................................8-108.4.1 建立配置任务.........................................................................................................8-108.4.2 配置帧中继接口的拥塞管理策略............................................................................8-108.5 配置帧中继虚电路的拥塞管理..........................................................................................8-118.5.1 建立配置任务.........................................................................................................8-118.5.2 配置帧中继虚电路的拥塞管理策略........................................................................8-128.5.3 配置虚电路的DE规则...........................................................................................8-128.5.4 将拥塞策略应用到虚电路.......................................................................................8-138.6 配置帧中继通用队列........................................................................................................8-138.6.1 建立配置任务.........................................................................................................8-138.6.2 配置帧中继通用队列..............................................................................................8-148.6.3 将通用队列应用到帧中继接口...............................................................................8-158.6.4 将通用队列应用到帧中继虚电路............................................................................8-158.6.5 检查配置结果.........................................................................................................8-158.7 配置帧中继PVC PQ队列................................................................................................8-168.7.1 建立配置任务.........................................................................................................8-168.7.2 配置帧中继接口的PVC PQ队列...........................................................................8-168.7.3 配置帧中继虚电路PVC PQ队列等级....................................................................8-178.8 配置帧中继分片................................................................................................................8-188.8.1 建立配置任务.........................................................................................................8-188.8.2 配置帧中继分片.....................................................................................................8-198.8.3 将帧中继分片应用到虚电路...................................................................................8-198.8.4 检查配置结果.........................................................................................................8-198.9 调试帧中继QoS...............................................................................................................8-208.10 配置举例.........................................................................................................................8-208.10.1 帧中继流量整形配置举例.....................................................................................8-208.10.2 帧中继分片配置举例............................................................................................8-22第9章 ATM QoS配置............................................................................................................9-19.1 简介....................................................................................................................................9-19.2 配置ATM PVC的拥塞管理................................................................................................9-29.2.1 建立配置任务...........................................................................................................9-29.2.2 配置ATM PVC的FIFO队列...................................................................................9-39.2.3 配置ATM PVC的CQ队列.....................................................................................9-49.2.4 配置ATM PVC的PQ队列......................................................................................9-49.2.5 配置ATM PVC的WFQ队列..................................................................................9-49.2.6 应用CBQ................................................................................................................9-49.2.7 配置ATM PVC的RTPQ队列.................................................................................9-59.2.8 配置ATM PVC的预留带宽.....................................................................................9-59.3 配置ATM PVC的拥塞避免................................................................................................9-59.3.1 建立配置任务...........................................................................................................9-59.3.2 配置ATM PVC的拥塞避免.....................................................................................9-69.4 配置ATM接口的流量监管.................................................................................................9-79.4.1 建立配置任务...........................................................................................................9-79.4.2 配置ATM接口的流量监管.......................................................................................9-79.5 配置ATM接口基于类的策略..............................................................................................9-89.5.1 建立配置任务...........................................................................................................9-89.5.2 配置ATM接口基于类的策略...................................................................................9-99.6 配置PVC业务映射............................................................................................................9-99.6.1 