Optimal Filters for the Detection of Continuous Gravitational Waves
Optimal Control and Estimation

Optimal Control and Estimation Optimal control and estimation are crucial concepts in the field ofengineering and mathematics, playing a significant role in various real-world applications such as robotics, aerospace, economics, and more. These concepts are essential for designing systems that can achieve the best performance while considering constraints and uncertainties. In this discussion, we will explore the importance of optimal control and estimation from multiple perspectives, considering their practical applications, theoretical foundations, and the challenges involved in implementing these techniques. From a practical standpoint, optimal control and estimation are essential for designing and controlling complex systems such as autonomous vehicles, industrial processes, and aerospace systems. For instance, in the context of autonomous vehicles, optimal control techniquesare used to plan the vehicle's trajectory while considering factors such astraffic conditions, safety constraints, and energy efficiency. Similarly, estimation techniques such as Kalman filtering are used for state estimation, allowing the vehicle to accurately perceive its environment and make informed decisions. These applications highlight the critical role of optimal control and estimation in enabling advanced technologies that have the potential to transform various industries. On a theoretical level, optimal control and estimation are grounded in mathematical optimization and statistical inference, drawing from disciplines such as control theory, optimization, and probability theory. Optimal control problems often involve finding the control inputs that minimize a certain cost function while satisfying system dynamics and constraints. This requires a deep understanding of optimization algorithms, dynamic programming, andPontryagin's maximum principle. On the other hand, estimation methods such as the Kalman filter and particle filters are rooted in Bayesian inference, involving the recursive update of probability distributions based on noisy measurements and system dynamics. The theoretical foundations of optimal control and estimation provide the necessary framework for developing and analyzing algorithms that can handle real-world complexities. However, the implementation of optimal controland estimation techniques is not without challenges. One of the primary challenges is the need for accurate models of the system dynamics and sensor measurements. Inmany real-world applications, the underlying dynamics may be complex and uncertain, leading to difficulties in formulating precise models for control and estimation. Additionally, the computational complexity of optimal control and estimation algorithms can be prohibitive, especially for real-time applications. Balancingthe trade-off between computational efficiency and optimality is a non-trivial task, requiring careful algorithm design and implementation. Moreover, the integration of optimal control and estimation techniques with modern technologies such as machine learning and deep learning presents both opportunities and challenges. While machine learning methods can potentially enhance the accuracy of system models and sensor data processing, integrating these techniques with traditional optimal control and estimation frameworks requires a deep understanding of both domains. Furthermore, ensuring the safety and reliability of autonomous systems that rely on optimal control and estimation poses ethical and societal challenges, especially in high-stakes domains such as healthcare and transportation. In conclusion, optimal control and estimation are fundamental concepts with far-reaching implications across various domains. From enabling the autonomy of vehicles to optimizing industrial processes, these techniques are essential for achieving superior performance in the presence of uncertainties and constraints. However, the practical implementation of optimal control and estimation poses significant challenges, ranging from modeling complexities to computational considerations. Addressing these challenges requires a multidisciplinary approach, combining expertise in control theory, optimization, statistics, and emerging technologies. As we continue to advance in the era of autonomous systems and smart technologies, the role of optimal control and estimation will only become more pronounced, shaping the future of engineering and beyond.。
信号处理 扩展卡尔曼滤波数据融合代码matlab

信号处理扩展卡尔曼滤波数据融合代码matlab 如何使用扩展卡尔曼滤波(Extended Kalman Filter, EKF)进行数据融合的问题,并提供MATLAB代码示例。
引言:现代技术的快速发展使得传感器的数量和种类越来越多。
数据融合是将多个传感器的测量结果进行合并,以得到更准确、更可靠的估计值的过程。
扩展卡尔曼滤波是一种常用的数据融合算法,特别适用于非线性系统的估计。
正文:扩展卡尔曼滤波是对卡尔曼滤波的一种扩展,它利用非线性系统的一阶泰勒展开,以线性化的形式近似非线性系统。
步骤一:构建状态方程和观测方程首先,我们需要构建状态方程和观测方程。
状态方程描述系统的动力学变化,而观测方程描述传感器对状态量的测量。
假设我们有一个非线性系统,其状态方程可以表示为:x(k) = f(x(k-1), u(k-1)) + w(k-1)其中,x(k)是系统在时刻k的状态量,f是非线性函数,u(k-1)是时刻k-1的控制量,w(k-1)是过程噪声。
观测方程可以表示为:z(k) = h(x(k)) + v(k)其中,z(k)是传感器在时刻k的测量值,h是非线性函数,v(k)是观测噪声。
步骤二:线性化模型由于扩展卡尔曼滤波是基于线性化模型的,我们需要对状态方程和观测方程进行线性化处理。
线性化可以使用一阶泰勒展开来近似非线性函数。
具体地,我们可以通过对状态方程和观测方程求一阶偏导数得到线性化模型。
步骤三:初始化滤波器扩展卡尔曼滤波的初始化包括初始化状态量估计和协方差矩阵。
初始状态量估计可以通过系统初始条件提供,而协方差矩阵可以设置为一个足够大的值,表示对初始估计的不确定性。
步骤四:预测步骤在预测步骤中,我们使用状态方程和控制量来预测时刻k的状态量估计。
同时,我们也需要更新状态量的协方差矩阵。
具体地,预测的状态量估计可以表示为:x^(k) = f(x^(k-1), u(k-1))预测的协方差矩阵可以表示为:P^(k) = A * P(k-1) * A' + Q(k-1)其中,x^(k)是时刻k的预测状态量估计,P^(k)是时刻k的预测协方差矩阵,A是状态方程的雅可比矩阵,Q(k-1)是过程噪声的协方差矩阵。
重型矿山设备手册 SANDVIK 重型颚式破碎机说明书

