热释电传感器英中文翻译(毕业设计、课程设计)
光电传感器(中英文对照版)

Photoelectric sensorKey word: photoelectric effect photoelectric element photoelectric sensor classification sensor application characteristics .Abstract: in the rapid development of science and technology in the modern society, mankind has into the rapidly changing information era, people in daily life, the production process, rely mainly on the detection of information technology by acquiring, screening and transmission, to achieve the brake control, automatic adjustment, at present our country has put detection techniques listed in one of the priority to the development of science and technology. Because of microelectronics technology, photoelectric semiconductor technology, optical fiber technology and grating technical development makes the application of the photoelectric sensor is growing. The sensor has simple structure, non-contact, high reliability, high precision, measurable parameters and quick response and more simple structure, form etc, and flexible in automatic detection technology, it has been widely applied in photoelectric effect as the theoretical basis, the device by photoelectric material composition. Text:First, theoretical foundation - photoelectric effectPhotoelectric effect generally have the photoelectric effect, optical effect, light born volts effect.The light shines in photoelectric material, according to the electronic absorption material surface energy, if absorbed energy large enough electronic electronic will overcome bound from material surface and enter the outside space, which changes photoelectron materials, this kind of phenomenon become the conductivity of the photoelectric effectAccording to Einstein's photoelectron effect, photon is moving particles, each photon energy for hv (v for light frequency, h for Planck's constant, h = 6.63 * 10-34 J/HZ), thus different frequency of photons have different energy, light, the higher the frequency, the photon energy is bigger. Assuming all the energy photons to photons, electronic energy will increase, increased energy part of the fetter, positive ions used to overcome another part of converted into electronic energy. According to the law of conservation of energy:Type, m for electronic quality, v for electronic escaping the velocity, A microelectronics the work done.From the type that will make the optoelectronic cathode surface escape the necessary conditions are h > A. Due to the different materials have different escaping, so reactive to each kind of cathode materials, incident light has a certain frequency is restricted, when the frequency of incident light under this frequency limit, no matter how the light intensity, won't produce photoelectron launch, this frequency limit A -h m 212νν=called "red limit". The corresponding wavelength for type, c for the speed of light, A reactive for escaping.When is the sun, its electronic energy, absorb the resistivity reduce conductive phenomenon called optical effects. It belongs to the photoelectric effect within. When light is, if in semiconductor electronic energy big with semiconductor of forbidden band width, the electronic energy from the valence band jump into the conduction band, form, and at the same time, the valence band electronic left the corresponding cavities. Electronics, cavitation remained in semiconductor, and participate in electric conductive outside formed under the current role.In addition to metal outer, most insulators and semiconductor have photoelectric effect, particularly remarkable, semiconductor optical effect according to the optoelectronics manufacturing incident light inherent frequency, when light resistance in light, its conductivity increases, resistance drops. The light intensity is strong, its value, if the smaller, its resistance to stop light back to the original value. Semiconductor produced by light illuminate the phenomenon is called light emf, born volts effect on the effect of photoelectric devices have made si-based ones, photoelectric diode, control thyristor and optical couplers, etc.Second, optoelectronic components and characteristicsAccording to the outside optoelectronics manufacturing optoelectronic devices have photoelectron, inflatable phototubes and photoelectric times once tube.1. Phototubes phototubes are various and typical products are vacuum phototubes and inflatable phototubes, light its appearance and structure as shown in figure 1 shows, made of cylindrical metal half cathodic K and is located in the wires cathodic axis of anode in A package of smoke into the vacuum, when incident light within glass shell in the cathode, illuminate A single photon took all of its energy transfer to the cathode materials A free electrons, so as to make the freedom electronic energy increase h. When electrons gain energy more than escape of cathode materials, it reactive A metal surface constraints can overcome escape, form electron emission. This kind of electronic called optoelectronics, optoelectronic escaping the metal surface for after initial kinetic energyPhototubes normal work, anode potential than the cathode, shown in figure 2. In one shot more than "red light frequency is premise, escape from the optoelectronic cathode surface by positive potential attracted the anode in photoelectric tube forming space, called the current stream. Then if light intensity increases, the number of photons bombarded the cathode multiplied, unit of time to launch photoelectron number are also increasing, photo-current greatens. In figure 2 shows circuit, current and resistance is the voltage drop across the only a function of light intensity relations, so as to achieve a photoelectric conversion. When the LTT optoelectronic cathode K, electronic escape from the cathode surface, and was the photoelectric anode is an electric current, power plants absorb deoxidization device in the load resistance - I, the voltagePhototubes photoelectric characteristics fig.03 shows, from the graph in flux knowable, not too big, photoelectric basic characteristics is a straight line.2. Photoelectric times had the sensitivity of vacuum tube due to low, so with people developed has magnified the photomultiplier tubes photo-current ability. Figure 4 is photomultiplier tube structure schematic drawing.图4光电倍增结构示意图From the graph can see photomultiplier tubes also have A cathode K and an anode A, and phototubes different is in its between anode and cathode set up several secondary emission electrodes, D1, D2 and D3... They called the first multiply electrode, the second multiply electrode,... Usually, double electrode for 10 ~ 15 levels. Photomultiplier tubes work between adjacent electrode, keeping a certain minimum, including the cathode potential potentials, each multiply electrode potential filtering increases, the anode potential supreme. When the incident light irradiation, cathodic K escape from the optoelectronic cathode multiplied by first accelerated, by high speed electrode D1 bombarded caused secondary electron emission, D1, an incident can generate multiple secondary electron photonics, D1 emit of secondary electron wasD1, D2 asked electric field acceleration, converged on D2 and again produce secondary electron emission... So gradually produce secondary electron emission, make electronic increased rapidly, these electronic finally arrived at the anode, form a larger anode current. If a n level, multiply electrodes at all levels for sigma, the multiplication of rate is the multiplication of photomultiplier tubes can be considered sigma n rate, therefore, photomultiplier tube has high sensitivity. In the output current is less than 1mA circumstances, it in a very wide photoelectric properties within the scope of the linear relationship with good. Photomultiplier tubes this characteristic, make it more for light measurement.3 and photoconductive resistance photoconductive resistance within the working principle is based on the photoelectric effect. In semiconductor photosensitive material ends of mount electrode lead, it contains transparent window sealed in the tube and shell element photoconductive resistance. Photoconductive resistance properties and parameters are:1) dark resistance photoconductive resistance at room temperature, total dark conditions stable resistance called dark resistance, at the current flow resistance is called dark current.2) light resistance photoconductive resistance at room temperature and certain lighting conditions stable resistance measured, right now is called light resistance of current flow resistance is called light current.4, volt-ampere characteristics of both ends photoconductive resistance added voltage and current flows through photoconductive resistance of the relationship between called volt-ampere characteristics shown, as shown in figure 5. From the graph, the approximate linear volt-ampere characteristics that use should be limited, but when the voltage ends photoconductive resistance, lest than shown dotted lines of power consumption area5, photoelectric characteristics photoconductive resistance between the poles, light when voltage fixed the relationship between with bright current photoelectric characteristics. Called Photoconductive resistance photoelectric characteristics is nonlinear, this is one of the major drawback of photoconductive resistance.6, spectral characteristics is not the same incident wavelength, the sensitivity of photoconductive resistance is different also. Incidence wavelength and photodetector the relationship between relative sensitivity called spectral characteristics. When used according to the wavelength range by metering, choose different material photoconductive resistance.7, response time by photoconductive resistance after photo-current need light, over a period of time (time) rise to reach its steady value. Similarly, in stop lightphoto-current also need, over a period of time (down time) to restore the its dark current, this is photoconductive resistance delay characteristics. Photoconductive resistance rise response time and falling response time about 10-1 ~ 10-3s, namely the frequency response is 10Hz ~ 1000Hz, visible photoconductive resistance cannot be used in demand quick response occasion, this is one of the main photoconductive resistance shortcomings.8 and temperature characteristic photoconductive resistance by temperature affects greatly, temperature rise, dark current increase, reduced sensitivity, which is another photoconductive resistance shortcomings.9, frequency characteristic frequency characteristics refers to an external voltage and incident light, strong must be photo-current I and incident light modulation frequency, the relationship between the f, photoelectric diode is the frequency characteristic of the photoelectric triode frequency characteristics, this is because of the photoelectrictriode shot "yankees there capacitance and carrier base-combed need time's sake. By using the principle of the photoelectric efficiency of optoelectronics manufacturing frequency characteristics of the worst, this is due to capture charge carriers and release charge need a certain time's sake.Three, photoelectric sensorsPhotoelectric sensor is through the light intensity changes into electrical signal changes to achieve control, its basic structure, it first figure 6 by measuring the change of change of converting the light signal, and then using photoelectric element further will light signals into electrical signal by photoelectric sensor general. Illuminant, optical path and optoelectronics. Three components of photoelectric detection method has high precision, fast response, non-contact wait for an advantage, but measurable parameters of simple structure, sensors, form flexible, therefore, photoelectric sensor in the test and control is widely used.By photoelectric sensor generally is composed of three parts, they are divided into: transmitter and receiver and detection circuit shown, as shown in figure 7, transmitter aimed at the target launch beam, the launch of the beam from semiconductor illuminant, general light emitting diode (LED), laser diode and infrared emission diode. Beam uninterrupted launch, or change the pulse width. Receivers have photoelectric diode, photoelectric triode, composed si-based ones. In front of the receiver, equipped with optical components such as lens and aperture, etc. In its back is detection circuit, it can filter out effective signal and the application of the signal. In addition, the structural components in photoelectric switch and launch plate and optical fiber, triangle reflex plate is solid structure launch device. It consists of small triangle cone of reflective materials, can make a beam accurately reflected back from plate, with practical significance. It can be in with the scope of optical axis 0 to 25, make beams change launch Angle from a root almost after launch line, passes reflection or from the rotating polygon.some basic returns.