控制工程实验-第7章
自动控制原理第7章_非线性控制系统
7.2 相平面法
1. 基本概念 2. 相平面图的绘制 3. 线性系统的相轨迹 4. 非线性系统的相平面分析
7.2 相平面法
1. 基本概念 相平面法是一种求解二阶常微分方程的图解方法。 1) 相平面图 f ( x, x ) 0 x 二阶系统的数学描述 ,得下列一阶微分方程组 设x1=x,x2= x
非线性系统一般理解为非线性微分方程所描述的
系统。 线性系统的本质特征是叠加原理,因此非线性系 统也可以理解为不满足叠加原理的系统。
7.1 概述
2. 典型的非线性特性
1) 饱和特性
2) 死区特性
3) 间隙特性(滞环特性)
4) 变放大系数特性
5) 继电器特性
7.1 概述
1) 饱和特性
x(t) k 0 a e(t)
数学表达式
ke(t ) x(t ) ka signe(t )
1 signe(t ) 1 不定
e(t ) a e(t ) a
-a
符号函数(开关函数)
e(t ) 0 e(t ) 0 e(t ) 0
图 7.2 饱和特性
a – 线性域宽度 k – 线性域斜率
(d)半稳定极限环
(a) 可通过实验观察到。设计时应尽量减少极限环 的大小,以满足系统的稳态误差要求。
(b) 不能通过实验观察到。设计时应尽量增大极限 环的大小,以扩大系统的稳定域。
(c)、(d)不能通过实验观察到。(c)不稳定。(d)稳 定,但过渡过程时间将由于极限环的存在而增加。
7.2 相平面法
单输入-单输出的线性定常系 统
现代控制理论(20世纪50 年代后)
可以是比较复杂的系统
现代控制理论基础 第7章 状态空间分析法在工程中的应用

h2
特征多项式
1 0
0 1
1
w
0
u
h02 h1 h0h1 h2
y
11 0 1 h0h2 11h1
h0
x1
w
h1
y
h2
I (A11 hA21) 3 h02 (11 h1) (11h0 h2 )
期望极点-3, -2+j, -2-j;期望特征方程
g0 9, g1 42, g2 148, g3 492
状态反馈
12
五、降维观测器设计
由于小车位移z可测,无需估计,可用降维观测器进行设计。重新排列系统状 态变量次序,把需由降维观测器估计的变量与可观测的变量分开,则状态方程 和输出方程为
d dt
•
z
•
--z--
0 1 0 0
第七章 状态空间分析法在工程中的应用
第一节 单倒置摆系统的状态空间设计 第二节 大型桥式吊车行车系统的状态空间设计 第三节 液压伺服电机最优控制系统
1
线性控制理论在工程设计中应用最广泛的是状态空 间综合方法,也就是状态反馈与状态观测器的相关理论 与方法。本章通过三个工程实例予以说明状态空间分析 方法的具体应用。
3
若不给小车施加控制力,是一个不稳定系统。 控制的目的是,当倒置摆无论出现向左或向右倾倒时,通过控制直
流电动机使小车在水平方向运动,将倒置摆保持在垂直位置上。
4
一、倒置摆的状态空间描述
根据牛顿定律
M d 2z m d 2 (z l sin ) u
dt 2
dt 2
由于绕摆轴旋转运动的惯性力矩应与重力矩平衡,因而有
(6-3) (6-4)
联立求解
..
咨询工程师工程项目组织与管理第七章 工程项目投资控制第七章 基础练习题综合练习与答案

咨询工程师工程项目组织与管理第七章工程项目投资控制第七章基础练习题综合练习与答案一、单选题1、如果出现ACWP>BCWS>BCWP,SV<0,CV<0的情况,那么要采取的最佳措施是()。
A.若偏离不大,维持现状B.用工作效率高的人员更换一批工作效率低的人员C.抽出部分人员,放慢进度D.增加高效人员投入【参考答案】:B【试题解析】:本题考查的是费用控制的方法。
通过观察挣值法参数分析与对应措施表可知,出现这种情况是由于效率低,进度较慢,投入延后,所以此时应当用工作效率高的人员更换一批工作效率低的人员。
参见教材P378。
2、()终止后,承包人应按照合同约定向发包人提交最终结清支付申请。
A.缺陷责任期B.工程竣工验收C.保修期D.竣工结算后【参考答案】:A【试题解析】:考点:最终结清。
缺陷责任期终止后,承包人应按照合同约定向发包人提交最终结清支付申请。
3、某工程项目场地平整所花的费用应计入()。
A.基本预备费B.建筑工程费C.安装工程费D.生产准备费【参考答案】:B【试题解析】:考点:建设工程项目投资的概念。
建筑工程费是指建设工程涉及范围内的建筑物、构筑物、场地平整、道路、室外管道铺设、大型土石方工程费用等。
4、编制按时间进度的费用计划,通常可利用控制项目进度的()进一步扩充而得。
A.网络图B.费用计划表C.资源消耗计划D.项目成本分析【参考答案】:A【试题解析】:考点:工程项目费用目标的分解。
编制按时间进度的费用计划,通常可通过对控制项目进度的网络图进行进一步扩充而得。
5、进行工程项目费用控制的工作包括:①比较,②预测,③检查,④分析,⑤纠偏。
正确的顺序是()。
A.①—②—③—④—⑤B.①—④—②—⑤—③C.①—③—④—②—⑤D.①—②—④—⑤—③【参考答案】:B6、纳税人所在地为市区,城市维护建设税税率为()。
A.1%B.3%C.5%D.7%【参考答案】:D【试题解析】:本题考查的是建筑安装工程费项目的组成。
控制工程基础—第7章控制系统的误差分析与计算

ss 0
(3)Ⅱ型系统(N=2)
静态位置误差系数为Kp=∞,稳态误差ss=0。 图7-4 所示为单位反馈控制系统的单位阶跃响应 曲线,其中图7-4a为0型系统;图7-4b为Ⅰ型或 高于Ⅰ型系统。
图7-4 单位阶跃响应曲线
2. 静态速度误差系数Kv 系统对斜坡输入X(s)= R/s2的稳态误差称为速度误 差,即
图7-6 单位加速度输入的响应曲线
表7-1 单位反馈系统稳态误差 ss 输入信号 系统 类型 阶跃 x(t)=R
R 1 K
斜坡 x(t)=Rt
R K
加速度
R 2 x( t ) t 2
0型 I型 Ⅱ型
R K
0 0
0
三、其它输入信号时的误差
如果系统承受除三种典型信号之外的某一信号x(t) 输入,此信号x(t)在t=0点附近可以展开成泰勒级 数为 :
1 R R ss lim s . 3 2 s0 1 G( s ) s lim s G ( s )
s0
( 7-20 )
