小型涵道飞机设计报告
涵道尾撑式短距起降飞行器

航空航天◎
通过调研文献,我们选择 NACA4415 翼型作为飞行器 的翼型,该翼型具有较高的最大升力系数和较低的阻力系数。 机翼的具体参数如表 2 所示。
Байду номын сангаас表 2 机翼设计参数
翼型(机翼) NACA4415 6 1.2m 200mm 50mm 根梢比 面积 襟副翼展长 襟副翼位置 1 24dm2 520mm(单侧) 自翼尖起
引言
结构设计
方案确定好后,我们开始了总体设计,参照总体设计要 求,我们设计原则如下: (1)飞机最大起飞重量不超过 3.5kg,翼展小于 2m, 中央涵道可承载,1.5 公斤的力; (2)中央涵道不打开时,也能进行飞机的试飞; (3)飞机的试飞速度应当控制在地面遥控能接受的速 度,不能过高; (4)考虑飞机舵机和电池的装载位置,以保证更好的 结构质量分配,减少配重; (5)结构应当在满足强度、刚度、空间布置的要求下, 尽可能的轻 ; (6)由于增加了中央涵道,所以产生了反扭矩,为了 克服反扭矩,我们采用让垂尾打向一个舵偏来平衡涵道反扭
涵道尾撑式短距起降飞行器
本研究通过理论设计,制作样机,并进行试飞测试,验 证了该涵道飞行器具有优异的短距起降能力,为后续研究打 下基础。 翼气动布局,这导致传统无人机难以在复杂的地形中完成起 降,空中灵活性不足。于是我们希望设计一种兼备传统无人 机飞行速度高、航程大和直升机机动灵活、可在复杂地形完 成起降两种优点的新型无人机。于是我们开始在网上查询相 关资料,得知倾转旋翼机具备以上优势。于是我们进行了深 随着科技的发展无人机的使用及需求越来越广泛。如今 已经可以投入使用的无人主要采用固定翼,单旋翼 , 多旋翼 这三种布局。但这三种布局各有起降场地、作业范围受限; 噪音大、载重小、飞行速度慢;续航低、飞行速度慢的不足。 所以在城市环境中,传统的无人机比较难适应错综复杂的空 中环境从而很难获取到准确的战术信息。就上述而言,一种 兼顾传统布局优点,改善传统布局缺点,能在狭小地方起落, 并在复杂的空中情况下灵活机动的无人机变成了一个热点话 题。 本作品中所讨论的涵道式无人机具有可短距离起降甚至 空中悬停的特性,在体积、隐蔽性和飞行性能上都具有非常 鲜明的特点。涵道式飞机机动性独具特色,与固定翼飞机相 比,它可以围绕固定点悬停监视;但拉力又较同等功率的直 升机,前飞阻力小,速度高。由于涵道式无人机属于较为新 型的航空器,研究起步较晚,存在很多不足之处。 入讨论,认为该设计难点在于倾转旋翼结构的设计。但经过 反复讨论和向老师询问,我们认定该方案难以实现。于是在 老师的指点下,我们转变思路,决定设计一款涵道式无人机。 涵道风扇较同样直径的孤立风扇能产生更大的升力,且风扇 环括在涵道内,既可阻挡风扇气动声向外传播,又结构紧凑、 安全性高。涵道风扇可以满足我们对无人机短距甚至垂直起 降的性能要求。这个设计方案规避了倾转旋翼结构的难点, 同样可以实现预计设计目标。
一种新型涵道飞行器的设计与气动特性研究
明 : 新型微 型涵道 飞行器 不仅 可以悬停 、 直起 降和 以直升 机 模 式低 速 前 飞 , 该 垂 而且 能 以飞机 模 式
快速 前飞 , 并在 整个 飞行包 线 中具 有 良好 的气动特 性 。
关 键词 :流体 力 学 ;飞行器 ; 计 ;倾 转 ;动量 源 ;气 动特 性 设 中图分 类号 : 2 1 V 1 文献 标 志码 : A 文章 编 号 : 0 01 9 (0 2 0 -8 70 1 0 —0 3 2 1 ) 70 5 -7
wi d t n e e tn we e us d o t y t e e o y a c h r ce itc o u td a M AV i a iu n u n lt si g r e t sud h a r d n mi c a a trsi s f d c e f n n v ro s
De i n o w sg f a Ne Duc e n Ai c a t t d Fa r r f a d Is Ae o y a i n t r d n m c Cha a t rs i s a c r c e itc Re e r h
CAIHo g m i n - ng,ANG a— o g,DUAN e b H is n W n- o
s ft aey,c mp c tu t r n o os . Ho v r,t y g n r ly c n o l y f r r lwl n h lc p o a tsr c u e a d l w n ie we e he e e al a n y f o wa d so y i ei o — l
