311573_坐标正算、反算、角度转换(新增了转换十进制角度
坐标正反算定义及公式
第六章→第三节→导线测量内业计算导线计算的目的是要计算出导线点的坐标,计算导线测量的精度是否满足要求。
首先要查实起算点的坐标、起始边的方位角,校核外业观测资料,确保外业资料的计算正确、合格无误。
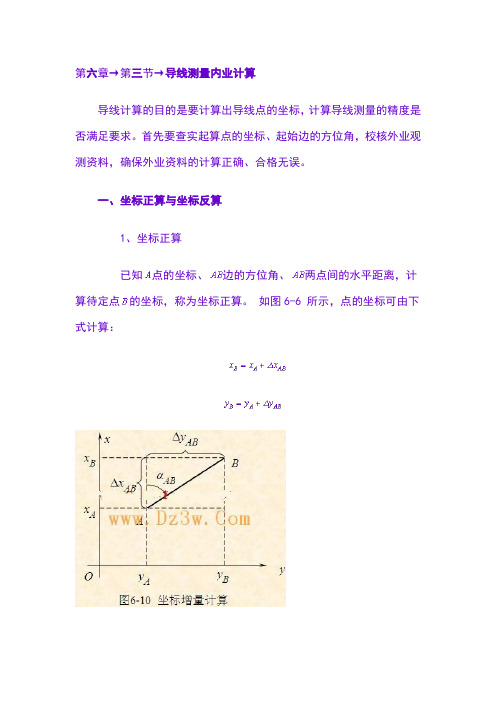
一、坐标正算与坐标反算1、坐标正算已知点的坐标、边的方位角、两点间的水平距离,计算待定点的坐标,称为坐标正算。
如图6-6 所示,点的坐标可由下式计算:式中、为两导线点坐标之差,称为坐标增量,即:【例题6-1】已知点A坐标,=1000、=1000、方位角=35°17'",两点水平距离=,计算点的坐标?35o17'"=35o17'"=2、坐标反算已知两点的坐标,计算两点的水平距离与坐标方位角,称为坐标反算。
如图6-6可知,由下式计算水平距离与坐标方位角。
(6-3)(6-4)式中反正切函数的值域是-90°~+90°,而坐标方位角为0°~360°,因此坐标方位角的值,可根据、的正负号所在象限,将反正切角值换算为坐标方位角。
【例题6-2】=、=、=、=,计算坐标方位角计算坐标方位角、水平距离。
=62°09'"+180°=242°09'"注意:一直线有两个方向,存在两个方位角,式中:、的计算是过A点坐标纵轴至直线的坐标方位角,若所求坐标方位角为,则应是A点坐标减点坐标。
坐标正算与反算,可以利用普通科学电子计算器的极坐标和直角坐标相互转换功能计算,普通科学电子计算器的类型比较多,操作方法不相同,下面介绍一种方法。
【例题6-3】坐标反算,已知=、=、=、=,试计算坐标方位角、水平距离。
键入按等号键[=]等于纵坐标增量,按储存键[],键入按等号键[=]等于横坐标增量,按[]键输入,按[]显示横坐标增量,按[]键输入,按第二功能键[2ndF],再按[]键,屏显为距离,再按[]键,屏显为方位角。
【例题6-4】坐标正算,已知坐标方位角=294°42'51",=,试计算纵坐标增量横坐标增量。
坐标正反算定义及公式

坐标正反算定义及公式一、坐标正算(地理坐标转平面坐标)坐标正算是将地球上的地理坐标(经纬度)转换为平面坐标(笛卡尔坐标或者极坐标)。
坐标正算是地图制图的一项基本工作。
1.大地参考椭球体模型在进行坐标正算之前,需要先定义一个大地参考椭球体模型,用于近似地球的形状。
常用的大地参考椭球体模型有WGS84、北京54等。
这些模型定义了地球的椭球体参数,如长半轴、扁率等。
2.经度、纬度的度分秒表示法地理坐标通常使用度分秒表示法来表示经度和纬度。
经度是以东西方向为正负,以本初子午线(通常是格林威治子午线)为基准;纬度是以南北方向为正负,以赤道为基准。
3.大地坐标系和平面坐标系大地坐标系是地球表面的经纬度坐标系,平面坐标系是一个笛卡尔坐标系或者极坐标系,用于表示地球表面的平面位置。
4.坐标正算公式坐标正算的公式根据大地参考椭球体模型的不同而有所不同,这里以WGS84椭球体模型为例。
假设待转换的地理坐标是经度λ、纬度φ,转换后的平面坐标是X、Y。
首先,计算出椭球体的参数e:e=√(a^2-b^2)/a其中,a是椭球体的长半轴,b是椭球体的短半轴。
然后,计算出曲率半径N:N = a / √(1 - e^2 * sin^2(φ))接着,计算出当前点的平面坐标:X = (N + h) * cos(φ) * cos(λ)Y = (N + h) * cos(φ) * sin(λ)其中,h是当前点的海拔高度。
以上就是坐标正算的基本公式,可以将地理坐标转换为平面坐标。
二、坐标反算(平面坐标转地理坐标)坐标反算是将平面坐标(笛卡尔坐标或者极坐标)转换为地理坐标(经纬度)。
坐标反算是地图制图或者位置定位的一项重要工作。
1.平面坐标的原点和单位平面坐标通常以其中一点为原点,单位长度为米或者其他距离单位。
原点可以在任意位置,但是通常选择区域的中心或者其中一突出地物为原点。
2.坐标反算的过程坐标反算的过程是根据平面坐标和大地参考椭球体模型,计算出对应的地理坐标。
坐标反算正算计算公式-推荐下载