静态加速度误差系数Ka定义为:
K a lim s G( s )
2 s 0
( 7-21 ) ( 7-22 )
所以
R ss Ka
(1) 0 型系统(N=0)
稳态误差 对式(7-5)进行拉氏反变换,可求得系统的误差 (t) 。对于稳定的系统,在瞬态过程结束后,瞬 态分量基本消失,而(t)的稳态分量就是系统的 稳态误差。应用拉氏变换的终值定理,很容易求 出稳态误差:
E ( s) ss lim ( t ) lim s ( s ) lim s t s0 s0 H ( s)
K v lim sG ( s )
第7章工程施工进度控制

10周末检查时工作G拖后1周,但不影响工期
E.在第5周到第10周内,工作F和工作I的实际进度正常
答案:BD。
某分部工程双代号时标网络计划执行到第2周末及第8周末时 ,检查实际进度后绘制的前锋线如下图所示,图中表明( )。
A.第2周末检查时,A工作拖后1周,F工作变为关键工作 B.第2周末检查时,B工作拖后1周,并影响工期1周 C.第2周末检查时,C工作按匀速进展,完成其任务量的20% D.第8周末检查时,D工作拖后2周,并影响工期1周 E.第8周末检查时,E工作拖后1周,并影响工期1周 答案:AE。
7.3施工进度控制的措施和过程
7.3.1施工进度控制的措施 (1)组织措施 组织措施主要包括: 1)落实施工进度控制的部门及具体人员,进行控
制任务和管理职责的分工; 2)进行项目详细分解,建立进度计划编码体系; 3)确定施工进度协调工作制度,包括会议制度、
协调制度、统计报告制度等; 4)分析影响进度目标实现的风险因素,采取控制
问题: 1. 求出12个月的挣得值; 2. 求出12个月的CV和SV; 3. 求出12个月的CPI、SPI并分析成本和进度情况。
解:1. 计算结果如下表
4150
2750
200 294 279 470 310 473 240 145 240 312 189 180 3332
2. 12个月的ACWP为2750万元,BCWS为4150万元。 费用偏差:CV= BCWP-ACWP=3332-2750=582万 CV为正,说明费用节支;
进度偏差:SV= BCWP-BCWS =3332-4150= -818 SV为负,说明进度延误。
3. 费用绩效指数:CPI= BCWP/ACWP=1.212, 由于CPI>1,故费用节支;
机械工程控制基础 第七章 控制系统的稳定性

第七章 控制系统的稳定性第一节 稳定性的概述 一、系统稳定性概念定义:当使它偏离初始的平衡状态或稳定响应的扰动(干扰)去除以后,系统能以足够的精度恢复到初始的平衡状态或稳定响应状态中。
二、系统稳定的充要条件对于一般系统,其运动微分方程总可以写成如下形式(以此说明判据来源))()()(()()()(1)1(1)(0001)1(01)(00Xb t X b t X b t X b X a t X a t Xa t Xa m i m m i m i n n n n ++⋅⋅⋅++=++⋅⋅⋅++∙--∙--当扰动去除后,即0)(=t X i时,上式变为齐次微分方程,即:0)()()()(001)1(01)(00=++⋅⋅⋅++∙--t X a t X a t Xa t Xa n n n n设解为stAe t X =)(0,特征方程为01110=++⋅⋅⋅++--n n n n a S a S a S a(可求出n 个根n i S i⋅⋅⋅=2,1,)齐次方程的通解形式为t s n t s n t s t s n n e A e A e A e A t X ++⋅⋅⋅++=--1211210)(系统稳定的充要条件是:0)(lim 0=∞→t X t ,即n i e ti s t ⋅⋅⋅==∞→2,1,0lim 说明iS 都应具有负实部。
在控制工程学科中,要用系统传递函数)()()(11101110s Q s P a s a s a s a b s b s b s b s G n m n n n n m m m m =++⋅⋅⋅++++⋅⋅⋅++=----)(s Q 称为系统的特征方程式。
系统稳定的必要条件是:“系统特征方程式)(s Q 的全部根在左半S 平面内”,即无右极点。
三、系统稳定性的判别方法 1. 李亚普诺夫的直接法 2. 李亚普诺夫的第一近似法 3. 胡维茨法(Hurwitz )4. 劳斯法(Routh )5. 米哈依洛夫6. 乃奎斯特法(Nyquist )7. 波德法(Bode )8. 艾文思法(根轨迹法)第二节 Hurwitz(胡维茨判据)0)(1110=++⋅⋅⋅++=--n n n n n a S a S a S a s Q的所有根的实部均为负值的充要条件是0,0,0;00,02110>∆>∆>∆>>>n n a a a Δ为各阶行列式:4253164207531a a a a a a a a a a a a a a i =∆ 对于2阶系统:,0,0,0210>>>a a a 对于3阶系统:03021>-a a a a .第三节 Routh(劳斯判据) 列劳斯表)(1110=++⋅⋅⋅++=--n n n n n a S a S a S a s Q5251434241343332317531642054321a a a a a a a a a a a a a a a a a(注:1,2行直接写,其余靠计算得到) 其中,1,1,1,11,1,14341333141524241323141515314031423231213141716013351401323120131a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a -=-=-=-=-=-=-=劳斯判据如下:特征方程式)(s Q n全部根的实部全为负值的充要条件,即是系统稳定的充要条件: a. 第一列的各行值 5141311,,,,a a a a a 均不为零,符号全部为正; b. 若上述值符号不同,系统不稳定。
《自动控制原理》第七章 离散控制系统
式中, ( z ) 称为离散信号e* (t ) 的z变换,记为 E( z) Z[e* (t )] E
7.3.2 z变换的方法
常用的求取离散函数的z变换方法有级数求和法、部分分式法和留数计算法。
