基于ANSYS的挖掘机械臂设计及有限元分析
基于ANSYS的滑移装载机动臂有限元分析与优化
基于ANSYS的滑移装载机动臂有限元分析与优化一、引言滑移装载机是目前应用较为广泛的一种工程机械,其具有灵活、高效的特点,能够适应不同地形和作业环境的需要。
而作为滑移装载机的重要组成部分之一的机动臂,其结构设计和性能优化对于整个机器的使用效果和使用寿命具有重要的影响。
在机动臂的设计过程中,采用有限元分析方法对其进行分析和优化,能够有效地提高机动臂的性能和使用寿命。
二、机动臂的结构和工作环境滑移装载机的机动臂一般由臂体、臂杆和液压缸等部分组成。
在工作时,机动臂需要承受较大的载荷和振动,因此对于机动臂的结构强度和耐久性有着较高的要求。
由于机动臂在工作过程中需要做出各种角度和位置的调整,因此在设计过程中还需要考虑其动力学性能和运动稳定性。
三、有限元分析的原理和方法有限元分析是一种结构分析的方法,通过将整个结构分割成有限个小单元,然后通过求解每个小单元的力学行为来得到整个结构的响应。
有限元分析技术在工程领域已经得到了广泛的应用,通过对结构进行有限元分析,可以得到结构的应力、位移、振动等性能指标,帮助设计人员优化结构设计。
本文将采用ANSYS软件对滑移装载机机动臂进行有限元分析。
首先需要建立机动臂的三维模型,然后将其网格化,最后通过施加载荷和边界条件,得到机动臂在不同工况下的应力、位移等性能指标。
1.建立机动臂的三维模型在进行有限元分析之前,需要先建立机动臂的三维模型。
通过CAD软件可以建立出相应的三维模型,并将其转换成ANSYS软件可以识别的格式。
2.网格化将三维模型分割成有限个小单元是有限元分析的第一步,也是最关键的一步。
通过ANSYS软件中的网格划分功能,可以将整个机动臂模型分割成有限个小单元,以便后续的分析。
3.施加载荷和边界条件在进行有限元分析之前,需要确定机动臂的工作条件和受力情况,在ANSYS中可以根据实际工况施加相应的载荷和边界条件,然后进行力学分析求解。
4.得到机动臂的应力、位移等性能指标通过有限元分析可以得到机动臂在不同工况下的应力、位移等性能指标,这些指标可以帮助设计人员评估机动臂的结构强度和稳定性,并进行相应的优化。
基于ANSYS的滑移装载机动臂有限元分析与优化
基于ANSYS的滑移装载机动臂有限元分析与优化引言滑移装载机(也称为滑移装载机)是一种用于装运和卸载材料的重型机械设备,通常用于建筑和土木工程领域。
其主要部件之一是动臂,用于支撑和操作斗齿进行装载工作。
为了提高滑移装载机的工作效率和安全性,有限元分析和优化成为了必不可少的工具。
本文旨在通过使用ANSYS软件对滑移装载机动臂进行有限元分析,并通过优化设计来提高其性能和寿命。
一、动臂结构分析1. 动臂结构设计滑移装载机动臂通常由钢材制成,具有复杂的结构形式,包括主梁、支撑臂、铰接部件等。
在设计动臂时需要考虑到承载能力、刚度、重量和成本等因素,以确保其具有足够的强度和刚度来承受工作中的压力和载荷。
在设计动臂结构时,需要注意材料的选择、横截面形状、轴向载荷和弯曲载荷的影响,以及动臂与其他部件之间的连接方式等因素。
2. 有限元建模有限元分析是一种工程仿真方法,通过将连续体划分成离散的小单元来进行模拟,用以研究结构在受力情况下的变形和应力分布。
在进行动臂有限元分析时,需要首先对动臂进行三维建模,然后进行网格划分和材料属性定义,最后设置载荷和边界条件进行仿真分析。
3. 动臂应力分析通过ANSYS软件进行动臂的有限元分析,可以得到动臂在不同载荷下的应力分布情况,包括主梁、支撑臂、铰接部件等关键部位的应力值和变形情况。
通过分析动臂的应力分布,可以找出结构的薄弱环节和受力不均匀的部位,为后续的优化设计提供重要的参考。
二、动臂优化设计1. 材料选择优化首先需要对动臂使用的材料进行优化选择,考虑到其强度、刚度、密度和成本等因素。
在保证动臂强度和刚度的前提下,选择尽可能轻量化的材料,以降低整个装载机的自重,提高其工作效率和节能性能。
2. 结构形式优化通过有限元分析得到的应力分布情况,可以对动臂的结构形式进行优化设计。
例如在关键部位增加加强筋、进行优化的横截面设计、改进铰接部件的连接方式等,来提高动臂的整体性能和寿命。
3. 疲劳寿命预测动臂在工作过程中会受到多种复杂载荷的作用,需要进行疲劳寿命预测来确保其安全可靠。
基于ANSYS的挖掘机动臂吊具的有限元分析
( 卡特彼勒徐州有 限公 司, 江苏 徐州 2 10 ) 20 4
摘 要 : 臂 的 平 衡 吊具 受 力较 复杂 , 不 规 则 , 简化 成杆 或 者 粱的 模 型 计 算其 理 论 强度 和 实际 工 况 误 差 较 动 且 而
大, 文章 利 用有 限 元 通 用软 件 A YS 用 多栽 荷 步 的 方 法 校核 其 强度 。 NS 采
1 建立 po 模型 re
图 2 导 入 选 项
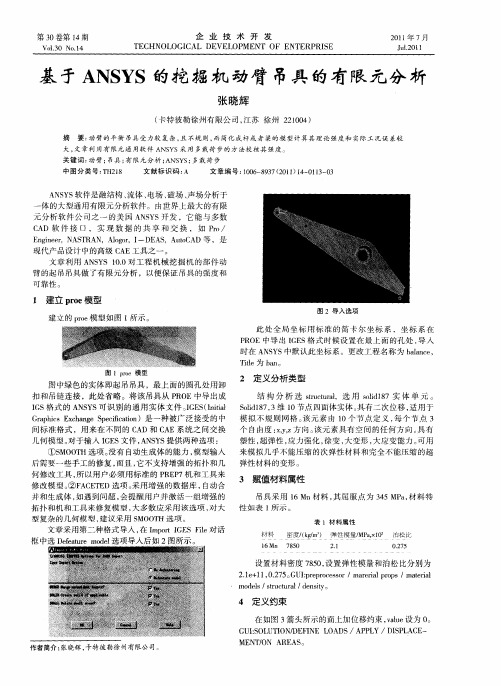
建立的 po 模 型如 图 1 r e 所示 。
此 处全 局坐标 用标 准 的笛 卡尔 坐标 系 .坐标 系在 PO R E中导 出 1 E G S格式时候设置在最上面的孑 处 , L 导入
时在 A S S中默认此坐标系。更改工程名称为 bl c , NY a ne a Tt 为 bn ie l a。
4 定义约束
在如图 3 头所示 的面上加位移约束 ,al设为 0 箭 vhe 。
G I O U I N D F N OA S/A P Y /DI P AC — U : L TO /E I E L D S P L SL E
MENT/ 0N A REAS