建立配置任务...........................................................................................................9-99.6.2 配置PVC-Group内PVC的IP优先级..................................................................9-109.6.3 为PVC-Group内创建的PVC配置流量参数.........................................................9-109.7 Multilink PPPoA QoS配置...............................................................................................9-119.7.1 建立配置任务.........................................................................................................9-119.7.2 创建Multilink PPPoA虚拟接口模板......................................................................9-129.7.3 创建PPPoA虚拟接口模板并绑定到Multilink PPPoA...........................................9-129.7.4 配置PPPoA应用...................................................................................................9-129.7.5 在Multilink PPPoA虚拟接口模板上应用QoS策略...............................................9-129.7.6 重启PVC...............................................................................................................9-139.8 配置举例...........................................................................................................................9-139.8.1 ATM PVC上的CBQ配置举例..............................................................................9-13。
享元模式FlyWeight详解

享元模式模式描述:享元模式以共享的方式高效地支持大量的细粒度对象;享元对象能做到共享的关键是区分内蕴状态和外蕴状态:☐内蕴状态Internal State是存储在享元对象内部并且不会随环境改变而改变;因此内蕴状态并可以共享;☐外蕴状态External State是随环境改变而改变的、不可以共享的状态;享元对象的外蕴状态必须由客户端保存,并在享元对象被创建之后,在需要使用的时候再传入到享元对象内部;外蕴状态与内蕴状态是相互独立的;名称:享元模式Flyweight,Flyweight在拳击比赛中指最轻量级,即"蝇量级",有些作者翻译为"羽量级";这里使用"享元模式"更能反映模式的用意;计算模型:享元模式可以分为单纯享元模式和复合享元模式:一、单纯享元模式结构图:单纯享元模式构成说明:1)抽象享元Flyweight角色:此角色是所有的具体享元类的超类,为这些类规定出需要实现的公共接口;那些需要外蕴状态External State的操作可以通过调用商业方法以参数形式传入;2)具体享元ConcreteFlyweight角色:实现抽象享元角色所规定的接口;如果有内蕴状态的话,必须负责为内蕴状态提供存储空间;享元对象的内蕴状态必须与对象所处的周围环境无关,从而使得享元对象可以在系统内共享的;3)享元工厂FlyweightFactory角色:本角色负责创建和管理享元角色;本角色必须保证享元对象可以被系统适当地共享;当一个客户端对象调用一个享元对象的时候,享元工厂角色会检查系统中是否已经有一个复合要求的享元对象;如果已经有了,享元工厂角色就应当提供这个已有的享元对象;如果系统中没有一个适当的享元对象的话,享元工厂角色就应当创建一个合适的享元对象;4)客户端Client角色:需要维护一个对所有享元对象的引用;需要自行存储所有享元对象外蕴状态;二、复合享元模式结构图:复合享元模式构成说明:1)抽象享元角色:此角色是所有的具体享元类的超类,为这些类规定出需要实现的公共接口;那些需要外蕴状态External State的操作可以通过方法的参数传入;抽象享元的接口使得享元变得可能,但是并不强制子类实行共享,因此并非所有的享元对象都是可以共享的;2)具体享元ConcreteFlyweight角色:实现抽象享元角色所规定的接口;如果有内蕴状态的话,必须负责为内蕴状态提供存储空间;享元对象的内蕴状态必须与对象所处的周围环境无关,从而使得享元对象可以在系统内共享;有时候具体享元角色又叫做单纯具体享元角色,因为复合享元角色是由单纯具体享元角色通过复合而成的;3)复合享元UnsharableFlyweight角色:复合享元角色所代表的对象是不可以共享的,但是一个复合享元对象可以分解成为多个本身是单纯享元对象的组合;复合享元角色又称做不可共享的享元对象;4)享元工厂FlyweightFactoiy角色:本角色负责创建和管理享元角色;本角色必须保证享元对象可以被系统适当地共享;当一个客户端对象请求一个享元对象的时候,享元工厂角色需要检查系统中是否已经有一个符合要求的享元对象,如果已经有了,享元工厂角色就应当提供这个已有的享元对象;如果系统中没有一个适当的享元对象的话,享元工厂角色就应当创建一个新的合适的享元对象;5)客户端Client角色:本角色还需要自行存储所有享元对象的外蕴状态;配置约束:享元模式应用的条件如下:1.一个系统有大量的对象;2.这些对象耗费大量的内存;3.这些对象的状态中的大部分都可以外部化;4.这些对象可以按照内蕴状态分成很多的组,当把外蕴对象从对象中剔除时,每一个组都可以仅用一个对象代替;5.软件系统不依赖于这些对象的身份,换言之,这些对象可以是不可分辨的;特点:享元模式的优点:大幅度地降低内存中对象的数量;享元模式的缺点:1:享元模式使得系统更加复杂;为了使对象可以共享,需要将一些状态外部化,这使得程序的逻辑复杂化;2:享元模式将享元对象的状态外部化,而读取外部状态使得运行时间稍微变长;总结:享元模式一般是解决系统性能问题的,所以经常用于底层开发,在项目开发中并不常用;不变式:1.存在一个享元工厂角色,负责创建和管理享元角色;2.存在一个抽象享元角色,作为所有具体享元类的超类,为这些类规定出需要实现的公共接口;3.存在一个或多个具体享元角色,实现抽象享元角色所规定的接口;代码:单纯享元模式:terator;;{e=;fly=Flyweight;extrinsicState;}}}public class FlyweightFactory{private HashMap flies=new HashMap;public FlyweightFactory { }.."<<intrinsicState<<endl;}~ConcreteFlyweight{}void Operationconst string & extrinsicState{cout<<"ConcreteFlyweight:内蕴"<<this->GetIntrinsicState<<"ConcreteFlyweight:外蕴"<<extrinsicState<<endl;}};class FlyweightFactory{public:FlyweightFactory{}~FlyweightFactory{}Flyweight GetFlyweightconst string &key{vector<Flyweight >::iterator it = ;for;it = ; it++{if it->GetIntrinsicState == keycout<<"already created by users..."<<endl;return it;}Flyweight fn = new ConcreteFlyweightkey;fn;return fn;}private:vector<Flyweight> _fly;};int main{FlyweightFactory fc = new FlyweightFactory;Flyweight fw1 = fc->GetFlyweight"hello";Flyweight fw2 = fc->GetFlyweight"world";Flyweight fw3 = fc->GetFlyweight"hello";}典型应用:一、享元模式在编辑器系统中大量使用;一个文本编辑器往往会提供很多种字体,而通常的做法就是将每一个字母做成一个享元对象;享元对象的内蕴状态就是这个字母,而字母在文本中的位置和字模风格等其他信息则是外蕴状态;比如,字母a可能出现在文本的很多地方,虽然这些字母a的位置和字模风格不同,但是所有这些地方使用的都是同一个字母对象;这样一来,字母对象就可以在整个系统中共享;二、享元模式在 Framework中的应用;String 无论在还是 Java中,都是一个特殊的引用对象;我们可以试想,出现了这样一段代码:String s=”Hello world”;String s1=”Hello world”;那么是不是每次都要重新的去申请一块内存,然后去保存这个字符串呢那么这样的话是不是会效率很低呢因为我们知道,字符串在实际使用中往往都是非常短暂的;他们通常是被读出来之后,便直接展示给了客户;然后这个字符串的生命结束,变成垃圾;在和 Java中,String都被以不变模式来进行设计;我们来简单的分析一下String的驻留机制:在CLR 被加载之后,就会在SystemDomain的托管堆中去建立一个HashTable来维护String;于是模拟代码如下:伪代码也就是说,我是在模拟一个string s=”Hello world”的过程;过程是,首先,他先去找Hashtable中目前是否存有Key为”Hello world”的项;如果不存在,那么就分配一块堆内存,存储这字符串,然后将地址作为Value,存储在Hashtable中;如果存在的话,那么便直接找到该字符串所对应的地址,然后取出地址中的值;用一个Hashtable来控制String对象的数量;。
HOBBYWING 30A 无刷电调使用说明书

有以下几种恢复出厂参数方法:1)利用SET键恢复出厂设置,方法如下:在油门扳机处于中点位置时,持续按住 SET 键约8秒,红绿灯同时闪烁,则表示恢复出厂设置成功,需重新上电方可运行。
2)利用LED参数设定卡恢复出厂设置:LED设定卡与电调连通后,按下“RESET”键,然后再按下“OK”保存,即可恢复出厂设置。
3)利用LCD G2设定盒恢复出厂设置:LCD G2设定盒与电调连通后,通过“ITEM”选项选到“Restore Default”项,然后按下“OK(R/P)”按键保存,即可恢复出厂设置。
4)利用OTA蓝牙模块恢复出厂设置:OTA模块与电调连通后,进入【参数设定】项目,点击“重置”按钮即可恢复出厂设置。
1. 打开遥控器,将油门通道的“D/R”、“EPA”、“ATL”等参数调到03产品特色02注意事项恢复出厂参数设定507电调状态指示灯说明08故障快速处理01声明请参照接线说明及接线图正确接线:1. 连接电机:连接有感无刷马达与无感无刷马达的方式有差异,请务必遵照如下接线方式: A. 连接有感无刷马达时:电调与马达相连有严格的线序要求,电调的#A/#B/#C必须与电机的#A/#B/#C三线严格一一对应,然后将电调与电机的感应线按照感应接口上的箭头标识对接起来。
备注: 若装上电机后,车子前进与后退反向,请更改参数项第4 项“电机转动方向”,实现电机转向调整。
B. 连接无感无刷马达时:电调与马达相连无严格的线序要求,电调的#A/#B/#C可以与电机的三线随意对接,若出现转向相反,任意交换两条马达线。
