Triconex功能块中文说明
tricon中文资料

8
远距延伸模件(RXM)
3664 36672 型号
3636R
3700 3700A 3701 3703E3
3704E3
37064 3708E4
3510
3805E
1-5
第一章
光纤
初级 RXM 机架用的一组三个模
无
4200
件
光纤
初级 RXM 机架用的一组三个模
无
4201
件
注:3. #3703E 和#3704E 型必须用 TRISTATION 配置为 0~5 或 0~10VDC。
——能耐受严酷的工业环境。 — — 能 够 现 场 安 装 ,可 以 在 控 制 器 在 线 使 用 状 态 下 进 行 模 件 一 级 的修理工作。I/O模件的更换不会打乱现场布线。 — — 能 支 持 多 达 118个 I/O模 件 (模 拟 的 和 数 字 的 )和 选 装 的 通 讯 模 件 , 该 模 件 可 以 与 Modbus 主 机 和 从 属 机 连 接 , 或 者 和 Foxboro 与 Honeywell分 布 控 制 系 统 (DCS)、 其 它 在 Peer— to— Peer网 络 内 的 各 个TRICON、以及在802.3网络上的外部主机相连接。 — — 备 有 组 合 的 支 持 ,可 以 支 持 位 于 远 离 主 机 架 2公 里 (1.2英 里 ) 以内的远距I/O模件。 ——可以执行控制程序,该程序按继电器梯级逻辑写成并由一 独立的称作TRISTATION的工作站进行演变和调试。 ——在输入和输出模件内备有智能功能,以使主处理器的工作 负 荷 得以减轻。每个 I/O模件都有三个微处理器。输入模件的微处理 器对输入进行过滤和解跳,并诊断模件上的硬件故障。输出模件微 处理器力输出数据的表决提供信息、检查来自输出终端的环回数据 以使输出能最后有效、并能诊断现场线路的问题。 ——提供总体的在线诊断,并具有自适应修理能力。 — — 可 以 在 TRICON正 常 运 行 中 进 行 常 规 维 护 而 不 干 扰 被 控 的 过 程。 ——可支持“热插备件”I/O模件在关键时候的使用,在不可能 立即进行维修的情况下应急。
Tricon系统培训笔记

Tricon系统培训笔记一.DCS与SIS的主要区别1.安全系统定义:~~设计为当工厂本身发生危险情况或如果不采取行动就会最终导致风险增加,此时,安全系统必须产生及时、正确的输出,来防止危险情况的发生或减轻后果。
2.DCS与SIS的主要区别:a.本质不同:SIS: 为故障安全型系统;DCS: 为非故障安全型系统。
b.用途不同:SIS对生产过程不产生影响,非正常情况下将按照预先的设计逻辑进行逻辑运算,使生产装置安全连锁或停车;DCS始终对过程变量进行检测、运算、控制,对生产过程进行动态控制,确保产品质量和产量。
3.TRICONEX(公司名):是生产三重化、冗余化、容错系统的公司。
#三重化:4.Tricon的机架有主机架、扩展机架、远程扩展机架组成:#c1——主机架c2~~c15——扩展机架#扩张机架用于离主机架≤30m的场合,当大于30m小于2km时用远程扩展机架#一个主机架可带14个扩展机架,可带14 * 8个I/O端口,但实际为了将Tricon应用于ITCC、ESD时缩短其响应时间,I/O端口留有一定冗余(响应时间=自诊断时间+软件执行时间(<100ms)+裕度(10%—15%),Tricon的响应时间在10ms到450ms之间,出厂默认时间为200ms)。
#Tricon之所以不需要做成冗余结构是因为其满足SIL3安全完整性等级(SIL4用于核电)#每个机架设置两个冗余电源,单个电源功率为175W#Tricon接地电阻小于4欧姆5.更换处理器注意事项:a.要选用相同的处理器型号和用户程序版本号,常用处理器型号为3008,用户程序版本从V9.0到V10.6;b.在更换完其中一块处理器时,必须要等到处理器自诊断完成后指示灯正常才能更换下一个处理器,否则会导致程序的丢失等故障。
6. 处理器与模件的通信:一般选用TCM4351 A/B通讯卡,采用comm bus 使其与处理器连接。
通讯卡上NET1作用:一是可实现处理器之间点对点的通讯;二是通过NET1口可进行时钟的同步,规则为节点号大的向节点号小的看齐,故许做时钟同步程序,但任有25ms误差。
Triconex手册

Tricon设计与安装手册用于Tricon控制器部件号. 9720077-001目录第1章概述1.1 Tricon是什么?1.1.1 什么是容错?1.1.2 Tricon系统的特点1.2 系统配置1.2.1 Tricon模件1.2.2 Tricon机架1.2.3 Tricon现场接线1.2.4 编程工作站1.2.5 环境规格1.3 工作原理1.3.1 主处理器模件1.3.2系统总线和电源分配1.3.3 数字式输入模件1.3.3.1 TMR数字输入模件1.3.3.2 简易型数字输入模件1.3.4 数字输出模件1.3.5 模拟输入模件1.3.6 模拟输出模件1.3.7 端子板1.3.8 通讯模件1.3.9 电源模件1.3.10 系统诊断与状态指示1.4 国际认证1.4.1 TUV Rheinland1.4.2 加拿大标准协会1.4.3 工厂互助组织1.4.4 半导体设备及财原料国际组织(SEMI)1.4.5 欧洲联盟CE标志第2章基本部件2.1 主机架与扩展机架2.1.1 主机架电池2.2 I/O扩展2.2.1 RS-485扩展总线口的应用2.3 电源模件—#8310、8311、8312型2.3.1 具体说明2.3.1.1 系统接地选装件的终端2.3.1.2 电源/报警接入用终端2.3.1.3 状态指示灯2.3.1.4 报警用途的终端2.3.2 特殊性能2.3.3 报警说明2.3.3.2 扩展机架的报警性能2.3.4 电源模件规格2.4 主处理器模件2.4.1 适配的通讯模件2.4.2 #3008物理描述2.4.3 事件顺序性能2.4.3.1 多个Tricon的时间标识2.4.4 诊断2.4.5 主处理器的规格第3章可选模件3.1 数字式输入模件3.1.1 TMR数字式输入模件规格3.1.2 简易型数字输入模件规格3.2 数字输出模件3.2.1 TMR数字输出模件规格3.2.2 16点SDO模件规格3.2.3 8点SDO模件规格3.2.4 