电子燃油喷射技术正时分析
汽车电子燃油喷射系统的诊断与维修
汽车电子燃油喷射系统的诊断与维修汽车电子燃油喷射系统是现代汽车引擎的重要组成部分,它控制着发动机的燃油供给,确保引擎能够以最佳状态运转。
在汽车维修行业中,诊断和维修汽车电子燃油喷射系统是一项必要且常见的任务。
本文将重点讨论汽车电子燃油喷射系统的诊断和维修方法,以及一些常见问题的解决方案。
一、汽车电子燃油喷射系统的诊断方法1. 使用汽车诊断仪进行故障码读取:现代汽车配备了OBD (On-Board Diagnostic)系统,通过汽车诊断仪可以读取汽车电脑中存储的故障码,从而确定问题所在。
根据故障码的不同,我们可以了解到具体的故障情况,帮助我们更快地找到解决方案。
2. 检查燃油压力:燃油压力是汽车电子燃油喷射系统中的一个重要参数,对发动机的运行起着重要的作用。
通过使用燃油压力表,可以测量燃油压力是否正常,如果燃油压力过高或过低,可能是由于燃油泵、燃油滤清器等部件出现故障。
3. 检查喷油嘴工作状态:喷油嘴负责将燃油喷入汽缸中,如果喷油嘴出现故障,可能导致汽车无法正常启动或失去动力。
通过对喷油嘴进行检查,可以判断其工作状态是否正常,如有必要,可以进行清洗或更换喷油嘴。
4. 检查曲轴和凸轮轴传感器:曲轴和凸轮轴传感器是汽车电子燃油喷射系统中的重要传感器,它们负责检测曲轴和凸轮轴的转动位置和速度。
通过检查传感器的工作状态,可以确定这些关键部件是否正常工作。
5. 检查进气和排气系统:汽车电子燃油喷射系统与进气和排气系统有密切的关联,如果进气和排气系统出现问题,可能会影响汽车的燃烧效率和运行状态。
通过检查进气和排气系统的状态,可以排除这些系统的故障。
二、汽车电子燃油喷射系统的维修方法1. 更换燃油泵:燃油泵是汽车电子燃油喷射系统中的重要组成部分,如果燃油泵出现故障,可能会导致汽车无法正常启动或失去动力。
在更换燃油泵之前,需要先排除其他可能的故障,并确保是燃油泵本身出现了问题。
2. 清洗喷油嘴:喷油嘴是汽车电子燃油喷射系统中的关键部件,如果喷油嘴堵塞或积碳严重,可能会影响燃油的喷射效果。
第三节 燃油喷射控
(2)减速时燃油的修正系数FDC
减速时燃油的修正系数FDC同样受发动机负荷和冷却液温度的 影响。如下式: FDL2是满足发动机负荷变化量的 修正系数。
FTH2是满足冷却液温度不同时的修 正系数。
5.急加速时的异步喷射 急加速时的异步喷射是与曲轴转动角度不同步的临时喷射。 而异步喷射虽也同样是加速时的燃油量修正,但它是在急加速 工况下,由于燃油来不及供给而实行的临时性燃油增量喷射。 为了有效地进行异步喷射,需要快速准确地检测出加速工况。 在表征发动机状态的各种参数中,利用节气门开度的变化量可 以最快地检测加速工况。 假设节气门开度为THA,用一定 时间间隔的节气门开度变化量,就 可以确定异步喷射量。节气门开度 变化量△THA越大,吸入的空气质量 越多,则所需要的异步喷射油量也 越大。
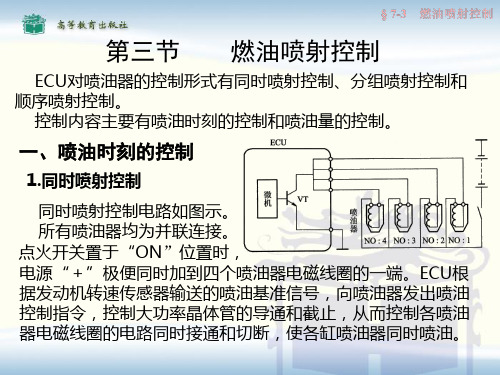
通常曲轴每转360°,各缸喷油器同时喷油一次。由于在发 动机的一个工作循环中各缸同时喷油两次,因此这种喷射方式 也称同时双次喷射。两次喷射的汽油,在进气门打开时一起进 入气缸。图示为同时喷射控制的喷油正时。
这种喷射方式是所有各缸喷油器同时喷射,所以喷油正时 与发动机进气、压缩、作功、排气的工作循环没有关系。其缺 点是由于各缸所对应的喷射时间不可能最佳,会造成各缸的混 合气形成不一样。但这种喷射方式不需要气缸判别信号,且控 制电路结构和软件较为简单,因此,目前这种喷射方式仍有一 定的应用。
2.分组喷射控制 分组喷射控制电路如图示。 每组中喷油器为并联连接, 两组喷油器的搭铁回路分别由 不同的大功率晶体管控制。当 ECU从发动机转速传感器接 收到某组喷油器的喷射控制信号时,便发出喷油控制指令,控制 该组中的大功率晶体管导通,从而接通喷油器电磁线圈的电路, 喷油器开始喷油。 发动机每一工作循环中,各缸喷油器均喷射一次或两次。 一般多是发动机每转360°, 只有一组喷油器喷油。 分组喷射控制的喷油正 时如图所示。