两角和公式 sin(A+B) = siபைடு நூலகம்AcosB+cosAsinB
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术关,系电通,力1根保过据护管生高线产中0不工资仅艺料可高试以中卷解资配决料置吊试技顶卷术层要是配求指置,机不对组规电在范气进高设行中备继资进电料行保试空护卷载高问与中题带资2负料2,荷试而下卷且高总可中体保资配障料置2试时32卷,3各调需类控要管试在路验最习;大题对限到设度位备内。进来在行确管调保路整机敷使组设其高过在中程正资1常料中工试,况卷要下安加与全强过,看度并25工且52作尽22下可护都能1关可地于以缩管正小路常故高工障中作高资;中料对资试于料卷继试连电卷接保破管护坏口进范处行围理整,高核或中对者资定对料值某试,些卷审异弯核常扁与高度校中固对资定图料盒纸试位,卷置编工.写况保复进护杂行层设自防备动腐与处跨装理接置,地高尤线中其弯资要曲料避半试免径卷错标调误高试高等方中,案资要,料求编试技5写、卷术重电保交要气护底设设装。备备置管4高调、动线中试电作敷资高气,设料中课并技3试资件且、术卷料中拒管试试调绝路包验卷试动敷含方技作设线案术,技槽以来术、及避管系免架统不等启必多动要项方高方案中式;资,对料为整试解套卷决启突高动然中过停语程机文中。电高因气中此课资,件料电中试力管卷高壁电中薄气资、设料接备试口进卷不行保严调护等试装问工置题作调,并试合且技理进术利行,用过要管关求线运电敷行力设高保技中护术资装。料置线试做缆卷到敷技准设术确原指灵则导活:。。在对对分于于线调差盒试动处过保,程护当中装不高置同中高电资中压料资回试料路卷试交技卷叉术调时问试,题技应,术采作是用为指金调发属试电隔人机板员一进,变行需压隔要器开在组处事在理前发;掌生同握内一图部线纸故槽资障内料时,、,强设需电备要回制进路造行须厂外同家部时出电切具源断高高习中中题资资电料料源试试,卷卷线试切缆验除敷报从设告而完与采毕相用,关高要技中进术资行资料检料试查,卷和并主检且要测了保处解护理现装。场置设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
测量坐标正反算公式是什么

测量坐标正反算公式是什么引言在测量领域中,坐标正反算是一种常用的计算方法,用于将实际测量值转换为地理坐标或者将地理坐标转换为实际测量值。
本文将介绍测量坐标正反算的基本原理和公式,并通过示例进行说明。
坐标正算坐标正算是将实际测量值(如长度、角度等)转换为地理坐标的过程。
在进行坐标正算时,通常需要已知一些控制点的地理坐标,并通过测量的实际值来计算待测点的地理坐标。
点的水平坐标正算对于点的水平坐标正算,通常使用以下公式:X = X₀ + ∑(Di * cos ai)Y = Y₀ + ∑(Di * sin ai)其中,X₀和Y₀为已知控制点的地理坐标,Di为待测点到控制点的实测距离,ai 为待测点到控制点的真方位角(或差角)。
点的高程坐标正算对于点的高程坐标正算,通常使用以下公式:Z = Z₀ + ∑(Hi)其中,Z₀为已知控制点的高程坐标,Hi为待测点到控制点的高差。
坐标反算坐标反算是将已知的地理坐标转换为实际测量值的过程。
在进行坐标反算时,通常需要已知一些控制点的地理坐标,并通过测量待测点与已知控制点的实际值来计算实际测量值。
点的水平坐标反算点的水平坐标反算根据已知的控制点的地理坐标和实测距离,计算待测点与已知控制点的方位角(或差角)和距离。
其中,方位角可使用以下公式计算:tan α = (Y-Y₀) / (X-X₀)其中,X₀和Y₀为已知控制点的地理坐标,α为待测点到控制点的方位角。
待测点的距离可以使用以下公式计算:D = √((X-X₀)² + (Y-Y₀)²)点的高程坐标反算点的高程坐标反算根据已知的控制点的高程坐标和实测高差,计算待测点与已知控制点的高差。
已知控制点的高程坐标和高差可以通过以下公式计算:Hi = Z-Z₀其中,Z₀为已知控制点的高程坐标,Hi为待测点到控制点的高差。
示例为了更好地理解坐标正反算的原理,这里给出一个示例。
假设有一个测量任务,要求测量某点A的地理坐标。
坐标正算、反算、角度转换

点 号 输 入 点 名 X坐标(N) Y坐标(E) H高程/m 高差/m Hoa=Ho-Ha O-A平距/m O-B平距/m A-B平距/m 方向角OA(度) 方向角OB(度)
测站 4# 点:O 后视 5# 点:A
3830701.7990
474971.1480
0.0000
夹
角 AOB
分 秒
角
OB在OA 定向线 左右侧
度 度
[蓝色单元格]。3、输入坐标 调整。5、表格中高程和XY坐 本人联系修改。7、对excel进 能力有限,若有逻辑关系错误 ,拷贝于手机打开时需看手机
-90.0000000000
左旋 90 0 0.00
负 值 60 取 整
进 制 值
仪器转动 方向(以 角 站立于测 站面向后 视点,自 身左右)
4m Hab=Ha-Hb
0.0000
×
此 十 十 列 进 进 后视点到放样点距 求 60 进 制 60 进 制 备 正 北 值 正 东 值 后视方向线 前视方向线 制 制 离 反 角 值 角 值 单位:m 单位:m 注 角 角 正 度 度 切 值 使用说明:1、蓝色单元格为用户填入,红色单元格为对应项的结果。蓝色单元格外,其余单元格不要随意改动!2、直接输入站名(不影响计算)、X、Y、H[蓝
0.0000
度 分
秒
度 分
秒
3830617.9990
474971.1480
0.0000
高差/m Hob=Ho-Hb
0.0000 83.8000 187.6000 205.4658
×
180.0000000000
90.0000000000
180 0
角度、坐标测量计算公式细则

计算细则1、坐标计算:X1=X+Dcosα,Y1=Y+Dsinα。
式中 Y、X为已知坐标,D为两点之间的距离,Α为方位角。
2、方位角计算:1)、方位角=tan=两坐标增量的比值,然后用计算器按出他们的反三角函数(±号判断象限)。
2)、方位角:arctan(y2-y1)/(x2-x1)。
加减180(大于180就减去180(还大于360就在减去360)、小于180就加180 如果x轴坐标增量为负数,则结果加180°。
如果为正数,则看y轴的坐标增量,如果Y轴上的结果为正,则算出来的结果就是两点间的方位角,如果为负值,加360°。
S=√(y2-y1)+(x2-x1),1)、当y2-y1>0,x2-x1>0时;α=arctan(y2-y1)/(x2-x1)。
2)、当y2-y1<0,x2-x1>0时;α=360°+arctan(y2-y1)/(x2-x1)。
3)、当x2-x1<0时;α=180°+arctan(y2-y1)/(x2-x1)。
再用两点之间的距离公式可算距离(根号下两个坐标距离差的平方相加)。
拨角:arctan(y2-y1)/(x2-x1)1、例如:两条巷道要互相平行掘进的话,求它们的拨角:方法(前视边方位角减后视边方位)在此后视边方位要加减180°,若拨角结果为负值为左偏“逆时针”(+360°就可化为右偏,正值为右偏“顺时针”。
2、在图上标识方位的方法:就是导线边与Y轴的夹角。
3、高程计算:目标高程=测点高程+?h+仪器高—占标高。
4、直角坐标与极坐标的换算:(直角坐标用坐标增量表示;极坐标用方位角和边长表示) 1)、坐标正算(极坐标化为直角坐标)已知一个点的坐标及该点至未知点的距离和方位角,计算未知点坐标方位角,知A(Xa,Ya)、Sab、αab,求B(Xa,Ya)解:?Xab=Sab×COSαab 则有Xb=Xa+?Xab?Yab=Sab×SINαab Yb=Ya+?Yab2)、坐标反算,已知两点的坐标,求两点的距离(称反算边长)和方位角(称反算方位角)的方法已知A(Xa,Ya)、B(Xb,Yb),求αab、Sab。
坐标正反算计算程序