2. 连接接收机:将电调的油门控制线接入接收机的油门通道(即TH通道)。
因油门线中的红色输出6V/7.4V/8.4V电压给接收机及舵机,所以请勿给接收机额外供电,若需要额外供电,请断开电调 油门线中的红色线。
3. 连接电池:电调的输入线有极性之分,接入电池时,请确保电调的(+)极与电池的(+)极相连,(-)与(-)相连。
ia3原理

ia3原理
IA3(论文:Few-Shot Parameter-Efficient Fine-Tuning is Better and Cheaper than In-Context Learning)通过学习向量来对激活层加权进行缩放,从而获得更强的性能,同时仅引入相对少量的新参数。
其处理过程为:
1. 学习向量:通过抑制和放大内部激活注入适配器,使用学习向量重新调整内部激活。
2. 注入学习向量:将学习到的向量注入到典型的基于Transformer的架构中的注意力和前馈模块中。
3. 冻结原始权重:原始的预训练权重保持冻结状态,这些学习到的向量是微调期间唯一可训练的参数。
IA3通过大幅减少可训练参数的数量,使微调更加高效。
对于T0模型,使用IA3只有大约0.01%的可训练参数,而使用LoRA有>0.1%的可训练参数。
原始的预训练权重保持冻结状态,这意味着可以拥有多个轻量级、便携式IA3模型,用于在其之上构建的各种下游任务。
使用IA3微调的模型的性能与完全微调的模型的性能相当,且不会增加任何推理延迟。
P3A航模动作分析

P3A航模动作分析在航模爱好者中,P3A航模是颇受欢迎的一款机型。
它以其出色的性能和稳定的飞行特点而备受称赞。
本文将对P3A航模的动作进行详细分析,旨在帮助航模爱好者更好地了解和掌握该机型的飞行技巧。
一、起飞动作起飞是每一次飞行的开始,也是P3A航模飞行中最基础的动作之一。
在起飞前,飞行员需要确保航模的电池电量充足,所有的零件完好无损,并且避免起飞区域有障碍物。
起飞动作可分为以下几个步骤:1. 确保电池安装牢固:将充好电的电池安装在航模上,并确保其连接牢固,以免在飞行中掉落。
2. 航模校准:在起飞前,应对航模进行校准,确保其水平飞行时保持平衡。
校准包括校准水平、校准磁力计等。
3. 飞行区域检查:在起飞前,需要检查飞行区域,确保没有人或障碍物可能妨碍起飞和飞行。
4. 逐渐增加油门:开始起飞时,应将油门缓慢加大,使航模逐渐离地。
二、飞行动作P3A航模具备多种飞行动作,可以适应不同的飞行需求和场景。
以下是一些常见的飞行动作:1. 直线飞行:直线飞行是最基本的飞行动作之一,也是初学者需要掌握的基本操作。
飞行员可以通过控制油门和操纵杆,使航模平稳地做直线飞行。
2. 转弯飞行:转弯飞行能够让航模在空中灵活变换方向。
飞行员可以通过操纵杆控制航模的转向,实现平稳精准的转弯飞行。
3. 上升和下降:飞行员可以通过控制油门,使航模在空中上升或下降。
这一动作可以适应不同的高度需求,例如拍摄航拍照片或视频时,需要在一定高度上飞行。
4. 翻滚和翻转:P3A航模还具备翻滚和翻转的能力,可以通过飞行员的操控实现。
这些动作需要飞行员具备较高的飞行技巧和经验。
三、降落动作降落是每一次飞行的结束,也是一项需要技巧和耐心的动作。
以下是降落的基本步骤:1. 选择合适的降落点:在降落前,飞行员应该选择一个平坦、无障碍物的合适降落点。
2. 减小油门:在降落前,飞行员需要逐渐减小油门,降低航模的飞行高度。
3. 控制降落速度:通过控制油门和操纵杆,飞行员可以控制航模的降落速度,使其平稳降落。
SVP3000 Alphaplus智能风险值定位器模型AVP300和AVP301说明书
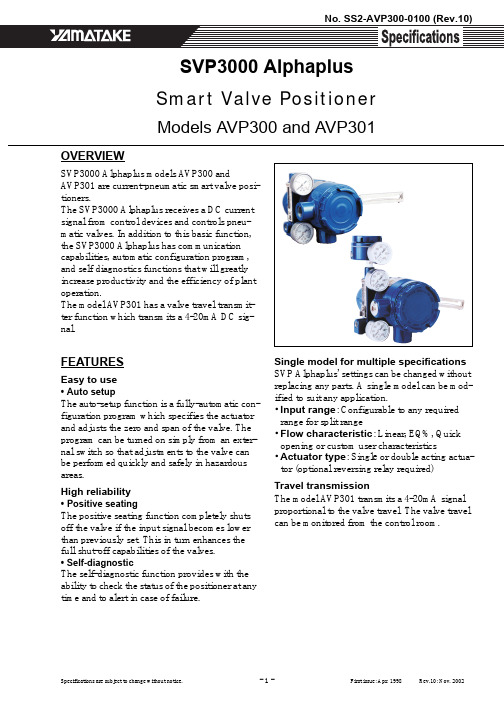
Specifications are subject to change without notice.- 1 -First issue: Apr. 1998Rev.10: Nov. 2002Smart Valve PositionerModels AVP300 and AVP301OVERVIEWSVP3000 Alphaplus models A VP300 andA VP301 are current-pneumatic smart valve posi-tioners.The SVP3000 Alphaplus receives a DC current signal from control devices and controls pneu-matic valves. In addition to this basic function, the SVP3000 Alphaplus has communication capabilities, automatic configuration program, and self diagnostics functions that will greatly increase productivity and the efficiency of plant operation.The model A VP301 has a valve travel transmit-ter function which transmits a 4-20mA DC sig-nal.FEATURESEasy to use•Auto setupThe auto-setup function is a fully-automatic con-figuration program which specifies the actuator and adjusts the zero and span of the valve. The program can be turned on simply from an exter-nal switch so that adjustments to the valve can be performed quickly and safely in hazardous areas.High reliability•Positive seatingThe positive seating function completely shuts off the valve if the input signal becomes lower than previously set. This in turn enhances the full shut-off capabilities of the valves.•Self-diagnosticThe self-diagnostic function provides with the ability to check the status of the positioner at any time and to alert in case of failure.Single model for multiple specifications SVP Alphaplus' settings can be changed without replacing any parts. A single model can be mod-ified to suit any application.•Input range : Configurable to any required range for split range•Flow characteristic : Linear, EQ%, Quick opening or custom user characteristics • Actuator type : Singl e or double acting actua-tor (optional reversing relay required)Travel transmissionThe model A VP301 transmits a 4-20mA signal proportional to the valve travel. The valve travel can be monitored from the control room.No. SS2-AVP300-0100 (Rev.10)Yamatake Corporation- 2 -FUNCTIONAL SPECIFICATIONSApplicable actuatorSingle and double acting actuator Linear and rotary motion actuatorApprovalsJIS Flameproof approvalEx d IIC T6 X Approval No. C13270FM Explosionproof approvalExplosionproof for Class I, Division 1, Group A, B, C, DDust-ignition for Class II, Division 1, Group E, F, G Suitable for Class III, Division 1Flameproof for Class I, Zone 1, AEx d IIC T6 at Ambient temperature<80°C Approval no. 3001246Installation should comply with NEC.FM Intrinsically safe approvalIntrinsically safe for Class I, II, III, Division 1, Group A, B, C, D, E, F, G, T4Intrinsically safe for Class I, Zone 0, AEx ia IIC T4Nonincendive for Class I, Division 2, Group A, B, C, D, T5Suitable for Class II, III, Division 2, Group F, G, T4Approval No. 3006126The barriers should be FM recognized types and comply with the following conditions as follows.Input signal line:12.02≤Vmax ≤30V , Imax=100mA,Pmax=1W, Ci=0.0uF, Li=0.22mHFor travel transmission line: Vmax=30V ,Imax=100mA, Pmax=1W, Ci=0.07uF, Li=0.22mHInstallation should comply with NEC.ISSeP/CENELEC Flameproof approvalEEx d IIC T6, IEC IP66Flameproof cable gland and stopping plug should be an approved model of EEx d IIC. Cable gland must be equivalent to IP66 standard.CSA Explosionproof approvalExplosionproof for Class I, Division 1, Group B, C, and DFlameproof for Class I, zone 1, Ex d IIC, T6Dust ignition proof for Class II and III Division 1, Group E, F and G Type 4X, Approval No. 188352-2500004029, LR113752-6KEMA/CENELEC Intrinsically safe approvalIntrinsic safety:II 1 G EEx ia IIC T4Dust ignition protection:II 1 D T135 °C Approval No. KEMA 00ATEX1111 XThe barriers should be CENELEC certified types and comply with the following condition as follows.