继电器输出模件3.2.5 双重数字式输出模件3.3 模拟输出模件3.3.1 TMR模拟输入模件规格3.4 模拟输出模件3.4.1 TMR模拟输出模件规格3.5 热电偶输入模件3.5.1 非隔离热电偶输入模件规格3.5.2 TMR隔离热电偶输入模件规格3.6 脉冲输入模件3.6.1 脉冲输入模件规格3.7 脉冲累计输入模件3.7.1 计数器溢出保证性能测试3.7.2 脉冲累计输入模件规格(#3515模件)3.8 增强型智能通讯模件3.8.1 EICM的规格3.9 网络通讯模件3.9.1 Triconex协议的说明和应用3.9.1.1 Peer-to-peer3.9.1.2 时间同步3.9.1.3 TriStation3.9.1.4 TSAA3.9.1.5 TCP/IP3.9.1.6 外部主机应用3.9.2 网络通讯模件的规格3.10 安全管理模件3.10.1 SMM的规格3.11 高速通道接口模件3.10.1 高速通道接口模件的规格3.12 先进通讯模件3.12.1 先进通讯模件的规格第4章安装与检查4.1 推荐的安装过程4.1.1 电源模件的连接4.1.2 报警接线4.1.3 机械安装4.1.3.1 机架背部安装4.1.3.2 机架的架体安装4.1.3.3 对流冷却4.1.3.4 可控的环境特征4.1.4 盲板的使用4.1.5 用户选装部件4.1.5.1 Tricon部件的标准重量4.1.5.2 I/O模件的槽键4.1.5.3 Tricon机架的I/O总线地址4.1.6 不同系统配置下的电源支持4.1.6.1 确定Tricon机架的逻辑功率4.1.6.2 确定冷却要求4.1.7 系统内各模件配置的规则4.1.7.1 允许的模件总数4.1.7.2 每种类型的最大点数4.1.7.3 对于通讯模件的特殊规定4.1.8 机架和I/O总线的连接4.1.9 试运行4.1.10 和TriStation PC的连接4.1.10.1 把EICM接到TriStation上4.1.10.2 把NCM或ACM接到TriStation上4.1.11 主机架的电池4.1.12 数字输出模件的输出表决器诊断4.1.12.1 AC电压数字输出模件4.1.12.2 DC电压数字输出模件4.1.12.3 现场布线的注意事项4.2 正确地将Tricon接地4.2.1 Tricon的接地系统4.2.2 为何必须有安全接地4.2.3 把机架的AC安全接地相4.2.4 连接Tricon的信号地4.2.4.1全数字系统4.2.4.2 全模拟系统或模拟/数字混合系统4.2.4.3 与大型控制系统的集成4.2.5 连接屏蔽地第5章维护5.1 常规维护5.1.1 检查系统电源5.1.2 启用“禁止”输出表决器诊断(OVD)5.1.3 反向置位现场I/O点5.1.4 更换背板上的电池5.2 对报警的反应5.2.1 确认并诊断故障5.2.1.1 检查模件指示器5.2.1.2 利用TriStation的诊断能力5.2.2 电源模件5.2.3 主处理器5.2.4 数字输入模件5.2.5 模拟输入模件5.2.6 脉冲输入模件5.2.7 脉冲累计输入模件5.2.8 热电偶输入模件5.2.9 数字输出模件5.2.10 8点监控数字输出模件5.2.11 16点监控数字输出模件5.2.12 模拟输出模件5.2.13 继电器输出模件5.2.14 增强型智能通讯模件5.2.15 网络通讯模件5.2.16 安全管理模件5.2.17 先进通讯模件5.2.18 远程模件(RXM)5.3 模件更换5.3.1 电源模件更换5.3.2 主处理器更换5.3.3 没有热备的I/O模件的更换5.3.4 有热备的I/O模件的更换5.3.5 EICM的更换5.3.6 有热备的SMM的更换5.3.7 没有热备的SMM的更换5.3.8 NCM的更换5.3.9 有热备的HIM的更换5.3.10 没有热备的HIM的更换5.3.11 有热备的ACM的更换5.3.12 没有热备的ACM的更换第6章远程机架的应用6.1 基本资料6.1.1 远程位置置的设定6.1.2 RXM机架的逻辑配置6.2 RXM机架的描述6.2.1 RXM机架的RXM模件的规格6.3 RXM模件说明6.3.1 多模RXM组件6.3.1.1主光纤RXM组件—#4200-3模件6.3.1.2 远距光纤RXM组件—#4201-3模件6.3.1.3 多模RXM光纤电缆的规格6.3.2 单模RXM组件6.3.1.1主光纤RXM组件—#4210-3模件6.3.1.2 远距光纤RXM组件—#4211-3模件6.3.1.3 单模RXM光纤电缆的规格6.3.3 光缆的应用6.3.3.3多模光纤的选择6.4 典型光纤安装6.4.1 光缆6.4.2接线盒6.4.3尾纤6.4.4 接头附录A 因系统硬件的升级而更换EPROMA.1 升级的可能性A.2 EPROM识别A.3 EPROM的处理A.4 更换EPROMA.5 EPROM的位置A.5.1 数字输入模件A.5.2 数字输出模件A.5.3.1 TMR/双通道数字输出模件A.5.3.2监督型数字输出(SDO)模件A.5.3.3继电器输出模件A.5.3 模拟模件A.5.4 热电偶模件A.5.5 脉冲输入模件A.5.6 脉冲累计输入模件A.5.7 通讯模件A.5.8 远程模件(RXM)附录B 更改I/O总线地址附录C Tricon模件的键的更换C.1 键的识别C.2 安装电源模件的键C.3 安装单键和双键附录D标准电缆的插针D.1 TriStation到EICM的电缆D.2 25针到9针的转换接头D.3 Honeywell DHP电缆D.4 机架间互连用的I/O总缆附录E 更换/用户化用的推荐另件附录F 推推荐布线方法F.1 一般考虑F.2 导线屏蔽F.2.1 电缆间距F.2.2 导轨考虑F.2.3 接地附录G 词汇一览索引第一章概述本章介绍9.6版Tricon控制器及其配置信息,运行原则和安全认证级别。
TriconexDDE操作说明

DDE操作说明DDE Server软件是HMI(INTOUCH)和TRICON控制器间进行通信的软件,每次启动WindowViewer之前要首先启动DDE Server。
DDE Server软件安装之后,我们可按如下路径运行软件。
点击“开始”“所有程序”“Triconex”“DDE Server4.1”。