设计我们的小飞机

设计我们的小飞机介绍我们的公司计划设计一款小型飞机,旨在为人们提供方便快捷的个人空中交通工具。
这款小飞机将具备以下特点:1. 轻巧便携:小飞机将采用轻质材料制造,以确保重量轻便,方便携带和操作。
2. 环保节能:我们将采用先进的绿色动力系统,如电动或混合动力系统,以减少对环境的影响。
3. 安全可靠:小飞机将配备必要的安全措施,如高效稳定的飞行控制系统和安全气囊,以确保飞行过程中的安全性。
4. 简单易用:我们将设计简洁直观的飞行控制面板,使操作更加容易上手。
设计要点在设计小飞机时,我们将考虑以下要点:1. 机身结构:我们将设计坚固耐用的机身结构,以确保在飞行中的稳定性和安全性。
2. 飞行性能:小飞机将具备良好的飞行性能,包括合理的巡航速度和飞行距离,以满足乘客日常出行需求。
3. 舒适性:我们将注重乘客的舒适性,提供宽敞舒适的座位和良好的空调系统,以确保飞行过程中的舒适体验。
4. 操控性:小飞机将具备良好的操控性,包括敏捷的转向性和稳定的飞行特性,以便于驾驶员的操作。
时间计划为了按时完成小飞机的设计,我们将按照以下时间计划进行工作:1. 设计概念阶段:完成初步设计方案和技术评估,预计用时2个月。
2. 详细设计阶段:根据初步设计方案进一步完善细节,并制定详细的生产计划,预计用时3个月。
3. 原型制作阶段:制作小飞机的原型,并进行各项测试和调试工作,预计用时1个月。
4. 生产与交付阶段:根据原型进行生产,并逐步交付给客户,预计用时2个月。
结论通过设计我们的小飞机,我们将为乘客提供一种便捷、环保、安全和舒适的个人交通选择。
我们将按照时间计划和设计要点进行工作,以确保小飞机设计的顺利进行和按时交付。
小型涵道风扇式无人机

北京理工大学
Beijing Institute of Technology
三、模糊控制器设计
小型涵道风扇无人机研究工作汇报
涵道式无人机是通过 俯仰与滚转通道实现 姿态稳定。 两个通道对称,控制 器设计完全一样。
微 小 型 武 器 技 术 专 业
北京理工大学
Beijing Institute of Technology
北京理工大学
Beijing Institute of Technology
二、结构及模型分析
小型涵道风扇无人机研究工作汇报
微 小 型 武 器 技 术 专 业
北京理工大学
Beijing Institute of Technology
二、结构及模型分析
小型涵道风扇无人机研究工作汇报
基本方程:
v p
0 e=30 /s
6 / 60
NL
NM
NS
ZO
PS
PM
PL
-6
-4
-2
0
2
4
6
页面 1
北京理工大学
Beijing Institute of Technology
模糊控制器原理--反模糊化
NL
NM
NS
ZO
PS
PM
PL
e=5
0
6 / 30
-6 -4 -2 0 2 4 6
舵 机
6 / 30
i 1 4
F m v
M Iω
其中, p 表示位置向量, v 表示速度向量,
ω 表示角速度
向量,F 和M 表示飞行器所受的合外力以及合外力矩, I
表示转动惯量。
微 小 型 武 器 技 术 专 业
飞翼90涵道参数
飞翼90涵道参数全文共四篇示例,供读者参考第一篇示例:飞翼90涵道参数是飞行器设计中不可或缺的重要参数之一,涵道参数是指飞翼机翼截面的形状和尺寸。
在设计飞机机翼时,涵道参数的选择对飞机的飞行性能、气动效率和操纵性能等方面都有着重要的影响。
飞翼90是一种经典的涵道参数,具有较好的气动性能和结构强度,被广泛应用于各种飞行器中。
飞翼90的涵道参数取名为90,是因为其前缘后缘之间的夹角为90度,这种设计可以减小机翼的阻力,提高飞机的升力系数和升阻比。
飞翼90的设计还具有很好的空中稳定性和操纵性能,使得飞机在飞行时更加稳定和灵活。
飞翼90的设计还可以提高机翼的承载能力和减小结构重量,使得飞机具有更好的载荷能力和燃油效率。
在飞翼90的设计中,设计师需要考虑涵道参数对飞机性能的影响,包括机翼的升力和阻力特性、气动效率、速度范围和荷载分布等因素。
设计师可以通过数值模拟和实验测试来优化飞翼90的设计,以确保飞机的性能符合设计要求。
飞翼90的设计还需要考虑飞机的使用环境和任务需求,以确定最佳的涵道参数设置。
飞翼90的设计不仅适用于民用飞机,也适用于军用飞机、运载飞机和无人机等各种类型的飞机。
飞翼90的设计可以适用于不同类型的发动机和飞机结构,具有很好的通用性和适用性。
飞翼90的设计还可以结合其他飞机设计技术,如复合材料、螺旋桨等,进一步优化飞机的性能和效率。
飞翼90是一种经典的涵道参数设计,具有优越的气动性能、操纵性能和结构强度。