电控燃油喷射系统简介(2008.12)
说明
HD型 无(小)压力室喷嘴、小 孔径、高压力 上海亚新科依波尔GD-1 双霍尔/磁电传感器 单霍尔传感器 NTC型 电位器+怠速开关
数量
1 按发动机缸数 1 1 1 1 1 1 1 1
Copyright© ASIMCO Technologies Limited
电压/ NTC型
NTC型 按整车厂制作
Copyright© ASIMCO Technologies Limited
பைடு நூலகம்、电控燃油喷射系统概况
• 电控单体泵与共轨的比较: ——共轨的最大优势在于驱动扭矩小、低噪音、高的喷射 稳定性和灵活的喷射过程控制; ——最大不足是匹配标定周期长、环节多,油品适应性差, 一般需要四气门缸盖; ——单体泵的最大优势在于先缓后急的喷油规律,有利于 降低NOx 排放;适用于两气门和传统机械式喷油器;油 品适应性强,技术换代成本低;国产系统更便于售后服务; ——最大不足在于喷射灵活性和低速喷油稳定性不如共轨 系统;低速噪音没有明显改善、驱动扭矩大;
Copyright© ASIMCO Technologies Limited
二、电控单体组合泵—结构参数 电控单体组合泵 结构参数
单体组合泵主要结构参数
结构参数 :
• • • • • • • • • 缸心距:51mm; 柱塞直径X行程:φ10(11)×16( 6缸) 、 φ9(10)×14(16) (4缸); 许用泵端压力:160MPa; 最高喷射压力:180MPa; 柴油机最高许用转速: 6缸:3000r/min;4缸:4000r/min; 可匹配柴油机缸数:4~8缸; 单缸最大功率:65kw; ECU工作电压:24v; 连接方式:法兰、托架(同P7100泵/PM泵)。
雅阁汽车电喷系统
摘要在现代汽车上,机械式或机电混合式燃油喷射系统已趋于淘汰,电控燃油喷射系统因其更优越的性能而开始普及。
本田雅阁轿车电子控制燃油喷射系统采用的是电子控制程序控制多点燃油喷射系统,该系统主要接收各传感器的信号,通过喷油器、怠速空气控制阀和燃油蒸发控制电磁阀等执行器,实行燃油喷射量、怠速空气及燃油蒸发等多项燃油系统的控制。
本文主要介绍本田雅阁电控燃油喷射系统的结构、工作原理及相关的检修。
本田雅阁燃油喷射系统以发动机微机(ECM)、进气系统、燃油喷射控制系统、燃油供给系统、可变配气相位正时及气门升程电子控制系统(VTEC)准确的控制燃油的喷射,并保证空燃比维持在14.7:1的最佳状态。
保证汽车以最小的排量行驶在道路上。
除此之外,本文以本田雅阁电控燃油喷射系统的结构为基础,对电控燃油喷射三大系统的检修进行了详细的介绍,并结合实例分析、排除本田雅阁轿车的电控燃油喷射系统的故障。
本论文主要是介绍一些关于雅阁汽车电控燃油喷射的常见故障的诊断,根据以下文献、资料具体分析广本雅阁汽车电控燃油喷射的常见故障。
并通过现实的例子来分析雅阁汽车电控燃油喷射常见故障及诊断方法,同时这也是本论文的主题。
关键词:发动机微机、燃油喷射系统、电控、VTEC、故障目录第一章本田雅阁汽车概述 (2)1.1 本田雅阁轿车概述 (2)第二章本田雅阁汽车电控燃油喷射系统 (5)2.1 本田雅阁电控燃油喷射系统 (5)2.2 PGM - FI 系统组成 (7)2.2.1 燃油供给系统 (7)2.2.2 空气供给系统 (8)2.2.3 电控系统 (9)第三章本田雅阁汽车电控燃油喷射系统检修 (12)3.1 故障诊断遵循的步骤 (12)3.2 燃油供给系统的检修 (12)3.3 空气供给系统检修 (14)3.4 电控系统的检修 (15)第四章本田雅阁电控燃油喷射系统检修 (18)总结 (20)参考文献 (21)致谢 (22)第一章本田雅阁汽车概述1.1 本田雅阁轿车概述自1976年第一代雅阁的诞生至今的第八代雅阁,历经30多年,本田雅阁依旧是中级车领域的翘楚。
电控汽油喷射系统的工作原理

小结:
1、电控汽油喷射系统的工作原理 2、喷油正时 3、喷油量的控制 4、断油控制 5、异步喷射
作业:
1.启动后各工况下喷油量的修正 内容有哪些? 2.断油控制包括哪些内容?