如下图所示一.配置DDE Server。
首次安装DDE Server,运行后如下图所示可以看到,此时信息栏中没有任何信息,说明DDE Server没有配置。
点击“File”“Configure…”。
如下图所示点击“Configure…”,弹出“Configuring Host Information”对话框。
如下图所示1.组态方法一点击“Add…”,然后在“Host Name Configuration”对话框中直接输入当前Tricon系统的相关信息。
打开1131程序,“Controller”“Configuration”“TriStation Configuration”然后按下图填入相关信息。
“Poll”中填写扫描时间,范围0~1000毫秒,值越小,通信速度越快。
“Redundant”勾选后可实现冗余通信(ITCC的IP分别为192.168.1.1和192.168.2.1)。
“Time Sync”勾选后,可实现操作站同步PLC,由于该项目是DCS同步ITCC,所以该选项不能勾选。
“Device Type”中选择“Tricon”。
最后点击“OK”完成设定。
2.组态方法二点击“Default”,“Host Name Configuration”会显示Tricon的31个通信节点的默认组态。
留下当前系统节点的组态,删除其余的。
然后点击“Modify…”,在“Host Name Configuration”对话框中完成“Poll”,“Redundant”和“Time Sync”的设定。
二.启动DDE Server。
TRICON功能块说明

TRICON功能块说明TRICON是一种用于工业过程控制和安全系统的可编程逻辑控制器(PLC),由施耐德电气(Schneider Electric)推出。
TRICON系统主要由三个关键组件组成:TRICON I/O子系统,TRICON主处理器和TRICONI/O网络。
TRICONI/O子系统是TRICON系统的输入/输出模块,用于监测和控制外部设备,如传感器和执行器。
它具有高密度和高速度的输入/输出通道,可以处理大量的模拟和数字信号。
TRICONI/O子系统具有独特的良好的耐用性,可以在恶劣的环境条件下工作,如高温,湿度和电磁干扰。
TRICON主处理器是系统的核心,负责执行用户编写的逻辑控制程序。
它具有高性能的处理能力和大容量的内存,可以处理复杂的逻辑运算和数据处理任务。
TRICON主处理器采用可靠的冗余系统设计,包括两个或更多的处理器,以确保系统的高可用性和故障恢复能力。
TRICONI/O网络是连接主处理器和I/O子系统的通信网络。
它可以传输实时数据和控制命令,确保系统的高可靠性和实时性能。
TRICONI/O网络采用冗余设计,有多个通信通道和路径,以防止单点故障和通信中断。
1.输出功能块(OUT):用于控制输出设备的状态,如开关、阀门或电机。
它可以接收逻辑或模拟信号作为输入,并根据定义的逻辑关系输出命令。
2.输入功能块(IN):用于读取输入设备的状态,如传感器或开关。
它可以检测输入信号的变化并将其转换为逻辑或模拟值。
3.定时器功能块(TMR):用于生成定时延迟。
它可以根据预定的时间间隔生成信号,用于控制和同步操作。
4.计数器功能块(CTR):用于计算输入信号的数量。
它可以用于监测和计量系统中的事件。
5.比较器功能块(CMP):用于比较两个输入信号的值。
它可以根据预定的条件和逻辑关系判断输入信号的相对大小和关系。
6.逻辑功能块(LOG):用于执行逻辑运算,如与、或、非等。
它可以将多个输入信号进行布尔运算,产生与逻辑结果。
Triconex操作手册

XXXXXXXXXXXXXXXXXXXX系统操作手册-------TRICONEX目录1.TriStation 1131操作手册 (2)2.Triconex SOE 操作手册 (8)3.Enhanced Diagnostic 诊断软件操作手册 (11)4.DDE Server 操作手册 (15)5.InTouth 操作手册 (18)6.特殊操作注释 (24)第一章TriStation 1131操作手册1.1 1131编程变量前缀,所有程序均按照此前缀编写逻辑1.2 登录到1131软件,打开软件界面在程序文件夹中双击图标,弹出:输入用户名(MANAGER)和密码(password)打开程序,在左面的菜单栏中如图所示:选择控制器画面,然后选择控制器双击连接,选择单击控制器连接,以使软件与控制器连接。
1.3 进入逻辑程序选择OK,双击右侧打开程序要看其中某一个逻辑可以双击打开需要选择的逻辑,然后选择连接并打开。
每个逻辑的都注有说明用来解释该逻辑功能,如图所示:1.4 进入逻辑块在进入到需要的程序块后,可以通过以下方式进入到每一逻辑块的每一页程序,选择可以直接看该逻辑中的某一页程序选择参数设置A组,然后按进入程序(或双击)。
1.5 在线情况修改报警值,连锁值在这个逻辑中可以修改报警联锁值,a. 双击修改报警值位号b. 选择“Disable”,然后写入新的报警联锁值(555),然后按Confirm, 新联锁值改为,然后选择Enable,修改结束。
1.6 在程序中查找逻辑中位号a. 如果不知道变量在具体哪个程序中,可以在程序文件中进行完全搜索:选择菜单栏上的,选择然后输入位号,然后点Find,搜索后,如下图:发现要找的LT_26121在程序中,然后在右侧边栏中找到相应程序并双击,如图:,就找到了相应变量。
b. 如果知道变量在具体哪个程序中,可以打开该程序,然后快捷键ctrl+F,如下图:然后选择Find First查找到第一个位置,然后选择Find Next向后查找,直到全部搜索结束。
Triconex-培训讲义基础版解析
Input
Leg
A
Input
Leg
B
Input
Leg
C
Output
Leg
A
Output
Leg
B
Output
Leg
C
Main
Processor
C
Main
Processor
B
I/O Bus
I/O Bus
I/O Bus
TriBus
TriBus
TriBus
Voter
Main
系 统 应 用
◇监控系统 ◇关键过程控制: 透平机械控制 ◇应用领域: 核电 交通及其他
Triconex 系统集成中心
什么是Tricon?