在飞机设计中,设计师可以根据具体需求选择飞翼90的设计,以满足飞机的性能和飞行要求。
飞翼90的设计可以为各种类型的飞机提供优化的设计方案,是飞机设计领域中的重要技术之一。
【2000字已达到】第二篇示例:首先我们来了解一下飞翼90的涵道参数是什么意思。
涵道参数是指风力发电机叶片的设计参数,涵盖了叶片的长度、形状、截面等多个方面的参数。
飞翼90的意思是指叶片采用了独特的设计形状,其涵道弧度为90度。
涵道风扇式微型飞行器的研究分析

本文 讨论 了涵 道 风 扇 的研 究 现 状 及 气 动 特 性 分
析, 介绍了 3 种 类 型的涵道 风扇 式微 型 飞行器 , 又从 旋
翼 的动量 理论 和叶 素理论 简单 分析 了涵道 风扇 的气 动
特性 , 对 于人们 了解 涵 道风 扇 结 构 并进 行 深 入 研 究 具
有一定 的意义 。
扇 结构 的 动力装 置起 重小 , 有效 载重就 小 , 而能 耗相对
其 风扇 安装 在涵 道机 体 的 中 上部 , 在 涵 道 机体 的 内部
风扇 的下方 安装 有用来 平衡 风扇反 扭矩 的可 调叶 片和 控 制舵 面 , 电机与 其他 器 件 都 安装 在 涵 道 上方 的中 心 体 内, 电机 为使用 燃料 的发 动机 , 上 方 中心体通 过 固定
收 稿 口期 :2 0 1 3 — 0 6 — 2 8 ;修 回 日期 :2 0 1 3 — 0 8 — 1 8
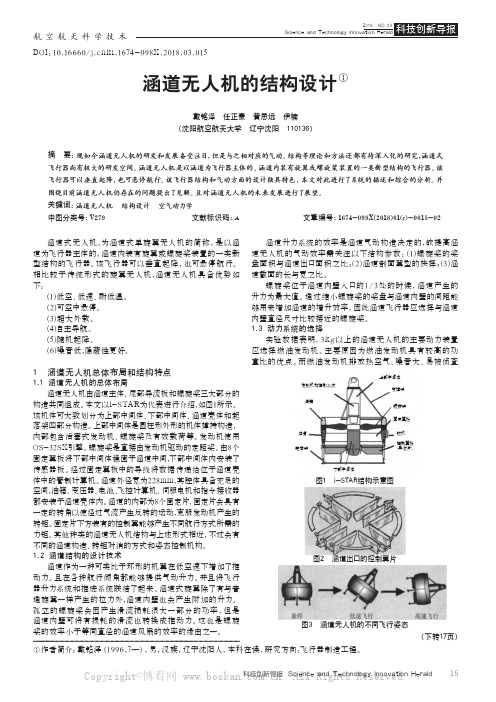
图l i - S T AR 的外 形 及 结 构
1 . 2 共 轴 双 旋 翼 涵 道 风 扇 式微 型 飞行 器
作 者 简 介 :方 如 金 ( 1 9 8 6 一 ) ,男 ,浙 江 慈 溪人 ,在 读 硕 士 研 究 生 ,研 究 方 向 ;航 空 宇航 制造 工程 。
风扇产 生 的气流 在 可调 叶 片 上产 生 气 压差 , 由此 产 生
力 矩来 平衡 风扇 产生 的一 部分反扭 矩 。在涵 道风扇 的 底 部安 装 了一组 控 制舵 面 , 气 流 同样 能 在 控 制舵 面 上 产 生气 压差 , 从 而 平 衡 风 扇产 生 的 反扭 矩 。控 制 舵 面 通 过转 动一定 的角度 来 实 现 飞行 器 的俯 仰 、 偏 航 和 翻 滚运 动 。这 种结 构布 局类 型 的典 型代表 是美 国联合 航
涵道无人机的结构设计
理、化学、材 料、机 械等众多领域的研究,发展非常广泛。但 是 还存在一定的问题,比方说材 料复活化,相融性 就会变得 小,而且在 加工过程中也会产生一定的问题。材 料力学性能 的 提 升以及在 航 天 空 航 天在 的环 境问题,这些问题都 是制 约了智 能 材 料发 展 的原因。
摘 要:现如今涵道无人机的研发和发展备受注目,但是与之相对应的气动、结构等理论和方法还都有待深入化的研究,涵道式
飞行器尚有极大的研发空间。涵道无人机是以涵道为飞行器主体的、涵道内装有旋翼或螺旋航行。该飞行器结构和气动方面的设计独具特色,本文对此进行了系统的描述和综合的分析。并
(1) 低 空、低 速、耐 低 温。 ( 2)可空中悬 停。 (3) 超 大 外 载。 (4)自主导航。 (5)随机起降。 (6 ) 噪 音 低,隐 蔽 性 更 好。
1 涵道无人机总体布局和结构特点 1.1 涵道无人机的总体布局
涵道无人机由涵道主体、尾部导流板和螺旋桨三大部分的 构造共同组成。本文以i-STAR为代表进行介绍,如图1所示。 该 机体可大 致 划 分 为上 部中间体、下 部中间体、涵 道壳 体 和 起 落架四部分构造。上部中间体是圆柱形外形的机体撑持构造, 内 部 包含 活 塞 式 发 动 机、螺 旋 桨 及有 效 载 荷 等。发 动 机使 用 O S -32 S X引擎。螺 旋 桨是 直 接由发动 机 驱动的定 距 桨。由8 个 固定 翼 板将 下 部中间体 稳固于涵 道中间,下 部中间体内安 装了 传感 器板。经 过固定 翼 板中的 导 线 将 数 据 传 递 给 位于涵 道壳 体中的管 制 计算 机。涵道 外径宽为2 2 8 m m,其腔体 具 备充足的 空间,油箱、变压器、电池、飞控计算机、伺服电机和指令接收器 都安装于涵道壳体内。涵道的内部为8个固定片,固定片会具有 一定的转角以使经过气流产生反转的运动,克服发动机产生的 转矩。固定片下方装有的控制翼能够产生不同航行方式所需的 力矩。其他种类的涵道无人机结构与上述形式相近,不过会有 不同的涵道构造、转矩对消的方式和姿态控制机构。 1.2 涵道结构的设计技术
涵道无人机研究现状与结构设计
涵道无人机研究现状与结构设计