图7Photoelectric sensor is a kind of depend on is analyte and optoelectronics and light source, to achieve the relationship between the measured purpose, so the light source photoelectric sensor plays a very important role, photoelectric sensor power if a constant source, power is very important for design, the stability of the stability of power directly affect the accuracy of measurement, commonly used illuminant have the following kinds:1, leds is a change electric energy into light energy semiconductor devices. It has small volume, low power consumption, long life, fast response, the advantages of high mechanical strength, and can match and integrated circuits. Therefore, widely used in computer, instruments and automatic control equipment.2, silk light bulb that is one of the most commonly used illuminant, it has rich infrared light. If chosen optoelectronics, constitutes of infrared sensor sensitive colour filter can be added to the visible tungsten lamps, but only filter with its infrared does illuminant, such, which can effectively prevent other light interference.3, compared with ordinary light laser laser with energy concentration, directional good, frequency pure, coherence as well as good, is very ideal light sources.The light source, optical path and photoelectric device composition photoelectric sensor used in photoelectric detection, still must be equipped with appropriate measurement circuit. The photoelectric effect to the measurement circuit of photoelectric element of widerange caused changes needed to convert the voltage or current. Different photoelectric element, the measurement circuit required is not identical also. Several semiconductor introduces below optoelectronic devices commonly used measurement circuit.Semiconductor photoconductive resistance can through large current, be in so usually, need not equipped with amplifier. In the output power of demand is bigger, can use figure 8 shows circuit.Figure 9 (a) with temperature compensation given the photosensitive diode bridge type measuring circuit. When the incident light intensity slow change, the reverse resistance photosensitive diode is the slow change, the change of the temperature will cause the bridge output voltage, must compensate. Drift Picture a photosensitive diode as the test components, another into Windows, in neighboring bridge, the change of the temperature in the arms of the influence of two photosensitive diode, therefore, can eliminate the same output with temperature bridge road drift.Light activated triode incident light in work under low illumination, or hope to getbigger output power, also can match with amplifying circuit, as shown in figure 9 shows.Because even in the glare photosensitive batteries, maximum output voltage also only 0.6 V, still cannot make the next level 1 transistor have larger current output, so must add positive bias, as shown in figure 9 (a) below. In order to reduce the transistor circuit impedance variations, base si-based ones to reduce as much as possible without light, when the reverse bias inherit in parallel a resistor si-based ones at both ends. Or like figure 9 (b) as shown by the positive ge diode produces pressure drop and test the voltage produced when exposed to light, make silicon tube e stack, b the voltage between actuators than 0.7 V, and conduction work. This kind of circumstance also can use silicon light batteries, as shown in figure 10 (c) below. Semiconductor photoelectric element of photoelectric circuit can also use integrated operational amplifier. Silicon photosensitive diode can be obtained by integratingop-amp larger output amplitude, as shown in figure 11 (a) below. When light is produced, the optical output voltage in order to guarantee photosensitive diode isreverse biased, in its positive to add a load voltage. Figure 11. (b) give the photocell transform circuit, because the photoelectric si-based ones short-circuit current and illumination of a linear relationship between, so will it up in the op-amp is,inverse-phase input, using these two potential difference between the characteristicsof close to zero, can get better effect. In the picture shows conditions, the output voltageThe photoelectric element by flux the role of different made from the principle of optical measurement and control system is varied, press the photoelectric element (optical measurement and control system) output nature, namely, can be divided into second analog photoelectric sensor and pulse (switch) photoelectric sensor. Analog photoelectric sensors will be converted into continuous variation of the measure, it is measured optical with a single value relations between analog photoelectric sensor. According to be measured (objects) method detection of target can be divided into transmission (absorption) type, diffuse type, shading type (beam resistance gears) three categories. So-called transmission style means the object to be tested in optical path in constant light source, the light energy through things, part of being measured by absorption, transmitted light onto photoelectric element, such as measured liquid, gas transparency and photoelectric BiSeJi etc; speed.gratifying The so-called diffuse style means the constant light by the light onto the analyte from the object to be tested, and projected onto surfaces reflect on after optoelectronic devices, such as photoelectric colorimetric thermometer and light gauge etc; The so-called shading style means the when illuminant issued by the flux of light analyte covered by a part Jing optoelectronics, make projection on the flux change, change the object to be tested and extent of the position with the light path, such as vibration measurement, the size measurement; And in pulse photoelectric sensor in the sensors, photoelectric element acceptable optical signal is intermittent change, therefore photoelectric element in switch work of the state, the current output it is usually only two steady state of the signal, the pulse form used for photoelectric counting and photoelectric speed measurement and so on.And infrared photoelectric sensor classification and working way generally have thefollowing kinds:1, groove photoelectric sensor put a light emitter and a receiver in a slot face-to-face outfit are on opposite sides of the photoelectric groove. Lighter emits infrared light or visible light, and in unimpeded cases light receptors can receive light. But when tested objects from slot zhongtong obsolete, light occluded, photoelectric switches and action. Output a switch control signal, cut off or connect load current, thus completing a control movement. Groove switch is the overall of detection distance because general structure limits only a few centimeters.2, DuiShe type optoelectronic sensor if you put lighter and receive light is separated, can make the detection distance increase. By a lighter and an inbox light sensor into a photoelectric switch is called DuiShe separate photoelectric switches, referred to DuiShe photoelectric switch. Its detection distance can reach a few meters and even a dozen meters. When using light-emitting device and receive light device are installed in test object through the path of the sides, test object by blocking light path, accept light implement action output a switch control signals.3, reflex plate.it photoelectric switch light-emitting device type and receive light device into the same device inside, in its front pack a reflex plate.the using the reflection principle of complete photoelectric control function is called reflex plate.it reflex (or reflector reflex) photoelectric switch. Under normal circumstances, lighter the light reflected by reflex plate.it is received by accept light; Once the light path be test object to block, accept light, the light is not receive photoelectric switch is action, output a switch control signals.4, diffusion reflective photoelectric switches its detection head with a lighter and also an inbox light ware, but no reflex plate.it ahead. Normally lighter for the light collect light is not found. When test object by blocking the light, and the light reflected light, receive part implement received light signals, output a switch signals.Four, I'm the idea of photoelectric sensorWith the development of science and technology people on measuring accuracy had the higher request, this has prompted the pace with The Times photoelectric sensor have updated, improve the main means photoelectric sensor performance is the application of new materials, new technology manufacturing performance is more superior photoelectric element. For example, today the prototype of the photoelectric sensor is a small metal cylindrical equipment, with a calibration lens, transmitter into receiver focused light, the receiver out of cable to the device got a vacuum tube amplifiers in metal cylinder on the incandescent light bulb inside a small as the light source a strong incandescent lamp sensor. Due to the sensor various defects existing in the fields, gradually faded. To appear, because of it of fiber of excellent performance, then appeared with sensors supporting the use of optical passive components, another fiber without any interference of electromagnetic signal, and can make the sensor of the electronic components and other electrical disturbance in isolation. Have a piece of plastic optical fiber core or glass light core, light outside a metallic core skins and bread this layer metal cortical density lower than light core, so low, the beam refraction in the two materials according to the border (incident Anglewithin a certain range, reflected), is all. Based on optical principle, all beams can be made by optical fiber to transmission. Two incident beam Angle in an Angle (along the fiber length direction within) by multiple reflections from the other end after injection, another incident angles than accept the incident light in metal skin, loss. This accept Angle within the biggest incident Angle than two times, this is because fiber slightly larger from air into density larger fiber materials hitting may have a slight refraction. In light of the optical fiber transmission from inside the influence of fiber bending (whether more than bending radius minimal bending radius). Most optical fiber is flexible, easy to install in the narrow space. Photoelectric sensor is a kind of non-contact measurement small electronic measurement equipment, rely on detect its receives the light intensity change, to achieve measurement purposes, andit's also a vulnerable to external disturbance and lose the measurement accuracy of the device. When be being designed so besides the choice optoelectronic components, still must set GSCC signal and temperature compensating measures used to weaken or eliminate the impact of these factors.Photoelectric sensor must pass a light modulation, like radio waves of light modulation of sends and receives, the radio to a station, can ignore other radio signal sensors without modulation long-focal-length only through the use of mechanical shielded, scenes that receiver transmitter only can receive the emission of light, can make its energy becomes very high. In contrast, through modulation transceivers can ignore ambient light, only to own light or with the same modulation frequencies of light without modulation response. The sensor used to test the infrared rays or around the radiation, if just baked red bottle, in this application situation if use other sensor, may be incorrect actions.Photoelectric sensor due to non-contact, high reliability, etc, and to change in measurement, damage the object to be testedSo since its invention in fields since play a significant role, at present it has been widely used in measuring mechanical quantity, thermal quantity, weight, intelligent vehicle system into etc. Now it in power system automatically grid device plays a very important role, because generator input power grid operation often USES accurate with law, must meet: three-phase line sequence is consistent, frequency, phase agree unanimously, voltage amplitude equal, one of the conditions in system design has been satisfied, after three conditions must also meet to grid, of course, artificially grid is more difficult, photoelectric grid is easier.The development of times, science and technology in the update, photoelectric sensor types are increasing and application domain more and more widely, such as a recent kind of infrared already in intelligent vehicle electrical sensors in to the application, one of which had based on infrared sensor is the core of intelligent vehicle, reflective type infrared sensor using reflex infrared sensor design path detection module and speed monitoring module; Another method based on infrared sensor using the car tracing is to collect infrared sensor data.Photoelectric sensor has cannot be replaced by other sensors superiority, so it development foreground is very good, the application will also become more widespread.光电传感器关键字:光电效应 光电元件 光电特性 传感器分类 传感器应用 摘要:在科学技术高速发展的现代社会中,人类已经入瞬息万变的信息时代,人们在日常生活,生产过程中,主要依靠检测技术对信息经获取、筛选和传输,来实现制动控制,自动调节,目前我国已将检测技术列入优先发展的科学技术之一。
热释电传感器课程设计总结报告(1)

热释电传感器课程设计总结报告(1)
热释电传感器课程设计总结报告
一、课程目标
本课程旨在使学生了解热释电传感器的基本原理、特性、应用和设计方法,培养学生分析和解决实际问题的能力,提高学生的自主学习和实践能力。
二、教学内容
本课程主要包括以下内容:
1. 热释电效应的基本原理和实验验证。
2. 热释电传感器的结构和工作原理。
3. 热释电传感器的特性和参数。
4. 热释电传感器的应用及其优缺点。
5. 热释电传感器的设计方法和实验方案。
6. 热释电传感器的参数测试和分析。
三、教学方法
本课程采用理论讲授、实验演示、课堂讨论、实验报告等教学方法相结合,旨在帮助学生理论与实践相结合,掌握热释电传感器的基本知识和设计方法。
四、教学效果
通过本课程的学习,学生深入了解了热释电传感器的原理、特性和应用,掌握了热释电传感器的设计方法和实验方案,具备了一定的独立分析和解决实际问题的能力。
在实验室实践中,他们积极思考,认真实践,成功设计并测试出热释电传感器,获得了较好的实验结果。
最终,学生通过实验报告的撰写,深化了热释电传感器的理解,同时提
高了他们的分析、表达和写作能力。
五、改进意见
在教学过程中,应更多地引导学生参与实验设计和实践操作,使学生掌握更多的实际技能。
同时,在考核方面,可以增加对学生现场操作和技能演示的要求,以更好地评估其实际操作和技能水平。
毕业设计英文翻译----智能热能表控制器

