使用SG追踪PMC信号
光缆故障追踪仪功能快捷操作手册

光缆故障追踪仪功能快捷操作手册1.简述:光缆故障追踪仪具有光缆普查功能,通过简单使用弯曲光缆的方法可以识别光缆,并且弯曲直径可达1m,不同于传统的切割、弯折、冷冻等光缆识别方法,光缆故障点追踪仪的光缆普查功能是全新的不损伤光缆的检测技术,其强大的应用功能可以大大减少光缆抢修维护的时间,降低工程建设和管理的成本,极大提高工作效率。
使用光缆普查功能时,需要两名工程技术人员,分别为:仪表操作者和光缆操作者,仪表操作者利用仪表做测试,光缆操作者弯曲光缆,二者相互配合,通过仪表的蜂鸣器声音指示和迹线图显示来识别光缆。
2.光缆普查光缆操作者确认井盖下面究竟哪条光缆是仪器组正在寻找故障的对应光缆,需要用到普查功能。
2.1.光缆普查——仪表操作者(1)、将设备通过光纤跳线连接到测试光缆上,并固定跳线,避免由跳线引入干扰信号。
(2)、长按设备电源开关3s,进入开机界面,点击“光缆普查”进入光缆普查界面,如下图1:(3)、点击“线路设置”,如下图2:(4)、选择适当的距离范围与脉冲宽度,点击获取,得出测试线路情况;确定好末端标杆(可以通过设备自动默认和手动放置标杆),设置好末端标杆后,点击“确定”,进入普查测试界面,如下图3:(5)、在测试光缆无外界干扰时,普查界面显示为一条水平直线,如下图4。
(6)、当调试仪表结束后,通知现场组的人员,对光缆进行 1.2 操作;当发现目标光缆时。
仪表会出现下图 5 情况,且仪表会发出蜂鸣声。
2.2.光缆普查——光缆操作者普查的现场操作是——取井下一段接近圆弧弯曲的光缆AB,AB 之间光缆长约0.8~1.2m,如图6 所示。
开始普查时,光缆操作者用手(或工具,不想下井的话)握住光缆AB 之间,使光缆在位置1 与位置2 之间来回摆动(中间摆动过程时间约 1 秒),到达位置 1 和位置2 的时候再停顿约1 秒。
位置1 与位置2 面角度为45°~90°即可。
如此反复直到普查确认。
运用FANUCPMC信号追踪功能解决CNC疑难故障
取消 了下支路 的刀库门打开到位条件 ,跟踪运 参 考 文 献 : 行 一个 季 度 , 盖 线未 发生 缸 盖 内孔 烧 结 问题 。 缸 【】 1 王玉琪 . 机床 C C基 础知识 【 . N M】北京 : 京发那 科机 电有 北
收 稿 日期 :0 2 0— ) 男 , 1 8一 , 广西柳州人 , 助理 工程 师 , 研究方 向为数控加工程序 、 电气控制 ; 陶庆才(9 O ) 男 , 18 一 , 广西柳 州人 , 助理工程师 , 研究方 向为电气控制 。 6 9
1 F UC P AN MC 简 介
F N C系统分为 2 AU 个部分 :控制伺服电机和主 轴 电机 动 作 的 系统 部 分 和控 制 辅 助 电气 部 分 的 PC M M 。P C与 P C相似 , L 因为专用于机床 , 以称之 所 为可编程机床控制器 。与传统 的继电器控制电路相 比较 ,MC的优 点有 : P 时 间响应快 , 控制精度 高 , 可靠性好 , 控制程序 可 以随应用场合的不同而改变 ,与计算机的接 口及 维护方便 。并且 由于 P C使用软件来控制 , 以在 M 可 线修改程序 , 具有很高的灵活性 , 具备广泛 的工业通 用性 。 同时 P MC具 有很 强 的 自诊 断功 能 。 C C启 动后 ,MC程 序 即 开始 运行 。在 C C执 N P N 行加工程序过程 中,M P C与加工程序并行运行 ,M PC 扫描机床或机床操作者的输入信号 ,以及强电控制 信号 的执行 结果 。
图 1 P MC信 号 图
信号 : 由机床输人至 P C 如操作面板上输人 M , 的按钮 、 机床开关信号。 y信号 : P C输出至机床 的强电动作信号 , 由 M 如 电磁阀的开 , 关信号。 G信号 :M P C输出至 C C的信号 , N 如急停 C ., 8 4 M或 T功能结束信号 G - 43 。 F 信号 :N C C输出至 P C的信号 , M 如进给轴移动 中信号 F 0 。 12 上述信号在梯形图程序中必须赋予地址 。 G和 F 信号 地 址 由 C C的系 统 软件 定义 好 并 固化 。部分 N 信号地址也由 C C定义好 , N 并提供地址表 。 y信号 由 P MC编程 人员 自行 指定 。 F N CP C具有信号追踪功能 , 以追踪指定 A U M 可 追踪 的结果作为信号 的时间表显示 , 同时动 为执行机床动作如 主轴启停 、 冷却液开关 、 工作 的信号 , 态显示信号采样波形 , 追踪 点最 多 3 2点 , 采样分辨 台 回转 、 换刀等动作 , 在加工程序 中需要编制如下控 率 可精 确 到 8m 。可 以选 择 时 间模 式 或 信 号变 化 模 s 制指令 : 辅助功能)T换刀)B 第二辅助功能 ) M( ,( ,( 。 并 对 P C将信号根据其作用部位及方 向分为 4种 , 式 , 支 持采 样 图形 屏 幕 硬拷 贝 , 于 辅 助诊 断疑 难 M 如图 l 所示 。 故 障十分 方便 。
3-CMMI-项目计划PP监控PMC和集成项目管理IPM

CMMI L3 培训系列v1.0项目计划PP项目监控PMC集成项目管理IPM2008年05月董翼枫(dongyifeng78@ )TOPIC项目计划-PP(Project Planning)Managing the Project Involves ✓估算项目范围和工作内容✓为开发产品而建立相应的组织机制✓开发项目计划✓获得对计划内容的一致的承诺✓从供应商获得识别的产品✓按照计划跟踪项目过程✓识别并分析风险✓跟踪并解决和计划不一致的内容✓跟踪并减缓风险项目计划目的:制定和维护用来定义项目活动的计划。
计划数据SG1 建立估算SG3 获取对计划的承诺SG2制定项目计划项目计划PMCRelevant StakeholdersSG1 建立项目估算测定工数和成本的估算值Planning Data建立估算估算项目范围估算工作产品和任务属性定义项目生命周期✓SG 1 Establish Estimates✓建立估算SP 1.1 Estimate the Scope of the Project估算项目范围SP 1.2 Establish Estimates of Work Product and Task Attributes估算工作产品和任务属性SP 1.3 Define Project Life Cycle定义项目生命周期SP 1.4 Determine Estimates of Effort and Cost测定工数和成本的估算值SG2 制定项目计划建立预算和进度Planning Data拟定一个项目计划策划数据的管理策划相关利害关联者策划项目资源Project Plan建立项目计划识别项目风险策划所需要的知识和技能PMC✓SG 2 Develop a Project Plan✓拟定一个项目计划SP 2.1 Establish the Budget andSchedule 建立预算和进度 SP 2.2 Identify Project Risks 识别项目风险SP 2.3 Plan for Data Management 策划数据的管理SP 2.4 Plan for Project Resources 策划项目资源SP 2.5 Plan for Needed Knowledgeand Skills 策划所需要的知识和技能 SP 2.6 Plan StakeholderInvolvement 策划相关利害关联者 SP 2.7 Establish the Project Plan 建立项目计划制定项目计划组织标准软件过程剪裁指南和标准生命周期描述软件过程文档库软件过程数据库软件需求项目过程SG 3 获得对计划的一致承诺获得对计划的一致承诺评审工作和资源,并调整过于不足之处Project Plans评审对项目有影响的计划得到对计划的承认Relevant Stakeholders✓SG 3 Obtain Commitment to the Plan✓获得对计划的一致承诺SP 3.1 Review Plans that Affect the Project评审对项目有影响的计划SP 3.2 Reconcile Work and Resource Levels评审工作和资源,并调整过于不足之处SP 3.3 Obtain Plan Commitment得到对计划的承认计划的度量内容统计制定《项目策划计划》所花费的工作量统计“估计项目范围”所花费的工作量统计“估计项目属性”所花费的工作量统计“确定项目生存周期”所花费的工作量统计“估计项目工作量和成本”所花费的工作量统计“编制项目预算和进度”所花费的工作量统计“识别项目风险”所花费的工作量统计“策划项目资料管理”所花费的工作量统计“策划项目资源”所花费的工作量统计“策划项目所必需的知识和技能”所花费的工作量 统计“策划项目有关责任者介入计划”所花费的工作量 统计“制定项目计划”所花费的工作量统计“审查从属计划”所花费的工作量统计“使工作和资源协调”所花费的工作量统计“获得计划承认”所花费的工作量TOPIC项目监控-PMC(Project Monitoring and Control)PMC目标✓了解项目的过程,以便在项目性能明显偏离计划时,采取适当的纠正措施。
发那科系统维修与维护
系统接地原则:三地合一。
干扰与抗干扰
抗干扰措施 ①接地 控制器的接地:控制器内部已将信号地与机壳地连接好,只需将控制器上
机壳地端连接机床地即可。
干扰与抗干扰
抗干扰措施 ①接地 驱动器的接地
信号地
电源单元的信号接地与机壳接 地之间的走线与接地点应尽量 分开,避免相互干扰。
挡块位置的调整
错误例:太靠栅格
减速开关
“1”
栅格
“0” // //
误差
“1”
原点位置与定向位置的调整
原点位置的调整 挡块位置的调整
正确例:栅格的中间
减速开关
“1”
“0” //
“1”
栅格
//
① 执行参考点返回,结束后检查诊断302的数值。 ② 通过前后移动挡块调整位置,保证再次回零后,诊断302的数值
干扰与抗干扰
抗干扰措施 ②电源输入端加装浪涌吸收器和噪音滤波器、隔离变压器等
干扰与抗干扰
抗干扰措施 ③交流感性负载(接触器线圈)加装灭弧器
直流感性负载(继电器线圈)加装二极管
④信号线、反馈线、手轮等与动力线分开走线。 ⑤信号线、反馈线、手轮线以及动力线采用屏蔽电缆,同时屏蔽侧需进行
接地处理,屏蔽处理时可以使用发那科提供的接地卡子进行接地处理
注:SRAM全清方法,按“reset”+“del”或“-”+“。”键开机, 按提示进行。
IPL画面1