涵道无人机研究现状与结构设计
涵道无人机具有垂直起降和悬停的飞行特性, 在体积、隐蔽性和飞行性能上都具有鲜明的特点, 已成为当今微小型无人机研究开发领域的研究热点.系统地介绍了涵道无人机的发展历史和现状, 并从结构设计和气动设计等角度综合分析了其技术特点, 从总体上归纳了涵道无人机的结构设计体系, 并对各部件工作机理和气动特点进行了分析.
作者:徐嘉范宁军作者单位:北京理工大学刊名:飞航导弹PKU英文刊名:WINGED MISSILES JOURNAL 年,卷(期):2008 ""(1) 分类号:V2 关键词:涵道无人机研究现状结构设计。
航模涵道进气道设计
航模涵道进气道设计航模涵道进气道设计是航模飞行过程中至关重要的一环。
一个优秀、合理的进气道设计,不仅能够提高航模的飞行性能,还能有效保护动力系统,延长使用寿命。
本文将以生动、全面的方式为大家介绍航模涵道进气道设计的重要性及其具体步骤,希望能给大家带来一些指导意义。
首先,航模涵道进气道设计的重要性不言而喻。
进气道的设计直接影响到发动机的供气质量和动力输出,对航模的飞行性能有着至关重要的影响。
一个良好的进气道设计可以保证发动机能够充分吸入清洁、充足的空气,提高效率,减少能耗,同时也对发动机有良好的保护作用。
在进行航模涵道进气道设计时,需要考虑以下几个方面。
首先是进气道的位置和形状。
进气道的位置应该考虑到飞行时的气流情况,避免高速飞行时的气流扰动。
形状方面,可以采用圆形、矩形或者椭圆形等各种形状,具体选择应根据航模的气动特性和设计需求来确定。
其次是进气道的尺寸。
进气道的尺寸需要根据发动机的需气量来确定,应保证发动机可以充分吸入足够的空气。
同时,还需要考虑到空气的阻力和流经进气道时的损失,避免过大的阻力和能量损失。
另外,航模涵道进气道设计还需要考虑到进气道的滤网和水密性。
滤网的作用是阻止杂质和颗粒物进入发动机,保证其正常运行和寿命。
水密性方面,要确保进气道在遇到雨水或者湿润环境时不会导致发动机进水,避免发生意外情况。
最后,在航模涵道进气道设计中,还需要进行实际的实验和测试,对设计效果进行验证。
通过实验和测试,可以不断优化进气道的设计,提高航模的整体性能和可靠性。
综上所述,航模涵道进气道设计是航模飞行中不可忽视的一部分。
一个优秀的进气道设计能够提高航模的飞行性能,保护动力系统并延长使用寿命。
在设计过程中,需要考虑进气道位置、形状、尺寸、滤网和水密性等因素,并进行实验验证。
希望本文所介绍的内容能够对各位航模爱好者在进气道设计中有所帮助。
尾推及涵道F16的制作

尾推及涵道F16的制作尾推及涵道F16的制作Tags: F16, 推及, 泡沫, 制作, 剖面这边论坛水分少,编辑了以前的一个帖子,给各位DIYER参考。
制作的目标:涵道F16 先找到F16的线图,最好是有剖面的那种,例如这张。
构思好制作的比例,根据涵道的大小、参考商品机的设计,我将比例定为1/16,机长90cm,翼展60cm。
将图片以光栅图像的方式导入AUTOCAD,调整图片大小,使之刚好缩小到1/16的实际大小。
逐个描剖面,一边描一边对侧视图、俯视图,图纸的剖面有时会有误差。
剖面描完以后,要作修改,比如要根据泡沫的特点将一些太薄的部分改厚一点,要在机身中根据电池的尺寸开电池舱,根据涵道的尺寸机身留洞,要注意重心的位置以及推力线的位置,作弊孔的位置,等等。
画好的截面图,上面的是尾推版本的机身后段,右边两个的缺口是放电机木棍的位置。
下面的是涵道版本的,推力中心通过主翼与尾翼,左面两个的缺口是电机电线的通道。
完成剖面的绘制后,将文件导入3DMAX,主要是为了直观一点的修正完善,不用试做实物,节约时间。
按实际间距、空间位置排列好的剖面线图然后转成立体体块,可以用不同的命令实现。
机身段的三维模型渲染出的图像比较夸张的“超现实作弊孔”,在主翼下方新搞的70mm涵道,据说可以达到1000g静推力涵道的三维模型机身的内部,电池舱,进气道,还有涵道的位置机身掏空比较多,空机应该重量200g左右三维模型是反映了实际切出来以后的状态,因此机身还是分段的折线,打磨前的状态。
通过这个模型,可以修正设计上的错误。
比如通过这个发现了电池舱内部并不是直线的矩形空间,不便电池的放置,修改了从涵道位置向前看的机身内部,上面的孔是电线的通道,下面的孔是进气口、作弊孔。
多次修改最后确定的模型各个角度最后完成的CAD图,准备拿去做模板5mm有机玻璃片做的模板,也可以用厚纸板,最好当然是用金属板,不过挺费劲的……到此,模板的制作已经完成,接下来就是实际操作了。
小型涵道式无人机的研究进展
另外英国还研制了一种碟式无人机, 如图 3 , 该无人机还在室内实验阶段.
