仿壁虎型机器人单片机控制系统
柔性仿生爬壁机器人控制系统研究

柔 性 仿 生 爬 壁 机 器 人 控 制 系统 研 究
于树 林 一梅 涛 , , , 李 冰 1, 少 明 ,孙 2
( 1. 中 国科 - 院 合 肥 智 能机 械 研 究所 , 肥 2 00 1; 中 国科 学技 术 大 学 g 合 3 3 2. 自动化 系 , 肥 2 00 7; 合 3 2
a d e p r n a ,t e p p r p o o e e o t l meh d a e n f x be b o i l ci i g o o , t e s se n x e me tl h a e r p s d a n w c n r t o b s d o l i l in c wal l i o e - mb n rb t h y tm
us d dit bue t cu e b s d on CU a t o e c n rle , a d m a e he r b t tbl rwla c r ng t h r cs e sr td sr t r a e M i u s he c r o to lr n d t o o sa e c a c odi o t e p e ie g i l n i g n t e e p rme tle io m e tt e r u ts we h e sbiiy a d a i t h meh d n h y ia a tp a n n .I h x e i n a nvr n n h es l ho d t e f a i lt n v ldi o t e yf to o te ph sc l
YU S u—i MEI h ln 一, Ta 3 LI n , UN S a — ng o , Bi g S h o mi
仿生壁虎项目总结书

合肥工业大学校级大学生创新训练计划项目项目总结书项目名称:机械训练-仿生壁虎项目编号:2012CXCY005所在学院:机械与汽车工程学院指导老师:李德宝项目组成员:樊高金、李文浩、魏巍、殷鹏程、范荣升项目起止时间:2012.6.4-2012.5.9目录1项目概述 (2)1.1背景描述 (2)1.2项目目标 (2)1.3项目组成员及指导老师 (2)2 项目管理过程 (2)2.1项目启动 (2)2.2项目计划 (3)2.3项目实施 (3)2.4项目收尾 (3)3项目成果 (3)3.1项目成果简介 (3)3.2技术方案 (3)4经验教训 (4)5建议 (4)6结语 (5)1.项目概述1.1背景描述:随着科技的发展,日异月新。
如今机器人逐渐代替手工进入了人们的生活。
机器人还可以代替人类从事乏味、劳累和危险的工作, 甚至完成人类不能胜任的工作。
我们成员组曾经进行过为期一个多月的工程训练即金工实习,对机械行业能用到的工种有了初步的认识和基本技能的掌握。
所以,这对我们进行课题创新设计会有很大帮助。
因此我们开始了“机械仿生壁虎”这个课题。
1.2项目目标:仿生壁虎机器人,利用它的特点形态小,可以穿梭于复杂地形等特点。
可以被人们用来从事一些人类难以到达的地方进行工作。
比如进行地震后救灾探索,复杂古墓的侦查等工作。
1.3项目组成成员及指导老师:我们首先确定各自的爱好即特长我们明确分工。
项目组成成员有魏巍、范荣升、殷鹏程、李文浩、樊高金。
其中组员分工明确,各司其职,认真对待,积极准备。
魏巍负责资料编辑,论文的材料整理。
范荣生负责工作记录本的内容。
李文浩负责二维cad图的绘制。
殷鹏程负责壁虎三维动画的制作。
我负责论文的编写和ppt的制作。
我们还在一起讨论壁虎的结构,运动机构等等内容。
我们的指导老师是李德宝老师,他负责大局的布置。
2.项目管理过程2.1项目启动:(1)4月6号组建项目团队,确定例会制度,制定了小组章程和财务管理办法,选择制作仿生壁虎;(2)在4月12号项目组列会上,根据大家的建议,大家一致同意研究仿生壁虎;(3)完成并提交项目建议书;(4)得到发起人的批准,项目正式启动。
壁虎式机器人设计说明书

壁虎式机器人设计说明书一、引言壁虎式机器人是一种仿生机器人,其设计灵感来源于壁虎这种能够在垂直墙壁和天花板上爬行的动物。
本文将详细介绍壁虎式机器人的设计原理、结构和功能。
二、设计原理壁虎式机器人的设计原理基于壁虎的爬行能力,通过模拟壁虎足底的特殊结构和工作原理,实现机器人在垂直墙壁和天花板上的自由爬行。
壁虎足底具有数百万微小的刚毛,这些刚毛能够产生分子间吸附力,从而使壁虎能够在垂直表面上保持牢固的附着力。
三、结构设计1. 壁虎式机器人采用轻质材料制作机身,以降低重量,提高机器人的可操控性和稳定性。
2. 机器人的足底采用仿生设计,使用高强度材料制作刚毛状结构,以增加机器人与墙壁之间的附着力。
3. 机器人身体上装配有多个传感器,用于感知周围环境和墙壁表面的特征,以便机器人能够准确地选择爬行路径。
4. 机器人配备了高效的电池供电系统和稳定的电子控制系统,以确保机器人在爬行过程中的稳定性和持久性。
四、功能设计1. 壁虎式机器人具有自主导航功能,能够通过内置的导航系统自动规划最佳爬行路径,并实现自动避障。
2. 机器人配备了高清摄像头和红外传感器,能够实时监测周围环境,并将数据传输至操作者的控制终端。
3. 机器人可通过无线通信与外部设备进行连接,实现远程控制和数据传输。
4. 机器人具备抓取功能,可用于搬运小型物体或执行维修任务。
5. 机器人具备自我保护功能,当机器人检测到墙壁表面出现异常情况时,能够自动停止爬行并发送警报。
五、应用领域1. 壁虎式机器人在建筑维护和清洁领域具有广阔的应用前景,能够代替人工进行高空清洁和维修工作,提高工作效率和安全性。
2. 机器人在军事领域中可以用于侦察和搜救任务,能够在城市环境和复杂地形中执行任务。
3. 机器人还可以应用于科学研究和教育领域,用于探索生物仿生学和机器人技术的交叉领域。
六、结论壁虎式机器人是一种具有仿生特点的机器人,通过模拟壁虎的爬行能力实现在垂直墙壁和天花板上的自由爬行。
壁虎动物机器人遥控系统