出现系统报警时,直接按【RESET】键也可进入
IPL画面2
FSSB通讯报警1 报警提示
【故障说明】 FSSB断线报警(SYS114~130) 【故障原因】 放大器、光缆、轴卡、电源故 障。 【处理】 观察报警画面的提示进行分析。
发那科FANUC PMC信号地址表
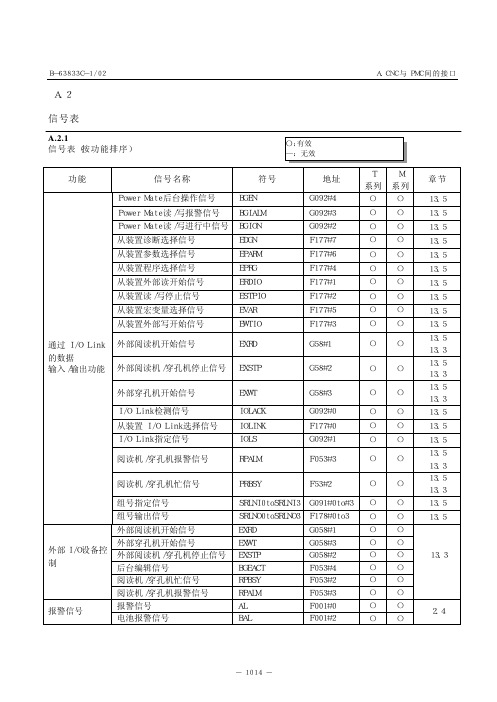
A.2 信号表 A.2.1信号表(按功能排序) 功能 信号名称 符号 地址 T 系列 M 系列 章节 Power Mate后台操作信号 BGEN G092#4 〇 〇 13.5 Power Mate读/写报警信号 BGIALM G092#3 〇 〇 13.5 Power Mate读/写进行中信号 BGION G092#2 〇 〇 13.5 从装置诊断选择信号 EDGN F177#7 〇 〇 13.5 从装置参数选择信号 EPARM F177#6 〇 〇 13.5 从装置程序选择信号 EPRG F177#4 〇 〇 13.5 从装置外部读开始信号 ERDIO F177#1 〇 〇 13.5 从装置读/写停止信号 ESTPIO F177#2 〇 〇 13.5 从装置宏变量选择信号 EVAR F177#5 〇 〇 13.5 从装置外部写开始信号 EWTIO F177#3 〇 〇 13.5 外部阅读机开始信号 EXRD G58#1 〇 〇 13.5 13.3 外部阅读机/穿孔机停止信号 EXSTP G58#2 〇 〇 13.5 13.3 外部穿孔机开始信号 EXWT G58#3 〇 〇 13.5 13.3 I/O Link检测信号 IOLACK G092#0 〇 〇 13.5 从装置I/O Link选择信号 IOLINK F177#0 〇 〇 13.5 I/O Link指定信号 IOLS G092#1 〇 〇 13.5 阅读机/穿孔机报警信号 RPALM F053#3 〇 〇 13.5 13.3 阅读机/穿孔机忙信号 PRBSY F53#2 〇 〇 13.5 13.3 组号指定信号 SRLNI0toSRLNI3 G091#0to#3 〇 〇 13.5 通过I/O Link 的数据 输入/输出功能 组号输出信号 SRLNO0toSRLNO3 F178#0to3 〇 〇 13.5 外部阅读机开始信号 EXRD G058#1 〇 〇 外部穿孔机开始信号 EXWT G058#3 〇 〇 外部阅读机/穿孔机停止信号 EXSTP G058#2 〇 〇 后台编辑信号 BGEACT F053#4 〇 〇 阅读机/穿孔机忙信号 RPBSY F053#2 〇 〇 外部I/O设备控制 阅读机/穿孔机报警信号 RPALM F053#3 〇 〇 13.3 报警信号 AL F001#0 〇 〇 报警信号 电池报警信号 BAL F001#2 〇 〇 2.4 功能 信号名称 符号 地址 T 系列 M 系列 章节 异常负载检测忽略信号 IUDD1toIUDD4 G125 〇 〇 伺服轴异常负载检测信号 ABTQSV F090#0 〇 〇 第1主轴异常负载检测信号 ABTSP1 F090#1 〇 〇 异常负载检测 第2主轴异常负载检测信号 ABTSP2 F090#2 〇 〇 2.9 位置显示忽略 位置显示忽略信号 NPOS1~MPOS4 G198 〇 〇 12.1.10 第2M功能代码信号 M200~M215 F014~F015 〇 〇 第3M功能代码信号 M300~M315 F016~F017 〇 〇 第2M功能选通信号 MF2 F008#4 〇 〇 一个程序段内的多个M指令 第3M功能选通信号 MF3 F008#5 〇 〇 8.3 英/公制转换 英制输入信号 INCH F002#0 〇 〇 11.4 B轴夹紧信号 BCLP F061#1 – 〇 B轴夹紧完成信号 *BECLP G038#6 – 〇 B轴松开信号 BUCLP F061#0 – 〇 分度转台分度 功能(M系列) B轴松开完成信号 *BEUCP G038#6 – 〇 11.9 到位检测 到位检测信号 INP1~INP4 F104 〇 〇 7.2.4.1 AI先行控制 AI先行控制方式信号 AICC F062#0 – 〇 7.1.12 F1位数进给 (M系列) F1位进给选择信号 F1D G016#7 – 〇 7.1.5 误差检测 (T系列) 误差检测信号 SMZ G053#6 〇 – 7.2.4.3 *-L1~*+L4 G114 〇 〇 超程信号 超程信号 *-L1~*-L4 G116 〇 〇 2.3.1 倍率取消 倍率取消信号 OVC G006#4 〇 〇 7.1.6.3 进给速度倍率 进给速度倍率信号 *FV0~*FV7 G012 〇 〇 7.1.6.2 选择跳过程序段信号 BDT1,BDT2~BDT9 G044#0,G045 〇 〇 跳过任选程序段/跳过附加任选程序段 选择跳过程序段检测信号 MBDT1,MBDT2~MBDT9 G004#0,F005 〇 〇 5.5 外部键盘输入方式选择信号 ENBKY G066#1 〇 〇 键代码信号 EKC0~EKC7 G098 〇 〇 键代码读信号 EKSET G066#7 〇 〇 键代码读取完成信号 EKENB F053#7 〇 〇 键输入无效信号 INHKY F053#0 〇 〇 外部键输入 编程屏幕显示方式信号 PRGDPL F053#1 〇 〇 15.5 *+ED1~*+ED4 G118 〇 〇 外部减速 外部减速信号 *-ED1~*-ED4 G120 〇 〇 7.1.8 功能 信号名称 符号 地址 T 系列 M 系列 章节 外部数据输入的数据信号 ED0~ED15 G000,G001 〇 〇 外部数据输入的地址信号 EA0~EA6 G002#0~#6 〇 〇 外部数据输入的读信号 ESTB G002#7 〇 〇 外部数据输入的读取完成信号 EREND F060#0 〇 〇 外部数据输入的检索完成信号 ESEND F060#1 〇 〇 外部数据输入 外部数据输入的检索取消信号 ESCAN F060#2 〇 〇 15.2 外部运动功能(M系列) 外部操作信号 EF F008#0 — 〇 11.7 外部程序输入 外部程序输入启动信号 MINP G058#0 〇 〇 13.4 外部工件号检索 工件号检索信号 PN1,PN2,PN4,PN8,PN16 G009#0~4 〇 〇 15.3 扩展工件号检索信号 EPN0~EPN13 G024#0~#7 G025#0~#5 〇 〇 扩展型外部工件号检索 扩展工件号检索开始信号 EPNS G025#7 〇 〇 15.3.2 用户宏程序输入信号 UI000~UI015 G054,G055 〇 〇 UO000~UO015 F054,F055 〇 〇 用户宏程序 用户宏程序输出信号 UO100~UO131 F056~F059 〇 〇 11.5.1 所需零件计数达到信号 PRTSF F062#7 〇 〇 运行时间和零件的计数显示 多种用途的积分器启动信号 TMRON G053#0 〇 〇 12.1.11 清屏/自动清屏 自动清屏无效信号 *CRTOF G062#1 〇 〇 12.1.18 简单同步轴选择信号 SYNC1~SYNC4 G138 〇 〇 简单同步控制 简单同步手动进给轴选择信号 SYNCJ1 ̄SYNCJ4 G140 — 〇 1.6 斜轴控制 对于垂直轴角度控制轴无效 NOZAGC G063#5 〇 〇 1.7 换刀信号 TLCH FO64#0 〇 〇 换刀复位信号 TLRST G048#7 〇 〇 独立换刀信号 TLCHI F064#2 - 〇 10.3 刀具寿命到期通知信号 TLCHB F064#3 - 〇 10.3.2 独立换刀复位信号 TLRSTI G048#6 - 〇 刀具跳过信号 TLSKP G048#5 〇 〇 新刀具选择信号 TLNW F064#1 〇 〇 TL01~TL256 G047#0to G48#0 - 〇 刀具寿命管理 刀具组号选择信号 TL01~TL64 G047#0~#6 〇 - 10.3 刀具寿命计数倍率信号 TLV0~*TLV9 G049#0~ G050#1 - 〇 功能 信号名称 符号 地址 T 系列 M 系列 章节 XAE X004#0 〇 〇 YAE X004#1 - 〇 ZAE X004#2 - 〇 自动刀具长度测量(M系列)/自动刀具偏置(T系列) 测量位置到达信号 ZAE X004#1 〇 - 14.2 刀具偏移量写入方式选择信号 GOQSM G039#7 〇 - +MIT1,+MIT2 X004#2,#4 〇 - 刀具偏移量写入信号 -MIT1,-MIT2 X004#3,#5 〇 - 刀具偏移号选择信号 OFN0~OFN5 G039#0~#5 〇 - 工件坐标系偏移量写入方式选择信号 WOQSM G039#6 〇 - 刀具偏置值测量B的输入(T系列) 工件坐标系偏移量写入信号 WOSET G040#7 〇 - 14.4.2 刀具偏置值测量A的输入(T系列) 位置记录信号 PRC G040#6 〇 - 14.4.1 辅助功能结束信号 MFIN G005#0 〇 - 主轴功能结束信号 SFIN G005#2 〇 〇 刀具功能结束信号 TFIN G005#3 〇 〇 BFIN G005#4 〇 - 第2辅助功能结束信号 BFIN G005#7 - 〇 第2M功能结束信号 MFIN2 G004#4 〇 〇 第3M功能结束信号 MFIN3 G004#5 〇 〇 高速接口的外部操作信号 EFD F007#1 - 〇 高速M/S/T/B接口 外部操作功能结束信号 EFIN G005#1 - 〇 8.4 高速跳转信号 高速跳转状态信号 HDO0 F122#0 〇 〇 14.3.2 固定循环(M系列)/孔加工固定循环(T系列) 攻丝信号 TAP F001#5 〇 〇 11.6 伺服关闭 (机械手轮) 伺服关断信号 SVF1~SVF4 G126 〇 〇 1.2.7 电机速度检测功能使能信号 MSDFON D016#0 〇 〇 伺服电机速度检测信号 DSV1toDSV4 Y(n+0) 〇 〇 伺服/主轴电动机速度检测 主轴电机速度检测信号 DSP1,DSP2 Y(n+1)#0,#1 〇 〇 2.10 循环启动/进给循环启动 ST G007#2 〇 〇 5.1 进给暂停信号 *SP G008#5 〇 〇 自动运行信号 OP F000#7 〇 〇 循环启动灯信号 STL F000#5 〇 〇 暂停 进给暂停灯信号 SPL F000#4 〇 〇 功能 信号名称 符号 地址 T 系列 M 系列 章节 Cs轮廓控制转换信号 CON G027#7 〇 〇 Cs轮廓控制 Cs轮廓控制转换结束信号 FSCSL F044#1 〇 〇 9.8 