•Model A VP300:Input circuit (terminals ±IN )Ui=30V , li=100mA (resistively limited), Pi=1W, Ci=1nF, Li=0.2mHOutput circuit (terminals ±OUT )Ui=30V , li=100mA (resistively limited), Pi=1W, Ci=1nF, Li=0.3mHBoth circuits shall be considered to be connected to ground from a safety point of view.•Model A VP301:Input circuit (terminals ±IN )Ui=30V , li=100mA (resistively limited), Pi=1W, Ci=1nF, Li=0.2mHOutput circuit (terminals ±OUT )Ui=30V , li=100mA (resistively limited), Pi=1W, Ci=1nF, Li=0.2mHBoth circuits shall be considered to be connected to ground from a safety point of view.NEPSI Flameproof approvalEx d IIC T6 (except acetylene), with NEPSI Dust igni-tion DIP DT T13Approval No. GYJ99101Flameproof cable gland must be an approved model of NEPSI Ex d IIC.NEPSI Intrinsically safe approvalEx ia IIC T4-T6 (with NEPSI Dust Ignition DIP DT T13Approval No. GYJ99104It must be used with the following Zener barrier which is approved by NEPSI.A VP300:Two pieces of each MTL728, Z728 or LB928A VP301:For input signal; Two pieces of each MTL728,Z728 or LB928For travel transmission: MTL787S, Z787 or LB987S Capacitance of wiring should be lower than 0.06uF.Inductance of wiring should be lower than 1mH. A cable gland which is NEPSI recognized is recommended.Combination of NEPSI Flameproof and Intrinsically safeWhen used as NEPSI Flameproof, it complies NEPSI Flameproof approval as above,When used as NEPSI Intrinsically safe, it complies NEPSI Intrinsically safe approval as above.Control signal input4-20mA DC (Configurable any required range for split range.)Input resistance300 Ω max / 20mA DCOutput characteristics•Linear, Equal percentage, Quick opening •Custom Configurable- 15 segmentsStem travel rangeFeedback Lever Angle ± 4° to ± 20°Bypass operationAuto/Manual external switch (For single acting type only)Air supply pressure140 to 700 kPa (1.4 to 7.0 kgf/cm 2)Yamatake Corporation No. SS2-AVP300-0100 (Rev.10)- 3 -Air consumption4 l /min(N) maximum at 140 kPa (1.4 kgf/cm 2)5 l /min(N) maximum at 280 kPa (2.8 kgf/cm 2)6 l /min(N) maximum at 500 kPa (5.0 kgf/cm 2)10 l /min(N) maximum at 400k Pa (4.0 kgf/cm 2) for dou-ble acting typeMaximum air deliver flowrate110 l /min(N) at 140 kPa (1.4 kgf/cm 2)250 l /min(N) at 400 kPa (4.0 kgf/cm 2) for double acting typeOutput balanced pressure55 ± 5% for double acting type onlyLightning protectionPeak value of voltage surge: 12 kV Peak value of current surge: 1000 AVibration tolerance2G (5 to 400 Hz)(with standard mounting kit on Yamatake HA actuator)Ambient temperature limits-40°C to 80°C for general model JIS Flameproof model :-20°C to 60°C FM Explosionproof :-40°C to 80°C FM Intrinsically safe :-40°C to 80°C ISSeP/CENELEC Flameproof :-20°C to 70°C CSA Explosionproof :-40°C to 80°C KEMA/CENELEC Intrinsically safe: -40°C to 60°C NEPSI Flameproof :-40°C to 80°C NEPSI Intrinsically safe For Ex ia IIC T6:-40°C to 40°C For Ex ia IIC T5:-40°C to 60°C For Ex ia IIC T4:-40°C to 80°CAmbient humidity limits10% to 90% RHCE conformityElectromagnetic compatibilityEN50081-2 and EN50082-2 (CE Marking)Configuration toolsSFC160 or SFC260 (SFC Smart Field Communicator,Software version 7.5 or newer)PERFORMANCE SPECIFICATIONSAccuracyFor 8mA ≤ input signal span< 16mA± 1% F.S. (± 2.5% with custom output characteristics)For 4mA ≤ input signal span< 8mA ± 1.5% F.S.Travel transmission accuracy± 1% F.S. (±2.5% with output characteristics modifica-tion)PHYSICAL SPECIFICATIONSEnclosure classificationJIS C0920 watertight, NEMA type 4X, IP66FinishBaked acrylicColorDark blueMaterialCast aluminumWeightFor single acting type:Without Pressure regulator with filter : 2.5 kg With Pressure regulator with filter : 3.2 kg For double acting type:Without Pressure regulator with filter : 2.8 kg With Pressure regulator with filter : 3.5 kgNo. SS2-AVP300-0100 (Rev.10)Yamatake Corporation INSTALLATIONAir connectionsRc1/4 or 1/4NPT internal threadElectrical connectionsG1/2, 1/2NPT or M20×1.5For travel transmission, additional wiring for the power supply is required.Conditions of supply airParticlesMaximum diameter 3µmOil mistNone acceptableDew point10°C below ambient temperatureTypical installationFigure 1 shows wiring for the model A VP300 (Smart positioner without travel transmission). In this case, you can connect a SVP to its terminal for communications.Figure 2 shows wiring for the model A VP301 (Smart positioner with travel transmission). In this case, you can connect a SVP anywhere along the travel transmission wiring for communications.Note)*1: For load resistance, refer to Figure 3.- 4 -Yamatake Corporation No. SS2-AVP300-0100 (Rev.10)Note)Supply voltage shall be limited to 45 V DC*2. Load resistance = Resistance for Monitoring system + 250Ω(∗1) + Resistance of supply voltage (*1).- 5 -No. SS2-AVP300-0100 (Rev.10)Yamatake Corporation- 6 -MODEL SELECTIONAnalog signal (4 to 20mA DC) without travel transmission.Analog signal (4 to 20mA DC) with travel transmission.Note)*1 1 set of JIS Flameproof cable gland shall be attached for model AVP300. 2 sets are for model AVP301.*2Standard finish is equal to previous Y138A. Corrosion proof is equal to previous Y138A.*3No domestic sales in Japan due to Non-SI unit.*4For JIS Flameproof model, these elbows should be put on the supplied cable gland.*5They are applied only for RC1/4 air piping connection.