坐标正反算计算程序在进行坐标正反算计算之前,需要先了解一些基本概念和公式:1.大地坐标系:大地坐标系是用经纬度表示地球表面上的点的坐标系统,其中经度表示东西方向的位置,纬度表示南北方向的位置。
2.平面坐标系:平面坐标系是用平面直角坐标系表示地球上的点的坐标系统,其中X轴表示东西方向的位置,Y轴表示南北方向的位置。
3.椭球坐标参数:椭球坐标参数包括椭球体长半轴a、短半轴b和偏心率e等参数,用来描述地球表面的形状。
4.大地坐标与平面坐标的转换公式:-大地坐标转平面坐标:平面X坐标 = N * (cosB * (L - L0))平面Y坐标 = M + N * sinB * tan(B - B0)-平面坐标转大地坐标:B=B0+(Y-M)/NL = L0 + X / (N * cosB)H = (N / cosB) - N其中,N、M、B0、L0分别代表椭球的参数计算中的一些辅助数值,H 代表大地高。
下面是一个示例的坐标正反算计算程序:```pythonimport mathclass CoordinateConverter:def __init__(self, a, b, e, lon_origin, lat_origin):self.a = aself.b = bself.e = eself.lon_origin = lon_origint_origin = lat_origindef geodetic_to_plane(self, lon, lat):lon_diff = lon - self.lon_originM = self.a * (1 - self.e ** 2) / (1 - self.e ** 2 * math.sin(t_origin) ** 2) ** 1.5N = self.a / math.sqrt(1 - self.e ** 2 *math.sin(t_origin) ** 2)X = N * math.cos(t_origin) * lon_diffY = M + N * math.sin(t_origin) * math.tan(lat - t_origin)return X, Ydef plane_to_geodetic(self, X, Y):M = self.a * (1 - self.e ** 2) / (1 - self.e ** 2 *math.sin(t_origin) ** 2) ** 1.5N = self.a / math.sqrt(1 - self.e ** 2 *math.sin(t_origin) ** 2)lat = t_origin + (Y - M) / Nlon = self.lon_origin + X / (N * math.cos(lat))H = (N / math.cos(lat)) - Nreturn lon, lat, H#示例用法#大地坐标转平面坐标X, Y = converter.geodetic_to_plane(lon=121, lat=41)print("平面坐标:", X, Y)#平面坐标转大地坐标print("大地坐标:", lon, lat, H)```注意:在实际使用时,需要根据具体的椭球参数和坐标系定义进行适当修改,以满足实际需求。
坐标正反算

坐标正反算1. 前言坐标正反算是在测量和导航领域中常用的技术,用于在地球上确定位置的过程。
正算是根据已知参数计算给定地点的坐标,反算则是根据已知地点的坐标计算相应的参数。
本文将介绍坐标正反算的基本原理和常用方法。
2. 坐标系统为了确定地球上任意点的位置,使用了不同的坐标系统。
最常用的是地理坐标系(经纬度坐标系)和平面坐标系(如UTM坐标系)。
地理坐标系使用经度和纬度表示一个点的位置,而平面坐标系使用坐标轴上的数值表示。
坐标系统的选择取决于具体的应用需求和地理区域。
例如,地理坐标系常用于导航和地图制作,而平面坐标系则常用于测量和土地调查。
3. 坐标正算坐标正算是根据已知的参数计算给定点的坐标。
例如,在地理坐标系中,已知一个点的经度和纬度,可以通过正算计算出该点在地球上的位置。
正算的具体方法根据不同的坐标系统而异。
在地理坐标系中,常用的正算方法是球面三角法和大地测量学方法。
而在平面坐标系中,使用的方法通常是基于平面几何原理的。
4. 坐标反算坐标反算是根据已知的地点坐标计算相应的参数。
例如,在地理坐标系中,已知两个点的经纬度坐标,可以通过反算计算出这两个点之间的距离和方位角。
坐标反算的方法也因不同的坐标系统而异。
在地理坐标系中,常用的反算方法包括球面三角法和大地测量学方法。
在平面坐标系中,反算的方法则通常是基于平面几何原理的。
5. 常用工具和软件进行坐标正反算时,可以使用许多工具和软件来简化计算过程。
一些常用的工具包括地图和测量仪器,如全球定位系统(GPS)。
此外,还有一些专门用于坐标正反算的软件,如ArcGIS、AutoCAD和Google Earth等。
这些软件提供了各种功能和工具,可以帮助用户进行精确的正反算计算。
6. 总结坐标正反算是在测量和导航领域中常用的技术,在确定地球上任意点的位置和计算相关参数时发挥着重要作用。
本文介绍了坐标正反算的基本原理和常用方法,以及一些常用工具和软件。
虽然坐标正反算在实际应用中可能会更加复杂和多样化,但通过理解基本原理和使用适当的工具,可以更有效地进行坐标计算和位置确定。
坐标正算反算公式讲解