收稿日期:2007-11-22基金项目:国家自然基金重点项目(60535020);国家自然基金项目(30400086)作者简介:李海鹏(1982-),男,硕士研究生,研究领域为机器人控制系统和LabVIEW 程序设计;郭 策,副教授,研究方向为网络控制和生物机器人。
壁虎动物机器人遥控系统李海鹏1,戴振东1,谭 华1,郭 策1,孙久荣2(1.南京航空航天大学仿生结构与材料防护研究所,江苏南京210016;2.北京大学生命科学学院,北京100871)摘 要:介绍了一个基于ATme ga8L 和CC1000芯片的壁虎动物机器人遥控刺激系统。
该系统主要由便携式电脑、微控制器和无线数据收发器构成,可以分为控制平台和刺激器两部分。
控制命令从笔记本电脑输入,然后无线数据收发器发送出去。
刺激器接收指令并产生刺激信号,完成对壁虎机器人的运动控制。
不带便携式电脑,控制平台的总重量不到130g,便于携带。
刺激器的电路非常紧凑,采用贴片封装的元件,体积小(长31mm,宽39mm,高22mm )、质量轻(带电池13.6g )。
实验证明:该系统在300m 的较开阔地带,系统工作稳定、可靠。
关键词:壁虎动物机器人;遥控系统;微控制器;无线收发器中图分类号:TP24 文献标识码:A 文章编号:1673-629X (2008)08-0016-04ARemoteS ystemforGeckoAnimal-RobotLIHai 2peng 1,DAIZhen 2dong 1,TANHua1,GUOCe1,SUNJiu 2rong 2(1.InstituteofBio-inspiredStructureandSurfaceEngineering,Nan jingUniversit y ofAeronauticsandAstronautics,Nan jing210016,China;2.Colle geofLifeSciences,PekingUniversit y,Bei jing100871,China )Abstract:Aremotemicro-stimulates ystemfor geckoanimal-robot,whichbasedonthechipsATme ga8LandCC1000,wasdevelopedin presentstudies.Thissystemincludesaremotecontroldeviceandamicro-stimulator,whichmainlyconsistsofnotebookPC,micro-controlunit (MCU )andtransceiver.Thecontrolcommandisin puttedintonotebookPC,andthen,sentoutbyradiofre quencytransceiv 2er.Themicro-stimulator getsthesi gnal,out putsacontrolsi gnal,re gulates gecko ’sbehavior.Theremotecontroldevice’swei ghtislessthan130g.Anditiseasytocarr y.Themicro-stimulatorisverycom pact (lengthis31mm,widthis39mm,heightis22mm)anditsweightisonl y13.6gwithabatter y.Ourex perimentstestifiedthatthissystemransmoothl yin300mopenarea.Ke ywords:geckoanimal-robot;remotes ystem;micro-controlunit;transceiver0 引 言近些年,随着电生理学的不断发展,人们已经将其和行为学结合,形成了一个全新的研究领域———动物机器人,如山东科技大学的老鼠动物机器人[2]和纽约州大学的老鼠动物机器人[2]。
仿壁虎 爬壁机器人 柔性机器人 柔性脚掌 外翻 展平 单片机
仿壁虎论文:柔性仿壁虎机器人的研究【中文摘要】生物壁虎能够在光滑竖直的壁面上自如行走,在紧急情况下能够贴在天花板上快速移动。
壁虎的脚掌通过外翻和内收完成与壁面的脱离和黏附。
通过模仿壁虎的灵活运动和黏附方式,研制一种柔性仿壁虎机器人,该机器人在环境适应性方面具有更高的实用价值。
本文首先详细介绍了仿壁虎爬壁机器人的研究现状,进而阐述柔性仿壁虎机器人研究的意义和内容。
通过对壁生理特点和运动方式的大量调研,提出柔性仿壁虎机器人的总体方案设计。
在总体方案设计的基础上,设计了基于一条边长可变四边形驱动的机器人本体结构。
对该结构进行了自由度计算,通过对关节结构的改进,避免了机器人在运动过程中黏附阵列与接触面之间产生较大的切向力。
对机器人本体的驱动关节进行了受力仿真,为机器人选择了驱动器。
利用三维快速打印成型技术加工了机器人本体。
接着根据壁虎脚掌的外翻和内收特点,设计并研制了具有柔性的可采用仿壁虎微纳米粘附阵列材料的仿壁虎柔性脚掌。
对该脚掌进行了力学分析与计算。
仿壁虎柔性脚掌采用伺服舵机作为脚掌外翻和展平的驱动器。
采用单片机对伺服舵机控制,实现脚掌的外翻和展平。
制作了柔性脚掌系统并对其进行了黏附和脱离实验。
最后,为柔性仿壁虎机器人设计了对角线步态,将所建...【英文摘要】Gecko can climb freely on smooth vertical wall, and it even can quickly move on the ceiling in an emergency.Gecko can control pad’s abduction and adduction to finish detachment and adhesion. To design the compliant gecko inspired robot which is more useful in an unknown environment, we simulate gecko’s style of movement and adhesion.Firstly, the status of research on gecko robot is introduced and analyzed in detail, and then explain the research significance and content of the compliant gecko inspired ...