1.级数求和法
根据z变换的定义,将连续信号 e(t ) 按周期 T 进行采样,级数展开可得
教学难点
离散时间函数的数学表达式及采样定理, 线性常系数差分方程与脉冲传递函数,采 样控制系统的时域分析,采样控制系统的 频域分析。
概述:
近年来,随着脉冲技术、数字式元器件、数字计算机,特别是微处理器
的迅速发展,数字控制器在许多场合取代了模拟控制器,比如微型数字 计算机在控制系统中得到了广泛的应用。离散系统理论的发展是非常迅 速的。 因此,深入研究离散系统理论,掌握分析与综合数字控制系统的基 础理论与基本方法,从控制工程特别是从计算机控制工程角度来看,是 迫切需要的。
图7-3 信号复现过程
7.1.2 数字控制系统
数字控制系统是一种以数字计算机为控制器去控制具有连续工作状态的 被控对象的闭环控制系统。 其原理方框图如图7-4所示。
图7-4 数字控制系统方框图
过程分析:A/D转换器将连续信号转换成数字序列,经数字控制器处理后生 成离散控制信号,再通过D/A转换器转换成连续控制信号作用于 被控对象。
第7章 离散控制系统
教学重点
了解线性离散系统的基本概念和基本定理,把握 线性连续系统与线性离散系统的区别与联系; 熟练掌握Z变换的方法、Z变换的性质和Z反变换; 了解差分方程的定义,掌握差分方程的解法; 了解脉冲传递函数的定义,熟练掌握开环与闭环 系统脉冲传递函数的计算方法; 与线性连续系统相对应,掌握线性离散系统的时 域和频域分析方法和原则。
自动控制原理第7章 离散控制系统

b(t )
H (s)
图7.5 数字控制系统的简化框图
2019/2/19
7
数字控制系统较之一般的连续控制系统具有如下一 些优点: 能够保证足够的计算精度; 在数字控制系统中可以采用高精度检测元件和执 行元件,从而提高整个系统的精度; 数字信号或脉冲信号的抗干扰性能好,可以提高 系统的抗干扰能力; 可以采用分时控制方式,提高设备的利用率,并 且可以采用不同的控制规律进行控制; 可以实现一些模拟控制器难以实现的控制律,特 别对复杂的控制过程,如自适应控制、最优控制、 智能控制等,只有数字计算机才能完成。
2019/2/19
9
7.2.1 采样过程及其数学描述
将连续信号通过采样开关(或采样器)变换成离 散信号的过程称为采样过程。相邻两次采样的时间 间隔称为采样周期T。 采样频率:f s 1/ T 采样角频率: s 2 /T 采样可分为:
等速采样:采样开关以相同的采样周期T动作,又 称为周期采样 多速采样:系统中有n个采样开关分别按不同周期 动作 随机采样:采样开关动作是随机的 本章仅限于讨论等速同步采样过程。
j t xj ( ) xt () e d t
1 X( s ) Xs ( j k s) T k
*
2019/2/19
(7-7)
15
X ( j )
max
2max
(a)
o
max
图7.7 连续信号及离散信号的频谱
式中ω s=2π/T为采样频率,X(s)为x(t)的拉氏变 换。若X*(s)的极点全都位于s左平面,可令s=jω , 求得x*(t)的傅氏变换为
离散控制系统最常见形式是数字控制系统。图 7.4是数字控制系统的结构图。图中用于控制的计算 机D工作在离散状态,被控对象G(s)工作在模拟状态。
水污染控制工程第七章
Se S010 K1t
(7-4)
式中:t—污水与滤料平均接触时间,与滤层深度,水力负荷以及 滤料特性有关。
H Echenfelder提出可用下式计算接触时间 t C n q
(7-5)
式中:C、n是与滤料比表面积及水流特性有关的常数。当为紊流 时,n=2/3;当为层流时,n=1/2。代入式7-4,得
生物滤池的设计计算
供氧量 由温差确定
(7-8)
v = 0.075△T - 0.15 式中:v ─ 空气流速(m/min)
△T ─ 池内外温差,一般为6℃
氧的利用率一般按5~8%考虑。
生物滤池的运转管理与优、缺点
运行管理
挂膜、防止堵塞、减小环境影响
优点
动力省(不需曝气)、操作运转简便
缺点
处理效率低于活性污泥法
工艺特征及优缺点
工艺特征
工艺特征 高负荷率、滤层内部的分层
优缺点 与普通生物滤池和高负荷生物滤池相比,塔式生物滤池具有如下的 优缺点: 1)具有较高的负荷率,因此所需滤池体积较小; 2)塔身高,因而占地面积小; 3)对冲击负荷的适应性好。当受突变负荷冲击时,一般只是上层滤 料的生物膜受到影响,因此可较快地恢复正常工作; 4)塔身高,形成拔风状态,通风效果好;必要时塔顶可加设引风机; 5)由于塔身高,因而废水的提升费用高; 6)运行管理不甚方便。
生物滤池的设计计算
工艺设计
有机负荷法 已知 Fv a 滤料层容积 b 平面尺寸
V A H
Q ( S0 S e ) V FV
H=1~3m
(7-1) (7-2)
c 校核水力负荷
Q q A
(7-3)
q应在适宜范围内,否则改变H,重新求A
控制工程基础(基础部分习题解)例题库相关例题第七章7
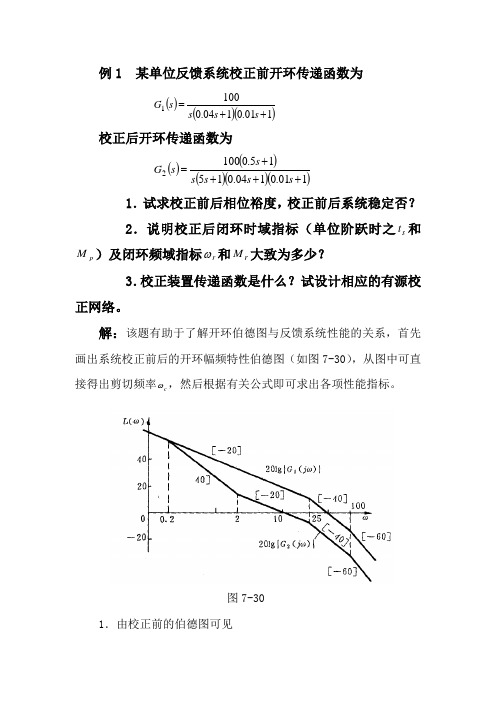
例1 某单位反馈系统校正前开环传递函数为()()()101.0104.01001++=s s s s G校正后开环传递函数为()()()()()101.0104.01515.01002++++=s s s s s s G1.试求校正前后相位裕度,校正前后系统稳定否?2.说明校正后闭环时域指标(单位阶跃时之s t 和p M )及闭环频域指标r ω和r M 大致为多少?3.校正装置传递函数是什么?试设计相应的有源校正网络。
解:该题有助于了解开环伯德图与反馈系统性能的关系,首先画出系统校正前后的开环幅频特性伯德图(如图7-30),从图中可直接得出剪切频率c ω,然后根据有关公式即可求出各项性能指标。
图7-301.由校正前的伯德图可见s rad c /451≈ω则 ()()[] 8.401.045arctan 04.045arctan 901801≈⨯-⨯--+≈γ 故校正前系统是稳定的,但稳定储备很差。
由校正后的伯德图可见s rad c /102≈ω则()()()()[] 3.5201.010arctan 04.010arctan 5.010arctan 510arctan 901801≈⨯-⨯-⨯+⨯--+≈γ 故校正后系统稳定,且稳定裕度有较大提高。