外文资料与中文翻译外文资料:Intelligent thermal energy meter controllerAbstractA microcontroller based, thermal energy meter cum controller (TEMC) suitable for solar thermal systems has been developed. It monitors solar radiation, ambient temperature, fluid flow rate, and temperature of fluid at various locations of the system and computes the energy transfer rate. It also controls the operation of the fluid-circulating pump depending on the temperature difference across the solar collector field. The accuracy of energy measurement is ±1.5%. The instrument has been tested in a solar water heating system. Its operation became automatic with savings in electrical energy consumption of pump by 30% on cloudy days.1 IntroductionSolar water heating systems find wide applications in industry to conserve fossil fuel like oil, coal etc. They employ motor driven pumps for circulating water with on-off controllers and calls for automatic operation. Reliability and performance of the system depend on the instrumentation and controls employed. Multi-channel temperature recorders, flow meters, thermal energy meters are the essential instruments for monitoring and evaluating the performance of these systems. A differential temperature controller (DTC) is required in a solar water heating system for an automatic and efficient operation of the system. To meet all these requirements, a microcontroller based instrument was developed. Shoji Kusui and Tetsuo Nagai [1] developed an electronic heat meter for measuring thermal energy using thermistors as temperature sensors and turbine flow meter as flow sensor.2 Instrument detailsThe block diagram of the microcontroller (Intel 80C31) based thermal energy meter cum controller is shown in Fig. 1. RTD (PT100, 4-wire) sensors are used for the temperature measurement of water at the collector field inlet, outlet and in the tank with appropriate signal conditioners designed with low-drift operational amplifiers. A precision semiconductor temperature sensor (LM335) is used for ambient temperature measurement. A pyranometer, having an output voltage of 8.33 mV/kW/m2, is used for measuring the incident solar radiation. To monitor the circulating fluid pressure, a sensor with 4–20 mA output is used. This output is converted into voltage using an I-V converter. All these output signals are fed to an 8-channel analog multiplexer (CD4051). Its output is fed to a dual-slope 12-bit A/D converter (ICL7109). It is controlled by the microcontroller through the Programmable Peripheral Interface (PPI-82C55).Fig. 1. Block diagram of thermal energy meter cum controller.A flow sensor (turbine type) is used with a signal conditioner to measure the flow rate. Its output is fed to the counter input of the microcontroller. It is programmed to monitor all the multiplexed signals every minute, compute the temperature difference, energy transfer rate and integrated energy. A real-time clock with MM58167 is interfaced to the microcontroller to time-stamp the logged data. An analog output (0–2 V) is provided using D/A converter (DAC-08) to plot both the measured and computed parameters.A 4×4 matrix keyboard is interfaced to the microcontroller to enter the parameters like specific heat of liquid, data log rate etc. An alphanumeric LCD display (24-character) is also interfaced with the microcontroller to display the measured variables. The serial communication port of the microcontroller is fed to the serial line driver and receiver (MAX232). It enables the instrument to interface with thecomputer for down-loading the logged data. A battery-backed static memory of 56K bytes is provided to store the measured parameters. Besides data logging, the instrument serves as a DTC. This has been achieved by interfacing a relay to the PPI. The system software is developed to accept the differential temperature set points (ΔT on and ΔT off) from the keyboard. An algorithm suitable for on-off control having two set-points is implemented to control the relays.3 Instrument calibrationThe amount of energy transferred (Q) is :Where = mass flows rate of liquid kg/s ; V = volumetric flow rate (l/h) ; ρ = density of water (kg/l) ; Cp = specific heat (kJ/kg°C); and ΔT = temperature difference between hot and cold (°C).The accuracy in energy measurement depends on the measurement accuracy of individual parameters. Temperature measurement accuracy depends on the initial error in the sensor and the error introduced due to temperature drifts in the signal conditioners and the A/D converter. The temperature sensor is immersed in a constant temperature bath (HAAKE Bath-K, German), whose temperature can be varied in steps of 0.1°C. A mercury glass thermometer (ARNO AMARELL, Germany) with a resolution of 0.05°C is also placed along with PT100 sensor in the bath. This is compared with the instrument readings. The accuracy of the instrument in temperature measurement is ±0.1°C. Hence, the accuracy in differential temperature measurement is ±0.2°C.The flow sensor having a maximum flow rate of 1250 l/h is used for flow measurement. It is calibrated by fixing it in the upstream of a pipeline of length 8 m. The sensor output is connected to a digital frequency counter to monitor the number of pulses generated with different flow rates. Water collected at the sensor outlet over a period is used for estimating the flow rate. The K-factor of the sensor is 3975 pulses/l. The uncertainty in flow measurement is ±0.25% at 675 l/h. Uncertainties in density and specific heat of water are ±0.006 kg/l and ±0.011 kJ/kg°C respectively.Maximum amount of energy collection (Q) = 675×0.98×4.184×15/3600 = 11.53kW.Uncertainty in energy measurementωq/Q= [(ωv/V)2+ (ωρ/ρ)2+ (ωcp/Cp)2+(ωt/T )2]1/2.Inaccuracy in electronic circuitry is ±0.03 kW.The net inaccuracy in energy measurement is ±1.5%4 Field testThe instrument is incorporated in a solar water heating system as shown in Fig. 2. It consists of five solar flat plate collectors having an absorber area of 1.6 m2 each. The absorber is a fin and tube extruded from aluminium and painted with matt black paint. The collectors are mounted on a rigid frame facing south at an angle equal to the latitude of Bangalore (13°N). They are arranged in parallel configuration and connected to a thermally insulated 500 l capacity storage tank. A 0.25 hp pump is used for circulating the water through the collector field. All the pipelines are thermally insulated. The temperature sensors and the flow sensor are incorporated in the system as shown in Fig. 2. The data on solar radiation, ambient temperature, water flow rate, solar collector inlet and outlet temperatures and the system heat output are monitored at regular intervals.Fig. 2. Solar water heating system with thermal energy meter cum controller.The performance of the solar water heating system with TEMC on a partial cloudy day is shown in Fig. 3. It is observed that DTC switched OFF the pump around 14:40 h as there is no further energy gain by the collector field. This in turn reduced the heat losses from the collector to ambient. Experiments are conducted with and without DTC on both sunny and cloudy days. The DTC operated system shows the savings in electrical energy by 30% on a partial cloudy day and 8% on a sunny day. The variation in system output with and without DTC is around 3%. Thus the controller has not only served as an energy conservation device, but also switches ON/OFF the system automatically depending on the availability ofsolar radiation. The collector field output (shown in Fig. 3) is calculated by measuring the fluid flow rate using volumetric method and the temperature difference with another pair of standard thermometers. It is 16.86 kWh. It is compared with the instrument reading 17.18 kWh. Thus, the deviation is 1.9%. Fig. 3 shows that the solar collector field efficiency is 54% when the incident solar irradiation is 31.75 kWh.Fig. 3. Performance of SWH system with TEMC on a partial cloudy day.5 Concluding remarksTEMC is used as on-line instrument in solar water heating systems for the measurement of thermal energy, temperature, flow rate with simultaneous control on the operation of the pump to save electrical energy and enhance the thermal energy collection. Since several options are provided in the instrument, it can be used for monitoring the energy transfer rate in other thermal systems.AcknowledgementsThe authors are thankful to Department of Science and Technology, Govt. of India for providing the financial assistance to carry out the above work.References1. Shoji Kusui, Tetsuo Nagai. An electronic integrating heat meter. IEEE Trans. on Instrumentation and Measurement, 1990;39(5):785-789.中文翻译:智能热能表控制器摘要适用于太阳能热系统的单片机热能表控制器(TEMC)已经研制成功。
多功能热释电人体感应的设计制作——毕业论文或毕业设计说明书
多功能热释电人体感应的设计制作——毕业论文或毕业设计说明书多功能热释电人体感应的设计制作毕业论文或毕业设计说明书系部: 电子与通信工程系学生姓名: 刘冬梅专业班级: 通信11C3学号: 112231313指导教师: 蒋爱如2014年3月15日摘要由于日益变好的生活的生活现状,人们开始对一些现实社会的核心发展动力-科技开始了真正的追求,随着科技的水平的发展,生活中所用到的产品也越来越趋近于智能化,人性化。
可是,大多数的科技产品的出价却不是每个人都可以接受的,所以一些日常生活中很有需求的产品却不能得到普及化的使用程度,本课题将引进一种价格低廉,1方便推广使用的技术热释电红外传感器,它不仅价格低廉,而且安装和使用都很方便,这是一项真正的符合这个高速发展的社会的产品,这是平常人都能够享受的起的科技发展带来的产品,享受不到科技,再发达,也是惘然。
所以,这项技术有它的优势和发展空间。
热释电红外传感制作本身就不贵,也易购买,它不仅价格低,而且制作简单,且性能很稳定,不会轻易的被外界干扰。
你可以把它安装在通往客厅的过道里,它就变成一套兼备防盗和智能开关的双作用工具。
这套系统主要分为硬件部分和软件部分两大块,硬件主要采用:发光二极管显示模块、单片机模块、报警和照明模块、红外探头模块等。
本次处理器我决定采用51系列单片机STC89C52,程序使用C语言编写关键字:热释电红外传感器、STC89C52、红外线ABSTRACTDue to the rapid progress of economic development , the people's living standards improve, people began to force some of the core development of social reality - Technology started a real quest, with the level of development of science and technology, life products are used by more tends to be more2intelligent and humane. However, the prices of most technology products has discouraged a lot of people still make great demands ofdaily life products but can not get the degree of popularity of the use, the subject will introduce an inexpensive, easy to use thermal diffusion of technology pyroelectric infrared sensors, it is not only inexpensive, but also very easy to install and use, it is a real product in line with the rapid development of society, which is the ordinary people are able to enjoy from technological development to bringproducts not enjoy technology, then developed, also disconsolate. Therefore, this technique has its advantages and development space.Pyroelectric infrared sensor production cost is very low, it is easy to buy these devices, it is not only low prices, but making simple, and the performance is very stable, not easily to be outside interference. You can install it in the hallway leading to the living room, it becomes both a security and intelligent switch double-acting tools. This system consists of hardware and softwarecomponents into two blocks, the main use of the hardware: LEDdisplay module, microcontroller module, alarm and lighting module, infrared sensor module.The processor I decided to use 51 series STC89C52, using C language program.Keywords : pyroelectric infrared sensor , STC89C52, infrared目录一、引言 ..................................................................... . (4)二、方案设计 ..................................................................... . (4)(一)系统设计简介;..................................................................... (5)(二)总体设计框图 ..................................................................... . (5)三、硬件电路设计 ..................................................................... (7)3(一)总原理图 ..................................................................... .. (7)(二)PCB 图...................................................................... (7)(三)红外感应部分 ..................................................................... . (7)1、电源模块...................................................................... (8)2、热释电传感器 ..................................................................... . (8)3、菲涅耳透镜 ..................................................................... . (8)4、BISS0001芯片简介...................................................................... (9)5、信号采集处理模块...................................................................... .. (10)(四)单片机部分 ..................................................................... (11)1. STC89C52单片机简介 ..................................................................... . (11)2. 单片机最小系统 ..................................................................... (12)3.按键控制电路 ..................................................................... .. (12)4.指示灯和报警电路 ..................................................................... ......................... 13 四、软件的程序实现 ..................................................................... (13)(一)主程序工作流程图 ..................................................................... . (13)(二) 报警判断程序(附录一) .................................................................... .. (14)五、系统调试 ..................................................................... .. (14)(一) 硬件调试...................................................................... . (14)(二)软件调试 ..................................................................... (15)1. Keil编译器软件简介 ..................................................................... .. (15)2. 使用Keil软件建立一个Project................................................................. (16)六、总结评价 ..................................................................... .................................................. 21 七、致谢 ..................................................................... (21)八、参考文献 ..................................................................... .................................................. 21 九、附录 ..................................................................... (22)(一)报警判断程序 ..................................................................... ........................................... 22 (二)实物图 ..................................................................... .................................................. 23 (三)程序源代码 ..................................................................... . (23)一、引言随着计算机及网络技术的快速发展,在一切讲究高效率的今天,生活环境的建设也离不开信息化的建设。
电容式传感器中英文翻译资料毕业设计用