【关键词】仿壁虎爬壁机器人柔性机器人柔性脚掌外翻展平单片机【英文关键词】gecko inspired climbing robot compliant robot compliant foot bend flat single chip microcomputer 【索购全文】联系Q1:138113721 Q2:139938848【目录】柔性仿壁虎机器人的研究摘要4-5Abstract5第1章绪论14-21 1.1 引言14 1.2 仿壁虎机器人的研究现状14-19 1.3 本文的研究意义及课题来源19 1.4 本文的主要研究内容19-21第二章柔性仿壁虎机器人总体设计21-24 2.1 机器人系统方案设计21-23 2.1.1 黏附方案的选择21-22 2.1.2 移动方案的选择22 2.1.3 机器人驱动器方案的选择22-23 2.2 本章小结23-24第3章柔性仿壁虎机器人结构设计24-38 3.1 机器人本体设计24-28 3.1.1 本体结构设计24-25 3.1.2 机器人原理分析25-28 3.2 机器人的建模及受力分析28-33 3.2.1 机器人整体建模28-29 3.2.2 机器人驱动关节受力仿真29-33 3.3 机器人驱动舵机型号的选择33 3.4 机器人本体制备33-37 3.4.1 机器人加工方法的选择34 3.4.2 机器人本体的加工34-37 3.5 本章小结37-38第4章柔性仿壁虎机器人脚掌系统设计38-51 4.1 生物壁虎脚掌原型研究38-40 4.2 仿壁虎柔性脚掌设计40-42 4.2.1 脚掌系统设计40-41 4.2.2 脚掌结构设计41-42 4.3 仿壁虎柔性脚掌的驱动42-45 4.3.1 传动机构设计42-44 4.3.2 驱动机构设计44-45 4.4 仿壁虎柔性脚掌受力分析45-47 4.4.1 脚掌外翻受力分析45-46 4.4.2 脚掌黏附过程受力分析46-47 4.4.3 伺服舵机的选择及受力分析47 4.5 仿壁虎柔性脚掌的制备47-48 4.6 柔性脚掌外翻及展平实验48-50 4.7 本章小结50-51第5章柔性仿壁虎机器人控制系统设计51-69 5.1 机器人行走的步态规划51-53 5.2 机器人步行步态的仿真53-58 5.2.1 仿真软件介绍53-54 5.2.2 机器人爬行仿真工作环境设置54-56 5.2.3 机器人爬行仿真56-58 5.3 机器人控制系统硬件设计58-61 5.4 机器人控制系统软件设计61-63 5.4.1 伺服舵机及控制的介绍61-62 5.4.2 软件设计62-63 5.5 机器人实验和分析63-68 5.5.1 爬行实验63-68 5.6 本章小结68-69第6章总结与展望69-71 6.1 本文的主要工作69 6.2 本文的主要创新点69-70 6.3 工作展望70-71参考文献71-74致谢74。
基于虚拟样机技术的仿壁虎机器人步态规划及运动仿真的开题报告
基于虚拟样机技术的仿壁虎机器人步态规划及运动仿真的开题报告一、选题背景及意义随着人类社会的发展和科技的进步,机器人技术已经成为了风头正劲的热门研究领域。
机器人的运动控制是机器人技术研究中一个非常重要的环节。
步态规划是机器人运动控制领域中的核心问题之一,不同的步态规划方法会对机器人的运动性能,如运动速度、运动稳定性和能耗等产生重要的影响。
虚拟样机技术是一种新型的机器人仿真技术,它可以帮助研究者预测机器人的动力学性能和运动稳定性,减少机器人研究中的试错成本和人工实验的工作量。
使用虚拟样机技术进行仿真可以有效地降低实验成本,并可以对机器人进行全局优化,提高机器人系统的整体性能。
壁虎机器人是一种仿生机器人,它能够在任何平面上快速移动并爬行,因此在工业生产与人道救援等领域拥有广泛的应用前景。
目前,壁虎机器人的运动控制还面临诸多挑战,如运动速度、稳定性和能耗等方面的限制。
因此,对于壁虎机器人进行步态规划和运动仿真研究具有重要意义。
二、研究内容本课题主要研究基于虚拟样机技术的仿壁虎机器人步态规划及运动仿真。
研究内容如下:1. 壁虎机器人建模:对壁虎机器人进行建模,使其在虚拟环境中能够进行完整的运动仿真实验。
2. 步态规划:设计、实现壁虎机器人的步态规划算法,并结合虚拟样机技术进行全局优化。
3. 运动仿真:利用虚拟样机技术进行壁虎机器人的运动仿真,通过仿真结果分析步态规划算法的效果。
4. 系统优化:针对壁虎机器人在运动速度、稳定性和能耗等方面存在的问题,对系统进行优化。
三、研究方法本课题主要采用以下研究方法:1. 虚拟样机技术:使用虚拟样机技术对壁虎机器人进行建模和运动仿真,避免了大量的试验成本,提高了试验效率。
2. 步态规划算法:设计、实现壁虎机器人的步态规划算法,结合虚拟样机技术进行全局优化,提高步态规划算法的效果。
3. 系统优化:针对壁虎机器人的运动速度、稳定性和能耗等问题,对系统进行优化,提高系统的整体性能。
用于gis设备内部爬行的仿壁虎机器人设计

1 壁虎机器人的设计
1.1 壁虎机器人整体的设计
图1
仿壁虎爬壁机器人控制系统硬件设计由远程控制器
控制系统的 3 块控制器
基金项目: 气体绝缘金属封闭开关内部检测壁虎机器人研发及应用 (编号:GZHKJXM20170068)
收稿日期:2019-06-14
·138·
林李波,等:用于 GIS 设备内部爬行的仿壁虎机器人设计
部空间的特点,本文提供一种仿壁虎四足爬壁机器人以及
机器人配套的控制系统,设计一款适合在气体绝缘金属封
闭开关内部空间作业的具有较高实用性的机器人。该机器
人具有体积小,结构紧凑,具有空间运动能力,四足末端
对爬行壁面的贴合良好等特点。控制系统采用 stm32 单片
机为硬件平台,移植开源的 FreeRTOS 实时控制系统,具
pipe wall.