图3
碟式无人机
1. 1. 3 “扇尾” ( Fantail) 无人机 新加 坡 也 推 出 了 自 己 的 涵 道 风 扇 无 人 机 Fantail( 见图 4 ) , “扇尾 ” 3000 和“扇尾 ” 5000 包括 5000 从 2001 年开始研 垂直起落无人机. “扇尾 ” 制, 机体结构比 3000 型更简单也更轻, 但全重由 后者的 3 kg 增至 5. 5 kg, 这是因为采用了一台更 大的发动机并提高了有效载荷能力. 该机可搭载 400 g 有效载荷, 最大平飞速度 111 km / h( 比 3000 型快) , 可在 5 km 半径处盘旋 30 min. 该机具有垂 直起降以及水平高速飞行的能力 . 在结构上, 该无 人机涵道长径比较小, 涵道出口处周向布置了六 用于转矩的平衡;在控制舵片下方还安 片控制舵, 装有呈十字布放栅格尾翼, 用于控制无人机的飞 行姿态.
图4
新加坡 Fantail 5000 无人机
1. 2
国内研究现状
与国外的研究成果相比, 我国在涵道式无人 机方面的研究起步较晚, 仍处于起步阶段, 还有很 多关键技术问题尚在初步的摸索研究中. 南京航 空航天大学通过风洞实验分析了涵道风扇升力系 统的升阻特性, 指出涵道风扇作为升力装置仅适 合于强调悬停和低速飞行性能的飞行器, 对涵道 [3 - 4 ] . 式无人机的设计有很大的指导意义 本文研制的小型涵道式无人机, 是基于美国 i - star[5]的原理设计的, 目前处于实验阶段, 并取 得了较好的实验结果.
1
无人机发展
无人机是指不搭载操作人员的一种动力空中 飞行器. 无人机采用空气动力为飞行器提供所需 的升力, 能够自动飞行或进行远程引导;既能一次 性使用也能进行回收; 能够携带致命性或非致命 性有效负载. 弹道或半弹道飞行器、 巡航导弹和炮 弹不能看作是无人空中飞行器.
飞机总体设计个人报告
飞机总体设计个人报告在此次小组设计中我的工作任务是初步估算飞机最大起飞重量,并查找资料。
一、主要工作内容:在飞机最大起飞重量估算过程中我才用了重量系数法,过程中所需参数如下:“硬”数据:–设计要求,包括外载、航程、航速假设数据:–巡航耗油率(与发动机有关)–巡航升阻比(与气动布局有关)(1)本次我们小组的设计要求部分数据如下:巡航速度:1.5Ma巡航航程:3000Km巡航升阻比根据同类飞机暂定为4.5假设涵道比为0.2,由下图估算查出出耗油率为:9.6外载荷如下:雷达AN/APG-77武器PL-7(90kg )、PL-12(200kg )、雷霆-2(564kg )、YJ-8(800kg ),23-3机炮(50kg ),炮弹200发(50kg )乘员:1人 100kg有效载荷:3000kg(2)最大起飞重量可表示如下:to empty payload fuelW W W W =++其中to W 表示最大起飞重量,em p ty W 表示空机重量 payload W 为外载重量,fu e l W 为燃油重量。
可用系数表示如下:1emptypayload fuel to to to W W W W W W ++=即:空机系数+外载系数+燃油系数=1其中,空机系数由统计关系确定,为此搜集11种同类飞机数据如下:Wto We11500 646017600 950018832 1040519050 897222200 1019629900 1870031800 1330033000 1960033724 1819138000 19700表格中Wto为最大起飞重量,We为其空机重量。
由表中数据进行一元线性拟合,得到最大起飞重量与空机重量的关系曲线。
(3)燃油系数的估算燃油系数主要由任务剖面巡航阶段确定,其他阶段的的燃油系数可由查下表得到:巡航阶段燃油系数可用Breguet航程方程确定,对于喷气为推力的飞机,航程计算公式为:其中:V: 是巡航速度(Knots )C: 是发动机耗油率(lb/hr/lb)L/D: 巡航阶段的升阻比W initial :巡航起始时的飞机重量W final :巡航结束时的飞机重量将上面公式变形得:其中:Range :巡航段航程( N. Mi)a : 是巡航高度上的声速( Knots ),此次设计中高度11000m ,a=295m/s C : 是发动机耗油率(lb/hr/lb)L/D : 巡航阶段的升阻比M :马赫数将设计要求以及假设数据代入得到燃油系数为:0.35f u e lt o W W ,然后根据同类飞机估算出三个最大起飞重量,利用已经估算出的燃油系数以及有效载荷可得到对应的三个空机重量,然后在统计图中画出此三点确定的曲线,此曲线与之前统计规律曲线的交点即为所求最大起飞重量和空机重量,如下图:如图所示,求出最大起飞重量为36t,空机重量为19t此为进行最大起飞重量估算的整个过程。