2. s rad /2010025100254343'3=+⨯=+=ωωωωω 则 ()()()()s t M M s rad h h M h c c s r p r r 73.02/105.38101/5.381%2.22%1222.1100%1100/3.6202222.111011*********'322'3=⎪⎭⎫ ⎝⎛-=⎪⎪⎭⎫ ⎝⎛-≈=-=-=≈⨯==≈-+=-+====ωωωωωωωω 3. ()()()1515.012++==s s s G s G s G j相应的有源校正网络可取图7-31所示的电路。
图7-31例2 已知一直流电动机调速系统如图7-32所示,其电机机电时间常数s K K JRT E M m 5.0==,反电势系数,4,/1.0,/1.0Ω=⋅=⋅=R A m N K rad s V K M E ,功率放大器()105.0101+=s s G ,测速反馈系数()s G ms T rad s V K j n ,5.12,/1.02=⋅=为校正放大器传递函数。
第七章工程质量控制的统计分析方法
第七章工程质量控制的统计分析方法(1)[例题]对总体中的全部个体进行编号,然后抽签、摇号确定中选号码,相应的个体即为样品。
这种抽样方法称为( A )。
(2009考题)A 完全随机抽样B 分层抽样C 等距抽样D 整群抽样答案:A[例题]施工过程中,使用控制图分析生产过程是否处于受控状态时,常采用( )的方法收集数据。
(2007考题)A. 单纯随机抽样B. 等距抽样C. 多次抽样D。
整群抽样答案:B。
解析:控制图是用样本数据来分析判断生产过程是否处于稳定状态的有效工具。
它的用途主要有两个:(1)过程分析,即随机连续收集数据,绘制控制图,观察数据点分布情况并判定生产过程状态。
(2)过程控制,为此,要定时抽样取得数据,将其变为点子描在图上,发现并及时消除生产过程中的失调现象,预防不合格品的产生。
控制图常采用等距抽样方法。
[例题]质量检验时,将总体按某一特性分为若干组,从每组中随机抽取样品组成样本的抽样方法称为( B ).(2010考题)A.简单随机抽样B.分层抽样C.等距抽样D.多阶段抽样[例题]根据质量数据的特点,可以将其分为()。
A。
计量值数据B。
计数值数据C。
计件值数据D. 计点值数据E. 计价值数据答案:AB解析:根据质量数据的特点,可以将其分为计量值数据和计数值数据两大类。
计件值数据和计点值数据包含在计数值数据中。
E.计价值数据是干扰项。
[例题]数据中最大值与最小值之差是(),它是用数据变动的幅度来反映其分散状况的特征值。
A.极差B。
标准偏差C.变异系数D.算术平均数答案:A解析:本题考核点是极差概念,应注意识别两类特征值的含义.[例题]描述质量特性数据离散趋势的特征值是( )。
(2009考题)A.算术平均数B.中位数C.极差D.期望值答案:C解析:本题考核点也是与极差相关的概念,描述数据离散(或称分散/离中)趋势的特征值有极差、标准偏差、变异系数等,描述数据集中趋势的特征值有算术平均数、中位数、期望值等,应注意识别两类不同含义的特征值。
控制工程基础第七章

2 v ( 25 / 3 ) 0 列车走上曲线时, a 0.27m/s2 ,an 0 0.23m/s2 R 300 a 2 2 a0 a an 0 0.356m/s 2 , 0 tg 1 49 29 ' 全加速度 an 0 2 v (40/3) 2 1 2 0.593m/s2 列车将要离开曲线时, a 0.27m/s , an1 R 300 a 2 2 2 1 全加速度 a1 a an1 0.652m/s , 1 tg 24 34 ' an1 2
22
三.例题 [例1]列车在R=300m的曲线上匀变速行驶。轨道上曲线部分长 l=200m,当列车开始走上曲线时的速度v0=30km/h,而将要离开
曲线轨道时的速度是v1=48km/h。
求列车走上曲线与将要离开曲线时的加速度?
23
解:由于是匀变速运动,则a 常量。 由公式 v 2 v0 2 2a s 而由已知 s l 200 m,
a
dv d dw (wR) R R, dt dt dt
v 2 (wR ) 2 an Rw 2 R
|a全 ||an a | an 2 a 2 R 2 w 4
a R t g 2 2 an w R w
11
结论: ① v方向与w 相同时为正 , R ,与 R 成正比。
s r 0.3185.4m
w w0 t 3239 rad/s
vB rw 0.392.7m/s
第7章—建设工程进度控制

B
C
D
E
紧前工作 -
-
A A、B B
A
AC
AC
A 2C
D
1 4D 5
B
BE
BE
B 3E
绘图过程//
2024年10月12日星期六
25
例4 工作逻辑关系表
工作名称 A B C D E F G H I J K L M N O P Q
紧前工作
-- A A A C D D
E
B
F
G
H
M
I/L/ N
J
K/O/ P
2024年10月12日星期六
31
TF(总时差)=LS-ES=LF-EF;
FF(自由时差):
(1)有紧后工作的工作,自由时差等于其紧 后工作最早开始时间减去本工作的最早完成时 间之差的最小值;
(2)无紧后工作的工作(即以网络计划终点节 点为完成节点的工作),其自由时差等于计算工 期与本工作最早完成时间之差。//
1 挖槽 75
2 垫层 30
3 基础 90
4 回填 30
13
劳动力
7
10
8
需求曲线
5
2
图7-1 横道图进度计划示意 //
2024年10月12日星期六
8
(1)优点
①形式简便直观,易于编制和理解; ②能直接统计得到资源需要量计划。
(2)缺点
①各工作之间的逻辑关系不清楚; ②不能确定关键工作和关键路径; ③不能反映工作所具有的机动时间; ④对于计划偏差不能简单而迅速地调整。//
1
S 支设模板1 3
2 绑扎钢筋1
2
3 支设模板2
3
4
浇注砼1
第7章 投资控制

链接-监理施工阶段投资控制的工作内容
1.确定投资控制目标,编制资金使用计划 2.审核工程款支付申请(工程计量) 3.纠正投资偏差 4.确定工程变更价款 5.处理索赔事项 6.审查工程中间结算
详见教材图7-5