Key words: bionicrobot;gecko;hardwaredesign;softwaredesign;gaitanalysis
0 引言
随着六氟化硫封闭式组合电器逐渐成为电力系统的主
流变电设备,变电站气体绝缘金属封闭开关内部的检修和
清洁也日渐重要,成为日常运维的重点项目。急需一种变
1.2 壁虎机器人本体机械结构的设计
(AXUC) 能够配合机载运动控制器 (RC) 实现机器人的
[3]
通过对壁虎的身体结构和运动规律的研究 ,研制了
一种带有真空吸附脚掌的四足仿壁虎机器人,其结构简图
和三维建模示意图如图 2 所示。该机器人的腿部采用完全
(MC)、机载运动控制器 (RC) 和辅助运动控制器 (AX⁃
UC) 构成,3 块控制器之间通过无线通信实现指令控制和
仿壁虎爬壁机器人的结构及其控制系统研究_方晔

粘附阵列设计 [ J] .机器人 , 2006, 28(2):191 -194. [ 3] 王 田苗 , 孟 偲 , 裴 葆青 , 等 .仿 壁 虎 机器 人 研 究 综述
[ J] .机器人 , 2007, 29(3):290 -291. [ 4] CarloM andMetinS.Geckoinspiredsurfaceclimbingro-
图 5 机器人硬件控制图
设 计 中 的 控 制 模 块 采 用 Microchip公 司 的 PIC16F877A单片机 。 由于单片机引脚上的电流很 小 , 用此电流直接给形状记忆合金丝供电不足以使
图 6 SMA控制示意图
仿壁虎爬壁机器人的控制器软件设计主要是对 形状记忆合金丝的加热时序进行合理安排 。
2.1 仿壁虎爬壁机器人的步态设计 仿壁虎爬壁机器人开始运动时 , 左侧后腿和右 侧前腿准备抬起向前运动 , 另外两只腿处于支撑状 态 。然后在背部驱动元件的作用下向前运动 。 在机 器人移动到一定位置时 , 左侧后腿和右侧前腿放下 呈支撑状态 , 左侧前腿和右侧后腿抬起准备向前运 动 , 同样在背部的驱动元件作用下向前移动 。 不断 重复上述过程 , 周而复始的使机器人向前不断移动 。 这种步态规划使得机器人的重心在整个移动过程中 都处于由各足组成的支撑平面的中心位置 , 从而确 保了运动的平衡和稳定性 [ 7] 。 2.2 仿壁虎机器人的控制系统的软硬件设计 仿壁虎机器人的运动是通过控制形状记忆合金 丝的温度来实现的 。 形状记忆合金丝相变受温度控 制 , 通过对形状记忆合 金丝加热实现 对它的控制 。 设计中对形状记忆合金丝通电 , 从而实现加热的目 的 。形状记忆合金的冷却采用常用的自然冷却 , 自 然冷却不需要任何散热设备 , 对仿壁虎机器人的小 型化有利 。
仿生壁虎爬墙机器人

仿生壁虎爬墙机器人1208104摘要:本文将从壁虎爬墙原理入手,介绍仿生壁虎爬墙机器人的运动原理和系统构成,并着重介绍爬墙机器人实现爬墙功能的关键技术,同时针对目前爬墙机器人存在的问题介绍爬墙机器人未来发展的方向。
关键词:壁虎;爬墙机器人;原理一、综述机器人是一门高度交叉的综合性学科,涉及到机械学、生物学、控制论与控制工程学、计算机科学与工程、信息科学、光学、电子工程学、传感技术、人工智能、人类学、社会学等诸多学科。
自从1959年美国制造世界上第一台工业机器人起,机器人的发展经历了示教(工业)机器人、感知(遥控)机器人、智能机器人三个阶段,仿生机器人也可以作为其中较为独特的一支。
仿生机器人以仿生学为核心的相关学科进行研究,运动仿生、感知仿生、控制仿生、能量仿生、材料仿生等诸多基础仿生技术的深入研究为仿生机器人的发展提供了一定的理论基础和技术支持。
根据仿生机器人的运动方式可以将机器人分为爬行机器人、飞行机器人、跳跃机器人以及水下机器人等,这些机器人在人类的生活、生产和军事中发挥了许多独特的作用。
因爬行机器人多在陆地上运动,方便控制,所以爬行机器人的研究最为广泛。
仿生爬行机器人根据仿生类型的不同,又可以具体分为爬壁机器人、仿蛇机器人、仿蜘蛛机器人、仿蚯蚓机器人、仿昆虫机器人等,本文介绍的仿壁虎爬行机器人即属于爬壁机器人的一种。
爬壁机器人的诞生是科学研究与实际生产的双重需要。
就科学研究而言,对爬壁机器人的研究可以有力的促进仿生机械学的发展。
对动物来说,运动是其捕食、逃逸、生殖、繁衍等行为的基础。
而对机器人来说,运动也是现代机器人实现各种功能的基础。
其中能够在光滑或粗糙的各种表面上自如运动的可控移动系统,即三维空间无障碍机器人(简称3DoF-3 dimensional-terrain obstacle free机器人即我们称作的爬壁机器人)是这类机器人的重要分支,其研究和研制水平已成为衡量一个国家科技水平的重要标志之一。
基于ADAMS的仿壁虎爬壁机器人的运动仿真

摘要 : 为实现在不同环境 的壁面上 自由爬 行, 设计 了应用仿壁虎微纳米粘附阵列的爬壁机器人 , 建立了机器人 的动力学模型
及足部 与壁面之间的接触模型 , 并利用机械系统动力学软件 A A D MS的仿真功能 , 对机器人沿垂直壁 面爬行的运动特性进行
( .Ist eo tl et ahns C i s cdm f c ne , fi Il 30 ,hn ; 1 ntu fne i n M cie , hn eA ae yo Si cs He lu 2 03 C i i t I lg e e eA li 1 a
2 n esyo c neadTc nl yo h a H fi nu 3 0 6 C ia .U i rt f i c n eh o g f i , e h i 0 2 ,hn ) v i Se o C n eA 2
维普资讯
第2卷 第9 4 期
文章编号 :06— 3 8 2 0 )9— 13— 4 10 9 4 (0 7 0 0 3 0
计
算
机
仿
真
27 月 0 年9 0
基于 A A D MS的仿 壁 虎爬 壁机 器 人 的运 动仿 真
孙 丽红 , 汪小华 梅 涛 吕晓庆 , , ’
KEYW ORDS: e k n p r d; al l big r b t S mu a o ; d e in a ry G c o is i e W l —c i n o o ; i lt n A h so ra m i
了仿 真。利用 A A S的后处理模块 的分析功能 , DM 重点研究 了在一个运动周期 内 , 模型整体质心 的位移 、 电机 转矩 以及足部 与壁 面之间的接触力 随时间的变化情况。仿 真结果表明该仿壁 虎爬壁机器人 能够 以约 2 m / 的速 度沿着垂直 的壁面平 6m s 稳地运动 , 不存在波动和偏离。这 为下一步研制仿壁虎爬壁机器人 的物理样 机提供 了理论指导 , 也为其他仿 生机器人 的研 究提供了参考。 关键词 : 仿壁虎; 爬壁机器人 ; 真 ; 仿 粘附阵列