*6They are applied only for G1/2 electrical connection.ConfigurationFollowing shows default and optional settings of each configurable parameter of SVP.Unless otherwise specified, the Smart Valve Positioner will be shipped in the following configuration.1. Input control signal 4 to 20mA The minimal span for custom range = 4mA2. Output characteristic Liner EQ or QO can be ordered or set by user.3. Valve action Direct (Plug above seat)Reverse (Plug below seat) can be ordered or set by use4. Output signal for position transmission 4 to 20mA DE also selectableA VP300(1)(2)(3)(4)(5)-(6)(7)(8)(9)-(10)A VP301(1)(2)(3)(4)(5)-(6)(7)(8)(9)-(10)ConnectionAir pipingElectrical connection Mounting thread Code (1) StructureWater-proof Rc1/4G1/2M8X Water-proof 1/4NPT internal 1/2NPT internal 5/16-18P Water-proof 1/4NPT internal M20×1.5M8Q JIS Flameproof with cable gland *1Rc1/4G1/2M8E FM Explosionproof and Flameproof 1/4NPT internal 1/2NPT internal 5/16-18F FM Intrinsically safe 1/4NPT internal 1/2NPT internal 5/16-18M CSA Exprosionproof 1/4NPT internal 1/2NPT internal 5/16-18A ISSeP/CENELEC Flameproof 1/4NPT internal M20×1.5M8C KEMA/CENELEC Intrinsically safe 1/4NPT internal 1/2NPT internal 5/16-18U KEMA/CENELEC Intrinsically safe 1/4NPT internal M20×1.5M8L NEPSI Flameproof 1/4NPT internal 1/2NPT internal 5/16-18B NEPSI Flameproof 1/4NPT internal M20×1.5M8N NEPSI Intrinsically safe 1/4NPT internal 1/2NPT internal 5/16-18H NEPSI Intrinsically safe 1/4NPT internal M20×1.5M8S NEPSI Intrinsically safe and Flameproof 1/4NPT internal 1/2NPT internal 5/16-18R NEPSI Intrinsically safe and Flameproof 1/4NPT internal M20×1.5M8W (2) FinishStandard (Baked acrylic) *2S Corrosion proof (Baked acrylic) *2B Silver finish (Baked epoxy)D (3) Positioner action Direct action - Air pressure increases with control signal increase D Reverse action - Air pressure decreases with control signal increaseR Air supply range Pressure gauge scaleMax regulator setting(4) Supply air pres-sure classification130<Ps ≤150 kPa {1.3≤Ps ≤1.5 kgf/cm 2}200 kPa {2 kgf/cm 2}400 kPa {4 kgf/cm 2}1150<Ps ≤300 kPa {1.5<Ps ≤3.0 kgf/cm 2}400 kPa {4 kgf/cm 2}400 kPa {4 kgf/cm 2}2300<Ps ≤400 kPa {3.0<Ps ≤4.0 kgf/cm 2}600 kPa {6 kgf/cm 2}400 kPa {4 kgf/cm 2}3400<Ps ≤450 kPa {4.0<Ps ≤4.50 kgf/cm 2}600 kPa {6 kgf/cm 2}700 kPa {7 kgf/cm 2}4450<Ps ≤700 kPa {4.5<Ps ≤7.0 kgf/cm 2}1000 kPa {10 kgf/cm 2}700 kPa {7 kgf/cm 2}5(5) Scale unit (Pres-sure gauge)kPaA kgf/cm 2*3B MPa C bar D psi *3E (6) Pressure regula-tor with filter No selectionX Model KZ03 pressure regulator with filter (Mounted on positioner)1Model KZ03 pressure regulator with filter (with bracket for separated mount)2(7) Material of No selectionX Bracket / Bolts Steel - Zinc plated / Stainless steel C Stainless steel / Stainless steel D (8)(9) Actuators (for bracket)No selectionXXFor single acting actuator Refer to Table 1For double acting actuatorRefer to Table 2(10) Option(Plural selection available)No selectionX Universal elbow explosion-proof (SUS304 G1/2) 1 pc. For model A VP300 *4A Universal elbow explosion-proof (SUS304 G1/2) 2 pcs. For model A VP301 *4C Stainless filter for KZ03 (Pressure regulator with filter)K 2 pcs. of adapter for air piping connection (Rc1/4 to 1/4NPT) for single acting actuator *5E 3 pcs. of adapter for air piping connection (Rc1/4 to 1/4NPT) for double acting actuator *5N 1 pc. of adapter for electric connection (G1/2 to 1/2NPT) for model A VP300 *6F 2 pcs. of adapter for electric connection (G1/2 to 1/2NPT) for model A VP301 *6G Filter (Screen for air-exhaust port)H Reversing relay for double acting actuatorWYamatake CorporationNo. SS2-AVP300-0100 (Rev.10)- 7 -Note)*1Select “YW” or “YJ” for old-type motionconnectors. (Produced on/before Apr. ‘83)*2Consult sales in case of no mounting hole on the side of valve yoke.*3Consult sales in the case of without man-ual handle or manual handle mounted on the actuatorsNote)*4Code “W” of option (10) must be selected.Table 1 Mounting bracket for single acting actuator (8)(9) Mounting bracket to pneumatic actuators Code PSA1, PSA2, PSK1YS PSA3, PSA4 / V A1 to V A3 produced afterApr.’83 *1YQPSA3, PSA4 for existing valves on/before 1999YY PSA6 / V A to V A6 produced after Apr.’83 *1YL HA1YA HA2, HA3, HL2, HL3YT HA4, HL4YN HK1, VM1YK VM12 for model VSP YB VR1YV VR2, VR3YR RSA2YU GOM 83S, 84S, 103S YG GOM 124S YM V A1 - V A3 (for old-model motion connectors)Produced on/before Apr.‘83 800-1, 8003 *2YWV A4 - V A5 (for old-model motion connectors)Produced on/before Apr.‘83 800-4, 800-5*2YJMotoyama Mfg. 2800 series 240, 280, 330,Nihon Kohso A100 series 270, 320 *3TAMotoyama Mfg. 2800 series 400, 500S, 500L,Nihon Kohso A100 series 400, 500 *3TBMotoyama Mfg. 2800 series 650S, 650L TC Motoyama Mfg. 2800 series 240, 280, 330 (withside manual)TDMotoyama Mfg. 2800 series 400, 500S, 500L(with side manual)TEMotoyama Mfg. 2800 series 650S, 650L (withside manual)TFMotoyama Mfg. 3800 series (multi-spring type)24, N28, N33STJMotoyama Mfg. 3993 series (Gyrol II) G. R. II TG Masoneilan 37, 38 series #11 *3MA Masoneilan 37, 38 series #13 *3MB Masoneilan 37, 38 series #15, #18 *3MC Masoneilan 37, 38 series #15, #18 (w/ side man-ual)MFMasoneilan 35002 series Camflex II #4-1/2, #6,(Valve size 1 in. - 4 in.)MGMasoneilan type 35002 Camflex II #7 (Valvesize 6 in. - 12 in.)MHKitamura Valve AK09S, AK12S, AK15S KATable 2 Mounting bracket for double acting actuator (8)(9) Mounting bracket to pneumatic actuators Code VP5, 6*4Y1VP7*4Y7SLOP560, 1000, 1000X *4Y2SLOP1500, 1500X *4Y3DAP560, 1000, 1000X *4Y4DAP1500, 1500X *4Y5Kitamura Valve AK09, AK12, AK15*4KATable 3 Standard travel