坐标正算反算公式讲解坐标正算和反算是地理信息系统(GIS)中两个常用的操作,用于将地理坐标转换为平面坐标(正算)或将平面坐标转换为地理坐标(反算)。
这两个操作在测量、绘图、导航、定位等领域都有广泛的应用。
下面是对坐标正算和反算公式的详细讲解。
一、坐标正算公式坐标正算是将地理坐标(经纬度)转换为平面坐标(XY坐标)。
在坐标正算中,我们需要用到投影坐标系和大地坐标系之间的转换公式。
1.地理坐标系地理坐标系使用经度和纬度来表示地球上的点。
经度是指从地球圆心到其中一点的经线弧度长度与赤道弧度长度的比值,范围为-180到180度;纬度是指从地球赤道到其中一点的纬线弧度长度与半径的比值,范围为-90到90度。
2.投影坐标系投影坐标系是将地理坐标投影到平面坐标系上的一种方法。
根据需要,可以选择不同的投影方式,例如等角、等面积、等距、等分四类等。
每个投影方式都有其特点,选用不同的投影方式可以满足不同的需求。
3.原理坐标正算的原理是根据地理坐标系中点的经纬度和投影坐标系中原点的经纬度之间的差异,通过一定的计算公式将地理坐标系中的点坐标转换为投影坐标系中的点坐标。
4.具体步骤(1)选择合适的投影坐标系,确定原点和偏移量。
(2)计算地理坐标系中点的经纬度与原点经纬度的差值。
(3)利用投影坐标系的转换公式,将差值转换为平面坐标。
5.常用坐标正算公式常用的坐标正算公式包括高程改正公式、大地坐标系转换公式、高斯投影正算公式等。
二、坐标反算公式坐标反算是将平面坐标(XY坐标)转换为地理坐标(经纬度)。
在坐标反算中,我们需要用到投影坐标系和大地坐标系之间的反转换公式。
1.原理坐标反算的原理是根据投影坐标系中点的坐标和大地坐标系中原点的经纬度之间的差异,通过一定的计算公式将平面坐标系中的点坐标转换为地理坐标系中的点坐标。
2.具体步骤(1)选择合适的投影坐标系,确定原点和偏移量。
(2)计算平面坐标系中点的坐标与原点坐标的差值。
(3)利用投影坐标系的反转换公式,将差值转换为地理坐标。
学生用计算器坐标正反算

学生用计算器坐标正反算计算器是一种可以进行数学运算的电子设备,它能够对数值进行正向计算和逆向计算。
在学生的日常学习中,计算器是一种常用的工具,可以帮助学生完成各种数学题目的计算。
其中,坐标的正反算是学生使用计算器的常见应用之一坐标的正反算指的是在给定一个坐标值的情况下,通过计算器进行正向或者逆向的运算。
在数学中,坐标通常表示为一个有序数对的形式,例如(x,y)。
其中x表示点在水平轴上的位置,y表示点在垂直轴上的位置。
正向运算通常指的是已知点的坐标值,求解点在坐标轴上的位置;逆向运算指的是已知点在坐标轴上的位置,求解点的坐标值。
在进行坐标正反算时,学生可以使用计算器上的函数或者操作符进行运算。
以下是一些常见的操作符和函数:1.输入操作符:计算器上通常有数字和运算符的按键,学生可以通过按下对应的按钮来输入数字和符号。
2.四则运算:计算器可以进行基本的四则运算,包括加、减、乘、除等。
例如,学生可以输入“5+3”,计算器会返回结果“8”。
3.平方和开方:计算器通常具有求平方和开方的功能。
学生可以通过输入数字和相应的操作符来进行平方和开方运算。
4.三角函数:计算器上通常有正弦、余弦、正切等三角函数的按钮。
学生可以在计算器上输入角度值,然后按下相应的按钮来计算三角函数的值。
5.括号:计算器上通常有左括号和右括号的按钮,学生可以使用括号来改变运算的优先级。
在进行坐标的正反算时,学生可以根据题目的具体要求来选择合适的函数和操作符。
下面分别介绍正向计算和逆向计算的方法。
1.正向计算:正向计算是在已知点的坐标值的情况下,求解点在坐标轴上的位置。
在正向计算时,学生可以使用计算器上的加、减、乘、除等操作符进行运算。
例如,已知点A的坐标为(3,4),求解点A在坐标轴上的位置。
学生可以通过计算器的加法运算符来计算出点A在水平轴上的位置是3,通过计算器的减法运算符来计算出点A在垂直轴上的位置是42.逆向计算:逆向计算是在已知点在坐标轴上的位置的情况下,求解点的坐标值。
坐标正算反算计算公式

坐标正算反算计算公式--------------------------------------------------------------------------------本文介绍基本的坐标计算公式1.坐标正算根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。
如图6-10所示,已知直线AB起点A的坐标为(xA,yA),AB边的边长及坐标方位角分别为DAB和αAB,需计算直线终点B的坐标。
附:导线的载流量对照表。
直线两端点A、B的坐标值之差,称为坐标增量,用ΔxAB、ΔyAB表示。
由图6-10可看出坐标增量的计算公式为:坐标增量计算公式根据式(6-1)计算坐标增量时,sin和cos函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。
坐标增量正、负号的规律如表6-5所示。
表6-5 坐标增量正、负号的规律则B点坐标的计算公式为:2.坐标反算根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。
如图6-10所示,已知直线AB两端点的坐标分别为(xA,yA)和(xB,yB),则直线边长DAB和坐标方位角αAB的计算公式为:坐标正算计算公式应该注意的是坐标方位角的角值范围在0˚~360˚间,而arctan函数的角值范围在-90˚~+90˚间,两者是不一致的。
按式(6-4)计算坐标方位角时,计算出的是象限角,因此,应根据坐标增量Δx、Δy的正、负号,按表6-5决定其所在象限,再把象限角换算成相应的坐标方位角。
例6-2 已知A、B两点的坐标分别为直线边长DAB和坐标方位角αAB计算公式:试计算AB的边长及坐标方位角。
解计算A、B两点的坐标增量。
测量坐标正反算公式