35
按时间-进度编制的资金需要量曲线
36
按时间进度编制的资金累计需要量曲线
37
7.3.1进行工程计量和付款签证
41
(2)工程预付款的扣回 随着工程进度的推进,预付款一般应以进度 款抵扣的方式予以扣回。扣款的方法有: ※由承发包双方以合同形式约定扣款方式; ※按公式计算:从未施工工程尚需的主要材 料及构件的价值相当于预付款数额时起扣,在随 后的每次中间结算工程价款中,按主要材料及构 件比重抵扣预付款,至竣工前全部扣清。
建设工程监理
化学工业出版社978-7-122-37110-2
第7章 建设工程投资控制
主要内容
7.1建设工程项目投资控制概述 7.2 投资控制原理 7.3 施工阶段投资控制主要任务 7.4监理规范规定
2
7.1 建设工程投资控制概述
3
Hale Waihona Puke 71.1投资控制概念• 投资控制是指要在批准的预算条件下确保项目 保质按期完成。也就是在项目投资形成过程中, 对项目所消耗的人力资源、物质资源和费用开 支,进行指导、监督、调节和限制,及时纠正 将发生和已发生的偏差,把各项费用控制在计 划投资的范围之内,保证投资目标的实现。
39
(3)单价合同的计量
(4)《建设工程工程量清单计价规范》(GB50500—2013)规定: •1)发包人认为需要进行现场计量核实时,应在 计量前24小时通知承包人,承包 人应为计量提供便利条件并派人参加。承包人收到通知后不派人参加计量,视为 认可发包人的计量核实结果。发包人不按照约定时间通知承包人,计量核实结果 无效。 •2)当承包人认为发包人核实后的计量结果有误时,应在收到计量结果通知后的 7 天内向发包人提出书面意见,并附上其认为正确的计量结果和详细的计算资料。 发包人收到书面意见后,应在7天内对承包人的计量结果进行复核后通知承包人。 承包人对复核计量结果仍有异议的,按照合同约定的争议解决办法处理。 •3 ) 承 包 人 完 成 已 标 价 工 程 量 清 单 中 每 个 项 目 的 工 程 量 并 经 发 包 人 核 实 无 误 后 , 发承包人应对每个项目的历次计量报表进行汇总,以核实最终结算工程量,并应 在汇总表上签字确认。
第七章 建设工程施工阶段投资控制第六节 合同价款期中支付综合练习与答案

第七章建设工程施工阶段投资控制第六节合同价款期中支付综合练习与答案一、单选题1、承包人应在签订合同或向发包人提供与预付款等额的预付款保函后向发包人提交预付款支付申请。
发包人应在收到支付申请()天内进行核实后向承包人发出预付款支付证书。
A.14天B.28天C.7天D.21天【参考答案】:C【试题解析】:承包人应在签订合同或向发包人提供与预付款等额的预付款保函后向发包人提交预付款支付申请。
发包人应在收到支付申请的7天内进行核实后向承包人发出预付款支付证书,并在签发支付证书后的7天内向承包人支付预付款。
2、已知计算工程预付款起扣点的公式为,其中N的含义是()。
A.工程预付款额B.承包工程价款总额C.主要材料及构件所占比重D.开始扣回预付款时的累计完成工作量【参考答案】:C【试题解析】:工程预付款起扣点可按下式计算:T=P-M/N。
式中,T为起扣点,即工程预付款开始扣回的累计已完工程价值;N为主要材料及构件所占比重;M为工程预付款总额;P为承包工程合同总额。
3、某包工包料工程合同金额3000万元,则预付款金额最低为()万元。
A.150B.300C.450D.900【参考答案】:B【试题解析】:包工包料工程的预付款的支付比例不得低于签约合同价(扣除暂列金额)的10%,不宜高于签约合同价(扣除暂列金额)的30%。
对重大工程项目,按年度工程计划逐年预付。
实行工程量清单计价的工程,实体性消耗和非实体性消耗部分应在合同中分别约定预付款比例(或金额)。
本题中,预付款金额最低为:3000×10%=300(万元);最高为:3000×30%=900(万元)。
4、某个工程工程是否实行预付款,取决于()。
A.工程性质、施工准备和资金的来源B.工程性质、承包工程量的大小及发包人在招标文件中的规定C.承包工程量的大小D.承包人的资质【参考答案】:B【试题解析】:工程预付款是建设工程施工合同订立后由发包人按照合同约定,在正式开工前预先支付给承包人的工程款。
大气污染控制工程第七章课后习题答案

第七章气态活染物控制技术基础一、填空题1、吸收法净化气态污染物是利用混合气体中各成分在吸收剂中的不同,或与吸收剂中的组分发生,从而将有害组分从气流中分离出来。
【答】溶解度,化学反应2、用水吸收HC1气体属于,用N a OH溶液吸收S02属于,用酸性溶液吸收N H3属于。
【答】物理吸收,化学吸收,化学吸收3、目前工业上常用的吸收设备可分为、和三大类。
【答】表面吸收器,鼓泡式吸收器,喷洒式吸收器4、气体扩散同时发生在气相和液相中,扩散过程既包括,也包括。
【答】分子扩散,湍流扩散5、吸收操作线斜率Ls/G s称为吸收操作的液气比,物理含义为。
【答】处理单位惰性气体所消耗的纯吸收剂的量6、常用的吸收剂有和。
【答】水,碱金属钠、钾、铵或碱土金属钙、镁等的溶液7、防治S02污染的方法主要有清洁生产工艺、采用低硫燃料、、及等。
M g2+, S二酸,氨【答】燃料脱硫,燃料固硫,烟气脱硫8、湿式石灰/石灰石-石膏法存在结垢和堵塞问题,通过在吸收液中加入C a C l2、、、等添加剂可解决此问题。
【答】浆液的p H值,吸收温度,石灰石的粒度9、影响湿式石灰/石灰石-石膏法吸收效率的主要因素有,,,流体力学状态,控制溶液过饱和,吸收剂种类等。
【答】石灰/石灰石法,氧化镁法,钠碱法10、目前应用较多的脱硫方法有、、、氨吸收法、亚硫酸钠法、柠檬酸钠法等。
【答】催化还原法(选择性、非选择性),吸收法,吸附法11、吸附设备主要有、和三种类型。
【答】固定床吸附器,移动床吸附器,流化床吸附器12、影响吸附容量的因素有、、、和。
【答】吸附剂表面积、吸附剂的孔隙大小、孔径分布、分子极性、吸附剂分子上官能团性质13、吸附区高度的计算方法有法和法。
【答】穿透曲线法;希洛夫近似法14、希洛夫方程式为。
【答】x=K L-t015、进入催化燃烧装置的气体首先要除去粉尘、液滴等有害组分,其目的为。
【答】防止中毒16、催化剂的组成为、和。