汽车电子控制技术
主讲人:于京诺
2.电控汽油喷射系统的工作原理
喷油量由喷油器喷孔的横断面面积,汽油的喷射压力和喷 油持续时间来决定。 喷孔的横断面面积和喷油压力都是恒定的,汽油的喷射量 只取决于喷油持续时间。 喷油持续时间由ECU根据发动机的各种参数确定,ECU通过 输出喷油脉冲信号的长短控制喷油时间,即喷油量大小。
② 启动后的喷油控制
喷油信号持续时间=基本喷油持续时间×喷油修正系数 +电压修正值
B.启动后各工况下喷油量的修正 d. 大负荷加浓 发动机在大负荷工况下运转时,要求使用浓混合气以获得 大功率。大负荷的加浓量约为正常喷油量的10%到30%。 e. 过渡工况空燃比控制 发动机在过渡工况下运行时(即汽车加速或减速行驶),为 获得良好的动力性、经济性、响应性,空燃比应作相应变化, 即需要适量增减喷油量。
② 启动后的喷油控制
喷油信号持续时间=基本喷油持续时间×喷油修正系数 +电压修正值
B.启动后各工况下喷油量的修正 f. 怠速稳定性修正(只用于D型EFI系统)
由于压力较转速滞后,转矩也较转速滞后,造成发动机转速上升时, 转矩也上升,转速下降时,转矩也下降。 为了提高发动机怠速运转的稳定性,ECU根据PIM和Ne信号对喷油量 作修正。随真空度△P的增加或随转速△N的下降而增加喷油量。
1) D型EFI系统
D型EFI系统的工作原理
(1) 燃油压力的建 立与燃油喷射方 式 (2) 进气量的控制 与测量 (3) 喷油量与喷油 时刻的确定 (4) 不同工况下的 控制模式 启动加浓、暖 机加浓、加速加 浓、全负荷加浓、 减速调稀、强制 怠速断油、自动 怠速控制等
汽油机电控燃油喷射系统
返 回
二、EFI系统的工作原理
(一)D型汽油喷射系统工作原理 (二)L型汽油喷射系统工作原理 (三)Mono系统工作原理
(一)D型汽油喷射系统
1.燃油压力的建立与燃油喷射方式 2.进气量的控制与测量 3.喷油量与喷油时刻的确定 4.不同工况下的控制模式 5.D型汽油喷射系统的特点
1.燃油压力的建立与燃油喷射方式
c、进气温度修正
d.大负荷加浓 e、过渡工况空燃比控制
f、怠速稳定性修正
返 回
断油控制
急减速断油控制:发动机在高速下运行急减速时,节 气门完全关闭,为避免混合气过浓、燃料经济性和排 放性能变坏,ECU停止喷油。当发动机转速降到某预定 转速之下或节气门重新打开时,喷油器投入工作
发动机超速断油控制:为避免发动机超速运行,发动 机转转速超过额定转速时,ECU控制喷油器停喷。
4.不同工况下的控制模式
电子控制汽油喷射系统的电脑能根据各个传感器测得的发 动机各种运转参数,判断发动机所处的工况,选择不同模 式的程序控制发动机的运转,实现起动加浓、暖机加浓、 加速加浓、全负荷加浓、减速调稀、强制怠速断油、自动 怠速控制等功能。
5.D型汽油喷射系统的特点
优点:D型汽油喷射系统具有结构筒单、工作可靠等优点, 缺点:在汽车突然制动或下坡行驶中节气门关闭时,加速 反应效果不良;当大气状况较大变化时,会影响控制精度。 实际应用:现代汽车使用的D型汽油喷射系统都是经过改 进了的,即采用运算速度快、内存容量大的电脑,大大提 高了控制精度,控制的功能也更加完善。
单点喷射系统 结构简单,故障源 少,可采用较低的 喷油压力(只有 0.1MPa),成本低。
图2—2 单点喷射
返 回
间歇喷射
对每一个气缸的喷射都有一限制的喷射持续期,喷射是在进 气过程中的某段时间内进行的,喷射持续时间相应就是所控制的 喷油量。对于所有的缸内直接喷射系统和多数进气道喷射系统都 采用了间歇喷射的方式。间歇喷射由可细分为同时喷射、顺序喷 射和分组喷射。
喷油正时名词解释
喷油正时名词解释
喷油正时是一种汽车引擎技术,它基于发动机控制单元(ECU)对点火和供油系统的精确控制。
喷油正时涉及发动机控制单元接收传感器数据,并根据这些数据来计算最佳的点火时机和燃油喷射时机。
发动机控制单元会根据发动机负荷、转速和温度等因素,以及其他系统参数,来调整喷油正时。
通过精确控制喷油正时,发动机能够实现更高的燃油效率、更低的排放和更佳的性能。
这项技术在现代汽车中得到广泛应用,提供了更好的驾驶体验和更可持续的动力源。
认识电控燃油喷射系统
01 观察燃油供给系统的布置。 02 观察燃油供给系统主要部件及其安装位置。其主要部件包括燃油箱、电动燃油泵、 燃油滤清器、燃油压力调节器、燃油分配管和喷油器等。
认识电控燃油喷射系统>>> 实践操作
第三步 观察发动机ECU及其他传感器的位置
01 观察发动机ECU的位置。 02 观察其他传感器的位置。传感器主要包括发动机转速传感器、冷却液温度传感器和 氧传感器等。
认识电控燃油喷射系统>>> 项目测评
项目2测评表
认识电控燃油喷射系统>>> 知识拓展
一、汽油发动机缸内直喷技术
因节能和环保的要求日趋严格,汽油发动机即使采用多点燃油喷射(缸外喷射)技术也 不能满足要求,因此,世界各大汽车公司开发了更为精确的燃油喷射技术,即缸内直喷技术, 如大众的燃油分层喷射(fuel stratified injection,FSI)、奔驰的分层汽油直喷(stratifiedcharged gasoline injection,SGI)、宝马的高精度直喷(high precision injection,HPI)、 通用的火花点燃直接喷射(spark ignition direct injection,SIDI)、三菱的燃油直接喷射 (gasoline direct injection,GDI)等。
(1)压力型燃油喷射系统 (2)流量型燃油喷射系统
压力型燃油喷射系统
流量型燃油喷射系统
认识电控燃油喷射系统>>> 知识准备
三、燃油喷射控制
燃油喷射控制包括喷油正时控制、喷油量控制和断油控制等。
1.喷油正时控制
(1)同时喷油正时控制
电子喷射汽车启动故障分析
油 器 不 动 作 , 火 花 塞 不 跳 火 的现 象 。 用 听 诊 器 和 正 时 灯 进 行 检
