UWB radar antenna
uwb 单位000 射频电路 解读

UWB射频电路解读UWB(Ultra Wide Band)是指超宽带技术,它是一种能够在较宽频带范围内传输信息的无线通信技术。
UWB技术的发展,为无线通信领域带来了颠覆性的革新,广泛应用于雷达、无线传感器网络、医疗设备、汽车电子、室内定位导航等领域。
在UWB技术的背后,射频电路起着至关重要的作用,它是UWB信号调制解调、传输和接收的核心部分。
本文将从UWB技术的基本概念出发,深入解读UWB射频电路的原理、特点和应用。
1. UWB技术概览UWB技术是指信号带宽占用超过20%的无线通信技术,能够实现高速数据传输和精准定位。
UWB技术的特点是具有极高的频率利用率、抗干扰能力强、穿透障碍物能力强等。
在UWB通信系统中,射频电路是实现UWB信号发射和接收的重要组成部分。
2. UWB射频电路的原理UWB射频电路主要包括UWB信号的发射和接收两个部分。
在UWB信号的发射端,射频源产生宽带信号,并经过功率放大和滤波等环节,将信号发射至空中。
在UWB信号的接收端,射频电路接收到空中传来的UWB信号,并经过信号放大、滤波、解调等处理,最终将信号还原为原始信息。
3. UWB射频电路的特点UWB射频电路的特点主要体现在以下几个方面:a. 宽带性能:UWB射频电路需要支持带宽大、中心频率低的特点,能够满足UWB信号的传输要求。
b. 抗干扰能力:UWB射频电路需要具备强大的抗干扰能力,能够在复杂的信道环境下保持通信质量稳定。
c. 低功耗:UWB射频电路需要在实现高性能的尽可能降低功耗,以满足无线通信设备对电能的要求。
4. UWB射频电路的应用UWB射频电路广泛应用于各种UWB通信系统中,如室内定位、无线传感器网络、雷达测距、车联网等领域。
其中,UWB室内定位系统能够实现室内精确定位,为室内导航、物联网等应用提供了技术支持;UWB雷达系统能够实现高精度的距离测量和目标识别,被广泛应用于军事、民用测绘等领域。
总结回顾本文从UWB技术的概念出发,深入解读了UWB射频电路的原理、特点和应用。
UWB超宽带

UWB超宽带什么是UWB超宽带?UWB(Ultra-WideBand)超宽带是一种通过在超宽频带范围内传输数据的无线通信技术。
它基于短脉冲信号,能够在极短的时间内传输大量数据。
UWB超宽带技术在无线通信领域具有广泛应用,包括室内定位、物体追踪、雷达和无线传感器网络等。
UWB超宽带的特点1.宽频带范围: UWB超宽带技术的一项主要特点是其宽频带范围。
通常,UWB的频带范围从几百兆赫兹(MHz)到几千兆赫兹(GHz),因此能够支持高速数据传输和较长的传输距离。
2.低功率: UWB超宽带技术在传输数据时使用低功率,这使得它可以在不干扰其他无线设备的情况下工作。
3.高精度定位: UWB超宽带技术可以实现高精度的室内定位。
由于UWB信号能够穿透墙壁和障碍物,因此可以在室内环境中实现准确的物体定位。
4.抗多径干扰:多径干扰是指由于信号在传播过程中碰撞、反射和折射等原因导致信号传输路径的多样性。
UWB超宽带技术通过使用信号的多径特性来抵消多径干扰,提高信号传输的可靠性。
UWB超宽带的应用1. 室内定位UWB超宽带技术在室内定位方面具有特殊优势。
通过将UWB设备部署在建筑物内部,可以实现对人员和物体的高精度定位。
这在商场、医院和仓库等场所可以提供实时的位置信息,便于管理和安全监控。
2. 物体追踪利用UWB超宽带技术,可以实现对物体的追踪。
通过将UWB标签附着在物体上,可以准确追踪其位置和运动轨迹。
这在物流管理、仓库管理和供应链领域具有广泛应用。
3. 雷达应用UWB超宽带技术在雷达领域也得到了广泛应用。
与传统雷达相比,UWB雷达具有更高的分辨率和更好的目标检测能力。
它可以在不同的天气和环境条件下提供高质量的目标识别和跟踪。
4. 无线传感器网络UWB超宽带技术在无线传感器网络中起到重要作用。
通过使用UWB传感器,可以实现对环境参数(如温度、湿度和压力等)进行高精度和实时的测量。
这在工业自动化、环境监测和智能家居等领域有着广泛的应用前景。
UWB的名词解释

UWB的名词解释无线超宽带(Ultra-Wideband,简称UWB)是一种现代通信技术,通过发送短脉冲信号来传输数据。
这种技术使用了宽带频谱,以更高的速率传输信息,其主要特点是信号的带宽远远超过传统无线通信技术。
传统的无线通信技术一般采用单一频带传输数据,而UWB则在较大的频谱范围内传输数据,这使得UWB具有很强的抗干扰能力。
由于UWB信号的短暂性质,它几乎不会与其他无线设备发生冲突,从而能够在复杂的无线环境中工作。
UWB技术的广泛应用领域之一是室内定位。
传统的室内定位技术往往需要在建筑物内放置大量基站,这对于成本和布局来说都是具有挑战性的。
而UWB可以在室内通过对信号传播的时间、相位和强度的测量,实现高精度的定位,不仅可以用于室内导航,还可以用于安全监控和物品追踪等领域。
此外,UWB还广泛应用于雷达系统中。
传统雷达系统一般使用脉冲信号来探测目标并测量其距离,但在这种技术中,多个目标的重叠距离难以精确测量。
而UWB雷达在测量目标之间的距离时,可以通过测量信号传播的时间差来实现高精度的距离测量。
除了室内定位和雷达系统,UWB还可以用于短距离通信。
由于UWB信号的高速率和低功率特性,它可以用于短距离高速数据传输。
这不仅在个人消费电子设备中有应用前景,也在无线传感器网络和工业自动化等领域具有潜力。
然而,尽管UWB在多个领域都显示出巨大的潜力,但目前其广泛应用仍面临着一些挑战。
首先,由于UWB技术属于新兴技术,其标准化和认证仍在进行中。
这使得不同厂商的产品可能并不兼容,限制了UWB技术的普及和应用。
其次,UWB技术的高频段使用可能会干扰其他无线设备,因此需要对频谱资源进行合理的规划和管理。
这需要制定相关的法规和标准来确保不同无线设备之间的和谐共存。
最后,UWB技术在室外环境中没有明显优势,因为其高速率和高精度的特性在较远距离下可能无法有效利用。
因此,在选择使用UWB技术时,需要综合考虑其性能和应用场景的匹配程度。
uwb antenna新型超宽带天线
#
Department of Broadcasting Eng. Radio wave and propagation Department, IRIB University * Iran Telecommunication Research center Tehran, Iran.
1
razavizadeh@iribu.ir 2 fallahi@itrc.ac.ir
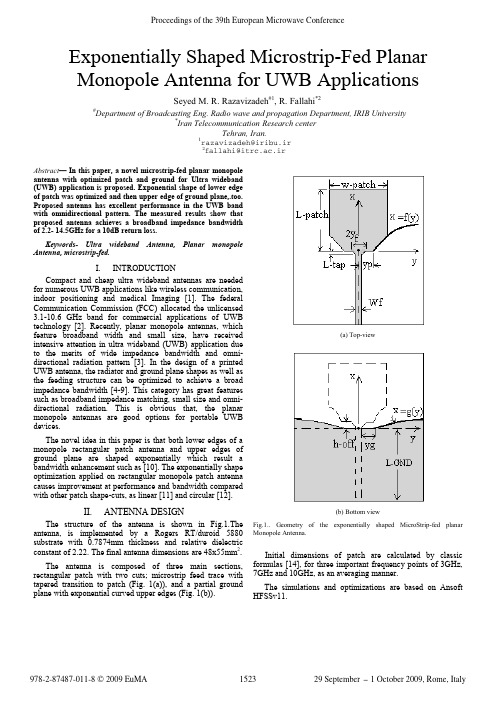
Initial dimensions of patch are calculated by classic formulas [14], for three important frequency points of 3GHz, 7GHz and 10GHz, as an averaging manner. The simulations and optimizations are based on Ansoft HFSSv11.