一种小型涵道无人机研究设计的开题报告
一种小型涵道无人机研究设计的开题报告
尊敬的评委老师:
在现代无人机技术日益成熟的今天,我打算从小型涵道无人机角度入手,研究设计一种满足特定需求的小型涵道无人机。
本设计将以满足环保监测、农业观测以及城市景观监控为目的。
该款小型涵道无人机将采用嫁接双螺旋桨、开放式中心涵道和螺旋桨后拉式构造,以降低机体噪音和航行阻力。
设计思路如下:
1. 外观设计:该款小型涵道无人机采用汽车前灯仿生外观设计,上方设计空气动力装置,下面为开放式中心涵道,保证机体轻巧,流线型美观。
2. 硬件系统:涵道无人机的主要部件为电池、控制系统、运动部件、传感器等。
电池以及控制系统一起组成了飞行控制的常用设备,而传感器则是涵道无人机获取外部环境信息的重要途径。
3. 软件系统:涵道无人机采用导航功能,以GPS定位和数据传输为基础。
软件部分主要由两个部分组成:飞行控制系统和数据采集系统。
飞行控制系统包含机器人操作系统(ROS)、PID控制算法、飞行参数优化控制系统等。
数据采集系统负责数据的采集,储存、分析和传输,包括图像传输,语音采集,传感器数据采集等。
4. 具体实现:该无人机将嫁接双螺旋桨、开放式中心涵道和螺旋桨后拉式构造等创新设计,使得机体噪音降低,航行阻力减小。
该涵道无人机采用最大飞行高度1200米,最大航行距离2000米,约60分钟左右的续航能力,能够将收集到的数据通过无线信号实时传输至地面终端,并进行数据处理和分析。
以上是本设计的主要思路和方案,希望得到评委的关注和支持。
谢谢!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
小型涵道无人飞机设计报告学生名称:何伟明指导老师:蒋阳(一)内容及要求,1,了解无人机发展状况用途及性能要求2,基本掌握轻型飞机的总体布局方法3,掌握飞行器总体飞机的性能分析和计算方法(二)主要技术指标1,写出总体方案报告2,画出三视图3,估算与分析整体飞机性能设计任务书(一):涵道无人飞机的性能技术指标及要求(二):飞机重量估算(三):飞机推重比及翼载荷的计算1,起飞推重比2,起飞翼载荷(四):飞机布局形式的选择1,总体布局形式的选择2,部件布局形式的选择(五):飞机动力装置的选择1,涵道的参数2,进气口面积的计算与选择(六):飞机部件几何参数的选择与计算1,机翼几何参数的选择与计算2,机身几何参数的选择与计算3,尾翼几何参数的选择与计算(七):机翼和尾翼翼型的选择1,机翼翼型的选择2,尾翼翼型的选择(八):飞机总体飞行性能参数计算与校验1,速度特性2,起降特性(九)飞机三视图(一) 涵道无人飞机的性能技术指标及要求1,失速速度:70Km/h=63.79ft/s2,最大速度:100Km/h=91.13ft/s3, 起飞距离55m=180.45ft4, 续航时间:6min=360s5,动力装置:90mm涵道6,动力来源:6s电池,两块6s的电池并联(二)飞机重量估算起飞重量计算起飞重量主要由飞机空重We,飞机的任务油重Wf(这次设计主要是电池,所以不涉及到油的重量),和任务载荷Wp用公式表达为Wo=We+Wp用空重系数表达为Wo=Wp/(1-We/Wo)本次设计把电动涵道,电池,电调,舵机重量,起落架作为任务载荷即Wp=W(涵道)+W(电池)+W(电调)+W(舵机)+W(起落架)飞机空重系数表达式:We/Wo=0.99Wo09.0-因本次飞机采用玻璃纤维-环氧树脂结构,而不是高级的复合材料,统计的估算表明,用玻璃纤维-环氧树脂复合材料制成的自制飞机的空重系数大约是金属自制飞机空重系数的0.85倍,所以飞机空中系数调整为We/Wo=0.8415Wo09.0-任务载荷重量主要由电动涵道(400克), 两块6s电池(500),5个舵机(55克/个)起落架加电调共475克即Wp=2150克=4.74Ib即Wo=4.74/(1-We/Wo)= 0.8415Wo09.0-数据进行迭代通过计算迭代所得重量取起飞重量:6.4Kg 空机重量:4.24Kg 