基于Atmega128L的类壁虎机器人运动控制系统的实现

ii
基于 Atmega128L 的类壁虎机器人运动控制系统的实现
图清单
图 1.1 微型爬壁机器人的三维结构简图 ...................................................................2 图 1.2 基于 LPC2104 控制系统原理框图 ..................................................................2 图 1.3 爬壁平台整体结构图 .......................................................................................3 图 1.4 吸盘的结构剖面 ...............................................................................................3 图 1.5 机器人的机械结构图 .......................................................................................4 图 1.6 机器人的脚部结构图 .......................................................................................4 图 1.7 Stickbot 机器人 ..................................................................................................5 图 1.8 Stickbot 控制系统应用程序界面图 ..................................................................5 图 1.9 Stickbot 控制系统硬件图 ..................................................................................6 图 2.1 类壁虎机器人的结构原理图 ...........................................................................9 图 2.2 类壁虎机器人的尺寸参数 ...............................................................................9 图 2.3 类壁虎机器人的结构模型 .............................................................................10 图 2.4 机器人的机器手臂 .........................................................................................11 图 2.5 机器人的连杆坐标系 .....................................................................................11 图 3.1 控制系统发射端的结构图 .............................................................................14 图 3.2 控制系统接收端的结构图 .............................................................................14 图 3.3 控制系统的原理图 .........................................................................................15 图 3.4 初期设计的控制系统实物图 .........................................................................15 图 3.5 控制系统的实物图 .........................................................................................16 图 3.6 Atmega128 的引脚配置 ...................................................................................19 图 3.7 单片机系统及舵机的电源电路图 .................................................................20 图 3.8 无线模块的电源电路图 .................................................................................21 图 3.9 复位电路 .........................................................................................................21 图 3.10 外部复位时序图 ...........................................................................................22 图 3.11 串行通讯信电路 ...........................................................................................22 图 3.12 JTAG 接口电路 ..............................................................................................23 图 3.13 ISP 接口电路 .................................................................................................23 