Abstract— In this paper, a novel microstrip-fed planar monopole antenna with optimized patch and ground for Ultra wideband (UWB) application is proposed. Exponential shape of lower edge of patch was optimized and then upper edge of ground plane,.too. Proposed antenna has excellent performance in the UWB band with omnidirectional pattern. The measured results show that proposed antenna achieves a broadband impedance bandwidth of 2.2- 14.5GHz for a 10dB return loss. Keywords- Ultra wideband Antenna, microstrip-fed. Antenna, Planar monopole
uwb技术的应用领域

uwb技术的应用领域UWB技术(Ultra-Wideband)主要指用于无线通信的一种无线电技术。
它是一种通过瞬时调频来产生短脉冲的无线电技术,这些脉冲的宽度非常短,只有数纳秒。
UWB技术广泛应用于传感、定位、通信、雷达等领域。
下面将分别介绍UWB技术在不同应用领域的应用情况。
1.传感领域在传感领域,UWB技术主要应用于测距和物体识别。
其中,UWB测距利用UWB超短脉冲传输,通过测距时隙数计算距离。
UWB测距技术最大的优点是测量精度高,目前可达到10cm级别。
UWB物体识别则利用UWB信号的频谱特性,通过分析多径传播信号,识别并区分不同对象的属性。
UWB物体识别技术可广泛应用于智能交通、智能安防等领域。
2.定位领域UWB技术在定位领域的应用主要有室内定位、智能交通及智能物流定位等。
UWB室内定位利用UWB超短脉冲特性,通过测距原理计算出根据基站定位标签,然后确定标签位置,实现室内定位。
室内定位目前是UWB技术应用的主要领域,可广泛运用于室内导航、智能交通、智能安防等领域。
UWB智能交通定位则利用UWB进行车辆/行人定位,实现精准的交通管制、调度和预警;UWB智能物流则利用UWB进行物品位置的精确定位,实现物品流程的精益化管理。
3.通信领域UWB技术在通信领域主要应用于宽带数据传输和室内移动通信。
UWB通信是一种低功率、高宽带技术,可达到很高的传输速率。
UWB技术在室内通信方面则可应用于户内通信,如在住宅、写字楼等复杂室内场景下,可利用UWB技术实现高速无线局域网,解决了由于墙体、玻璃等环境因素导致室内信号传输的难题。
4.雷达领域UWB技术在雷达领域应用较为普遍。
UWB雷达利用UWB脉冲信号的特性,实现了细小目标的探测和高精度测距。
它具备信息带宽宽、可控范围狭窄等特点,能够在高杂波环境下实现抗干扰、高精度的目标探测。
UWB雷达技术可应用于军事情报获取、安全监控、车辆安全防范等方面。
总之,UWB技术以其高精度、高宽带、低干扰等优点,在传感、定位、通信和雷达等领域都得到了广泛应用,为各行各业提供了更加精准、高效、智能的解决方案。
UWB技术应用介绍

UWB技术应用介绍UWB技术(Ultra-Wideband)是一种具有超宽带特性的无线通信技术,其频率范围非常广泛,一般包括从几百兆赫兹到数千兆赫兹,甚至数十千兆赫兹的频段。
相比传统无线通信技术,UWB技术具有更高的数据传输速率,更低的功耗以及更广泛的应用领域。
在UWB技术的应用中,最重要的是其高速数据传输能力。
由于UWB技术的频率范围广泛,因此可以提供更高的传输带宽,一般能够达到数千兆比特每秒的传输速率。
这种超高速传输能力使得UWB技术在实时高清视频传输、无线VR/AR应用以及大规模数据传输等领域有着广泛的应用前景。
第二个重要的应用领域是室内定位和跟踪。
UWB技术可以实现非常精确的距离测量,其测距精度一般可达到几乎厘米级别。
这使得UWB技术能够在室内环境中实现高精度的定位和跟踪,例如在仓库管理、智能家居以及智能医疗设备中应用。
此外,UWB技术还可以实现室内环境中的人员密度检测和人员流量管理等功能。
UWB技术还可以实现无线电频谱的共享和利用。
由于UWB技术的频率范围非常广泛且无需占用特定频段,因此可以有效利用频谱资源,避免不同无线设备之间的干扰。
与传统的频谱共享技术相比,UWB技术可以实现更高的频谱利用效率。
这使得UWB技术在军事应用、无人驾驶以及物联网等领域有着广泛的应用前景。
总结起来,UWB技术是一种具有超宽带特性的无线通信技术,具有高速数据传输能力、精确定位和跟踪能力以及频谱共享和利用能力。
应用领域包括高清视频传输、室内定位和跟踪、雷达和无线通信、无线电频谱共享和利用等。
随着技术的进一步发展,UWB技术有望在更多领域得到广泛应用。
超宽带雷达(UWB)芯片的研究现状与发展

超宽带 ( UWB ) 系统具有高传输速率、低功耗、探测精度高、穿透性强、安全性高等优势,在军事、雷达、生物探测、短距通信及室内室外高精度定位等场景有着广泛的应用。
并且随着半导体技术的发展,基于 CMOS 的 UWB 雷达芯片成为研究热点。
国内外众多学者及商业公司提出各具优势的 UWB 芯片及系统。
来自西安电子科技大学与军事科学院的研究团队在《电子与信息学报》发表最新文章,从UWB 系统、UWB 芯片架构中关键电路和关键技术的研究现状和发展进行综述。
什么是超宽带雷达(UWB)20 世纪 60 年代超宽带 ( Ultra-Wide Band,UWB ) 的构想首次在 "time-domain electromagnetics" 中被提出,采用一种无载波的窄脉冲信号进行通信。
由于其具有较好的安全性,高传输速率以及高距离分辨率,使其在军事及雷达等领域有着重要的应用价值。
2002 年 2 月,美国联邦通信委员会(Federal Communications Commission,FCC)正式批准超宽带民用,规定超宽带的工作频率为 3.1~10.6 GHz,发射带宽大于 500 MHz,但为了防止超宽带与其他通信带宽产生干扰,对发射机发射功率进行了限制,即有效全向辐射功率小于– 41.2 dBm/MHz。
因此超宽带技术的高速传输速率是以非常宽的带宽为代价,同时超宽带脉冲雷达技术是发射机发射持续时间极短的脉冲信号,而收发机的重频周期较长,因此单位时间内消耗的功耗极低,适合今后低功耗的应用场景要求。
UWB 系统在军事雷达领域应用之外,在生物探测、室内定位等商业应用场景的得到重要的应用。
图 1 展示的是 UWB 系统的优势和应用场景。
图 1 UWB 系统的优势与应用场景UWB 雷达芯片中的关键技术UWB 雷达芯片关键技术主要包括了信号产生技术、超宽带功率放大器、超宽带低噪声放大器、高速量化技术等。
UWB雷达信号处理与目标检测技术研究
UWB雷达信号处理与目标检测技术研究近年来,随着技术的不断发展,UWB(Ultra Wide Band,超宽带)雷达成为了目标检测领域中备受关注的技术。
其独特的信号处理与目标检测技术为人们提供了广阔的应用前景。
本文将围绕UWB雷达信号处理与目标检测技术展开讨论,介绍其原理、应用以及研究现状。
首先,我们来了解UWB雷达的信号处理原理。
UWB雷达利用超宽带的信号特性,能够在极短的时间内发射并接收到宽带信号。
其信号的波形具有多径冲击响应(MUI)的特点,这使得UWB雷达在目标检测方面具有独特的优势。
信号的处理过程主要包括调制解调、滤波、脉冲压缩等步骤。
通过对收到的信号进行处理,可以提取出目标的信息特征,从而实现目标的检测与定位。
在UWB雷达的目标检测中,重要的技术之一是目标的距离测量。
UWB雷达可以通过测量超短脉冲的传播时间来计算目标与雷达之间的距离。
这种距离测量的精度非常高,可以达到亚毫米的级别,适用于很多领域,如安全监控、车辆定位等。
此外,UWB雷达还可以利用多径效应来实现目标的成像,提供目标的形状和轮廓信息,进一步提高目标检测的准确性。
然而,UWB雷达目标检测仍然存在一些挑战和难题。
其中之一是在多目标环境下的目标分离与跟踪。
由于UWB雷达发射的脉冲具有超宽带特性,容易发生多径干扰,导致目标之间的距离测量和成像出现误差。
为了解决这个问题,研究人员提出了许多算法和方法,如基于时频分析的目标分离算法、基于自适应滤波的目标跟踪算法等。
这些方法通过优化信号处理过程,减小多路径干扰对目标检测的影响,提高了目标检测的精确度和可靠性。
此外,UWB雷达还可以结合其他传感器进行多模态信息融合,进一步提高目标检测的性能。
例如,可以将UWB雷达与摄像头、红外传感器等相结合,利用不同传感器的优势来实现更加准确、鲁棒的目标检测。
通过融合多种传感器所得到的数据,可以得到更加全面、丰富的目标信息,帮助用户更好地理解和分析目标。
UWB简介及其定位方法
UWB简介及其定位方法1前言本文阐述有关UWB的简介及其定位的方案,定位方法介绍了TOA、AOA/DOA、TDOA、RSSI这几种定位方法。
2概述随着现在无线技术的发展,无线室内定位技术也得到了飞速的发展,现在常用的室内无线定位技术就有很多种,包括了基于WiFi的定位、蓝牙定位、小基站定位、LED可见光定位、超宽带定位、RFID、惯性导航、地磁定位、伪卫星等多种室内定位技术。
其中的超宽带定位技术是一种特别适合于应用在室内的定位技术,超宽带定位技术具有定位精度高(1~15cm)、抗干扰能力强、分辨率高、低功耗等优点。
表1 各种无线定位技术的对比超宽带(UWB)技术在军用和民用场景都有很多应用,并且具有光明的前景。
UWB技术的应用场景大致可以分为三个方面,分别是通信、雷达和定位,UWB技术科应用于智能家庭、无线网络、战术组网电台、探地雷达、车辆避撞雷达以及军用民用需要精确定位的系统中。
目前,市场是已经出现了基于UWB达到室内定位装置。
例如:英国的Ubisense公司推出了将TDOA和AOA相结合的室内定位系统,测距范围达到50-100m,精度可达15cm。
美国的Zebra公司推出了Dart UWB系统,该系统建立在Sapphire DART核心功能之上,能够快速、准确的进行定位,精度达到30cm,测距范围达到100m。
根据是否需要测量距离,无线定位方法分成测距定位和非测距定位两类。
从测距方法来看,以RSSI为主,也有使用TOA、TDOA、AOA/DOA以及多种测距手段联合的系统。
3UWB技术3.1UWB国内研究现状我国对于UWB技术的研究相对较。
2001年,第一次将超宽带技作为无线通信的共性技术与创新技术的研究内容列入国家终点研究课题,才开始对UWB技术进行研究。
在国家科研项目的支持和鼓励下,我国的不少高校在UWB技术上取得了积极的进展,对UWB天线的设计、UWB信号的发送、UWB定位算法以及多种定位方式融合进行了研究。