查 ,便确 认 喷 油器 和 火花 塞 是 否 工 作 。
2) 、燃 油 泵 及 控 制 电 路 故 障
如 果 燃 油 泵 或 控 制 线 路 出现 故 障 ,也 会 造 成 供 油 系 统 没 有 燃
工 作 和 生 活 ,所 以探 讨 一 下 其 可 能 引起 的 故 障 原 因及 如 何 解 决 问题 的 方 法 。
[ 关键字 ] 电子喷射
前 言
随着我 国国民经济 的迅 速发展 ,对汽车 的技 术要求也 越来越
高 ,对 汽 车 的 废 气 排 放 和 噪 音 也 有 新 的 要 求 。 因 此 , 我 们 在 检 修 汽 车 的 过 程 中 ,不 能 忽 略 各 个 方 面 的 故 障 影 响 。
滤 网堵 塞致 使 油泵 不 能 足 量 吸 入 燃 油 和 燃油 滤 清 器 不 畅 通 引起 供 油
系统压力不足。
能 造 成 的 影 响 。知 道 可 以如 何 利 用 手 中 的工 具 更 好 的解 决 汽 车 启
动 困难 的 问 题 , 帮 助 我 们 在 诊 断 此 类 问 题 时 少 走 一 些 误 区 。
有些车 型中设有冷 启动喷油 器,在冷启动 时将 混合气加浓 以
改善冷 启 动性 能 。冷启 动 喷油 器 由启动 开关 和热 敏 时控 开关控 制 , 喷 油 持 续 时 间 取 决 于 热 敏 时控 开 关 加 热 线 圈 电 流 和 冷 却 水 的 温 度 。
( ) 一 、故障类型
通 进 气量 的调 节 。
2、 启 动 困 难 冷 启 动 困 难 和 热 启 动 困难 的 影 响 因 素 和 检 查 方 法 大 体 相 同 。 就 混 合 气 浓 度 而 言 ,有 混 合 气 过 稀 和 混 合 气 过 浓 两 种 情 况 。 影 响 供 油 的 故 障 可 能 出 现 在 燃 油 质 量 、燃 油 泵 、燃 油 滤 清 器 、 燃 油
电控燃油喷射系统的诊断与维修_毕业论文
德州职业技术学院毕业设计论文
1-空气 2-空气流量计
位置传感器
图 1-2 空气供给系统组成 3-节气门 4-怠速调整螺钉 5-旁通气道
6-怠速旁通阀
7-节气门
空气计量装置的分类
L 型空气计量装置:有翼片式、卡门旋涡式、热线式和热膜式。翼
片 式、卡门旋涡 式 空气流量 计属于体积流 量测量方式 ,可直接测 量空气
等组成;
节气门位置传感器:安装在节气门体上,用来测量节气门的开度;
怠 速控制阀 :控 制发动机暖机 时的快怠 速,加快暖机 过程 。发动机
正 常怠速 运 转 ,空气经怠 速旁通气 道进入进 气总管 ,在旁通 气道上安装
有怠速调整螺钉,其怠速运行是由 ECU 控制的。
1.1.2 空气供给系统的工作原理
[关键词] 电子燃油喷射 诊断 维修
1
德州职业技术学院毕业设计论文
引言
传统的化油器不能满足现代汽车对发动机高经济性、低污染的要 求。人们开始研究怎样同时解决汽车排气净化和节油的两大问题。
从 60 年代初开始,人们首先对点火系统进行改造,采用无触点电 子 点火装 置 。它 克服了传 统的 触点式点 火装置的 缺陷,提高了点 火能量 , 在 节油和 排 气净化方 面都有较大改 善 。但是,由于分 电器中的运动 部件 会 产生磨 损 ,一旦驱动 部件松旷就 会影响点火 正时 ,失去无 触点电子点 火 的优点 。而 且由于仍 采用 机械式点火 提前装置,不能实 现点火特性的 多维调节。
燃 油供给系 统的 作用 :根据发动 机各个工 况提供适 量的燃 油 ,并根 据 ECU 的指令完成燃油量的调节。
电 控 单 元 (ECU )的 作 用 :它 是 整 个 电 子 燃 油 喷 射 系 统 的 核 心 ,发 动 机 状态信息 通过 各种传感器收集后进 入电控单 元,经电控 单元处理后发 出相应的指令来控制执行元件动作。
柴油机电控燃油喷射技术
潍柴柴油机电控燃油喷射技术一、技术概述排气净化与节能是汽车产品急需解决的两大难题,现代车用柴油机工作压力高,燃烧充分,油耗比汽油机约低两成,排放物中除微粒物外均低于汽油机,因此在世界范围内应用不断扩大,除中重型商用车外,轻型车和轿车也越来越多地应用。
传统的柴油机存在着供油不精确的问题,解决的办法是采用电子控制燃油喷射的技术。
与汽油机相比,柴油机的电子控制燃油喷射系统有很多相同之处,在整机电脑管理方面两者基本相同,但因柴油机的喷射系统形式多样,电控系统的硬件也呈多样形式,同时柴油机需要对油量、定时、喷油压力、喷油路等多参数进行综合控制,其软件的难度也大于汽油机。
第一代柴油机电控燃油喷射系统也称位置控制系统,它用电子伺服机构代替调速器控制供油滑套位置以实现供油量的调整,这类技术已发展到了可以同时控制定时和预喷射的TICS 系统。
第二代系统也称时间控制系统,其特点是供油仍维持传统的脉动式柱塞泵油方式,但油量和定时的调节则由电脑控制的强力快速响应电磁阀的开闭时刻所决定。
第三代也称为直接数控系统,它完全脱开了传统的油泵分缸燃油供应方式,通过共轨压力和喷油压力/时间的综合控制,实现各种复杂的供油规路和特性。
强力快速线形响应电磁阀是各种系统共同的技术难点。
二、现状及国内外发展趋势因柴油机的喷射系统形式多样,国外柴油机的电控系统也形式多样,有直列泵和分配泵的可变预行程TICS 系统,有基于时间控制泵喷嘴系统,有蓄压共轨系统和高压共轨系统等。
各种技术方案都在原有的基础上发展,但高压共轨系统是总的发展方向。
根据国内到2007 年实行欧洲III号法规的进度要求,对主要国产喷油泵进行电控系统的开发,包括硬件和软件的开发,并尽快实现产业化,同时要专门组织力量,对主要在中、重型车上使用的高压共轨系统和在轻、轿车上使用的时间控制式VE 分配泵系统进行联合开发、攻关,到2008 年前后实现产业化。
三、柴油机基本知识柴油发动机与汽油发动机具有基本相同的结构,都有气缸体、气缸盖、活塞、气门、曲柄、曲轴、凸轮轴、飞轮等。
内燃机的低污染燃烧技术
内燃机的低污染燃烧技术随着现代社会的发展,汽车对于我们的生活质量、经济发展、环境保护等方面都有着重要的作用。