KEY FEATURESNew generation world-class Automation & Connectivity System (ACS)Automatically adapts the crusher to varying feed condi-tions ensuring maximum 24/7 performanceHydroset™ system Provides safety and settingadjustment functionsMainframe is built as a unibody without moving parts For optimal strength and less components requiring maintenanceTop serviceability Lifting from above minimizesrisks, and allows for quicker andsafer maintenanceAdjustable eccentric throw To exactly balance capacity tothe process thus harmonizingthe crushing stagesConstant liner profile Maintains the feed opening andperformance during the entireservice life of the linersWide range of crushing chambers suited for all types of applications Choose from extra coarse crushing chambers with the largest intake to extremely fine crushing chambersMechanical dump valve for tramp iron protection Reduces pressure peaks and mechanical stress on the crusher, greatly improving reliabilityFull lubrication monitoring and control Real-time monitoring of the crusher lubrication system for increased uptime and reliabilitySandvik CH840i is a technologically advanced, high capacity mid-range cone crusher for secondary and tertiary crushing, designed for crushing applications in mines or large sized quarries.Each crusher has a hydraulically supported main shaft which is supported at both ends. With a robust design, adjustable eccentric throw, a constant intake opening, high performance can be achieved by proper selection of a Sandvik OEM crushing chamber. The CH840i brings you a revolution in intelligent crushing. Connected via the My Sandvik portal,it offer 24/7 access to data generated by your connected Sandvik crusher fleet. Now you can make decisions based on facts, and clearly see areas where you can improve uptime and productivity. My Sandvik also gives you access to manuals and ane-commerce platform for easily and efficiently buying and reordering wear and spare parts. It lets you track and trace parts online to make maintenance planning simpler.The CH840i comes with the new generation Automation and Connectivity System (ACS) as standard. The system continuously monitors and optimizes crusher performance and controls the complete lubrication system, increasing uptimeand reliability. It can automatically adjust crusher settings to compensate for crushing chamber wear, ensuring consistent product size. Hydroset™ and the advanced dump valve automatically provide overload protection to let tramp iron or other uncrushable material pass through.Bolted rather than welded top and bottom shell liners reduce maintenance time and are much safer. It’s 90% faster to change liners compared to welding. The improved over-pressure system with dedicated air channel inlets keeps dust out to increase reliability. The standard off-line filter unit keeps lubrication oil cleaner with 24/7 fine filtration, reducing wear on your internal crusher components and extending oil life by up to 5 times.GENERAL DESIGN CRITERIA Crusher type Cone crusher, hydraulically adjusted Application Minerals processingCrushing stage Secondary, tertiary, quaternary Max. feed size 250 mm CSS range 10-48 mm Nominal capacity*103-427 mtphAmbient temperature -20°C to +40°C(Contact Sandvik if outside range)Altitude of site≤ 2,000 m(Contact Sandvik if outside range)* Capacity and possible CSS is dependent on the crushing chamber, the eccentric throw, the crusher’s setting and the feed material’s bulk density, crushability, size analysis, moisture content, etc.GENERAL CRUSHER DATA Weight 20,278 kgMain frameTwo-part unibody structure without moving parts.Cast steel.Top shell Two-arm design Bottom shell Five-arm designTwo inspection hatches Feed hopper Rubber / steel lined steel hopper Two inspection doors Feed level sensor Vegapuls 67Main shaftSupported at both ends Top spider bearing and eccentric bearing Eccentric bushings (Throws – mm)• 28, 32, 36• 36, 40, 44• 44, 48, 52Eccentric speed327 rpm (50 Hz, SPC-belt)332 rpm (60 Hz, SPC-belt)331 rpm (60 Hz, 8V-belt)Max. motor power 330 kW DriveV-Belt or DirectSafety coupling Omega (for Direct drive option)Pinion shaft speed1,470 rpm (50 Hz, SPC-belt)1,494 rpm (60 Hz, SPC-belt) 1,491 rpm (60 Hz 8V-belt)SubframeWith rubber dampersMaintenance tool boxExtractor for eccentric bushing Extractor for bottom shell bushing Extractor for step bearingAdditional lifting and maintenance tools includedGENERAL INFORMATIONMOTOR CHARACTERISTICSManufacturer WEG Model W22/HGFType Three-phase, squirrel cage Weight 1,850–2,650 Kg Rated power330 kW Frequency 50/60 Hz Poles4Vibration resistanceMotor is supplied with special winding that is reinforced in order to support the vibration levels Insulation class F Protection classIP55MECHANICAL DUMP VALVE System descriptionMechanical spring loaded hydraulic valveSYSTEM CHARACTERISTICS Type Dust seal air pressure Air input Blower Air quality Filtered Air flow <70 m³/h Air pressure<10 kPa Weight (blower, hoses)25 kg Motor power 0.75 kWMotor speed 2,800 rpm (50Hz) 3,350 rpm (60Hz)Phases 3Insulation class F Protection classIP55CRUSHER DRIVE SYSTEMCRUSHER DUST EXCLUSIONCRUSHER TRAMP IRON PROTECTIONUPPER FEED HOPPERNo. of rubber liners 16Max. weight 8 kgMaterialSandvik WT6000 rubber Fastening methodBoltedCONE LINER No. of rubber liners 20Max. weight 9-10 kg / 4-5 kgMaterialManganese steel or Sandvik WT6000 rubber (option)Fastening method BoltedTOP SHELL SPIDER CAP Max. weight 198 kg MaterialCarbon steelFastening methodBolted seal with O-ringTOP SHELL ARM SHIELDS No. of shields 2Max. weight 84 kgMaterialManganese steel Fastening methodBoltedBOTTOM SHELL BODY LINERS No. of liners 10Max. weight 16-24 kg / 5-7 kgMaterialWear-resistant hardened steel or Sandvik WT6000 rubber (option)Fastening methodBoltedBOTTOM SHELL ARM LINERS No. of liners 5Max. weight 80–83 kg MaterialManganese steel Fastening method Bolted (welding*)CRUSHER WEAR PROTECTIONCRUSHING CHAMBERS Mantle alternatives A, B, FlexiFeed B Concave alternatives EC, C, MC, M, F Alloys for mantles and concaves M1, M2, M7, M9Mantle and concave backing materialPlastic free, metallic contactLifting tools for mantles and concavesAvailable as option *No main frame weldingMONITORING FUNCTIONS Main/secondary lubrication circuit dataOil temperature Oil flowOil pressureOil tank temperature Oil levelDifferential pressure across filter Pinion shaft lubrication circuit dataOil pressureDifferential pressure across filterOver-pressure air system Filter monitoring functions Offline filter statusOPERATIONAL FUNCTIONSOil heatersMain lubrication oil pump Pinion lubrication oil pump Over-pressure fan Air/oil coolers Offline filter functionsELECTRICAL HARDWARE Lubrication controlConnection modules tank Cable kit CABINET DIMENSIONS Lubrication control cabinet (LxHxD)1200x800x250 mmHYDROSET SYSTEM System designSingle reversible pump Oil tank reservoir capacity 85 liters Pump design Gear pump Pump capacity10.4 l/min @50 Hz 12.6 l/min @60 HzOil filter Filter type Spin-on Filtration grade 10 µm Filter materialGlass fiber No. of filters 1Pump motor Type Three-phase, squirrel cage Power 3 kW @50 Hz 3.6 kW @60 Hz Speed 1,500 rpm @50 Hz 1,800 rpm @60 Hz Poles4Insulation class F Protection classIP55GENERAL DATAOil tank reservoir capacitySupplies oil to the main lubrica-tion system, Pinion lubrication systems and to the Hydroset system.No. of doors3No. of inspection hatches 2 located on top of unit Cabinet materialMetalTank unit dimensions (LxWxH)1,980x1,130x2,000 mm Dry weight865 kgMAIN CRUSHER LUBRICATION SYSTEM System designClosed circuit, single pump, gravity return Oil tank reservoir capacity 400 liters Pump design Gear pump Standby pump N/APump capacity112 l/min @50 Hz 135 l/min @60 HzOil filters Filter type Filter element insert Filtration grade 25 µm Filter material Glass fiber No. of filters1TANK UNITLUBRICATION CONTROL (ACS)SETTING REGULATIONSOFTWARE PACKAGE (OPTIONAL)PINIONSHAFT LUBRICATION SYSTEM System designClosed circuit, single pump, gravity return Oil tank reservoir capacity52 liters Pump design Gear pump Pump capacity0.9 l/min @50 Hz 1.1 l/min @60 HzOil filter Filter type Spin-on Filtration grade10 µm Filter material Glass fiber No. of filters 1Pump motor Type Three-phase, squirrel cage Power 0.12 kW @50 Hz / @60 Hz Speed1,500 rpm @50 Hz 1,800 rpm @60 Hz Insulation class F Protection classIP55OPERATOR’S PANEL Dimensions (LxHxD)316X251X72.5 mm Weight3.5 kgOperational temperature -25°C to +70°C Protection class IP65Power supply10–30 VDCMONITORING FUNCTIONS(AVAILABLE WITH METRIC AND IMPERIAL UNITS)Energy consumption Hydroset hydraulic pressure Main shaft positionCalculated CSS (based on main shaft position)Lubrication oil temperatureTemperature close to the spider bearing Liner wear Historical data logAutomatic liner wear compensation (Only available for CH-models)AUTOMATION & CONNECTIVITY SYSTEM (ACS) REGULATION FUNCTIONS (CRUSHING MODES)CSS (Auto CSS)Keep CSS constant Peak Pressure (Auto Load)Keep load constant Multi-CSS (Multi – CSS)Alternate between two CSS settings10 customized programs can be storedOTHER FUNCTIONS & CABINET DIMENSIONS Push button box for manual setting of CSS Setting regulation cabinet (LxHxD)1200x600x250 mm Connection box crusher (LxHxD)600x350x155 mm Network repeater box (LxHxD)(Recommended for distances over 100m)300x300x210 mmSAFETY FUNCTIONSProtects the crusher from overload by automatically regulating the crusher based on preset operational limits and the real-time input from the crusherAlarm severity levels: Direct Stop, Sequential Stop, Feeder stop, Notices and EventsSignal permitting operation of the crusher drive motor Alarm logELECTRICAL HARDWARE Setting regulation control Power measurement unit Customer interface gateway Connection box crusher Cable kitPump motor Type Three-phase, squirrel cage Power 4 kW @50 Hz 4.8 kW @60 Hz Speed1,500 rpm @50 Hz 1,800 rpm @60 Hz Insulation class F Protection class IP55Oil heaters No. of heaters 2 (Optional 3)Type Immersion heater Rating1.65 kWInstallation typeImmersion heater tube Phases3Communication gateway interfaceControlNet DeviceNet Ethernet/IP Modbus TCP Profibus ProfinetWINiOperating system compatibility:Windows 10, Windows 8, Windows 7, Windows Vista, Windows XP, Windows 2000Simultaneously control up to 9 different crushers with ACS from a PC via Ethernet networkControl the ACS remotely using the same graphical user interface ACS ReporterExport data from theAutomation & Connectivity System to a PC for analysis and storageOFFLINE FILTER UNIT FOR MAIN LUBRICATION MANUALSPurposeRemoves particles and water from the main lubrication system in a continuous slow offline filtration process Model 27/54Oil capacity20 litersDimensions (LxWxH)650x450x1,055mm Weight 100 kg Pump designGear wheelOil filter Filter type Filter Insert Filtration grade 3 µm Filter material Cellulose Filter housing material Cast iron No. of filters 2Pump motorType Three-phase, squirrel cage Capacity 200 @50 Hz 240 @60 Hz Speed915 rpm @50 Hz 1,120 rpm @60 Hz Protection classIP55Operator’s manual Any language Installation manualAny language Installation manual appendix Any language Maintenance manual Any language Spare parts catalogueEnglish onlyKg Lb Top shell assembly 6,35814,017Bottom shell assembly 5,77212,725Main shaft assembly4,2019,262Pinion shaft housing assembly 244538Hydroset cylinder assembly 1,0802,381Feed hopper assembly 1,4403,175Eccentric assembly 7951,753Dust collar assembly239527Hoses and protection assembly 51112Crusher weight 20,27844,706Subframe1,3843,051Electric motor (max.)2,6505,842Tolat weight(incl. subframe and drive)25,26855,707OIL COOLING SYSTEMS(FOR MAIN CRUSHER LUBRICATION)STANDARD AIR/OIL COOLERS No. of units1Dry weight (incl. stand)240 kg Material Aluminum Oil volume 12.8 liters Max. air flow2.8 kg/s @50 Hz3.3 kg/s @60 HzHOT CLIMATE AIR/OIL COOLERS No. of units1Dry weight (incl. stand)390 kg Material Aluminum Oil volume 19.0 liters Max. air flow7,8 kg/s @50 Hz 9,3 kg/s @60 HzAIR COOLER FAN MOTOR Type Three-phase, squirrel cage Power 2.2 kW @50 Hz 3.6 kW @60 Hz Speed1,500 rpm @50 Hz 1,800 rpm @60 HzAIR COOLER FAN MOTOR Type Three-phase, squirrel cage Power 5,5 kW @50 Hz 6,3 kW @60 Hz Speed1,500 rpm @50 Hz 1,800 rpm @60 HzCH840i CONNECTED – NOMINAL CAPACITY* (MTPH)ConcaveEC C MC M F Max. feed size (mm)F85**14111681--F901721411279773F10025020515912192Max. motor power (kW)330330*********Eccentric throw (mm)28-5228-5228-5228-5228-52CSS (mm)810131619222529323538414448---162-193174-272186-290198-309214-334226-352238-371250-366261-335273-324289---177-210190-297203-317216-337233-364246-384259-356272-349285-312298----187-254201-313214-334228-356246-384260-406274-427287-421301-385315-374333--155-213167-261180-280192-299204-299220-282233-254245----103-132109-170119-185128-200137-214147-215156-214169-200178-----MantleA/B/FFA/B/FFA/B/FFA/BA/B* based on material with bulk density of 1,600 kg/m 3** Additional feed size requirement applicable for FF mantle only (FlexiFeed)PERFORMANCEWEIGHT (KG)T S 5-1227:03/E N G /M E T R I C © S a n d v i k M i n i n g a n d R o c k T e c h n o l o g y 2019 S A N D V I K i s a r e g i s t e r e d t r a d e m a r k o w n e d b y S a n d v i k I n t e l l e c t u a l P r o p e r t y A B i n S w e d e n a n d o t h e r c o u n t r i e s.Sandvik Mining and Rock Technology reserves the right to make changes to the information on this data sheet without prior notification to users. Please contact a Sandvik representative for clarification on specifications and options.ROCKTECHNOLOGY.SANDVIK* Always refer to the installation manualsDIMENSIONS*4159 mm (Max)2160 mm3393 m m。
驰盛D861B系列安全DVR配件说明书
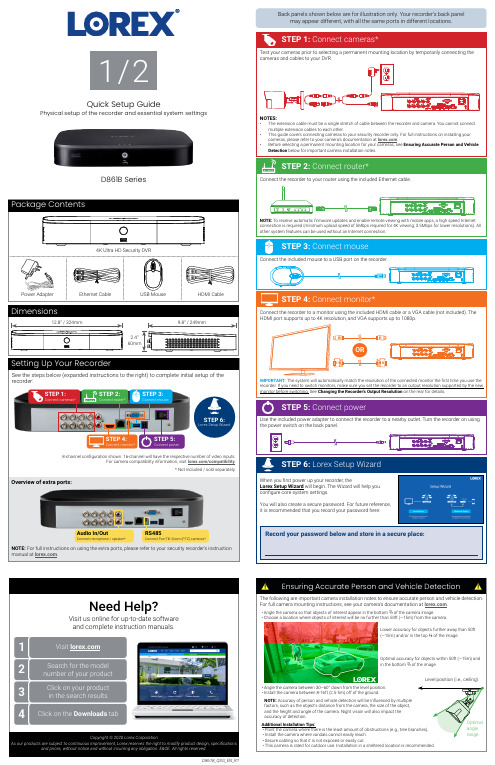
D861B_QSG_EN_R1D861B SeriesQuick Setup GuidePhysical setup of the recorder and essential system settingsBack panels shown below are for illustration only. Your recorder’s back panelmay appear different, with all the same ports in different locations.Record your password below and store in a secure place:recorder:STEP 1:Connect cameras*STEP 2:Connect router*STEP 3:Connect mouseSTEP 5:STEP 4:Overview of extra ports:Audio In/OutConnect microphone / speaker*RS485Connect Pan-Tilt-Zoom (PTZ) cameras*Ensuring Accurate Person and Vehicle DetectionThe following are important camera installation notes to ensure accurate person and vehicle detection. For full camera mounting instructions, see your camera’s documentation at .Optimal accuracy for objects within 50ft (~15m) and in the bottom ⅔ of the image.Additional Installation Tips:• Point the camera where there is the least amount of obstructions (e.g., tree branches).• Install the camera where vandals cannot easily reach.• Secure cabling so that it is not exposed or easily cut.• This camera is rated for outdoor use. Installation in a sheltered location is recommended.• Angle the camera between 30~60° down from the level position.• Install the camera between 8-16ft (2.5-5m) off of the ground.Level position (i.e., ceiling)Optimal angle NOTE: Accuracy of person and vehicle detection will be influenced by multiple factors, such as the object’s distance from the camera, the size of the object, and the height and angle of the camera. Night vision will also impact the accuracy of detection.Search through and play video recordings from the hard drive.Playback . If prompted, log in using the system user name (default:Back up recordings from the hard drive to a USB flash drive (not included).aba b c defgba cTo filter for person and vehicle recordings:Click to stopcurrent playback.d eHover over the icon. Check Person and Vehicle to filter available playback events.Wait a few seconds for the video bar to show detection events.Smart Motion Detection on any and all channels you would like to filter for person and vehicle detection. See the section Motion & Smart Motion Detection for details.a b dcgea. Select the channel you would like to configure.Click Enable .Click Setup next to Area to set an active area for motiondetection. See Figure 1 below for details.Click Setup next to Schedule to set the weekly schedulefor motion detection. See Figure 2 below for details.e. Set preferences for how the systemreacts to motion detection events.f. Click Smart Motion Detection toenable person and vehicle detection. See Figure 3 below for details.g. Click Apply to save changes.fFigure 1: Motion Detection Area• Click Enable to allow detection of people and vehicles The default schedule, shown in Figure 2, is active at all times. Click Modify to change the schedule for the corresponding day of the week.Click OK when finished.Figure 3: Smart Motion DetectionFigure 2: Motion Schedule• The camera image appears with a red grid overlay. This means the entire image is enabled for motion detection. • Click or click-and-drag to add / remove boxes from the active area. Cells that have been removed from the active area appear green.• Hover near the top of the image to reveal zone selection. You can set up to 3 different zones with different sensitivity and threshold values.• Right-click when finished.. If prompted, log in using the system user name (default: admin ) andon the far-left, then click the Deterrence tab.Set preferences for automatic warning light triggering on compatible Lorex deterrence cameras.For a complete list of compatible deterrence cameras, navigate to your recorder series at NOTE: For more information on configuring your Face Database andFace recognition set-up, refer to the DVR’s manual at .• The camera image appears with a grid overlay. The green area is the active area for deterrence. • Click or click-and-drag to add / remove boxes from the active area.• In Figure 4, only motion around the doorway will trigger warning light.Right-click when finished.• The default schedule, shown in Figure 5, is active during the night, between 5pm and 7am. • Click Modify to change the schedule for the corresponding day of the week.• Click OK when finished.a. Select the channel of a connecteddeterrence camera.b. Check Enable .c. Click Setup next to Warning Light toconfigure preferences.d. Click Setup next to Area to set ana ab bccd feactive area for automatic deterrence. See Figure 4 below for details.e. Click Setup next to Schedule to set the weekly schedule forautomatic deterrence. See Figure 5 below for details.f.Click Apply .Figure 5: Deterrence ScheduleFigure 4: Deterrence AreaConfiguring Deterrence SettingsTo set off all connected deterrence cameras’ warning lights and sirens, press and hold the front panel button for 3 seconds.Insert a formatted USB flash drive (not included) into a free USB port on the recorder.Main Menu . If prompted, log in using the system user name (default:To quickly open a window that displays vital system information such as device ID, model number, Quick Access to System InformationTap the button on the front panel of the recorder.Right-click to open the Quick Menu and click Info .ORIn live view, hover the mouse cursor over the top of the screen to open the Navigation Bar. Move the mouse cursor away from the top of the screen to close the Navigation Bar.During live view: Use the scroll wheel to zoom in / out.To configure face detection:Click Face Settings on the far-left, thenclick the Face Detection tab.Configure the following:。
SURFACTANT TOOLKit表面活性剂
Immunoasaay Enhancersfor Researchers and ManufacturersSURFACTANT TOOLKitCATALOG# RDI-SURFKT, new cat#: 55R-SURFKT $1125.00The Surfactant ToolKit contains 25 individual surfactants, many of which are not available from laboratory chemical supply houses. These surfactants have been proven by hands-on experience to be the most useful ones for the development of diagnostic test kits. Gentle, enzyme-compatible, Non Hemolyzing traits are among the many properties you will find for these surfactants:You Get These Advantages:*Improved Precision*Uniform Color Development*Faster Wetting By Sample*Uniform Uptake of Impregnation Reagents*Faster Reaction Times*No Precipitation of Reagents*Enzyme Stabilization/Activation*Faster Solubilization of Raw Materials*Dispersion of Insoluble Reagents*Emulsification of Oily Reagents*Uniform Wetting of Membrane Supports*Faster Resolubilization of Reagents*Compatible With Organic Solvents*Reproducible Sample Uptake*No Air Bubbles in the SupportThe use of surfactants in in vitro diagnostic test kit is well known to those skilled in the art, but the surfactants may not be readily available to laboratory investigators who are new to this technolog. The Surfactant ToolKit distributed by RDI Division of Fitzgerald Industries Intl is the first step to solving this problem. Even experienced reagent developers will find new surfactants and properties which they have not used before.What You Will Receive.....We include 25 cationic, anionic, nonionic, and amphoteric surfactants. Bottles contain 20 to 25 grams of each surfactant. Included for each surfactant are its trade name, chemical names, HLB, formula weight, and examples of its function, all in a handy clamshell case. MSDS sheets are available for each surfactant.Are You In Any of these Areas? Then this kit is for YOU!*Immobilized Particles*Dry Reagent Strip Tests*Medical Diagnostic Test Kits*Environmental Test Kits*Immunoassay Test Kits*ELISA Test Kits*Bioremediation*Agricultural Test Kits*Contamination Residue Clean-up*Pesticide SolubilizationReagent Kit Optimization using the Surfactant ToolKitFirst, decide what basic problems are inherent in your test. Are they manufacturing or performance problems? Manufacturing problems are generally related to reagent solubility, poor stability of the stock reagent dip, uneven impregnation/coating of the web support, air bubbles in the device, wetability, or inadequate emulsification. Performance problems typically are poor precision, lack of lot-to-lot reproducibility, low signal to background noise ratio, limited range of response, and/or limited stability/shelf-life. All these are surfactant-related problems which could be preventing your test from performing better.Next, design a screening experiment that clearly measures the characteristics to be improved. It is best to screen all 25 of the surfactants in the kit, if possible.Incorporate the 25 surfactants individually into formulation at low and high concentration levels (if you don't know what to pick, try 0.3 and 0.8%). Don't neglect to use a surfactant in each solution which will be a separate component of the kit. some surfactants may not be soluble.You will now have as many as 50 formulations. Test these formulations under full assay conditions.Now, simply look for the formulation(s) with the best performance characteristics. You may want to fine-tune for the optimal surfactant concentration for the one chosen.It's possible that more than one surfactant will be desirable in your formulation, if you have multiple performance characteristics to fix; most surfactants can be combined in together. Don't forget to choose surfactant levels above or below the level that gave good results. You may want to use formula optimization techniques at ths point. Additional technical assistance and optimization protocols may be available on custom contract-inquire for costs and details.If you obtained some improved performance with one or more of the surfactants but desire even more improvement, contact us. We can make available to you surfactants which have properties similar to the ones in the kit but were not included. For each surfactant in the kit, many more are usually available which have similar but distinct structures. Don't stop short of the desired performance characteristics you are seeking. Surfactants are not the only ingredients to give improved performance & manufacturability. Polymers, Functional Materials,Biocides & Preservatives can also be key ingredients to accomplish your objectives. See our other developers kits.Surfactant Definitions and FunctionsSurfactant-an acronym for surface active agent. This is a more modern term than detergent, generally taking the place of the term detergent when referring to wetters, solubilizers, emulsifiers, and other items defined below. Surfactants almost always work to reduce attractive interactions between like particles and bring them to unlike surfaces. Surfactant is the name we use as a general term for all our Surfactant ToolKit items.Wetting- this is simply the action of a surfactant to reduce the surface tension of a liquid. It does this by reducing like attractions of molecules with each other (such as with water) and increase the attraction towards an unlike surface. This is extremely important when reconstituting dry powders, dry beads, or reagents in solid-phase devices. If the speed and evenness of reconstitution is important, then a good wetting agent is essential. Trition X305, Surfactant 10G, Silwet L7600, and BioTerge AS-40 are all very good wetters.Solubilizers - these are surfactants that can effect a solubilization of an otherwise insoluble material. If a concentration of surfactant is made high enough, micelle structures are formed. Insoluble molecules are then incorporated into the micelles and brought into apparent solution. Oftentimes reagent developers are faced with the dilemma of having to use water-insoluble substances in aqueous solutions, orwater-soluble substances in organic solvents. Surfactants with good solubilizer properties can solve either problem. We once used Ninate 411 to solubilize a diazonium salt in acetone.Emulsification - this is the property of surfactants to form a stable emulsion of two or more immiscible liquids. This is a little like micellular solubilization, but the resultant solubilizing particles are much bigger. Occasionally you might have a reagent in an oil form that needs to go into an aqueous solution.There are several surfactants such as Trition X45, BRIJ 35, the TWEENs. and Igepal CA210, that can help with this.Dispersion - an important property of surfactants that keeps insoluble particles in suspension. They do this by preventing insoluble particles from aggregating with each other. The smaller the particles, the more stable the dispersion formed. Have you ever scaled up a reagent prep and had the pilot supervisor point out a bunch of unsightly crud settling out, hithert unseen at the bench? Your worst nightmare! Sometimes even the best of efforts will not keep things in solution, and then what you need is a surfactant with good dispersing properties. Tetronic 1307,Geropon T-77, and Rhodasurf ON-870 are good choices here.Detergency - the ability of a surfactant to remove particles from a surface. We use this narrow definition to describe a detergent. Liken this function to the cleaning action of a surfactant to lift soil from a fabric. In the reagent development setting, it might bedesirable to release reagents from membranes, paper filters, glass surfces and the like upon wetting. Surfactants with long, straight carbon chains, such as Bio-TergeAS-40,Standapol ES-1, and Chemal LA-9, are often the most effective here.rev:July 14, 1997Surfactant Toolkit Contents: (subject to change without notice-see insert with each kit)1. Amine alkylbenzene sulfonate, Trade Name: NINATE 411, Class A, MW: 385,Function: Solvent compatible,good enulsifier.2. Poly(oxyethylene-co-oxypropylene) block polymer: Trade Name:Pluorinic (tm) F68, Class N, MW 8400, Function: excellent solubilizerand detergent; probablynon-hemolytic3. Telomer B monoether with polyethylene glycol,Trade name: Zonyl(tm)FSN 100, Class N, Function: Excellent wetter at very low concentration.Soluble in 30% IpOH, alcohols.4. Sodium dioctylsulfosuccinate, Trade name: Aerosol(tm) OT 100%. Class A, MW 445, Function: Useful in solvent/TMB systems,a strong wetter and emulsifier, good antifog, mold-release and dispersing properties.5. Sodium N-oleyl-N-methyltaurate, Trade name GEROPON(tm) T-77, Class A, MW 425, Function: Good wetting, dispersing properties.6. Sodium olefin(C(14)-C(16)) sulfonate, Trade name BIO-TERGE(tm) AS-40, Class A, MW 315, Function: Mild, solvent-compatible.7.Sodium polyoxyethylene(1) lauryl sulfate, Trade name STANDAPOLES-1, Class A, MW 346, Function: A strong anionic surfactant. Contains 2 parts in 5 sodium lauryl sulfate.8.`Benzalkonium (C(8)-C(18)) chloride, Class C, MW Mixture, Function, Antimicrobial,solvent compatible.9. Ethylenediamine alkoxlate block copolymer, Trade name, Tetronic(tm) 1307, Class M, HLB >24, MW 18600, Function: Non-hemolytic. solvent compatible, antistatic: good defoamer, disperser.10.2,4,7,9-Tetramethyl-5-decyne-4,7-diol ethoxylate (10), Trade name: Surfynol(tm) 465, Class: N, HLB: 13, MW: Mixture, Function: Non-hemolytic; good wetter and defoamer.11.2.4.7.9-Tetramethyl-5-decyne-4, 7-diol ethoxylate (30), Trade name: Surfynol(tm) 485, Class: N, HLB: 17, MW: Mixture, Function: Non-hemolytic, enzyme-compatible: good wetter and defoamer.12.Octylphenol ethoxylate (1.2), Trade name: IGEPAL(tm) CA210, Class: N, HLB: 4.6, MW: 272, Function: Solvent compatible, good emulsifier.13.Octylphenoxypolyethoxy (5)ethanol, Trade name: TRITON(tm) X-45, Class N, HLB: 10.4, MW: 426, Function: Solvent compatible: good emulsifier and dispersant.14.Octylphenoxypolyethoxy(9-10)ethanol, Trade name: TRITON(tm) X-100, Class: N, HLB: 13.5, MW: 625, Function: Emulsification, wetting, dispersing; very enzyme compatible.15.Octylphenoxypolyethoxy(30)ethanol, Trade Name: TRITON(tm) X305, Class: N, HLB: 17.3, MW: 1526, Function: Non-hemolytic, very water soluble: good wetter and emulsifier.16.Polydimethylsiloxane methylethoxylate, Trade name: SILWET(tm) L7600, Class N, HLB: 13-17, MW: 4000, Function: Non-hemolytic, silicone-based; water soluble, antifogging.17.Polyethoxylated(20) oleyl alcohol, Trade name: RHODASURF ON-870, Class: N, HLB: 15.4, MW: 1148, Function: Emulsifier,solubilizer, dispersant.18.Polyethoxylated(35) castor oil, Trade name: Cremophor(tm) EL, Class N, HLB:12-14, MW: NA, Function: Non-hemolytic, solvent compatible: emulsifier, solubilizer.19. Polyoxyethelene(20)sorbitan monolaurate, Trade name: TWEEN(tm) 20, Class: N, HLB: 16.7, MW: 1228, Function: Non-hemolytic, very hydrophillic; solubilizer, emulsifier.20.Polyoxyethelene(20)sorbitan monooleate, Trade name: TWEEN(tm)80,Class: N, HLB: 15 MW: 1310, Function: Non-hemolytic,very hydrophillic: solubilizer, emulsifier.21.Polyoxyethylene(23) dodecyl ether, Trade name: BRIJ(tm) 35, ClassN, HLB: 16.9, MW: 1200, Function: Good Emulsifier.22.Polyoxyethylene(9) lauryl alcohol, Trade name: CHEMAL LA-9, Class: N, HLB: 13.3, MW: 583, Function: Protein solubilization.Same structure as THESIT(tm).23.Poly(oxyethylene-co-oxypropylene) block copolymer, Trade name: Pluranic(tm)L64, Class: N, HLB: 12-18, MW: 2900, Function: Non-hemolytic, solvent compatible: excellent wetter,good emulsifier.24.p-[sonomylphenoxypoly(glycidol), Trade name: SURFACTANT 10G, Class: N, HLB: 12.4, MW: Mixture, Function: Non-hemolytic, v.enzyme-compatible, low foaming: good wetter.25.Sorbitan Monostearate, Trade name: SPAN(tm) 60, Class: N, HLB: 4.7, MW: 431, Function: Oil soluble, solvent-compatible, water insoluble.N = nonionic A = anionicC = cationic M = amphotericHLB = Hydrophile-Lipophile Balance Number. The higher the number, the more hydrophilic the surfactant. Only applies to non-ionics.NINATE(tm) and BioTerge(tm) are registered trademarks of Stephen Co. Aerosol(tm) is a registered trademark of American Cyanamide Co. Geropon(tm) and Igepal(tm) are registered trademarks of Rhone-Poulenc,Inc. Pluronic(tm), Tetronic(tm), and Cremophor(tm) are registered trademarks of BASF Corp. Surfynol(tm) is a registered trademark of Air Products and Chemicals Inc. TRITON(tm) and SILWET(tm) are registered trademarks of Union Carbide. TWEEN(tm), BRU(tm), and SPAN(tm) are registered trademarks of ICI Americas, Inc. Zonyl(tm) is a registered trademark of Du Pont Chemicals.Applications Notes (additional information providied with the kit=here is a sample): Bio-Terge AS-40. tmWe used this surfactant effectively in solving some wetting and solubility problems during the development of a dry-phase urinary test device. We were experiencing a mottled color response and somewhat slow reaction times. We had a water-insoluble indicator that had resolubilize in an aqueous biological fluid, knew that wetting and solubility were the chief problem areas. We also knew that our current surfactnt, being applied in a pH 9 aqueous system, was helping somewhat, and thus launched a screen over a dozen likely surfactant choices. Bio-Terge AS-40,a mild anionic surfactant, stood out head-and-shoulders above the other candidates. The color response was strikingly better in appearance, with significant reaction speed gains.Ninate 411. tmIn another impregnation mix, we were using methylisobutylketone (MIBK) as impregnation solvent. This was a highly desirable choice over acetone for both safety and reagent stability (MIBK does not absorb water) reasons. Unfortunately, the diazonium salt we were using precipitated out of solution during the impregnation run and could not be substituted by another. We had been using no surfactant at all, and in fact rarely if ever did in organic solvents. A screen for MIBK soluble surfactants produced 6 or 8 candidates, which we then tested to hold the diazonium salt in solution. Ninate 411 was the clear winner, and now afforded us unlimited pot-life times with regard to diazonium salt stability.Aerosol OT 100%. tmThis surfactant is essential for tetramethylbenzidine (TMB) stability. TMB is an oxidative-type indicator that readily overoxi-izes to a cruddy brown color that is undesirable for either visual or instrumental readout. Aerosol OT stops the oxidation process at the nice classic robins-egg blue color. Aerosol OT is believed to accomplish this through a complexing with the TMB. The complex is tightest at the first oxidation state of TMB, and is thus stabilized at that point. Aerosol OT/TMB systems are soluble in organic solvents such as toluene. It can also be used in aqueous solutions, in which case TMB-HCI would be the appropriate indicator form.Sodium cholate/deoxycholate.These are important surfactants for cholesterol chemistries. Cholates are effective cholesterol solubilizers and cholesterol enzyme activators due to the common steroidal-like backbone structure of these surfactants and cholesterol. It is a good idea to try more than one cholate in a screen, since solubility characteristics can vary with factors such as pH and ionic strength.SILWET L7600. tmThis is a unique siloxane-based surfactant with excellent wetting power. SILWETL7600 is among the few surfactants capable of wetting Teflon (PTF E) surfaces. It is highly soluble in both water and many organic solvents. We found this surfactant particularly useful once in a the development of a solid-phase whole-blood diagnostic device that was yielding biased numbers at high RBC hematocrit. A large array of surfactants was tested, and this was the only one that could eliminate the bias. It was thought that this surfactant through its powerful action at interfaces was interference by RBCs at the RBC-test surface interface. This surfactant is totally non-hemolytic. Typical use level is from 0.01 to 1%.Surfynot 465/485. tmThis pair of surfactants is also very gentle on red blood cells and can be placed directly in materials used to adsorb or filter RBCs. Both surfactants improve the stability of latex suspensions when used either as sole emulsifying agent or in conjunction with other emulsifying surfactants. They are low-foaming, high-wetting,and are the surfactants of choice for achieving an even coating of membranes withreagents.Surfybnot 485 has a higher HLB and is thus somewhat more water soluble, although both are soluble in water to levels greater than 1.0%. Surfynol 465 has slightly lower surface tension.Note: All products are for in vitro research or futher manufacturing use only. Use of any tradenames does not offer any license for their use. Tradenames are the property of their respective owners.。
ChannelEstimation
This document gives a quick introduction of time-selective Rayleigh fading process and common channel estimation techniques.Doppler Frequency and Rayleigh Fading Process Generating Rayleigh Fading Processing Channel Estimation by Low-Pass Filtering Hard/Soft Decision FeedbackDoppler Frequency and Rayleigh Fading ProcessLet ()x t be the complex fading process for the desired user. Measurements indicate that the complex fading coefficient ()x t is a random quantity that changes slowly over time. So the mathematical nature of ()x t is a narrowband random process which has correlation over time. In the case of Rayleigh fading, ()x t is a complex Gaussian narrowband process, which can be modeled as the output of a low pass filter excited by temporally white complex Gaussian noise. The low pass filter is often referred as the shaping filter, because it determines the power spectrum shape and the temporal correlation function of the fading process. In the most widely used Jakes' model, ()x t is assumed to have the following temporal correlation function,0{()()}(2)H d E x t x t J F τπτ−=, where 0(*)J is the 0-th Bessel function of the first kind and d Fis the physical Doppler frequency. The corresponding power spectrum is()||d X f f F =≤. In current cellular systems, typical d F ranges from 5Hz to300Hz, depending on the specific situation. For example, for a carrier frequency c f of 2GHz and a mobile speed v of 30 m/sec (68 mile/hour),9830210200310c d vf F Hz c××===×, where c is speed of electromagnetic wave in the air. If d F is bigger than 100Hz, it is often referred to as "fast fading". Below we concentrateon the digital receiver and still use parameters in the above example. Suppose that the symbol duration is limited to s T . If the baud rate 1()baud s R T =is 40k /per second, then the fading rate normalized to data rate is 320014010200dd baud F f R ===×. Roughly speaking, the channel does not change much over 200 symbols. Since the fading is so slow at the symbol level, we can often neglect the change of the fading process over one symbol duration s T and assume that the fading process remains constant over asymbol, i.e., ()()s n x t x nT x ==, for (1)s s nT t n T ≤<+. According to the correlation in thecontinuous case, the correlation function is 0{}(2)H n n m d E x x J f m π−=, whered d d s baudF f F T R == is the normalized Doppler frequency. The power spectrum of n xis ()||d X f f f =≤. At last, we point out that Jakes’ model in fact is mathematically derived rather than synthesized from field measurement. While Jakes’ model does fit some field measurement, other models from measurementcampaign might be more accurate in specific cases. For example, another normalized correlation function appears in a contribution to IEEE 802.16 specification for broadband wireless access, whose power spectrum is24()1 1.720.785,||d X f f f f f =−+≤.Generating Jakes’ Rayleigh Fading ProcessingA common method to generate n x is to sum up several sinusoids, as first suggested inJakes’ book. However, this method in fact generates a deterministic process and not a truly random process. Nevertheless, it is still widely used due to its simplicity. Here are the C++ implementation and COM implementation of a modified Jakes’ model proposed in this paper by P. Dent et al . Another way is to pass white complex Gaussian noise n uthrough the following shaping filter, ()||d h f f f =≤,which is the square root of the power spectrum of n x . This filter is highly nonlinearand approximation has to be sought. Since the shaping filter has infinite impulseresponse, it is natural to seek an IIR filter for approximation. JTC recommends using a 32 order IIR filter to approximate ()h f with normalized fading rate d f of 12andthen generating slower fading process by interpolating the output from the IIR filter.A simpler method is to use an autoregressive (AR) filter to approximate ()h f , whose coefficients can be calculated from the correlation function of n x via the Yuler-Walker equation.Channel Estimation by Low-Pass FilteringThe model for flat fading channel can be expressed as, n n n n y x d v =+, where n y is the received signal and n v is the complex additive white Gaussian noise. n d is the n thtransmitted symbol and in this documentation is limited to BPSK signals taking values of 1±. We first assume that the transmitted data is known to the receiver, forexample, n d is either a known pilot symbol or a highly reliable decision. So we canalternatively write the model as H H n n n n n y d x v d =+, where we want to recover thenarrowband process n x buried in white noise H n n v d .Figure 1: Channel Estimation via Low-pass FilteringThe engineering approach is low-pass filtering of the modulation-free signal H n n y d . Low-pass filtering itself is a well studied problem, both mathematically andpractically. If the temporal correlation of the fading process is known, Wiener filter is the optimal filter. Particularly, if the fading process is generated by the IIR filter or AR filter, a Kalman filter can carry out the estimation recursively, which is computationally efficient. Note that temporal correlation is a function of thenormalized Doppler frequency and is unknown unless the vehicle speed is known. If the vehicle speed is unknown, adaptive algorithms can be used to extract the narrowband process n x from the background noise. A popular adaptive filter is thelinear predictor, where LMS or RLS is used to minimize the prediction error. There are also methods to estimate the coefficients of the AR filter when Kalman filtering is carried out. Approaches above are pursuing the optimality of the channel estimator by adapting the low-pass filter to the bandwidth/shape of the shaping filter. As a practical matter, the low-pass filter can be designed as a fixed filter to handle the maximum Doppler frequency possible, for example, a brick-wall low-pass filter with bandwidth max f . This worst-case design has been shown numerically to be robust invarious situations and the performance degradation from "optimal" filters is minimal. The reason is that typically the maximum normalized Doppler frequency is fairlysmall (for example, 1in the first paragraph) and the fixed low-pass filter can200average over sufficient number of symbols to obtain accurate channel estimate for detection. An "optimal" filter could have averaged over even more symbols to further improve the channel estimate, but bit-error-rate is dominated by the additive noisevn and will not be significantly lowered by the better channel estimate. On the other hand, if the bandwidth of the fixed low-pass filter is smaller than the true normalized Doppler frequency, the channel estimate can not keep up with channel variation and the BER degradation is more severe. Since channel estimation only incurs moderate complexity, most cellular systems employ coherent demodulation to take advantage of its 2-3dB gain over non-coherent demodulation.A useful BER expression can be found in the Appendix C of "Digital Communications" by John G. Proakis, which takes into account the impact of channel estimation error when maximal ratio combining is used. This article by me further analyzes the impact of channel estimation error in the presence of strong co-channel interference.Hard/Soft Decision FeedbackUp to now, we have assumed that the symbold is somehow known and we use n dnto remove the modulation fromy. While we can insert many pilot symbols to makenthis assumption true, the overhead consumes a lot of energy and bandwidth. A more attractive approach is to use decisions as addition pilot symbols as follows. Suppose the transmission is in blocks. After the initial channel estimate is carried out, the data block is detected. While we might make wrong symbol decisions, we still remove the modulation with these decisions and re-estimate the channel using the low-pass filter. Hopefully the correct decisions can outweigh wrong decisions and output of the low-pass filter is a better channel estimate than the initial channel estimate. This better channel estimate in turn can lead to better decisions. This procedure can be repeated several times. As found out by many practitioners, this iterative hard decision feedback method does provide decent BER even if the number of known pilot symbols is quite small. In fact, if the shaping filter is an IIR/AR filter and the channel estimator is a Kalman filter, it can be formally proved that each iteration can increase the likelihood of the demodulated symbol sequence, which justifies the validity of this intuitive idea of hard decision feedback.Figure 2: Iterative Receiver with Soft Decision FeedbackIn a fast fading environment, further improvement can be obtained by using "soft" decisions. That is, if the decision is unreliable, it is discounted in re-estimating the channel. For BPSK signals, the implementation is to multiply n y with {}H n E d , the expected value of the (conjugate of the) symbol. The rationale is that the closer the signal is to the decision boundary, the more unreliable the decision is and the smaller the amplitude of expected value of the symbol. So by using soft decision (the expected value) rather than hard decision, an unreliable decision has less impact in re-estimating the channel. Similar to the hard decision feedback case, if the shaping filter is an IIR/AR filter and the channel estimator is a Kalman filter, it can be formally proved that each iteration can increase the a posteriori probability of the channel estimate, which justifies the validity of this idea of soft decision feedback. Interested readers are referred to Chapter 4 of my thesis for the proof. Through extensive simulations we find that when the fading is slow (say, 150d f <), hard decision feedback has similar BER performance as soft decision feedback, whereas if the fading is fast, soft decision feedback is better than hard decision feedback. Our conjecture is that when fading is slow, the channel estimator can average over many symbols, so the effect of a few wrong decisions can be averaged out. However, if the fading is fast, the channel estimator can only average over limited number of symbols and the effect of wrong decisions is much harder to be averaged out.Consequently soft decision feedback is more favorable in a fast fading environment.A rigorous proof of why soft decision back is better still remains elusive, because it needs to deal with the convergence property of the expectation-maximization algorithm.from the Previous StageSoft Limiter。
数字通信中的多抽样率信号处理中英文翻译(部分)