UWBAntenna

UWBAntennaPrinted circular disc monopole antennafor ultra-wideband applicationsJ.Liang,C.C.Chiau,X.Chen and C.G.PariniA novel and simple design of a printed circular disc monopole antennafor ultra-wideband applications is presented.The parameters whichaffect the performance of the antenna are investigated.Good agree-ment is achieved between simulation and experiment.Introduction:With the de?nition and acceptance of ultra-wideband (UWB)impulse radio technology in the USA[1],there is increasing demand for antennas capable of operating at an extremely wide frequency range.In recent years,several broadband monopole con?g-urations,such as circular,square,elliptical,pentagonal and hexago-nal,have been proposed for UWB applications[2–5].These broadband monopoles feature wide operating bandwidths,satisfactory radiation properties,simple structures and ease of fabrication. However,they are not planar structures because their ground planes are perpendicular to the radiators.As a result,they are not suitable for integration with printed circuit boards.This drawback limits practical applications of these broadband monopoles.In this Letter,a novel design of a printed circular disc monopole fed by a microstrip line is proposed based on our previous studies[6].The parameters which affect the operation of the antenna are analysed both numerically and experimentally.It has been demonstrated that the optimal design of this type of antenna can yield an ultra-wide band-width with satisfactory radiation properties over the entire bandwidth.Antenna design:The proposed monopole antenna is illustrated in Fig.1.A circular disc monopole with a radius of R?10mm and a 50O microstrip feed line are printed on the same side of the dielectric substrate(in this study,the FR4substrate of thickness1.5mm and relative permittivity4.7was used).L and W denote the length and the width of the dielectric substrate,respectively.L is constant at50mm in this study.The width of the microstrip feed line is?xed at W1?2.6mm to achieve50O impedance.On the other side of the substrate, the conducting ground plane with a length of L1?20mm only covers the section of the microstrip feed line.h is the height of the feed gap between the feed point and the groundplane.in backFig.1Geometry of proposed printed circular disc monopoleResults and discussion:The simulations are performed using the CST Microwave Studio TM package which utilises the?nite integration technique for electromagnetic computation[7].It has been shown in the simulation that the operating bandwidth of the proposed monopole antenna is critically dependent on the feed gap h and the width of the ground plane W,and these two parameters should be optimised for maximum bandwidth.Fig.2illustrates the simulated return loss curves with different feed gaps(h?0,0.3,0.7,and1.5mm)when W is?xed at42mm.It is observed in Fig.2that theà10dB bandwidth changes signi?cantly with varying feed gap h.This is due to the sensitivity of the impedance matching to the feed gap.The ground plane,serving as an impedance matching circuit,tunes the input impedance and the operating band-width while the feed gap is varied[6].The optimised feed gap is found to be at h?0.3mm.The simulated return loss curves with optimal feed gap h of0.3mm and different widths W of the ground planes,are plotted in Fig.3.It can be seen that the performance of the antenna is heavily dependent on the width W because the current is mainly distributed and transmitted on the upper edge of the ground plane along the y-direction.Simulation shows that the ground plane with a width of W?42mm can achieve the maximum bandwidth.---eturnloss,dBfrequency, GHzFig.2Simulated return loss for different feed gaps with W?42mm------returnloss,frequency, GHzFig.3Simulated return loss for different width of ground plane with h?0.3mmThe prototype of the printed circular disc monopole antenna with optimal design,i.e.h?0.3mm and W?42mm,as shown in Fig.1, was tested in the laboratory at Queen Mary,University of London (QMUL).The return losses were measured using an HP8720ES network analyser and the radiation pattern measurements were carried out inside an anechoic chamber.Fig.4shows the simulated and measured return loss curves.The measured return loss agrees well with the simulation.The measured operating bandwidth ofà10dB is from2.78to9.78GHz,and in simulation from2.69to10.16GHz.The measurement con?rms the UWB characteristic of the proposed printed circular disc monopole,as predicted in the simulation.