Capacitive Sensor Operation Part 1: The BasicsPart 1 of this two-part article reviews the concepts and theory of capacitive sensing to help to optimize capacitive sensor performance. Part 2 of this article will discuss how to put these concepts to work.Noncontact capacitive sensors measure the changes in an electrical property called capacitance. Capacitance describes how two conductive objects with a space between them respond to a voltage difference applied to them. A voltage applied to the conductors creates an electric field between them, causing positive and negative charges to collect on each objectCapacitive sensors use an alternating voltage that causes the charges to continually reverse their positions. The movement of the charges creates an alternating electric current that is detected by the sensor. The amount of current flow is determined by the capacitance, and the capacitance is determined by the surface area and proximity of the conductive objects. Larger and closer objects cause greater current than smaller and more distant objects. Capacitance is also affected by the type of nonconductive material in the gap between the objects. Technically speaking, the capacitance is directly proportional to the surface area of the objects and the dielectric constant of the material between them, and inversely proportional to the distance between them as shown.:In typical capacitive sensing applications, the probe or sensor is one of the conductive objects and the target object is the other. (Using capacitive sensors to sense plastics and other insulators will be discussed in the second part of this article.) The sizes of the sensor and the target are assumed to be constant, as is the material between them. Therefore, any change in capacitance is a result of a change in the distance between the probe and the target. The electronics are calibrated to generate specific voltage changes for corresponding changes in capacitance. These voltages are scaled to represent specific changes in distance. The amount of voltage change for a given amount of distance change is called the sensitivity. A common sensitivity setting is 1.0 V/100 µm. That means that for every 100 µm change in distance, the output voltage changes exactly 1.0 V. With this calibration, a 2 V change in the output means that the target has moved 200 µm relative to the probe.Focusing the Electric FieldWhen a voltage is applied to a conductor, the electric field emanates from every surface. In a capacitive sensor, the sensing voltage is applied to the sensing area of the probe. For accurate measurements, the electric field from the sensing area needs to be contained within the space between the probe and the target. If the electric field is allowed to spread to other items—or other areas on the target—then a change in the position of the other item will be measured as a change in the position of the target. A technique called "guarding" is used to prevent this from happening. To create a guard, the back and sides of the sensing area are surrounded by another conductor that is kept at the same voltage as the sensing area itself. When the voltage is applied to the sensing area, a separate circuit applies the exact same voltage to the guard. Because there is no difference in voltage between the sensing area and the guard, there is no electric field between them. Any other conductors beside or behind the probe form an electric field with the guard instead of with the sensing area. Only the unguarded front of the sensing area is allowed to form an electric field with the target.DefinitionsSensitivity indicates how much the output voltage changes as a result of a change in the gap between the target and the probe. A common sensitivity is 1 V/0.1 mm. This means that for every 0.1 mm of change in the gap, the output voltage will change 1 V. When the output voltage is plotted against the gap size, the slope of the line is the sensitivity.A system's sensitivity is set during calibration. When sensitivity deviates from the ideal value this is called sensitivity error, gain error, or scaling error. Since sensitivity is the slope of a line, sensitivity error is usually presented as a percentage of slope, a comparison of the ideal slope with the actual slope.Offset error occurs when a constant value is added to the output voltage of the system. Capacitive gauging systems are usually "zeroed" during setup, eliminating any offset deviations from the original calibration. However, should the offset error change after the system is zeroed, error will be introduced into the measurement. Temperature change is the primary factor in offset error.Sensitivity can vary slightly between any two points of data. The accumulated effect of this variation is called linearity erro. The linearity specification is the measurement of how far the output varies from a straight line.To calculate the linearity error, calibration data are compared to the straight line that would best fit the points. This straight reference line is calculated from the calibration data using least squares fitting. The amount of error at the point on the calibration line furthest away from this ideal line is the linearity error. Linearity error is usually expressed in terms ofpercent of full scale (%/F.S.). If the error at the worst point is 0.001 mm and the full scale range of the calibration is 1 mm, the linearity error will be 0.1%.Note that linearity error does not account for errors in sensitivity. It is only a measure of the straightness of the line rather than the slope of the line. A system with gross sensitivity errors can still be very linear.Error band accounts for the combination of linearity and sensitivity errors. It is the measurement of the worst-case absolute error in the calibrated range. The error band is calculated by comparing the output voltages at specific gaps to their expected value. The worst-case error from this comparison is listed as the system's error band. In Figure 7, the worst-case error occurs for a 0.50 mm gap and the error band (in bold) is –0.010.Gap (mm)Expected Value (VDC)Actual Value VDC)Error (mm) 0.50 –10.000 –9.800 –0.0100.75 –5.000 –4.900 –0.0051.00 0.000 0.000 0.0001.25 5.000 5.000 0.0001.50 10.000 10.100 0.005Figure 7. Error valuesBandwidth is defined as the frequency at which the output falls to –3 dB, a frequency that is also called the cutoff frequency. A –3 dB drop in the signal level is an approximately 30% decrease. With a 15 kHz bandwidth, a change of ±1 V at low frequency will only produce a ±0.7 V change at 15 kHz. Wide-bandwidth sensors can sense high-frequency motion and provide fast-responding outputs to maximize the phase margin when used in servo-control feedback systems; however, lower-bandwidth sensors will have reduced output noise which means higher resolution. Some sensors provide selectable bandwidth to maximize either resolution or response time.Resolution is defined as the smallest reliable measurement that a system can make. The resolution of a measurement system must be better than the final accuracy the measurement requires. If you need to know a measurement within 0.02 µm, then the resolution of the measurement system must be better than 0.02 µm.The primary determining factor of resolution is electrical noise. Electrical noise appears in the output voltage causing small instantaneous errors in the output. Even when theprobe/target gap is perfectly constant, the output voltage of the driver has some small butmeasurable amount of noise that would seem to indicate that the gap is changing. This noise is inherent in electronic components and can be minimized, but never eliminated.If a driver has an output noise of 0.002 V with a sensitivity of 10 V/1 mm, then it has an output noise of 0.000,2 mm (0.2 µm). This means that at any instant in time, the output could have an error of 0.2 µm.The amount of noise in the output is directly related to bandwidth. Generally speaking, noise is distributed over a wide range of frequencies. If the higher frequencies are filtered before the output, the result is less noise and better resolution (Figures 8, 9). When examining resolution specifications, it is critical to know at what bandwidth the specifications apply.Capacitive Sensor Operation Part 2: System OptimizationPart 2 of this two-part article focuses on how to optimize the performance of your capacitive sensor, and to understand how target material, shape, and size will affect the sensor's response.Effects of Target SizeThe target size is a primary consideration when selecting a probe for a specific application. When the sensing electric field is focused by guarding, it creates a slightly conical field that is a projection of the sensing area. The minimum target diameter is usually 130% of the diameter of the sensing area. The further the probe is from the target, the larger the minimum target size.Range of MeasurementThe range in which a probe is useful is a function of the size of the sensing area. The greater the area, the larger the range. Because the driver electronics are designed for a certain amount of capacitance at the probe, a smaller probe must be considerably closer to the target to achieve the desired amount of capacitance. In general, the maximum gap at which a probe is useful is approximately 40% of the sensing area diameter. Typical calibrations usually keep the gap to a value considerably less than this. Although the electronics are adjustable during calibration, there is a limit to the range of adjustment.Multiple Channel SensingFrequently, a target is measured simultaneously by multiple probes. Because the system measures a changing electric field, the excitation voltagefor each probe must be synchronized or the probes will interfere with each other. If they were not synchronized, one probe would be trying to increase the electric field while another was trying to decrease it; the result wouldbe a false reading. Driver electronics can be configured as masters or slaves; the master sets the synchronization for the slaves in multichannel systems.Effects of Target MaterialThe sensing electric field is seeking a conductive surface. Provided that the target is a conductor, capacitive sensors are not affected by the specific target material; they will measure all conductors—brass, steel, aluminum, or salt water—as the same. Because the sensing electric field stops at the surface of the conductor, target thickness does not affect the measurement中文翻译电容式传感器操作第一部分:基础 这篇文章的第一部分回顾了电容式传感器的概念和理论来帮助我们优化电容式传感器的性能。
热释电人体红外线传感器电子技术课程设计及实训(1)

热释电人体红外线传感器电子技术课程设计及实训(1)热释电人体红外线传感器电子技术课程设计及实训1. 引言随着技术不断发展,红外传感作为一种非接触式的检测技术得到了广泛应用。
其中,热释电人体红外线传感器作为一种常用的传感器,被广泛应用于安防、灯光控制等领域。
为了培养学生的动手实践能力和创新精神,本文进行了一项关于热释电人体红外线传感器的电子技术课程设计及实训。
2. 课程设计本课程设计旨在让学生了解热释电人体红外线传感器的结构、原理、特点和应用,并让学生在实验中全面掌握传感器的使用。
具体包括以下内容:(1)热释电人体红外线传感器的原理和结构介绍热释电人体红外线传感器的原理和结构,让学生了解传感器的基本工作原理和组成部分。
(2)热释电人体红外线传感器的特点及应用介绍热释电人体红外线传感器的特点和应用,例如在安防、灯光控制等领域的应用。
(3)热释电人体红外线传感器的电路设计根据热释电人体红外线传感器的原理,设计一个简单的电路并进行实验。
让学生了解电路的设计和布局方法,并学会使用示波器、万用表等工具。
(4)热释电人体红外线传感器的信号处理介绍热释电人体红外线传感器的信号处理方法,例如滤波、放大、模数转换等。
让学生了解信号处理的基本流程和方法。
3. 实训内容实训内容主要包括以下内容:(1)热释电人体红外线传感器电路的装配学生将自己设计的电路连接起来,并进行调试。
让学生学会使用电路元件和工具,了解电路的装配方法。
(2)热释电人体红外线传感器信号的测试学生将自己设计的热释电人体红外线传感器连接到示波器上,并进行测试。
让学生了解信号的测试方法和示波器的使用方法。
(3)热释电人体红外线传感器信号处理的实现学生将从传感器中获取的信号进行信号处理,例如进行滤波和放大,让学生了解信号处理的方法和流程。
(4)热释电人体红外线传感器应用的实现学生将热释电人体红外线传感器应用到实际的场景中,例如在安防系统中进行实时监测。
让学生了解传感器的实际应用场景。
传感器技术7-热电式传感器-中英对照
第7章 热电式传感器
2.铂、铜热电阻的特性 铂Platinum、铜Copper为应用最广的热电阻材料。 虽然铁Ferrum、镍Nickel的温度系数和电阻率均比 铂、铜要高,但由于存在着不易提纯(purify)和非线 性(nonlinearity)严重的缺点,因而用得不多。 铂容易提纯,在高温和氧化性(oxidative)介质中化 学、物理性能(physical properties)稳定,制成的铂 电阻输出-输入特性接近线性,测量精度高。
E A (T , T0 ) Adt E A (T0 , T )
T0
T
(7-8)
式中 EA(T,T0)——金属A两端温度分别为T与T0时的温差电势; σ A——温差系数(temperature differential coefficient); T、T0——高、低温端的绝对温度。
第7章 热电式传感器 Thermoelectric Sensors
第7章 热电式传感器
7.1
热电阻传感器 Thermal resistance sensors 热电偶传感器 Thermocouple sensors 热电式传感器的应用 Applications of thermoelectric sensors
第7章 热电式传感器
3.其他热电阻 ⑴.铟(Indium)电阻适宜在-269~-258℃温度范围内使 用,测温精度高,灵敏度是铂电阻的10倍,但是复 现性(repeatability)差。 ⑵.锰(Manganese)电阻适宜在-271~-210℃温度范围 内使用,灵敏度高,但是质脆易损坏。 ⑶.碳(Carbon)电阻适宜在-273~-268.5℃温度范围内 使用,热容量(thermal capacity)小,灵敏度高,价 格低廉,操作简便,但是热稳定性(thermal stability) 较差。
热释电红外传感器讲稿(英语)
Pyroelectric infrared sensor is a very potential applications of the thermal sensor.It can detect people or animals, the infrared transmitter and converted into an electrical signal output. As early as 1938, it was proposed detection using pyroelectric infrared radiation effect, but not taken seriously. Until the sixties, with the laser, infrared technology is developing rapidly, it has contributed to the pyroelectric effect and research on pyroelectric crystals application development. In recent years, along with the rapid development of integrated circuit technology, as well as the characteristics of the sensor depth study of the relevant application specific integrated circuit processing technology is also growing rapidly.
Pyroelectric
infrared sensors and thermocouples are based on the principle of thermoelectric infrared sensors. The difference is that pyroelectric infrared sensors’ thermoelectric coefficient is much higher than the thermocouple.
BISS0001热释电红外无线感应器中文资料

BISS0001热释电红外无线感应器中文资料--------------------------------------------------------------------------------BISS0001热释电红外无线感应器中文资料BISS0001是一款高性能的传感信号处理集成电路。
静态电流极小,配以热释电红外传感器和少量外围元器件即可构成被动式的热释电红外传感器。
广泛用于安防、自控等领域能。
BISS0001特点CMOS工艺数模混合具有独立的高输入阻抗运算放大器内部的双向鉴幅器可有效抑制干扰内设延迟时间定时器和封锁时间定时器采用16脚DIP封装BISS0001内部框图BISS0001工作原理BISS0001是由运算放大器、电压比较器、状态控制器、延迟时间定时器以及封锁时间定时器等构成的数模混合专用集成电路。
以下图所示的不可重复触发工作方式下的波形,来说明其工作过程。
不可重复触发工作方式下的波形。
首先,根据实际需要,利用运算放大器OP1组成传感信号预处理电路,将信号放大。
然后耦合给运算放大器OP2,再进行第二级放大,同时将直流电位抬高为VM(≈0.5VDD)后,将输出信号V2送到由比较器COP1和COP2组成的双向鉴幅器,检出有效触发信号Vs。
由于VH≈0.7VDD、VL≈0.3VDD,所以,当VDD=5V时,可有效抑制±1V的噪声干扰,提高系统的可靠性。
COP3是一个条件比较器。
当输入电压VcVR时,COP3输出为高电平,进入延时周期。
当A端接“0”电平时,在Tx时间内任何V2的变化都被忽略,直至Tx时间结束,即所谓不可重复触发工作方式。