任务载荷:2.15Kg (三)飞机起飞推重比和起飞翼载荷的计算起飞推重比(T/W)的计算因为预先得知本次设计的飞机有足够的推力,,考虑到飞机翼尖失速问题,所以选经典展弦比作为参考值7所以暂选展弦比为A=6.5根据经验公式:Kmax=0.88√(A/C总废阻)A :展弦比 6.5C总废阻:这个是总废阻力系数,是由飞机零升阻力系数和飞机巡航时的诱导阻力的总和,因为现在还没有具体的气动外形,这里就根据经验取飞机的零升阻力系数CD为0.02,诱导阻力系数根据公式C诱=CL2/∏×A e,这里的C L是升力系数,暂取经验升力系数为1.2,根据公式估算到诱导阻力为0.08,所以总的废阻力系数为0.09所以Kmax=0.8√(6.5/0.09)=7计算值巡航T/W=1/(L/D)=1/7=0.143hp/kg经验公式hp/Wo=aVmaxC其中a=0.004 c=0.57hp/Wo=0.004 Vmax 57 .0取最大速度Vmax=100Km/h=91ft/s代入公式的hp/Wo=0.052hp/Ib=0.1146hp/Kg已知90mm涵道飞机的静推力是3.3kg所以T/W=3.3/6.8=0.48因本次设计不涉及油的重量,所以不涉及到起飞还是巡航,只涉及到电池的放电时间,综上取最大推重比0.48 翼载荷的计算根据失速速度确定的翼载设计要求失速速度为Vm in70Km/h=63.79ft/sW1=0.5ρVm in2sC L海平面:ρ=0.00238sLug/ft3起飞升力系数CL tekeoff =0.8 CL max根据资料所得CL max =1.5 代入上式得CL tekeoff=1.2又Vm in≦63.79ft/s将以上数据代入升力公式W1/S≦0.5ρVm in2C L=5.81Ib/ft2根据最大航时确定的翼载本次设计最大航时为6min,为涵道式喷气式飞机其计算公式为W/S=0.5 ρVm in2√∏AeC Dρ=0.00238sLug/ft3Vm in =63.79ft/s A=6.5 CD=0.09(上面已估算)W/S=5.86 Ib/ft2综上取最小翼载为5.86 Ib/ft2,最大推重比为0.48(四)飞机布局形式的选择常见的飞机总体气动布局形式1,常规布局,就有大量的设计经验可供参考2,鸭式布局气动效率高,当我们的设备都放在比较靠后,将使飞机重心进一步后移,会加大飞机的静不稳定性,所以不采用。
3,飞翼布局具有能达到很高的升阻比的效果,气动效率高,但是它会对操稳带来很多问题,因本次设计是比较简单的电动涵道,所以不采用飞机的总体布局综上决定采用常规布局形式飞机部件布局形式的选择机翼采用小展弦比的后掠机翼,可便于制作,提高横侧安定性尾翼采用正V尾,跟其它尾翼比起来,V尾的浸湿面积小,有利于减小型阻动力装置为90mm涵道,装在机身中后段,本次设计采用机身后半段部分进气,这样有利于飞机起飞时的防止地上碎石卷进进气道内。
涵道的参数与选择本次设计采用90mm涵道,用两组6s电池,采用并联,电池容量增加,相应得电流也会增加,6s的电池的容量为2500mAH,6s电池的数据两块即为5000mAH ,电池的放电倍率是30c,电池的最大放电电流是150A(5×30c),所以电流足够来维持涵道达到指定值,涵道的最大工作电流为70A,但飞机飞得时候不能用70A来飞,这样会损坏涵道,我这里取50A,根据涵道的50A的工作电流来算,即时间5Ah÷50A=0.1h=6min,可以达到要求进气口面积的计算本设计采用机身上面进气,因为机身上面进气口,其通道长度较短,有助于减轻重量,在机身上面进气有利于防止在飞机启动时地面碎石进入进气道,有助于气流进入进气口捕获面积的计算进气口捕获面积=AC(in)2发动机流量=M(Ib/S) 根据经验得知,发动机流量可用发动机前端面直径平方的0.18倍,或发动机最大直径平方的0.12倍来估算。
这里取0.18倍。
用90mm涵道的风扇,速度在100km/h=0.08Ma90mm=3.5433in 即3.54332×0.18=2.2599(Ib/S)根据飞机总体设计第154页的图10.13可知这里取3.7 即AC(in)2/ M(Ib/S)=3.7带入公式得AC(in)2=8.3616(in)2=0.0054m2 90mm涵道前端面的面积的计算3.14×0.0452=0.0064 m2一般的进气口面积即喉道面积为发动机的70﹪~80﹪所以综合以上数据取捕获面积为0.005 m2“扩散段”的计算扩散段是进气口的内部的一部分,在扩散段内,亚音速气流进一步减速到发动机所需的速度,因此,扩散段的捕获面积应从前到后增加。