轴移动信号 MV1~MV4 F102 〇 〇 轴运动状态的输出 轴移动方向信号 MVD1~MVD4 F106 〇 〇 1.2.4 实际主轴速度输出 实际主轴速度信号 AR0~AR15 F040,F041 〇 – 9.6 恒表面切削线速度控制 恒表面切削速度信号 CSS F002#2 〇 〇 9.4 主轴停止完成信号 SPSTP G028#6 〇 – 主轴松开信号 SUCLP F038#1 〇 – 主轴松开完成信号 *SUCPF G028#4 〇 – 主轴夹紧信号 SCLP F038#0 〇 – 多主轴控制 (T系列) 主轴夹紧完成信号 *SCPF G028#5 〇 – 9.9 SHA00~SHA11 G078#0~G079#3 〇 〇 主轴定向 主轴定向外部停止位置指令信号 SHB00~SHB11 G080#0~G081#3 〇 〇 9.12 TLMLA G070#0 〇 〇 转矩限制指令LOW信号(串行主轴) TLMLB G074#0 〇 〇 TLMHA G070#1 〇 〇 转矩限制指令HIGH信号(串行主轴) TLMHB G074#1 〇 〇 CTH1A,CTH2A G070#3,#2 〇 〇 离合器/齿轮信号(串行主轴) CTH1B,CTH2B G074#3,#2 〇 〇 SRVA G070#4 〇 〇 CCW指令信号(串行主轴) SRVB G074#4 〇 〇 SFRA G070#5 〇 〇 CW指令信号(串行主轴) SFRB G074#5 〇 〇 ORCMA G070#6 〇 〇 定向指令信号(串行主轴) ORCMB G074#6 〇 〇 MRDYA G070#7 〇 〇 机床就绪信号(串行主轴) MRDYB G074#7 〇 〇 ARSTA G071#0 〇 〇 主轴串行输出/主轴模拟输出 报警复位信号(串行主轴) ARSTB G075#0 〇 〇 9.2 *ESPA G071#1 〇 〇 急停信号(串行主轴) *ESPB G075#1 〇 〇 SPSLA G071#2 〇 〇 主轴选择信号(串行主轴) SPALB G075#2 〇 〇 MCFNA G071#3 〇 〇 动力线切换结束信号(串行主轴) MCFFNB G075#3 〇 〇 功能 信号名称 符号 地址 T 系列 M 系列 章节 SOCNA G071#4 〇 〇 软启动/停止取消信号(串行主轴) SOCNB G075#4 〇 〇 INTGA G071#5 〇 〇 速度积分信号(串行主轴) INTGB G075#5 〇 〇 RSLA G071#6 〇 〇 输出切换请求信号(串行主轴) RSLB G075#6 〇 〇 RCHA G071#7 〇 〇 动力线状态检测信号(串行主轴) RCHB G075#7 〇 〇 INDXA G072#0 〇 〇 准停位置改变指令信号(串行主轴) INDXB G076#0 〇 〇 ROTAA G072#1 〇 〇 准停位置改变时的旋转方向指令信号(串行主轴) ROTAB G076#1 〇 〇 NRROA G072#2 〇 〇 准停位置改变时的最短距离指令信号(串行主轴) NRROB G076#2 〇 〇 DEFMDA G072#3 〇 〇 速度微分方式指令信号(串行主轴) DEFMDB G076#3 〇 〇 OVRIDA G072#4 〇 〇 模拟倍率信号(串行主轴) OVTIDB G076#4 〇 〇 INCMDA G072#5 〇 〇 增量指令外部设定定向信号(串行主轴) INCMDB G076#5 〇 〇 MFNHGA G072#6 〇 〇 主轴切换主 MCC接点状态信号(串行主轴) MFNHGB G076#6 〇 〇 RCHHGA G072#7 〇 〇 主轴切换HIGH MCC接点状态信号(串行信号) RCHHGB G076#7 〇 〇 MORCMA G073#0 〇 〇 磁传感器定向指令信号(串行主轴) MORCMB G077#0 〇 〇 SLVA G073#1 〇 〇 从动运行方式指令信号(串行主轴) SLVB G077#1 〇 〇 MPOFA G073#2 〇 〇 电机动力切断指令信号(串行主轴) MPOFB G077#2 〇 〇 DSCNA G073#4 〇 〇 断线检测无效信号 DSCNB G077#4 〇 〇 ALMA F045#0 〇 〇 报警信号(串行主轴) ALMB F049#0 〇 〇 SSTA F045#1 〇 〇 速度零信号(串行主轴) SSTB F049#1 〇 〇 SDTA F045#2 〇 〇 主轴串行输出/主轴模拟输出 速度检测信号(串行主轴) SDTB F049#2 〇 〇 9.2 功能 信号名称 符号 地址 T 系列 M 系列 章节 SARA F045#3 〇 〇 速度到达信号(串行主轴) SARB F049#3 〇 〇 LDT1A F045#4 〇 〇 负载检测信号1(串行主轴) LDT1B F049#4 〇 〇 LDT2A F045#5 〇 〇 负载检测信号2(串行主轴) LDT2B F049#5 〇 〇 TLMA F045#6 〇 〇 转矩限制信号(串行主轴) TLMB F049#6 〇 〇 ORARA F045#7 〇 〇 定向结束(串行主轴) ORARB F049#7 〇 〇 CHPA F046#0 〇 〇 动力线切换信号(串行主轴) CHPB F050#0 〇 〇 CFINA F046#1 〇 〇 主轴切换完成信号(串行主轴) CFINB F050#1 〇 〇 RCHPA F046#2 〇 〇 输出切换信号(串行主轴) RCHPB F050#2 〇 〇 RCFNA F046#3 〇 〇 输出切换完成信号(串行主轴) RCFNB F050#3 〇 〇 SLVSA F046#4 〇 〇 从动运行状态信号(串行主轴) SLVSB F050#4 〇 〇 PORA2A F046#5 〇 〇 位置编码器定向接近信号(串行主轴) PORA2B F050#5 〇 〇 MORA1A F046#6 〇 〇 磁传感器定向完成信号(串行主轴) MORA2B F050#6 〇 〇 MORA2A F046#7 〇 〇 磁传感器定向接近信号(串行主轴) MORA2B F050#7 〇 〇 INCSTA F047#1 〇 〇 增量定向方式信号(串行主轴) INCSTB F051#1 〇 〇 EXOFA F047#4 〇 〇 主轴串行输出/主轴模拟输出 电机激磁关断状态信号 EXOFB F051#4 〇 〇 9.2 主轴停信号 *SSTP G029#6 〇 〇 主轴定向信号 SOR G029#5 〇 〇 主轴速度倍率信号 SOV0~SOV7 G030 〇 〇 主轴速度到达信号 SAR G029#4 〇 〇 主轴速度控制 主轴使能信号 ENB F001#4 〇 〇 9.3 功能 信号名称 符号 地址 T 系列 M 系列 章节 齿轮档选择信号(M型换档) GR1О,GR2О,GR3О F034#0~#2 — 〇 齿轮档选择信号(T型换档) GR1,GR2 G028#1,#2 〇 〇 主轴速度控制 S12位代码信号 R01О~R12О F036#0~ F037#3 〇 〇 9.3 主轴速度波动的检测 主轴波动检测报警信号 SPAL F035#0 〇 〇 9.5 主轴同步控制信号 SPSYC G038#2 〇 〇 主轴相位同步控制信号 SPPHS G038#3 〇 〇 主轴同步速度控制结束信号 FSPSY F044#2 〇 〇 主轴相位同步控制结束信号 FSPPH F044#3 〇 〇 主轴同步控制 主轴同步控制报警信号 SYCAL F044#4 〇 〇 9.11 HS1A~HS1D G018#0~#3 〇 〇 HS2A~HS2D G018#4~#7 〇 〇 手轮进给轴选择信号 HS3A~HS3D G019#0~#3 — 〇 手轮进给 手轮进给量选择信号 (增量进给信号) MP1,MP2 G019#4,#5 〇 〇 3.2 HS1IA~HS2ID G041#0~#3 〇 〇 HS2IA~HS2ID G041#4~#7 〇 〇 手轮中断 手轮中断轴选择信号 HS3IA~HS3ID G042#0~#3 — 〇 3.3 手动返回参考点选择信号 ZRN G043#7 〇 〇 手动返回参考点选择检测信号 MREF F004#5 〇 〇 手动返回参考点减速信号 *DEC1~*DEC4 X009 〇 〇 返回参考点结束信号 ZP1~ZP4 F094 〇 〇 手动返回参考位置 参考点建立信号 ZRF1~ZRF4 F120 〇 〇 4.1 +J1~+J4 G100 〇 〇 进给轴和方向选择信号 -J1~-J4 G102 〇 〇 手动进给速度倍率信号 *JV1~*JV15 G010,G011 〇 〇 JOG进给/增量进给 手动快速移动选择信号 RT G019#7 〇 〇 3.1 CNC就绪信号 MA F001#7 〇 〇 CNC就绪信号 伺服就绪信号 SA F000#6 〇 〇 2.2 过载转矩信号 SKIP X004#7 - 〇 小孔步进钻孔循环(M系列) 小深孔钻削进行中信号 PECK2 F066#5 - 〇 11.13 快速进给信号 RPDO F002#1 〇 〇 状态输出信号 切削进给信号 CUT F002#6 〇 〇 2.7 单程序段信号 SBK G046#1 〇 〇 单程序段 单程序段检测信号 MSBK F004#3 〇 〇 5.3.3 功能 信号名称 符号 地址 T 系列 M 系列 章节 SKIP X004#7 〇 〇 跳转功能 跳转信号 SKIPP G006#6 〇 - 14.3.1 启动锁住信号 STLK G007#1 〇 - 互锁信号 *IT G008#0 〇 〇 各轴互锁信号 *IT1 ~*IT4 G130 〇 〇 各轴和各方向手动进给互锁信号 +MIT1,+MIT2 X004#2,#4 〇 - 各轴和各方向手动进给互锁信号 -MIT1,MIT2 X004#3,#5 〇 - +MIT1~+MIT4 G132#0~#3 - 〇 各轴和方向互锁信号 -MIT1~-MIT4 G134#0~#3 - 〇 切削程序段开始互锁信号 *CSL G008#1 〇 〇 启动锁住/互锁 程序段开始互锁信号 *BSL G008#3 〇 〇 2.5 +EXL1to+EXL4 G104 〇 〇 坐标轴方向存储行程限位 开关信号 -EXL1to-EXL4 G105 〇 〇 存储行程极限选择信号 EXLM G007#6 〇 〇 +LM1~+LM4 G110 - 〇 存储行程外部设定信号 -LM1~-LM4 G110 - 〇 行程限位解除信号 RLSOT G007#7 - 〇 +OT1to+OT4 F124 - 〇 存储行程极限检测1 行程限位到达信号 -OT1to-OT4 F126 - 〇 2.3.2 