作者简介: 张晓辉 , 卡特彼勒徐 州有限公司。
第 3 卷第 1 期 O 4
V0 |O l3 No 1 .4
企 业 技 术 开 发
TECHNOLOGI CAL DEVELOPM ENT OF ENTERPRI SE
21 年 7 01 月
J 1 0 u. l 2 l
基于A Y NS S的挖 掘机 动臂 吊具 的 有限 元 分 析
堪 M l ¨ / x0 白 5 比
02 5 .7
设置材料 密度 7 5 , 80 设置弹性模量和泊松 比分别为
基于ANSYS液压挖掘机动臂的有限元分析_李丹

F " ’ " # 00 0 1 0 ’ # % ’ % / " /G % / 0 +& ’C D ! E !( & ,G & & 1& ( ) + , % $ " .0 H . % ; % # & , * *
#c #: : @A 7 5 )b2c D 4 D 8 5 @ 2U K 4 D K 7 L
基于 C D ! E ! 液压挖掘机动臂的有限元分析
李 ! 丹,周志鸿,刘瑞华
(北京科技大学 ! 土木学院设备系,北京 !* ) " " " # + ! 摘要 " J F J有限元方法进行静力 ! 对挖掘机动臂的一个 危 险 工 况 即 动 臂 位 于 最 低 位 置 工 况 # 使 用 \M 分析 # 包括计算模型的建立 $ 计算载荷的确定 $ 单元确 定 与 网 格 划 分 $ 数 据 分 析 等 # 得 出 动 臂 的 应 力 云 图 与应变图 # 可供动臂强度设计时参考 % ! 关键词 " ! 液压挖掘机 & 动臂 & 有限元分析 ! 中图分类号 "(2 文献标识码 ",!!! ! 文章编号 "* $ 0 ! *!!! ! " " * & & . /# ! " " # " % " " ’ . " &
" O 8 C! R (M%" ( &> $
!
) !
&^ ) !
C?D 6 N ! " C+ < . 6 * 式中 ! % % 铲斗液压缸作用 力 对 摇 臂 与 斗 杆 铰 点 6 *% 的力臂 &
基于ANSYS Workbench的挖掘机动臂有限元分析
考依据。
关 键 词 :动 臂 ;S o lid w o r k s ;A N S Y S W o r k b e n c h ;静 力 学 分 析
中 图 分 类 号 :T Q 422. 2 文 献 标 识 码 : A
文 章 编 号 :1 0 0 7 6 9 2 1 ( 2 0 1 7 ) 0 6 0 0 8 5 01
备制造业中的应用。
• 85 •
黄 鹏 ,等 • 杨 家 坪 滑 坡 稳 定 性 研 究
2017年 第 6 期
表3
稳定性计算结果
工况组合 1 2 3 4
稳定性系数 1 2029 1 2154 1 0568 1 1838
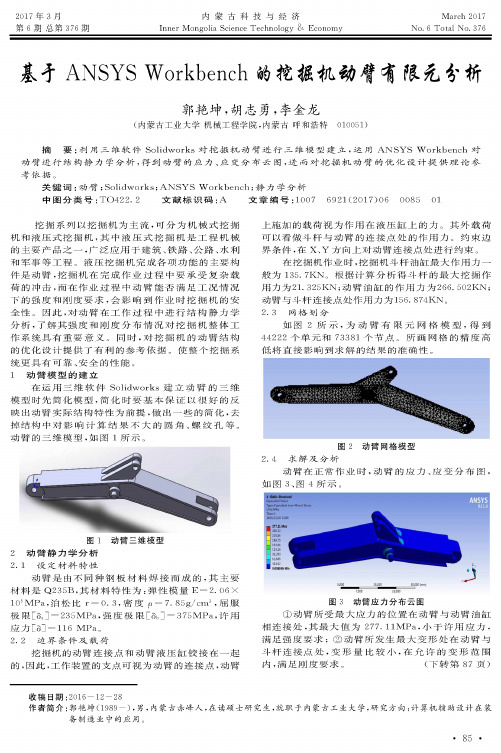
在 运 用 三 维 软 件 Solid w o rk s建 立 动 臂 的 三 维 模 型 时 先 简 化 模 型 ,简 化 时 要 基 本 保 证 以 很 好 的 反 映 出 动 臂 实 际 结 构 特 性 为 前 提 ,做 出 一 些 的 简 化 ,去 掉 结 构 中 对 影 响 计 算 结 果 不 大 的 圆 角 、螺 纹 孔 等 。 动 臂 的 三 维 模 型 ,如 图 1 所 示 。2
挖 掘 系 列 以 挖 掘 机 为 主 流 ,可 分 为 机 械 式 挖 掘 机 和 液 压 式 挖 掘 机 ,其 中 液 压 式 挖 掘 机 是 工 程 机 械 的 主 要 产 品 之 一 ,广 泛 应 用 于 建 筑 、铁 路 、公 路 、水 利 和 军 事 等 工 程 。液 压 挖 掘 机 完 成 各 项 功 能 的 主 要 构
如 图 2 所 示 ,为 动 臂 有 限 元 网 格 模 型 ,得 到 44222个 单 元 和 73381个 节 点 。所 画 网 格 的 精 度 高 低将直接影响到求解的结果的准确性。
基于ANSYS的有限元分析在机械结构上的应用
基于ANSYS的有限元分析在机械结构上的应用引言:机械结构的设计和分析是现代工程领域中非常重要的一环。
为了确保机械结构的安全性、可靠性和性能优化,传统的试错方法已经远远不够高效。
基于ANSYS的有限元分析技术则成为一种强大、可靠的工具,广泛应用于机械结构的设计、分析与优化。
本文将介绍基于ANSYS的有限元分析在机械结构上的应用,并探讨其优点和局限性。
1. 有限元分析的原理和基本步骤有限元分析是一种数值分析方法,将连续体划分为有限个单元,通过建立节点间的力学方程并求解,得出结构在不同载荷下的应力、位移等结果。
基本步骤包括几何建模、网格划分、材料属性定义、边界条件设置和求解结果分析等。
2. 实例:静力学分析以机械零件的静力学分析为例,利用ANSYS进行分析。
首先,进行几何建模,包括绘制零件的实体模型和确定边界条件。
接下来,通过网格划分将实体划分为单元,选择适当的单元类型和单元尺寸以保证计算精度。
然后,为每个单元分配适当的材料属性,包括弹性模量、泊松比等。
在设定边界条件时,要考虑结构的实际工作状况,如约束支撑和作用力的施加。
最后,进行静力学分析并分析结果,得出结构的应力分布和变形情况。
3. 动力学分析与振动模态有限元分析在机械结构的动力学分析中也有广泛应用。
动力学分析主要研究结构在外部激励下的振动响应。
通过ANSYS的有限元分析,可以预测结构的固有频率、模态形状和振动响应等。
这对于设计抗震性能优良的建筑物、减振器的设计等方面有着重要意义。
4. 热力学分析与热应力热力学分析是机械结构设计中的另一个重要领域。
通过ANSYS的有限元分析,可以模拟结构在热荷载作用下的温度分布和热应力。