数字通信中的多抽样率信号处理中英⽂翻译(部分)Multirate Signal Processing Concepts in Digital CommunicationsBojan VrceljIn Partial Fulfillment of the Requirementsfor the Degree ofDoctor of PhilosophyCalifornia Institute of TechnologyPasadena, California2004 (Submitted June 2, 2003)AbstractMultirate systems are building blocks commonly used in digital signal processing (DSP). Their function is to alter the rate of the discrete-time signals, which is achieved by adding or deleting a portion of the signal samples. Multirate systems play a central role in many areas of signal processing, such as filter bank theory and multiresolution theory. They are essential in various standard signal processing techniques such as signal analysis, denoising, compression and so forth. During the last decade, however, they have increasingly found applications in new and emerging areas of signal processing, as well as in several neighboring disciplines such as digital communications.The main contribution of this thesis is aimed towards better understanding of multirate systems and their use in modern communication systems. To this end, we first study a property of linear systems appearing in certain multirate structures. This property is called biorthogonal partnership and represents a terminology introduced recently to address a need for a descriptive term for such class of filters. In the thesis we especially focus on the extensions of this simple idea to the case of vector signals (MIMO biorthogonal partners) and to accommodate for nonintegral decimation ratios (fractional biorthogonal partners).Some of the main results developed here pertain to a better understanding of the biorthogonal partner relationship. These include the conditions for the existence of stable and of finite impulse response (FIR) biorthogonal partners. A major result that we establish states that under some generally mild conditions, MIMO and fractional biorthogonal partners exist. Moreover, when they exist, FIR solutions are not unique. We develop the parameterization of FIR solutions, which makes the search for the best partner in a given application analytically tractable. This proves very useful in the central application of biorthogonal partners, namely, channel equalization in digital communications with signal oversampling at the receiver. Sampling the received signal at a rate higher than that defined by the transmitter provides some flexibility in the design of the equalizer. A good channel equalizer in this context is one that helps neutralize the distortion on the signal introduced by the channel propagation but not at the expense of amplifying the channel noise. This presents the rationale behind the partner design problem which is formulated and solved. Theperformance of such equalizers is then compared to several other equalization methods by computer simulations. These findings point to the conclusion that the communication system performance can be improved at the expense of an increased implementational cost of the receiver.While the multirate DSP in the aforementioned communication systems serves to provide additional degrees of freedom in the design of the receiver, another important class of multirate structures is used at the transmitter side in order to introduce the redundancy in the data stream. This redundancy generally serves to facilitate the equalization process by forcing certain structure on the transmitted signal. If the channel is unknown, this procedure helps to identify it; if the channel is ill-conditioned, additional redundancy helpsVavoid severe noise amplification at the receiver, and so forth. In the second part of the thesis, we focus on this second group of multirate systems, derive some of their properties and introduce certain improvements of the communication systems in question.We first consider the transmission systems that introduce the redundancy in the form of a cyclic prefix. The examples of such systems include the discrete multitone (DMT) and the orthogonal frequency division multiplexing (OFDM) systems. The cyclic prefix insertion helps to effectively divide the channel in a certain number of nonoverlaping frequency bands. We study the problem of signal precoding in such systems that serves to adjust the signal properties in order to fully take advantage of the channel and noise properties across different bands. Our ultimate goal is to improve the overall system performance by minimizing the noise power at the receiver. The special case of our general solution corresponds to the white channel noise and the best precoder under these circumstances simply performs the optimal power allocation.Finally, we study a different class of communication systems with induced signal redundancy, namely, the multiuser systems based on code division multiple access (CDMA). We specifically focus on the special class of CDMA systems called `a mutually orthogonal usercode receiver' (AMOUR). These systems use the transmission redundancy to facilitate the user separation at the receiver regardless of the (different) communication channels. While the method also guarantees the existence of the zero-forcing equalizers irrespective of the channel zero locations, the performance of these equalizers can be further improved by exploiting the inherent flexibility in their design. Weshow how to find the best equalizer from the class of zero-forcing solutions and then increase the size of this class by employing alternative sampling strategies at the receiver. Our method retains the separability properties of AMOUR systems while improving their robustness in the noisy environment.Chapter 1 IntroductionThe theory of multirate digital signal processing (DSP) has traditionally been applied to the contexts of filter banks [61], [13], [50] and wavelets [31], [72]. These play a very important role in signal decomposition, analysis, modeling and reconstruction. Many areas of signal processing would be hard to envision without the use of digital filter banks. This is especially true for audio, video and image compression, digital audio processing, signal denoising, adaptive and statistical signal processing. However, multirate DSP has recently found increasing application in digital communications as well. Multirate building blocks are the crucial ingredient in many modern communication systems, for example, the discrete multitone (DMT), digital subscriber line (DSL) and the orthogonal frequency division multiplexing (OFDM) systems as well as general filter bank precoders, just to name a few. The interested reader is referred to numerous references on these subjects, such as [7]-[9], [17]-[18], [27], [30], [49], [64], [89], etc.This thesis presents a contribution to further understanding of multirate systems and their significance in digital communications. To that end, we introduce some new signal processing concepts and investigate their properties. We also consider some important problems in communications especially those that can be formulated using the multirate methodology. In this introductory chapter, we give a brief overview of the multirate systems and introduce some identities, notations and terminology that will prove useful in the rest of the thesis. Every attempt is made to make the present text as self-contained as possible and the introduction is meant to primarily serve this purpose. While some parts of the thesis, especially those that cover the theory of biorthogonal partners and their extensions provide a rather extensive treatment of the concepts, the material regarding the applications of the multirate theory in communication systems should be viewed as a contribution to a better understanding and by no means the exhaustive treatment of such systems. For a more comprehensive coverage the reader is referred to a range of extensive texts on the subject, for example, [71], [18], [19], [39], [38], [53], etc.1.1 Multirate systems 1.1.1 Basic building blocks The signals of interest in digital signal processing are discrete sequences of real or complex numbers denoted by x(n), y(n), etc. The sequence x(n) is often obtained by sampling a continuous-time signal x c(t). The majority of natural signals (like the audio signal reaching our ears or the optical signal reaching our eyes) are continuous-time. However, in order to facilitate their processing using DSP techniques, they need to be sampled and converted to digital signals. This conversion also includes signal quantization, i.e.,discretization in amplitude, however in practice it is safe to assume that the amplitude of x(n) can be any real or complexSignal processing analysis is often simplified by considering the frequency domain representation of signals and systems. Commonly used alternative representations of x(n) are its z-transform X (z) and the discrete-time Fourier transform X (O'). The z-transform is defined as X(z) = E _.x(n)z-"', and X (e j") is nothing but X(z) evaluated on the unit circle z = e3".Multirate DSP systems are usually composed of three basic building blocks, operating on a discrete-time signal x(n). Those are the linear time invariant (LTI) filter, the decimator and the expander. An LTI filter, like the one shown in Fig.1.1, is characterized by its impulse response h(n), or equivalently by its z-transform (also called the transfer function) H(z). Examples of the M-fold decimator and expander for M = 2 are shown in Fig.1.2. The rate of the signal at the output of an expander is M times higher than the rate at its input, while the converse is true for decimators. That is why the systems containing expanders and decimators are called `multirate' systems. Fig.1.2 demonstrates the behavior of the decimator andthe expander in both the time and the frequency domains.XE(z) = [X (z)]IM XD(z) = [X (z)]iM = X(z M)1 M-1 1 j2 k =M E X(z e n a)k=0for M-fold expander, and (1.1)for M-fold decimator. (1.2)The systems shown in Figs.1.1 and 1.2 operate on scalar signals and thus are called single input-single output (SISO) systems. The extensions to the case of vector signals are ratherstraightforward: the decimation and the expansion are performed on each element separately. The corresponding vector sequence decimators/expanders are denoted within square boxes in block diagrams. In Fig.1.3 this is demonstrated for vector expanders. The LTI systems operating on vector signals are called multiple input-multiple output (MIMO) systems and they are characterized by a (possibly rectangular) matrix transfer function H(z).1.1.2 Some multirate definitions and identitiesThe vector signals are sometimes obtained from the corresponding scalar signals by blocking. Conversely, the scalar signals can be recovered from the vector signals by unblocking. The blocking/unblocking operations can be defined using the delay or the advance chains [61], thus leading to two similar definitions. One way of defining these operations is shown in Fig.1.4, while the other is obtained trivially by switching the delay and the advance operators. Instead of drawing the complete delay/advance chain structure, we often use the simplified block notation as in Fig.1.4. It is usually clear from the context which of the two definitions数字通信中的多抽样率信号处理Bojan Vrcelj博⼠学位论⽂加州技术学会Pasadena, 加州2004 (委托于2003.6.2)摘要多抽样率系统普遍是被运⽤在处理数字信号⽅⾯。
卡尔曼滤波算法英文
卡尔曼滤波算法英文Kalman Filter AlgorithmThe Kalman filter is a powerful algorithm used for estimating the state of a dynamic system from a series of measurements. It is widely used in various applicationssuch as navigation, control systems, signal processing, and data fusion. The Kalman filter is an optimal estimator, meaning it provides the best estimate of the system's state given the available measurements and the system's dynamics.The Kalman filter algorithm consists of two main steps: the prediction step and the update step. In the prediction step, the algorithm uses the system's dynamics to estimate the current state of the system based on the previous state. In the update step, the algorithm incorporates the new measurement to refine the estimate and reduce the uncertainty.The Kalman filter algorithm can be summarized as follows:1. Prediction Step:- State Prediction: The algorithm uses the system's dynamics to predict the current state of the system based on the previous state.- Covariance Prediction: The algorithm also predicts the covariance of the estimated state, which represents the uncertainty in the estimate.2. Update Step:- Kalman Gain Calculation: The algorithm calculates the Kalman gain, which determines the weight given to the new measurement in the update step.- State Update: The algorithm updates the estimated state by combining the predicted state and the new measurement, using the Kalman gain.- Covariance Update: The algorithm updates the covariance of the estimated state, reflecting the reduced uncertainty after incorporating the new measurement.The Kalman filter algorithm is recursive, meaning it can be implemented in an efficient and computationally-feasible manner. The algorithm only requires the current state and measurement, and it does not need to store or process allthe previous data. This makes the Kalman filterparticularly useful for real-time applications where computational resources are limited.The Kalman filter algorithm has several key properties that make it widely applicable:1. Optimality: The Kalman filter provides the optimal estimate of the system's state, given the available measurements and the system's dynamics.2. Robustness: The Kalman filter is robust to noise and uncertainties in the measurements and the system's dynamics.3. Versatility: The Kalman filter can be applied to a wide range of linear systems, including those with multiple inputs and outputs.4. Computational Efficiency: The Kalman filter algorithm can be implemented efficiently, making it suitable forreal-time applications.The Kalman filter algorithm has been extensively studied and applied in various fields, including:- Navigation: Kalman filters are used in GPS, inertial navigation systems, and autonomous vehicles to estimate the position, velocity, and orientation of the system.- Control Systems: Kalman filters are used to estimatethe state of a system and provide feedback for control algorithms, improving the system's performance andstability.- Signal Processing: Kalman filters are used to filter and smooth signals, removing noise and improving thesignal-to-noise ratio.- Data Fusion: Kalman filters are used to combinemultiple sources of information, such as sensors, toprovide a more accurate and reliable estimate of thesystem's state.Overall, the Kalman filter algorithm is a powerful and widely-used tool for estimating the state of dynamic systems. Its optimality, robustness, and computational efficiency make it a valuable asset in various applications.卡尔曼滤波算法卡尔曼滤波是一种用于估计动态系统状态的强大算法。
赛发过滤简介(英文)