当Tx时间结束时,V o下跳回低电平,同时启动封锁时间定时器而进入封锁周期Ti。
在Ti时间内,任何V2的变化都不能使V o跳变为有效状态(高电平),可有效抑制负载切换过程中产生的各种干扰。
以下图所示的可重复触发工作方式下的波形,来说明其工作过程。
外文文献翻译——基于热释电红外传感器的智能家居室内感应定位系统

S. Lee et al.: A Pyroelectric Infrared Sensor-based Indoor Location-Aware System for the Smart HomeA Pyroelectric Infrared Sensor-based IndoorLocation-Aware System for the Smart HomeSuk Lee, Member, IEEE, Kyoung Nam Ha, Kyung Chang Lee, Member, IEEE Abstract —Smart home is expected to offer various intelligent services by recognizing residents along with their life style and feelings. One of the key issues for realizing the smart home is how to detect the locations of residents. Currently, the research effort is focused on two approaches: terminal-based and non-terminal-based methods. The terminal -based method employs a type of device that should be carried by the resident while the non-terminal-based method requires no such device. This paper presents a novel non-terminal-based approach using an array of pyroelectric infrared sensors (PIR sensors) that can detect residents. The feasibility of the system is evaluated experimentally on a test bed.Index Terms— smart home, location-based service, pyroelectric infrared sensor (PIR sensor), location-recognition algorithmI. INTRODUCTIONThere is a growing interest in smart home as a way to offer a convenient, comfortable, and safe residential environment [1], [2]. In general, the smart home aims to offer appropriate intelligent services to actively assist in the resident’s lifesuch as housework, amusement, rest, and sleep. Hence, in order to enhance the resident’s convenience and safety, devices such as home appliances, multimedia a p p l i a n ce s,a n d i n te r n e t a p pl i an c e s s h o u l d b e co n n e c te d v i a a home network system, as shown in Fig. 1, and they should be controlled or monitored remotely using a television (TV) or personal digital assistant (PDA) [3], [4].Fig. 1. Architecture of the home network system for smart home Especially, attention has been focused on location-based services as a way to offer high-quality intelligent services, while considering human factors such as pattern of living, health, and feelings of a resident [5]-[7]. That is, if the smart home can recognize the resident’s pattern of living or health, then home appliances should be able to anticipate the resident’s needs and offer appropriate intelligent service more actively. For example, in a passive service environment, the resident controls the operation of the HVAC (heating, ventilating, and airconditioning) system, while the smart home would control the temperature and humidity of a room according to the resident’s condition. Various indoor location-aware systems have been developed to recognize the resident’s location in the smart home or smart office. In general, indoor location-aware systems have been classified into three types according to the measurement technology: triangulation, scene analysis, and proximity methods [8]. The triangulation method uses multiple distances from multiple known points. Examples include Active Badges [9], Active Bats [10], and Easy Living [11], which use infrared sensors, ultrasonic sensors, and vision sensors, respectively. The scene analysis method examines a view from a particular vantage point. Representative examples of the scene analysis method are MotionStar [12], which uses a DC magnetic tracker, and RADAR [13], which uses IEEE 802.11 wireless local area network (LAN). Finally, the proximity method measures nearness to a known set of points. An example of the proximity method is Smart Floor [14], which uses pressure sensors. Alternatively, indoor location-aware systems can be classified according to the need for a terminal that should be carried by the resident. Terminal-based methods, such as Active Bats, do not recognize the resident’s location directly, but perceive the location of a device carried by the resident, such as an infrared transceiver or radio frequency identification (RFID) tag. Therefore, it is impossible to recognize the resident’s location if he or she is not carrying the device. In contrast, non-terminal methods such as Easy Living and Smart Floor can find the resident’s location without such devices. However, Easy Living can be regarded toinvade the resident’s privacy while the Smart Floor has difficulty with extendibility a n d m a i n t e n a n c e. This paper presents a non-terminal based location-aware system that uses an array of pyroelectric infrared (PIR) sensors [15], [16]. The PIR sensors on the ceiling detect the presence of a resident and are laid out so that detection areas of adjacent sensors overlap. By combining the outputs of multiple PIR sensors, the system is able to locate a resident with a reasonable degree of accuracy. This system has inherent advantage of non-terminal based methods while avoiding privacy and extendibility, maintenance issues. In order to demonstrate its efficacy, an experimental test bed has been constructed, and the proposed system has been evaluated experimentally under various experimental conditions. This paper is organized into four sections, including this introduction. Section II presents the architecture of the PIR sensor-based indoor location-aware system (PILAS), and the location-recognition algorithm. Section III describes a resident-detection method using PIR sensors, and evaluates the performance of the system under various conditions using an experimental test bed. Finally, a s u m m a r y a n d t h e conclusions are presented in Section IV.II. ARCHITECTURE OF THE PIR SENSOR-BASED INDOORLOCATION-AWARE SYSTEMA. Framework of the smart homeGiven the indoor environment of the smart home, an indoor location-aware system must satisfy the following requirements. First, the location-aware system s h o u l d b e i m p l e m e n t e d a t a relatively low cost because many sensors have to be installed in rooms of different sizes to detect the resident in the smart home. Second, sensor installation must be flexible because the shape of each room is different and there are obstacles such as home appliances and furniture, which prevent the normal operation of sensors. The third requirement is that the sensors for the location-aware system have to be robust to noise, and should not be affected by their surroundings. This is because the smart home can make use of various wireless communication methods such as wireless LAN or radio-frequency (RF) systems, which produce electromagnetic noise, or there may be significant changes in light or temperature that can affect sensor performance. Finally, it is desirable that the system’s accuracy is adjustable according to room types.Among many systems that satisfy the requirement, the PIR sensor-based system has not attracted much attention even though the system has several advantages. The PIR sensors,which have been used to turn on a light when it detects human movement, are less expensive than many other sensors. In addition, because PIR sensors detect the infrared wavelengthemitted from humans between 9.4~10.4 μm, they are reasonably robust to their surroundings, in terms of temperature, humidity, and electromagnetic noise. Moreover, it ispossible to control the location accuracy of the system by adjusting the sensing radius of a PIR sensor,and PIR sensors are easily installed on the ceiling, where they are not affected by the structure of a room or any obstacles.Figure 2 shows the framework for the PILAS in a smart home that offers location-based intelligent services to a resident. Within this framework, various devices are connected via a home network system, including PIR sensors, room terminals, a smart home server, and home appliances. Here, each room is regarded as a cell, and the appropriate number of PIR sensors is installed on the ceiling of each cell to provide sufficient location accuracy for the location-based services. Each PIR sensor attempts to detect the resident at a constant period, and transmits its sensing information to a room terminal via the home network system.Fig. 2. Framework of smart home for the PILAS.Consequently, the room terminal recognizes the resident’s location by integrating the sensor information received from all of the sensors belonging to one cell, and transmits the resident’s location to the smart home server that controls the home appliances to offer location-based intelligent services to the resident.Within this framework, the smart home server has the following functions. 1) The virtual map generator makes a virtual map of the smart home (generating a virtual map), and writes the location information of the resident, which is received from a room terminal, on the virtual map (writing the resident’s location). Then, it makes a moving trajectory of the resident by connecting the successive locations of the resident (tracking the resident’s movement). 2) The home appliance controller transmits control commands to home appliances via the home network system to provide intelligent services to the resident. 3) The moving pattern predictor saves the current movement trajectory of the resident, the current action of home appliances, and parameters reflecting the current home environment such as the time, temperature, humidity, and illumination. After storing sufficient information, it may be possible to offer human-oriented intelligent services in which the home appliances spontaneously provide services to satisfy human needs. For example, if the smart home server “knows” that the resident normally wakes up at 7:00 A.M. and takes a shower, it may be possible to turn on the lamps and some music. In addition, the temperature of the shower w a t e r c a n b e s e t a u t o m a t i c a l l y f o r t h e r e s i d e n t.B. Location-recognition algorithmIn order to determine the location of a resident within a room, an array of PIR sensors are used as shown in Fig. 3. In the figure, the sensing area of each PIR sensor is shown as a circle, and the sensing areas of two or more sensors overlap. Consequently, when a resident enters one of the sensing areas, the system decides whether he/she belongs to any sensing area by integrating the sensing information collected from all of the PIR sensors in the room. For example, when a resident enters the sensing area B, sensors a and b output ‘ON’signals, while sensor c outputs ‘OFF’ signal. After collecting outputs, the algorithm can infer that the resident belongs to the sensing area B. According to the number of sensors and the arrangement of the sensors signaling ‘ON’, the resident’s location is deter-mined in the following manner. First, if only one sensor outputs ‘ON’ signal, the resident is regarded to be at the center of the sensing area of the corresponding sensor. If the outputs of two adjacent sensors are ‘ON’, the resident’s location is assumed to be at the point midway between the two sensors. Finally, if three or more sensors signal ‘ON’, the resident is located at the centroid of the centers of the corresponding sensors. For example, it is assumed that the resident is located at point 1 in the figure when only sensor a signals ‘ON’, while the resident is located at point 2 when sensors a and b both output ‘ON’ signals. The location accuracy of this system can be defined the maximum distance between the estimated points and the resident. For example, when a resident enters sensing area A, the resident is assumed to be at point 1. On the assumptionthat a resident can be represented by a point and the radius of the sensing area of a PIR sensor is 1 m, we know that the location accuracy is 1 m because the maximum error occurs when the resident is on the boundary of sensing area A. Alternatively, when the resident is in sensing area B, the resident is assumed to be at point 2, and the maximum location error occurs when the resident is actually at point 3. In this case, the error is 3 / 2 m which is the distance between points 2 and 3. Therefore, the location accuracy of the total system shown in Fig. 3 can be regarded as 1 m, which is the maximum value of the location accuracy of each area. Since the number of sensors and the size of their sensing areas determine the location accuracy of the PILAS, it is necessary to arrange the PIR sensors properly to guarantee the specified system accuracy.Fig. 3. The location-recognition algorithm for PIR sensors.In order to determine the resident’s location precisely and increase the accuracyof the system, it is desirable to have more sensing areas with given number of sensors and to have sensing areas of similar size. Fig. 4 shows some examples of sensor arrangements and sensing areas. Fig. 4(a) and 4(b) show the arrangements with nine sensors that produce 40 and 21 sensing areas, respectively. The arrangement in Fig. 4(a) is better than Fig. 4(b) in terms if the number of sensing areas. However, the arrangement in Fig. 4(a) has some areas where a resident can not be detected and lower location accuracy than that in Fig. 4(b). Fig. 4(c) shows an arrangement with twelve sensors that five 28 sensing areas without any blind spots.Fig. 4. Location accuracy according to the sensor arrangement of PIRsensors. (a) 40 sensing areas. (b) 21 sensing areas. (c) 28 sensing areaswith twelve sensors.When PIR sensors are installed around the edge of a room, as shown in Fig. 4(c), it sometimes may give awkward results. One example is shown in Fig. 5. Fig. 5(a) shows the path of a resident. If we mark the estimated points by using the sensor location or the midpoint of adjacent sensors, it will be a zigzagging patterns as shown in Fig. 5(b). In order to alleviate this, we may regard the sensors on the edges to be located a little inwards, which give the result shown in Fig. 5(c).Fig. 5. The effect of compensating for the center point of the outer sensors.