这对于机械结构的材料选择、冷却系统设计等方面有着重要意义。
5. 优点与局限性基于ANSYS的有限元分析技术具有以下优点:- 高度准确性:有限元分析可以提供全面而准确的结果,能够实现对结构不同部分的局部分析。
- 设计迭代快速:与传统的试错方法相比,有限元分析可以快速进行多个设计迭代,从而实现最优设计。
基于Pro/E5.0和ANSYSWorkbench14.5的挖掘机动臂有限元分析
基于Pro/E5.0和ANSYSWorkbench14.5的挖掘机动臂有限元分析文章以反铲挖掘机的动臂为研究对象,对挖掘机最典型的几种工作状况进行分析,利用Pro/E和ANSYS Workbench两种CAE软件,先在Pro/E中建立了液压挖掘机动臂的三维模型,再对模型进行了强度分析和变形分析,给挖掘机动臂的设计提供了依据。
标签:挖掘机;工作装置;动臂;有限元前言挖掘机是工程建筑机械的主要机种之一,在建筑、交通、采矿、国防及城市建设等土石方施工中起着十分重要的作用。
随着应用范围的日益扩大,在设计理论和方法、分析和研究手段也有了质的飞跃。
本文利用PRO/E建立挖掘机的动臂模型,经Pro/E算出各铰点的受力情况,再利用ANSYS Workbench14.5对动臂的结构强度进行分析。
充分利用这2种CAE软件各自的特点,从而提高对问题的分析效率和计算精度。
1 动臂模型的建立反铲挖掘机的结构如图1所示,其工作装置主要有铲斗、铲斗液压缸、斗杆、斗杆液压缸、动臂以和动臂液压缸。
先对动臂实体结构特征进行分析,确定这些结构特征建立的先后顺序和每个实体特征的建立方法,保证模型所包含的参数尺寸尽量少,结构特征尽量简单。
分析和确定结构特征后,建立动臂模型。
Pro/E 提供了完整的建模功能,利用拉伸、旋转、切割、扫描、切除和抽壳等基本功能和曲面设计,建立工作装置的实体模型。
2 Pro/E与ANSYS对接3 动臂有限元分析3.1 定义单元属性、材料有关特性目前,绝大多数挖掘机的工作装置为不同厚度的16Mn钢材焊接而成,其屈服强度在275MPa附近。
Workbench实体单元类型采用默认的SOLID187,由于Workbench中没有16Mn,需添加新材料赋予新属性,设置动臂材料的基本参数如表1所示。
3.2 动臂网格划分一个好的网格非常重要,可以在求解过程中将误差降低到最小,避免引起数值发散和不正确得到不准确的结果,甚至还会导致不能求解。
基于ANSYS WORKBENCH的六自由度机械臂有限元分析及结构优化

1 六 自由度机械臂有 限元分析
1 . 1 有限元模型的建立
臂构 件 较 多且 等 效 简化 后造 型 简单 , 因此 可 以选 用Me c h a n i c a l , 网格 大 小 为 2 0 , 自动 网格 划 分 ,如 图1 所 示 ,节 点数 量 为4 7 4 4 2 ,单 元数 为2 2 8 1 2 。后
下 点 :
行 的可 靠 性 ,需 要 对 其 进 行 机 械 结 构 分 析 。近 年
来 对 机 械 结 构 的 分 析 已 经 从 结 构 静 力 学 延 伸 到 了
动 力 特 性 领 域 ,特 别 是 对 振 动 分 析 的 模 态 仿 真 已
1 )简 化 各种 连 接 ,将 齿轮 啮 合 简化 为 轴 和孔
姜振 廷 ,郑忠 才 ,董 旭
J l ANG Zh e n . t i n g,ZHENG Z h o n g . c a i , DO NG Xu
( 山东建筑大学 ,济南 2 5 0 1 0 1 )
摘 要 : 六 自由度机械臂作为机器人的 主要执 行机构 ,其机械性能决定 了工作的可靠性 。论文针对机械 臂的整体结 构进行 静力学特性和 振动特 性研究 ,基于A N S Y S WO R K B E N C H 的有 限元分析功 能 ,得到 了静 力学仿真和 模态仿 真的结果 ,并对 结果进行 了分析 ,在此基础 上对机械 臂进行 了减重优化 ,通过模态分析 ,验证 了优 化结果的可靠性。 关键 词 :机械臂 ;有限元 ;A N S Y S WO R K B E N C H
限 元分 析 。
软 件 中完 成 材 料 属性 的加 载 ,接 触 面 的 约 束 , 网
格 的 划 分 。 其 中 机 械 臂 连 接 部 分 及 夹 持 手 材 料 为 不 锈钢 , 弹性 模 量 l 9 3 G P a ,泊 松 比0 . 3 1 , 密度 7 7 5 0 k g / m。 ,其 他 部 分 等效 为硬 铝 合 金 ,弹 性模 量 7 1 GP a ,泊松 比0 . 3 3 ,密度 2 7 7 0 k g / m 。接 触面 选用 Bo n d e d 和N o S e p a r a t i o n 两种 面约 束 定义 , 由于 机械
基于ANSYS的挖掘机动臂吊具的有限元分析

基于ANSYS的挖掘机动臂吊具的有限元分析摘要:动臂的平衡吊具受力较复杂,且不规则,而简化成杆或者梁的模型计算其理论强度和实际工况误差较大,文章利用有限元通用软件ANSYS采用多载荷步的方法校核其强度。
关键词:动臂;吊具;有限元分析;ANSYS;多载荷步ANSYS软件是融结构、流体、电场、磁场、声场分析于一体的大型通用有限元分析软件。
由世界上最大的有限元分析软件公司之一的美国ANSYS开发,它能与多数CAD软件接口,实现数据的共享和交换,如Pro/Engineer, NASTRAN, Alogor, I-DEAS, AutoCAD等,是现代产品设计中的高级CAE工具之一。
文章利用ANSYS 10.0对工程机械挖掘机的部件动臂的起吊吊具做了有限元分析,以便保证吊具的强度和可靠性。