Filtration Solutions Process Filtration2Process I ndustries cover a wide range of activities from, for example, pigments, colors, polymers, starch, fine chemicals, environment-related and mining industries. The enormous diversity of the products to be handled demands a correspondingly diverse range of equipment using a wide variety of filter fabrics and fabricated filters.We offer:Sefar provides standardized filter solutions for the main types of equipment used in the process industries, based on fabrics that have been developed by Sefar to meet the needs of the customers.I t has always been the aim of Sefar to minimize our customers’ overall process costs by reducing waste and energy requirements by maximizing the service life of our filter products.– C ustomized solutions that meet the industry’s most stringent require-ments (e.g. high temperatures, chemical resistance and long life-time)– I ntegrated production: all crucial steps from yarn production and wea-ving to fabrication of ready-to-use filters – H igh quality and traceability – M ore than 50 years experience in the process industry – C omplete fabric rangeSefar has pioneered a number of unique products such as:– D ouble-layer weave belts for vacuum belt filters – H igh-temperature resistant PEEK fabrics on drum filters for the polymer industry– S EFAR TETEX ® MC, a sintered filter media for fine filtrationYour benefits:– R educed production costs (higher yield, reduced machine down-time, ...)– I mproved process safety – I mproved end-product quality – S tate-of-the-art fabricated filters – F or the main equipment types we offer standardized solutions – S efar offers world-wide local fabrications and services – S efar cooperates permanently with customers and OEMs to seek improvements to our filter solutionsContents Introduction 2Fabrics 3Fabrication 3Vacuum Belt Filter4Rotary Drum Filter5Rotary Disc Filter 6Belt Press Filter 7Filter Presse 8Horizontal Disc Filter 9Leaf Filter10Tube Press and Multi Element 11Candle Filter Bag Filter12Vibro-Sifter and Screens 13Filter Media 14–15Technical DataIntroduction3FabricsFabrics are the most important part of our filtration products.Sefar offers a unique selection of high quality mono- and multi-filament filter fabrics:– SEFAR TETEX ® MONO - easy cleaning- resistance to clogging– SEFAR TETEX ® DLW- improved stability on vacuum belt filters - drainage on vacuum belt filters– SEFAR TETEX ® MULTI and SEFAR TETEX ® MC - fine filtration- special applications– S EFAR PETEX ®, SEFAR NITEX ®, SEFAR ® PROPYLTEX, SEFAR ® FLUORTEX and SEFAR CARBOTEX ® - screening- sifting operationsSpecific requests such as FDA conformity can be discussed on request.FabricationSefar has established special state-of-the-art fabrication techniques in order to meet the most stringent quality expectations at no extra cost as well as continuous process and product improvement.The following specialized processes illustrate our constant effort to meet these requirements:– Various types of continuous edge coatings for belts – Special latex coating for filter cloth– High-frequency welding for, for example, rotary drum screens – Ultrasonic and hot-wedge welding of fabrics – Various types of closures for beltsTell us your requirements and we will be pleased to share our expertise with you.4Continuous FiltersVacuum Belt FilterVacuum Belt Filter in the chemical industryoverlapCross-section of a double-layer weave (SEFAR TETEX ® DLW)With the introduction of double-layer weaves (DLW) for vacuum belt filters Sefar has established and set the standard for this type of equipment.A broad range of double-layer weaves is based on the concept of a fine filter fabric combined with an integrated robust support and drainage fabric.We offer – Filter belts– Double layer belts – FabricsDesigned for all types of vacuum belt filtersMain features – A vailable in PP, PET, PEEK and E-CTFE–C hoice of pore sizes from 7 to 160 µm – PU-edge coating– Closures in stainless steel or Hasteloy – W idths up to 3.5 m as standard, wider belts on requestYour Benefits – O ptimal chemical and thermal resistance – H igh filtration efficiency – N o particle loss – P rotected and sealed edges for trouble-free operation – L ong service life and low operating costs for all types of direct drive and rubber belt filters5Vacuum Drum Filter for Kaolin dewateringRotary drum filters are often the workhorse of filtration in the process industry. The design of the different types of drum filters reflects the enor-mous variety of jobs for this filter type and the industry. To meet this enormous range of needs Sefar has a unique range of monofilament andmultifilament fabrics and belts.Calendered fabrics with smooth surfaces Vacuum Drum Filter belt closure with special rubber profileA Overlap for the metal clipper closureB Type of rubber profileC Metal clipper closureSEFAR TETEX ® MONO with fine poresContinuous Filters Rotary Drum FilterWe offer – F ilter belts – C oversFor all rotary drum filter types.Main features – A vailable in PP, PET, PA, PEEK, PVDF and E-CTFE – P ore size from 2 to 160 µm – C hoice of edge treatment and edge profiles as required by the equipment – C losure as required for the type of rotary drumYour Benefits – O ptimal chemical and thermal resistance – N o particle loss – G ood filter performance – E asy installation – L ow maintenance costsContinuous FiltersRotary Disc FilterRotary Disc Filter for Ore dewateringSEFAR TETEX® MULTI Filter segments ready for installationRotary disc filters can provide a com-paratively large filter area that takes uponly a very small floor-space. However,today’s high-performance rotary discfilters or hyperbaric rotary disc filtersare heavily dependent on appropriatefilter fabrics. In close cooperation withleading machine producers Sefar hasdeveloped a range of mono- andmultifilament fabrics especially adaptedto the needs of this filter type.We offer– E lastic multifilament fabrics– M onofilament fabrics– D ouble-layer weave fabrics forhyperbaric filtersReady-to-install filter segments forrotary disc and hyperbaric rotarydisc filtersMain features– A vailable in PA, PP and PET– W ide choice of pore sizes– P erfect fit and snap-back properties– H igh abrasion resistanceYour Benefits– M aterial easily adjustable to meetindividual needs– G ood cake release– Low maintenance costs67Belt press filter belts for organicsludges, inorganic sludges, dewatering and deliquoring (e.g. fruit pressing) are available as standard products. Sefar has years of experience and has pioneered belt press applications in various fields.Continuous Filters Belt Press FilterWe offer– W oven fabrics – S piralled fabricsFor all types of filter belt pressesMain features – A vailable in PET. Other materials can be used on request – W ide range of pore sizes and permeability – P U coated edges – S tainless steel closures or non- marking closures – W idths up to 3.5 m as standard, wider belts available on requestYour Benefits – O ptimal selection of strengths, permeability and cake release – B elts adjusted to the different belt press constructions – C oated edges for a long and trouble-free service life – E asyinstallationHeavy-duty metal clipper closure Heavy twill weaveBelt Press for sludge dewateringSatin weaveCoated edge for maximum mechanical resistance8Discontinuous FiltersFilter PresseFilter Press with automatic cake releaseOverhang clothfor easy installationFilter Press clothsEPDM barrel neckfor demanding applicationsSefar filter fabrics have been designed to cope with the specific conditions in the filter press. The fabrication techniques and choice of fabrics are tuned to the requirements of different sludges, products and industries. Cake release, ease-of-cleaning, life-time, particle retention and service costs are just a few requirements to be taken ac-count of. Sefar has extensive experience in virtually every filter press application.A few typical examples are:– Pharmaceutical industry – filtration of e.g. biotechnical substances– Chemical industry – dyes, pigments, etc.– Environment technologies – dewate-ring of all sorts of waste and organic sludges– Food industry – dehydration of residues from beer production and filtration in the palm oil industryWe offer– O verhang cloth – B arrel neck cloth – S pecial press cloth – P late and frame press cloth For all types of filter pressesMain features– A vailable in PP, PA (different types), PET, PVDF and E-CTFE – C hoice of pore size from 2 to 160 µm – F DA-approved materials available – W elded plastic eyelets – D ouble fabric having rubber barrel neck Your Benefits – O ptimal chemical and thermal resistance – H igh dry content due to fine-tuned fabric choice – E dge coating avoids drippage – Easy installation (Velcro fastener, Filmatic, ...)9Filtration of fine particles, pigments or recovering of precious catalysts are a few of the various applications for horizontal disc filters. The wide range of Sefar materials offers a uniqueopportunity to match exactly individual customer requirements. Particle reten-tion, cake release, cleaning properties and life-time are key issues for the selection of filter materials.Discontinuous Filters Horizonal Disc FilterHorizontal Disc Filter for pigment productionWe offer – L aser cut discs – S eamed discs – M ono- and multifilament fabrics For horizontal disc filters Main features– A vailable in PP, PA, PET, PEEK, PVDF, E-CTFE and PTFE – C hoice of pore sizes from 2 to 160 µm – C ustomized edge design – F DA-approved materials available Your Benefits– O ptimal chemical and thermal resistance – I ncreased filter performance – E asy installation – Low maintenance costsSEFAR TETEX ® MULTI for maximum particle retention and good mechanical resistance Special edgesSEFAR TETEX ®MONO for high permeability and easy cleaning10Discontinuous FiltersLeaf FilterLeaf Filters in a chemical plantSEFAR TETEX ® MC Cross-section for fine particle separationLeaf Filter ready for inspection and cleaning Leaf Filter bags ready for installationSefar produces many cover types including mono-, multifilament and special sintered material bags which are well-known for their unique cleaning and particle retention properties. Leaf filter pockets are manufactured in close cooperation with leading filter manu-facturers in order to ensure the best possible performance.Special attention has been paid to: – Particle retention– Cleaning performance – Life-time – I nstallationWe offer – F ilter bags – C oversFor leaf filters developed in close cooperation with leading filter manufacturersMain features – A vailable in PP, PA, PET, E-CTFE, PTFE or as required – P ore sizes from 2 to 150 µm and air permeability down to 4 l/m 2/s – S mooth, calendered surface – W elded and laser cut bags having minimal tolerancesYour Benefits – C hemical and thermal resistance to your individual needs – H igh filtration efficiency – N o particle loss – G ood cake release – E asy installation11Tube press and multi-element candle filters are popular in many industry segments due to their fully automated and smooth operation. Sefar has a range of materials and processes adapted to this type of equipment. We are able to provide a wide range of materials and diameters for tube and candle filters.Discontinuous FiltersTube Press and Multi-Element Candle FilterCandle filter for the recovering of catalystsWe offer– W oven tubes – W elded tubes – S titched tubesFor candle filters fabricated according to customer specificationsMain features – A vailable in PP, PA, PET, PEEK and E-CTFE or as required – P ore sizes from 2 to 150 µm and air permeability down to 4 l/m 2/s – T ubes having integrated support (e.g. SEFAR TETEX ® DLW)– T ubes having smooth (calendered) surfaceYour benefits – O ptimized solutions according to your requirements – I mproved particle retention, cake release and cleaning properties – U nique throughput/ pore size ratio (SEFAR TETEX ® MC)SEFARTETEX ® welded tube SEFAR TETEX ® MONO fabric for candle filters12Discontinuous FiltersBag FilterBag filter for the filtration of lacquersFilter bag with a plastic ring Filter bag with steel ring Filter bag with lifting stripsStrainer bags are available in a huge variety of designs (drawstrings, wire ring, flanged and special designs) and materials (micron-rated, high-efficiency meshes and felts). We show here just a few examples.We offer – B ags with drawstrings – W ire rings – P lastic rings – S pecial designsFor bag and strainer bag filters made of monofilament screens, multifila-ment fabrics and felts.Availability and design of these prod-ucts depend on the geographical areaMain features – A vailable in PA, PET, PP, PVDF or as required – S ealant steel or plastic ring, adjusted to various types of equipment – C ustomized designs, shapes and materials possibleYour Benefits – S tandard products available for most filter types – C ustomer-specific filters to meet special requirements possible13Silk screens for the food industry were the initial product produced during the first years in the history of Sefar.As a screening specialist we now offer screens fabricated from polyamide, polyester and also stainless steel. Our product range conforms to all of the various requirements including those of the FDA.ClassifiersVibro-Sifter and ScreensRotary screening machineWe offer– S ynthetic screens – M etallic screensFor vibro-sifters, rotary screeners and screening machinesMain features – W ide choice of materials available – B road range of high-quality meshes – S creens and rotary screens made according to individual needs – F DA-approved materials available – C onsistent tension across the screen Your Benefits– O ptimized performance for various screening applications – S uitable for food applications – L ong life-time – A brasion resistance (heavy-dutyproducts)Metal screen for Vibro-Sifter SEFAR PETEX ® open mesh screen Steel framefor a Vibro-SifterFilter mediaTechnical dataSefar offers a wide and complete range of fabrics and wire cloths for a huge variety of applications. The list below just shows some typical standard fabrics for the fabricated filter products presented in this catalogue. For complete technical lists of all our fabrics and also for information on local specialties please consult our homepage () or contact your local Sefar sales organization.A) Synthetic filter media14153105-0254-000-00/3000/10.2010Headquarters Sefar AGHinterbissaustrasse 129410 Heiden – Switzerland Phone +41 71 898 57 00Fax +41 71 898 57 21filtration@Sefar Filtration Subsidiaries Sefar Inc.Buffalo, Depew, NY – USA Phone +1 800 995 0531filtration@ Kansas City, MO – USA Phone +1 800 283 8182kcfiltration@ Sefar BDHChicoutimi – Canada Phone +1 418 690 0888info.bdh@Sefar S.A. de C.V .Iztapalapa, D.F . – MexicoPhone +52 55 2291-0652/5612-7696info.mexico@ Sefar TenylTenyl Tecidos Técnicos Ltda.Guarulhos, SP – Brazil Phone +55 11 2137-1555contato.brasil@ Sefar Singapore Pte. Ltd.SingaporePhone +65-6299 9092 info.sg@ Sefar Filtration Solutions (Suzhou) Ltd.Jiangsu Province – China Phone +86 512 @Sefar Singapore Pte. Ltd.Indonesia Rep. Office (Filtration)Jakarta Barat – IndonesiaPhone +62 21 5890 2065/66/68info.id@Sefar Fabrication (Malaysia) Sdn Bhd Johor, MalaysiaPhone +60 7 867 7188info.my@Sefar Filtration (India) Pvt. Ltd.Bhiwandi – IndiaPhone +91 2522 271139 / 271140 / 271141info.in@Sefar Pty Ltd.Huntingwood, NSW – Australia Phone +61 1300 306 661sfs@.auSefar Filter Specialists Ltd.Auckland – New Zealand Phone +64 (0) 9622 3330salesnz@ Sefar Fyltis S.A.S.Lyon 03 – FrancePhone +33 472 13 14 15vente@sefar-fyltis.fr Sefar Italia S.r. l.Collegno-Torino – Italy Phone +39 011 42001info@sefar.itSefar Maissa S.A.Cardedeu – SpainPhone +34 9 3844 4710info.maissa@ Sefar GmbH Edling – GermanyPhone +49 8071 90 400-0info@sefar.deSefar B.V .Lochem – Netherlands Phone +31 (0)573 258250info@sefar.nlSefar Ltd.Bury, Lancs – EnglandPhone +44 (0) 010765 3530sales@Sefar SP . z o.o.Poznan, PolandPhone +48 511 467 467info-pl@。
多功能眼镜的英语作文六百字以上