图 3.14 单片机系统和无线模块的接口电路 ...........................................................24 图 3.15 无线模块实物图 ...........................................................................................24 图 3.16 无线模块的封装示意图 ...............................................................................25 图 4.1 舵机实物图 .....................................................................................................29
仿生机器人智能控制系统设计及应用

仿生机器人智能控制系统设计及应用近年来,仿生机器人技术已经在世界范围内获得了广泛的应用,各个领域都在积极尝试使用仿生机器人技术来替代传统的工程机器人。
仿生机器人以其自然、灵活、可信赖的结构和工作性能而备受关注。
在仿生机器人控制系统中,主要有硬件控制、软件控制和综合控制三大部分。
硬件控制部分主要包括变换器、滤波器和各种类型的传感器。
变换器的作用是将输入的电信号转换为机器人所需的电动信号,同时它也可以实现模拟/数字信号之间的转换。
滤波器可以从输入信号中消除噪声,使机器人运行较为稳定。
传感器的作用是探测外界环境的物理变化,并将它们转换为机器人可以识别的信号,因为它可以掌握周围环境的变化,从而使机器人能够很好地应对周围的变化。
软件控制部分是仿生机器人控制系统的核心部分,主要由仿生控制程序、软件工具和图形用户界面构成。
仿生控制程序提供了基于仿生法的模型,即仿生机器人可以模仿生物的运动,从而实现更精细的控制。
软件工具主要包括系统硬件模拟工具、程序模拟工具和性能分析工具,用于模拟仿生机器人的运动,而性能分析工具用于检测仿生机器人在运行过程中的误差。
爬墙机器人原理
爬墙机器人原理
爬墙机器人的原理基本上是模仿壁虎的爬墙能力。
壁虎是一种能够在垂直平滑表面上行走的爬行动物,它们通过脚部的微小毛发和分子力实现了“吸附”的效果。
爬墙机器人则是通过模仿这种原理来实现类似的功能。
爬墙机器人通常由以下几个部分组成:
1. 结构和材料:爬墙机器人一般采用轻量且具有足够强度的材料来构建主体结构。
类似壁虎脚部的吸盘结构通常使用弹性材料,例如硅胶,以提供足够的“吸附力”。
2. 接触力传感器:为了模拟壁虎爬墙时的“吸附力”,爬墙机器人通常配备了接触力传感器。
这些传感器能够感知机器人脚部与墙面之间的接触情况,以便机器人能够调整吸附力并保持稳定的附着。
3. 运动控制系统:爬墙机器人需要一个精确的运动控制系统来实现在垂直表面上的行走。
这个系统通常由多个电机和传动机构组成,以提供适当的力和运动。
4. 算法和控制器:爬墙机器人的控制器使用算法来计算和控制各个部分的运动和吸附力。
这些算法通常基于壁虎的行为研究和运动特征,以实现相似的爬墙能力。
通过将这些部分组合在一起,爬墙机器人可以模仿壁虎的爬墙能力,实现在垂直表面上的行走。
这种机器人具有潜在的应用
价值,例如在建筑施工、救援任务或工业领域中进行高空作业或其他需要垂直行走的任务。
【CN209388162U】油罐侦测壁虎型吸附作业机器人的控制系统【专利】

(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920355453.4(22)申请日 2019.03.20(73)专利权人 广东石油化工学院地址 525000 广东省茂名市官渡二路139号(72)发明人 雷高伟 张清华 刘美 王世华 张楚其 黄俊韩 (74)专利代理机构 南京纵横知识产权代理有限公司 32224代理人 董建林(51)Int.Cl.G05B 19/042(2006.01)G01D 21/02(2006.01)G01N 29/04(2006.01)G01N 29/22(2006.01)(54)实用新型名称油罐侦测壁虎型吸附作业机器人的控制系统(57)摘要本实用新型公开一种油罐侦测壁虎型吸附作业机器人的控制系统,包括安装在机体上的单片机控制板和安装在机体上的机体运动系统、机体吸附系统,机体运动系统包括推杆电机、大扭矩舵机、直流减速电机、电机驱动及24V直流电源,机体吸附系统包括电永磁吸盘及电磁铁;单片机控制板上安装有单片机,单片机分别电性连接有5V自动稳压模块、电机驱动、无线通讯模块、图传系统、LED探照灯组;无线通讯模块与PC终端连接;图传系统与PC终端连接;单片机的输入端电性连接有多个传感器。
本实用新型的系统整体功耗低、运动灵活、控制容易、负载能力较强、可稳定连续运行,可代替人类进行探测信息采集等吸附作业,可监测油罐环境数据,并无线通讯传PC终端显示。
权利要求书1页 说明书4页 附图3页CN 209388162 U 2019.09.13C N 209388162U权 利 要 求 书1/1页CN 209388162 U1.油罐侦测壁虎型吸附作业机器人的控制系统,包括安装在机体上的单片机控制板和安装在机体上的机体运动系统、机体吸附系统,其特征在于,所述单片机控制板与所述机体运动系统连接,所述机体运动系统与机体吸附系统连接,所述机体运动系统包括推杆电机、大扭矩舵机、直流减速电机、电机驱动及24V直流电源,所述机体吸附系统包括电永磁吸盘及电磁铁;所述单片机控制板上安装有单片机,所述单片机分别电性连接有5V自动稳压模块、电机驱动、无线通讯模块、图传系统、LED探照灯组;所述无线通讯模块与PC终端连接;所述图传系统与PC终端连接;所述单片机的输入端电性连接有多个传感器。
基于LPC2103的仿壁虎机器人控制系统设计
基于LPC2103的仿壁虎机器人控制系统设计俞志伟;杨屹巍;宫俊;戴振东【摘要】仿壁虎机器人要实现空间三维表面运动能力,对控制系统的智能微小化具有更高要求.本文基于大壁虎的结构和运动特点,设计了一种仿壁虎机器人,其硬件采用以LPC2103为核心的机器人控制系统,利用该芯片的4个定时器,产生12路PWM波控制机器人各关节运动,同时与设计的无线通信模块组成完整的仿壁虎机器人运动控制系统.实验结果表明,仿壁虎机器人的12自由度关节运动控制平稳,能够实现稳定爬壁运动.该仿壁虎机器人控制系统在实时计算能力、存储容量、外设扩展性以及小型化上都有着较好优势.【期刊名称】《制造业自动化》【年(卷),期】2011(033)022【总页数】5页(P5-9)【关键词】仿壁虎机器人;控制系统;LPC2103【作者】俞志伟;杨屹巍;宫俊;戴振东【作者单位】南京航空航天大学仿生结构与材料防护研究所,南京210016;南京航空航天大学仿生结构与材料防护研究所,南京210016;南京航空航天大学自动化学院.南京210016;南京航空航天大学仿生结构与材料防护研究所,南京210016;南京航空航天大学自动化学院.南京210016;南京航空航天大学仿生结构与材料防护研究所,南京210016【正文语种】中文【中图分类】TP2420 引言现代机器人技术的研究是控制论、系统论、信息学、计算机科学、机械学、传感器技术、人工智能和仿生学等多学科综合而形成的高科技产物,是研究最为活跃及应用愈加广泛的领域[1]。