1建立proe模型建立的proe模型如图1所示。
图中绿色的实体即起吊吊具,最上面的圆孔处用卸扣和吊链连接,此处省略。
将该吊具从PROE中导出成IGS格式的ANSYS可识别的通用实体文件。
IGES (Initial Graphics Exchange Specification)是一种被广泛接受的中间标准格式,用来在不同的CAD和CAE系统之间交换几何模型。
对于输入IGES文件,ANSYS 提供两种选项:①SMOOTH选项。
没有自动生成体的能力,模型输入后需要一些手工的修复,而且,它不支持增强的拓扑和几何修改工具,所以用户必须用标准的PREP7机和工具来修改模型。
②FACETED选项。
采用增强的数据库,自动合并和生成体,如遇到问题,会提醒用户并激活一组增强的拓扑和机和工具来修复模型,大多数应采用该选项,对大型复杂的几何模型,建议采用SMOOTH选项。
文章采用第二种格式导入,在Import IGES File对话框中选Defeature model 选项导入后如2图所示。
此处全局坐标用标准的笛卡尔坐标系,坐标系在PROE中导出IGES格式时候设置在最上面的孔处,导入时在ANSYS中默认此坐标系。
基于ANSYS的滑移装载机动臂有限元分析与优化

基于ANSYS的滑移装载机动臂有限元分析与优化
滑移装载机动臂是一种用于装载和卸载物料的设备,广泛应用于建筑工地、港口、仓库等场所。
为了确保机动臂的稳定性和安全性,提高其工作效率和使用寿命,需要进行有限元分析与优化。
有限元分析是一种通过将结构离散成有限个单元,将其模型转化为离散状态,然后通过数学方法求解结构的应力、变形、振动等力学问题的方法。
使用ANSYS软件进行有限元分析与优化可以对机动臂的力学性能进行全面和准确的评估。
需要根据机动臂的实际结构进行建模。
可以将机动臂分为不同的部分,如臂体、伸缩管、液压缸等,并根据实际尺寸和材料参数进行建模。
然后,需要对机动臂受到的各种力进行加载,如自重、载荷、液压力等。
根据机动臂的实际工作条件和使用环境,选择适当的加载方式和加载位置。
然后,通过设置合适的边界条件,如固定支撑点、转动支撑点等,确定机动臂在有限元分析中的自由度。
通过求解有限元方程组,可以得到机动臂在不同加载情况下的应力和变形分布情况。
有限元分析结果的准确性和可靠性对于优化设计至关重要。
根据分析结果,可以识别出机动臂的设计弱点,并针对性地采取改进措施,如增加材料厚度、优化结构形状或增加支撑点等。
通过多次有限元分析和优化,最终得到稳定性更好、安全性更高、效率更高的机动臂设计方案。
在进行有限元分析与优化时,还需要考虑到机动臂的材料特性和工作条件。
如机动臂所使用的材料的强度、刚度、疲劳寿命等,以及机动臂在实际工作中受到的加载频次、加载方式、工作温度等。
这些因素将直接影响到分析与优化结果的准确性和可靠性。
基于ANSYS的液压挖掘机工作装置有限元分析

邵阳学院学报 ( 自然 科学版 )
J o u r n a l o f S h a o y a n g U n i v e r s i t y ( N a t u r a l S c i e n c e E d i t i o n )
3 .H y d r a u l c i T e c h n o l o g y I n s t i t t u e o f G u a n g x i Y u c h a i H e a v y I n d u s t r y C o . , L t d , Y li u n , G u a n g x i 5 3 7 0 0 5 , hi C n a )
we r e c lc a u l a t e d o u t ,w h i c h c a n c h e c k t h e s t r e n th g .T h e r e s u l t s o f f i n i t e e l e me n t a n a l y s i s s h o we d t h a t :b o o m’ S s t a t i c i n t e n s i t y v a l l
Ba s e d o n ANS YS
Z H A N G G u i — j u , X I A O C a i — y u a n , T A N Q i n g , MO Y o u — y u , L I H e n g — c h u n
( 1 . C o l l e g e o fMe c h a n i c a l a n d E l e c t r i c a l E n g i n e e i r n g ,C e n t r a l S o u t h U n i v e r s i t y , C an h g s a, h H u n a n 4 1 0 0 8 3 , C h i n a ; 2 . D e p a r t m e n t o fMe c an h i c a l a d n E n e r g y E n g i n e e r i n g , S h a o y a g n U n i er v s i t y , S h a o y a g, n H u n a n 4 2 2 0 0 0 , C h i a; n
基于ANSYS的滑移装载机动臂有限元分析与优化

基于ANSYS的滑移装载机动臂有限元分析与优化滑移装载机动臂是一种工程机械设备,用于在建筑工地、矿山等场合进行土方作业。
在使用过程中,动臂承受着巨大的荷载和工作负荷,因此需要进行有限元分析与优化来确保其结构的强度和稳定性。