但是,汽车尾气排放对环境和人类的健康也带来了负面影响。
尾气排放中的氮氧化物、碳氢化合物等物质对空气质量带来极大的危害;车辆造成的噪音、震动也会对人们的身心健康带来不利的影响。
因此,对汽车实施低污染燃烧技术是现在推广的重点。
目前,最常见的燃油是汽油和柴油。
汽油发动机和柴油发动机是两种不同的内燃机。
虽然它们的燃烧工作方式和原理不同,但是实现低污染燃烧的技术有很多共通之处。
1.电控燃油喷射技术实现低污染燃烧的关键就是控制燃料进入燃烧室的量和时间,这需要精准的喷油控制。
自然吸气内燃机大部分使用的是汽化器,而现代汽车大部分都使用电控燃油喷射系统。
这种技术可以将燃油雾化得更细,使其更快地燃烧,从而降低尾气中的碳氢化合物、氮氧化物等污染物的排放量。
2.氧传感器氧传感器主要用于测量尾气中的氧气含量,可以帮助控制进气量和燃油注入量,以实现最佳的燃烧效果,降低污染物的排放。
在现代汽车中,氧传感器已经成为必备的部件。
3.可变气门正时技术可变气门正时技术主要是通过无级调节进气和排气气门的开启和关闭时间来实现最佳的燃烧效果。
当发动机需要高功率输出时,进气阀门的开启时间将会增加,以保证更多的燃油和空气进入燃烧室。
而进行低负荷行驶时,则需要减少进气阀门的开启时间,从而节省燃料。
4.中冷器和涡轮增压技术中冷器用于降温进入燃烧室的空气,以达到更好的燃烧效果和降低氮氧化物排放的作用。
涡轮增压技术则是通过压缩空气来提高引擎气缸内的压力,从而提高燃烧效率,减少燃料消耗,同时也减少污染物的排放。
总之,以上的技术都是用来控制燃油进入引擎中的量和时间,以实现最佳的燃烧效果和降低排放污染物的目的。
当然,除了以上的技术,还有其他技术也可以用于实现低污染燃烧,比如电动汽车、混合动力汽车等。
而对于普通的汽油车和柴油车来说,通过实现这些低污染燃烧技术,可以达到更好的节能环保目的。
《电控汽油喷射系统》课件
03
燃油喷射量控制的目标是确保 发动机在各种工况下都能获得 最佳的燃油经济性和动力性能 。
空燃比控制
空燃比是指发动机气缸内空气与燃油的质量比值,是影响发动机性能和排 放的重要参数。
电控汽油喷射系统通过空燃比传感器实时监测发动机的空燃比,并根据发 动机工况和驾驶员需求进行调节。
空燃比控制的目的是使发动机在各种工况下都能保持最佳的空燃比,以提 高燃油经济性、动力性能和排放性能。
2
多点燃油喷射控制通过精确控制每次燃油喷射的 时间和量来实现,以适应不同转速和负荷下的发 动机工况。
3
多点燃油喷射控制的目的是提高发动机的燃油经 济性和动力性能,并降低排放污染。
04
电控汽油喷射系统故障诊断与维修
故障诊断方法
直观检查
通过观察汽油喷射系统的外观和仪表盘, 检查是否有明显的故障迹象。
工作原理
根据测量空气流量的方式不同, 可分为叶片式、卡门涡旋式、热 线式和热膜式等。
特点
空气流量计是电控汽油喷射系统 中最重要的传感器之一,其性能 直接影响发动机的燃油喷射控制 精度。
喷油器
作用
将燃油喷射到进气歧管或气缸内,形成雾化燃油,与空气混合形成 可燃混合气。
工作原理
在发动机控制系统的指令下,喷油器电磁阀通电或断电,控制喷油 器针阀的开启和关闭,实现燃油喷射。
《电控汽油喷射系统》PPT课 件
CONTENTS
• 电控汽油喷射系统概述 • 电控汽油喷射系统部件 • 电控汽油喷射系统控制策略 • 电控汽油喷射系统故障诊断与
维修 • 电控汽油喷射系统案例分析
01
电控汽油喷射系统概述
定义与工作原理
定义
电控汽油喷射系统是一种利用电子控制技术,精确控制汽油喷射过程的汽车发动机技术 。
电控燃油喷射系统的诊断与维修_毕业论文
毕业(设计)论文系(部)汽车工程系专业汽车检测与维修班级 2009级汽车检测与维修三班指导教师莉姓名吴宏远学号0105电控燃油喷射系统的诊断与维修【摘要】从60年代后半期开始,随着半导体技术的高速发展,尤其是微型计算机的出现导致电控燃油喷射系统的产生,使汽车发动机进入一个电子控制的新时代。
电控燃油喷射系统(Electronic fuel injection简称EFI)就是用计算机控制燃油供应量的装置。
电控燃油喷射系统中的计算机综合各种不同传感器送来的信息作出判断,控制喷油器以一定的压力,正确迅速地把燃油喷射到发动机进气歧管里,与吸入的空气混合后,进入发动机气缸,配合电于控制点火在最佳时刻点燃可燃混合气。
电子燃油喷射(Electronic Fuel Injection)系统,是用电子控制器(ECU)控制燃油喷射代替传统化油器的系统,简称为EFI系统。
电控燃油喷射发动机的控制原则是以电控单元为控制核心,以空气流量和发动机转速为控制基础,以喷油器和点火时刻为控制对象,使发动机在各种工况下都能得到与工况相匹配的最佳空燃比和最佳点火时刻。
显然,电控燃油喷射系统能实现空燃比和点火的高精度控制。
现代电控汽油喷射系统采用闭环控制的供油特性,在电控汽油喷射系统的控制过程中,有结果参与的反馈控制,这使得电控燃油喷射系统的发动机功率得到了较大的提高,降低燃料消耗,使废气排放量减少到了最低。
本文主要介绍了电控燃油喷射系统常见故障的现象、故障原因、解决方法,电控汽油喷射系统的组成和工作原理,电控燃油喷射系统故障诊断,电控燃油喷射系统维修实例,电控发动机启动困难分析等。
电控燃油喷射系统对电控汽车起着关键性的作用,ECU通过对燃油喷射系统的控制,不断的调节喷油量使其达到最佳的空燃比。
电控燃油喷射系统故障主要分为:供油系统故障、点火高压电路故障、其他机械故障等。
【关键词】电子燃油喷射系统维修诊断【目录】第一章绪论11.1本课题的研究现状11.2本课题的研究容11.3本课题的研究意义1第二章电控汽油喷射系统的组成和工作原理22.1空气供给系统的组成和工作原理32.2燃油供给系统的组成和工作原理42.3电控系统的组成和工作原理5第三章电控燃油喷射系统故障诊断63.1检测诊断及维修电控汽油喷射系统注意事项63.2基本的诊断方法63.3电子控制燃油喷射系统的常见故障73.4几种最常见故障的诊断程序8第四章电控发动机典型故障分析94.1电喷车启动困难分析94.2不能启动94.3启动困难104.4电喷发动机熄火故障浅析114.5维修实例12第五章总结15参考文献16致17第一章绪论1.1本课题的研究现状传统的化油器不能满足现代汽车对发动机高经济性、低污染的要求。