多功能眼镜的英语作文六百字以上Multifunctional Glasses: Revolutionizing Eyewear.In the realm of optical technology, multifunctional glasses have emerged as cutting-edge devices that transcend the traditional boundaries of eyewear. These innovative spectacles seamlessly integrate advanced features with exceptional clarity, offering an unprecedented level of functionality and convenience.Enhanced Vision for Diverse Needs.Multifunctional glasses empower users with customized vision solutions tailored to their specific needs. Photochromic lenses automatically adjust their tint in response to changing light conditions, providing optimal visual clarity both indoors and outdoors. Anti-glare coatings minimize reflections and enhance contrast, reducing eye strain and improving visibility. Blue light blocking filters shield the eyes from harmful blue lightemitted by electronic devices, protecting against digital eye fatigue.Advanced Health Monitoring.Beyond vision correction, multifunctional glasses offer sophisticated health monitoring capabilities. Built-in sensors track vital statistics such as heart rate, oxygen saturation, and blood pressure, providing valuable insights into overall well-being. Sleep monitoring functions analyze sleep patterns, identifying potential disturbances and optimizing sleep quality. These features empowerindividuals with proactive health management, enabling them to make informed decisions about their lifestyle.Immersive Digital Experiences.Multifunctional glasses seamlessly integrate with digital devices, opening up a world of immersive experiences. Augmented reality (AR) technology overlays digital information onto the real world, providing real-time navigation, language translation, and enhanced gamingexperiences. Virtual reality (VR) capabilities transport users to virtual environments, offering cinematic experiences, educational simulations, and therapeutic interventions.Convenience and Connectivity.Multifunctional glasses eliminate the need for multiple devices and accessories. Bluetooth connectivity allows the glasses to pair with smartphones and other devices, enabling hands-free calling, music playback, and message notifications. Text-to-speech functionality transforms written content into audible form, providing accessibility for individuals with reading difficulties or visual impairments.Style and Customization.Despite their advanced technological capabilities, multifunctional glasses maintain a sleek and sophisticated aesthetic. A wide range of frame styles and colors cater to diverse fashion preferences. Prescription lenses ensureoptimal vision correction, while customizable software allows users to tailor the features and settings to their unique requirements.Applications and Benefits.Multifunctional glasses find applications across various domains:Healthcare: Real-time health monitoring enables proactive management of chronic conditions, early detection of疾病, and remote patient care.Education: AR and VR technologies enhance learning experiences, providing interactive simulations, virtual field trips, and personalized assessments.Entertainment: Immersive digital experiences offer captivating content, fostering social connections and expanding entertainment options.Workplace: Bluetooth connectivity and text-to-speechfunctionality improve productivity, enhance communication, and reduce distractions.Conclusion.Multifunctional glasses represent the pinnacle of optical technology, seamlessly blending advanced features with exceptional clarity. By empowering users with customized vision solutions, advanced health monitoring capabilities, immersive digital experiences, and unparalleled convenience, these innovative devices transform the way we perceive and interact with the world around us. As technology continues to evolve, the future of multifunctional glasses holds limitless possibilities, promising even more groundbreaking functionalities andlife-enhancing benefits.。
眼科常用仪器的操作流程