range and accuracyActuator Travel (mm)Accuracy [% F.S.]HA16, 8, 10314.3, 251HA210314.3, 25, 381HA314.3325, 38, 501HA414.3325, 38, 50, 751V A525, 37.5, 50, 75, 1001V A614.33PSA625, 37.5, 501PSA1, 2, PSK1201PSA3, 4381HK1103191No. SS2-AVP300-0100 (Rev.10)Yamatake Corporation- 8 -DIMENSIONSFor single acting actuator without pressure regulator with filter[Unit: mm]ExtensionleverActuator model Code NoPSA1, 2, PSK1YS PSA3, 4YQ HA1YA HA2, 3YT HK1YK V A1 to 3YQ YesPSA6YL HA4YN V A4 to 6YL VR1YV VR2, 3YR Terminal connections GOM83S, 84S, 103SYG Mounting plate reference dimensionTerminal screw size M4GOM124SYMTypesElectrical connection Air piping connection Mounting threads JIS Flameproof or water-proof type G1/2Rc1/4M8KEMA/CENELEC intrinsically safe, FM and CSA approvals, NEPSI approvals or water-proof type 1/2NPT 1/4NPT 5/16-18UNCISSeP/CENELEC Flameproof,NEPSI approvals or water-proof type M20×1.51/4NPT M8Parts on drawings*1*2*3Yamatake Corporation No. SS2-AVP300-0100 (Rev.10)- 9 -For single acting actuator with pressure regulator with filter[Unit: mm]Extension leverActuator model CodeNoPSA1, 2, PSK1YS PSA3, 4YQ HA1YA HA2, 3YT HK1YK V A1 to 3YQ YesPSA6YL HA4YN V A4 to 6YL VR1YV VR2, 3YR GOM83S, 84S, 103SYG GOM124SYM TypesElectrical connection Air piping connection Mounting threads JIS Flameproof or water-proof type G1/2Rc1/4M8KEMA/CENELEC intrinsically safe, FM and CSA approvals, NEPSI approvals or water-proof type 1/2NPT 1/4NPT 5/16-18UNCISSeP/CENELEC Flameproof,NEPSI approvals or water-proof type M20×1.51/4NPT M8Parts on drawings*1*2*3No. SS2-AVP300-0100 (Rev.10)Yamatake Corporation- 10 -For double acting actuator with reversing-relayWithout pressure regulator with filter[Unit: mm]With pressure regulator with filterNote。
边锋智驱M1 EVO直升机说明书
配件编号:OSHM1207OModel:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1207O配件编号:OSHM1207YModel:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1207Y配件编号:OSHM1208OModel:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1208O配件编号:OSHM1208SModel:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1208S配件编号:OSHM1208YModel:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1208Y配件编号:OSHM1209WModel:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1209W配件编号:OSHM1209RModel:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1209R配件编号:OSHM1209YModel:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1209Y配件编号:OSHM1209OModel:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1209O配件编号:OSHM1210WModel:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1210W圆柱头内六角螺丝M1.6x4mm Socket screw M1 EVO 主电机组-(魔力橙)配件名称:Product name:Main motor (Orange) set M1 EVO 主电机组-(竞速黄)Product name:配件名称:Main motor (Yellow) set 尾电机组-(魔力橙)配件名称:Product name:Tail Motor Set(Orange) 尾电机组-(银色)Product name:配件名称:Tail motor (Sliver) set 尾电机组-(竞速黄)Product name:配件名称:Tail Motor Set(Racing Yellow) 125 主旋翼组-(魔力橙)配件名称:Product name:125mm main blades (Orange) set 125 主旋翼组-(竞速黄)配件名称:Product name:125mm main blades (Yellow) set 125 主旋翼组-(魅惑红)配件名称:Product name:125mm main blades (Red) set 125 主旋翼组-(典雅白)配件名称:Product name:125mm main blades (Blue) set M1 EVO 机头罩--典雅白配件名称:Product name:M1 Canopy set (White) set 配件编号:OSHM1207SModel:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1207SM1 EVO 主电机组-(银色)Product name:配件名称:Main motor (Silver) set M1 EVO 机头罩--魔力橙配件编号:OSHM1210OModel:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1210O配件名称:Product name:M1 Canopy set (Orange) set 配件编号:OSHM1210YModel:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1210Y配件编号:OSHM1211OModel:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1211O配件编号:OSHM1211RModel:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1211R配件编号:OSHM1211YModel:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1211YM1 EVO 机头罩--竞速黄配件名称:Product name:M1 Canopy set (Yellow) set 脚架组-(竞速黄)Product name:配件名称:M1 landing skid set (Yellow)脚架组-(魅惑红)Product name:配件名称:M1 landing skid set (Red)脚架组-(魔力橙)Product name:配件名称:M1 landing skid set (Orange)配件编号:OSHM1044Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1044舵机组--(全金属外壳+全金属齿轮)配件名称:Product name:Servo Set(metal housing + metal gear)配件编号:OSHM1210RModel:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1210RM1 EVO 机头罩--魅惑红配件名称:Product name:M1 Canopy set (Red) set 配件编号:OSHM1211WModel:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1211W脚架组-(典雅白)Product name:配件名称:M1 landing skid set (White)配件编号:OSHM1025Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1025飞控Product name:Flight Control 配件名称:18EN 圆柱头内六角螺丝M1.6x4mm Socket screw 圆柱头内六角螺丝M1.6x4mmSocket screw19EN配件编号:OSHM1047Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1047接收板--内置FUTABA :S-BUS 高频配件名称:Product name:Receiver panel--Built-in FUTABA:S-BUS High Frequency 配件编号:OSHM1048Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1048配件名称:Product name:配件编号:Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag 电调板-10A配件名称:Product name:ESC-10A 接收板--常规版本receiver panel-- Regular Version S-BUS 高频配件编号:OSHM1050Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1050配件名称:Product name:配件编号:OSHM1051Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM10510.3一字螺丝刀配件名称:Product name:Slotted screwdriver 1.0六角螺丝刀Hexagon screw driver 配件编号:OSHM1052Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1052主翼支撑架配件名称:Product name:Main wing support frame 配件编号:Main shaftModel:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1053主轴组配件名称:Product name:ɸ3 main Shaft Set 