【答】主活性组分;助催化剂;载体17、催化剂的性能主要指其、和。
第7章线性系统的稳定性分析

(b)外加扰动
(c)系统稳定
(d)系统不稳定
临界稳定:扰动消失后,如果系统的输出与原始 平衡状态之间存在恒定偏差,或输出维持等幅振 荡,则系统处于临界稳定状态。
稳定
临界稳定
不稳定
说明: (1)在经典控制论中,将临界稳定视为不稳定。 原因: ①在进行系统分析时,所依赖的模型通常是简化或 线性化; ②实际系统参数的时变特性; ③系统必须具备一定的稳定裕量。
t o
则系统(渐近)稳定。
b1s m 1 bm 1s bm
(s p ) [s (
i i 1 j k 1
k
n
1
j
j j )][s ( j j j )]
令xi(t)=0,此时在扰动输入n(t)作用下系统的闭 环传递函数为:
X ( s) G2 ( s ) N ( s) o 2 N ( s ) 1 G1 ( s )G2 ( s ) H ( s )
b0 s m b1s m 1 bm 1s bm a0 s n a1s n 1 an 1s an
a0
b0 s m b1s m1 bm1s bm
(s p ) [s (
i i 1 j k 1
k
n
j
j j )][s ( j j j )]
假设系统在初始条件为零时,受到单位脉冲信号 δ(t)的作用,此时系统的输出为单位脉冲响应。这相当 于系统在扰动作用下,输出信号偏离平衡点的问题。 显然,当t→∞时,如果 lim x t 0
在控制工程中,一般取a0为正值。如果a0为负值, 则可在特征方程的两边同乘以-1使a0变成正值。则上述结 论可以归纳为:要使全部特征根s1、s2、…、sn都具有负 实部,则特征方程的各项系数a0、a1、a2、…、an均必须 为正值,即
07清华大学-大气污染控制工程-第七章习题
07清华⼤学-⼤⽓污染控制⼯程-第七章习题第七章⽓态污染物控制技术基础7.1 某混合⽓体中含有2%(体积)CO 2,其余为空⽓。
混合⽓体的温度为30。
C ,总压强为500kPa 。
从⼿册中查得30。
C 时在⽔中的亨利系数E=1.88×10-5kPa ,试求溶解度系数H 及相平衡常数m ,并计算每100g 与该⽓体相平衡的⽔中溶有多少gCO 2。
7.2 20。
C 时O 2溶解于⽔的亨利系数为40100atm ,试计算平衡时⽔中氧的含量。
7.3 ⽤⼄醇胺(MEA )溶液吸收H 2S ⽓体,⽓体压⼒为20atm ,其中含0.1%H 2S (体积)。
吸收剂中含0.25mol/m 3的游离MEA 。
吸收在293K 进⾏。
反应可视为如下的瞬时不可逆反应:+-+→+3222222NHCHCHCH HSNHCHCHCH S H 。
已知:k Al a=108h -1,k Ag a=216mol/m 3.h.atm ,D Al =5.4×10-6m 2/h ,D Bl =3.6×10-6m 2/h 。
试求单位时间的吸收速度。
7.4 在吸收塔内⽤清⽔吸收混合⽓中的SO 2,⽓体流量为5000m 3N /h ,其中SO 2占5%,要求SO 2的回收率为95%,⽓、液逆流接触,在塔的操作条件下,SO 2在两相间的平衡关系近似为Y *=26.7X ,试求:1)若⽤⽔量为最⼩⽤⽔量的1.5倍,⽤⽔量应为多少? 2)在上述条件下,⽤图解法求所需的传质单元数。
7.5 某吸收塔⽤来去除空⽓中的丙酮,吸收剂为清⽔。
⼊⼝⽓体流量为10m 3/min ,丙酮含量为11%(摩尔),要求出⼝⽓体中丙酮的含量不⼤于2%(摩尔)。
在吸收塔操作条件下,丙酮-⽔的平衡曲线(1atm 和299.6K )可表⽰为2)1(95.133.0x xe y -=。
1)试求⽔的⽤量,假设⽤⽔量取为最⼩⽤⽔量1.75倍; 2)假设⽓相传质单元⾼度(以m 计)33.033.003.3-=LG H y 。
《控制工程基础》第7章习题答案

第7章习题答案7-1计算机数字控制系统的基本结构组成图,由数字控制器、检洲装置、执行器,被控对象、A /D 和D/A 等组成。
数字控制器由数字计算机实现,一般包括模数(A/D)转换器、数/模(D/A)转换器和控制算法等,整个系统的操作完全由计算机内的时钟控制,把实测信号转换成数字形式的时刻称为采样时刻,两次相邻采样之间的时间称为采样周期,记作T 。
数字计算机在对系统进行实时控制时,每隔个采样周期T 对系统进行一次采样修正,在每个采样周期中,控制器要完成对于连续信号的采样编码(即A/D 过程)和按控制律进行的数码运算,然后将计算结果由输出寄存器经解码网络将数码转换成连续信号(即D/A 过程)。
因此,A/D 转换器和D/A 转换器是计算机控制系统中的两个特殊环节.7-2信号采样的数学表达式*()()()n e t e nT t nT δ∞==-∑ 拉氏变换为0*0[()]()()()nTs st nTsnTs n L t nT e t e dt e E s e nT e δδ∞---∞-=-===⎰∑设计离散系统时,香农采样定理是必须严格遵守的一条准则,因为它指明了从采 信号中不失真地复现原连续信号理论上所必需的最小采样周期T 。
香农采样定理指出:如果采样器的输人信号()e t 具有有限带宽,并且有直到0ω的领率分量,则使信号()e t 完满地从采祥信号*()e t 中恢复过来的采样周期T ,应满足下列条件, 022T πω≤ 采样定理表达式与02s ωω≥是等价的。
在满足香农采样定理的条件下,要想不失真地复现采样器的输入信号,需要采用理想低通滤波器。
应当指出,香农采样定理只是给出了一个选择采样周期T 或采样频率s f 的指导原则,它给出的是由采样脉冲序列无失真地再现原连续信号所允许的最大采样周期,或最低采样领率。
在控制工程中,一般总是取02s ωω>,而不取02s ωω=的情形。