眼科常用仪器的操作流程Eye examination instruments are essential tools in the field of ophthalmology. These instruments help ophthalmologists to accurately diagnose and treat various eye conditions. One commonly used instrument is the slit lamp, which allows for a detailed examination of the eye's anterior segment. 眼科检查仪器是眼科领域中不可或缺的工具。
这些仪器帮助眼科医生准确诊断和治疗各种眼部疾病。
其中一种常用的仪器是裂隙灯,它可以详细检查眼部前节。
The first step in operating a slit lamp is to ensure that the instrument is properly calibrated for accurate examination. The ophthalmologist should carefully adjust the height and angle of the slit lamp to align with the patient's eye level. Additionally, the light intensity and angle should be adjusted to allow for optimal visualization of the eye's structures. 操作裂隙灯的第一步是确保仪器经过正确的校准,以进行准确的检查。
眼科医生应该仔细调整裂隙灯的高度和角度,使其与患者的眼睛水平对齐。
匹配滤波算法的英文

匹配滤波算法的英文Title: Understanding and Implementing Matched Filtering AlgorithmMatched filtering is a signal processing technique used in many fields such as radar, sonar, and digital communication systems. This algorithm has proven to be extremely useful for detecting known signals buried under noise. In this document, we will discuss the concept of matched filtering, its mathematical principles, and how it can be implemented.1. IntroductionA matched filter is an optimal linear filter that maximizes the signal-to-noise ratio (SNR) when the signal waveform is known in advance. It is widely used in detection of weak signals in noisy environments by correlating the received signal with a replica of the expected signal.2. Mathematical PrinciplesThe matched filter is based on the cross-correlation function, which measures the similarity between two signals. The output of a matched filter is given by the convolution of the input signal with a time-reversed version of the known signal. If the input signal contains the known signal, the output of the matched filter will be a peak at the location where the known signal begins.3. ImplementationThe implementation of a matched filter involves the following steps:- Generate a replica of the known signal.- Reverse the replica in time.- Convolve the input signal with the reversed replica.- Locate the peak in the output to find the start of the known signal.4. AdvantagesThe main advantage of the matched filter is its ability to detect weak signals in noise. It provides the best possible SNR for any linear filter when the signal waveform is known. Additionally, it is relatively simple to implement computationally.5. ConclusionMatched filtering is a powerful tool in signal processing. Its effectiveness in enhancing the SNR makes it particularly useful in applications where weak signals need to be detected in noisy environments. Despite its simplicity, the matched filter remains a fundamental component in various fields including radar, sonar, and digital communications.。
数字信号处理经典 (15)Moving Average Filters

CHAPTER15EQUATION 15-1Equation of the moving average filter. Inthis equation, is the input signal, isx[]y[] the output signal, and M is the number of points used in the moving average. This equation only uses points on one side of the output sample being calculated.y[i]'1Mj M&1j'0x[i%j]y[80]'x[80]%x[81]%x[82]%x[83]%x[84]5Moving Average FiltersThe moving average is the most common filter in DSP, mainly because it is the easiest digital filter to understand and use. In spite of its simplicity, the moving average filter is optimal for a common task: reducing random noise while retaining a sharp step response. This makes it the premier filter for time domain encoded signals. However, the moving average is the worst filter for frequency domain encoded signals, with little ability to separate one band of frequencies from another. Relatives of the moving average filter include the Gaussian, Blackman, and multiple-pass moving average. These have slightly better performance in the frequency domain, at the expense of increased computation time.Implementation by ConvolutionAs the name implies, the moving average filter operates by averaging a numberof points from the input signal to produce each point in the output signal. Inequation form, this is written:Where is the input signal, is the output signal, and M is the numberx[]y[]of points in the average. For example, in a 5 point moving average filter, point80 in the output signal is given by:277The Scientist and Engineer's Guide to Digital Signal Processing278y [80]'x [78]%x [79]%x [80]%x [81]%x [82]5100 'MOVING AVERAGE FILTER 110 'This program filters 5000 samples with a 101 point moving 120 'average filter, resulting in 4900 samples of filtered data.130 '140 DIM X[4999] 'X[ ] holds the input signal 150 DIM Y[4999] 'Y[ ] holds the output signal 160 '170 GOSUB XXXX 'Mythical subroutine to load X[ ]180 '190 FOR I% = 50 TO 4949'Loop for each point in the output signal 200 Y[I%] = 0'Zero, so it can be used as an accumulator 210 FOR J% = -50 TO 50'Calculate the summation220 Y[I%] = Y[I%] + X(I%+J%]230 NEXT J%240 Y[I%] = Y[I%]/101'Complete the average by dividing 250 NEXT I%260 '270 ENDTABLE 15-1As an alternative, the group of points from the input signal can be chosen symmetrically around the output point:This corresponds to changing the summation in Eq. 15-1 from: ,j '0to M &1to: . For instance, in a 10 point moving average j '&(M &1)/2to (M &1)/2filter, the index, j , can run from 0 to 11 (one side averaging) or -5 to 5(symmetrical averaging). Symmetrical averaging requires that M be an odd number. Programming is slightly easier with the points on only one side;however, this produces a relative shift between the input and output signals.You should recognize that the moving average filter is a convolution using a very simple filter kernel. For example, a 5 point filter has the filter kernel: . That is, the moving average filter is a þ0,0,1/5,1/5,1/5,1/5,1/5,0,0þconvolution of the input signal with a rectangular pulse having an area of one .Table 15-1 shows a program to implement the moving average filter.Noise Reduction vs. Step ResponseMany scientists and engineers feel guilty about using the moving average filter.Because it is so very simple, the moving average filter is often the first thing tried when faced with a problem. Even if the problem is completely solved,there is still the feeling that something more should be done. This situation is truly ironic. Not only is the moving average filter very good for many applications, it is optimal for a common problem, reducing random white noise while keeping the sharpest step response.Chapter 15- Moving Average Filters279Sample number 0100200300400500-12FIGURE 15-1Example of a moving average filter. In (a), arectangular pulse is buried in random noise. In (b) and (c), this signal is filtered with 11 and 51point moving average filters, respectively. As the number of points in the filter increases, thenoise becomes lower; however, the edges becoming less sharp. The moving average filteris the optimal solution for this problem,providing the lowest noise possible for a given edge sharpness. Sample numberA p l i t u d A m p i t u d A m p l i t u d e Figure 15-1 shows an example of how this works. The signal in (a) is a pulse buried in random noise. In (b) and (c), the smoothing action of the moving average filter decreases the amplitude of the random noise (good), but also reduces the sharpness of the edges (bad). Of all the possible linear filters that could be used, the moving average produces the lowest noise for a given edge sharpness. The amount of noise reduction is equal to the square-root of the number of points in the average. For example, a 100 point moving average filter reduces the noise by a factor of 10.To understand why the moving average if the best solution, imagine we want to design a filter with a fixed edge sharpness. For example, let's assume we fix the edge sharpness by specifying that there are eleven points in the rise of the step response. This requires that the filter kernel have eleven points. The optimization question is: how do we choose the eleven values in the filter kernel to minimize the noise on the output signal? Since the noise we are trying to reduce is random, none of the input points is special; each is just as noisy as its neighbor. Therefore, it is useless to give preferential treatment to any one of the input points by assigning it a larger coefficient in the filter kernel. The lowest noise is obtained when all the input samples are treated equally, i.e., the moving average filter. (Later in this chapter we show that other filters are essentially as good. The point is, no filter is better than the simple moving average).The Scientist and Engineer's Guide to Digital Signal Processing 280EQUATION 15-2Frequency response of an M point moving average filter. The frequency, f, runs between 0 and 0.5. For , use:f'0H[f]'1H[f]'sin(B f M)M sin(B f)FrequencyChapter 15- Moving Average Filters281Sample number 0618240.00.21.01.2FrequencyFFT20 Log( )Aplit u deA mp itudFrequencyThe Scientist and Engineer's Guide to Digital Signal Processing282Figure 15-4 shows the frequency response of two other relatives of the movingaverage filter. When a pure Gaussian is used as a filter kernel, the frequencyresponse is also a Gaussian, as discussed in Chapter 11. The Gaussian isimportant because it is the impulse response of many natural and manmadesystems. For example, a brief pulse of light entering a long fiber optictransmission line will exit as a Gaussian pulse, due to the different paths takenby the photons within the fiber. The Gaussian filter kernel is also usedextensively in image processing because it has unique properties that allowfast two-dimensional convolutions (see Chapter 24). The second frequencyresponse in Fig. 15-4 corresponds to using a Blackman window as a filterkernel. (The term window has no meaning here; it is simply part of theaccepted name of this curve). The exact shape of the Blackman window isgiven in Chapter 16 (Eq. 16-2, Fig. 16-2); however, it looks much like aGaussian.How are these relatives of the moving average filter better than the movingaverage filter itself? Three ways: First, and most important, these filters havebetter stopband attenuation than the moving average filter. Second, the filterkernels taper to a smaller amplitude near the ends. Recall that each point inthe output signal is a weighted sum of a group of samples from the input. If thefilter kernel tapers, samples in the input signal that are farther away are givenless weight than those close by. Third, the step responses are smooth curves,rather than the abrupt straight line of the moving average. These last two areusually of limited benefit, although you might find applications where they aregenuine advantages.The moving average filter and its relatives are all about the same at reducingrandom noise while maintaining a sharp step response. The ambiguity lies inhow the risetime of the step response is measured. If the risetime is measuredfrom 0% to 100% of the step, the moving average filter is the best you can do,as previously shown. In comparison, measuring the risetime from 10% to 90%makes the Blackman window better than the moving average filter. The pointis, this is just theoretical squabbling; consider these filters equal in thisparameter.The biggest difference in these filters is execution speed. Using a recursivealgorithm (described next), the moving average filter will run like lightning inyour computer. In fact, it is the fastest digital filter available. Multiple passesof the moving average will be correspondingly slower, but still very quick. Incomparison, the Gaussian and Blackman filters are excruciatingly slow,because they must use convolution. Think a factor of ten times the number ofpoints in the filter kernel (based on multiplication being about 10 times slowerthan addition). For example, expect a 100 point Gaussian to be 1000 timesslower than a moving average using recursion.Recursive ImplementationA tremendous advantage of the moving average filter is that it can beimplemented with an algorithm that is very fast. To understand thisChapter 15- Moving Average Filters283FIGURE 15-4Frequency response of the Blackman windowand Gaussian filter kernels. Both these filtersprovide better stopband attenuation than themoving average filter. This has no advantage inremoving random noise from time domainencoded signals, but it can be useful in mixeddomain problems. The disadvantage of thesefilters is that they must use convolution, aterribly slow algorithm.FrequencyThe Scientist and Engineer's Guide to Digital Signal Processing284100 'MOVING AVERAGE FILTER IMPLEMENTED BY RECURSION 110 'This program filters 5000 samples with a 101 point moving 120 'average filter, resulting in 4900 samples of filtered data.130 'A double precision accumulator is used to prevent round-off drift.140 '150 DIM X[4999] 'X[ ] holds the input signal 160 DIM Y[4999] 'Y[ ] holds the output signal 170 DEFDBL ACC 'Define the variable ACC to be double precision 180 '190 GOSUB XXXX 'Mythical subroutine to load X[ ]200 '210 ACC = 0 'Find Y[50] by averaging points X[0] to X[100]220 FOR I% = 0 TO 100 230 ACC = ACC + X[I%]240 NEXT I%250 Y[50] = ACC/101260 ' 'Recursive moving average filter (Eq. 15-3)270 FOR I% = 51 TO 4949280 ACC = ACC + X[I%+50] - X[I%-51]290 Y[I%] = ACC/101300 NEXT I% 310 '320 END TABLE 15-2is used in future calculations. (The term "recursive" also has other meanings,especially in computer science). Chapter 19 discusses a variety of recursive filters in more detail. Be aware that the moving average recursive filter is very different from typical recursive filters. In particular, most recursive filters have an infinitely long impulse response (IIR), composed of sinusoids and exponentials. The impulse response of the moving average is a rectangular pulse (finite impulse response, or FIR).This algorithm is faster than other digital filters for several reasons. First,there are only two computations per point, regardless of the length of the filter kernel. Second, addition and subtraction are the only math operations needed,while most digital filters require time-consuming multiplication. Third, the indexing scheme is very simple. Each index in Eq. 15-3 is found by adding or subtracting integer constants that can be calculated before the filtering starts (i.e., p and q). Fourth, the entire algorithm can be carried out with integer representation. Depending on the hardware used, integers can be more than an order of magnitude faster than floating point.Surprisingly, integer representation works better than floating point with this algorithm, in addition to being faster . The round-off error from floating point arithmetic can produce unexpected results if you are not careful. For example,imagine a 10,000 sample signal being filtered with this method. The last sample in the filtered signal contains the accumulated error of 10,000 additions and 10,000 subtractions. This appears in the output signal as a drifting offset.Integers don't have this problem because there is no round-off error in the arithmetic. If you must use floating point with this algorithm, the program in Table 15-2 shows how to use a double precision accumulator to eliminate this drift.。
三电平逆变器开关纹波与lcl滤波电感的关系