因为设计的飞机速度不高,所以,扩散段的长度这里暂取发动机前端面的直径5倍,即450mm,即45cm出口面积的计算对于最初的设计布局,可以估算的捕获面积为基础,进行合理的近似,对于一个处于关闭位置时的亚音速收敛-扩散式喷口管所需的出口面积约为捕获面积的0.5~0.7倍,这里取0.6倍即出口面积为0.0054m2×0.6=0.00324 m2(六):飞机部件几何参数的选择与计算机翼参数的计算与选择已知Wo/S=5.86 Ib/ft2Wo=6.4Kg=14.11 Ib 所以机翼面积为14.11/5.8=2.4328 ft2=0.23m2又展弦比A=6.5 根据公式A=b2/S即机翼翼长b=122cm=1.22m当根梢比为0.45的时候其机翼升力分布近似椭圆型机翼的升力分布,所以这里取λ=0.45翼根弦长2S/b(1+ λ)=26cm翼尖弦长26×0.45=11.7cm机翼后掠角的选择,因为考虑和保障飞机横测安定性定为100,因为100相当于飞机机翼上反角为10平均气动弦长的计算(1+λ+λ2)/(1+λ)C=(2/3)C根C=19.75cm距翼根处的距离为Y Y=(b/6)〔(1+2λ)/(1+λ)〕Y=26.64cm机翼安装角为20无负扭转角副翼的安排与计算通过参考文献得知副翼一般约为机翼弦长的15~25﹪,这里取20﹪,通过查图得知副翼和机翼展长的比值为0.4 机翼三视图机身长度的计算长度=AWo C A=3.5 c=0.23 Wo=6.4kg 计算得长度为 1.3m,机身外形的初步设计尾翼参数的计算尾翼面积的计算S平尾 =CHTc S W/LHTS垂尾 = CVTb S W/L VT本设计的是正V尾所以力臂一样平尾所需要的面积为力臂L=55.3cm 机翼面积S W=0.23m2机翼翼展b=1.22 m2机翼的平均气动弦长c=20cm取CHT =0.7 CVT=0.04代入上式得到S平尾=5.8dm2 S垂尾=2 dm2转化为正V尾的所需要的面积是SV=3.1 dm2与水平夹角为200根据资料查的尾翼的=0.45 A=5 前缘后掠200尾翼副舵面的面积的计算,升降舵和方向舵的展长一般为尾翼展长的90%,弦长一般为尾翼弦长的25~50%左右,这里取25%通过计算为,得到基本尺寸机翼和尾翼翼型选择与计算机翼翼型的选择与计算初始翼载荷 W/S=5.8 Ib/ft2通过上式知道起飞前的升力系数为 1.2=69000VL=69000×19.44×0.1975=264919雷诺数 Re为了完成本次设计,决定选取N 60翼型N 60翼型数据尾翼翼型的选择V尾翼型的选择V尾翼型的选择原则就是平尾要比机翼后失速,以保证飞机机翼失速之后还能控制,表现在翼型厚度上,就表示要选择相对厚度要比机翼翼型相对厚度厚的翼型,N 60翼型的相对厚度是12.37% ,所以我这里选取对称翼型NACA0013,一是它阻力小,二就是便于做结构。
NACA0013的翼型数据飞机总体飞行性能参数计算与校验速度特性整机阻力估算D=0.5ρV2SC总废DC总废D =C0D+CL2/πAeC0D=1.1×(C翼型+S身C身/S机翼+S尾翼C尾翼/S机翼+S发动机C发动机/S机翼)计算得C0D= 0.06 CL2/πAe=0.08所以D=3.37Ib=1.55Kg起飞速度,因为起飞速度是失速速度的 1.1倍,失速速度为70km/h所以起飞速度是77km/h最大平飞速度飞行的速度增大时,飞机的阻力也随着增大,克服阻力需要推力,所以飞机的需用推力值T需用就是飞机的实际阻力值D最大,最大需可推力T可用减去阻力D或者减去需用推力T需用,所剩的推力△T为△T= T可用-T需用速度越接近最大,剩余推力△T就越小,直到△T等于0,此时的速度即为最大平飞速度即Vm ax =√2T/ρCDS已知T=3kg=6.6Ib S =2.4328 ft2ρ=0.00238sLug/ft3 CD=0.06+0.08=0.14所以Vm ax=128ft/s=140km/h飞机的起降特性W/S=(TOP)δCLTO(T/W)W/S=5.8Ib/ft2δ=1 CLTO=1.2/1.21=0.99 T/W=0.48 解得起飞参数TOP=12通过查表得知为200ft =60m ,基本符合要求飞机三视图好的,谢谢大家听我讲这么多的废话。