传统机器人都采用轮式或履带式结构,不能充分实现空间三维表面运动的灵活性,因此人们把目光转向了自然界,希望能从中获得灵感[2, 3]。
由于壁虎是空间三维表面运动灵活的良好仿生对象,对非结构环境适应能力强,能够实现地面、墙面、天花板及不同法向面间的过渡,因此通过对壁虎的运动功能仿生研究,研制具有足式结构的仿壁虎机器人具有比轮式和履带式等机构更好的优越性。
壁虎动物机器人遥控系统
壁虎动物机器人遥控系统李海鹏;戴振东;谭华;郭策;孙久荣【期刊名称】《计算机技术与发展》【年(卷),期】2008(018)008【摘要】介绍了一个基于ATmega8L和OC1000芯片的壁虎动物机器人遥控刺激系统.该系统主要由便携式电脑、微控制器和无线数据收发器构成,可以分为控制平台和刺激器两部分.控制命令从笔记本电脑输入,然后无线数据收发器发送出去.刺激器接收指令并产生刺激信号,完成对壁虎机器人的运动控制.不带便携式电脑,控制平台的总重量不到130g,便于携带.刺激器的电路非常紧凑,采用贴片封装的元件,体积小(长31mm,宽39mm,高22mm)、质量轻(带电池13.6g).实验证明:该系统在300m的较开阔地带,系统工作稳定、可靠.【总页数】4页(P16-19)【作者】李海鹏;戴振东;谭华;郭策;孙久荣【作者单位】南京航空航天大学,仿生结构与材料防护研究所,江苏,南京,210016;南京航空航天大学,仿生结构与材料防护研究所,江苏,南京,210016;南京航空航天大学,仿生结构与材料防护研究所,江苏,南京,210016;南京航空航天大学,仿生结构与材料防护研究所,江苏,南京,210016;北京大学,生命科学学院,北京,100871【正文语种】中文【中图分类】TP24【相关文献】1.基于新型多通道脑神经刺激遥控系统的动物机器人研究 [J], 杨俊卿;苏学成;槐瑞托;刘小峰2.适应不同重力环境的仿壁虎机器人运动仿真 [J], 刘琦; 戴振东; 王炳诚3.仿壁虎机器人足端三维力感知模块研制 [J], 谷雨;卞庆耀;王炳诚;王刘伟;戴振东;宋逸;段晋军4.用于GIS内部检测的仿壁虎机器人通信系统研制 [J], 吴国沛;李华;林李波;张铁5.壁虎为何跳得稳,机器人却不行 [J],因版权原因,仅展示原文概要,查看原文内容请购买。
仿生壁虎爬墙机器人
仿生壁虎爬墙机器人1208104摘要:本文将从壁虎爬墙原理入手,介绍仿生壁虎爬墙机器人的运动原理和系统构成,并着重介绍爬墙机器人实现爬墙功能的关键技术,同时针对目前爬墙机器人存在的问题介绍爬墙机器人未来发展的方向。
关键词:壁虎;爬墙机器人;原理一、综述机器人是一门高度交叉的综合性学科,涉及到机械学、生物学、控制论与控制工程学、计算机科学与工程、信息科学、光学、电子工程学、传感技术、人工智能、人类学、社会学等诸多学科。
自从1959年美国制造世界上第一台工业机器人起,机器人的发展经历了示教(工业)机器人、感知(遥控)机器人、智能机器人三个阶段,仿生机器人也可以作为其中较为独特的一支。
仿生机器人以仿生学为核心的相关学科进行研究,运动仿生、感知仿生、控制仿生、能量仿生、材料仿生等诸多基础仿生技术的深入研究为仿生机器人的发展提供了一定的理论基础和技术支持。
根据仿生机器人的运动方式可以将机器人分为爬行机器人、飞行机器人、跳跃机器人以及水下机器人等,这些机器人在人类的生活、生产和军事中发挥了许多独特的作用。
因爬行机器人多在陆地上运动,方便控制,所以爬行机器人的研究最为广泛。
仿生爬行机器人根据仿生类型的不同,又可以具体分为爬壁机器人、仿蛇机器人、仿蜘蛛机器人、仿蚯蚓机器人、仿昆虫机器人等,本文介绍的仿壁虎爬行机器人即属于爬壁机器人的一种。
爬壁机器人的诞生是科学研究与实际生产的双重需要。
就科学研究而言,对爬壁机器人的研究可以有力的促进仿生机械学的发展。
对动物来说,运动是其捕食、逃逸、生殖、繁衍等行为的基础。
而对机器人来说,运动也是现代机器人实现各种功能的基础。
其中能够在光滑或粗糙的各种表面上自如运动的可控移动系统,即三维空间无障碍机器人(简称3DoF-3 dimensional-terrain obstacle free机器人即我们称作的爬壁机器人)是这类机器人的重要分支,其研究和研制水平已成为衡量一个国家科技水平的重要标志之一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
酵:瞬晦障P12睇P13晖PI#
图4
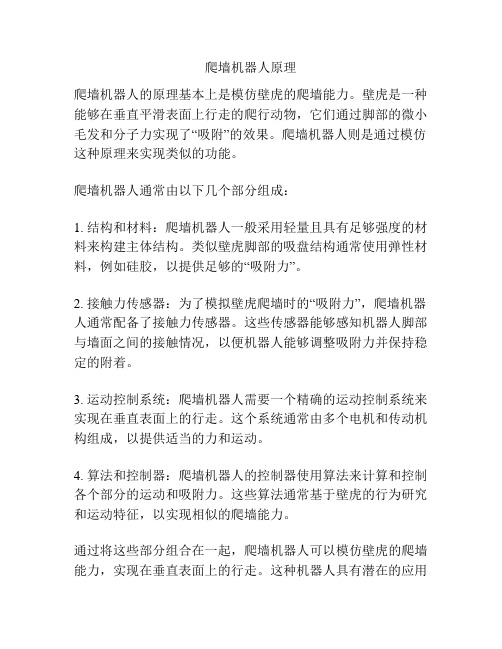
PWM控制舵机
3软件系统设计
爬行机器人在移动过程中其每条腿郜将分别处于支撑相和摆动相两种状态,所谓支撑相是指在壁
万方数据
安徽水利水电职业技术学院学报 面并推动机器人身体移动的阶段,摆动相是
指腿抬起后离开壁面的阶段。
第12卷
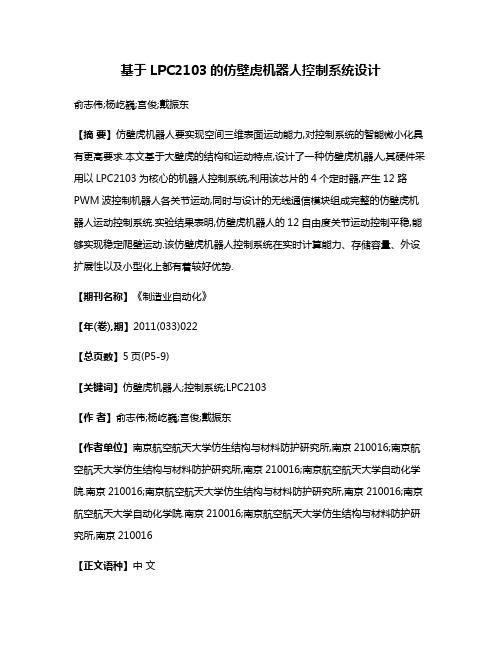
机器人的运动控制较复杂,其中最简单1 的控制即控制机器人的直行,机器人对角线
直线位移如图5所示。 机器人直线位移爬行的步骤如下:①开
高玲 小小
Lf
・宣捧■ o量空曩
始运动时1号腿和3号腿吸附在墙面,2号. 和4号腿抬起。②除抬腿关节之外的其它关 节通过转动使悬空腿往前伸的同时回收支撑 腿,从而带动身体向前移动s]/2。③放下抬
抬起的1好和3号腿放下。
图5对角线步态直线前进示意图
万方数据
第2期
张春来:仿壁虎型机器人单片机控制系统
67
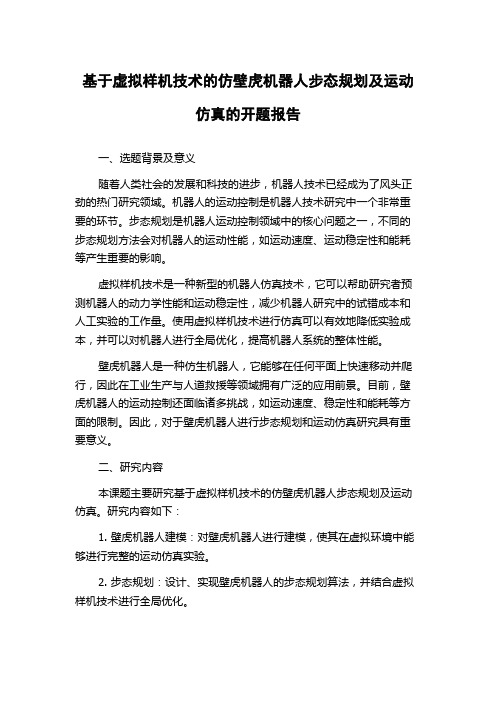
本体更好的融合。本文的仿壁虎型机器人选择了Futaba¥3107舵机作为驱动电动机,采用了电磁铁作 为吸附装置代替仿壁虎脚掌材料。仿壁虎型机器人实物如图1所示,该系统的整体框架如图2所示。 该系统允许操作者在上位机上输入控制参数,如机器人的 速度、爬行方向、各关节的静态转角等,上位机控制程序将把操 作者的输入内容转译为下位机能够理解并执行的控制指令,将 指令打包并通过串口方式向下位机发送。下位机(机器人控制 器)接收到控制指令后对指令作校验并解包数据分析指令,根 据指令结合机器人步态规划结果,通过程序代码模拟出I/0口 的PWM波形,控制舵机转动带动机器人机械本体部分,以达