测量坐标正反算公式在测量学中,坐标正反算公式是一种常用的计算方法,用于在测量过程中进行坐标值的转换和计算。
通过坐标正反算公式,可以将测量点的坐标值进行转化,从而得到更加准确和可靠的测量结果。
1. 坐标正算坐标正算是指通过已知的控制点坐标和测量数据,计算出其他未知点的坐标值。
坐标正算一般涉及到测量仪器的观测数据、观测角度和测量点的距离等信息。
坐标正算的基本原理是根据已知控制点的坐标,通过观测数据和测量原理,进行一系列计算和推导,得到待测点的坐标值。
坐标正算的公式可以表示为:X = X0 + ∑(Ri * sinθi * cosαi)Y = Y0 + ∑(Ri * sinθi * sinαi)Z = Z0 + ∑(Ri * cosθi)其中,X、Y、Z分别表示待测点的坐标值,X0、Y0、Z0表示已知控制点的坐标值,Ri表示测量点与控制点的距离,θi表示测量点与控制点的垂直角,αi表示测量点与控制点的水平角。
坐标正算的步骤主要包括:1.根据已知控制点的坐标值,计算观测点与控制点的距离和方向角;2.根据观测数据和测量原理,计算待测点与控制点的垂直角和水平角;3.根据坐标正算公式,进行计算,得到待测点的坐标值。
2. 坐标反算坐标反算是指通过已知的控制点坐标和测量数据,计算出观测点与控制点之间的距离和方向角。
坐标反算常用于测量点在平面内或空间中的相对位置计算。
坐标反算的基本原理是根据已知控制点的坐标,通过观测数据和测量原理,进行一系列计算和推导,得到观测点与控制点之间的距离和方向角。
坐标反算的公式可以表示为:Ri = √((X - X0)² + (Y - Y0)² + (Z - Z0)²)θi = arccos((Z - Z0) / Ri)αi = arctan((Y - Y0) / (X - X0))其中,Ri表示观测点与控制点的距离,θi表示观测点与控制点的垂直角,αi表示观测点与控制点的水平角,X、Y、Z分别表示观测点的坐标值,X0、Y0、Z0表示已知控制点的坐标值。
坐标正反算公式范文

坐标正反算公式范文一、坐标正算(后方交汇计算):已知起点坐标及观测角度和距离的情况下,求目标点的坐标。
1.观测角度求目标点坐标:在测量中,常常通过角度观测来确定目标点的坐标。
如果已知起点坐标和观测角度,可以通过以下公式求解目标点的坐标:X = X0 + L * sin(α + θ)Y = Y0 + L * cos(α + θ)其中,X0和Y0是起点的坐标,L为观测点到起点的距离,α为起点和观测点之间的方位角,θ为观测角度。
2.观测距离求目标点坐标:在一些情况下,可以通过观测距离来确定目标点的坐标。
已知起点坐标和观测距离的情况下,可以通过以下公式求解目标点的坐标:X = X0 + L * sinαY = Y0 + L * cosα其中,X0和Y0是起点的坐标,L为观测点到起点的距离,α为起点和观测点之间的方位角。
3.观测角度和距离求目标点坐标:在一些情况下,需要同时使用观测角度和观测距离来确定目标点的坐标。
已知起点坐标、观测角度和观测距离的情况下,可以通过以下公式求解目标点的坐标:X = X0 + (L * sinθ)/ sinαY = Y0 + (L * cosθ)/ cosα其中,X0和Y0是起点的坐标,L为观测点到起点的距离,α为起点和观测点之间的方位角,θ为观测角度。
二、坐标反算(前方交汇计算):已知起点坐标和目标点坐标或两点坐标之间的距离和角度的情况下,求观测角度和距离。
1.目标点坐标求观测角度和距离:当已知起点坐标和目标点坐标时,可以通过以下公式求解观测角度和距离:L=√((X-X0)^2+(Y-Y0)^2)tanα = (X - X0) / (Y - Y0)θ = atan((X - X0) / (Y - Y0)) - α其中,X0和Y0是起点的坐标,X和Y是目标点的坐标,L为目标点到起点的距离,α为起点和观测点之间的方位角,θ为观测角度。
2.两点坐标之间的距离和角度求观测角度和距离:当已知起点坐标、目标点坐标和两点之间的距离时,可以通过以下公式求解观测角度和距离:L=√(a^2+b^2)sinθ = a / Lcosθ = b / Ltanα = a / b其中,a和b分别为起点和目标点之间的ΔX和ΔY坐标差,L为目标点到起点的距离,α为起点和观测点之间的方位角,θ为观测角度。
坐标正反算计算公式

坐标正反算计算公式引言在数学和计算机科学领域中,坐标转换是一种常见的操作。
坐标正反算是指从一个坐标系中的点转换到另一个坐标系中的点,并且可以从目标坐标系中的点转换回原始坐标系中的点。
这种计算在许多应用中都非常有用,例如地理信息系统、计算机图形学和机器人学。
坐标正算坐标正算是将一个坐标点从原始坐标系转换到目标坐标系的过程。
在二维平面中,我们可以使用以下公式将点(x, y)从原始坐标系转换到目标坐标系:x' = x * cos(θ) - y * sin(θ) + dxy' = x * sin(θ) + y * cos(θ) + dy其中,(x, y)是原始坐标系中的点,(x’, y’)是目标坐标系中的点,θ是旋转角度,dx和dy是平移量。
这些参数确定了坐标转换的方式。
坐标反算坐标反算是将一个坐标点从目标坐标系转换回原始坐标系的过程。
在二维平面中,我们可以使用以下公式将点(x’, y’)从目标坐标系转换回原始坐标系:x = (x' - dx) * cos(-θ) - (y' - dy) * sin(-θ)y = (x' - dx) * sin(-θ) + (y' - dy) * cos(-θ)同样地,(x’, y’)是目标坐标系中的点,(x, y)是原始坐标系中的点,θ是旋转角度,dx和dy是平移量。
应用举例坐标正反算的计算公式在各种应用中都有广泛的应用。
•地理信息系统(GIS)中,坐标转换用于将地球表面的经纬度坐标转换为平面坐标系(如投影坐标系)。
这种转换对于地图制图和空间数据分析非常重要。
•在计算机图形学中,坐标转换用于将三维物体的顶点坐标从模型空间转换到世界空间,然后转换到相机空间或屏幕空间。
通过坐标转换,我们可以实现物体的旋转、缩放和平移等操作。
•在机器人学中,坐标转换用于描述机器人的位置和姿态,以及机器人在不同坐标系中的运动。
这对于路径规划、目标追踪和运动控制非常重要。
坐标转换公式详细计算步骤