2024年汽车电子燃油喷射系统的诊断与维修(3篇)
2024年汽车电子燃油喷射系统的诊断与维修随着汽车科技的不断进步和发展,汽车的电子控制系统已成为汽车的重要组成部分。
其中,燃油喷射系统是引擎工作和燃料供应的核心部件。
燃油喷射系统的诊断与维修尤为重要,它关系到汽车的性能、经济性和排放。
2024年的汽车电子燃油喷射系统诊断与维修将进一步发展,以下是一些可能发生的变化和趋势。
首先,诊断技术方面。
2024年,汽车电子燃油喷射系统的诊断将更加智能化和高效化。
通过先进的传感器和计算机技术,诊断仪可以详细分析和记录各种参数,并给出准确的故障诊断结果。
诊断结果将更加精确和可靠,帮助技师迅速找到故障点,并针对性地进行维修。
其次,维修技术方面。
2024年,维修技师需要对汽车电子燃油喷射系统有更深入的了解,并学习适应新的系统和技术。
维修工具将更加智能化和多功能化,使维修更加便捷和高效。
同时,维修技师需要学习掌握新的维修方法和技巧,例如使用激光测量仪器来调整喷油器的喷射角度,以提高燃油喷射系统的效率和性能。
再次,故障预防方面。
2024年,汽车制造商将更加注重汽车电子燃油喷射系统的可靠性和耐用性,减少故障的发生。
同时,车辆将配备更先进的自我诊断系统,及时检测和报告系统的异常情况。
这将减少故障的发生,并提供更迅速和准确的故障诊断结果,减少维修时间和成本。
最后,环保方面。
2024年,汽车电子燃油喷射系统的维修将更加注重环保性能。
维修技师需要熟悉并应用最新的排放标准和监测技术,保证汽车的排放达到国家和地区的要求。
此外,维修技师还需要学习和应用清洁燃料和节能技术,以减少汽车对环境的污染,促进可持续发展。
总结起来,2024年的汽车电子燃油喷射系统的诊断与维修将变得更加智能化、高效化和环保化。
技术的发展将带来更精确和可靠的故障诊断结果,维修将更加便捷和高效。
同时,维修技师需要不断学习和适应新的技术和系统,保持自身的专业能力和竞争力。
汽车电子燃油喷射系统的诊断与维修的发展,将为汽车行业的可持续发展和环保治理做出重要贡献。
燃油喷射系统优化及喷油正时对柴油机性能的影响
32福建冶金2021年第3期燃油喷射系统优化及喷油正时对柴油机性能的影响赖建伟(福建省三钢(集团)有限责任公司,福建三明365000)【摘要】本文对GK1F型内燃机车Z12V190柴油机燃油喷射系统进行仿真优化,得出了最佳结构参数组合:0.24mm-14.0mm-0.46mm/益A-950mm(喷孔直径-柱塞直径-凸轮型线速度-油管长度),优化后喷油压力提高70%,将优化后的参数导入燃烧室仿真模型,分析不同喷油正时对柴油机的影响,得到最佳喷油正时39.53益A。
【关键词】柴油机燃油喷射系统参数优化正交试验设计喷油正时The Optimization of Fuel Injection System and the Influence of Fuel InjectionTiming for Diesel Engine PerformanceLai Jianwei(Fujian SanStee(l Group)Co.,Ltd.,Sanming365000,Fujian)[Abstract]The fuel injection system of GK1F diesel locomotive Z12V190diesel engine is simulated and optimized in this paper,and the best structural parameter combination is obtained:0.24mm-14.0mm-0.46mm/益A-950mm(Injection hole diameter-Plunger diameter-Cam linear velocity-Oil pipe length).The fuel injection pressure is increased by70%after optimization.The optimized parameters are imported into the combustion chamber simulation model to analyze the influence of different fuel injection timings for the diesel engine and the best fuel injection timing is39.53益A.[Keywords]diesel engine;fuel injection system;parameter optimization;orthogonal experimental design;fuel injection timing-U_1—刖言面对能源紧缺、环境恶化和进一步提高的排放标准,节能减排成了企业研究的重点。
电子燃油喷射技术2正时分析[1]
![电子燃油喷射技术2正时分析[1]](https://img.taocdn.com/s3/m/15397e51f8c75fbfc77db2e1.png)
电子燃油喷射技术2正时分析[1]
PPT文档演模板
电子燃油喷射技术2正时分析[1]
PPT文档演模板
电子燃油喷射技术2正时分析[1]
档演模板
电子燃油喷射技术2正时分析[1]
PPT文档演模板
电子燃油喷射技术2正时分析[1]
PPT文档演模板
电子燃油喷射技术2正时分析[1]
曲轴转速、位置信号
PPT文档演模板
电子燃油喷射技术2正时分析[1]
3rew
演讲完毕,谢谢听讲!