(a) Resident’s movement. (b) Before compensating for the outer sensors. (c)After compensating for the outer sensors.III. PERFORMANCE EVALUATION OF THE PILASA. Resident-detection method using PIR sensorsSince the PILAS recognizes the resident’s location by combining outputs from all the sensors belonging to one cell, determining whether a single sensor is ‘ON’or ‘OFF’ directly influences location accuracy. In general, because the ‘ON/OFF’values can be determined by comparing a predefined threshold and the digitized sensor output acquired by sampling the analog signal from a PIR sensor, it is necessary to choose an appropriate signal level for the threshold. For example, Smart Floor, which is another non-terminal method, can recognize a resident’s location exactly by comparing the appropriate threshold and a sensor value, because a pressure sensor outputs a constant voltage based on the resident’s weight when he remains at a specific point. However, because a PIR sensor measures the variation in the infrared signal produced by a moving human body, its output is in analog form, as shown in Fig. 6. That is, as the variation in the infrared radiation from a resident increases when a resident enters a sensing area, the PIR sensor outputs an increasing voltage. Conversely, the voltage decreases as the resident leave the sensing area. If the resident does not move within the sensing area, the variation in the infrared radiation does not exist and the PIR sensor outputs zero voltage. Therefore, it is very difficult to deter-mine when a resident is staying resident within a specific sensing area using only the voltage or current threshold of a PIR sensor.Fig. 6. Signal output of PIR sensor.In order to guarantee the location accuracy of the system, the resident-detection method must meet several requirements. First, if no resident is present within a sensing area, the PIR sensor should not output ‘ON’ signal. That is, the PIR sensor must not malfunction by other disturbances such as a moving pet, temperature change and sunlight. Second, it should be possible to precisely determine the point in time when a resident enters and leaves a sensing area. That is, in spite of variations in sensor characteristics, resident’s speed and height, it should be possible to determine the time point exactly. Finally, because the output voltage of a PIR sensor does not exceed the threshold voltage when the resident does not move within a sensing area, it is necessary to know if a resident stays within the sensing area.In order to satisfy these requirements, this paper introduces the following implementation method for the resident detection method for PIR sensors. First, in order to eliminate PIR sensor malfunctioning due to pets or temperature changes, a Fresnel lens, which allows human infrared waveforms to pass through it while rejecting other waveforms, is installed in front of the PIR sensors. Second, when the output of a PIR sensor exceeds the positive threshold voltage, and thisstate is maintained for several predefined sampling intervals, that the resident has entered a sensing area. Here, the threshold must be sufficient for the method to distinguish variation in the resident’s infrared from an environmental infrared signal caused by pets or temperature change. Moreover, when the sensor’s output falls below a negative threshold voltage and this status is maintained for several sampling intervals, it is assumed that the resident has left the sensing area. Finally, when the output voltage remains between the two threshold voltages, for example when the resident is not moving inside the sensing area, the output of the corresponding PIR sensor is changed from ‘ON’ to ‘OFF’. At this time, if other sensors installed near this sensor do not output ‘ON’ signal, the method regards the resident as remaining within the corresponding sensing area.B. Performance evaluation using an experimental test bedIn order to verify the feasibility of the PILAS, an experimental test bed was implemented. Since the intelligent location-based service in the smart home does not require very high location accuracy, we designed the system to have a location accuracy of 0.5 m. Figure 7 shows the experimental test bed in a room measuring 4 × 4 × 2.5 m (width × length × height). In the experiment, twelve PIR sensors were fixed on the ceiling, using the arrangement shown in Fig. 4(c). An Atmel AT89C51CC001 microcontroller [17] was used for signal processing and judging ‘ON/OFF’, and a Nippon Ceramic RE431B PIR sensor [18] and NL-11 Fresnel lens were used. Especially, a horn was installed on each PIR sensor to limit the sensing area to the circle with 2 m diameter. Fig. 8 shows the experimental results with thehorn. In the figure, the RE431B sensor outputs the signal shown in (a) when a resident passes through the sensing circle, while it outputs the irregular signal shown in (b) when the resident moves within the circle. Finally, no signal is detected when the resident moves outside the circle, as shown in (c). From these experimental results, we verified that the PIR sensor detects residents within the sensing area only. In addition, in order to judge whether the signal is ‘ON’ or ‘OFF’, it is necessary to choose a threshold for the RE431B sensor that considers external environmental disturbance. Initially, several experiments were performed to determine the threshold with respect to the internal temperature change caused by a air conditioner or heater and other disturbances, such as wind or sunshine. Based on these experimental results, when the threshold of the RE431B sensor was ±0.4 V, external environmental temperature change did not affect its performance at detecting the resident. In addition, we verified that pets did not affect the sensing performance with the same threshold.Fig. 7. Experimental test bed for the PILAS.Fig. 8. Ensuring the exact sensing range with a horn.Next, in order to determine the resident’s location using the information received from PIR sensors, a PC-based locationrecognition algorithm was implemented, as shown in Fig. 9. Here, a PC collects data from the PIR sensors every 10 msec using an NI 6025E data acquisition (DAQ) board [19]. In the figure, the line in the left window was drawn using a mouse to show the path of the resident graphically, while that in the window on the right is the estimated movement trajectory of the resident drawn by connecting the resident’s locations acquired using the DAQ board.Finally, in order to verify the efficacy of the system, three experiments were performed with residents between 160 and 180 cm tall, moving at speeds b e t w e e n1.5a n d2.5k m/h. Figure 9 shows the trajectory of a resident moving along a Tshaped path. The trajectory made by connecting the resi-dent’s locations recognized by the PILAS, shown on the right, was similar to the target path shown on the left. We know that the maximum location error is about 30 cm without compensating for the outersensors. Fig. 10 shows the trajectory when the resident follows an H-shaped path. In this experiment, the location accuracy was similar to that in Fig. 9. We verified that the system could locate a resident with accuracy of 0.5 m, even if three or more sensors were activated. Figure 11 shows the trajectory of a resident moving along a square path. In this case, the location error is the largest, and the trajectory is not a straight line. We note that serious location errors occurred at each point marked by A due to the inaccurate judgment of the outer sensors. Nevertheless, the location error is still smaller than 0.5 m when moving in the square path. Here, the compensation method for outer sensors, which was explained in Fig. 5, reduces the location error at each point A. When the resident moves in a straight line, as shown in Fig. 12(a), the location error is relatively large without using the compensation method, as shown in Fig. 12(b). However, after applying the compensation method, we verified that the detection results for the areas in the small circles are enhanced by roughly about 30%.IV. SUMMARY AND CONCLUSIONSThis paper presents a PIR sensor-based indoor location aware system that estimates the resident’s location for location-based intelligent services in the smart home. This paper introduces the framework of smart home for the location-aware system, and a location-recognition algorithm that integrates the information collected from PIR sensors. In addition, this paper presents a resident-detection method. Finally, an experiment is implemented to evaluate the efficacy of the PILAS.Based on several experiments conducted under various conditions, we verified that the PILAS can estimates resident’s location sufficiently well. Moreover, because the location accuracy of the system is less than 0.5 m without any terminal for location recognition, the system can be very practical. Furthermore, it should be possible to enhance the location accuracy of the system by increasing the number of sensing areas, by equalizing the sensing areas based on the sensor arrangement, or by compensating for the centers of outer sensors.Since the location accuracy of this system differs according to the sensor arrangement, it is necessary to determine the optimal sensor arrangement that offers the greatest location accuracy. In order to enhance the location accuracy, it is also necessary to enhance the method of processing the PIR sensors using more advanced techniques such as probabilistic theories and soft computing. Finally, the proposed PILA system should be extended to deal with a room occupied by more than one residents.S. Lee 等人:基于热释电红外传感器的智能家居室内感应定位系统基于热释电红外传感器的智能家居室内感应定位系统Suk Lee,电机及电子学工程师联合会会员Kyoung Nam Ha, Kyung Chang Lee,电机及电子学工程师联合会会员摘要——智能家居,是一种可以通过识别具有不同生活习惯和感觉的住户来提供各种不同的智能服务。
Pyroelectric Sensors

Journal of Electroceramics2:4,229±242,1998whose polarization is obtained by poling and also can be switched by an electric®eld.The pyroelectric effect of ferroelectric pyroelec-trics usually exists below a certain transition temperature called the Curie point,T c,in the proper ferroelectrics and is more temperature dependent than that of the non-ferroelectric pyroelectrics.1.2.Primary and Secondary Pyroelectric Effects Thermodynamic analysis of the pyroelectric effect yields the expressionp s i p e i d T ijk c T Y E jklm a s lm 2 where p s i is the total pyroelectric effect measured at constant stress,and p e i,the pyroelectric effect at constant strain e,is called the primary effect.The second term of Eq.(2)is the contribution caused by thermal deformation of the crystal and is known as the secondary pyroelectric effect.The d,c,and a are the piezoelectric,elastic stiffness,and the thermal expansion coef®cients of the crystal,respectively.(A third contribution to the pyroelectric effect,known as the tertiary pyroelectric effect[4],arises from inhomogeneous temperature distributions within the sample.Since the origin of the tertiary effect depends on experimental conditions,it is not included in the present article.)In ferroelectric pyroelectrics,the primary effect,in general,is large and negative because the spontaneous polarization diminishes with increasing temperature. The secondary effect is considerably smaller and may have either sign depending on the values of the constants.Thus the experimentally observed pyro-electric coef®cients are dominated by the primary effect and are negative in ferroelectric crystals.In non-ferroelectric pyroelectric crystals there is no simple way to predict the sign and the magnitude of these coef®cients.In practice the total pyroelectric effect can be measured and the secondary effect calculated from the constants d,a,and c.For a number of applications,such as infrared detectors and vidicons,it is desirable to know the magnitude and sign of the contributions to the total pyroelectric effect.The secondary contributions for various crystal symmetry groups can be calculated from the following equations:p sec d21 c11a1 c12a2 c13a3 c15a5d22 c12a1 c22a2 c23a3 c25a5d23 c13a1 c23a2 c33a3 c35a5d25 c15a1 c25a2 c35a3 c55a5 3 for point group2and b as polar axis;p sec d31 c11a1 c12a2 c13a3d32 c12a1 c22a2 c23a3d33 c13a1 c23a2 c33a3 4 for point group mm2and c as polar axis;andp sec 2d31 c11a1 c12a1 c13a3d33 2c13a1 c33a3 5 for point groups3,3m,4,4mm,6,6mm and c as polar axis.Point group I m of the poled ceramic sample leads to equations equivalent in form to the hexagonal crystal system.The I axis is parallel to the poling direction and is denoted as x3.A few materials with their primary and secondary pyroelectric components are listed in Table1.The values of the constants are taken from the literature and from the Landolt-BoÈrnstein Tables on physical constants of materials[5].It is evident from the data that in ferroelectric ceramics and single crystals,both the primary and total pyroelectric effects are large and negative.Secondary coef®cients in ferroelectric single crystals are comparatively small and positive with the exception of(Sr,Ba)Nb2O6 (SBN)and NaNO2where the secondary pyroelectric effect is small and negative,enhancing the primary pyroelectric effect.In the case of triglycine sulfate (TGS),Ba2NaNb5O15,and the ceramics lead zirco-nium titanate(PZT)and BaTiO3,the secondary effect is substantial.Compared to ferroelectrics,tourmaline and other non-ferroelectric polar materials show rather small pyroelectric effects.In these materials,the total and the secondary coef®cients carry the same sign,and in most cases