存储行程极限检查2,3 行程限位3解除信号 RLSOT3 G007#4 〇 〇 2.3.3 绝对位置检测器电池零 报警信号 PBATZ F172#6 〇 〇 绝对位置检测 绝对位置检测器电池电压 低报警信号 PBATL F172#7 〇 〇 1.4.2 先行控制 (M系列) 先行控制方式信号 G08MD F066#0 - 〇 7.1.11 软操作面板信号(MD1) MD1O F073#0 〇 〇 软操作面板信号(MD2) MD2O F073#1 〇 〇 软操作面板信号(MD4) MD4O F073#2 〇 〇 软操作面板信号(ZRN) ZRNO F073#4 〇 〇 软操作面板信号(+J1~+J4) +J1O~+J4O F081#0,#2,#4,#6 〇 〇 软操作面板信号(-J1~-J4) -J1O~-J4O F081#1,#3,#5,#7 〇 〇 软操作面板信号(RT) RTO F077#6 〇 〇 软操作面板信号(HS1A) HS1AO F077#0 〇 〇 软操作面板 软操作面板信号(HS1B) HS1BO F077#1 〇 〇 12.1.14 功能 信号名称 符号 地址 T 系列 M 系列 章节 软操作面板信号(HSIC) HS1CO F077#2 〇 〇 软操作面板信号(HS1D) HS1DO F077#3 〇 〇 软操作面板信号(MP1) MP1O F076#0 〇 〇 软操作面板信号(MP2) MP2O F076#1 〇 〇 软操作面板信号(*JV0~*JV15) *JVO0~*JV15O F079,F080 〇 〇 软操作面板信号(*FV0~*FV7) *FV0O~*FV7O F078 〇 〇 软操作面板信号(ROV1) ROV1O F076#4 〇 〇 软操作面板信号(ROV2) ROV2O F076#5 〇 〇 软操作面板信号(BDT) BDTO F075#2 〇 〇 软操作面板信号(SBK) SBKO F075#3 〇 〇 软操作面板信号(MLK) MLKO F075#4 〇 〇 软操作面板信号(DRN) DRNO F075#5 〇 〇 软操作面板信号(KEY1~KEY4) KEYO F075#6 〇 〇 软操作面板信号(*SP) SPO F075#7 〇 〇 软操作面板 软操作面板通用开关信号 OUT0~OUT7 F072 〇 〇 12.1.14 第2参考位置返回结束信号 ZP21~ZP24 F096 〇 〇 第3参考位置返回结束信号 ZP31~ZP34 F098 〇 〇 返回第2参考位置/返回第3,第4参考位置 第4参考位置返回结束信号 ZP41~ZP44 F100 〇 〇 4.5 多级跳转 跳转信号 SKIP2 to SKIP6, SKIP7,SKIP8 X004#2 to#6,#0#1 〇 〇 14.3.3 复合固定循环(M系列)/固定循环(T系列) 倒角信号 CDZ G053#7 〇 —11.8 卡盘/尾架屏蔽(T系列) 尾架屏蔽选择信号 *TSB G060#7 〇 —2.3.4 撞块式参考位置设定 冲撞式参考位置设定的扭矩极限到达信号 CLRCH1~CLRCH8 F180 〇 〇 4.6 DNC运行选择信号 DNCI G043#5 〇 〇 DNC运行 DNC运行选择确认信号 MRMT F003#4 〇 〇 5.9 空运行信号 DRN G046#7 〇 〇 空运行 空运行检测信号 MDRN F002#7 〇 〇 5.3.2 功能 信号名称 符号 地址 T 系列 M 系列 章节 转矩限制跳转(T系列) 转矩极限到达信号 TRQL1~TRQL8 F114 〇 —14.3.4 主轴测量选择信号 S2TLS G040#5 〇 — 主轴1测量信号 S1MES F062#3 〇 — 补偿值输入 主轴2测量信号 S2MES F062#4 〇 — 14.4 螺纹切削 螺纹切削信号 THRD F002#3 〇 〇 6.4.1 快速进给倍率信号 ROV1,ROV2 G014#0,#1 〇 〇 1%快速进给倍率选择信号 HROV G096#7 〇 〇 快速移动倍率 1%快速进给倍率信号 HROV0~HROV6 G096#0~#6 〇 〇 7.1.6.1 用PMC或个人计算机直接运行 直接运行选择信号 DMMC G042#7 〇 〇 15.6 控制轴选择信号(PMC轴控制) EAX1~EAX4 G136 〇 〇 轴控制高级指令信号 EASIP1 to EASIP4 G200 〇 〇 EC0A~EC6A G143#0~#6 〇 〇 EC0B~EC6B G155#0~#6 〇 〇 EC0C~EC6C G167#0~#6 〇 〇 轴控制指令信号(PMC轴控制) EC0D~EC6D G179#0~#6 〇 〇 EIF0A~EIF15A G144,G145 〇 〇 EIF0B~EIF15B G156,G157 〇 〇 EIF0C~EIF15C G168,G169 〇 〇 控制轴进给速度信号 EIF0D~EIF15D G180,G181 〇 〇 EBUFA G142#7 〇 〇 EBUFB G154#7 〇 〇 EBUFC G166#7 〇 〇 轴控制指令读入信号(PMC轴控制) EBUFD G178#7 〇 〇 EID0A~EID31A G146~G149 〇 〇 EID0B~EID31B G158~G161 〇 〇 EID0C~EID31C G170~G173 〇 〇 轴控制数据信号(PMC轴控制) EID0D~EID31D G182~G185 〇 〇 EBSYA F130#7 〇 〇 EBSYB F133#7 〇 〇 EBSYC F136#7 〇 〇 PMC轴控制 控制轴指令读入完成信号(PMC轴控制) EBSYD F139#7 〇 〇 15.1 ECLRA G142#6 〇 〇 ECLRB G154#6 〇 〇 ECLRC G166#6 〇 〇 复位信号(PMC轴控制) ECLRD G178#6 〇 〇 功能 信号名称 符号 地址 T 系列 M 系列 章节 ESTPA G142#5 〇 〇 ESTPB G154#5 〇 〇 ESTPC G166#5 〇 〇 轴控制暂停信号(PMC轴控制) ESTPD G178#5 〇 〇 ESBKA G142#3 〇 〇 ESBKB G154#3 〇 〇 ESBKC G166#3 〇 〇 程序段停止信号(PMC轴控制) ESBKD G178#3 〇 〇 EMSBKA G143#7 〇 〇 EMSBKB G155#7 〇 〇 EMSBKC G167#7 〇 〇 程序段停无效信号(PMC轴控制) EMSBKD G179#7 〇 〇 EM11A~EM48A F132,F142 〇 〇 EM11B~EM48B F135,F145 〇 〇 EM11C~EM48C F138,F148 〇 〇 辅助功能代码信号(PMC轴控制) EM11D~EM48D F141,F151 〇 〇 EMFA F131#0 〇 〇 EMFB F134#0 〇 〇 EMFC F137#0 〇 〇 辅助功能选通信号(PMC轴控制) EMFD F140#0 〇 〇 EFINA G142#0 〇 〇 EFINB G154#0 〇 〇 EFINC G166#0 〇 〇 辅助功能结束信号(PMC轴控制) EFIND G178#0 〇 〇 ESOFA G142#4 〇 〇 ESOFB G154#4 〇 〇 ESOFC G166#4 〇 〇 伺服关闭信号(PMC轴控制) ESOFD G178#4 〇 〇 EMBUFA G142#2 〇 〇 EMBUFB G154#2 〇 〇 EMBUFC G166#2 〇 〇 缓冲禁止信号(PMC轴控制) EMBUFD G178#2 〇 〇 ELCKZA G142#1 〇 〇 ELCKZB G154#1 〇 〇 ELCKZC G166#1 〇 〇 PMC轴控制/PMC轴速度控制功能 累积的零位检测信号 ELCKZD G178#1 〇 〇 15.1 控制轴选择状态信号(PMC轴控制) *EAXSL F129#7 〇 〇 功能 信号名称 符号 地址 T 系列 M 系列 章节 EINPA F130#0 〇 〇 EINPB F133#0 〇 〇 EINPC F136#0 〇 〇 到位信号(PMC轴控制) EINPD F139#0 〇 〇 ECKZA F130#1 〇 〇 ECKZB F133#1 〇 〇 ECKZC F136#1 〇 〇 零跟随误差检测信号(PMC轴控制) ECKZD F139#1 〇 〇 EIALA F130#2 〇 〇 EIALB F133#2 〇 〇 EIALC F136#2 〇 〇 报警信号(PMC轴控制) EIALD F139#2 〇 〇 EGENA F130#4 〇 〇 EGENB F133#4 〇 〇 EGENC F136#4 〇 〇 轴移动信号(PMC轴控制) EGEND F139#4 〇 〇 EDENA F130#3 〇 〇 EDENB F133#3 〇 〇 EDENC F136#3 〇 〇 辅助功能执行信号(PMC轴控制) EDEND F139#3 〇 〇 EOTNA F130#6 〇 〇 EOTNB F133#6 〇 〇 EOTNC F136#6 〇 〇 负向超程信号(PMC轴控制) EOTND F139#6 〇 〇 EOTPA F130#5 〇 〇 EOTPB F133#5 〇 〇 EOTPC F136#5 〇 〇 正向超程信号(PMC轴控制) EOTPD F139#5 〇 〇 进给速度倍率信号(PMC轴控制) *FV0E~*FV7E G151 〇 〇 倍率取消信号(PMC轴控制) OVCE G150#5 〇 〇 快速进给倍率信号(PMC轴控制) ROV1E,ROV2E G150#0,#1 〇 〇 空运行信号(PMC轴控制) DRNE G150#7 〇 〇 手动快速进给选择信号(PMC轴控制) RTE G150#6 〇 〇 倍率0%信号(PMC轴控制) EOV0 F129#5 〇 〇 PMC轴控制 跳转信号(PMC轴控制) ESKIP X004#6 〇 〇 15.1 功能 信号名称 符号 地址 T 系列 M 系列 章节 分配结束信号(PMC轴控制) EADEN1~EADEN4 F112 〇 〇 EABUFA F131#1 〇 〇 EABUFB F134#1 〇 〇 EABUFC F137#1 〇 〇 缓冲器满信号(PMC轴控制) EABUFD F140#1 〇 〇 PMC轴控制 控制信号(PMC轴控制) EACNT1~EACNT4 F182 〇 〇 15.1 SIND G033#7 〇 〇 SIND2 G035#7 〇 〇 PMC控制主轴速度输出控制信号 SIND3 G037#7 〇 〇 R01I~R12I G032#0~G033#3 〇 〇 