坐标转换公式详细计算步骤1. 引言嘿,朋友们,今天咱们来聊聊一个听上去有点高深、实际上却超级有趣的话题——坐标转换公式!可能有些小伙伴一听到“坐标”就觉得头大,仿佛在听外星人说话。
其实啊,这就像用不同的语言描述同一个地方,只不过这回我们要把点的位置从一个地方“搬家”到另一个地方,听上去是不是挺简单的?想象一下,你在一个城市里,想把你的小店从市中心搬到郊区。
你会用什么?对了,地图!坐标就是地图上的标记。
现在,我们要的是如何把这些标记从一个地图转换到另一个地图。
是不是挺刺激的?2. 坐标的基本概念2.1 坐标系首先,我们得搞清楚坐标系是个啥。
其实,坐标系就像是一个大舞台,每一个点都是舞台上的演员。
有的坐标系是二维的,比如我们常见的平面图,x轴和y轴就像是舞台的左右两边。
而三维坐标系则多了一条z轴,像是把舞台抬高,给演员多了一点表演的空间。
2.2 坐标的表示好了,了解了坐标系后,咱们得学会如何表示这些坐标。
想象一下,一个点在平面上被表示成(x, y),这就像是这个点的身份证号。
它告诉你这个点在舞台上的确切位置。
对于三维坐标系呢,咱们就加上一个z,比如(x, y, z),这就像是在舞台上多了一个层次感,让表演更丰富。
3. 坐标转换的必要性3.1 为什么要转换你可能会问,为什么我们需要坐标转换呢?哈哈,这就好比你去一个新城市玩,没地图可不行!在不同的坐标系中,我们可能会遇到一些需要转换的情况,比如, GPS 导航中就经常涉及到这个问题。
简单来说,转换可以帮助我们在不同的场合使用不同的坐标系,不管是搞科研,还是逛商场,都是必须的。
3.2 常见的转换公式接下来,咱们进入正题——坐标转换公式。
最常用的两种转换就是从极坐标转到直角坐标,反之亦然。
极坐标呢,就是用角度和距离来描述点的位置,直角坐标则用横纵坐标来描述。
公式如下:从极坐标(r, θ)转换到直角坐标(x, y):。
x = r * cos(θ)y = r * sin(θ)反之,从直角坐标转换到极坐标:r = √(x² + y²)θ = arctan(y/x)哎呀,听上去有点复杂,不过没关系,慢慢来,大家肯定能学会!4. 计算步骤详解4.1 实际示例假设你有一个点的极坐标是(5, 30°),你想把它转换成直角坐标。
角度转换与坐标正反算

一、角度转换在工程实际中我们是用角度(60进制)来记录观测数据,但是在计算中计算机(计算器)所能接受的往往是百分制的弧度,因此就有必要将度分秒表示的观测值转换为百分制的弧度以计算机所能接受的方式进行计算。
1、度分秒转换弧度计算计算的关键是要将度分秒分离出来,在这里要用到V B的In t函数。
1)函数的定义形式如下:语法:Int(number) 必要的number参数是Double或任何有效的数值表达式。
如果number 包含Null,则返回Null。
说明:Int删除number的小数部份而返回剩下的整数。
如果number为负数,则Int 返回小于或等于number的第一个负整数,例如,Int 将-8.4 转换成-9。
示例:Dim dfmdfm = Int(124.3425) ' 返回124。
返回参数的整数部分。
2)程序实现步骤①新建“教学程序”工程图1:新建工程新建窗体的属性设置如下:名称:FrmJDCaptio n:角度转换在窗体Frm JD上放置三个标签L abel1、Label2、Label3,三个文本框T e xt1、Text2、T ext3,两个命令按钮Command1、Comman d2,各控件对象的属性设置如下表所示。
2.1 控件对象属性设置2.2 角度转换程序设计界面代码如下:Option Explic it '强制变量定义ConstPI = 3.1415926535'定义常量Privat e Sub Comman d1_Cl ick()Dim m_dfmAs Double '输入的数值,6进制度分秒Dim m_d As Double'定义变量度Dim m_f As Double'定义变量分Dim m_xsdAs Double '小数度m_dfm= Val(Text1.Text) '将字符串常量转换为数字常量m_d = Int(m_dfm)'利用int()函数将度取出m_dfm= (m_dfm- m_d) * 100m_f = Int(m_dfm)'取出分m_dfm= m_dfm* 100 '得到秒m_xsd= m_d + m_f / 60 + m_dfm/ 3600 '转换为小数度Text2.Text = Str(m_xsd)'输出小数度Text3.Text = Str(m_xsd* PI / 180) '输出弧度值End SubPrivat e Sub Comman d2_Cl ick()Unload MeEnd Sub2、弧度转换度分秒计算在“教学程序”工程中新建一窗体,窗体属性设置如下:名称:FrmhdCaptio n:转换弧度在窗体Frm hd上放置两个标签L abel1、Label2,两个文本框T e xt1、Text2,两个命令按钮Command1、Comman d2,各控件对象的属性设置如下表所示。
坐标正算与反算
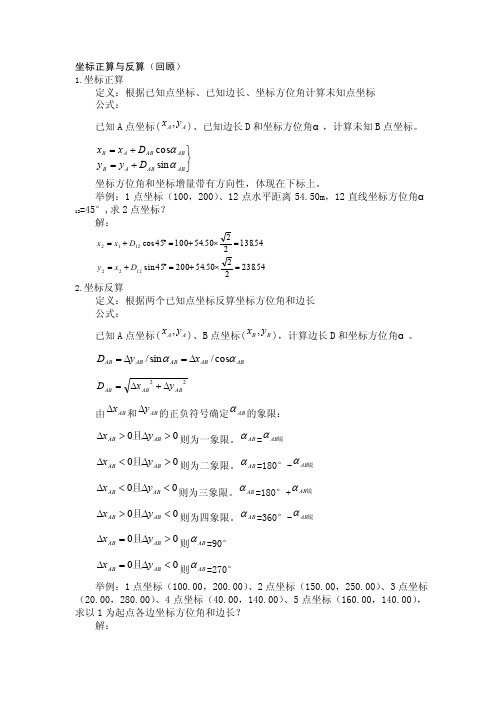
坐标正算与反算(回顾)1.坐标正算定义:根据已知点坐标、已知边长、坐标方位角计算未知点坐标公式:已知A 点坐标(A A y x ,)、已知边长D 和坐标方位角α,计算未知B 点坐标。
⎭⎬⎫+=+=AB AB A B AB AB A B D y y D x x ααsin cos坐标方位角和坐标增量带有方向性,体现在下标上。
举例:1点坐标(100,200)、12点水平距离54.50m ,12直线坐标方位角α12=45°,求2点坐标?解:54.2382250.5420045sin 54.1382250.5410045cos 12221212=⨯+=︒+==⨯+=︒+=D x y D x x2.坐标反算定义:根据两个已知点坐标反算坐标方位角和边长公式:已知A 点坐标(A A y x ,)、B 点坐标(B B y x ,),计算边长D 和坐标方位角α。
AB AB AB AB AB x y D ααcos /sin /∆=∆=22AB AB AB y x D ∆+∆=由AB x ∆和AB y ∆的正负符号确定AB α的象限:00>∆>∆AB AB y x 且则为一象限。
AB α=锐AB α00>∆<∆AB AB y x 且则为二象限。
AB α=180°-锐AB α00<∆<∆AB AB y x 且则为三象限。
AB α=180°+锐AB α00<∆>∆AB AB y x 且则为四象限。
AB α=360°-锐AB α00>∆=∆AB AB y x 且则AB α=90°00<∆=∆AB AB y x 且则AB α=270°举例:1点坐标(100.00,200.00)、2点坐标(150.00,250.00)、3点坐标(20.00,280.00)、4点坐标(40.00,140.00)、5点坐标(160.00,140.00),求以1为起点各边坐标方位角和边长?解:,Ⅳ,Ⅲ,Ⅱ)(,Ⅰ︒-==--=∆∆==-+-=︒==--=∆∆==-+-=︒-=-=--=∆∆==-+-=︒==--=∆∆==-+-=451arctan 00.10000.17000.20000.130arctan99.98)00.20000.130()00.10000.170(451arctan 00.10000.4000.20000.140arctan 85.84)00.20000.140()00.10000.40(451arctan 00.10000.2000.20000.280arctan 14.113)00.20000.280()00.10000.20(451arctan 00.10000.15000.20000.250arctan 71.70)00.20000.250()00.10000.150(2212221222122212AB AB AB AB AB AB AB AB AB AB AB AB x y m D x y mD x y m D x y m D αααα。
计算坐标与坐标方位角的基本公式
二 计算坐标与坐标方位角的基本公式控制测量的主要目的是通过测量和计算求出控制点的坐标,控制点的坐标是根据边长及方位角计算出来的。
下面介绍计算坐标与坐标方位角的基本公式,这些公式是矿山测量工中最基本最常用的公式。
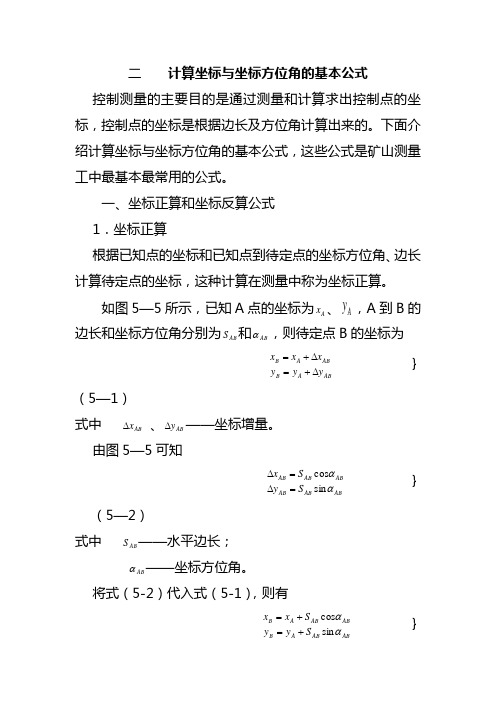
一、坐标正算和坐标反算公式1.坐标正算根据已知点的坐标和已知点到待定点的坐标方位角、边长计算待定点的坐标,这种计算在测量中称为坐标正算。
如图5—5所示,已知A 点的坐标为Ax 、A y ,A 到B 的边长和坐标方位角分别为AB S 和ABα,则待定点B 的坐标为 AB A B ABA B y y y x x x ∆+=∆+= }(5—1)式中 AB x ∆ 、ABy ∆——坐标增量。
由图5—5可知AB AB AB AB AB AB S y S x ααsin cos =∆=∆ } (5—2)式中 AB S ——水平边长;AB α——坐标方位角。
将式(5-2)代入式(5-1),则有AB AB A B AB AB A B S y y Sx x ααsin cos +=+= }(5—3)当A 点的坐标A x 、A y 和边长AB S 及其坐标方位角ABα为已知时,就可以用上述公式计算出待定点B 的坐标。
式(5—2)是计算坐标增量的基本公式,式(5—3)是计算坐标的基本公式,称为坐标正算公式。
从图5—5可以看出AB x ∆是边长ABS 在x 轴上的投影长度,AB y ∆是边长ABS 在y 轴上的投影长度,边长是有向线段,是在实地由A 量到B 得到的正值。
而公式中的坐标方位角可以从0°到360°变化,根据三角函数定义,坐标方位角的正弦值和余弦值就有正负两种情况,其正负符号取决于坐标方位角所在的象限,如图5—6所示。
从式(5—2)知,由于三角函数值的正负决定了坐标增量的正负,其符号归纳成表5—3。
图5—5 坐标计算图5—6 坐标增量符号表5—3 坐标增量符号表例 1 已知A 点坐标A x =100.00m ,Ay =300.10m ;边长AB s =100m ,方位角AB α=330°。
坐标正算反算公式讲解