7-3(1)查表可知,3()E z z -=(2)查表可知,2sin10()2cos101z T E z z z T =-+ (3)34()1t z z E z z z e-=+-- (4)查表可知,2()(1)Tz E z z =- (5)12201()1..........11n n n n n E z a z az a z a z z az z a ∞----=-==+++++==--∑(6)部分分式法求得2222221/1/1/()111()(1)1aTa a a E s s s s a Tz z z E z a z a z a z e -=-++=-+--- (7)查表可知,(1)()(1)()aT aT e z E z z z e ---=-- (8)22211()(1)()1(1)(1)E s s s z Tz z z T E z z z z =++-=+=---将原函数表达式分解为再对各个部分查表,得7-4(1)211lim ()lim(1)()lim(1)0(0.8)(0.1)n z z z e nT z E z z z z →∞→→=-=-=-- (2)211lim ()lim(1)()lim(1)(1)n z z Tz e nT z E z z z →∞→→=-=-=∞- (3)121lim(1)()4lim(1)4(1)(2)z z z X z z z z z →→--=---*0101010(1)()(1)(2)(2)(1)()10*(21)()10(21)()n n n z z z E z z z z z e nT e t t nT δ∞===-----=-=--∑1212212345*033(2)()122135791113......()(23)()n z z z E z z z z z z z z z z e t n t nT δ--------∞=-+-==-+-+=-------=-+-∑(3)查表可知,()0.2t Te t =7-67-725252525252255,2525()()2510110110102532353310()()()3()()T T T TT T T T T T z z Z Z s z e s z ez z a G z z e z e z z Z Z s s s s z e z e z e e b G z z e z e ----------⎡⎤⎡⎤==⎢⎥⎢⎥+-+-⎣⎦⎣⎦=--⎡⎤⎡⎤=-=-⎢⎥⎢⎥++++--⎣⎦⎣⎦-=--,,(1) 由特征方程得到1212z z =-=-,所以系统不稳定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在随动系统和调速系统中,转速、加 速度、电枢电流等,都是常用的反馈变量, 而具体的反馈元件实际上就是一些测量传 感器,如测速发电机、加速度计、电流互 感器等。 从控制的观点来看,反馈校正比串联 校正有其突出的特点,它能有效地改变被 包围环节的动态结构和参数;另外,在一 定条件下,反馈校正甚至能完全取代被包 围环节,从而可以大大减弱这部分环节由 于特性参数变化及各种干扰给系统带来的 不利影响。
滞后-超前校正电网络
滞后-超前校正的频率特性
• 相位滞后和超前发生在不同的频带上。 • 滞后-超前网络的相位超前部分,因增加 了相位超前角,并且在剪切频率点上增 大了相位裕量,从而使频率响应曲线发 生变化。 • 滞后-超前网络的相位滞后部分,在剪切 频率附近和剪切频率以上,将产生衰减, 因此,它允许在低频段上增加增益,以 改善系统的稳态特性。
7.3.1 滞后校正
滞后校正网络:如果输入为正弦信号,其输出也 是正弦信号,但是在相位上滞后输入信号一个角 度。相位滞后角是输入信号频率的函数。 Ts 1 G j ( s) , 1 Ts 1
滞后校正电网络
滞后网络的频率特性
• 滞后校正装置:实质上是一个低通滤波器。 • 滞后校正主要作用:在高频段造成衰减,以便能使系统 获得充分的相位裕量。在滞后校正中,利用的是滞后网 络在高频段的衰减特性,而不是网络的相位滞后特性; 滞后校正虽然带来了负相位,但是处于频率的较低部位, 对系统的稳定裕量不会有大的影响;串联滞后校正没有 改变原来系统最低频段的特性,即对系统的稳态精度不 起破坏作用,还允许适当提高开环增益,提高稳态精度。 • 滞后校正的效果:减小系统带宽(剪切频率移到了低频 点,该点的相位裕量能够满足要求) • 滞后校正的优点:能减小系统的稳态误差(使低频信号 具有较高的增益);防止系统的不稳定现象(降低了较 高临界频率范围内的增益);能抑制高频噪声。 • 滞后校正的缺点:会减缓系统的瞬态响应速度。 • 滞后校正的适用场合:对反馈控制系统要求有大的稳态 误差系数,即高稳态精度,而对快速性要求不高。 • 滞后校正不适用场合:在满足相位裕量的要求后,系统 没有足够的低频响应。
本节要点:
1、掌握时域性能指标和频域性能指标; 2、了解综合性能指标。
7.1.1 时域性能指标
最大超调量 M p 调整时间 t s 峰值时间 t p 上升时间 t r (相对稳定性) (快速性) (快速性) (快速性)
注: 1、上述指标为瞬态(动态)性能指标。 2、 M p 越大,系统的相对稳定性越差。
超前、滞后和滞后-超前校正的比较:
1、超前校正是通过其相位超前效应获得所需结果;而滞 后校正则通过其高频衰减特性获得所需结果。 2、超前校正增大了相位裕量和系统带宽,带宽增加意味 着调整时间减小。具有超前校正的系统,其带宽总是 大于具有滞后校正系统的带宽。如果需要系统具有大 的带宽,或具有快速的响应特性,则应采用超前校正。 但是如果存在噪声信号,则随着带宽增加,高频增益 增加,从而使系统对噪声信号更加敏感,这时应采用 滞后校正。 3、滞后校正可以改善稳态精度,但它使系统的带宽减小, 如果带宽过份减小,则经过校正的系统将呈现缓慢的 响应特性。 4、如果需要足够的稳定裕量、良好的稳态精度、快速的 响应特性,则需采用滞后-超前校正。
(相对稳定性) (相对稳定性) M r —— 相对谐振峰值 M —— 复现频率。 0 ~ M 表示复现低频正弦 输入信号的带宽,称为复现带宽; b ——闭环截止频率, 0 ~ b 的频率范围称为 系统的闭环带宽。 (快速性)
注: 1、相对谐振峰值越大,系统的相对稳定性越差。 2、大的闭环带宽相应于小的上升时间,粗略说, 带宽与响应速度成正比。 3、为了使系统准确地跟踪任意输入信号,需要系 统具有很大的带宽。
7.1.2 开环频域指标
(快速性) c ——开环剪切频率 0 ——相位裕量 (相对稳定性) (相对稳定性) K g ——幅值裕量 (准确性) K p ——静态位置误差系数 (准确性) K v ——静态速度误差系数 K a ——静态加速度误差系数 (准确性)