再见,see you again
PPT文档演模板
2020/11/28
电子燃油喷射技术2正时分析[1]
§ 通常情况下,汽车都有配对的信号齿轮,ECU可以 从同步信号判断下一个到达上止点的是哪一个缸, 并能判断出它是处在压缩还是排气行程。与曲轴转 速、位置信号配合使用,用来控制点火时刻和喷油 时刻的调整。桑塔纳2000AJR型电喷发动机采用的 同步信号传感器信号轮如图2-5所示:
PPT文档演模板
电子燃油喷射技术2正时分析[1]
§ 对于不同的信号齿轮,传感器会有不同的信 号输出,桑塔纳2000AJR型电喷发动机采用 的曲轴转速、位置传感器信号轮示意图如图 2-3(有8个齿槽,分2组布置)所示:
PPT文档演模板
电子燃油喷射技术2正时分析[1]
PPT文档演模板
电子燃油喷射技术2正时分析[1]
同步信号
§ 同步信号是由安装在凸轮轴(由曲轴通过齿轮驱动, 直接控制进气门、排气门的开关,凸轮轴转动360 度,曲轴则转动720度,每个气缸完成一个工作循 环)上的的同步信号传感器(齿轮触发型霍尔效应 传感器)实时检测获得。
电子燃油喷射技术2正时 分析
PPT文档演模板
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.3喷油正时
喷油量控制和适时点火是发动机电控的主耍部分,但是喷油正时也是其不可少的一部分°
在M佳时刻喷油对于混合气的形成十分有利,它对提高燃油经济性和降低有害物质排放等都有一左的好处•当然T只有采用顺序喷射的系统才能进行喷油正时控制。
下而以四缸顺序喷射系统为例y ||||轴每转两圈y每缸都轮流喷射一次》且像点火系一样按照特逗的顺序依次进行喷射.控制器输出四个信号分别控制四个喷油嘴工作。
气缸有四个工作行程——进气、压缩、做功和排气,火花塞点火是在圧缩行程中活塞到达上止点前(即点火提前角)进行的,喷油_定要在点火前完成,因此喷油必须在前一行程(进气行程)或更早的排气行程中完成。
因为汽油喷射后形成均匀可燃混合气还需要一段时间,所以实验证明在排气行程屮活塞到达上止点前(也有一个提前角)喷油为最佳.ECU通过曲轴位置传感器的信号可以知道活塞在上止点位置,再通过霍尔信号来判断第1缸'然后从第1缸开始顺序正时喷射。
由于曲轴位置信号采用主控芯片的捕获单元。
当捕获单元被使能后,输入引脚
上的跳变将使所选择的通用定时器的计数值装入到相应的FIFO堆栈,同时如果有—个或多个有效的捕获值存入到Fffom 将会使相应的中断标志位置位。
每次捕获到新的计数值存入到FIFO堆栈时,捕获FIFO状态寄存器CAPFEFOx相应的位就进行调整,实时地反映FIFO堆栈的状态。
冃冃_ ―一fl II
J
T J r T 2 T 3|
Fig 3-26 big space finding principle
•图3・26齿缺判断原理
图3-26为曲轴位置传感器输出波形经过322节中提到的曲轴位置传感器调理电路,处理之后的标
准脉冲。
通过以上所述的生控系统脉冲捕获方法,在处理之后
脉冲信号的每个下降沿都会产生有效的捕获的定时器计数值。
而每相邻两个计算值之差就反映了一个脉冲周期。
图中Tl、T2. T3三个周期分别为曲轴位置传感器上
大齿缺,及其前后两个小齿缺对应的脉冲周期。
当12大于出倍T1和T2大于2 倍T3同时得到满足时,T2所代表的大齿缺即被检测到。
随后,通过程序处理将大惰M洛药冬离讲的始g垢1至II唸.