Triconex TMR
◇增加设备的安全性 ◇减少误停车次数和停车时间 ◇增加产量 ◇系统维护简单,快捷的技术支持 ◇兼容性好,可以和现有的或将来的系统方便的兼容
Tricon部件
一个基本的Tricon高密系统由下列部件组成: A 容纳各模件的机架 B 各种类型的I/O模件 C 现场端子板 D 以及编程工作站或操作站。
Triconex TMR
硬件表决机制则对所有来自现场的数字式输入和输出进行表决和诊断。 模拟输入则进行取中值的处理。因为每一个分电路都是和其它两个隔离的,任一分电路内的任何一个故障都不会传递给其它两个分电路。 维修工作,包括拆卸和更换有分电路故障的故障模件都可以在线情况下进行,而不中断过程控制。(在有热备卡件的情况下,并确认热备卡件处于工作状态,方可进行。)
TRICON调速及防喘振功能描述1

TRICON 调速及防喘振功能描述蒸汽透平的速度控制 :TRICONEX 将根据汽轮机主机厂的起机曲线编制自动或半自动起机程序。
在通常应用中,机组的速度控制可以有多种运行方式,包括停机、启动、暖机、加速、运行等。
在自动起机模式下,根据起机曲线的升速率,蒸汽透平将自动从零转速升到最小转速或额定转速。
另外,还将组态迅速越过临界转速的控制。
在半自动起机模式下,操作工可在从零转速到最小转速之间的任何转速下停留。
一旦达到最小转速,操作人员可将转速进一步提高到工作转速。
防喘振控制基本原理: 机组投入运行后,TRICON 系统将根据压缩机入口流量、入口压力、出口压力及相应的温度,利用TRICONEX 独特的防喘振技术来判断是否发生喘振。
如发生喘振,则由防喘振控制器的输出值进行调节防喘振控制阀。
A通用喘振线喘振参数压缩机的喘振点可由压比(Pd/Ps )及入口流量表测出的入口流量计算得出。
入口流量的测量值与 Pd, Ps, Td,及Ts 等可用来计算等价孔板值h (该孔板可视为位于压缩机的入口),进而作出喘振预测。
hs = hd Ps PdTs Td 防喘控制的 I/O 要求 TagType Function PTAI 入口/出口压力 TTAI 入口/出口温度 FT AI入口流量 PV AO防喘阀 SOVDO 旁路/放空阀 ESD DI跳车输出 防喘控制方框图TRICONEX 的防喘控制系统可由各个独立的功能模块来描述,每个模块都有各自已定义的功能,并通过输入输出信号(均给出位号名)与其它功能模块相互连接和作用。
F rom A dditional C om pressor Sections防喘模块方框图TRICON 喘振控制器特性特性简介:因为喘振发生得很快,必须使用特殊的控制技术来保证防喘阀及时打开。
TRICON控制器的运算速度很快,而且能够高效处理复杂的算法,所以TRICON控制器可以理想地实现防喘控制。
防喘控制策略的标准特性有:可选择Pd/Ps对h/Ps或Dp对h的算法如果喘振发生,喘振安全裕度可自动调整设定点浮动线功能可以在工作点向喘振线窜动时及时打开防喘阀特殊的喘振控制器带有适应增益及快开/慢关响应等功能比例调节功能可以‘迫使’防喘阀独立于控制过程而打开灵活的起机和跳车逻辑可选择手动控制帮助设定、测试和故障排除当喘振逼近或透平跳车时,电磁阀触点输出可“打开”防喘阀说明:如果实际应用需要,以上特性均可实现,未要求的特性则不予实现。
防喘振功能详解

防喘控制的 I/O要求
Tag
Type
Function
PT
AI
入口/出口压力
TT
AI
入口/出口温度
FT
AI
入口流量
PV
AO
防喘阀
SOV
DO
旁路/放空阀
ESD DI
跳车输出
防喘控制方框图
TRICONEX的防喘控制系统可由各个独立的功 能模块来描述,每个模块都有各自已定义的功能, 并通过输入输出信号(均给出位号名)与其它功能 模块相互连接和作用。
如果系统检测到工作点越过喘振线,表示喘振已发生,喘振控制线将被自动调节 到右方,而加大安全余量。
可能导致喘振的条件有: 因压缩机磨损导致喘振线移位 变送器调校不准确 安全裕度不足 过程条件突变 喘振线设置错误 每当如前述喘振被检测到,安全裕度增加(控制线右移)一个校准量。输入一个
防喘模块方框图
各块的功能介绍
TS3000控制系统的喘振控制功能用上图形象的表达,每一个模块都定 义一种具体的控制功能,各种控制功能相互作用,构成一个完整的防 喘振控制系统。
模块 1 选定控制算法。 模块 2 检测工作点离喘振控制曲线的远近情况。 模块 3 喘振安全域 (即喘振控制曲线与喘振曲线之间的距离)重新校
比例功能:
系统有一纯比例调节阶段,该阶段可独立于正常PI控制器 打开防喘阀。当工作点移到喘振控制线左方,而正常PI控 制器无法提供足够响应,可能导致严重的过程失序时,则 进入该阶段。亦即在控制线左方到达某一特定裕度,则打 开防喘阀,进入该阶段。当工作点与喘振线重合时,防喘 阀全开。换言之,工作点进入喘振控制线及喘振线之间时, 防喘阀按比例打开。该比例阶段是由信号选择器来实现的。 控制器的反馈动作迫使控制器输出跟踪该阶段。
tricon教程

Certain Residual Faults still exist !!
单个PLC 单个PLC 可能存在的故障
带自检的双数字输入模块 (Dual Digital Input Module) Module)
Main Processor
Main Processor
A
B TriBus I/O Bus
Input Termination
Output Leg B Output Leg C
Voter Output Termination
Input Leg C
C
TMR结构 TMR结构
每一个I/O 每一个I/O模件内都包容有三个独立的分电路 I/O模件内都包容有三个独立的分电路 每个MP模件控制系统都独立成为一路,并与其它两个MP并行工作 每个MP模件控制系统都独立成为一路,并与其它两个MP MP模件控制系统都独立成为一路 MP并行工作 MP通过TriBus 与相邻的MP进行通讯 MP通过 通过TriBus 与相邻的MP MP进行通讯
安全 紧急停车系统 ESD 安全/紧急停车系统 关键控制 锅炉燃烧管理 火焰及气体监测
正在开拓的新的应用领域:有核电 、交通及其他领域 正在开拓的新的应用领域:
优势5 Worldwide 优势5—Worldwide Coverage 全球覆盖
Triconex offices 办事处 - 美洲 中东 非洲 亚太地区,提供全方位服务 美洲, 中东, 非洲, 亚太地区, 美国以外的商务活动占 美国以外的商务活动占60% 不断的取得各类美国及世界标准,- TUV, CSA, FM, IEC, UL, CE Mark 不断的取得各类美国及世界标准, 公司总部及生产厂都通过了 ISO 9000 认证
Triconex操作手册

8
然后点Find,搜索后,如下图:
发现要找的LT_26121在程序
中,然后在右侧边栏中
找到相应程序并双击,如图:
,就找到了相应变量。
b. 如果知道变量在具体哪个程序中,可以打开该程序,然后快捷键
DDE Server
DDE Server 操作手册
操作手册
操作手册
操作手册.......
.......
.......
...............................
........................
........................