坐标正算反算公式讲解(总12页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除一 方位角:在高斯直角坐标系中,由坐标纵轴方向的北端起,顺时针量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用a 表示。
1、第一象限的方位角YX第一象限第二象限第三象限第四象限oAa图12、第二象限的方位角Y X第一象限第二象限第三象限第四象限oAa图23、第三象限的方位角YX第一象限第二象限第三象限第四象限o Aa图34、第四象限的方位角YX第一象限第二象限第三象限第四象限oAa图4方位角计算公式:x=a -1tanA Y O Y -AX OX-方位角的计算器计算程序:Pol(X A -X O ,Y A -Y O )直线OA 方位角度值赋予给计算器的字母J ,0≤J <360。
直线段OA 的距离值赋予给计算器的字母I,I >0 直线OA 与直线AO 的方位角关系:1、 当直线OA 的方位角≤180°时,其反方位角等于a+180°。
2、当直线OA 的方位角>180°时,其反方位角等于a-180°。
二 方位角的推算 (一)几个基本公式 1、坐标方位角的推算或:注意:若计算出的方位角>360°,则减去360°;若为负值,则加上360°。
例题:方位角的推算已知:α12=30°,各观测角β如图,求各边坐标方位角α23、α34、α45、α51。
13图5解:α23= α12-β2+180°=30°-130°+180°=80°α34= α23-β3+180°=80°-65°+180°=195°α45=α34-β4+180°=195°-128°+180°=247°α51=α45-β5+180°=247°-122°+180°=305°α12=α51-β1+180°=305°-95°+180°=30°(检查)三坐标正算一、直线段的坐标计算oB DACEaap图6设起点O的坐标(X O,Y O),直线OP的方位角为F op,求A、C、E 点的坐标1、设直线段OA长度为L,则A点坐标为X A=X O+L×Cos(F op)Y A=Y O+L×Sin(F op)2、设直线段OB长度为L OB,直线段BC长度为L BC,则C点坐标为X B=X O+L OB×Cos(F op)Y B=Y O+L OB×Sin(F op)直线BC的方位角F BC=F op+aIF F B C>360°:Then F BC-360°→F BC:IfEndX C=X B+L BC×Cos(F BC)Y C=Y B+L BC×Sin(F BC)3、设直线段OD长度为L OD,直线段DE长度为L DE,则E点坐标为X D=X O+L OD×Cos(F op)Y D=Y O+L OD×Sin(F op)直线DE的方位角F DE=F op-aIF F DE<0°:Then F DE+360°→F DE:IfEndX E=X D+L DE×Cos(F DE)Y E=Y D+L DE×Sin(F DE)二、缓和曲线段的坐标计算x Y 00=L- +=L 40R L 52s 2L3456R L 94s 4L6R L 3sL 336R L 7s 33-90 L πRL sO2切线角=设完整缓和曲线起点O 的坐标为O (XO,YO ),方位角为F ,曲线长度为L S ,曲线上任一点的曲线长度为L, 当线路右转时直线CP 的方位角Fcp=F+90°IF F cp>360°:Then F cp-360°→F cp:IfEnd当线路左转时直线CP的方位角Fcp=F-90°IF F cp<0°:Then F cp+360°→F cp:IfEndX P=X O+Abs(x O)×Cos(F)+Abs(y O)×COS(F CP)Y P=Y O+Abs(x O)×Sin(F)+Abs(y O)×Sin(F CP)三、圆曲线段的坐标计算圆曲线的已知点数据为起点S的桩号K s、走向方位角αs、起点S 坐标为(X o,Y o)、圆曲线半径为R与曲线长为L。
坐标正算反算公式