--------returnloss,dBfrequency, GHzFig.4Simulated and measured return loss curves with W?42mm and h?0.3mmThe measured and simulated radiation patterns at3and9GHz are plotted in Figs.5and6,respectively.The patterns obtained in the measurement are close to those in the simulation.It can be seen that the proposed antenna is omnidirectional over the entire operating bandwidth.ELECTRONICS LETTERS30th September2004Vol.40No.20330300270240210180150120906030330300270240210180150120906030-40-30-20-10a b-40-30-20-100Fig.5Simulated and measured radiation patterns with W?42mm and h?0.3mm at3GHza E-planeb H-plane——simulated-------measured330300270240210180150120906030-40-30-20-100a330300270240210180150120906030-40-30-20-100bFig.6Simulated and measured radiation patterns with W?42mm and h?0.3mm at9GHza E-planeb H-plane——simulated-------measuredConclusion:A printed circular disc monopole antenna fed by micro-strip line is proposed and investigated.It has been shown that the operating bandwidth of the antenna is heavily dependent on the feed gap due to the impedance matching.The width of the ground plane also plays an important role in determining the performance of the antennabecause the current is mainly distributed along the y-direction on the ground plane.It has been demonstrated numerically and experimen-tally that the proposed printed circular disc monopole can yield an ultra-wide bandwidth,from2.78to9.78GHz,covering the frequency bands of most commercial wireless systems.It is also observed that the radiation patterns are similar to those of a traditional monopole.The results show this antenna is a good candidate for future UWB applica-tions.Acknowledgments:The authors wish to thank J.Dupuy of the Department of Electronic Engineering,QMUL,for his help inthe fabrication and measurement of the antenna.They acknowledge Computer Simulation Technology(CST),Germany,for the compli-mentary licence of the Microwave Studio TM package.#IEE200424June2004Electronics Letters online no:20045966doi:10.1049/el:20045966J.Liang, C.C.Chiau,X.Chen and C.G.Parini(Department of Electronic Engineering,Queen Mary,University of London,MileEnd Road,London E14NS,United Kingdom)E-mail:jianxin.liang@/doc/3d5769781.html References1FCC Report and Order for Part15acceptance of Ultra Wideband(UWB) systems from3.1–10.6GHz,February,2002,FCC website2Ammann,M.J.,and Chen,Z.N.:‘Wideband monopole antennas for multi-band wireless systems’,IEEE Antennas Propag.Mag.,2003,45,(2), pp.146–1503Agrawall,N.P.,Kumar,G.,and Ray,K.P.:‘Wide-band planar monopole antennas’,IEEE Trans.Antennas Propag.,1998,46,(2),pp.294–2954Antonino-Daviu,E.,Cabedo-Fabre’s,M.,Ferrando-Bataller,M.,and Valero-Nogueira,A.:‘Wideband double-fed planar monopole antennas’, Electron.Lett.,2003,39,(23),pp.1635–16365Chen,Z.N.,Chia,M.Y.W.,and Ammann,M.J.:‘Optimization and comparison of broadband monopoles’,IEE Proc.Microw.Antennas Propag.,2003,150,(6),pp.429–4356Liang,J.,Chiau,C.C.,Chen,X.,and Parini,C.G.:‘Analysis and designof UWB disc monopole antennas’.IEE Seminar on Ultra Wideband Communications Technologies and System Design,Queen Mary, University of London,July2004(accepted for presentation)7CST-Microwave Studio,User’s Manual,4,2002 ELECTRONICS LETTERS30th September2004Vol.40No.20。
UWB天线的简介
超宽带及其应用超宽带技术的最初形式为脉冲无线通信,起源于20世纪40年代,从其出现到20世纪90年代之前,UWB技术主要作为军事技术在雷达和低截获率、低侦侧率等通信设备中使用。
近年来,随着微电子器件的技术和工艺的提高,UWB技术开始应用于民用领域。
超宽带通信是一种不用载波,而通过对具有很陡上升和下降时间的脉冲进行调制(通常,脉冲宽度在0.20-1.5ns之间)的一种通信,也称为脉冲无线电(Impulse Radio).时域(Time Domain)或无载波(Carrier Free)通信。
它具有GHz量级的带宽,并因其发射能量相当小,因此可能在不占用现在已经拥挤不堪频率资源的情况下带来一种全新的语音及数据通信方式。
超宽带要求相对带宽[4]比高出20%或者绝对带宽大于0.5GHz,其传输速率可超过100Mbps,具有这样特性的系统称为UWB系统。
图1.1 超宽带频谱图UWB由于占有带宽达到数GHz,即使传送路径特性良好也会产生失真,但其具有以下的优点,使得UWB仍然倍受重视。
1、抗干扰性能强:UWB采用跳时扩频信号,系统具有较大的处理增益,在发射时将微弱的无线电脉冲信号分散在宽阔的频带中,输出功率甚至低于普通设备产生的噪声。
接收时将信号能量还原出来,在解扩过程中产生扩频增益,因此,在同等码速条件下,UWB具有更强的抗干扰性。
2、传输速率高:UWB的数据速率可以达到几十Mbps到几百Mbps.3、带宽极宽:UWB使用的带宽在1GHz以上。
超宽带系统容量大,并目可以和目前的窄带通信系统同时工作而互不干扰。
4、消耗电能小:通常情况下,尤线通信系统在通信时需要联系发剔载波,因此,要消耗一定电能。
而UWB不使用载波,只是发出瞬时脉冲电波,则只在需要时才发送脉冲电波,所以消耗电能小。
5、保密性好:UWB保密性能表现在两方面:一方面是采用跳时扩频,接收机只有己知发送端扩频码时才能解出发射数据:另一方面是系统的发射功率谱密度极低,用传统的接收机无法接收。
高等天线 UWB Monopole antenna

报告人:许嘉晨
UWB天线
超宽带(Ultra-wideband)天线技术最早可追述到二十世纪五十 年代,美国伊利诺伊大学 V.H. Rumsey 与 J.D. Dyson 提出了非频变 天线的概念 (Frequency Independent Antennas),随后出现了等角螺 旋天线、阿基米德螺旋天线和圆锥螺旋天线等形式,这些天线可 采用印刷电路工艺(PCB)在高强度、低介质损耗的微波介质基片上 一次加工而成,可以获得很高的加工精度和整体辐射效率。广泛 应用于电磁兼容(EMC)、宽带通信(美国联邦委员会 FCC 对超宽带 技术做出了如下的规定:确定 3.1-10.6 GHz频段为民用 UWB 通信) 和军事电子对抗等领域的对数周期天线也受到了相当多的关注, 出现了对数周期齿形天线、对数周期振子天线、印刷对数周期天 线等形式。在宽带通信的需求推动下,涌现出了双锥天线、盘锥 天线、套筒天线、笼状天线和阻-容加载振子等宽频带线天线,可 应用于宽带跳频通信、无线电视接收等领域。此外,精心设计的 波纹喇叭天线、抛物面天线和 Vivaldi(指数渐变) 天线也具有较 为优良的超宽带特性。
频域分析&模型仿真 Nhomakorabea 时域特性
脉冲(Impulse Radiation)超宽带技术曾广泛应 用于探测、预警等雷达系统,近年来才逐渐向民 用高速无线通信业务开放。与传统的载波系统不 同,上述超宽带系统中的天线直接辐射和接收调 制短脉冲,这需要超宽带天线具有良好的时域特 性,即由天线引起的辐射脉冲宽度扩展、脉冲失 真以及振铃现象都应较小。因此为提高时域超宽 带系统的整体性能,优化超宽带天线的时域特性 是十分重要的环节。UWB 天线在时域的角度性 能参数包括: 传输函数 H(ω)、 波形保真系数 F、 能量方向性系数 D 、辐射阻抗、增益、有效截面、 极化特性。