ANSYS是一款常用的工程有限元分析软件,可以对装载机动臂进行结构分析,找出潜在的设计问题并进行优化。
下面将介绍基于ANSYS的滑移装载机动臂有限元分析与优化的步骤和方法。
第一步是建立动臂的有限元模型。
通过CAD软件绘制出动臂的三维模型,并将其导入到ANSYS中。
然后,根据实际情况对动臂进行离散化处理,将其分割成有限元单元,包括梁单元和壳单元。
梁单元用于表示动臂的主要结构部分,壳单元用于表示较薄的板材或薄壳结构,如活塞。
第二步是对动臂进行边界条件的定义。
这包括约束条件和加载条件。
约束条件用于限制动臂部分的位移和旋转,以模拟实际工作状态。
加载条件用于模拟动臂承受的荷载,包括静态荷载和动态荷载。
静态荷载可以通过沉降荷载、施加力矩等方式加在动臂上,动态荷载可以通过模拟工作过程中的振动荷载来加在动臂上。
第三步是进行有限元分析。
在ANSYS中,可以选择不同的求解器和求解方法对动臂进行分析。
常见的求解器包括静力分析、模态分析、疲劳分析等。
根据实际需要,选择合适的求解器来对动臂进行分析,并获取其应力、应变、振动等结果。
根据分析结果,可以找出动臂的潜在问题,如应力过大、振动过大等。
第四步是对动臂进行优化。
根据分析结果,可以对动臂的结构进行优化,以提高其强度和稳定性。
优化的方法包括结构参数优化、材料参数优化等。
结构参数优化可以通过调整梁单元的尺寸、形状等来改善动臂结构;材料参数优化可以通过选择合适的材料来提高动臂的强度和刚度。
通过不断进行优化,可以找到一个最佳的设计方案,以满足动臂工作的要求。
对优化后的设计方案进行验证。
将优化后的设计方案重新导入到ANSYS中,进行有限元分析,以验证其在实际工作条件下的性能。
基于ANSYS的滑移装载机动臂有限元分析与优化

基于ANSYS的滑移装载机动臂有限元分析与优化滑移装载机动臂是重型机械设备,常用于物料的装卸和运输,具有载重能力强、工作效率高等特点。
然而,在长时间的使用过程中,由于外力的作用和自身结构的材料损伤等因素,动臂易受到疲劳和断裂的损害,因此需要进行有限元分析和优化。
有限元分析是一种数值分析技术,可以对结构件进行力学分析和变形分析,以预测其在实际工作中受到的载荷和应力等情况。
在本研究中,我们基于ANSYS有限元软件,对滑移装载机动臂进行了有限元分析。
首先,我们建立了动臂的三维实体模型,并将其导入ANSYS软件中。
然后,根据实际工作情况,我们对动臂的载荷进行了设定,包括静态载荷和动态载荷。
其中,静态载荷指的是动臂长时间停留在一定位置下的载荷,而动态载荷则是指动臂在高速运转时所受到的载荷。
接下来,我们对动臂的材质和初始状态进行了设置,包括材料的模型和材料的物理参数。
然后,我们对动臂进行了网格划分,并对网格质量进行了检查和调整,以保证模型的精度和稳定性。
随后,我们进行了计算求解,得到了动臂的应力、变形和应变等结果。
结果显示,动臂在受到静态载荷和动态载荷的情况下,其应力和应变值均超过了材料的极限强度和变形极限,存在断裂的风险。
因此,我们进行了优化设计,希望降低动臂的应力和应变,以提高其使用寿命和安全性。
在优化设计中,我们采用了两种方法,分别是减少载荷和增加材料强度。
对于减少载荷,我们优化了动臂的结构,改变了管道的布局和长度,将一部分载荷分配给其他部件。
对于增加材料强度,我们考虑了更换材料和加强材料厚度等措施,最终确定了一种新的材质和厚度。
总之,基于ANSYS的有限元分析和优化设计是一种有效的手段,可以帮助我们预测和优化结构件的力学性能,为提高机械设备的使用寿命和安全性提供有力支持。
基于ANSYS的挖机动臂强度分析报告

基于ANSYS的挖机动臂强度分析报告1.概述:基于ansys软件对挖机动臂进行有限元分析,校核了动臂在几处铰孔载荷下的强度和刚度,最终计算表面,满足强度要求。
几何模型如下所示:图1 几何模型2.有限元建模动臂结构较为复杂,存在倒角、铰孔、凸台等不规则特征,所以采用四面体建模,单元类型选用solid185。
solid185单元用于构造三维固体结构.单元通过8个节点来定义,每个节点有3个沿着xyz方向平移的自由度.单元具有超弹性,应力钢化,蠕变,,大变形和大应变能力.还可采用混合模式模拟几乎不可压缩弹塑材料和完全不可压缩超弹性材料。
图2 solid185单元类型动臂结构材料为Q345,其弹性模量为 2.1e5MPa,泊松比为0.3,材料的屈服极限为345MPa。
如下图所示。
图3 材料属性对动臂结构进行网格划分,采用自由划分,网格为四面体结构。
如下所示,在铰孔等特征处需要对网格进行局部加密,因为这些为主要受力区域,会出现一定程度的应力集中,所以网格需要加密,同时圆孔需要加密网格才能体现出圆弧的特征,如果网格较小,圆孔体现出的是多边形特征,则此时结构的实际情况会失真。
图4 网格模型最终网格总数为42804,节点总数为9479。
3. 载荷约束对动臂结构进行约束加载,动臂结构在实际工作中并没有固定约束部分,处于动平衡状态,主要受到连接铰孔的外载荷,但是有限元求解必须要消除刚体位移,结构不能处于动平衡状态,结构必须为静定或者超静定结构,所以可以通过对动臂结构上某些节点施加约束,所施加的约束刚好可以消除结构的全部刚体自由度,同时也不会对动臂引起附加约束,如果直接在动臂节点上施加约束,由于约束本身会引起附加刚度,所以这样必然会影响计算结果,所以通过弹簧的方式,在节点上建立对地弹簧,约束弹簧端部,通过调整弹簧刚度来避免约束节点对结构产生的附加刚度,同时还可以通过约束弹簧端部来消除刚体位移,如下图所示,同时打开惯性释放。
基于ANSYS的滑移装载机动臂有限元分析与优化

基于ANSYS的滑移装载机动臂有限元分析与优化近年来,滑移装载机在工程建设和土木工程领域得到了广泛的应用,其主要结构之一是动臂。