R01I2~R12I2 G034#0~G035#3 〇 〇 主轴电机速度指令信号 R01I3~R12I3 G036#0~G037#3 〇 〇 SSIN G033#6 〇 〇 SSIN2 G035#6 〇 〇 主轴电机指令输出极性选择信号 SSIN3 G037#6 〇 〇 SGN G033#5 〇 〇 SGN2 G035#5 〇 〇 PMC的主轴输出控制 主轴电机指令极性选择信号 SGN3 G037#5 〇 〇 15.4 手摇脉冲发生器选择信号 IOLBH2 G199#0 〇 〇 I/O Link 口β系列伺服电动机手摇轮接口(外部设备控制) 手摇脉冲发生器选择信号 IOLBH3 G199#1 〇 〇 16.1 *ESP G008#4 〇 〇 急停 急停信号 *ESP X008#4 〇 〇 2.1 所有轴VRDY OFF报警忽略信号 IGNVRY G066#0 〇 〇 VRDY OFF报警忽略信号 各轴VRDY OFF报警忽略信号 IGVRY1~IGVRY4 G192 〇 〇 2.8 跟踪 跟踪信号 *FLWU G007#5 〇 〇 1.2.6 程序再启动信号 SRN G006#0 〇 〇 程序再启动 程序再启动中信号 SRNMV F002#4 〇 〇 5.7 位置开关 位置开关信号 PSW01~PSW16 F070#0~ F071#7 〇 〇 1.2.8 辅助功能代码信号 M00~M31 F010~F013 〇 〇 辅助功能/第2辅助功能 辅助功能选通信号 MF F007#0 〇 〇 8.1 功能 信号名称 符号 地址 T 系列 M 系列 章节 DM00 F009#7 〇 〇 DM01 F009#6 〇 〇 DM02 F009#5 〇 〇 M译码信号 DM30 F009#4 〇 〇 主轴功能代码信号 S00~S31 F022~F025 〇 〇 主轴功能选通信号 SF F007#2 〇 〇 刀具功能代码信号 T00~T31 F026~F029 〇 〇 刀具功能选通信号 TF F007#3 〇 〇 第2辅助功能代码信号 B00~B31 F030~F033 〇 〇 BF F007#4 〇 — 第2辅助功能选通信号 BF F007#7 — 〇 结束信号 FIN G004#3 〇 〇 辅助功能/第2辅助功能 分配结束信号 DEN F001#3 〇 〇 8.1 辅助功能锁住信号 AFL G005#6 〇 〇 辅助功能锁住 辅助功能锁住检查信号 MAFL F004#4 〇 〇 8.2 多边形车削 多变形同步中信号 PSYN F063#7 〇 — 6.9.1 所有轴机床锁住信号 MLK G044#1 〇 〇 各轴机床锁住信号 MLK1~MLK4 G108 〇 〇 机床锁住 所有轴机床检测信号 MMLK F004#1 〇 〇 5.3.1 手动绝对值信号 *ABSM G006#2 〇 〇 手动绝对值 ON/OFF 手动绝对值检测信号 MABSM F004#2 〇 〇 5.4 SWS1 G027#0 〇 〇 SWS2 G027#1 〇 〇 主轴选择信号 SWS3 G027#2 〇 〇 *SSTP1 G027#3 〇 〇 *SSTP2 G027#4 〇 〇 各主轴停信号 *SSTP3 G027#5 〇 〇 齿轮档选择信号(输入) GR21 G029#0 〇 〇 第2位置编码器选择信号 PC2SLC G028#7 〇 〇 ENB2 F038#2 〇 〇 多主轴控制(T系列) 主轴使能信号 ENB3 F038#3 〇 〇 9.9 镜像信号 MI1~MI4 G106 〇 〇 镜像 镜像检测信号 MMI1~MMI4 F108 〇 〇 1.2.5 存储器保护键 存储器保护信号 KEY1~KEY4 G046#3~#6 〇 〇 12.2.3 方式选择信号 MD1,MD2,MD4 G043#3~#2 〇 〇 方式选择 手动数据输入选择检测信号 MMDI F003#3 〇 〇 2.6 功能 信号名称 符号 地址 T 系列 M 系列 章节 自动运行选择检测信号 MMEM F003#5 〇 〇 存储器编辑选择检测信号 MEDT F003#6 〇 〇 手轮进给选择检测信号 MH F003#1 〇 〇 增量进给选择检测信号 MINC F003#0 〇 〇 JOG进给选择检测信号 MJ F003#2 〇 〇 方式选择 示教选择检测信号 MTCHIN F003#7 〇 〇 2.6 刚性攻丝信号 RGTAP G061#0 〇 〇 RGSPP F065#0 — 〇 主轴的转向信号 RGSPM F065#1 — 〇 刚性攻丝过程中信号 RTAP F076#3 〇 〇 刚性攻丝 刚性攻丝主轴选择信号 RGTSP1,RGTSP2 G061#4,#5 〇 — 刚性攻丝回退启动信号 RTNT G062#6 — 〇 刚性攻丝回退 刚性攻丝回退结束信号 RTPT F066#1 — 〇 9.10 外部复位信号 ERS G008#7 〇 〇 复位和倒回信号 RRW G008#6 〇 〇 复位信号 RST F001#1 〇 〇 复位和倒回 倒回信号 RWD F000#0 〇 〇 5.2 中断型用户宏程序 用户宏程序中断信号 UINT G053#3 〇 〇 11.5.2 A.2.2信号表(按符号排序) 组别 符号 信号名称 地址 T 系列M 系列 章节 *+ED1~*+ED4 外部减速信号 G118 〇 〇 7.1.8 *+L1~*+L4 超程信号 G114 〇 〇 2.3.1 *-ED1~*-ED4 外部减速信号 G120 〇 〇 7.1.8 *-L1~*-L4 超程信号 G116 〇 〇 2.3.1 *ABSM 手动绝对值信号 G006#2 〇 〇 5.4 *BECLP B轴夹紧完成信号 G038#7 — 〇 11.9 *BEUCP B轴松开完成信号 G038#6 — 〇 11.9 *BSL 程序段开始互锁信号 G008#3 〇 〇 2.5 *CRTOF CRT显示自动清屏取消信号 G062#1 〇 〇 12.1.17*CSL 切削程序段开始互锁信号 G008#1 〇 〇 2.5 *DEC1~*DEC4 参考点返回减速信号 X009 〇 〇 4.1 *EAXSL 控制轴选择状态信号(PMC轴控制) F129#7 〇 〇 15.1 *ESP X1008#4 〇 〇 *ESP 急停信号 G008#4 〇 〇 2.1 *ESPA G071#1 〇 〇 *ESPB 急停信号(串行主轴) G075#1 〇 〇 9.2 *FLWU 跟踪信号 G007#5 〇 〇 1.2.6 *FV0~*FV7 进给速度倍率信号 G012 〇 〇 7.1.6.2*FV0E~*FV7E 进给速度倍率信号(PMC轴控制) G151 〇 〇 15.1 *FV0O~*FV7O 软操作面板信号(*FV0~*FV7) F078 〇 〇 12.1.14*HROV0~*HROV6 1%快速进给倍率信号 G096#0~#6 〇 〇 7.1.6.1*IT 互锁信号 G008#0 〇 〇 2.5 *IT1~*IT4 各轴互锁信号 G130 〇 〇 2.5 *JV0~*JV15 手动进给速度倍率信号 G010,G011 〇 〇 3.1 *JV0O~*JV15O 软操作面板信号(*JV0~*JV15) F079,F080 〇 〇 12.1.14*PLSST 多边形主轴停止信号 G038#0 〇 — 6.10.2 *SCPF 主轴夹紧完成信号 G028#5 〇 — 9.7 *SP 进给暂停信号 G008#5 〇 〇 5.1 *SSTP 主轴停止信号 G029#6 〇 〇 9.3 *SSTP1 G027#3 〇 〇 *SSTP2 G027#4 〇 〇 *SSTP3 各主轴停止信号 G027#5 〇 〇 9.9 *SUCPF 主轴松开完成信号 G028#4 〇 — 9.7 * *TLV0~*TLV9 刀具寿命计数倍率信号 G049#0~G050#1 — 〇 10.3 组别 符号 信号名称 地址 T 系M 系列 章节 * *TSB 尾架屏蔽选择信号 G060#7 〇 - 2.3.4 +EXL1~+EXL4 坐标轴方向存储行程限位开关信号 G104 〇 〇 2.3.2 +J1~+J4 进给轴的方向选择信号 G100 〇 〇 3.1 +J1O~+J4O 软操作面板信号(+J1~+J4) F081#0,#2,#4,#6 〇 〇 12.1.14 +LM1~+LM4 行程极限外部设定信号 G110 - 〇 2.3.2 +MIT1,+MIT2 各轴手动进给互锁信号 X004#2,#4 〇 - 2.5 +MIT1,+MIT2 刀具偏移量写入信号 X004#2,#4 〇 - 14.4.2 +MIT1~+MIT4 各轴和方向互锁信号 G132#0~#3 - 〇 2.5 + +OT1~+OT4 行程限位到达信号 F124 - 〇 2.3.2 -EXL1~-EXL4 坐标轴方向存储行程限位开关信号 G105 〇 〇 2.3.2 -J1~-J4 进给轴的方向选择信号 G102 〇 〇 3.1 -J1O~-J4O 软操作面板信号(-J1~-J4) F081#1,#3,#5,#7 〇 〇 12.1.14 -LM1~-LM4 行程极限外部设定信号 G112 - 〇 2.3.2 -MIT1,-MIT2 各轴手动进给互锁信号 〇 - 2.5 -MIT1,-MIT2 刀具偏移量写入信号 X004#3,#5 〇 - 14.4.2 -MIT1~-MIT4 各轴和方向互锁信号 G134#0~#3 〇 〇 2.5 - -OT1~-OT4 行程限位到达信号 F126 - 〇 2.3.2 ABTQSV 伺服轴异常负载检测信号 F090#0 〇 〇 2.9 ABTSP1 第1主轴异常负载检测信号 F090#1 〇 〇 2.9 ABSTP2 第2主轴异常负载检测信号 F090#2 〇 〇 2.9 AFL 辅助功能锁住信号 G005#6 〇 〇 8.2 AICC AI先行控制方式信号 F062#0 - 〇 7.1.12 AL 报警信号 F001#0 〇 〇 2.4 ALMA F045#0 〇 〇 ALMB 报警信号(串行主轴) F049#0 〇 〇 9.2 AR0~AR15 实际主轴速度信号 F040,F041 〇 - 9.6 ARSTA G071#0 〇 〇 A ARSTB 报警复位信号(串行主轴) G075#0 〇 〇 9.2 B00~B31 第2辅助功能代码信号 F030~F033 〇 〇 8.1 BAL 电池报警信号 F001#2 〇 〇 2.4 BCLP B轴夹紧信号 F061#1 - 〇 11.9 BDT1,BDT2~BDT9 跳过任选程序段信号 G044#0,G045〇 〇 5.5 BDTO 软操作面板信号(BDT) F075#2 〇 〇 12.1.14 BF F007#4 〇 - BF 第2辅助功能选通信号(BDT) F007#7 - 〇 8.1 BFIN G005#4 〇 - B BFIN 第2辅助功能结束信号(BDT) G005#7 - 〇 8.4 组别 符号 信号名称 地址 T 系列 M 系列 章节 BGEACT 后台忙信号 F053#4 〇 〇 13.5,13.3 BGEN Power Mate后台忙信号 G92#4 〇 〇 BGIALM Power Mate读/写报警信号 G92#3 〇 〇 BGION Power Mate读/写进行中信号 G92#2 〇 〇 13.5 B BUCLP B轴松开信号 F61#0 - 〇 11.9 CDZ 倒角信号 G053#7 〇 - 11.8 CFINA F046#1 〇 〇 CFINB 主轴切换结束信号(串行主轴) F050#1 〇 〇 9.2 CHPA F046#0 〇 〇 CHPB 动力线切换信号(串行主轴) F050#0 〇 〇 9.2 CLRCH1~CLRCH4 冲撞式参考点设定扭矩极限到达信号 F180 〇 〇 4.6 CON Cs轮廓控制切换信号 G027#7 〇 〇 9.8 CSS 恒表面切削速度信号 F002#2 〇 〇 9.4 CTH1A,CTH2A G070#3,#2 〇 〇 CTH1B,CTH2B 离合器/齿轮档信号(串行主轴) G074#3,#2 〇 〇 9.2 C CUT 切削进给信号 F002#6 〇 〇 2.7 DEFMDA G072#3 〇 〇 DEFMDB 微分方式指令信号(串行主轴) G076#3 〇 〇 9.2 DEN 分配结束信号 F001#3 〇 〇 8.1 DM00 F009#7 〇 〇 DM01 F009#6 〇 〇 DM02 F009#5 〇 〇 DM30 M译码信号 F009#4 〇 〇 8.1 DMMC 直接运行选择信号 G042#7 〇 〇 15.6 DNCI DNC运行选择信号 G043#5 〇 〇 5.9 DRN 空运行信号 G046#7 〇 〇 5.3.2 DRNE 空运行信号(PMC轴控制) G150#7 〇 〇 15.1 DRNO 软操作面板信号(DRN) F075#5 〇 〇 12.1.14 DSCNA G073#4 〇 〇 DSCNB 断线检测无效信号(串行主轴) G077#4 〇 〇 9.2 DSP1,DSP2 主轴电机速度检测信号 Y(n+1)#0,#2 〇 〇 D DSV1~DSV4 伺服电机速度检测信号 Y(n+0) 〇 〇 2.10 EA0~EA6 外部数据输入用地址信号 G002#0~#6 〇 〇 15.2 EABUFA F131#1 〇 〇 EABUFB F134#1 〇 〇 EABUFC F137#1 〇 〇 E EABUFD 缓冲器满信号(PMC轴控制) F140#1 〇 〇 15.1 组别 符号 信号名称 地址 T 系列 M 系列 章节 EACNT1~EACNT4 控制信号(PMC轴控制) F182 〇 〇 EADEN1~EADEN4 分配结束信号(PMC轴控制) F112 〇 〇 EAX1~EAX4 控制轴选择信号(PMC轴控制) G136 〇 〇 EASIP1~EASIP4 轴控制高级指令信号 G200 〇 〇 15.1 EBSYA F130#7 〇 〇 EBSYB F133#7 〇 〇 EBSYC F136#7 〇 〇 EBSYD 轴控制指令读取完成信号(PMC轴控制) F139#7 〇 〇 15.1 EBUFA G142#7 〇 〇 EBUFB G154#7 〇 〇 EBUFC G166#7 〇 〇 EBUFD 轴控制指令读取信号(PMC轴控制) G178#7 〇 〇 15.1 EC0A~EC6A G143#0~#6 〇 〇 EC0B~EC6B G155#0~#6 〇 〇 EC0C~EC6C G167#0~#6 〇 〇 EC0D~EC6D 轴控制指令信号(PMC轴控制) G179#0~#6 〇 〇 15.1 ECKZA F130#1 〇 〇 ECKZB F133#1 〇 〇 ECKZC F136#1 〇 〇 ECKZD 零跟随误差检测信号(PMC轴控制) F139#1 〇 〇 15.1 ECLRA G142#6 〇 〇 ECLRB G154#6 〇 〇 ECLRC G166#6 〇 〇 ECLRD 复位信号(PMC轴控制) G178#6 〇 〇 15.1 ED0~ED15 外部数据输入用的数据信号 G000,G001 〇 〇 15.2 EDENA F130#3 〇 〇 EDENB F133#3 〇 〇 EDENC F136#3 〇 〇 EDEND 辅助功能执行信号(PMC轴控制) F139#3 〇 〇 15.1 EDGN 从装置诊断选择信号 F177#7 〇 〇 13.5 EF 外部运行信号 F008#0 - 〇 11.7 EFD 用于高速接口的外部操作信号 F007#1 - 〇 EFIN 外部操作功能结束信号 G005#1 - 〇 8.4 EFINA G142#0 〇 〇 EFINB G154#0 〇 〇 EFINC G166#0 〇 〇 E EFIND 辅助功能结束信号(PMC轴控制) G178#0 〇 〇 15.1 组别 符号 信号名称 地址 T 系列 M 系列 章节 EGENA F130#4 〇 〇 EGENB F133#4 〇 〇 EGENC F136#4 〇 〇 EGEND 轴移动信号(PMC轴控制) F139#4 〇 〇 EIALA F130#2 〇 〇 EIALB F133#2 〇 〇 EIALC F136#2 〇 〇 EIALD 报警信号(PMC轴控制) F139#2 〇 〇 EID0A~EID31A G146~G149 〇 〇 EID0B~EID31B G158~G161 〇 〇 EID0C~EID31C G170~G173 〇 〇 EID0D~EID31D 轴控制数据信号(PMC轴控制) G182~G185 〇 〇 EIF0A~EID15A G144,G145 〇 〇 EIF0B~EIF15B G156,G169 〇 〇 EIF0C~EIF15C G168,G169 〇 〇 EIF0D~EIF15D 轴控制进给速度信号(PMC轴控制) G180,G181 〇 〇 EINPA F130#0 〇 〇 EINPB F133#0 〇 〇 EINPC F136#0 〇 〇 EINPD 到位信号(PMC轴控制) F139#0 〇 〇 15.1 EKC0~EKC7 键代码信号 G098 〇 〇 EKENB 键代码读取结束信号 F053#7 〇 〇 EKSET 键代码读取信号 G066#7 〇 〇 15.5 ELCKZA G142#1 〇 〇 ELCKZB G154#1 〇 〇 ELCKZC G166#1 〇 〇 ELCKZD 累加零位检测信号 G178#1 〇 〇 EM11A~EM48A F132,F142 〇 〇 EM11B~EM48B F135,F145 〇 〇 EM11C~EM48C F138,F148 〇 〇 EM11D~EM48D 辅助功能代码信号(PMC轴控制) F141,F151 〇 〇 EMBUFA G142#2 〇 〇 EMBUFB G154#2 〇 〇 EMBUFC G166#2 〇 〇 EMBUFD 缓冲禁止信号(PMC轴控制) G178#2 〇 〇 EMFA F131#0 〇 〇 EMFB F134#0 〇 〇 EMFC F137#0 〇 〇 E EMFD 辅助功能选通信号(PMC轴控制) F140#0 〇 〇 15.1 组别 符号 信号名称 地址 T 系列 M 系列 章节 EMSBKA G143#7 〇 〇 EMSBKB G155#7 〇 〇 EMSBKC G167#7 〇 〇 EMSBKD 程序段停禁止信号(PMC轴控制) G179#7 〇 〇 15.1 ENB F001#4 〇 〇 9.3 ENB2 F038#2 〇 - ENB3 主轴使能信号 F038#3 〇 - 9.9 ENBKY 外部键输入方式选择信号 G066#1 〇 〇 15.5 EOTNA F130#6 〇 〇 EOTNB F133#6 〇 〇 EOTNC F136#6 〇 〇 EOTND 负向超程信号(PMC轴控制) F139#6 〇 〇 EOTPA F130#5 〇 〇 EOTPB F133#5 〇 〇 EOTPC F136#5 〇 〇 EOTPD 正向超程信号(PMC轴控制) F139#5 〇 〇 EOV0 倍率0%信号(PMC轴控制) F129#5 〇 〇 15.1 EPARM 从装置参数选择信号 F177#6 〇 〇 13.5 EPN0~EPN13 扩展工件号检索信号 G024#0~ G025#5 〇 〇 EPNS 外部工件号检索开始信号 G25#7 〇 〇 15.3.2 EPRG 从装置程序选择信号 F177#4 〇 〇 ERDIO 从装置外部读取开始信号 F177#1 〇 〇 13.5 EREND 外部数据输入读取结束信号 F060#0 〇 〇 15.2 ERS 外部复位信号 G008#7 〇 〇 5.2 ESBKA G142#3 〇 〇 ESBKB G154#3 〇 〇 ESBKC G166#3 〇 〇 ESBKD 程序段停信号(PMC轴控制) G178#3 〇 〇 15.1 ESEND 外部数据输入检索结束信号 F060#1 〇 〇 15.2 ESKIP 跳转信号(PMC轴控制) X4#6 〇 〇 ESOFA G142#4 〇 〇 ESOFB G154#4 〇 〇 ESOFC G166#4 〇 〇 ESOFD 伺服关断信号(PMC轴控制) G178#4 〇 〇 15.1 ESTB 外部数据输入读取信号 G002#7 〇 〇 E ESCAN 外部数据输入检索取消信号 F60#2 〇 〇 15.2 组别 符号 信号名称 地址 T 系列 M 系列 章节 ESTPA G142#5 〇 〇 ESTPB G154#5 〇 〇 ESTPC G166#5 〇 〇 ESTPD 轴控制暂停信号(PMC轴控制) F178#5 〇 〇 15.1 ESTPIO 从装置读/写停止信号 F177#2 〇 〇 EVAR 从装置宏变量选择信号 F177#5 〇 〇 EWTIO 从装置外部写开始信号 F177#3 〇 〇 13.5 EXLM 存储行程极限选择信号 G007#6 〇 〇 2.3.2 EXOFA F47#4 〇 〇 EXOFB 电机激磁关断状态信号(串行主轴) F51#4 〇 〇 9.2 EXRD 外部读取开始信号 G058#1 〇 〇 EXSTP 外部读取/传出停止信号 G058#2 〇 〇 E EXWT 外部传出开始信号 G058#3 〇 〇 13.5 13.3 F1D F1位进给选择信号 G016#7 - 〇 7.1.5 FIN 