uwb天线的基础知识及应用场景

UWB天线的基础知识及应用场景随着无线通信技术的不断发展,UWB(Ultra Wideband,超宽带)技术逐渐受到了人们的关注。
UWB天线作为UWB技术的重要组成部分,具有独特的特性和广泛的应用场景。
本文将从UWB天线的基础知识入手,介绍其工作原理、设计要点以及应用场景,希望能为读者对UWB天线有一个更全面的了解。
一、UWB天线的工作原理1. UWB天线概述UWB天线是一种能够实现超宽频带通信的天线。
在UWB通信中,信号的带宽通常是射频频段的20或更大,这就要求天线在宽频带范围内具有均匀的频率响应和高效的辐射特性。
2. UWB天线的发展历程UWB天线最早是在雷达系统中应用,在20世纪90年代后期逐渐应用于通信系统。
由于其宽频带特性和高速数据传输能力,UWB技术被认为是未来无线通信的重要发展方向。
3. UWB天线的工作原理UWB天线的工作原理主要是利用其特殊的结构和材料来实现对超宽频带信号的辐射和接收。
相比传统窄带天线,UWB天线需要考虑更多的频率响应、辐射效率和阻抗匹配等问题。
二、UWB天线的设计要点1. UWB天线的结构UWB天线的结构多种多样,常见的有螺旋天线、宽缝天线、双极子天线等。
不同结构的UWB天线在频率响应、辐射特性和阻抗匹配上有各自特点。
2. UWB天线的频率响应由于信号的超宽频带特性,UWB天线需要具有较为均匀的频率响应,以保证在整个通信频段内都能获得良好的信号传输效果。
3. UWB天线的辐射特性UWB天线的辐射特性对于通信系统中的信号传输距离、穿透能力、抗干扰能力等都有着重要影响,因此需要通过合理的设计和优化来实现良好的辐射特性。
三、UWB天线的应用场景1. 无线通信系统UWB天线在无线通信系统中得到了广泛的应用,包括室内定位、室内通信、传感器网络等领域。
由于其超宽频带特性,UWB天线能够实现更高的数据传输速率和更稳定的通信质量。
2. 雷达系统UWB天线在雷达系统中也具有重要的应用价值,能够实现对目标的高精度检测和跟踪。
uwb概念

uwb概念UWB(Ultra-wideband)被定义为一种高带宽、低发射功率的无线通信技术。
其特点是具有超宽带(UWB)信号特征,能够在射频信道上进行短距离通信和测距。
下面,我将分步骤阐述UWB概念。
一、UWB概念的起源UWB起源于上世纪七十年代,初期应用于雷达系统和防窃听设备。
而在二十一世纪初,由于其极高的数据传输速率和低功率耗散,它又开始流行起来。
目前,UWB技术已经被广泛应用于无线定位、无线测距、短距离通讯、数据传输等领域。
二、UWB技术的特点1. 高精度:UWB能够在高噪声环境下,精确地检测出不同物体之间的距离;2. 大容量:UWB能够以超高速传输数据,支持多用户同时传输;3. 低功耗:UWB以低功率的方式进行通信,并且不会产生信道干扰,能够大大延长电池寿命;4. 高安全性:由于UWB通信使用了加密技术,这使得它成为一个非常安全的通信技术;5. 高可靠性:由于UWB信号的宽带特性,在噪声和干扰环境下,其数据传输的稳定性和可靠性都非常高。
三、UWB技术的应用1. 定位和跟踪:UWB能够将物体的位置精确到毫米级别,因此被广泛应用于室内定位、人员跟踪、物品追踪等领域。
2. 短距离通讯:UWB能够进行高速无线传输,因此可以实现高清晰度的视频和音频传输,被用于VR/AR设备、智能家居和车载娱乐系统。
3. 调制:UWB技术可以用在数字调制和基带调制中,可以用于接口标准化。
4. 当地环境监测:UWB技术也可以用于当地环境监测中,例如,检测空气污染和土壤水分。
以上是UWB概念的相关介绍,我们可以清晰地了解到UWB技术的优势、应用以及潜在价值。
随着UWB技术的发展和应用场景的扩大,相信UWB技术将会给我们带来更多的惊喜!。
UWB天线的简介
超宽带及其应用超宽带技术的最初形式为脉冲无线通信,起源于20世纪40年代,从其出现到20世纪90年代之前,UWB技术主要作为军事技术在雷达和低截获率、低侦侧率等通信设备中使用。
近年来,随着微电子器件的技术和工艺的提高,UWB技术开始应用于民用领域。
超宽带通信是一种不用载波,而通过对具有很陡上升和下降时间的脉冲进行调制(通常,脉冲宽度在0.20-1.5ns之间)的一种通信,也称为脉冲无线电(Impulse Radio).时域(Time Domain)或无载波(Carrier Free)通信。
它具有GHz量级的带宽,并因其发射能量相当小,因此可能在不占用现在已经拥挤不堪频率资源的情况下带来一种全新的语音及数据通信方式。
超宽带要求相对带宽[4]比高出20%或者绝对带宽大于0.5GHz,其传输速率可超过100Mbps,具有这样特性的系统称为UWB系统。
图1.1 超宽带频谱图UWB由于占有带宽达到数GHz,即使传送路径特性良好也会产生失真,但其具有以下的优点,使得UWB仍然倍受重视。
1、抗干扰性能强:UWB采用跳时扩频信号,系统具有较大的处理增益,在发射时将微弱的无线电脉冲信号分散在宽阔的频带中,输出功率甚至低于普通设备产生的噪声。
接收时将信号能量还原出来,在解扩过程中产生扩频增益,因此,在同等码速条件下,UWB具有更强的抗干扰性。
2、传输速率高:UWB的数据速率可以达到几十Mbps到几百Mbps.3、带宽极宽:UWB使用的带宽在1GHz以上。
超宽带系统容量大,并目可以和目前的窄带通信系统同时工作而互不干扰。
4、消耗电能小:通常情况下,尤线通信系统在通信时需要联系发剔载波,因此,要消耗一定电能。
而UWB不使用载波,只是发出瞬时脉冲电波,则只在需要时才发送脉冲电波,所以消耗电能小。
5、保密性好:UWB保密性能表现在两方面:一方面是采用跳时扩频,接收机只有己知发送端扩频码时才能解出发射数据:另一方面是系统的发射功率谱密度极低,用传统的接收机无法接收。
uwb测距方案
uwb测距方案UWB(Ultra-Wideband)是一种无线通信技术,其特点是具备宽带信号传输能力,通过测量信号传输的时间来实现高精度的距离测量。
UWB技术在无线通信、雷达定位、室内定位等领域有着广泛的应用。
本文将介绍UWB测距方案的原理及其应用领域。
一、UWB测距的原理UWB测距的原理是利用UWB技术发射和接收超短脉冲信号,并通过测量信号传输的时间来计算距离。
UWB信号具有宽带和短脉冲的特点,能够在频谱上产生大量的窄带分量,这些窄带分量形成的脉冲可以在时间上提供极高的分辨率,从而实现对距离的精确测量。
UWB测距系统通常包括发射端和接收端。
发射端产生UWB信号并发送出去,而接收端接收到信号并进行处理和测距计算。
在收发过程中,由于信号在空间传播的速度是已知的(光速),通过测量信号的到达时间差可以计算出距离。
二、UWB测距方案的应用领域1. 室内定位UWB测距方案在室内定位领域具有广泛应用。
利用UWB技术可以实现对人员、物品在室内的精确定位。
这对于商场、博物馆、医院等需要实时掌握人员位置的场所来说非常重要。
室内定位可以通过部署UWB基站和接收器来实现,这些基站和接收器可以通过测距来计算被定位对象与各个基站的距离,从而确定被定位对象的位置。
2. 车联网UWB测距方案在车联网领域也有着广泛的应用。
通过将UWB器件安装在车辆上并与道路设施相连,可以实现车辆之间的精确距离测量。
这有助于提高车辆的安全性和自动驾驶的精度。
此外,UWB测距方案还可以用于车辆的停车辅助系统,通过测量与障碍物之间的距离,帮助驾驶员进行安全停车。
3. 工业应用在工业领域,UWB测距方案可以用于机器人导航和定位。
通过在机器人上搭载UWB模块,并部署UWB基站在工厂内,可以实现对机器人位置的精确定位。
这对于实现自动化生产线的管理和监控具有重要意义。
此外,UWB测距方案还可以用于对难以到达或危险区域的测量,提高工业生产的安全性和效率。
三、UWB测距方案的优势UWB测距方案相比于其他传统测距技术具有以下优势:1. 高精度:UWB技术通过测量超短脉冲信号的到达时间,可以实现高精度的距离测量,精度可达几厘米。
uwb 波长

uwb 波长UWB波长是指超宽带信号中的波长。
超宽带(Ultra-Wide Band,简称UWB)技术是一种新兴的无线通信技术,其特点是传输速率高、抗干扰能力强、穿透障碍物能力强等。
UWB技术的应用范围很广,包括雷达、测距、通信和定位等方面。
本文将从UWB波长的定义、计算公式、应用场景和未来发展等方面进行详细介绍。
一、UWB波长的定义UWB波长是指超宽带信号中一个周期所对应的距离。
由于UWB信号具有极短的脉冲宽度和非常宽的频带,因此其频率范围非常广,可以覆盖从几百兆赫兹到几千兆赫兹甚至更高频段。
因此,UWB波长相对于传统无线电通信中的波长要更短。
二、计算公式根据基本物理公式:速度=频率×波长,可以得出计算UWB波长的公式:λ=c/f,其中c为光速(299792458m/s),f为频率(Hz)。
例如,在3.1GHz时,其对应的UWB波长为λ=0.097m。
三、应用场景1.雷达:UWB雷达具有高分辨率、高精度和抗多径干扰等优点,因此被广泛应用于军事、航空航天和民用领域。
例如,UWB雷达可以用于探测障碍物、地下管道和矿井等。
2.测距:由于UWB信号具有极短的脉冲宽度,因此可以实现非常精确的距离测量。
例如,在汽车领域中,可以利用UWB技术实现车辆间的跟车控制和自动驾驶。
3.通信:UWB技术可以实现高速数据传输和低功耗通信。
例如,在智能家居领域中,可以利用UWB技术实现设备之间的无线连接和数据传输。
4.定位:由于UWB信号具有穿透障碍物能力强等特点,因此可以实现室内定位和人员追踪等功能。
例如,在物流仓储领域中,可以利用UWB技术实现货物追踪和管理。
四、未来发展随着5G时代的到来,超宽带技术将会得到更广泛的应用。
未来,UWB技术将会在智能交通、智能家居、物联网等领域中发挥越来越重要的作用。
同时,随着技术的不断进步和应用场景的拓展,UWB波长也将会进一步缩短,从而实现更高速率和更精确的测量。
总之,UWB波长是超宽带技术中非常重要的一个参数。
uwb雷达原理

uwb雷达原理
UWB雷达技术是近年来发展起来的一种新型的无线探测技术,它采用脉冲信号技术进行测距,从而解决了传统雷达技术在非对称传输、长距离勘测、多用户多工的问题,可以有效的改善传统雷达技术的性能。
UWB雷达技术是把传统雷达信号的频率宽带扩展到1000MHz以上,使得发射信号脉冲宽度小于一个纳秒,而传统雷达信号的脉宽都在数十纳秒,由此可以明显的提高UWB雷达的精度、灵敏度和动态范围。
二、UWB雷达信号特点
UWB雷达的信号特征在于:脉宽很窄,频谱宽带很大,使得UWB
雷达距离测量更精确,而且抗干扰、信号抗衰减性好。
UWB信号的脉宽极小,一般在纳秒到微秒之间,也就是1ns,10000ns,被频谱宽度扩展到1000MHz以上(部分达到10GHz),大大提高了传统雷达的精度和灵敏度,同时超宽带信号特性可以在无线传输中改善信号抗衰减性,从而改善远距离测量性能.