动臂作为滑移装载机的重要组成部分,承担着机器负载和挖掘力的传递任务,因此其结构设计至关重要。
有限元分析是一种有效的工程分析方法,可以帮助工程师优化结构设计并提高其性能。
本文将基于ANSYS软件对滑移装载机动臂进行有限元分析与优化,并探讨其在工程实践中的应用。
1. 动臂的结构和工作原理滑移装载机动臂是机器的重要组成部分,主要用于挖掘、卸载和搬运物料。
其结构主要包括臂筋、附着点、反铲等部件,通过液压缸驱动实现伸缩和抬升。
在工作过程中,动臂需要承受不同方向的受力作用,因此其结构设计至关重要。
2. 有限元分析的原理有限元分析是一种工程分析方法,通过数值计算模拟结构的受力情况,可以预测结构在不同载荷下的变形和应力分布。
其基本原理是将结构划分为有限个单元,对每个单元进行力学分析,并通过计算得出整个结构的受力情况。
有限元分析可以有效地帮助工程师优化结构设计,提高结构的性能。
3. ANSYS软件简介ANSYS是一款强大的有限元分析软件,可以模拟各种结构的受力情况,并对结构进行优化设计。
其功能强大,界面友好,深受工程师的喜爱。
在本文中,我们将使用ANSYS软件对滑移装载机动臂进行有限元分析和优化。
4. 滑移装载机动臂的有限元分析我们需要建立滑移装载机动臂的有限元模型。
在建模过程中,需要考虑到动臂的结构特点和受力情况,合理划分单元,设置边界条件和载荷。
然后,通过ANSYS软件进行受力分析,得出动臂在不同载荷下的变形和应力分布情况。
通过有限元分析,可以发现动臂的受力集中部位和应力集中区域,为结构优化提供依据。
5. 滑移装载机动臂的优化设计通过有限元分析,我们可以了解到滑移装载机动臂的受力情况和结构弱点,进而进行优化设计。
优化设计的目标是减小动臂的变形和应力集中,并提高其整体性能。
可以采取的优化措施包括增加材料厚度、改变结构形状、调整附着点位置等。
基于ANSYS的滑移装载机动臂有限元分析与优化

基于ANSYS的滑移装载机动臂有限元分析与优化
滑移装载机动臂是一种用于搬运和装载重物的机械设备,常用于建筑工地、码头、仓库等场所。
它的动臂是其关键部件之一,承担着承载和作业的重要功能。
在设计和制造滑移装载机动臂时,我们需要考虑其结构的强度和稳定性,以确保其在各种工况下能够正常运行并完成作业任务。
有限元分析与优化成为了不可或缺的工具。
有限元分析是一种数值计算方法,通过将结构离散为有限数量的单元,利用数学模型对结构进行数值求解,得到结构在各种工况下的应力、位移等响应。
在滑移装载机动臂的有限元分析中,我们可以建立一个包含动臂主梁、液压缸等关键部件的三维模型,并对其进行网格划分,然后采用ANSYS等有限元分析软件对其进行求解。
在进行有限元分析之后,我们可以得到动臂在不同工况下的应力和位移分布。
通过分析这些结果,我们可以评估动臂在工作中是否存在过载、变形等问题,并找到引起这些问题的主要原因。
在优化滑移装载机动臂结构时,我们可以通过有限元分析结果进行参数优化或结构改进。
如果发现某个部件承受的应力过大,我们可以通过增大材料的强度或增加其尺寸来改善结构的强度。
或者,我们也可以对动臂的结构进行优化设计,例如改变截面形状、调整关键连接处等,以提高结构的稳定性和刚度。
基于ANSYS的滑移装载机动臂有限元分析与优化可以帮助我们全面了解和评估动臂的性能,并为其结构的设计和制造提供指导。
通过优化设计,我们可以提高动臂的工作效率和可靠性,提高整个滑移装载机的性能。
基于ANSYS的装载机立式动臂的有限元分析及优化设计

基于ANSYS的装载机立式动臂的有限元分析及优化设计刘志鹏(龙工(上海)机械制造有限公司,上海 201612)摘要:依据装载机的作业特点,对立式动臂在铲掘位置进行静力学有限元分析,计算出动臂的应力分布云图,并在有限元分析结果的基础上提出动臂结构的改进方案。
优化后的仿真结果表明,在保证动臂满足工作性能要求的前提下,经优化设计后的动臂受力情况和结构形状得到了合理的改善。
该基于ANSYS 的有限元分析和优化设计方法提高了设计速度和设计质量,降低了生产成本。
关键词:装载机;立式动臂;静力学;有限元分析;优化设计中图分类号:TH243 文献标志码:A doi:10.3969/j.issn.1006-0316.2017.03.016 文章编号:1006-0316 (2017) 03-0059-04Finite Element Analysis and Optimization Design of Vertical Movable Arm of LoaderBased on ANSYSLIU Zhipeng( Lonking (SHANGHAI) Machinery Co., Ltd., Shanghai 201612, China )Abstract:According to the working characteristics of loader, the static finite element analysis is performed in the shoveling and digging position for vertical movable arm, and the stress distribution is calculated. Base on the analysis result, the improved design is put forward. The simulation result after optimization shows that forces and structural shapes of