结束信号 G004#3 〇 〇 8.1 FSCSL Cs轮廓控制切换结束信号 F044#1 〇 〇 9.8 FSPPH 主轴相位同步控制结束信号 F044#3 〇 〇 F FSPSY 主轴同步速度控制结束信号 F044#2 〇 〇 9.11 G08MD 先行控制方式信号 F066#0 - 〇 7.1.11 GOQSM 刀具偏移量读取方式选择信号 G039#7 〇 - 14.4.2 GR1,GR2 齿轮档选择信号(T型换档) G028#1,#2 〇 〇 9.3 GR1O,GR2O,GR3O 齿轮档选择信号(M型换档) F034#0~#2 - 〇 9.3 G GR21 齿轮档选择信号(输入) G029#0 〇 - 9.9 HDO0 高速跳转状态信号 F122#0 〇 〇 14.3.2 HROV 1%快速进给倍率选择信号 G096#7 〇 〇 7.1.6.1 HS1A~HS1D 手轮进给轴选择信号 G018#0~#3 〇 〇 3.2 HS1AO 软操作面板信号(HS1A) F077#0 〇 〇 12.1.14 HS1BO 软操作面板信号(HS1B) F077#1 〇 〇 12.1.14 HS1CO 软操作面板信号(HS1C) F077#2 〇 〇 12.1.14 HS1DO 软操作面板信号(HS1D) F077#3 〇 〇 12.1.14 HS1IA~HS1ID 手轮中断轴选择信号 G041#0~#3 〇 〇 3.3 HS2A~HS2D 手轮进给轴选择信号 G018#4~#7 〇 〇 3.2 HS2IA~HS2ID 手轮中断轴选择信号 G041#4~#7 〇 〇 3.3 HS3A~HS3D 手轮进给轴选择信号 G019#0~#3 - 〇 3.2 H HS3IA~HS3ID 手轮中断轴选择信号 G042#0~#3 - 〇 3.3 组别 符号 信号名称 地址 T 系列 M 系列 章节 IGNVRY 所有轴VRDY OFF报警忽略信号 G066#0 〇 〇 IGVRY1~IGVRY4 各轴VRDY OFF报警忽略信号 G192 〇 〇 2.8 INCH 英制输入信号 F002#0 〇 〇 11.4 INCMDA G072#5 〇 〇 INCMDB 增量指令外部设定方式定向信号(串行主轴) G076#5 〇 〇 INCSTA F047#1 〇 〇 INCSTB 增量方式定向信号(串行主轴) F051#1 〇 〇 INDXA G072#0 〇 〇 INDXB 准停位置改变信号(串行主轴) G076#0 〇 〇 9.2 INHKY 键输入禁止信号 F053#0 〇 〇 15.5 INP1~INP4 到位信号 F104 〇 〇 7.2.4.1 INTGA G071#5 〇 〇 INTGB 速度积分控制信号(串行主轴) G075#5 〇 〇 9.2 IOLACK I/O Link确认信号 G092#0 〇 〇 13.5 IOLBH2 G199#0 〇 〇 IOLBH3 手摇脉冲发生器选择信号 G199#1 〇 〇 16.1 IOLNK 从装置I/O Link选择信号 F177#0 〇 〇 13.5 IOLS I/O Link指定信号 G092#1 〇 〇 13.5 I IUDD1~IUDD4 异常负载检测忽略信号 G125 〇 〇 2.9 KEY1~KEY4 存储器保护信号 G046#3~#6 〇 〇 12.2.3 K KEYO 软操作面板信号(KEY1~KEY4) F075#6 〇 〇 12.1.14 LDT1A F045#4 〇 〇 LDT1B 负载检测信号1(串行主轴) F049#4 〇 〇 9.2 LDT2A F045#5 〇 〇 L LDT2B 负载检测信号2(串行主轴) F049#5 〇 〇 9.2 M00~M31 辅助功能代码信号 F010~F013 〇 〇 8.1 M200~M215 第2M功能代码信号 F014~F015 〇 〇 8.3 M300~M315 第3M功能代码信号 F016~F017 〇 〇 8.3 MA CNC就绪信号 F001#7 〇 〇 2.2 MABSM 手动绝对值检测信号 F004#2 〇 〇 5.4 MAFL 辅助功能锁住检查信号 F004#4 〇 〇 8.2 MBDT1,MBDT2~MBDT9 跳过任选程序段检测信号 F004#0,F005 〇 〇 5.5 MCFNA G071#3 〇 〇 MCFNB 动力线切换结束信号(串行主轴) G075#3 〇 〇 9.2 MCHK 检测方式手轮有效信号 G067#3 〇 - 5.3.4 M MD1,MD2,MD4 方式选择信号 G043#0~#2 〇 〇 2.6 组别 符号 信号名称 地址 T 系列 M 系列 章节 MD1O 软操作面板信号(MD1) F073#0 〇 〇 MD2O 软操作面板信号(MD2) F073#1 〇 〇 MD4O 软操作面板信号(MD4) F073#2 〇 〇 12.1.14 MDRN 空运行检测信号 F002#7 〇 〇 5.3.2 MEDT 存储器编辑选择检测信号 F003#6 〇 〇 2.6 MF 辅助功能选通信号 F007#0 〇 〇 8.1 MF2 第2M功能选通信号 F008#4 〇 〇 MF3 第3M功能选通信号 F008#5 〇 〇 8.3 MFIN 辅助功能结束信号 G005#0 〇 〇 MFIN2 第2M功能结束信号 G004#4 〇 〇 MFIN3 第3M功能结束信号 G004#5 〇 〇 8.4 MFNHGA G072#6 〇 〇 MFNHGB 改变主轴信号时主主轴MCC状态信号(串行主轴) G076#6 〇 〇 9.2 MH 手轮进给选择检测信号 F003#1 〇 〇 2.6 MI1~MI4 镜像信号 G106 〇 〇 1.2.5 MINC 增量进给选择检测信号 F003#0 〇 〇 2.6 MINP 外部程序输入开始信号 G058#0 〇 〇 13.4 MJ JOG进给选择检测信号 F003#2 〇 〇 2.6 MLK 所有轴机床锁住信号 G044#1 〇 〇 MLK1~MLK4 各轴机床锁住信号 G108 〇 〇 5.3.1 MLKO 软操作面板信号(MLK) F075#4 〇 〇 12.1.14 MMDI 手动数据输入选择检测信号 F003#3 〇 〇 MMEM 自动运行选择检测信号 F003#5 〇 〇 2.6 MMI1~MMI4 镜像检测信号 F108 〇 〇 1.2.5 MMLK 所有轴机床锁住检测信号 F004#1 〇 〇 5.3.1 MMOD 检测方式信号 G067#2 〇 ― MNCHG 反向禁止信号 F091#1 〇 ― 5.3.4 MORA1A F046#6 〇 〇 MORA1B 用磁传感器的主轴定位结束信号(串行主轴) F050#6 〇 〇 MORA2A F046#7 〇 〇 MORA2B 用磁传感器的主轴定位接近信号(串行主轴) F050#7 〇 〇 MORCMA G073#0 〇 〇 MORCMB 用磁传感器的主轴定位指令(串行主轴) G077#0 〇 〇 9.2 M MP1,MP2 手轮进给倍率选择信号 (增量进给信号) G019#4,#5 〇 〇 3.2 。
实时断轨检测系统中信号采集注意事项
实时断轨检测系统中信号采集注意事项对于实时断轨检测系统中的信号采集,以下是一些注意事项:
传感器选择:选择适合特定应用场景的传感器。
考虑到环境条件、检测目标以及需要采集的信号类型等因素,选择具有高精度和稳定性的传感器。
采样率和分辨率:确定合适的采样率和分辨率以确保捕获到足够的信息,并保证数据质量。
根据信号频率和变化速度合理设置采样率,并选择足够高的分辨率以保留细节。
信号滤波:为了减少噪声和干扰对信号的影响,可以使用数字滤波技术对采集的信号进行滤波处理。
根据需要,选择适当的低通、高通或带通滤波器来平滑信号并去除不必要的频率成分。
数据同步:确保采集系统中各个传感器和设备之间的时间同步。
采用相同的时间基准,并采取同步措施,如时钟同步或时间戳标记,以确保数据的一致性和准确性。
抗干扰能力:针对可能存在的电磁干扰或其他干扰源,采取必要的措施来保护信号采集系统。
例如,使用屏蔽线缆、电磁屏蔽罩等方式来隔绝干扰源。
数据质量监测:监测并评估采集到的信号数据的质量。
可以通过实时监测数据的幅值范围、频谱特征等指标来判断采集系统的运行状态,及时发现异常情况并进行处理。
数据存储和备份:确保信号数据的安全性和可靠性,采取适当的存储和备份措施。
选择合适的存储介质,并建立备份策略,以防止数
据丢失或损坏。
请注意,在实时断轨检测系统中的信号采集过程中,应遵守相关的安全规范和操作流程,确保操作人员和设备的安全。
SG警报指示器使用说明书

警报指示器(8 路)
分线箱
3
重量 2Kg 1.3Kg 2Kg 1.3Kg 2Kg 17Kg 18Kg 18Kg 20Kg 2Kg 1.6Kg 2Kg 1.6Kg 2Kg 1.6Kg 2Kg
防护等级 IP44 IP20 IP44 IP20 IP22 IP44 IP44 IP44 IP44 IP44 IP20 IP44 IP20 IP44 IP20 IP22
备注 主电源 AC220V 备用电源 DC24V
主电源 AC220V 备用电源 AC220V
3 基本功能
所有的输入端口均为常开触点,检测到触点闭合时启动警报指示器工作。 当有电话呼 叫 时 ,SGB 系 列警报指示器上电话呼叫报警指示灯闪光,扬声器发 出 800Hz,1S 通 ,1S 断的 断续报警 音,黄色 转灯工作 。SGF 系列 警报指示 器上电话 呼 叫 警指示灯闪光,蜂鸣 器发出 800Hz,1S 通 ,1S 断断续的报警声。 当 有 车 钟 报 警 时 ,SGB 系 列 警 报 指 示 器 上 车 钟 报 警 指 示 灯 闪 光 ,扬 声 器 发 出 800H z, 0.5S 通,0.5S 断的 断续 报警音,黄色转灯 工作。SGF 系列警报 指示器上 车钟报警 指 示 灯闪光,蜂鸣器发出 800Hz,0.5S 通,0.5S 断断 续的报警声。 当 有 机 器 故 障 时 , SGB 系 列 警 报 指 示 器 上 机 器 故 障 指 示 灯 闪 光 , 扬 声 器 发 出 800Hz/1000Hz 的转换报 警音,黄 色转灯工 作。SGF 系 列警报指 示器上机 器故障指 示 灯 闪光,蜂鸣器发出断续的报警声。 当有通用紧 急 报 警时 , SGB 系 列警报指示器上通用紧急报警指示灯闪光,扬声器
1.3 型号及其含义
PMC诊断功能在数控机床故障诊断与维修中的应用

1狙叠 ■ ~l_ n 0 l~儿 ju
3 3 f T 2. s 一 0 0呻 …
2 T6 s 0 一叩 ~ O 一 0 - 咖L 0 — 0 — … O- o _ e 1H 0 -O 一 n J ~O 』 一 加 O o_ol ̄ 一 o -f 0