........................1
txt。
如下图所示:
========================================第11页========================================
XXXX XXXXXXXXXXXXXXXXXX
========================================第1页========================================
XXXX XXXXXXXXXXXXXXXXXX
1
XXXX XXXXXXXXXXXXXXXXXX
6
每个逻辑的都注有说明用来解释该逻辑功能,如图所示:
1.4 进入逻辑块
在进入到需要的程序块后,可以通过以下方式进入到每一逻辑块的每
一页程序,选择
可以直接看该逻辑中的某一页程序
TriStation 1131操作手册
TRICON组态作业指导书pdf

TriStation 1131组态作业指导书(主编辑:吕作清)一硬件组态1 创建系统(创建工作平台)方法一:由双击快捷键,进入以下画面。
选择TriStation1131方法二:由开始/所有应用程序/Triconex/TriStation 1131 进入。
进入以下画面,按File/New Project按钮。
选择你要创建的系统,按OK按钮选择项目路径并键入文件名按保存.形成1131的数据库:如何打开一个现有的项目输入默认的用户名: MANAGER和密码: PASSWORD.按登录按钮,项目被打开。
2 硬件组态 进入控制面板A 机架组态: 操作参数设置:机架配置:增加或删除机架.更换主处理器:双击现有的主处理器,弹出画面如下:按Replace MPs钮,弹出画面如下:选中3008,按OK。
出现画面如下:置换成功。
插入和移出卡件:组态通讯卡1、将NCM4329卡件由C1移出,见下图,按Remove按钮。
如:安装在C1S7,则选中此槽位。
按插入按钮,选4329,按OK按钮见下图:按Setup按钮,见下图:填入正确的IP地址如下。
2、EICM组态: 双击COM槽位,见下图。
选中4119A,按OK。
按Setup按钮,对端口1----5进行配置。
3、如何增加机架按Add后,选需要的机架按OK键完成。
4、打开项目菜单,按项目选项。
弹出画面如下:项目选项:当创建新的项目时,要进行语言、注释、颜色的设置。
注释选项:在注释及颜色处打勾。
按确定按钮。
指定监视颜色:5、内存分配. 注意:你的应用下装到控制器以后,要改变内存分配需要整体下装。
双击你要分配的图标编程指导:1 Tristation 1131项目名称文件的命名(Project Name)–如何建立工程项目文件名?(T/C)——(N/T)——(XYZ)(ABCD)T—美元合同;C—人民币合同;N—TRICON控制系统;T—TRIDENT控制系统:XYZ—表明由本公司工程部或售后服务部亲手做的项目,以主机架为单位。
TriStation1131中文培训手册
TriStation_1131中文培训手册TriStation 1131 中文培训手册前言 (5)T RI S TATION 1131版本4.1的新特性: (5)摘要: (6)1.项目管理 (6)1.1.综述 (8)1.2.项目管理步骤 (9)1.3.T RI S TATION 1131安装 (10)1.3.1.系统需求 (11)1.3.2.从以前TriStation 1131版本的升级 (11)1.3.3.安装 TriStation 1131 软件 (11)1.3.4.卸载 TriStation 1131 软件 (12)1.3.5.校验 TriStation 1131 的安装 (12)1.4.T RI S TATION 1131项目 (13)1.4.1.项目Workspace (14)1.4.2.显示项目版本号和文档 (14)1.4.3.把已有项目升级到4.1版 (16)1.4.4.添加旁注 (17)1.5.项目创建 (18)1.5.1.新建一个TriStation 1131项目 (18)1.5.2.添加项目描述 (19)1.5.3.登录到一个已有的项目 (20)1.6.项目选项 (22)1.6.1.语言设定 (22)1.6.2.注释设定 (23)1.6.3.监控BOOL量的颜色 (24)1.7.T RI S TATION 1131选项 (25)1.7.1.指定目录位置 (25)1.7.2.指定制图颜色 (27)1.7.3.指定 FBD(功能块图表)编辑器选项 (27)1.7.4.指定 LD(梯形图)编辑器选项 (28)1.7.5.指定 CEM(因果矩阵)编辑器选项 (30)1.8.用户权限 (31)1.8.1.管理员用户权限 (32)1.8.2.增加和修改用户权限 (33)1.8.3.修改特别的安全级别 (34)1.8.4.修改安全级别名称 (36)1.9.库文档 (37)1.9.1.创建一个项目元素的库 (38)1.9.2.库管理 (41)1.9.3.添加库 (42)1.9.4.升级库 (42)1.9.5.删除库 (43)1.9.6.校验库版本 (43)1.10.报告 (44)1.10.1.升级报告数据库 (44)1.10.2.察看和打印报告 (44)1.10.3.给项目添加用户报告 (46)1.10.4.输出报告 (46)1.10.5.报告数据库信息 (47)前言TriStation 1131™ 开发平台是一款针对Triconex控制器,用来开发、测试、存储危险保护和过程控制的软件。
TRICON功能块说明

功能块左边为输入,右边为输出本说明中引脚所连接的英文为数据类型:BOOL 布尔型DA TE 日期型DINT 双整型DT 日期时间连接型DWORD 双字型INT 整型LREAL 长实数型REAL 实数型STRING 字符型TIME 时间段(如10s)TOD 时间点(如10:03:04.000)WORD 字型STDLIB:功能说明:取绝对值功能说明:输出=arccos(输入),输出单位为弧度。
功能说明:相加求和功能说明:与门功能说明:输出=arcsin(输入),输出单位为弧度。
功能说明:输出=arctan(输入),输出单位为弧度。
功能说明:数据类型转换,将BOOL(数字)型转换成DWORD(双字)型功能说明:输出为大于等于输入的最小整数,转化成实型后的数例:输入为1.1,输出为2.0。
输入为1.0,输出为1.0。
功能说明:将日期和时间连接起来输出例:输入分别为“DA TE#1970-01-02”和“TOD#00:00:00.000”则输出为“DT#1970-01-02-00:00:00.000”功能说明:输出=cos(输入)功能说明:当LD和CD为1时,CV从PV值递减(最小值为-32768),当CV小于等于0时,输出Q变为1。
功能说明:当CU为1时,CV从PV值递增(最大值为32767),当CV大于等于0时,输出Q变为1。