the movable arm are improved after being optimized on the premise of meeting requirement of the movable arm’s work performance. The method of finite element analysis and optimization design based on ANSYS improves design speed and quality, reduces manufacturing costs.Key words:loader;vertical movable arm;static;finite element analysis;optimization design 动臂是装载机的关键结构件,其结构强度及受力情况直接影响装载机的性能优劣[1]。
基于ANSYS的滑移装载机动臂有限元分析与优化
基于ANSYS的滑移装载机动臂有限元分析与优化滑移装载机动臂是一种常见的工程机械设备,广泛用于土方工程、矿山作业等领域。
在机械装载作业中,动臂是承受最大力的部件之一,因此对其进行有限元分析与优化是非常必要的。
有限元分析是一种常用的工程分析方法,可以模拟和分析复杂结构的力学性能。
在本文中,我们将基于ANSYS软件对滑移装载机动臂进行有限元分析,并通过优化方法对其进行优化,以提高其结构的强度、刚度和可靠性。
我们需要进行零件的建模和网格划分。
基于机动臂的实际几何尺寸进行建模,并使用ANSYS提供的网格划分工具将其划分为有限元网格。
在划分网格时,需要考虑到几何尺寸、材料性质和加载条件等因素,以尽可能准确地模拟实际工作条件。
接下来,我们可以进行静态和动态分析。
静态分析可以模拟机动臂受力情况下的位移、应力和变形等参数,从而评估其结构的强度和刚度。
动态分析可以模拟机动臂在工作过程中的振动响应和动力学性能,以评估其可靠性和安全性。
通过静态和动态分析,我们可以得到机动臂的受力情况和受力部位。
根据这些结果,我们可以对机动臂的结构进行优化。
优化的目标可能是最小化应力和变形,或者最大化刚度和承载能力。
通过调整机动臂的几何形状、材料选择和结构参数等方面,我们可以得到一个优化的设计方案。
在优化过程中,我们可以使用ANSYS软件提供的优化工具,如拓扑优化、形状优化和参数优化等方法。
这些方法可以通过自动迭代和优化算法,寻找最优的设计方案,并在满足设计要求的前提下减小结构的重量和材料消耗。
我们可以对优化后的设计方案进行验证。
通过再次进行有限元分析,我们可以评估优化后的机动臂是否满足设计要求,同时可以比较优化前后的差异,以验证优化的有效性。
基于ANSYS Workbench的挖掘机动臂模态分析
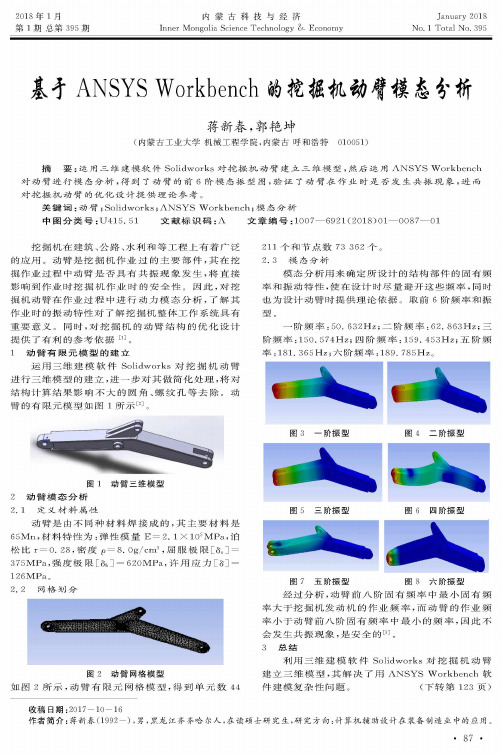
2018年1内蒙古科技与经January2018第 1 期总第 395 期 InnerMongoliaScienceTechnology&EconomyNo. 1 Total No. 395ANSYS Workbench [挖掘机E 臂媒态?祈蒋,郭艳坤(内蒙古工业大学机械工程学院,内蒙古呼和浩特010051)摘要:运用三维建模软件S o lid w o rk s 对挖掘机动臂建立三维模型,然后运用A N S Y S Workbench对动臂进行模态分析,得到了动臂的前6阶模态振型图,验证了动臂在作业时是否发生共振现象,进而对挖掘机动臂的优化设计提供理论参考。
关键词:动臂;Solidworks ; A N S Y S Workbench ;模态分析中图分类号:U 415.51文献标识码:八文章编号:1007—6921(2018)01—0087—01挖掘机在建筑、公路、水利和等工程上有着广泛 的应用。
动臂是挖 作业过的主要部件,其在挖作业中动臂是 有共振现象发生,将直接作业时挖 作业时的安全性。
,对挖动臂在作业中进行动态分析,了解其作业时的振动特性对了解挖 整体工作有要意义。
同时,对挖 的动臂的优化设计提供了有利的参考依据[1]。
1 动臂有限元模型的建立三维建模软件S o lid w o r k s 对挖掘机动臂进行三维模型的建立,进一步对化处理,将对计 果大的圆角、螺纹除。
动臂的有限型如图1所示[2]。
图1动臂三维模型2 动臂模态分析2.1定义材料属性动臂是种材料焊接成的,其主要材料是65M n ,材料特性为:弹性模量E =2.1X 105M P a ,泊 松比r = 0. 28,密度p = 8. 0g /c m 3,屈服极限[&]= 375M P a ,强度极限[知]= 620M P a ,许用应力[$] = 126M P a 。
2. 2网格划分图2动臂网格模型如图2所示,动臂有限 格模型,得到单元数44211个和节点数73 362个。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
M6
M4
M7
手抓 手抓电机
蜗杆
图 1 机械臂简图 动臂是反铲工作装置的主要部件,本设计采用整体式动 臂,结构简单,质量小而刚度大,适用于长期作业[4]。整体式动 臂又可分为直动臂和弯动臂两种,其中的直动臂结构简单、质 量小、制造方便,主要用于悬挂式液压挖掘机,但不能使挖掘 机获得较大的挖掘深度,不适用于通用挖掘机;弯动臂与同长 度的直动臂相比,可以使挖掘机有较大的挖掘深度,但降低了 卸土高度,这正符合挖掘机反铲作业的要求,本设计采用弯动
道,1998,(5):18- 21. [2] 谭 蔚,张晋军,朱雨峰. 多支座卧式容器应力计算方法的分析[J].