they are positive.The secondary effect, arising from piezoelectricity and thermal expansion makes a large contribution to the total pyroelectric effect.In tourmaline for instance,80%of the pyroelectric effect is of secondary origin.Fresnoite, Ba2TiSi2O8,is another mineral in which pyro-electricity is dominated by the secondary effect. In semiconductor pyroelectrics with the wurtzite230Lee,Guo and Bhallastructure,the effect is very small,with all coef®cients having the same sign.It is clear from the Table1that both the primary and secondary effects are important,and the certain trends emerge regarding the magnitude and sign of the coef®cients.All pyroelectric materials do not follow the same pattern,but members of the same family share common features:In ferroelectrics all the observed coef®cients are negative and dominated by the primary effect,in contrast to non-ferroelectric pyroelectrics where secondary effects could be more substantial.1.3.Methods for Determination of Pyroelectric Coef®cientsThere are several methods for measurements of pyroelectric coef®cients but most of those can be grouped into two categories[2,3].The objective in the ®rst case is to directly measure the pyroelectric current and at the same time vary the temperature.In the second approach measurements of polarization or charge can be estimated either by the integration of pyroelectric current during the continuous heating of the sample or recording the hysteresis loop at various temperatures by the Sawyer-Tower technique.In the®rst approach the varying temperature can be generated by using the chopping incoming radiation source or ac heating(known as Chynoweth technique) of the sample and the pyroelectric response current i can be expressed as[2,6]:ip Z WT rCt6where Z W is the power absorbed by the sample,T r is aTable1.Primary,secondary,and the observed pyroelectric effects in various pyroelectric materials(Room temperature values)Materials Point groupsymmetryObservedtotal effectm C/(m2ÀK)Calculatedsecondary effectm C/(m2ÀK)Primaryeffectm C/(m2ÀK)A)Ferroelectricsa)ceramicsPb(Zr0.52Ti0.48)O3:1wt%Nb2O5(PZT)I mÀ50 60À110.0 BaTiO3I mÀ190.0 80.0À270.0Pb(Zr0.95Ti0.05)O3:1wt%Nb2O5(PZT)I mÀ268.0 37.7À305.7b)single crystalSr0.5Ba0.5Nb2O6(SBN)4mmÀ550À21.0À529.0 (NH2CH2COOH)3ÁH2SO4(TGS)*2À270 60.0À330.0 LiTaO33mÀ176 2.00À178 LiNbO33mÀ83.0 12.9À95.9Pb5Ge3O113À95.0 15.5À110.5Ba2NaNb5O15**2mmÀ100.0 41.8À141.8 NaNO22mmÀ140.0À5.0À135.0B)Non-ferroelectricsLi2SO4(H2O2 86.3 26.1 60.2 tourmaline3m 4.0 3.2 0.8bone I 25Â10À4 117Â10À4À92.0Â10À4 Ba2Si2TiO8(Fresnoite)4mm 10 22, 16À12.0,À6.0 Li2GeO32mmÀ27À12.8À14.2Ba(NO2)2(H2OÀ25.3À3.3À22.0C)Semiconductors(Wurtzite structure)CdS6mmÀ4.0À1.0À3.0CdSe6mmÀ3.5À0.56À2.94ZnO6mmÀ9.4À2.5À6.9ZnS***6mm0.43 0.34BeO6mmÀ3.40À0.008À3.39*)A verage value of the wide range of reported values between200to350m C/(m2ÀK).**)Maximum value of p measured on the sample.***)No reported sign for p s;no information about polytypic nature of the sample.Pyroelectric Sensors231transfer function depending on the thermal circuit of the sample and the chopping or modulation frequency,t is the thickness of the sample,C H is the thermal capacity of the sample.Often a thin layer of highly absorbing material is applied on the sample surfaces in order to achieve Z 1.The pyroelectric current i(T)at a temperature T, can also be measured by uniformly heating or cooling the sample at a constant rate(in general1to4 C/min) and the pyroelectric coef®cient,p,can be calculated by using the following expression(Byer-Roundy technique)[7]:i TApD T a D t À17where A is the electroded area of the sample,D T/D t is the heating or cooling rate of the sample.In the second approach the charge release(in either of the two cases mentioned earlier)at a discrete temperature is determined and the pyro-electric coef®cient is obtained by graphically or by differentiation.1.4.Pyroelectric Material Figure of Merit Pyroelectric materials have found application in a wide range of®elds.For device applications and the convenience of application engineers,several®gures of merit criteria are de®ned.Most of these can be calculated using the thermal,electrical and optical characteristics of the materials available in the literature and various handbooks on the physical constants of materials[5]. The four major®gures of merit are listed below:i F DpC p re0k tan dp pyroelectric point detectorii F ipC p rfast pulse detectoriii F vpC p re0klarge area detectoriv F Vidp gC p re0kvidiconwhere C p is the speci®c heat,r is the density,e0is the vacuum permittivity(8X85Â10À12F/m),k is the dielectric constant,tan d is the dielectric loss tangent, g is the reciprocal thermal diffusivity and p is the pyroelectric coef®cient of the material at the operating temperature of the device[8].While expression(i)evaluates the material characteristics for the point detector,the®gure of merit(ii)is suf®cient to select suitable materials for fast high power laser pulse detectors.Expression(iii) is good for large area detectors.For an infrared imaging systems,where array designs are desirable, expression(iv),which includes the thermal diffusivity aspects,is the suitable one.1.5.Induced Pyroelectric EffectIn several pyroelectric device designs an induced pyroelectric effect(under an applied electric®eld)has been exploited.The induced pyroelectric coef®cient, p ind is de®ned as:p ind e0Ed kdT8 where E is the applied®eld and T is the temperature. The sign of the p ind is de®ned by the electric®eld vector.The material®gure of merit for this category is expressed asp ind gC p rk E tan d Ep 9where k E and tan d E are the dielectric constant and the dielectric loss factor respectively,of a material at a speci®c electric®eld.Materials of interest in this category are usually high dielectric constant relaxor ferroelectric ceramics and crystals with dispersive nature and Curie point near room temperature.These materials are important for large area infrared imagers.It is clear from the above expressions that high p/k is the®rst clue for the selection of a suitable material for pyroelectric devices.1.6.Important Candidate MaterialsThe most suitable candidate materials for pyroelectric devices are listed in Tables2and3[8,9]. Several modi®ed TGS compositions have attrac-tive pyroelectric properties(Table3)and are thus useful for the highly sensitive IR imagers.In Table3, the various letters represent D deuterium, B beryllium,F ¯uorine,M manganese, P phosphorous,As arsenic,L lithium,and232Lee,Guo and BhallaT a b l e 2.P y r o e l e c t r i c P r o p e r t i e s o f I m p o r t a n t P y r o e l e c t r i c s a t 25 Cp D i e l e c t r i c p r o p e r t i e s C P K T cF VF DF v i dM a t e r i a l(m C /m 2K )k t a n d (106J m À3K À1)(10À7m 2S À1)( C )(m 2C À1)(10À5P a À1/2)(106s C À1)P V D F 27012(10H z )0.015(10H z )2.430.6280 0.10.881.6L i T a O 32304710À4t o 5Â10À33.213.06650.1735.2t o 4.90.131S B N 505504003Â10À32.341210.077.22P Z F N T U C e r a m i c s 380290(1k H z )2.7Â10À3(1k H z )2.52300.065.83P C W T 4/24C e r a m i c s 380220(1.5k H z )0.011(1.5k H z )2.52550.083.34P G O 110405Â10À4(100H z )2.03.01780.1613.10.55P G O :B a 3320811Â10À3(100H z )2.03.0700.228.40.7T G S 550(35 C )550.0252.63.3490.436.11.3D T G S 550(40 C )430.0202.43.3610.608.31.8T G F B 700(60 C )500.0282.63.3730.617.61.8A T G S A s7003250.010510.99*416.6*3.01S B N 50ÐS r 0.5B a 0.5N b 2O 6.2P Z F N T U ÐP b Z r O 3:P b T i O 3:P b F e 0.5N b 0.5O 3.3P C W T 4/24Ð(P b 0.76C a 0.24)(C o 0.5W 0.5)0.04T i 0.96O 3.4P G O ÐP b 5G e 3O 11.5P G O ÐB a 3:P b 4.7B a 0.3G e 3O 11.Pyroelectric Sensors 233A alanine,and these elements have been used for the doping or modi®cation of TGS.Figure 1shows typical values of p ,k ,and p/k and their temperature dependencies for the single crystal of ATGSAs.In proper ferroelectrics,a simple phenomenolo-gical approach is suggested to relate the pyroelectric ®gure of merit p/k to more basic parameters of the pyroelectric crystals [10,11].For a very wide family of displacive and order-disorder ferroelectrics,an empirical relation p a k p 3Â10À9C Ácm À2Ádeg.À1applies where as for several modi®ed triglycine sulfate (TGS)crystals the relation p a k 3a 4 3Â10À9C Ácm À2Ádeg.À1holds nicely.Figure 2summarizes the results for most ferroelectric pyroelectrics.2.Pyroelectric DevicesThe pyroelectric device is a thermal sensor,wherein the light power is converted to an electrical output.Its response is independent of the wavelength of light or radiant energy it receives.The pyroelectric detector is especially useful for the near to far infrared (IR)because of its high sensitivity and the good transmittance of IR in air (when using a proper window material).2.1.Sensor AssemblageFigure 3gives a typical design of pyroelectric single element detector,which consists of a window,a sensing element,and integral electronics (readout integral circuit).2.1.1.Window.The window restricts incoming light to a wavelength band of interest,and it protects the sensing element and internal electrical circuits from physical and/or chemical damage and moisture.The properly selected window can have a function of an optical ®lter that blocks unwanted wavelengths and passes desired wavelengths.The type of window as ®lter could be chosen [2]with the consideration of applications and to eliminate the possible interfering radiation.In general,four kinds of ®lters are used as the window,such as low-pass,high-pass,narrow-band,and wide-band ®lters.The single crystals of Ge,Si,Al 2O 3,and ZnS,which are coated with many layers of MgF 2,BaF 2,PbF 2,CaF 2,and ZnSe,are used as the ®lter for the IR region [12±16].Following the theory of blackbody radiation,the intensity of a radiated wave shows a wavelengthTable 3.Pyroelectric properties of the TGS family (optimum temperature)Material k p (m C/m 2ÀK)P s (m C/cm 2)T c ( C)p /k (10m C/m 2ÀK)TGS 30330 3.049 1.1DTGS 1927062 1.4TGFB 14±16210±14073 1.5DTGFB 11±14190±240 4.375 1.7LTGS 40400 3.749 1.0MTGS40560 4.649 1.2ATGSP (25 C)30±32650 5.051 2.0ATGSAs (25 C)32700 6.051 2.1±2.3ADTGSP 22460 5.360 2.1ADTGSAs235006.2622.2Fig.1.Temperature dependence of p ,k ,and p/k for ATGSAs (alanine and arsenic doped triglycine sulphate)crystal.234Lee,Guo and Bhalladistribution at the object temperature.The wavelength of maximum intensity will be the most practical guide for objects.The Wien's law can give the wavelength l of the maximum intensity in micrometers;l 2,893/T ,where T is in Kelvin [K][17].In case of detecting the presence of a person,the intensity near 10m m in wavelength shows the peak value.Possible sources of interference are the re¯ected and head lights in the visible range.Since the wavelength of maximum intensity for interferences are shorterthan 10m m,a window of long-pass or low-pass ®lter type is required.For detection of molecular gases,a narrowband or very restrictive bandpass window might be required.2.1.2.Sensing element .The sensing element of a pyroelectric detector is a thin wafer of single crystal or ceramic.The material has a high Curie point (T c ),high ®gures of merit F V ,F I ,F D ,and good thermal and mechanical properties.The layout,electrode design,and packaging for the sensing element will be discussed in the later sections.2.1.3.Integral electronics.When the detector is heated by incident radiation,the temperature change might result in polarization changes,which appear as charge on the capacitor formed by the pyroelectric with its two electrodes.Since this capacitance is fairly small,the detector itself has very high ac impedance.In most applications,these very high ac and dc impedances must be converted to a more practical low impedance output.In order to detect this small charge,low-noise and high-impedance ampli®ers are necessary[13,17].Fig.2.Pyroelectric coef®cients and pyroelectric ®gure of merit p /e 0k C vs.dielectric constant,for various proper ferroelectric materials.Solid lines and broken lines represent the TGS family and the displacive &order-disorder ferroelectrics respectively C r C P.Fig.3.Typical design of a single element pyroelectric detector.Pyroelectric Sensors 235This can be done in two ways[13,17,18]:a voltage follower and a current ampli®er.The voltage mode circuit(a voltage follower)will yield the best signal-to-noise(S/N)ratio and low output impedance.It can operate at a very small supply voltage and current,i.e. low power consumption.However,it does not have a large output responsivity,which varies with fre-quency.The current mode offers substantial increase in output signalÐhigh responsivity,which is inde-pendent of frequency.Unfortunately,the noise characteristics of the ampli®er limit the S/N ratio that it requires the high operating voltage and current. Though the voltage or current mode circuit can be used as readout circuit,the additional stray-capaci-tance,RF pickup,compromise in reliability,testing problem,and the cost will be the major concerns.To overcome these problems,a simple FET(JFET or MOSFET)with an appropriate load resistor or OP-AMP with feedback resistor in the detector package is suggested as the most common arrangement.The resistance of a load or feedback resistor is in the range of gigaohms.These high quality bias resistors must have good environmental stability,low temperature coef®cient of resistance(TCR),and low voltage coef®cient of resistance(VCR).Since the output of the pyroelectric sensor is proportional to the product of the pyroelectric current and the bias resistance, TCR and VCR result in the nonlinearity of the overall transfer function of the sensor.2.2.Performance of the Detector2.2.1.Pyroelectric response.In order to analyze the performance of pyroelectric detectors,both the thermal and electrical equivalent circuits should be considered[18,8].Figure4shows a typical arrange-ment of practical detectors.When a pyroelectric detector is exposed to radiation power W t W o e i o t, modulated at a frequency o,the temperature of the sensing element of the detector would also be modulated at o by an amount which depends on the light absorptance Z,heat capacitance H T,and thermal conductance G T.The temperature difference(y) between the sensing element and its surroundings is described by Eq.