三、UWB雷达应用
1. 无线医疗
在医学影像诊断方面,UWB雷达可以用于对心脏及其他内脏状况的检测,可以帮助内部检查,准确分析内脏的形态,实时通过UWB雷达的方式确定心脏的形态及血管的状况,更好的诊断疾病。
2. 自动驾驶汽车
通过UWB雷达技术,可以准确的检测汽车前方障碍物的距离,从
而实现自动驾驶,大大提高了汽车的安全性,UWB雷达可以实时精准的检测前方障碍物及汽车的距离,从而控制汽车的速度,实现自动驾驶。
3. 安全防护
UWB雷达可以用于安全防护,准确检测攻击者的位置及运动状态,有效的抵御攻击,UWB雷达可以检测攻击者的位置及运动状态,使得防护者能够及早发现攻击,从而有效的抵御攻击,保护人们的安全。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
An Ultrawide-band Microwave Radar Sensor for Nondestructive Evaluation of Pavement SubsurfaceJoongsuk Park and Cam Nguyen,Fellow,IEEEAbstract—A new ultrawide-band(UWB)microwave radar sensor operating from0.6to5.6GHz has been developed using microwave integrated circuits for pavement subsurface charac-terization.UWB antennas operating from0.5–10-GHz have been designed and tested for use in the sensor.A new simple,yet effec-tive,accurate procedure was also developed to compensate for the common amplitude deviations and nonlinear phase errors pro-duced by the inherent imperfection of the system.The developed compensation method is applicable to other systems and effec-tively reduces the potential masking of adjacent targets as well as facilitating and increasing the accuracy for target identification of the sensor.The sensor has been used to assess a pavement sample with less than0.1in of error in the pavement’s layer thickness. The developed system represents thefirst UWB stepped-frequency radar sensor completely realized using microwave integrated circuits over the frequency range of0.6–5.6GHz for subsurface sensing applications.Index Terms—Evaluation of civil infrastructures,microwave sensors,nondestructive evaluation,stepped-frequency radar, ultrawide-band(UWB)systems.I.I NTRODUCTIONM ICROW A VE sensing has been proven as a valuable technique for nondestructive characterization of sub-surfaces.Microwave SFR can provide both deep penetration andfine resolution simultaneously for subsurface sensing and is,thus,attractive for subsurface evaluation such as measuring layer thickness and detecting damages in pavement structures. The instantaneous bandwidth of this radar at each frequency is very narrow,resulting in high signal-to-noise ratio at the receiver.Additionally,nonlinear effects caused by the inherent imperfection of the transmitter and receiver can be corrected through appropriate digital signal processing.Moreover,very low sampling frequency for the analog-to-digital converter (ADC)can be used,hence facilitating the system design. Most of the reported microwave SFRs for subsurface appli-cations operate at low frequencies and have narrow bandwidths. For example,a SFR,developed for detection of water below the pavement surface,operates from600MHz to1.112GHz [1].Another SFR operating from490to780MHz was devel-oped for detection of buried objects[2].An HP network ana-Manuscript received September9,2003;revised September7,2004.This work was supported in part by the National Science Foundation and in part by the National Academy of Sciences.The associate editor coordinating the review of this paper and approving it for publication was Dr.Dwight Woolard.J.Park is with the Digital Media R&D Center,Samsung Electronics Com-pany,Ltd.,Suwon,443-742,Korea(e-mail:joongsuk.park@). Professor C.Nguyen is with the Sensing,Imaging,and Communications Sys-tems Laboratory,Department of Electrical Engineering,Texas A&M University, College Station,TX77843-3128USA(e-mail:cam@).Digital Object Identifier10.1109/JSEN.2005.851002Fig.1.Block diagram of the UWB SFR sensor.lyzer operating from0.5to6GHz was also used as a SFR todetect concrete cracks[3],which is bulky and very expensive.Recently,an integrated-circuit SFR has been reported for sub-surface sensing[4].In this paper,we report a new compact UWB microwave SFRsensor operating from0.6to5.6GHz for measuring subsur-face characteristics of pavement.It is an extension of the workpresented in[4].The sensor is implemented using a coherentsuper-heterodyne scheme and completely realized using MICs.It employs two UWB antennas operating from0.5GHz to morethan10GHz.Its performance has been demonstrated throughaccurate measurements of pavement subsurface.A new com-pensation technique was also developed and used for correctingthe amplitude and phase errors of the system.II.S YSTEM P RINCIPLESFR sensor transmits sequencesof sinusoidal signals of different frequencies toward a target,receives return signalsfrom the target,and processes them for extracting the targetcharacteristics.In each sequence,the frequency is shifted indiscrete values—each value is held constant for a period oftime and then changed to a next higher value[5].The received signals at step frequencies,reflected from thetarget,are down-converted into an immediate-frequency(IF)signal.This IF signal is then demodulated into in-phase ()andquadrature-phase()signals in base band.The/signals rep-resent both the amplitude and phase information of the targets. 1530-437X/$20.00©2005IEEEFig.2.Photograph of the transceiver.Upon converting these analog/signals into digital/sam-ples,digital signal processing is applied on the/samples to retrieve a representative complex vector at each frequency.Each setof samples is combined to form a complex vectorarray,,from which a time-domain synthetic pulse or range pro-file representing the target is extracted and processed to reveal the pavement ’s subsurface characteristics.III.S YSTEM D ESIGNFig.1shows the system block diagram of the newly devel-oped UWB (0.6–5.6GHz)microwave SFR sensor based on the coherent super-heterodyne architecture.This frequency range was chosen to allow suf ficient penetration while achieving good resolution.The sensor consists of a transceiver,two antennas,and a digital signal processing.The transceiver architecture can be either a homodyne or super heterodyne scheme.The super-heterodyne scheme is more complex,but enables easier correc-tion of the/errors.Hence,it was selected for the developed sensor.A.TransceiverThe temperature compensated crystal oscillator (TCXO)in the transceiver generates a signal of 10MHz,which is used as the LO signal for the quadrature detector and the IF signal for the up-converter.The up-converter converts the incoming 0.59–5.59-GHz LO signals from the synthesizer to 0.6–5.6-GHz signals to be transmitted toward the targets (through an UWB transmit antenna).Alternately,the down-converter converts the returned signals from the targets (through the receiver antenna)to an IF signal of 10MHz by mixing them with the coherent LO signals from the synthesizer.The IF signal is then converted into the baseband/signal in the quadrature detector by mixing it with the coherent LO signal from the TCXO.The/signals are finally digitized with the ADCs and processed in the digital signal processing blocks to extract the target information.The transceiver is separated into two parts for easy fabrica-tion,evaluation,and trouble-shooting.One is for low-frequencycircuits and the other is for high-frequency circuits.Both low-and high-frequency circuits were fabricated on 31-mil FR-4sub-strates.The high-frequency circuits include an up-converter,a cascaded RF ampli fier,two LO ampli fiers,a low-noise ampli-fier (LNA),and a down-converter.The up-converter modulates the IF signals into the RF signals with the aid of external LO signals.The cascaded ampli fier increases the power of the trans-mitting RF signals,and the two LO ampli fiers boost the external LO up to the required power level for pumping the up-con-verter and down-converter,respectively.The LNA reduces the total noise figure of the transceiver and increases the power of the received RF signals.The down-converter demodulates the received RF signals into a single frequency called the IF signal.The low-frequency circuits consist of a stable local os-cillator (STALO),attenuators,low-pass filters (LPFs),power di-viders,an IF ampli fier,an LO ampli fier,an/detector,and a two-channel video ampli fier.A temperature controlled crystal oscillator (TCXO)is used for the STALO.The attenuators limit the power of the LO and IF signals below the speci fications of the subsequent circuits.The LPFs reduce the high frequency harmonics included in the IF signal and the IF harmonics added in the baseband/signals.The power divider splits the output of the TCXO into two,one for the IF of the up-converter and the other for the LO of the quadrature detector.The LO ampli fier increases the LO power to pump the quadrature detector.The quadrature detector down-converts the single frequency input,which includes information on targets,into the baseband/signals.The two-channel video ampli fier increases the power of the baseband/signals to meet the input range of the ADC.Fig.2depicts the photograph of the developed transceiver.B.AntennaTEM horn antennas are attractive for UWB radars owing to their inherent characteristics of wide bandwidth,high direc-tivity,good phase linearity,and low distortion.Various types of TEM horn antennas have been developed [6]–[8].A TEM horn antenna,however,needs a balun at its input,prohibiting aPARK AND NGUYEN:ULTRAWIDE-BAND MICROW A VE RADAR SENSOR3Fig.3.Sketch of the UWB antenna.direct connection between antennas and the transceiver circuit. The use of balun also limits the antenna’s operating bandwidth. Moreover,direct coupling between the transmitting and re-ceiving antennas in a bi-static system is severe.Novel UWB antennas[9]are employed in our system to allow a direct integration with the transceiver while main-taining adequate isolation between the two antennas.Fig.3 shows a sketch of the antenna.It consists of a conductor on top of a grounded dielectric substrate and,hence,resembling a microstrip structure.The dielectric medium,and,hence,the height of the conductor above the ground plane,can be changed in any particular fashion,and the conductor’s profile depends on the contour of the dielectric substrate.The antenna can be directly connected to the connector without any balun and/or transition,making it simpler physically and higher-performance electrically.When two such antennas used for the