三电平逆变器开关纹波与lcl滤波电感的关系Switching Ripple in Three-Level Inverters and the Relationship with LCL Filter InductanceAs power electronics technology continues to advance,three-level inverters have gained popularity due to their advantages over traditional two-level inverters. One of the key considerations in the design and operation of three-level inverters is the presence of switching ripple. The switching ripple refers to the fluctuation or oscillationin voltage or current waveforms that occur during the switching process.我的主题是:三电平逆变器开关纹波与LCL滤波电感之间的关系随着功率电子技术的不断发展,三电平逆变器因其相较于传统二电平逆变器的优势而受到越来越多的关注。
在设计和运行三电平逆变器时,一个关键的考虑因素就是开关纹波的存在。
开关纹波指的是在开关过程中电压或电流波形出现的波动或振荡。
Switching ripple is an inherent characteristic of power electronic systems that results from the commutationprocess of the semiconductor switches. In three-level inverters, it manifests as high-frequency components superimposed on the desired low-frequency output waveform. The presence of switching ripple can lead to several undesirable effects such as increased harmonic distortion, increased stress on components, and decreased overallsystem efficiency.开关纹波是功率电子系统固有的特性,它源于半导体开关的换向过程。
保护眼睛的英语作文
保护眼睛的英语作文English Answer:Maintaining optimal eye health is paramount for preserving clear vision and overall well-being. Taking proactive measures to protect the eyes from various environmental and lifestyle factors can prevent or delay the onset of eye diseases.Reduce Exposure to Blue Light:Excessive exposure to high-energy visible (HEV) light emitted from electronic devices, such as smartphones, tablets, and computers, has been linked to digital eye strain and age-related macular degeneration (AMD). Consider using blue light filters on your devices, reducing screen time, and taking frequent breaks to minimize the impact on your eyes.Protect from UV Radiation:Ultraviolet (UV) rays from the sun can damage the cornea, lens, and retina. Wear sunglasses that block 100% of UV rays, especially during outdoor activities. Prolonged UV exposure increases the risk of cataracts, macular degeneration, and other eye conditions.Maintain a Healthy Diet:A diet rich in antioxidants, such as vitamins A, C, and E, supports eye health. Consume plenty of fruits, vegetables, and whole grains. Leafy greens, like spinach and kale, contain lutein and zeaxanthin, which protect against macular degeneration.Stay Hydrated:Staying adequately hydrated is crucial for maintaining healthy tear production. Tears wash away irritants and provide nutrients to the eyes. Drink plenty of water throughout the day to keep your eyes hydrated.Get Regular Eye Exams:Regular eye exams are essential for detecting and treating eye conditions early on. During these exams, an eye care professional checks for vision changes, eye diseases, and other eye health issues. Early detection and treatment can often prevent or minimize vision impairment.Practice Good Hygiene:Proper eye hygiene habits can help prevent eye infections. Avoid touching or rubbing your eyes, wash your hands frequently, and clean contact lenses or eyeglasses regularly. If you wear makeup around your eyes, remove it thoroughly before bed.Avoid Smoking:Smoking damages the blood vessels in the eyes, increasing the risk of cataracts, macular degeneration, and other eye diseases. Quitting smoking can significantly improve eye health and overall well-being.Manage Chronic Conditions:Certain chronic conditions, such as diabetes and hypertension, can affect eye health. It's important to manage these conditions proactively to minimize theirimpact on your eyes. Regular checkups and adherence to treatment plans are essential for protecting your vision.Protect from Injuries:Wear protective eyewear during sports or activities where there's a risk of eye injury. This includes safety glasses, goggles, or face shields. Eye injuries can cause serious damage, so it's crucial to take necessary precautions.中文回答:保护眼睛。
class monitor英语作文

class monitor英语作文1. Having a good monitor is essential for computer users.2. Monitors come in various sizes and resolutions.3. Some monitors are now equipped with curved screens fora more immersive experience.4. Ultra wide monitors are great for multitasking.5. Higher refresh rates on monitors are preferred by gamers.6. LED monitors are energy efficient and produce better colors.7. Many professional graphic designers use high quality monitors for color accuracy.8. Some monitors come with built in speakers for convenience.9. Touchscreen monitors are commonly used in interactive kiosks.10. 4K monitors have become popular for their clarity and sharpness.11. Monitors with HDR support offer better contrast and color accuracy.12. Be sure to adjust the monitor's settings for optimal viewing.13. Calibrating your monitor can improve color accuracy.14. It is important to position your monitor at eye level to reduce strain on your neck.15. Dual monitor setups are common for increased productivity.16. Monitors with adjustable stands are versatile and ergonomic.17. Some monitors offer blue light filters for reducedeye strain.18. Monitor sizes are measured diagonally from corner to corner.19. Dead pixels on a monitor can be distracting.20. Rotating monitors are useful for portrait orientation.21. Bezel less monitors provide a seamless viewing experience.22. Some monitors offer a USB C connection for easy docking.23. Monitor technology continues to evolve rapidly.24. A high quality monitor can enhance your overall computing experience.25. Consider the aspect ratio of a monitor before purchasing.26. Many monitors now support AMD FreeSync or NVIDIA G Sync for smoother gameplay.27. Mounting your monitor on a wall can save space on your desk.28. Screen tearing can be eliminated by using a monitor with adaptive sync technology.29. Adjusting the brightness and contrast of your monitor can reduce eye fatigue.30. Make sure to clean your monitor regularly to maintain its clarity.31. Some monitors have integrated webcam and microphone for video calls.32. Reading mode on monitors reduces blue light emission for comfortable reading.33. Gaming monitors often come with customizable RGB lighting.34. High end monitors offer wide color gamut for accurate color reproduction.35. Monitors with flicker free technology are great for extended use.36. Curved monitors provide a more immersive gaming experience.37. Integrated speakers on monitors can save desk space.38. Some monitors have a low blue light mode to reduce eye strain.39. Check the connectivity options of a monitor to ensure compatibility with your devices.40. Glossy monitors provide vibrant colors but are prone to glare.41. Matte screens reduce glare and reflections for better viewing in bright rooms.42. OLED monitors offer deep blacks and vibrant colors.43. Consider the response time of a monitor for fast moving visuals.44. IPS monitors have wide viewing angles for consistent colors from any angle.45. TN monitors are known for their fast response times but limited viewing angles.46. VA panels offer a balance between color accuracy and response time.47. Some monitors come with a blue light filter toprotect your eyes.48. Touchscreen monitors are commonly used in interactive displays.49. High dynamic range (HDR) monitors provide better contrast and color accuracy.50. Ultra wide monitors are great for immersive gaming experiences.51. Professional photographers often use high quality monitors for accurate color reproduction.52. Make sure to set the refresh rate of your monitor to match your GPU for smooth gameplay.53. Consider the aspect ratio of a monitor for different types of content.54. A good monitor stand can help you position your monitor ergonomically.55. Monitors with built in speakers can save you from cluttering your desk with external speakers.56. Bezel less monitors provide a more seamless viewing experience.57. Monitor technology is constantly improving with new features and advancements.58. A high resolution monitor can enhance the clarity of text and images.59. Adjusting the color temperature of your monitor can reduce eye strain.60. Curved monitors offer a more immersive viewing experience.61. Some monitors feature a USB hub for easy connectivity with other devices.62. Make sure to clean your monitor regularly to prevent dust accumulation.63. Integrated webcams on monitors are convenient for video conferencing.64. Energy efficient LED monitors consume less power than traditional displays.65. Higher refresh rates on monitors can reduce motion blur in fast paced games.66. Mounting your monitor on an adjustable arm can improve ergonomics.67. Consider the size of your monitor based on your desk space and usage requirements.68. Be sure to calibrate your monitor for accurate color reproduction.69. Dual monitor setups are popular for increased productivity in work environments.70. Ultra wide monitors are great for multitasking with multiple windows open.71. Some monitors have a low blue light mode for nighttime use.72. IPS panels provide vibrant colors and wide viewing angles.73. TN panels offer fast response times ideal for gaming.74. VA panels are known for their deep blacks and high contrast ratios.75. Monitors with HDR support offer better color accuracy and contrast.76. Integrated speakers on monitors can provide decent audio without external speakers.77. Touchscreen monitors are commonly used in interactive kiosks and displays.78. Be sure to adjust the brightness and contrast of your monitor to suit your preferences.79. Matte screens reduce reflections and glare for better viewing in well lit rooms.80. OLED monitors offer rich colors and deep blacks for a premium visual experience.81. Some monitors come with a flicker free technology to reduce eye strain.82. Gaming monitors often feature customizable RGB lighting for a personalized setup.83. High quality monitors can enhance the overall visual experience on your computer.84. Monitors with adaptive sync technology can eliminate screen tearing during gameplay.85. Bezel less monitors provide a seamless multi monitor setup with minimal distractions.86. Portable monitors are convenient for on the go use with laptops and mobile devices.87. Reading mode on monitors reduces blue light emission for comfortable reading at night.88. Some monitors offer a USB C connection for easy connectivity with modern devices.89. Curved monitors provide an immersive viewing experience for movies and games.90. Dual monitor stands help you position and set up two monitors side by side efficiently.91. Be sure to position your monitor at eye level to reduce strain on your neck and eyes.92. Desk mounts are great for adjusting the height andtilt of your monitor for an ergonomic setup.93. IPS monitors are popular for their color accuracy and wide viewing angles.94. TN monitors are known for their fast response times, ideal for gaming and fast paced content.95. VA panels offer a good balance between color accuracy and response time.96. Monitors with blue light filters are helpful for reducing eye strain during extended use.97. Consider the connectivity options of a monitor to ensure compatibility with your devices.98. Matte screens are recommended for reducing glare and reflections in bright environments.99. OLED monitors offer vibrant colors and deep blacks for a premium visual experience.100. Check the refresh rate and response time of a monitor for smooth gameplay and fast moving visuals.101. Be sure to clean your monitor regularly to maintain its clarity and performance.102. Some monitors have integrated webcams and microphones for video conferencing.103. Adjustable stands and mounts can help you position your monitor for optimal viewing comfort.104. High dynamic range (HDR) monitors offer improved contrast and color accuracy.105. Ultra wide monitors provide a more immersive gaming and movie watching experience.106. Professional grade monitors are essential for accurate color reproduction in design work.107. It is important to invest in a high quality monitor for a better overall computing experience.。
智能优化的代价评估粒子滤波算法