(10):Z W t H T d y a dt y G T 10 which has the solution,y Z W o e i o t a G T i o H T 11 where t is time.The current responsivity(R I)is de®ned as,R I I a W o dq a dt a W o d pA y a dt a W oZ pA o a G T 1 o2t T2 1a2 12 where I,q,A,p,t T represent the current,pyroelectric charge,electrode area of detector,pyroelectric coef®cient,and thermal time-constant H T/G T , respectively.The voltage responsivity R V is de®ned as:R V V a W o I a G E i o C E a W oZ pA o a G T G E 1 o2t T2 1a2 1 o2t E2 1a213 where G E,C E,E are the electrical conductance, capacitance,and time constant C E/G E ,respec-tively.With Eq.(12)and(13),references19and20 propose a procedure for the analysis of thermal properties by use of step-signal radiation.Following Eq.(12)and(13),small G T and large values of Z,p, and A of the detector are required for obtaining the high outputs.Good thermal isolation of the thin pyroelectric sensing element from the surroundings result in a small G T.Several methods for thermal isolation, especially by support of the thin sensing element, have been suggested.The use of a conducting spherical ball is one method,but this cannot offer simple fabrication and stable performance of the detector.The detector consists of a thin circular crystal plate coated with circular surface electrodes and is mounted on a shallow cylindrical substrate. Oettel[21]proposed a pyroelectric detector mounted on several arch-like metal wires attached to the base or mounting platform.The sensing element can be raised above the base by means ofsprings Fig.4.Equivalent circuit of a pyroelectric detector.236Lee,Guo and Bhalla(Matsushita)and wires(Eltec)[13].It can also be mounted on adhesive posts,bars,hollow base (Murata),and mica plates of low thermal conduc-tivity.In addition,a PEC(pyroelectric materials on an electric conductor)structure with air-gap was proposed by Kuwano et al.[22].In case of staring array,a sensing element supported on a silicon substrate by microbridges(GEC-Marconi)had been fabricated by anisotropic etching[23,24].The light absorptance(Z)of electrode sensing elements can affect the output of the detector.In order to increase Z,a metallic thin®lm,metal-black paste, and evaporated or electroplated metal-black are commonly used as the light absorbers[25,26]. Recently,in the case of array-type devices,multilayer absorbers with single cavities(SCA)[27]and with double cavities(DCBA)[28]were proposed for use as the light absorber.The performance of pyroelectric detectors has been enhanced through the improvement of pyroelectric materials,fabrication techniques,sensor layout,and sensor systems.In general,the incident IR is periodically chopped for the ordinary pyroelectric detector in order to generate a continuous output voltage or current.However,the chopping system is large in size,requires high power,and shows low reliability.Shibata et al.[29±31]proposed the modulation type pyroelectric detector(M-type IR detector)which is composed of a sensing part and a solid-state chopper with two piezoelectric bimorph-vibrators and two slit-plates in the same package.This features high reliability,small volume,and low power consumption compared with conventional detectors using a rotating chopper.2.2.2.Noise factors.The response and noise of a detector must be considered when analyzing its usefulness for a particular application.The usefulness of a detector can be expressed in many different ways [8,18,32].One of the most useful and practical consideration is the noise-equivalent power(NEP). This is de®ned as the incident power that is required to produce a signal to the rms noise voltage V N :NEP V N a R V 14 Occasionally,if the detector is placed into a uniform radiation®eld,the noise-equivalent irradi-ance(NEI)is a more relevant performance®gure of merit,and is de®ned as:NEI NEP/A 15 This enables one to compare the ability of differentsized devices to detect a given irradiance or incident power density.The NEP is usually expressed in units of WHzÀ1/2(being speci®ed for a particular frequency and unit bandwidth),or in W(being the ratio of broadband noise to responsivity at a speci®ed frequency).Similarly,the NEI is expressed in WmÀ2HzÀ1/2or WmÀ2.Furthermore,the reciprocal of NEP is de®ned as the detectivity D ;and the speci®c detectivity D* is de®ned as:DÃ A1a2a NEP 16 that is normalized to unit bandwidth.The D*is expressed in mHz1/2WÀ1.If the noise source is proportional to A1/2,D*is independent of area and can be used to compare the merits of detectors with different size electrodes.However,this condition is not always satis®ed and D*must be used with caution. There are three major noise sources in a simple pyroelectric detector:thermal noise V t ,dielectric noise V d:Johnson noise ,and ampli®er noise(V e: input-voltage noise,V i:input-current noise,V r:shunt-resistor noise),which are expressed as Eq.(17±21): V t R V 4kT2G T 1a2a Z 17 V d 4kT o R2C E tan d a 1 o2t E2 18 V e e A 1 o2R2C E2 a 1 o2t E2 1a2 19 V i i A R a 1 o2t E2 1a2 20 V r 4kTR a 1 o2t E2 1a2 21 The total mean square noise voltage V N may then be written as,V N2 V t2 V d2 V e2 V i2 V r2 22 An indication of the relative magnitudes of these various sources of noise for a typical detector is given in Fig.5.It has been assumed that both the thermal and electrical time constants are longer than one second.The loss-controlled Johnson noise dominates above about20Hz,while the thermal noise is insigni®cant and is often ignored in calculations. Pyroelectric detectors could give unwanted outputs due to the environmental effects,such as temperature ¯uctuation(thermal cycling,rapid changes in ambient temperature),mechanical vibration,electromagnetic interference,and sudden relief of stress caused by the differences in the thermal expansion of packagingPyroelectric Sensors237components[8,18,32,33,34].These can give rise to microphonic(vibrational or acoustic)noise[35], thermally induced noise(transients),spurious noise pulses or spurious output signals[36±40].Many methods have been proposed to eliminate the unwanted output signals,such as the use of less rigid mounting of pyroelectrics,single point supports, polycrystalline materials,electrically conducting windows,and good package design[17].2.2.pensated detectors.Mechanical clamp-ing,as mentioned previously,can attenuate noise due to the ambient temperature changes and vibrational pickup.Further reductions in these sources of noise [8,18]have been achieved by using compensated detectors,as shown in Fig.6[13].Byer et al.[41]fabricated pyroelectric detectors with a novel complementary domain con®guration that reduced the interference from vibrational noise sources and from changes in ambient temperature by over an order of magnitude relative to the perfor-mance of conventional pyroelectric detectors. Compensation is obtained by connecting two oppo-sitely polarized detector elements either in series or in parallel,the two elements must be of equal area if connected in parallel[17],with only one-element exposed to the IR radiation.Since environmental changes affect both elements alike,the signals from the two elements cancel each other,and no output is observed.Greater ef®ciency can be obtained where a moving target is viewed by arranging the system so that the image moves from one element to the other. The double-serial(DS)detector is not much different from the single one apart from the changed frequency characteristics of noise and voltage response.Putley[42]calculated the performance of this type of detector.Following his calculation,the compensation would degrade R V and NEP by a factor between21/2and2,depending on the frequency range and the dominant noise mechanism.It is easy to form the functional patterns on the sensing element.A modi®ed circuit[43],in which one channel is unbalanced by an additional capacitor,has been proposed to improve the frequency-dependent CMRR(common-mode rejection ratio),where CMRR at low frequency is higher than that at high frequency,and the turbulence signals are shifted to higher frequency.This circuit is useful for motion detectors because of its improved CMRR property with frequency[44].The double-parallel(DP)detector is dif®cult to construct due to connections between the electrodes. The usual solution is to mount the two separate thin crystalline sensing elements on the separate holders. However,this technique lacks uniformity and precise cancellation of common vrencic et al.[45] have suggested one method to construct a DPdetectorFig.6.Available con®gurations of pyroelectric sensing elements:(a)single element,(b)double-series element,(c)double-parallelelement,(d)twin element,and(e)thermally compensated,shielded double element.238Lee,Guo and Bhalla。
热释电传感报警器课程设计报告
电子课程设计报告题目名称:热释电传感电路姓名:专业:电子信息工程班级学号:同组人:指导教师:信息工程学院2011 年 3 月9 日信息工程学院电子专业课程设计任务书I、电子专业课程设计题目:热释电传感报警电路热释电传感报警电路II、电子专业课程设计技术要求及主要元器件:基本设计要求:①有人接近传感器时,热释电传感器报警电路发出报警,无人接近时不报警。
②白天不起作用,晚上自动工作。
主要参考元器件:(1)LM324 (2) LM339 (3) 74LS08 (4)光敏二极管I I I、电子专业课程设计工作内容及进度安排:(共11天)第1天:设计出电路图;第2天:领元件并焊接好;第3-6天-----初步调试;第7-10天:系统调试;第11天:验收、总结.。
Ⅳ、主要参考文献:1.华成英主编模拟电子技术基本教程北京清华大学出版社出版社 2006.2.阎石主编数字电子技术基础(第五版)北京高等教育出版社 2006.3.刘法治主编常用电子元器件及典型芯片应用技术北京机械工业出版社 2007. 专业名称:电子信息工程班级学号:学生姓名:指导教师:系(部、中心)主任:设计时间:2011年3月摘要随着时代的不断进步,人们对自己所处环境的安全性提出了更高的要求,尤其是在家居安全方面,热释电传感报警系统,大大提高了人们生命财产的安全程度,有效保证了居民的人身财产安全。
由于红外线是不可见光,有很强的隐蔽性和保密性,因此在防盗、警戒等安保装置中得到了广泛的应用。
此外,在电子防盗、人体探测等领域中,被动式热释电红外探测器也以其价格低廉、技术性能稳定等特点而受到大家的欢迎。
关键字:放大与门传感器报警目录前言 (1)第一章热释电传感报警系统设计内容及要求 (1)1.1设计内容 (1)1.2.1设计电路要求 (2)1.2.2设计任务要求 (2)1.3 主要参考器件 (2)第二章热释电传感报警系统设计方案 (2)2.1 设计原理 (2)2.2 设计方案 (3)第三章热释电传感报警系统组成及工作原理 (3)3.1 信号输入部分 (3)3.2 放大部分 (4)3.3比较部分 (4)3.4与门部分 (4)3.5光敏部分 (5)第四章实验组装、调试及结果分析 (5)4.1 电路的安装 (5)4.2.1电路的调试要 (5)4.2.2电路调试遇到的问题及解决办法 (5)总结 (6)参考文献 (6)附录一 (7)附录二 (7)前言本论文主要是研究并讨论如何用热释电传感器来实现报警,介绍了该报警器的特点及应用和电路各单元模块功能是如何实现的,总结了在电路调试中遇到的问题及解决方案,本论文是在模拟电路的基础上探讨研究如何对一个较小信号进行处理。
热释电传感器课程设计总结报告-V1

3. 示波器:用于检测信号波形以及波形的幅度等方面的信息。
4. 恒流源:用来提供恒定电流,以保证实验结果准确性。
5程包括以下几个步骤:
1. 设计电路:根据热释电传感器的原理,设计实验电路。
热释电传感器课程设计总结报告-V1
摘要:
热释电传感器作为一种新型传感器,其性能优良,应用广泛。本文就热释电传感器课程设计进行了总结报告,包括热释电传感器原理、课程设计的内容及步骤、实验设备、实验过程和实验结果分析等方面进行了详细介绍。通过本次课程设计,学生们不仅对热释电传感器有了更深入的理解,同时也不断提高了实验能力和创新能力。
二、热释电传感器的原理
热释电效应是指当某些特定材料受热或者变化时,会释放出电荷。热释电传感器就是通过利用这种效应来测量温度,压力,加速度等物理量。
具体来说,在热释电传感器中,通过利用热释电晶体材料的自然性能来实现环境参数的测量。热释电晶体材料在光源的照射下,会产生热电效应,使材料表面的温度发生变化,从而产生电信号。这种电信号的大小与热释电晶体材料所受的温度变化量成正比。
三、课程设计的内容及步骤
对于热释电传感器的课程设计,主要包括以下内容:
1. 热释电传感器原理的介绍:对于热释电传感器的工作原理进行详细介绍,以便学生们更好地理解热释电传感器的基本原理。
2. 设计热释电传感器电路:根据热释电传感器的原理,设计相应的电路,以实现对于温度、压力等参数的测量。
3. 制作并测试热释电传感器:根据电路的设计,搭建实验装置,制作热释电传感器,并进行相关的测试实验。
4. 实验结果的分析与总结:通过实验结果的分析,总结出热释电传感器的特点和应用领域,并提出相关改进意见。
热释电红外传感器毕业论文中英文资料对照外文翻译
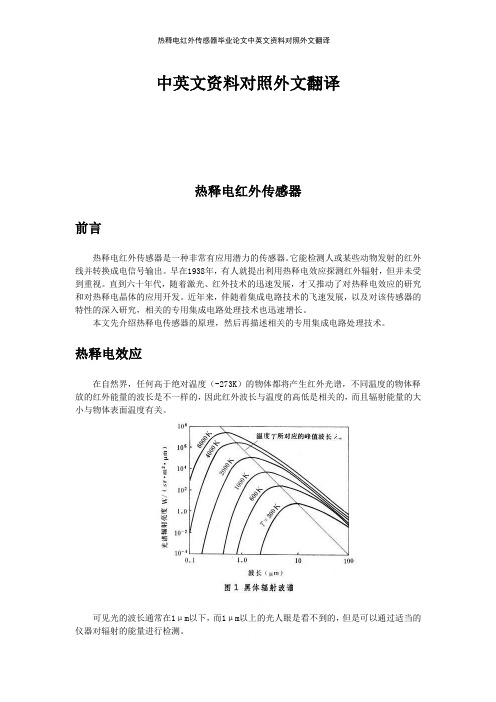
中英文资料对照外文翻译热释电红外传感器前言热释电红外传感器是一种非常有应用潜力的传感器。
它能检测人或某些动物发射的红外线并转换成电信号输出。
早在1938年,有人就提出利用热释电效应探测红外辐射,但并未受到重视。
直到六十年代,随着激光、红外技术的迅速发展,才又推动了对热释电效应的研究和对热释电晶体的应用开发。
近年来,伴随着集成电路技术的飞速发展,以及对该传感器的特性的深入研究,相关的专用集成电路处理技术也迅速增长。
本文先介绍热释电传感器的原理,然后再描述相关的专用集成电路处理技术。
热释电效应在自然界,任何高于绝对温度(-273K)的物体都将产生红外光谱,不同温度的物体释放的红外能量的波长是不一样的,因此红外波长与温度的高低是相关的,而且辐射能量的大小与物体表面温度有关。
可见光的波长通常在1μm以下,而1μm以上的光人眼是看不到的,但是可以通过适当的仪器对辐射的能量进行检测。
当一些晶体受热时,在晶体两端将会产生数量相等而符号相反的电荷,这种由于热变化产生的电极化现象,被称为热释电效应。
通常,晶体自发极化所产生的束缚电荷被来自空气中附着在晶体表面的自由电子所中和,其自发极化电矩不能表现出来。
当温度变化时,晶体结构中的正负电荷重心相对移位,自发极化发生变化,晶体表面就会产生电荷耗尽,电荷耗尽的状况正比于极化程度,图1表示了热释电效应形成的原理。
能产生热释电效应的晶体称之为热释电体或热释电组件,其常用的材料有单晶(LiTaO3 等)、压电陶瓷(PZT等)及高分子薄膜(PVFZ等)[2]当以LiTaO3为代表的热释电材料处于自极化状态时,吸收红外线入射波后,结晶的表面温度改变,自极化也发生改变,结晶表面的电荷变得不平衡,把这种不平衡电荷的电压变化取出来,便可测出红外线。
热释电材料只有在温度变化时才产生电压,如果红外线一直照射,则没有不平衡电压,一旦无红外线照射时,结晶表面电荷就处于不平衡状态,从而输出电压。
热释电红外传感器论文

热释电红外传感器论文昌吉学院物理系09届工科专业毕业设计(论文)课题名称:热释电红外传感器的应用院(系):物理系专业:电气自动化班级: Z0902组长:孙兵组员:孙晶唐媛媛林轶男教师(签字):唐志航完成日期: 2 0 1 1年1 2月【摘要】通过对一个热释电红外探测电路进行理论分析与实验测试,指出了其不妥之处,针对性的给出了更为合理的应用电路。
经过实验验证,改进后的电路工作可靠性提高,适用于日常生活的自动照明、自动消防龙头方面。
此实验具有制作简单,成功率高,趣味性强等特点,通过对本电路的印制板设计和安装调试提高了我们对数字电路理论的理解,特别是提升了我们实践动手能力。
【关键词】红外传感器;电压比较器;延时电路;继电器目录:第一章概述(热释电红外传感器原理特性)第二章实际电路的分析及修改第三章电路介绍第四章制作过程第五章通电测试第六章结束语第七章参考文献第一章概述随着时代的不断进步,人们对自己所处环境的安全性提出了更高的要求,尤其是在家居安全方面,不得不时刻留意那些不速之客。
现在很多小区都安装了智能报警系统,因而大大提高了小区的安全程度,有效保证了居民的人身财产安全。
由。
于红外线是不可见光,有很强的隐蔽性和保密性,因此在防盗、警戒等安保装置中得到了广泛的应用。
此外,在电子防盗、人体探测等领域中,被动式热释电红外探测器也以其价格低廉、技术性能稳定等特点而受到广大用户和专业人士的欢迎。
目前国内使用的各类防盗、保安报警器基本都是以超声波、主动式红外发射/接收以及微波等技术为基础。
而这里所设计的被动式红外报警器则采用了美国的传感元件——热释电红外传感器。
这种热释电红外传感器能以非接触形式检测出人体辐射的红外线,并将其转变为电压信号,同时,它还能鉴别出运动的生物与其它非生物。
热释电红外传感器既可用于防盗报警装置,也可以用于自动控制、接近开关、遥测等领域。
用它制作的防盗报警器与目前市场上销售的许多防盗报警器材相比,具有如下特点:●不需要用红外线或电磁波等发射源。
热释电人体感应红外报警器设计制作教案

毕业设计热释电人体感应红外报警器设计制作学生学号:学生姓名:导师姓名:班级专业名称提交日期年月日答辩日期年月日年月摘要随着现在社会的发展,时代进步,高新技术的快速融入,人们的生活发生了巨大的改变,人们置购了大量高新技术的产品,许多高科技产品的使用越来越成为家庭生活的主旋律,因此人们对自己所处环境的安全要求就越来越高,特别是家居安全,不得不时刻留意不速之客的光顾。
现在许多小区都有着保安看管,但在一些农村就没有这些设施了,于是,许多家庭都安装了报警系统,这有效的保护了大家的财产安全。
在本文中,介绍一种利用热释电红外传感器进行监控,并进行报警的系统的设计。
热释电红外传感器,它的制作简单、成本低、安装比较方便,而且防盗性能比较稳定,抗干扰能力强、灵敏度高、安全可靠。
这种防盗器安装隐蔽,不易被盗贼发现,便于多用户统一管理。
本设计包括硬件和软件设计两个部分。
硬件部分包括单片机控制模块、红外探头模块、驱动执行报警模块、LED 控制模块等部分组成。
处理器采用51系列单片机STC89C52,程序使用C语言编写。
关键字:热释电红外传感器、STC89C52、红外线一、引言 0二、设计任务分析 0三、技术方案的详细设计(实施) (1)3.1本系统的设计方案 (1)3.1.1系统概述 (1)3.2硬件电路设计 (1)3.2.1红外感应部分 (2)3.3单片机部分 (7)3.3.1 STC89C52单片机简介 (7)3.3.2 单片机最小系统 (8)3.3.3按键控制电路 (9)3.3.4指示灯和报警电路 (10)3.4软件的程序实现 (10)3.4.1主程序工作流程图 (10)3.5 报警判断程序 (12)3.6 程序编写与调试 (12)3.7 硬件调试及调试中遇到的问题 (19)四、总结评价 (19)致谢 (20)参考文献 (20)附件一:总体原理图设计 (21)附件二:实物图 (22)附件三:程序源代码 (22)一、引言随着科技的提高,电子电器飞速发展,人民生活水平有了很大提高。