功能说明:当CU为1时,CV从PV值递增(最大值为32767),当CV大于等于0时,输出Q变为1。
当LD和CD为1时,CV从PV值递减(最小值为-32768),当CV小于等于0时,输出Q 变为1。
功能说明:形如“***_TO_***”的都是数据类型转换函数。
功能说明:除法运算功能说明:输入相等,输出为1功能说明:Y等于e的X次方功能说明:Y等于x1的x2次方功能说明:下降沿检测。
在CLK从1变成0时(下降沿),输出一个扫描周期的脉冲。
功能说明:下取整。
输出为小于等于输入的最小整数,转化成实型后的数例:输入为2.8,输出为2.0。
foxboro说明

1.1 Triconex的概述
Tri con ex旗 下 有 T ricon和 Trident两 套 控 制 系 统 ,其 中 Trident更 适 用 于 系 统 比 较 小 的 中 /小 型 现 场 环 境 ,而 Tr i con则 多 用 在 需 要 控 制 的 设 备 比 较 多 的大系统中。它们都是一种现代化的可编程逻辑与过程控制器,可以提供 高水平的系统容错能力的控制器。下面说明容错的概念,并列出TRICON系 统的主要特性。
Triconex 提高了系统的安全性,提供自动检测和确认现场传感器的完整 性,完全的跳闸和控制功能,与管理数据高速公路直接连接,以达到安全回 路功能的连续监控。 b)锅炉火焰安全
在大多数的精炼厂中,过程蒸汽锅炉起一个循环回路部件的功能。为了 保护锅炉,正常启动和停机的安全内锁系统以及锅炉火焰安全系统由 Triconex 系统整合为一体。传统应用中,这些功能由独立的,非整合的部件提供。但
----能耐受严酷的工业环境。 ----能够现场安装,可以在控制器在线使用状态下进行模件一级的修 理工作。I/O模件的更换不会打乱现场布线。 ----能支持多达118个I/O模件(模拟的和数字的)和选装的通讯模件, 该模件可以与Modbus主机和从属机连接,或者和Foxboro与Honeywell分布 控 制 系 统 ( DCS)、其 它 在 Peer— to— Peer网 络 内 的 各 个 TRICON、以 及 在 802 .3 网络上的外部主机相连接。 ----备有组合的支持,可以支持位于远离主机架2公里(1.2英里)以内 的远距I/O模件。 ----可以执行控制程序,该程序按继电器梯级逻辑写成并由一独立的 称作TRISTATION的工作站进行演变和调试。 ----在输入和输出模件内备有智能功能,以使主处理器的工作负荷得 以 减 轻 。 每 个 I/O模 件 都 有 三 个 微 处 理 器 。 输 入 模 件 的 微 处 理 器 对 输 入 进 行过滤和解调,并诊断模件上的硬件故障。输出模件微处理器为输出数据 的表决提供信息、检查来自输出终端的环回数据以使输出能最后有效、并 能诊断现场线路的问题。 ----提供总体的在线诊断,并具有自适应修理能力。 ----可以在TRICON正常运行中进行常规维护而不干扰被控的过程。 ----可支持“热插备件”I/O模件在关键时候的使用,在不可能立即 进行维修的情况下应急。
康吉森tricon SIS功能块用法

AI_FAIL FUNCTION作用本功能模块判断拟输入变量是否超出限制值范围,超出将输出报警信号。
说明本功能块设置了超限报警死区,如输入变量小于下限报警或大于上限报警,功能块输出0,如输入变量大于下限报警恢复值并小于上限报警恢复值,功能块输出1。
变量类型参数类型说明INPUT INPUT DINT A/D input valueINPUT MINIM DINT Minimum Return to Good valueINPUT MAXIM DINT Maximum Return to Good ValueINPUT FAILLO DINT Input fail low setpointINPUT FAILHI DINT Input fail high setpointOUTPUT BOOL Output failAI_SCALE FUNCTION作用本功能块将双整型输入变量转变为实型量输出.说明将一个819-4095之间的双整型数转换为范围在MinReal/ MaxReal之间的实型数.变量类型参数类型说明INPUT RAWIN DINT A/D input valueINPUT MinRaw DINT Minimum Return to Good valueINPUT MaxRaw DINT Maximum Return to Good ValueINPUT MinReal REAL Input minimal engineering unitINPUT MaxReal REAL Input maximal engineering unitINPUT Calib BOOL Are you calibarateOUTPUT REAL Output valueAlm_H FUNCTION作用本功能块将输入变量和设定值比较,并产生报警输出.说明当输入变量大于报警设定值,功能块输出0.当输入变量小于报警设定值和死区的差值后,功能块输出1.变量类型参数类型说明INPUT Input REAL A/D input valueINPUT AlmLimH REAL Hi alm setpointINPUT DB REAL Data base setpointINPUT AlmFB BOOL Input fail low setpointOUTPUT BOOL Output hi almAlm_L FUNCTION(略)作用本功能块将输入变量和设定值比较,并产生报警输出.说明当输入变量小于报警设定值,功能块输出0.当输入变量大于报警设定值和死区的和后,功能块输出1.DEVA FUNCTION作用本功能块对3AI输入信号产生偏差报警(Maximun value - Minimun value) > Engineering span*10%。
SCLIB功能块说明V1.1
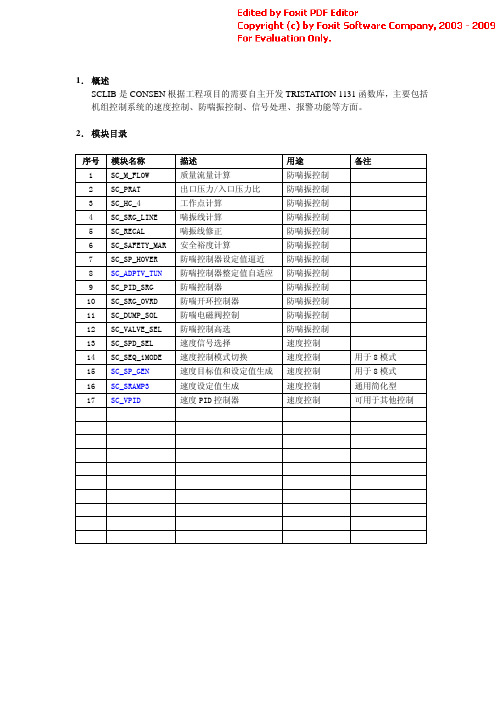
1.概述SCLIB是CONSEN根据工程项目的需要自主开发TRISTATION 1131函数库,主要包括机组控制系统的速度控制、防喘振控制、信号处理、报警功能等方面。