智能优化的代价评估粒子滤波算法王进花;曹洁;李伟【摘要】Aiming at the problem of low accuracy of state estimation of the particle filter (PF) algorithm with unknown noise,the intelligent optimization cost-reference particle filter (IOCRPF) algorithm is investigated.The intelligent optimization resampling strategy is designed based on the characteristics of the cost-reference particle filter (CRPF) algorithm.The probability mass function is used to evaluate the credibility of particles,and the crossover and mutation operations are used to guide the particles to move to the less risky areas.Therefore,it can improve the impoverishment of samples resulted from samples update based on risk and cost.And the posterior distribution area is extended through the mutation of the riskier particles.The simulation results show that the IOCRPF algorithm has superior performance of particle optimization and improves the accuracy of state estimation under the condition of unknown noise statistical characteristics.%针对噪声未知情况下粒子滤波算法进行状态估计时准确性低的问题,对智能优化的代价评估粒子滤波算法进行研究.结合代价评估粒子滤波算法特点设计了智能优化重采样策略,利用概率质量函数评价粒子的可信度,通过交叉变异操作引导粒子向风险较小的区域移动,改善基于风险和代价进行样本更新而导致的样本贫乏问题;通过对风险较大粒子的变异,扩展了粒子的后验分布区域.仿真结果表明,提出的智能优化代价评估粒子滤波算法具有良好的粒子优化性能,能在噪声统计特性未知情况下提高状态估计的精度.【期刊名称】《系统工程与电子技术》【年(卷),期】2017(039)012【总页数】6页(P2857-2862)【关键词】粒子滤波;代价评估粒子滤波;未知噪声;重采样【作者】王进花;曹洁;李伟【作者单位】兰州理工大学电气工程与信息工程学院,甘肃兰州730050;兰州理工大学电气工程与信息工程学院,甘肃兰州730050;兰州理工大学电气工程与信息工程学院,甘肃兰州730050【正文语种】中文【中图分类】TP391粒子滤波(particle filter, PF)是一种递归贝叶斯估计方法,其基于蒙特卡罗采样思想近似计算无法解析的非线性积分问题,通过一个赋予相应权值信息的粒子集合来近似真实的后验密度函数,并通过重要性采样和重采样步骤对粒子集合进行传递和更新[1-3]。
净化方案英文

Purification SolutionPurification refers to the process of removing impurities or contaminants from a substance, object, or environment in order to make it cleaner, healthier, and safer. In this document, we will discuss various purification solutions and their effectiveness in different scenarios.1. Air Purification1.1. HEPA FiltersHigh Efficiency Particulate Air (HEPA) filters are widely used in air purifiers to remove airborne pollutants such as dust, pollen, pet dander, and smoke. These filters can capture particles as small as 0.3 microns with an efficiency of 99.97%. HEPA filters are highly effective in improving air quality and are recommended for individuals with allergies or respiratory conditions.1.2. Activated Carbon FiltersActivated carbon filters are designed to remove volatile organic compounds (VOCs), odors, and chemical contaminants from the air. These filters work by adsorbing the impurities onto the porous surface of activated carbon. Activated carbon filters are commonly used in combination with HEPA filters to provide comprehensive air purification.1.3. Ultraviolet Germicidal Irradiation (UVGI)UVGI is a disinfection method that uses ultraviolet (UV) light to destroy microorganisms such as bacteria, viruses, and mold spores. UVGI systems are often installed in HVAC (Heating, Ventilation, and Air Conditioning) systems to prevent the spread of airborne diseases. It is important to note that UVGI is ineffective against particles or allergens, and should be used in conjunction with air filters for optimal air quality.2. Water Purification2.1. Reverse Osmosis (RO)Reverse osmosis is a water purification process that uses a semi-permeable membrane to remove ions, molecules, and larger particles from drinking water. RO systems effectively remove contaminants such as heavy metals, arsenic, fluoride, and nitrate. However, they can also remove beneficial minerals, so it is important to remineralize the water after purification.2.2. Activated Carbon FiltersActivated carbon filters are commonly used in water purifiers to remove organic compounds, chlorine, and unpleasant odors from tap water. These filters work by adsorbing the impurities onto the surface of activated carbon. While activated carbon filters are effective in improving the taste and odor of water, they may not be sufficient to remove certain contaminants.2.3. Ultraviolet (UV) DisinfectionUV disinfection is a chemical-free method used to kill or inactivate microorganisms in water. UV light damages the DNA or RNA of microorganisms, preventing them from reproducing. UV disinfection is commonly used as an additional step in water treatment to ensure the absence of harmful bacteria and viruses.3. Surface Purification3.1. DisinfectantsDisinfectants are chemicals that are used to kill or inhibit the growth of microorganisms on surfaces. Common disinfectants include alcohol-based solutions, hydrogen peroxide, and bleach. It is important to follow the manufacturer’s instructions for proper use and dilution of disinfectants to ensure effective disinfection.3.2. Steam CleaningSteam cleaning is an eco-friendly and chemical-free method for surface purification. It uses hot steam to kill bacteria, allergens, and mold on various surfaces such as floors, carpets, and upholstery. Steam cleaning is effective in removing stains, odors, and germs, making it a popular choice for households with children or individuals with allergies.3.3. Ultraviolet (UV) SterilizationUV sterilization is a non-chemical method for killing or inactivating microorganisms on surfaces. UV light damages the DNA or RNA of microorganisms, preventing them from reproducing. UV sterilization is commonly used in healthcare settings to disinfect medical equipment, but it can also be used in households for surface purification.In conclusion, purification solutions play a crucial role in maintaining clean and healthy environments. Whether it’s air, water, or surfaces, understanding the different purification methods and their effectiveness is essential for creating a safe and pleasant living or working environment.。
优化卡尔曼滤波算法中的目标函数选择

万方数据万方数据万方数据万方数据优化卡尔曼滤波算法中的目标函数选择作者:王建文, 税海涛, 马宏绪, 李迅, 刘述田, WANG Jian-wen, SHUI Hai-tao, MA Hong-xu, LI Xun, LIU Shu-tian作者单位:王建文,税海涛,马宏绪,李迅,WANG Jian-wen,SHUI Hai-tao,MA Hong-xu,LI Xun(国防科技大学机电工程与自动化学院,湖南,长沙,410073), 刘述田,LIU Shu-tian(91065部队教研部,辽宁,葫芦岛,125001)刊名:系统工程与电子技术英文刊名:SYSTEMS ENGINEERING AND ELECTRONICS年,卷(期):2009,31(1)引用次数:0次参考文献(18条)1.Kalman R E A new approach to linear filtering and prediction problems 1960(Series D)2.Kalman R E.Bucy R S New methods and results in linear filtering and prediction theory 1961(Series D)3.邓自立自校正滤波理论及其应用--现代时间序列分析方法 20034.Mehra R K On the identification of variances and adaptive Kalman filtering 1970(02)5.周东华.席裕庚.张钟俊一种带多重次优渐消因子的扩展卡尔曼滤波器 1991(06)6.Chen G.Chui C K A modified adaptive Kalman filter for realtime applications 1991(01)7.Xie L.Sob Y C.de-Souza C E Robust Kalman filtering for uncertain discrete-time systems 1994(06)8.Shen X.Deng L Game theory approach to discrete H∞ filter design 1997(04)9.Chaer W S.Bishop R H.Ghosh J A mixture-of-experts framework for adaptive Kalman filtering 1997(03)10.Katsikas S K.Likothanassis S D.Beligiannis G N Genetically determined variable structure multiple model estimation 2001(10)11.Mazor E.Averbueh A.Bar-Shalom Y Interacting multiple model in target tracking:a survey 1998(01)12.Li X.Bar-Shalom Y Multiple-model estimation with variable structure 1996(04)13.Athans M.Wishner R P.Bertolini A Suboptimal state estimation for continuous-time nonlinear systems from discrete noisy measurements 1968(05)14.Julier S J.Uhlmann J K.Durrant-Whyte H F A new method for the nonlinear transformation of means and eovariances in filters and estimators 2000(03)15.Ito K.Xiong K Q Ganssian filters for nonlinear filtering problems 2000(05)16.Nogaard M.Poulsen N K.Ravn O New developments in state estimation for nonlinear systems 2000(11)17.王建文.韩大鹏.马宏绪一种新的SPKF算法--GSPKF算法[期刊论文]-系统仿真学报 2008(04)18.Gustafsson F.Gunnarsson F.Bergman N Particle filters for positioning,navigation and tracking2002(02)相似文献(0条)本文链接:/Periodical_xtgcydzjs200901045.aspx下载时间:2010年6月1日。
高效全自动喷头清洗机 说明书

高效全自动喷头清洗机使用说明书PULSE JET NOZZLE WASHER MANUAL EASYCHANNEL COMPANY LIMITED高效全自动喷头清洗机使用说明书高效全自动喷头清洗机,采用先进的液晶和液位控制技术来实现全自动工作。
使用高效超声波来分解喷头堵塞物,并采用高速射流在超声波工作的同时对喷头中的堵塞物进行及时清理,从而达到最佳的疏通效果。
是清洗,维修喷头的理想设备。
工作流程及原理:技术参数:电源:AC220V 50HZ最大功率:100W清洗液罐容量:1.5L清洗液可加热温度:40℃适应喷头尺寸:120MM(宽)80MM(高)30MM(厚)以内的喷头。
使用方法:一、作业前的准备工作1、打开机箱后面的门,将清洗液罐上面的几根管子松开或拔出,松开罐子左右下端的搭扣,然后将罐拿出来。
将罐清洗干净。
2、准备好约1.5升待清洗喷头适用的清洗液,倒入罐中,将盖子扣紧,然后将罐子放回机箱内,扣好左右下端的搭扣,然后将管全部接好。
(特别注意:各个管接头一定要可靠拧紧,以防清洗液渗漏!)3、将喷头夹具取出,方法是:左手拿住夹具,右手松开蝶形螺丝,即可轻轻取出喷头夹具。
4、将要清洗的喷头接好随机附送的接管(接好后接管要自由向上),然后将喷头贴紧靠放在夹具的下边,用四方的环形夹具套住喷头,拧紧后面的螺丝将喷头夹紧。
然后,将放好喷头的夹具放回清洗机内上方的安装支架管上,调整好高度后锁紧,让喷嘴刚好处于清洗槽内距离工作台面板约2CM处。
(以清洗液刚好可以完全浸没喷嘴为准)4、将喷头上的接管和清洗槽工作台面板上的接管自然对接牢固。
5、将没有用到的接管小心放在清洗槽内,不得有任何空管放在清洗槽外,以免发生清洗液流出清洗槽之外的重大事故!6、认真做好关键部件的例行检查:打开机箱后门,进行以下检查步骤:(1、过滤器及各种管接头要连接良好,不允许有任何松动现象。
(2、查看有无其他异常情况二、开机、设定各种参数及自动清洗喷头打开电源开关,机内的灯光立即工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Nadja S. Magalh˜ aes
Instituto Nacional de Pesquisas Espaciais C.P. 515, S˜ ao Jos´ e dos Campos - SP, 12201-970, BRAZIL
III. QUASI-MONOCHROMATIC SIGNALS
˜ (ω ) is well behaved. For example, if U (t) were a strictly Equation (2) is valid as long as U monochromatic wave like U (t) = h0 cos ω0 t, ˜ (ω ) = h0 δ (ω − ω0 ). it would be difficult to build this filter since U In order to use the optimal filter (2) in continuous gravitational wave detectors we will describe these waves as quasi-monochromatic useful signals. It means that the waves that reach the antenna will be of the form3 hxx (t) =
gravitational wave context yet.
II. THE FILTER THAT OPTIMIZES SNR
Linear, stationary filters obey the relation O(t) =
∞ −∞
k (t′ )I (t − t′ )dt′ .
k (t) is the impulse response function that characterizes the filter K , I (t) is the input at the filter and O(t) is the filter output. Generally1 I (t) has a useful part, U (t), and an unwanted part, N (t): I (t) = U (t) + N (t). We have a similar relation for the filter output, given by O(t) = U ′ (t) + N ′ (t). It is well known from noise theory [7] that the filter Ko that optimizes SNR at its output2 , SNR ≡ must have the following transfer function: Ko (ω ) = e−ıωt0 with Ko ≡
(4)
) ,t ≥ 0 2h0 e−at cos(ω0 t + π 4 2h0 e cos(ω0 t +
at π ) 4
,
πa , 2
(5)
,t ≤ 0 and the
The constant a is related to the signal spectral density bandwidth, ∆ωh = corresponding spectral density is of the form4 Sh ( ω ) = h2 2a 2a 0 . + 2 2 2 2 a + (ω − ω0 ) a + (ω + ω0 )2
arXiv:gr-qc/9312005v1 2 Dec 1993
Carlos O. Escobar
Instituto de F´ ısica Universidade de S˜ ao Paulo C.P. 20516, S˜ ao Paulo - SP, 01452-990, BRAZIL
Abstract
We determine the transfer functions of two kinds of filters that can be used in the detection of continuous gravitational radiation. The first one optimizes the signal-to-noise ratio, and the second reproduces the wave with minimum error. We analyse the behaviour of these filters in connection with actual detection schemes.
1
I. INTRODUCTION
The detection of gravitational waves (g.w.) is one of the most fascinating and challenging subjects in Physics research nowadays. Besides checking the General Relativity theory, the detection of this phenomenon will mark the beginning of a new phase in the comprehension of astrophysical phenomena by the use of gravitational wave astronomy. Although these waves were predicted at the beginning of the century [1], the research on their detection only started around 1960, with the studies of Joseph Weber [2]. The major obstacle to this detection is the tiny amplitude the g.w. have [3]. Even though the more sensitive detector now operating [4] is capable to detect amplitudes near h ∼ 5 × 10−19 , this value must be decreased by several orders of magnitude so that impulsive waves can be detected regularly. On the other hand, the discovery of pulsars with periods lying in the milliseconds range stimulated the investigations on the detection of gravitational waves of periodic origin. Although these waves generally have amplitudes even smaller than those emitted by impulsive sources, periodic sources are continuously emitting gravitational waves in space and they can be detected as soon as the correct sensitivity is reached. Since many of the resonant mass antennae now operating are designed to detect frequencies near 1000 Hz, the millisecond pulsars will probably be detected if these antennae ever become sensitive to amplitudes h ≤ 10−27 . This value is bigger if we consider the Crab pulsar (f ∼ 60Hz ): h ∼ 10−24 . There is a resonant mass detector with a torsional type antenna (CRAB IV) being developed by the Tokyo group [5] to detect gravitational waves emitted by the Crab pulsar. This group expects to reach h ∼ 10−22 soon. The main purpose of this paper is a contribution towards the increase in sensitivity of resonant mass continuous gravitational wave detectors looking at the use of adequate filters. We study two kinds of filters, the first optimizes the signal-to-noise ratio (SNR), and is normally used in the detection of impulsive waves [6]. The second filter reproduces the wave with minimum error. Both filters apparently were not investigated in the continuous 2