第12卷第2期
2012年6月JOURNAL
安徽水利水电职业技术学院学报
OF ANHUI TECHNICAL COLLEGE OF WATER RESOURCES
AND
V01.12 No.2 Jun.2012
HYDROELECTRIC POWER
仿壁虎型机器人单片机控制系统
张春来
(安徽水利水电职业技术学院,安徽合肥230009) 摘要:文章介绍了仿壁虎型机器人的控制系统,它利用单片机通过程序代码模拟出I/O I:1的PWM波形,控 制舵机转动带动机器人移动。通过一个数字开关电路控制电磁铁电流的通断以达到控制电磁铁吸盘的吸附 和脱附功能。 关t词:仿壁虎型机器人;单片机;PWM模块;舵机 DOI:10.3969/j.issn.1671--6221.2012.02.023 中田分类号:TP242 文献标识码:A 文章编号:1671—622112012)02-0066-03
1总体硬件设计
控制技术和控制电路集成技术是仿壁虎型机器人技术中的重要组成部分,III 1仿壁虎型机嚣人实物 仿壁虎型机器人的关节众多,控制电路复杂,要使其具备与真实壁虎类似的功 能,其控制电路就更加复杂,因此优化控制结构,减小控制电路的体积和功耗有利于控制系统与机器人
收藕日期:2011—12—20;修回日期:2012--01--09 作者简介:张春来(1974一),男,安徽芜湖人,硕士,讲师,从事微机控制的教学与研究。
上吸盘的吸附和脱附效果。 2.1单片机部分
本文单片机采用AT89S52型号,单片机的12个I/O口作为PWM输出控制舵机的转角,4个I/O 口输出的SUCKn信号作为作为脚掌吸附力控制端口,Uo口利用高低电压控制功率三极管的通断达 到控制脚掌吸附力的功能,RXD、TXD分别为串口接收数据和发送数据引脚。
Eli盂宪超,王祖温,包钢,等.一种多吸盘爬肇机器人原型的研制[J].2003,(8):30一33. I-2]宦洪才,张茂青,施文娟,等.爬墙机器人控制系统漫计与调试EJ].电子工程师,2006,(7):69—76 [3]孙丽红.仿壁虎爬擘机器人研制[D].中国科学技术大学学位论文,2007. [4]刘淑霞,王炎,徐殿国.爬壁机器人技术的应用[J].机器人.1999.(2):148--155. [5]孙锦山.杨庆华。阮健.气动多吸盘爬壁机器人[J].液压与气动,2005,(8):56—58.
2.2电磁吸盘控制模块
机器人控制电磁吸盘的数字开关控制电路如图3所示,该部分由功率三极管D1758和位于基级的
上拉电阻R组成,功率三极管D1758的集电极接吸盘电 磁铁,基极的电阻R=1500Q。
2.3
PWM电动机控制模块
机器人使用了12路Futaba¥3107舵机,4个腿上各
有3个舵机控制自由度。使用单片机端口直接产出 PWM波形实现舵机转到控制,PWM舵机控制模块如图 4所示。
Abstract:The gecko robot control system are mainly introduced in this paper.Gecko robot control mo—
tor
driving the robot move.by using single chip computer code simulating the the PWM of I/0.A—
”出坍坍扭妊t…w 嚣山———卜帅㈣ :一陛陛陛陛卜t抬… 嚣俨———卜t…期
I-I挑U盯n N'M I_Iu
13
23
2
嚣叶~~~卜t_聃鼬 .-出生当扭妊t抬觚n 嚣山———卜憎蝴,
图6机器人各关节定义图
4结
论
本文中的仿壁虎型机器人通过控制关节电动机能够实现仿壁虎型机器人的行走控制,直走、转弯、 静止和吸附等状态,实验实现了机器人的单步行走,为研制小型化的仿壁虎型机器人奠定了基础。 [参考文献]
通断以达到控制电磁铁吸盘的吸附和脱附功能。
图2仿壁虎机器人控制系统框图
到控制机器人移动的目的。机器人下位机控制系统主要通过一个数字开关电路控制通过电磁铁电流的
2原理图设计
机器人控制器的电路部分包括单片机、数字开关控制电路、舵机、位于脚掌上的电磁吸盘和电源。
单片机的4路Uo作为脚掌吸附力控制端口。该输出控制数字开关电路的通断以达到控制机器人脚掌
本文链接:/Periodical_ahslsdzyjsxyxb201202024.aspx
(责任编辑陈化钢)
万方数据
仿壁虎型机器人单片机控制系统
作者: 作者单位: 刊名: 英文刊名: 年,卷(期): 张春来, ZHANG Chun-lai 安徽水利水电职业技术学院,安徽合肥,230009 安徽水利水电职业技术学院学报 Journal of Anhui Technical College of Water Resources and Hydroelectric Power 2012,12(2)
The single-chip microcomputer control system of gecko robot
ZHANG Chun-lai
(School of Mechanical and Automobile Engineering,Hefei University of Technology,Hefei 230009,China)
起的腿2、4,使得机器人处于4足着地的稳定状态。④抬起1号和3号腿。⑤再往前移动SI/2。⑥将 到此机器人的一个运动周期完成,如此往复运动实现机器人连续前进移动。以上描述了机器人在 Y方向的直线位移,由于4足机器人在X和Y方向的结构完全一样,因此可以仿照Y方向步态实现X 方向的直线位移,取机器人X方向的直线位移的步长为S2。机器人各关节定义如图6所示,仿壁虎型 机器人采用对角线步态时其各关节驱动元件的运动时序可以如图7所示。
microcomputer;PWM module;motor
0引
言
文中使用舵机作为机器人关节转动电动机,通过控制关节电动机能够实现 仿壁虎型机器人的行走控制,直走、转弯、静止和吸附等状态。该机器人配备了 无线数据模块,可以实现无线远程控制,在计算机上配备类似于无线模块即可实 现计算机软件程序控制机器人运行。
chieving the function of
circuit of electric
electromagnet chuck current electromagnet.
adsorption and take off through
a
digital switch control
Key words:gecko robot;The single-chip