压力容器,2004,(9):13- 16. [3] 陈志伟,寿比南,郑津洋. 大型多鞍座卧式容器设计方法分析[A].
第六届全国压力容器学术会议压力容器先进技术精选集 [C]. 北 京:机械工业出版社, 2005.
臂结构。
2 机械臂结构的有限元分析
建立受力模型和约束模型,机械臂旋转盘完全约束在地 面上,如图 2 和图 3 所示。
1 挖掘机械臂结构设计
挖掘机械臂由动臂、动臂驱动电机、斗臂、斗臂驱动电机 等组成。采用的是螺杆式连接的摆动结构。采用该设计的优点 有二:
(1)可使螺母平稳移动,从而带动动臂与斗臂一起摆动, 使机械臂到达预定位置,方便、简洁[3]。
CHEN Tao (Taizhou Institute of Science and Technology, NJUST, Taizhou Jiangsu 225300,China)
Abstract:The paper designs the structure of a kind of mining mechanical arm of more tracked robot using fischertechnik. It also builds the three- dimensional entity model of the mining mechanical arm with Pro/E software. Finite element analysis has been accomplished using the ANSYS software. Stress and displacement were of the mechanical arm has been obtained. The paper analyses the influence of the stress concentration for the structure of the mining mechanical arm, and looks for the optimization method to the structure of the mining mechanical arm, and it also builds the foundation for further research. Keywords:mechanical arm; structure; design; finite element analysis; ANSYS
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
(上接第 68 页)
6 结束语
当卧式容器的底座中心在同一直线上时,如 MSR、海水 淡化设备、硫化罐等,容器简化为弯曲梁,此时可以使用三弯 矩方程,也可以使用有限元方法进行计算,两者的结果相差 不大。
参考文献: [1] 黄 铭. 多支座卧式容器的受力分析和强度计算 [J]. 化工设备与管
69
Equipment Manufactring Technology No.1,2011
参考文献: [1] 罗庆生,韩宝玲. 现代仿生机器人设计[M]. 北京:电子工业出版社,
2008. [2] 曲 凌.慧鱼创意机器人设计与实践教程[M]. 上海:上海交通大学
大学出版社,2007.
[3] 张建民.工业机器人[M]. 北京:北京理工大学出版社,1992. [4] 刘宏伟.基于 ADAMS 的五自由度机器人运动学仿真[J].机电产
Analysis on Multi- support Horizontal Cylindrical Vessel
CHU Ling- mo (Harbin Electric Corporation Modern Manufacturing Service Industry Co., Ltd., Harbin 150040, China)
Abstract: This article sets horizontal cylindrical vessel with multi- support as an example, the distribution of pedestal force reaction for horizontal cylindrical vessel is analyzed by using Three Moment of Flexure Method and Finite Element Analysis and the two results are compared, here is the solution, it is correct to use Finite Element Analysis. Key words: horizontal cylindrical vessel; pedestal force reaction; three moment of flexure method; finite element analysis
中图分类号:TH164
文献标识码:A
文章编号:1672- 545X(2011)01- 0069- 02
随着科学技术的发展,机械手已经广泛应用于各个领域, 将操作人员从繁重、单调和重复的体力劳动中解放出来。特别 是在高温、危险及有害的作业环境中,可用机械手臂代替人的 部分操作[1]。因此对机械手臂的分析研究,是非常有意义的。笔 者利用慧鱼创意组合模型,对挖掘机械臂进行了结构设计,并 利用 ANSYS 软件进行有限元分析,为后续研究奠定了基础[2]。
《装备制造技术》2011 年第 1 期
基于 ANSYS 的挖掘机械臂设计及有限元分析
陈涛
(南京理工大学 泰州科技学院,江苏 泰州 225300)
摘 要:用慧鱼创意组合模型对多功能履带式机器人的挖掘机械臂进行了结构设计,应用 Pro/ E 软件建立了三维实体模型,利用 ANSYS 软件进行有限元分析,得出了机械臂的应力位移分析图,并分析了应力集中对结构的影响及优化方法,为后续研究奠定了基础。 关键词:机械臂;结构;设计;有限元分析;AN SYS
70
利用 ANSYS 软件进行有限元分析,结果如图 4 所示。图
中机械臂的手抓前端部分为应力(位移)最大的区域,其余部
分应力(位移)逐渐减小,经过分析最大应力为 2.66 MPa,最大
位移为 1.1 mm,可以看出变形比较大。在机器人进行越障时,
经常会在应力大的地方断裂,因为在弯动臂连接处的凸起物
的横截面积很小,应力最大,所以是最容易断裂的地方。
品开发与创新,2008,6(21):42- 44. [5] 王 霞,李占军,王 平. 基于 ADAMS 的六自由度机械手的运动仿
真分析[J].矿山机械,2010,(8):28- 30.
Design and Finite Element Analysis for a Kind of Mining Mechanical Arm based on ANSYS
图 4 机械臂结构的应力和位移分析
3 结束语Байду номын сангаас
通过上述分析,掌握了挖掘机械臂的应力位移分布,通过 改变机械臂材料,可优化其性能,减小位移量,提高刚性,为今 后机械臂的设计研究奠定了基础[5]。
收稿日期:2010- 10- 21 作者简介:陈 涛(1981—),男,江苏南通人 ,讲师,研究方向为数控技术。
(2)螺杆传动比高,可实现较大的力的输出,在越障时可 以模拟挖掘机的越障功能,利用机械手臂把车身前端翘起,越 上障碍物,机械手旋转 180°,利用机械手撑起车身,履带行进 可轻松越过障碍物。结构简图如图 1 所示。
螺杆 螺母 斗臂
次斗臂电机
斗臂电机
M5
减速器
动臂
动臂电机 减速器
图 2 受力模型
图 3 约束模型