坐标正算反算公式好的,以下是为您生成的文章:在咱们学习测量和地理相关知识的时候,坐标正算反算公式那可是相当重要的家伙!这俩公式就像是一对默契的好兄弟,能帮咱们解决好多实际问题。
先来说说坐标正算公式。
想象一下,咱们站在大地上,手里拿着测量仪器,知道了一个点的坐标,还有它到另一个点的距离和方位角。
这时候,坐标正算公式就派上用场啦!它能根据这些已知条件,算出另一个点的坐标。
就好像是我们拿着神奇的魔法棒,轻轻一挥,未知的坐标就乖乖现身了。
记得有一次,我们学校组织了一次实地测量活动。
那是一个阳光明媚的日子,我们来到了学校后面的小山坡。
老师给我们布置了任务,要测量出山坡上几个特定点的坐标。
我和小伙伴们兴奋极了,拿着仪器就开始忙活。
我负责记录数据,小伙伴小明则认真操作着仪器,测量距离和方位角。
当我们得到了一组数据后,就开始用坐标正算公式来计算另一个点的坐标。
一开始,我还有点紧张,生怕算错了。
但当我按照公式一步一步来,把数字代入,仔细计算,最后得出结果的时候,那种成就感简直爆棚!再说坐标反算公式。
它和正算公式刚好相反,是通过两个点的坐标来算出它们之间的距离和方位角。
这在规划路线、设计建筑的时候可太有用了。
就像上次我们测量完山坡上的点之后,老师又让我们根据测量得到的坐标,计算出不同点之间的距离和方位角。
这时候坐标反算公式就闪亮登场了。
我们对照着公式,认真地计算,互相检查,确保结果的准确性。
通过这次活动,我深深地体会到了坐标正算反算公式的神奇和重要性。
它们不仅仅是书本上的公式,更是能在实际生活中发挥大作用的工具。
总之,坐标正算反算公式虽然看起来有点复杂,但只要我们多练习、多实践,就能熟练掌握它们,让它们为我们的学习和生活服务。
不管是在测量大地,还是在规划未来的道路,这两个公式都会是我们可靠的好帮手!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0.0000
度 分
秒
度 分
秒
3830617.9990
474971.1480
0.0000
高差/m Hob=Ho-Hb
0.0000 83.8000 187.6000 205.4658
×
180.0000000000
90.0000000000
180 0
0.00
90
0
0.00
放样 2# 点:B
3830701.7990
-90.0000000000 负 值 取 整
左旋 90 0 0.00
60
进 制 值
仪器转动 方向(以 角 站立于测 站面向后 视点,自 身左右)
475158.7480
0.0000
高差/m Hab=Ha-Hb
0.0000
×
备 注
正
北 值 单位:m
正
东 值 单位:m
后视方向线
前视方向线
使用说明:1、蓝色单元格为用户填入,红色单元格为对应项的结果。蓝色单元格外,其余单元格不要随意改动!2、直接输入站名(不影响计算)、X、Y、H[蓝 、Y、H值后表格会自动计算出高差、方向角、夹角[红色字体]。4、单元格中显示“≠≠≠≠≠”(表示单元格偏小)或未显示完成是表格列宽原因,可自行调整。 互不影响,高程只与高差有关,计算角度时可不输入高程值,计算高差时亦可以不输入坐标值。6、小数保留位数为常用精度进行的取值,若不能满足可和本人联 无数次保存不会对下次打开计算产生任何影响,请放心使用(若想在下一次回到本次输入的数据可直接在关闭excel时点保存)。8、本表格为个人制作,能力有 计算错误、便捷的计算方法、不足地方,请邮件至664899419@或QQ。以供修改、学习、探讨,谢谢!(编此主要想用于建筑放线定位,定点数据计算,拷贝 否支持,左下角表格切换还有角度转换和正算表格)用于实际工程时,请认真复核后使用,本表为个人制作的对计算结果不付任何责任!
此 十 列 进 后视点到放样点距 求 制 反 离 角 正 度 切 值
60 角
进 制 值
பைடு நூலகம்
十 进 制 角 度
60 角
进 制 值
夹
角 AOB
分 秒
角
OB在OA 定向线 左右侧
度 度
[蓝色单元格]。3、输入坐标X 整。5、表格中高程和XY坐标 人联系修改。7、对excel进行 力有限,若有逻辑关系错误、 拷贝于手机打开时需看手机是
建筑坐标反算(2013.9.30)
点 号 输 入 点 名 X坐标(N) Y坐标(E) H高程/m 高差/m Hoa=Ho-Ha O-A平距/m O-B平距/m A-B平距/m 方向角OA(度) 方向角OB(度)
测站 4# 点:O 后视 5# 点:A
3830701.7990
474971.1480
0.0000