transmitter and receiver are placed against each other,the common ground plane acts as a shield between these antennas,resulting in a high isolation between them.This unique feature is extremely attractive for radar applications where a certain degree of isola-tion is always needed between transmit and receive antennas. The operation of the antenna is based on the principle of wave propagation along a transmission line.In the uniform section of the microstrip line,where the spacing between the top conductor and the ground plane is very small compared to a wavelength, wave propagation is mostly confined within the dielectric be-tween the top conductor and the ground plane.However,as the separation between the conductor and ground plane gradually increases and approaches approximately a half-wavelength or more,the energy begins to radiate in the end-fire mode and,con-sequently,the wave is no longer guided between the conductor and ground plane.The entire structure effectively behaves as an antenna.The width of the antenna aperture primarily controls the radiation at low frequencies and,hence,sets the low-fre-quency limit for radiation,while the antenna length and the con-ductor and dielectric contours control the matching over the op-erating bandwidth.The antenna used in the sensor was designed to present at least10dB of return loss over a wide band of0.5–10GHz.The length of the antenna,which is primarily restricted by the lowest operating frequency,is set to16in.Styrofoam is used as the di-electric medium to support the antenna’s top conductor.Reflec-tions from the open end and the edges were significantly reduced by appending a resistive pad to the open end and absorber tothe Fig. 4.Antenna’s reflection coefficient in the(a)time domain and (b)frequency domain,where(I)indicates the antenna alone and(II)represents the antenna with a resistive pad and absorber.edges.The resistive pad,which is made of a metalfilm with thickness and resistivity of0.025in and250/,respectively, was tuned empirically to an optimal size ofputer simulations were performed using Ansoft’s HFSS program to theoretically verify the reflection coefficients and the farfield radiation patterns.The gain and3-dB beamwidth of theantenna -plane was within6–17dBi and25–45from0.6–5GHz,re-spectively.These results led to a lateral resolution of9.5in at a distance of12in.Fig.4shows the measured reflection coefficient in both the time and frequency domains.The reflection coefficient at the low frequency end,as seen in the frequency-domain plot,is im-proved significantly due to the incorporation of the resistive pad and absorber.1The resistive pad and absorber,however,reduce the gain of the antenna and degrade the system’s sensitivity and dynamic range.A better illustration of the impact of these acces-sories is shown in the time domain plots.An additional narrow peak,indicating deterioration of the input reflection coefficient, is observed at around3.5ns when the resistive pad and absorber were not incorporated.C.Digital Signal Processing and Systematic Error Correction The baseband analog/signals are digitized into digital/signals at ADCs.These digitized/signals need signal processing to be transformed into a synthetic pulse in the time 1The resistive pad and absorber absorb energy at the low frequencies,which cannot be radiated by afinite-size antenna.4IEEE SENSORS JOURNALdomain.Therefore,signal processing including/error com-pensation and inverse discrete Fourier transform (IDFT)was de-veloped using LabView.2In the absence of errors in the/channels,thephase of thebasebandand signals,expressed in terms of the targetrange and frequencystep ,is givenby(1)where is the speed of the electromagnetic wave in themedium,is the angular frequency step,and is the number of the frequency steps.The timedelay is equal to a two-way traveltimeof.A practical (nonideal)system produces common and differ-ential amplitude and phase errors intheand channels.The common errors are caused by the common signal path such as the antennas,ampli fiers,mixers,transmission lines,filters,etc.On the other hand,the differential errors are generated in the quadrature detector due to the difference between the two mixers and the phase imbalance of the 90coupler contained in the quadrature detector.The differential amplitude and phase errors generate a Hermitian image of the response in the re-sultant synthetic range pro file,resulting in a reduction of the sensor ’s unambiguous range by one half [9].In a super-hetero-dyne system,these errors are constant in the operating frequency range,as a single constant intermediate frequency is used for the quadrature detector.Consequently,measurement and com-pensation of these errors is simple.The differential amplitude and phase errors intheand channels at an intermediate fre-quency can be measured by using the methods presented in [5]or [10].Following these techniques,the differential amplitude and phase errors were measured as 1dB and 3,respectively,for the developed microwave SFR sensor.After these differen-tial errors are corrected and normalized,the complexvectors,,for a fixed angular frequency can be written in terms of therangeas(2)where is the common amplitude deviationand is the common phase error,which consists of a linear phaseerror and a nonlinear phaseerroras(3)The common linear phase error results in a constant shift of the response in the synthetic range pro file due to the fact that a fre-quency-dependent linear phase is transformed into a constant time delay through the inverse Fourier transform (IFT)[11].Therefore,it is not needed to correct for the common linear phase error.However,the nonlinear phase error causes shifting as well as imbalance of the response in the synthetic range pro-file.The common amplitude error affects the shape of the syn-thetic range pro file signi ficantly,as they tend to defocus the re-sponse in the pro file and increase the magnitudes of the side2Agraphical software system called “Virtual Instruments ”from National In-struments.Fig. 5.Phase of the complex vector I +jQ versus frequency.(a)Linear transformation of the trace of calculated phases to a linear phase line,( + )!.(b)Magni fied drawing of (a)showing the trace of calculated phases obtained by cumulating the phase differences 18;...;18;...;18.(c)Nonlinearity of the calculated phases in polar form,where C is the k th complex vector after compensating for the common amplitudedeviation.Fig.6.Amplitude deviations and nonlinear phase errors of the complex vectors due to the imperfection of the system.lobes.Therefore,these common nonlinear phase and amplitude errors need to be corrected.To this end,a new,simple,yet ef-fective,and accurate compensation technique for the common amplitude and nonlinear phase errors of the system has been developed.In the process of correction using the new compensation tech-nique,the complex vector is measured when a metal plate is moved along a track at a fixed frequency.The metal plate has a size of33ft in order to accommodate the sensor ’s lateral reso-lution.From (2),it is seen that these complex vectors will rotate circularly as the/channels are completely balanced during the movement of the metal plate at a fixed frequency.The mag-nitude of the rotating vector is then measured and stored.This procedure is repeated at each frequency step across the oper-ating frequency range.These measured magnitudes are used as reference data to compensate for the common amplitude error.After compensating for the common amplitude error,the common nonlinear phase error needs to be corrected.Fig.5PARK AND NGUYEN:ULTRAWIDE-BAND MICROW A VE RADAR SENSOR5Fig.7.Flowchart describing the compensation procedure for the amplitude deviations and nonlinear phase errors.depicts the calculated phases of the complexvector,,over a frequency range.Cumulating the phase dif-ference between two consecutive frequencysteps,,unwraps the calcu-lated phases and makes it easy to draw the trace of the calculated phases as shown in Fig.5(a)and (b).Fig.5(c)shows that the rate of rotation of the complex vector is not constant due to the non-linear phaseerror .After drawing an appropriate linear phase line as shown in Fig.5(a),the nonlinear phaseerrors is then determined by subtracting the linear phase line from the trace ofthe calculated phases.The nonlinear phaseerrorsat all the frequency steps for the metal plate are stored in memory and used as reference data to compensate for the nonlinear phase error of an actual target.Consequently,after corrected for the nonlinear phase error,the complex vector is obtainedas(4)Fig.6shows the amplitude deviations and nonlinear phase er-rors of the measured vectors for the metal plate in the frequency band of interest.In order to compensate for the common ampli-tude and nonlinear phase errors occurred in the complex vec-tors measured for the targets,the reference data obtained for the metal plate described earlier are applied to these measuredvectors.The stored reference data()for the common amplitude errors are normalized to the maximum value of the reference data and inversed.The inverted values are stored into memory as compensation factors for the common amplitude de-viation.These factors are multiplied with the new complex vec-tors collected from the targets.The stored referencedatafor the common nonlinear phase errors are subtracted from the ex-tracted phases of the new complex vectors collected from thetargets.The procedure of compensation for the common am-plitude deviations and nonlinear phase errors is illustrated in a flowchart shown in Fig.7.Fig.8shows the normalized/outputs of the quadrature de-tector before and after compensating for the common amplitude and nonlinear phase errors.The simulation result for a (fixed)point target is shown in Fig.9,which shows that the developed compensation method for the common errors not only reduces but also balances the side lobes of the synthetic range pro file.Reduction of the side lobes reduces the possibility of masking