图4-2第0号齿檢测程序流程图
于计算转速。
程序中所指的转速实际上是发动机曲轴旋转一周的平均转速,根据两次检测到第0号齿之间的时间间隔TREF计算得到’计算公式如下:
RPM=(60 X1000X1000)/(TREF X DT)(4-1)
由于本文所讨论的天然气发动机喷气方式为多点同时喷射,并不对每个缸进行最
佳燃气喷射量控制。
通过设定EV事件管理器中的TIMER 2时钟进行喷气脉宽控制。
需要说明的是,在曲轴位置传感器输出信号,通过判断找到同步之后,再根据转速和目标总燃气喷射量确定喷气定时的触发齿(此过程在后台功能中实现),当曲轴位置至哒触发齿时,这时就会同时启动喷气阀开始喷气同时启动TIMER2 时钟,当TIMER2时钟中断发生时,喷气阀也被关闭,利用这种方法实现了喷气脉密捽制亡
「诊动朮工作时,EOJ根据发动机节气门开度转角和发动机转速,从存储的数据中找到相应的基本点火提前角.再根据有关传感器信号值加以修正(本文中主要
进行水温修正),得出实际点火提前角。
而对于初级线圈的通电时间控制,通过预先设定的基于点火提前角和通电时间的点火通电触发齿MAP,进行查表来控制。
当曲轴位置传感器输出信号,通过判断找到同步之后.在根据采用分组点火方式. 查得1、4缸点火通电触发齿和相对于此触发齿的点火提前角的TIMER4计数值(此启动T1MER4,蛍TIMER4时钟中断发生时•点火线圈初级线圈跳火亍实现点火通电时间和点火提前角控
制’之后,进行2、3缸点火控制’处理过程同〕.4缸处理工程。
过程在后台功能中实现),当曲轴位置到达触发齿时, 使点火初级线
Fig 3-27 cap
int.process
图3-27捕获中断流程
图4-6 护|土“言号征理电路
Fig-4-6 handling circuit of judging cylinder si.g.n*il
计算空气质量流量:
|・空气质量流量法
2.速度-密度法
确定空燃比的
二二务种传感器信号
校正量
转速-*计算毎缸每循环充气屋
计算毎缸每循坏啖油毎
计算喷油脉宽
计算喷油时刻曲轴角信号
凸轮轴信号
0 3-2喷油脉宽的计算过程
Fig.3-2 Calculation process of injection pulse
电控甲元利用安装在曲轴和凸轮轴上的齿盘和转速传感器(霍尔或者电磁). 发出的转速信号进行位置正时,具体的正吋策略取决于曲轴和凸轮轴齿盘的形■ 式。
通常曲轴上的齿盘通常采用缺齿的
形式,齿数较多,以便更加精确的判定■曲轴位置。
凸轮轴上的齿盘齿数较少,通常有两种结构形式:-种是齿盘上只童有个齿,在第一缸上止点前(通常为7亍BTDC)发出信号,用来判定第一1 缸;另外一种采用N+1齿的多齿形式,N为发动机缸号,除了判定第一缸外,I 还町以在其他各缸到达压缩冲程上止点前发出信号。
由于发动机需要在曲轴传1 感器损坏的情况下保持正常工作,现在凸轮轴转速信号齿盘多采用多齿形式。
I
转速信号的波形取决于齿盘的形状。
在论文系统中采用的转速信号齿盘形式 为曲轴齿盘(60-
2)齿,凸轮轴齿盘(6+1)齿。
|§| 4-9是木系统中发动机曲轴转速信 号(±)
TDC-4
7 x 6^ (cranlO
(typical)
FL
6^1 cam tArg&t
图4-9曲轴和凸轮轴的正时关系
两个齿轮在曲轴和凸轮轴上的安装必须满足下面两个条件:检测到凸轮轴齿 盘的多齿位置在曲轴缺齿后55© (曲轴度数);机械安装结构上要保证安装位置 误差不能大于3 ° (曲轴角度)。
在系统中,用落在曲轴同步窗口内的凸轮轴齿 轮上的多齿来判定第 缸,即开启曲轴同步窗口之后,如果凸轮刚好在此时间 内出现,表明发动机处于第•缸上止点前。
发动机位置用曲轴述|逆變比辱 表示,计数范围为1~120,曲轴缺齿之后的第-个齿计数为1;发动机位置让数
为I 11灿肉•缸l :ll 乂的位胃为60。
(刈庇6缸机系统),ECU 根据此前确怎的 笈劲机「况条fT •利I 略估V/J.1L 仃X 【吋亡火上I 的山火I';厂用・提而阳W 紬发位代实诞 点火。
再根据发动机的点火顺丿「1$3・
624).确宦卜••个需妥燃气喷射缸的
和凸轮轴转速信号(下)的波形。
TDC1
TOC5
TDC?
TOC 2
…—…_ 1
60 =■
S1
6 x 120f
TDC6
60-2 Crankshaft
tone wheel
2 Missing J pul ses
■■对于不同的信号齿轮,传感器会有不同的信号输岀,桑塔纳2000AJR型电喷发动机采用的曲轴转速、位置传感器信号轮示意图如图2-3 (有8个齿槽,分2组布置)所示:
相对应的Illi轴转速.位置信号波形及物理意义见图2/所示:
■同步信号是由安装在凸轮轴(由曲轴通过齿轮驱动,道接控制进气门、排气门的开关,凸轮轴转动360 度,曲轴则转动720度,每个气缸完成一个工作循环)上的的同步信号传感器(齿轮触发型霍尔效应传感器)实时检测获得。
―一―
■通常情况下,汽车都有配对的信号齿轮,ECU可以从同步信号判断下一个到达上止点的是哪一个缸,并能判断岀它是处在压缩还是排竺行程。
与曲轴转一一速、位置信号配合使用,用来控制点火时刻和喷油时刻的调整。
桑塔纳2000AJR型电喷发动机采用的同步信号传感器信号轮如图2-5所示:
j P f
IF- I-. •
180".
、工 丿1 * b 小” 7八
1RO"
5V
0V ——
相对应的同步信号波形及物理恿义如图2 -6所/j< ?
26(? •曲渤験72DJ 卷缸炯壯1次
h 斗価将到上止点性置
l->tW 程; 4->压晰程;
4->排气行程;。