2.模块目录序号 模块名称 描述 用途 备注1 SC_M_FLOW 质量流量计算 防喘振控制2 SC_PRAT 出口压力/入口压力比 防喘振控制3 SC_HC_4 工作点计算 防喘振控制4 SC_SRG_LINE 喘振线计算 防喘振控制5 SC_RECAL 喘振线修正 防喘振控制6 SC_SAFETY_MAR 安全裕度计算 防喘振控制7 SC_SP_HOVER 防喘控制器设定值逼近 防喘振控制8 SC_ADPTV_TUN 防喘控制器整定值自适应 防喘振控制9 SC_PID_SRG 防喘控制器 防喘振控制10 SC_SRG_OVRD 防喘开环控制器 防喘振控制11 SC_DUMP_SOL 防喘电磁阀控制 防喘振控制12 SC_VALVE_SEL 防喘控制高选 防喘振控制13 SC_SPD_SEL 速度信号选择 速度控制14 SC_SEQ_iMODE 速度控制模式切换 速度控制 用于8模式15 SC_SP_GEN 速度目标值和设定值生成 速度控制 用于8模式16 SC_SRAMP3 速度设定值生成 速度控制 通用简化型17 SC_VPID 速度PID控制器 速度控制 可用于其他控制3.模块说明1 SC_M_FLOW2 SC_PRAT3 SC_HC_44 SC_SRG_LINE5 SC_RECAL6 SC_SAFETY_MAR7 SC_SP_HOVER8 SC_ADPTV_TUN9 SC_PID_SRG10 SC_SRG_OVRD11 SC_DUMP_SOL12 SC_VALVE_SEL13 SC_SPD_SEL以上模块参见TRICONEX SGB410的说明小赵,将上面每个分开,插入你写的说明,你觉得有问题的词汇用用红色标出。
14 SC_SEQ_Imode 速度控制模式切换 速度控制 用于8模式本次新开发的调速功能块SEQ_iMODE和SPD_SP_GEN适用于8种模式下的调速过程,8种模式为:iMODE=0 停机iMODE=1 复位iMODE=2 允许启动iMODE=3 暖机1iMODE=4 暖机2iMODE=5 加速iMODE=6 运行iMODE=7 正常停机iMODE=8 超速试验SEQ_iMODE的功能是各模式的切换,并生成个模式下的速度设定值的上、下限和自动方式下的升速速率。
TriconexSOE操作说明
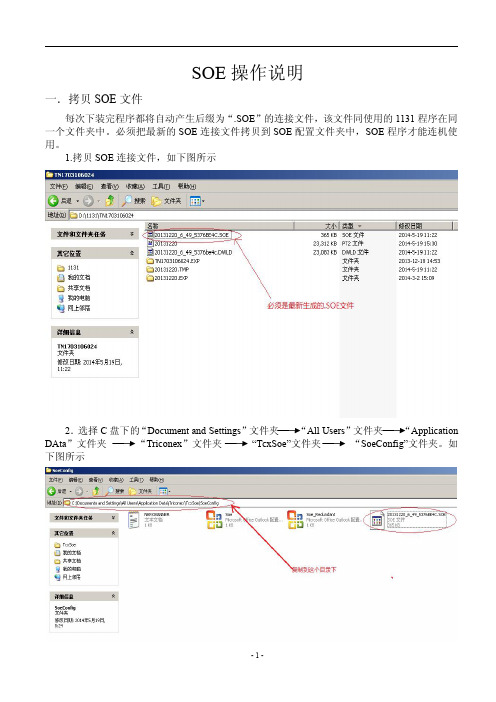
SOE操作说明一.拷贝SOE文件每次下装完程序都将自动产生后缀为“.SOE”的连接文件,该文件同使用的1131程序在同一个文件夹中。
必须把最新的SOE连接文件拷贝到SOE配置文件夹中,SOE程序才能连机使用。
1.拷贝SOE连接文件,如下图所示2.选择C盘下的“Document and Settings”文件夹“All Users”文件夹“Application DAta”文件夹“Triconex”文件夹“TcxSoe”文件夹“SoeConfig”文件夹。
如下图所示二.运行SOE软件点击“开始”“所有程序”“Triconex”“Triconex SOE Recorder”如下图所示弹出如下画面点击“OK”,弹出如下画面在密码处输入该台电脑的系统登录密码,弹出如下窗口三.通讯地址配置1.选择“Tools”“Options”,弹出“Options”窗口,选择“Defauts”(默认值)。
如下窗口2.保留使用的地址,删除不用的地址。
3.选择Modify修改查看节点名和地址。
配置完成四.收集SOE1.点击“File”“New…”,创建一个新的纪录2.创建一个文件名,一般用搜集时间建名,并将该文件保存在D盘下的“SOE”文件夹,以便将来查看。
3.选择SOE连接文件。
如果复制到C盘的.SOE文件不是最新的,则会显示如下窗口,此时软件无法从控制器收集事件记录如果复制到C盘的.SOE文件是最新的,则会显示如下窗口,此时点击按钮,从控制器收集事件记录4.点击运行键开始收集,点击停止键结束收集。
五、查找分析SOE文件为了方便查看SOE待收集结束后,要退出收集,在使用打开文件打开收集的SOE文件进行分析。
1.打开文件,如下图所示2.选择查找工具。
点击菜单栏的“Tools”“Filter and Sort Events…”弹出如下窗口3.过滤器查找方式。
过滤器有时间段、节点、分组、位号与地址和状态等五种过滤方法。
建议使用地址(Alias)过滤的查找方法,这种方法查找简单准确。
ITCC学习工作总结
ITCC学习工作总结感谢领导给了我参加了沈鼓集团自控公司的ITCC(integrated turbine&compressor control system)的培训机会,两周的培训我从以下几方面学到了专门多新的知识并把握了一些技能。
一、深入了解了triconex公司itcc系统ITCC压缩机综合操纵系统,它是集蒸汽透平的速度操纵及抽汽操纵和压缩机防喘振操纵、性能操纵、解耦操纵、负荷分配操纵等机组特有的操纵以及自爱护联锁逻辑操纵为一体的集成综合系统。
大型机组在生产过程中起到心脏的作用,机组综合操纵系统包括:机组联锁ESD、SOE事件顺序记录、机组操纵PID(例如:防喘振操纵及调速操纵等)及常规指示记录功能、故障诊断功能。
1、三重化冗余综合操纵系统三重化模块冗余:系统采纳三重化技术,确实是说:所有重要电路都实现三重化,三重化的每个部分是独立的,但三个部分的功能又完全相同,三重化电路的输出信号在成为系统输出之前,通过一个三取二的表决芯片。
当三个电路中有一路发生故障,输出错误信号,通过三取二表决后该错误信号被屏蔽掉,系统仍旧输出正确的信号(电压、电流或开关状态)。
系统可不能因为内部故障而对过程产生阻碍。
冗余:系统能在线更换模块是三重化技术的必定要求。
在线更换必须达到冗余要求,确实是在不中断正常运行的条件下,系统自动将发生故障模块(主)切换到备用模块,实现冗余功能。
操纵权交给备用模块之后,发生故障的模块能够在线拔出,对故障模块进行爱护。
2、安全系统标准IEC61508是一个有关工业安全系统的国际标准。
它涉及电子、电路以及可编程电子系统,涵盖硬件和软件两个方面。
三重化冗余综合操纵系统必须具备SIL-3级认证,确实是说:当系统中显现一个或者多个故障时,系统能正常运行,同时故障模块能够在线更换。
假如故障超出了系统的容错能力,则系统将按照预先的设定,转为失效—安全模式,确保用户生产装置和设备的安全。
这种设计适用于高可靠性、高可用度以及对系统在线时刻要求专门高的应用场合,例如:石油、化工、冶金等大型机组综合操纵系统应用场合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
序号
I/O 类型参数名
参数类型描述备注
1IN RAW_IN DINT PV值AI输入2IN MAX_ENG REAL PV值量程高限3IN MIN_ENG REAL PV值量程低限4IN HH_SP REAL SP高高设定值5IN H_SP REAL SP高设定值6IN L_SP REAL SP低低设定值7IN LL_SP REAL SP低设定值8IN DB
REAL 死区9IN STANDBY_EN BOOL 退守使能 1:使能 0:禁用10IN STANDBY_ENG BOOL 退守值11OUT ENG_VALUE REAL PV值
12OUT INV BOOL
无效报警 当RAW_IN>4299或RAW_IN<768时,
INV=0
13OUT HH BOOL 高高报警14OUT H BOOL 高报警15OUT L BOOL 低报警16
OUT
LL
BOOL 低低报警
序号I/O 类型参数名
参数类型描述备注