配件编号:OSHM1054Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1054尾螺旋桨组-(魔力橙)配件名称:Product name:Tail Blade Set(Charm Orange)配件编号:OSHM1055Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1055尾螺旋桨组-(紫色)配件名称:Product name:Tail Blade Set(purple)配件编号:OSHM1056Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1056尾螺旋桨组-(竞速黄)配件名称:Product name:Tail Blade Set(Racing Yellow)配件编号:OSHM1057Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1057舵机摆臂组配件名称:Product name:Servo Arm Set 配件编号:OSHM1059Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1059充电器线1V1配件名称:Product name:Charger cable(1V1)配件编号:OSHM1058Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1058球头螺丝组配件名称:Product name:Ball Joint Set 配件编号:OSHM1060Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1060配件名称:Product name:充电器线1V3Charger cable(1V3)配件编号:OSHM1061Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1061舵机球头螺丝组配件名称:Product name:Servo Ball Joint Set 6PCS机头罩橡胶圈组(M1)配件编号:OSHM1062Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1062Product name:Canopy Rubber Ring Set(M1)配件名称:4PCS齿轮组(DS2045MG )配件编号:OSHM1063Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1063Product name:Servo Gear Set(DS2045MG )配件名称:配件编号:OSHM1064Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1064配件名称:Product name:舵机外壳组(DS2045MG )Servo Plastic Shell Set(DS2045MG )全塑胶外壳O 型圈组(M1 EVO)配件编号:OSHM1206Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1206Product name:Battery tray rubber 配件名称:配件编号:OSHM1205Model:包装方式:吊卡+PE 袋Package:Hang tag +PE bag OSHM1205十字盘调平器配件名称:Product name:Cross Plate leveller OSHM1216OSHM1216。
Freescale 3-PHASELV-KIT 三相BLDC PMSM低压电机控制开发套件说明书

3PHASELV-KITMotor Control3-phase BLDC/PMSM Low Voltage Motor Control Kit Fact SheetDescriptionThe urgent need to offer a final solution within a short delivery time to the market leads developers to optimalize and speed up the whole development process. Fast prototyping and fast development are essentialrequirements for success. The area of motor control needs to meet these requirements as well. Therefore, Freescale provides the hardware, software, tools and knowledge-based support for motor control applications. The 3-ph Low Voltage Motor Control Kit represents a platform for motor control application development. This modular system enables the fast development of sensor / sensorless BLDC and PMSM motorapplications using different controllers, starting with the HCS08, the DSC, and up to the ColdFire family. Moreover, easy porting from one controller to another, with motor control libraries support and the FreeMASTER development tool, significantly contributes towards finalization of the development far earlier than ever before. This motor control kit is also suitable for those who want to easily learn and develop their first motor control application soon, verify existing motor control techniques, or to implement a new one.Target applications•BLDC motor •PMSM motor •DC motor•Automotive applications •Motor control applicationsProduct Features and Specifications•3-ph BLDC/PMSM Low Voltage Motor Control Drive board •MC56F8006 daughter board •MC9S08MP16 daughter board •40W BLDC motor •24V / 3A power supply• 2 CDs with datasheets, reference manuals, source codes and much more •user interface / FreeMASTER •3-ph MOSFET bridge inverter •3-ph MOSFET gate driver (MC33937)• d.c.-bus voltage and current sensing •BEMF voltage sensing •phase current sensing •Encoder/Hall sensor sensing •CAN physical layer•USB interface (MC9S08JM60) for FreeMASTER •LED indicatorsFreescale™ and the Freescale logo are trademarks of Freescale Semiconductor, Inc. All other product or service names are the property of their respective owners. © Freescale Semiconductor, Inc. 2006 / Document Number: xxxxxREV 0Learn More:For current information about Freescaleproducts and documentation, please visit.The 3-ph BLDC/PMSM Low Voltage Motor Control Drive board incorporates all the necessary circuitry needed for development of motor control applications. It incorporates a complete 3-phase power stage, a communication interface, feedback signal handling and the user’s interface. All the control, feedback and communication signals are routed to the MCU header connectors. The MCU header incorporates the main MCU controlling the system. The MCU headers can be easily changed to another with a different microcontroller. This modular approach allows for easily porting an application among different controllers. The MC9S08MP16 and MC56F8006 MCU headers are included in the Motor Control Kit.Two BLDC sensorless applications are provided for the attached controllers. Detailed designer reference manuals ( DRM108 and DRM 117) and source codes are included as well. Applications are already loaded in the controllers and are up and running as soon as a power supply is applied. The BLDC sensorless applications can be controlled using the push buttons and toggle switch, or by using FreeMASTER control pages. The 3-ph BLDC/PMSM Low Voltage Motor Control Drive board is then connected to the host PC via the USB cable.This kit is ready to order on the freescale website , under 3PHASELV-KIT.3PHASELV-KIT。
飞宇Vimble 3手机稳定器说明书