注: 1、前三个为瞬态指标,后三个为稳态指标。 2、一般地,剪切频率与响应速度成正比。 3、稳定裕量越大,表明系统的相对稳定性越好。 4、误差系数与稳态精度成反比。
0
• 误差平方积分性能指标
I e t践中,只要条件允许,都是尽 可能通过改进被控对象自身的品质特性来改 善控制系统的性能。然而,在控制系统的设 计中,往往被控对象或者无法更改,或者已 经经过了充分的改进而仍然得不到满意的系 统性能。 在这种情况下,为了提高系统的性能, 实现预期性能指标,就有必要对控制系统的 结构进行修改或调整,这就是所谓的校正。
超前校正电网络
超前校正网络的频率特性
超前网络所提供的最大超前角为 1 m arcsin 1 1 对应的角频率为 m T
超前校正网络的极坐标图
• 超前校正装置:基本上是一个高通滤波器。 • 超前校正主要作用:改变频率响应曲线的形状, 产生足够大的相位超前角,以补偿原来系统中 元件造成的过大的相角滞后,提高相位裕量。 • 超前校正的效果:增大系统带宽和高频段增益。 • 超前校正的优点:改善系统的稳定性;提高系 统的响应速度,使系统获得足够的快速性。 • 超前校正的不足:需要附加的放大器增益;很 难使原系统的低频特性得到改善,即对提高系 统的稳态精度作用很小;增大系统带宽,从而 使高频增益增加,系统对高频噪声更加敏感。 • 超前校正的适用场合:要求系统有快速的响应、 超调小。 • 超前校正不适用场合:在剪切频率附近,原系 统的相角急剧下降。
• 系统包含的积分环节个数与开环静态放大倍数 反映在频域中就是系统的开环对数幅频特性曲 线在低频段的斜率和在ω=1处的高度,因此, 开环频率特性曲线低频段决定了闭环系统的稳 态特性(即稳态精度)。为了得到比较高的误 差系数,低频段的增益应当充分大。 • 为了得到满意的相对稳定性(即足够的相位裕 量),在剪切频率附近,开环伯德图上的对数 幅频特性曲线的斜率应等于-20dB/dec.。 • 闭环系统带宽反映了快速性,为了得到足够的 快速性,需要增加系统带宽,但是随着带宽增 大,高频增益增加,使系统对高频噪声敏感。
7.4 反馈控制
反馈校正可理解为现代控制理论中的状 态反馈,在控制系统中得到了广泛的应用, 常见的有被控量的速度反馈、加速度反馈、 电流反馈、以及复杂系统的中间变量反馈等。 本节要点:
1、了解利用反馈校正改变系统局部结构 和参数的原理及特点。 2、了解速度反馈、加速度反馈的原理和 作用。
反馈校正的联结形式
控制系统设计过程流程图
本章将介绍控制系统设计的频率响应法, 基本内容是校正环节的对数频率特性设计法。 本章介绍的内容:
1、系统的时域、频域、综合性能指标; 2、控制系统的串联校正和反馈校正; 3、基于频率法的控制系统的综合与校正; 4、典型机电反馈系统的综合与校正。
7.1 系统的性能指标
性能指标是对系统性能的定量描述, 可用于控制系统的性能(质量)评估。 这些指标与稳(相对稳定性)、准(稳 态精度)、快(响应速度)有关。 控制系统的分析和设计都需要选择 合适的性能指标,根据性能指标设计控 制系统,分析系统性能。
滞后-超前校正网络:如果输入为正弦信号,其 输出也是正弦信号,输出量的相位是输入信号 频率的函数。当输入信号的频率从零增加到无 穷大时,输出量的相角从滞后变到超前。 1s 1 2 s 1 G j ( s) , T1 1 2 T2 T1s 1 T2 s 1
下面讨论的误差准则所对应的性能指标 是系统的希望输出与实际输出之间误差的某 个函数的积分。由于积分值是系统参数的函 数,所以一旦确定了性能指标,就可以通过 调节待估计的参数,使性能指标取极小值来 设计最佳系统。 • 误差积分性能指标 在无超调的情况下,系统的综合性能指 标可取为
I et dt
7.3 串联校正
将校正装置配置在反馈控制系统前 向通道中的校正方式称为串联校正。
本节要点: 掌握超前校正、滞后校正、滞后-超前校 正的形式及相应的校正作用。
7.3.1 超前校正
超前校正网络:如果在网络上加一个正弦输入信 号,其输出也是一正弦信号,但具有相位超前。 相位超前角是输入信号频率的函数。 Ts 1 G j ( s) , 1 Ts 1
控制工程基础
第七章 控制系统的综合与校正
如果一个系统的元件及参数已经给定, 就要分析它能达到什么指标,能否满足所 要求的各项性能指标,这是性能分析问题。 若系统不能满足所要求的性能指标, 可考虑对原系统增加必要的元件或环节, 使系统能够达到所要求的性能指标,这就 是系统的综合与校正。
典型的输出反馈控制系统结构框图
• 校正方式:校正装置按照在系统中的联结方式分 为:串联校正,反馈校正,顺馈校正,干扰补偿 • 串联校正、反馈校正:是在系统主反馈回路内采 用的校正方式。最常用的校正形式。 • 顺馈校正、干扰补偿:作为反馈控制系统的附加 校正而组成复合控制系统。
串联校正和反馈校正的联结方式
• 控制系统设计的频率响应法和根轨迹法:基本 上是由调整增益和设计校正装置组成的。属于 系统设计的试探法。它们在工程上很有用,但 通常仅局限于用来设计单输入单输出线性定常 反馈控制系统。当系统为多输入多输出或时变 系统时,就很难应用这些方法。如果用试探法 设计出系统后,不能满足全部性能指标,则需 要通过调整系统参数或改变系统结构对系统进 行重新设计,直至能够满足给定的性能指标。 通过灵活地运用试探法,可以设计出满足全部 性能指标的系统。在控制系统设计中,如果性 能指标以时域或频域的量值给出时,只能采用 基于频率响应法或根轨迹法的试探法。
基于频率法或根轨迹法的设计由调整增益和设 计校正环节组成。
设计控制系统的目的是用来完成某一特定的 任务。控制系统的设计过程可简单地归纳为: 1、确定性能指标:根据完成任务时系统要达到 的目标,确定控制系统的性能指标。 2、建模:建立被控对象、执行机构、测量环节 等系统的数学模型,是控制系统分析设计的基础。 3、设计控制器:根据性能指标确定控制器的结 构和参数,建立控制器模型。基于频率法或根轨 迹法的设计由调整增益和设计校正环节组成。 4、性能分析:对系统进行性能分析,判断是否 满足规定的性能指标。 5、仿真、调节:对控制系统进行仿真,通过调 节系统参数,获得预期响应,达到规定性能指标。