1IN RAW_IN DINT PV值AI输入2IN MAX_ENG REAL PV值量程高限3IN MIN_ENG REAL PV值量程低限4IN HH_SP REAL SP高高设定值5IN H_SP REAL SP高设定值6IN L_SP REAL SP低低设定值7IN LL_SP REAL SP低设定值8IN DB
REAL 死区9IN STANDBY_EN BOOL 退守使能 1:使能 0:禁用10IN STANDBY_ENG BOOL 退守值11OUT ENG_VALUE REAL PV值
12OUT INV BOOL
无效报警 当RAW_IN>4299或RAW_IN<768时,
INV=0
13OUT HH BOOL 高高报警14OUT H BOOL 高报警15OUT L BOOL 低报警16
OUT
LL
BOOL 低低报警
AI_PROC(模拟量输入处理模块_带开方)0:报警
0:报警
2
3
AI_PROC(模拟量输入处理模块)
序号I/O类型参数名参数类型描述备注
1IN CI BOOL 模块使能 1:使能,模块正常使用 0:模块被禁用,CO=0,除CO外的所有输出保持当前值
2IN FAILSPD REAL转速测量最低有效值
3IN ENPUFL BOOL 转速故障使能 1:所有使能的转速信号且大于FAILSPD值的转速信号参与转速信号计算 0:所有使能的转速信号都参与计算且输出最大转速值
4IN PU1REAL转速测量信号1输入
5IN PU2REAL转速测量信号2输入
6IN PU3REAL转速测量信号3输入
7IN PU4REAL转速测量信号4输入
8IN PUDIS1BOOL转速测量信号1使能 1:禁用 0:使能9IN PUDIS2BOOL转速测量信号2使能 1:禁用 0:使能10IN PUDIS3BOOL转速测量信号3使能 1:禁用 0:使能11IN PUDIS4BOOL转速测量信号4使能 1:禁用 0:使能
12OUT CO BOOL 模块使能 1:使能,模块正常使用 0:模块被禁用,CO=0,除CO外的所有输出保持当前值
13OUT PUFL1BOOL转速测量信号1故障报警14OUT PUFL2BOOL转速测量信号2故障报警15OUT PUFL3BOOL转速测量信号3故障报警16OUT PUFL4BOOL转速测量信号4故障报警
17OUT LOSTSPD BOOL 转速丢失报警 当所有转速都为故障或所有转速都被禁用时LOSTSPD=1
18OUT SELSPD REAL转速选择输出
19OUT SELINDEX DINT 转速信号选择指示 当所有转速丢失或都被禁用时SELINDEX=0
20OUT SPDDIF REAL最大转速与最小转速之差
序号I/O类型参数名参数类型描述备注
1IN G BOOL 选择输入使能 G=0时 输出为IN0;G=1时 输出为IN1
2IN IN0ANY输入IN0 3IN IN1ANY输入IN1当转速信号低于FAILSPD时为1
SPD_SELECT03(转速选择处理模块)4
5SEL(选择处理模块)
序号
I/O 类型参数名
参数类型描述备注
1IN
CONST_MAR REAL 操作员安全边界裕度常数2IN
PROP_MAR REAL 操作员安全边界裕度比例3IN
rSULIN REAL 喘振线
序号
I/O 类型参数名
参数类型描述备注
1IN/OUT CV DINT 防喘振PID输出2IN SP
REAL 设定点(操作员安全边界)3IN PV
REAL PV测量值(实际运行边界)4IN GAIN REAL 比例调节5IN RESET REAL 积分调节(每分钟的积分次数)6IN DER
REAL 微分调节7IN DIR_ACTION REAL PID作用方式 0:反向PID
8OUT
CO
BOOL
PID_SRG03(防喘振PID模块)SAFETY_MAR(操作员安全边界模块)9
8
序号
I/O 类型参数名
参数类型描述备注
1IN
TOTAL_SAFETY REAL 总安全边界2IN MARGIN REAL 实际运行边界
3IN kHOVER
REAL
盘旋线与运行点之间的距离(盘旋跟踪的使能距离)
4IN kHOV_INC REAL 运行点向左靠时盘旋线往回跟踪的速度5
IN
FEEDBACK
REAL 输出反馈
序号I/O 类型参数名
参数类型描述备注
1IN TOTAL_SAFETY REAL 总安全边界2IN MARGIN
REAL 实际运行边界3IN kSO_ENB
REAL 喘振超驰控制使能线4IN Kso_MAX REAL 喘振超驰控制最大输出5IN
Test_Mar
REAL 测试
Srg_Ovrd03(喘振超驰控制模块)SP_Hover02(喘振盘旋线处理模块)10
11
序号
I/O 类型参数名
参数类型描述备注
1IN NORMAL REAL 正常调整值2IN SETPOINT REAL 设定点3IN MARGIN REAL 实际运行边界4IN BRKPT1REAL 断点15IN RISE1REAL 斜坡16IN BRKPT2REAL 断点27IN RISE2REAL 斜坡28IN ENABLE
BOOL 模块控制使能9IN Limit1REAL 限值110IN
Limit2
REAL 限值2
ADPTV_TUN03(自适应调整模块)12
序号I/O类型参数名参数类型描述备注
1IN/OUT SRG_PID REAL防喘振PID防喘振控制策略
2IN/OUT SRG_OVRD REAL防喘振超驰
3IN/OUT PROC_OVRD REAL过程超驰
4IN/OUT MAN_DMD REAL防喘振手操
5IN/OUT AUTO BOOL防喘振自动
6IN FULL_AUTH BOOL防喘振手动
7IN SRG_ENB BOOL防喘振使能
8IN MAX_OUT REAL防喘振最大输出
9IN SLEW_OPEN REAL防喘振开阀输出斜坡
10IN SLEW_CLSD REAL防喘振关阀输出斜坡
11IN SLEW_DB REAL防喘振输出死区
12IN STRT_RMP REAL防喘振启动斜坡
13IN VALVE_FB REAL防喘振输出反馈
14IN FAIL BOOL防喘振错误报警使能
15IN Fail_Safe REAL防喘振错误输出的安全值
16IN Windup_DB REAL防积分饱和
17OUT VLV_DMD REAL防喘振输出
18OUT VLV_DER REAL防喘振输出与上一个扫描时间输出的偏差19OUT fSRG_PID BOOL输出为防喘振PID
20OUT fSRG_OVRD BOOL输出为防喘振超驰控制
21OUT fPROC_OVD BOOL输出为过程超驰控制
22OUT fMAN_OVD BOOL输出为防喘振手动输出AUTO=1为全自动,输出为除手操的高;AUTO=0且FULL_AUTH=1,输出为手操;AUTO=0且
FULL_AUTH=0,输出为全部输入的高值。
13Valve_Sel06(防喘振输出模块)。