the responses from adjacent targets and,hence,facilitating their detection.Balancing the side lobes increases the possibility and accuracy in identifying the target.Upon compensating for the errors intheand channels,thedigitaland components are combined into a complex vectorfor each frequency step.Anarray consistingofcomplex vectors correspondingto frequency steps is then formedas(5)where.Adding zeros to the complex vectorarray generates a newarrayof ele-ments.This zero padding is needed to improve the accuracy of the range and the speed of IDFT using the fast Fourier transform(FFT).Applying -point IDFT on thearraythengives (6)6IEEE SENSORSJOURNALFig.8.Normalized I/Q(a)before and(b)after compensating for the amplitude deviations and nonlinear phaseerrors.Fig.9.Synthetic range profile obtained from a target,whose main peak indicates the target location(a)before and(b)after compensating for amplitude deviations and nonlinear phase errors.Simplifying and rearranging(6)gives the magnitude response of the synthetic range profileas(7)where is the frequency stepand is the speed of light inair.From(7),the rangeinformation of a target can be derived.It is noted that an appropriate window function is also used toreduce the side lobes of the synthetic range profile,which mightmask other profiles produced by multiple targets.This windowfunction can be selected based on individual target responses.IV.M EASUREMENTA pavement sample was constructed with two layers in awooden box of3636in The top layer is asphalt having a thick-ness of2.6–2.7in.The bottom layer is base.It has a thickness of4.1in and isfilled with limestone.The sensor’s antennas werepointed directly onto the sample through air.Fig.10illustrates the single reflected signals at the interfacesbetween the sample’s layers.Multiple reflections in thesampleFig.10.Sketch of the pavement sample in a wooden box together with theincident and reflected waves.E is the incident wave;E,E,and E arethe reflected waves at the interfaces between layers0and1,layers1and2,andlayer2and the wooden box,respectively.were ignored,as they are typically very small compare to thesingle reflected signal.It is assumed that the layers are homo-geneous and have negligible loss.These assumptions are notcorrect for practical pavement materials.However,as will beseen later,accurate measured results,for practical engineeringpurposes,were achieved for a practical pavement sample,thusjustifying the supposition.With reference to Fig.10,the singlereflectedwave is givenas(8)where represents the incidentwave;is the reflectioncoefficient at the interface between layers1and2;andandare the transmission coefficients from layers0to1and1to0,respectively.The relative dielectricconstant oflayer(,1,2)can be derived,assuming an incident wavefrom layer tolayer,as(9)where is the relative dielectric constant of layerandis the reflection coefficient at the interface between layersand.The reflection coefficient between the air and asphaltlayer can be expressedas(10)PARK AND NGUYEN:ULTRAWIDE-BAND MICROW A VE RADAR SENSOR7Fig.11.Synthetic range pro files obtained from a metal-plate target and the pavement sample.where is the amplitude of a wave re flected from a metal plate,which is approximately equal to the amplitude of the in-cidentwave.is the amplitude of the re flected wave at the interface between the air and asphalt layer.The relative di-electricconstantof the asphalt layer can be obtained from (9)and (10).The re flection coef ficient at the interface between the asphalt and base layers is obtained from (8)as(11)where represents the amplitude of the re flected wave at the asphalt ing (9)and (11),the relative dielectric constant of the base layer can be calculatedas(12)The thickness of layer can be derived from (7)in Section IIas(13)where is the range cell number between layers andlayer .It should be mentioned here that this procedure can also be applied for structures containing more than three layers.Fig.11shows the synthetic range pro files obtained from the pavement sample and the metal plate.Table I shows the mea-sured parameters of the pavement sample along with the ac-tual values.The measured thickness of each layer agrees well with the actual values.Note that the theoretical relative dielec-tric constants of the sample ’s asphalt and base materials are not known.Several values of dielectric constants for asphalt and base can be found from literature but these are not used for com-parison here since 1)the reported values vary over a wide range,2)they are at frequencies different from those used here,and 3)the reported asphalt and base materials are not the same as those in our pavement sample.It should be noted that the sensor can also be used to as-sess other samples that have more complicated layer structuresTABLE IC OMPARISON B ETWEEN A CTUAL AND M EASURED DATAwithin the constraints of penetration depth and resolutions pro-vided by the sensor.V .C ONCLUSIONA new integrated-circuit UWB microwave stepped-fre-quency radar sensor including antennas has been successfully developed and demonstrated for accurate measurement of pavement subsurface.A new correction procedure was also developed to compensate for the imperfection of the system.This simple compensation method reduces and balances the side lobes of the synthetic range pro file representing the target,which helps reduce the potential masking of adjacent targets and facilitate and increase accuracy for identi fication of the target responses.The sensor ’s operation has been veri fied by measuring layer thickness and relative dielectric constants of a pavement sample.The system represents the first 0.6–5.6-GHz portable microwave SFR developed for pavement subsurface sensing and is useful not only for nondestructive evaluation of pavements and other highway structures,but also for other subsurface sensing applications like detection of buried mines.A CKNOWLEDGMENTThe authors would like to thank T.Scullion and L.Gustavus of the Texas Transport Institute for providing the pavement sample.8IEEE SENSORS JOURNALR EFERENCES[1]R.C.Pippert,K.Soroushian,and R.G.Plumb,“Development ofa ground-penetrating radar to detect excess moisture in pavementsubgrade,”in Proc.2nd Government Workshop on GPR—Advanced Ground Penetrating Radar:Technologies and Applications,Oct.1993, pp.283–297.[2] ngman,S.P.Dimaio,B.E.Burns,and M.R.Inggs,“Develop-ment of a low cost SFCW ground penetrating radar,”in Proc.IEEE Geo-science and Remote Sensing Symp.,1996,pp.2020–2022.[3] D.Huston,J.O.Hu,K.Maser,W.Weedon,and C.Adam,“GIMAground penetrating radar system for monitoring concrete bridge decks,”J.Appl.Geophys.,vol.43,pp.139–146,2000.[4]J.Park and C.Nguyen,“An ultra-wideband microwave radar sensor forcharacterizing pavement subsurface,”in Proc.IEEE IMS,Jun.2003,pp.1443–1446.[5] D.R.Wehner,High Resolution Radar.Norwood,MA:Artech House,1995.[6] E.A.Theodorou,M.R.Gorman,P.R.Rigg,and F.N.Kong,“Broad-band pulse-optimized antenna,”Proc.Inst.Elect.Eng.H,vol.128,pp.124–130,Jun.1981.[7]J.D.Cermignani,R.G.Madonna,P.J.Scheno,and J.Anderson,“Mea-surement of the performance of a cavity backed exponentiallyflared TEM horn,”Proc.SPIE,vol.1631,pp.146–154,1992.[8]M.Kanda,“The effects of resistive loading of“TEM”horns,”IEEEput.,vol.EC-24,no.2,pp.245–255,May 1982.[9] C.Nguyen,J.Lee,and J.Park,“Novel ultra-wideband microstrip quasi-horn antenna,”Electron.Lett.,vol.37,no.12,pp.731–732,2001.[10] F.E.Churchill,G.W.Ogar,and B.J.Thompson,“The correction ofI and Q errors in a coherent processor,”IEEE Trans.Aerosp.Electron.Syst.,vol.AES-17,no.1,pp.131–137,Jan.1981.[11]J.G.Proakis and D.G.Manolakis,Digital Signal Processing.Engle-wood Cliffs,NJ:Prentice-Hall,1996.Joongsuk Park received the B.S.degree in electricalengineering from Yonsei University,Seoul,Korea,in1988and the Ph.D.degree in electrical engineeringfrom Texas A&M University(TAMU),College Sta-tion,in2003.From1988to1996,he was with LG ElectronicsCompany,Seoul,as a Senior Researcher,developingdigital televisions.From1998to2003,he wasa Research Assistant in electrical engineering atTAMU,developing microwave and millimeter-waveintegrated circuits and systems.In2004,he joined the Digital Media Research Center,Samsung Electronics,Suwon,Korea, as a Principal Engineer,where he is currently developing a wireless home networking system.His research interests include the design of microwave and millimeter-wave integrated circuits and antennas and wireless sensors and communicationsystems.Cam Nguyen(F’03)joined the Department of Elec-trical Engineering,Texas A&M University(TAMU),College Station,in December1990,where he nowholds the position of Texas Instruments EndowedProfessor.From2003to2004,he was ProgramDirector at the National Science Foundation,respon-sible for research programs in RF electronics andwireless technologies.From1979to1991,he heldvarious positions in industry.He was a MicrowaveEngineer with ITT Gilfillan Company,a Member ofTechnical Staff with Hughes Aircraft Company(now Raytheon),a Technical Specialist with Aeroject ElectroSystems Company, a Member of Professional Staff with Martin Marietta Company(now Lock-heed-Martin),and a Senior Staff Engineer and Program Manager at TRW(now Northrop Grumman).While in industry,he led numerous microwave and mil-limeter-wave activities and developed many microwave and millimeter-wave integrated circuits and systems up to220GHz for communications,radar,and remote sensing.His research group at TAMU focuses on CMOS RF ICs and systems,microwave and millimeter-wave ICs and systems,and UWB devices and systems for various engineering applications.Particularly,his research group has been at the forefront of developing UWB ICs and systems for radar and wireless communications and pioneered the development of microwave and millimeter-wave integrated circuit systems for sensing applications.He has published more than140papers,one book,and several book chapters.Dr.Nguyen is the Founding Editor-in-Chief of Subsurface Sensing Technolo-gies and Applications:An International Journal.。