Instruction ManualE N V 1.03-Axis Stabilized Handheld Gimbal for SmartPhoneGuiLin FeiYu Technology Incorporated Company1Please refer to“Explanation ofProduct Overview* The smartphone shown in the pictureis only for reference2 Joystick① To take a picture, press the Bluetooth shutter.② To start or stop recording a video, press andhold the Bluetooth shutter for 1 second.“Modes / Functions”axisHandleBest Balance3Download and connect APP1Start the app on your smartphone,follow the instructions to connect the smartphone with gimbal via Bluetooth.Download APPDownload "Feiyu ON " and install it.(1)IOS version:(2) Android version:Google play24Modes / FunctionsThe orientation of the camera is fixed.Working ModesPanning ModeTilting and rolling direction are fixed, and the camera lens moves according to the hand movementof the user.Panning and Tilting Mode The rolling direction is fixed, and the camera lens moves according to the hand movement of the user.Lock ModeMode / Function Operating InstructionsToggle switch Function InstructionsModes / FunctionsExplanationSingle tap Panning and Tilting Mode Boot default panning mode,press one time then switch to panning and tilting mode,press again swith to panning mode Lock Mode Under panning mode 、panning and tilting mode, long press then switch to lock mode,release to go backLong press Bluetooth shutter/Powerand Toggle switch 1sStandbyPress the toggle switch again to wake the gimbal Need to connect mobile phone APP5Left and right toggle Zoom in / Zoom outLong press Triple tapReset Reset the tilting axis of the gimbal to initial orientation and initial modeRGB three-color lightsExplanation of LED indicator modesGimbal operating mode and LED indicator:Mode / StatusBlue light flashes onceNote: The two RGB indicators have thesame status Blue light flashes twice PanningPanning and tilting mode Lock mode / InitializingBlue light on steadilyBlue light keeps flashingInitialization failure /MalfunctionBlue light flashes three times Standby Low battery Red light flashes three times Red light keeps flashingSwitching to standby mode/Gimbal will power offRGB three-color lightsLED indicator modes during charging:Mode / StatusGreen light Red lightFully chargedGimbal is being charged6MICRO USBUSB port7Feiyu ONGimbal initializationYou can initialize your gimbal :(1) when camera is not level(2) if not used for a long period of time(3) in case of extreme temperature variationsBlue light flashes quickly for three timesInitialization successful3Stands on table8Long pressParameters9320°320°320°min 2°/s max 75°/smin 3°/s max 150°/s Titling AngleRolling AnglePanning AngleAdaptionWeightiPhone series / HUAWEI P9 / HUAWEI P9 Plus / Mi 5 / MEIZU MX6 / SAMSUNG NOTE 5 / S7or other smartphones with the similar dimensions420g (not including smartphone )Titling IncrementsPanning IncrementsUsage time 5 HoursD I S C L A I ME R 10DelTron Interlligence reserves the right to amend this manual and the terms and conditions of use the product atany time.You can get the latest user manual from the official website: The Company assumes no liability for any risks related to or resulting from the debug and use of thisproduct (including the direct, indirect or third-party losses).Prohibit any user for any illegal purpose. Users will be responsible for all behaviors of purchase and use products.For any unknown sources of using, we will not be at any services.The updating and changes of product firmware and program may cause changes in function descriptions in this user manual, please read the instructions carefully before upgrading the firmware and use the corresponding user manual.Attention When the gimbal is not in use or placed on the table, please ensure it is powered off.Please correctly assemble the gimbal in accordance with thediagram.Please install the phone before powering on the gimbal.Create More Possibilities Array For more information, please visit our official website SupportEmail:**********************。
激活科技3A41 3MP 超高清镜头摄像头说明说明书

1, BNC
PoE Class 3 / 10W; DC 12V / 8 W 0.82 kg (1.807 lb)
80 x 258.3 mm (3.15" x 10.17") Weatherproof (IP66 rated) Wall, Ceiling, Pole
-20°C ~ 50°C (-4°F ~ 122°F) within 30 minutes -20°C ~ 50°C (-4°F ~ 122°F) 20% ~ 80% RH
1, Ethernet (10/100 Base-T), RJ-45 connector IP address filtering; HTTPs encryption; Password protected user levels; Anonymous login; IEEE802.1X network access control
(IK10)
DIMENSION DIAGRAM
1234567
1 Audio Output 2 DC 12V Power Input 3 Factory Reset3 4 BNC Video Output
5 Audio Input 6 Ethernet Port 7 Digital Input / Output
Video motion detection (10 regions); External device through digital input; Sound detection Notify control center; Go to ePTZ preset point or preset tour; Change camera settings; Command other devices; E-mail notification with snapshots;
F3A新动作详解(上)
F3A 新动作详解(上)F3A P-11新动作将在2011年全国航空航天模型锦标赛中使用。
它包括M 字、倒半古巴8 字、双向慢滚、半方筋斗、倒飞45°下降四位滚、“驼峰”、内筋斗带1 80 °八位滚、斜半方筋斗、倒古巴8字带4/8 和2/4 位滚、半内筋斗接1/2 位滚、双向4/8 位滚、失速倒转、双殷麦曼带2/4 位滚和一周滚、9字、双向侧飞、8字形和倒飞双向2 1/4 螺旋。
起飞动作和着陆动作不评分,允许降落方向与起飞方向不同。
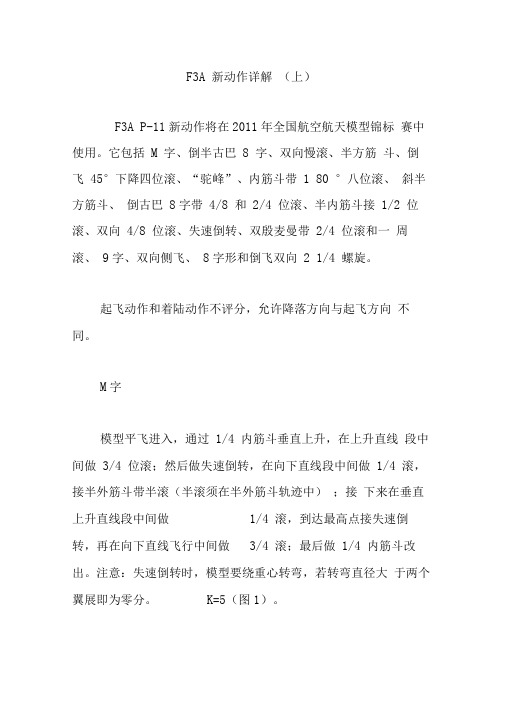
M字模型平飞进入,通过1/4 内筋斗垂直上升,在上升直线段中间做3/4 位滚;然后做失速倒转,在向下直线段中间做1/4 滚,接半外筋斗带半滚(半滚须在半外筋斗轨迹中);接下来在垂直上升直线段中间做1/4 滚,到达最高点接失速倒转,再在向下直线飞行中间做3/4 滚;最后做1/4 内筋斗改出。
注意:失速倒转时,模型要绕重心转弯,若转弯直径大于两个翼展即为零分。
K=5(图1)。
倒半古巴8 字模型平飞进入后以45°角上升,在上升直线段中间做2/4 位滚,接5/8 内筋斗平飞改出,所有筋斗的半径须相同。
K=3 (图2)。
双向慢滚模型水平直线飞行进入,一周慢滚后紧接一周反向慢滚。
注意:两慢滚的速率须相同,滚间停顿时间要短。
K=(4 图3)。
半方筋斗模型在上升直线中间快滚一周,水平倒飞改出。
注意:所有筋斗的半径须相同,快滚方向不限,但若为桶状或副翼滚则扣分大于5分。
K=3 (图4)。
倒飞45°下降四位滚模型水平倒飞进入,以45°角直线下降,在下降直线中间完成四位滚,倒飞改出。
K=3 (图5)。
“驼峰”模型倒飞进入,做1/4 外筋斗,然后在垂直上升直线中间做1/2 滚后接1/2 外筋斗,接着在垂直下降直线中间作2/4 位滚,最后做1/4 内筋斗正飞改出,所有筋斗的半径相同。
K=3 (图6)内筋斗带180°八位滚模型平飞进入内筋斗,并在其上半部180°弧线内完成一周八位滚。