0 一 删 ∞ 一 一 0 00 0… 一 ∞ 册
一—』 nl ~ 10l _ ● ul nJ¨L Ⅲ I ) l 0 L — 叫 f l L- I — L
一 o uo o 一 一 u o oe 卫 一 瑚 一 一 』 ¨I 瑚 一 — I D —
Maf n t n Dig o e a d M ane a c l ci a n s n it n n e u o
HAN h o h n M A n n S a c e g, Yu dig
( hn ai a H ayD t Tu kG opJ a xe T as i i o 。t. J a 5 0 0 C N) C iaN t n l ev uy rc ru i nA l rnm s o C . Ld , nn2 0 0 , H o n & sn i
键后将 进入 T A E画 面 , 图 2 R C 见 。限 于 篇 幅 , 于 设 关
定 画 面 中将 “ R G A P O R MME R
EAL N B E”设 置 为 “ E ”、 YS “ L O P CS O ” A L W M T P 设置 为
“YES”、 “RAM RI ENA— W TE
在数控 机床 故障诊 断与维 修 中的应用 , 使其 能快速 、 准确地 确定 和排 除故障 。 关键词 : 数控 机床 P MC 故障 维修
Ap l a in o pi t fPMC a n s u cin i h c o Dig o e F n t n t e CNC Ma hn o c ie
我的世界检测器的正确使用方法

我的世界检测器的正确使用方法
要正确使用《我的世界》中的检测器,你可以按照以下步骤进行操作:
1. 获取检测器:在创造模式下,打开创造菜单并搜索“检测器”或使用命令/give @p detector,你就能得到一个检测器。
2. 放置检测器:将检测器放置在你希望监测的地方。
它可以被放置在地面、墙上或者其他方块上。
3. 选择监测方式:使用右键点击检测器来打开它的界面。
你可以看到一个红色的方框,代表了监测的范围。
通过点击下方的按钮,你可以选择监测方块、监测实体或监测投掷物。
4. 设置监测条件:根据你选择的监测方式,你可以设置进一步的监测条件。
例如,如果你选择了监测方块,你可以选择特定的方块类型。
如果你选择了监测实体,你可以选择监测特定类型的生物或玩家。
5. 调整信号输出:在界面的右侧,你可以选择检测到对应物体后,检测器会发送的信号强度。
你可以通过拖动滑块或直接输入数值来调整信号强度。
6. 链接输出信号:将输出信号连接到你需要的地方,如红石电路或其他机制。
你可以将红石线连接到检测器的一侧。
信号强度仅取决于检测到的物体的数量,
而不取决于它们离检测器有多远。
7. 测试和调试:完成上述步骤后,你可以测试一下检测器是否能正常工作。
通过触发监测条件,看看是否能够正确地输出对应的信号。
希望以上步骤对你使用《我的世界》中的检测器有所帮助!。
跟踪接收机原理

跟踪接收机原理
跟踪接收机是一种用于精确测量信号源的设备,其原理基于频域和时域分析技术。
它由接收天线、低噪声放大器、解调器和信号处理单元等结构组成。
以下是跟踪接收机的工作原理:
1. 初始搜索阶段:接收机扫描一定频率范围内的信号,找到目标信号的大致位置。
2. 跟踪阶段:接收机不断调整自身频率和相位,以保持与目标信号的同步。
3. 锁定阶段:接收机成功跟踪目标信号,可以进行信号的解调、处理和显示。
此外,跟踪接收机还利用多普勒频移原理,捕捉信号源发出的信号,并将其解调出基频信号。
当信号源与接收机之间存在相对运动时,会产生多普勒频移,通过测量频偏可计算出信号源的位置和速度信息。
跟踪接收机具有高灵敏度、低噪声、抗干扰能力强等优势,应用场景广泛,包括卫星通信、雷达监测、导弹制导等军事领域,以及无人机控制、交通管制等民用领域。
以上内容仅供参考,如需更多信息,建议查阅相关文献或咨询专业人士。
发那科FANUC硬件接口及连接

与手摇脉冲发生器的连接
使用手摇脉冲发生器时的电缆长度 手摇脉冲发生器和脉冲编码器一样使用5V 直 流电源。电缆电阻引起的电压降不能超过 0.2V(5V 对0 的压降)。 0.2 ≥(0.1 × R ×2L)/M 其中: 0.1:为电源给手动脉冲编码器的电流,等于0.1A。
I/O模块外形图
I/O模块型号规格
I/O模块耗费电流
I/O 模块连接插脚图
DI 信号和接收器
DI 信号基本上是属于漏极型。有些DI 信号既可以被设为漏极型又可以被设为 源极型。 I/O 板为可选接收器提供了一个公共信 号。公共信号连接到0V 还是24V 决定 了DI 信号是漏极型的还是源极型的。 源极型的DI 信号从安全观点来看是不可 取的,因为若输入信号线地,它就会保 持和触点闭合相同的状态,所以推荐所 有的DI 信号都设置为漏极型。 将公共端信号连接在0V 或24V,不能悬 空。
RS-232-C通讯电缆
9芯PC 1 2 3 4 5 6 7 8 9 25NC 1 2SD 3RD 4RS 5CS 6DR 7SG 8CD 20ER 20(0-MC) 9SD 8RD 20RS 19CS 18DR 17SG 16CD 5ER 20(0I) 11SD 1RD 15RS 5CS 3DR 16SG 7CD 13ER
电缆卡紧及屏蔽
CNC 需要进行屏蔽的电缆必须进行卡 紧。 目的是为了支撑电缆和电缆屏蔽。保证 CNC 系统操作的稳定性, 将电缆外层剥掉一块露出屏蔽层。用电 缆卡子夹紧此处,并卡在地线板上。
外部24VDC 电源(稳压电源)指标:
高速跳转信号(HDI)的连接
SG2009用户手册
11
三爱仪器
3.2.5 彩条选择
SG-2009 用户手册
两种不同形式的彩条供用户选择 3.2.6 灰阶选择
4 种不同级数的阶梯供用户选择
四、遥控开关控制盒操作
HDMI/DVI
HDCP
REAUTH
LOOP
HDMI/DVI: 数字输出端口切换键,按下该键数字输出端口即由 DVI 转为 HDMI,或由 HDMI 转为 DVI,当 HDMI 输出端口有效时所有模拟输出被关闭。
循环功能— 循环显示预设制式与图像 按下 RP1---3 中任意一键后,即可使用遥控开关循环输出预设的信号
2.2 后面板:
8
三爱仪器
SG-2009 用户手册
后面板主要包括各种输出端口、控制端口、USB 下载端口和电源开关组成。 输出端口包括 HDMI 端口、DVI 端口、VGA 端口、YPbPr、CVBS、Y/C 及音频的左右 声道。 控制端口用来联接遥控开关盒。
二、面板操作
2.1 前面板介绍
SG-2009 用户手册
前面板由 LCD 显示屏、菜单控制、制式选择、静态图象选择、动态图象选择、循环 RP1-3 等六部分组成。
LCD 显示屏 — 显示制式、图象以及控制的相关信息。
菜单控制
功能设置键
左键
上键
右键
6
三爱仪器
SG-2009 用户手册
下键
进行功能的选择,中心“SET”键进入系统功能主菜单设置界面,右键为选择下级 菜单或确认当前选择,左键返回上级菜单或取消当前菜单,上下键控制菜单的滚动。 制式选择 —进行输出制式的选择。
HDCP:该键使能 HDCP 或取消 HDCP 功能,在 HDCP 模式下当前选择的数字端口 DVI 或 HDMI 输出信号被加密,HDCP 模式时所有模拟输出端口无效。
M2000信令跟踪说明
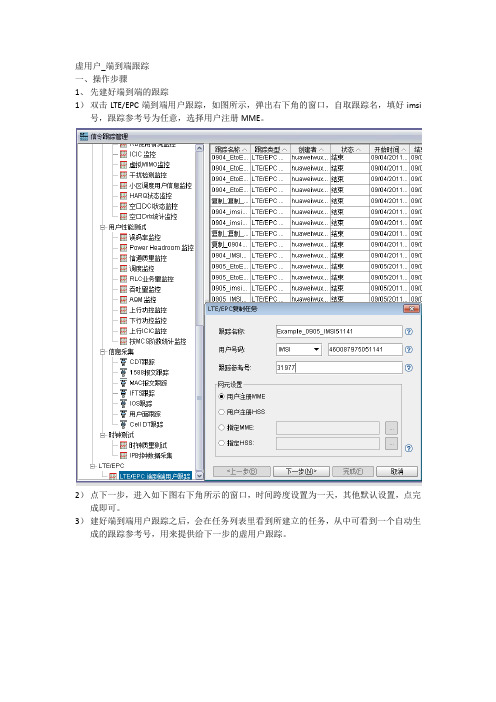
虚用户_端到端跟踪一、操作步骤1、先建好端到端的跟踪1)双击LTE/EPC端到端用户跟踪,如图所示,弹出右下角的窗口,自取跟踪名,填好imsi 号,跟踪参考号为任意,选择用户注册MME。
2)点下一步,进入如下图右下角所示的窗口,时间跨度设置为一天,其他默认设置,点完成即可。
3)建好端到端用户跟踪之后,会在任务列表里看到所建立的任务,从中可看到一个自动生成的跟踪参考号,用来提供给下一步的虚用户跟踪。
2虚用户跟踪双击LTE虚用户跟踪,弹出如下图右下角的窗口,自取跟踪名称,跟踪参考号填写在上一步端到端跟踪里自动生成的跟踪参考号。
时间跨度为一天,确定即可。
二、注意事项:端到端用户跟踪的参考号与虚用户跟踪参考号必须一致!S1口信令跟踪一、操作步骤1)双击s1标准信令跟踪,弹出如下窗口,自取跟踪名,网元选所要跟踪的基站,无需选开始与结束时间,任务类型首选采集端口,直到采集端口任务满了再选服务器端口。
2)点击下一步,弹出如下图所示,全部默认设置,点击完成即可。
二、注意事项S1信令跟踪任务只能维持一个小时,一个小时后任务会自动停止,需要重新建立!Uu口信令跟踪任务一、操作步骤双击uu标准信令跟踪,弹出如下窗口,自取跟踪名,网元选所要跟踪的基站,无需选开始与结束时间,任务类型首选采集端口,直到采集端口任务满了再选服务器端口。
2)点击下一步,弹出如下图所示,全部默认设置,点击完成即可。
二、注意事项uu信令跟踪任务只能维持一个小时,一个小时后任务会自动停止,需要重新建立!小区性能跟踪一、操作步骤1、双击总吞吐量监控,弹出如图所示窗口。
自取跟踪名称,选择所要跟踪的小区所在的基站。
时间跨度设置为一天。
任务类型选择服务器任务。
2、点击下一步。
本地小区ID填小区所在的基站物理本地小区标识。
然后点击完成即可。
小区用户数监控一、操作步骤1双击小区用户数监控,弹出如下图所示窗口。
自取名称,选择所要跟踪的小区所在的基站。
时间跨度设置为一天,任务类型选服务器类型。
发那科系统维修与维护FANUC

干扰与抗干扰
抗干扰措施
①接地
信号地〔SG〕:供给信号使用的基准电平0V。
机壳地〔FG〕:抵抗干扰而提供的将内部和外部噪音隔离的屏蔽层,
各单元机壳、外罩、安装板和电缆的屏蔽均应接在一起。
机床地〔PE〕:保护地。各装置的机壳地和大地相连,保护人员免予触
电危险的同时还可使干扰噪音流入大地。
系统接地原那么:三地合一。
条件1
ALM
条件2
条件3 条件4
因为信号为瞬间出现,所以可以通过追踪功能分析产生的原因。
PMC信号的追踪 追踪应用例: 报警出现时,追踪的结果。
条件1 条件2 条件3 条件4 ALM
结论:条件3的瞬间导通产生报警,导通时间为 14×8ms=112ms
系统常见报警
系统报警 系统的报警画面组成
【画面说明】 ① 装置名称、系统主软件版本 ② 系统报警号及错误信息 ③ 可能性最大的不良部位 ④ 错误发生时刻 ⑤ 错误发生时的软件信息 ⑥ 错误发生时的总线信息
位置调整: ①执行主轴定向,完成后复位退出定向状态,保持主轴自由状态。 ②盘动主轴至要求位置,读取诊断445数值〔需先设定No3117#1=1〕 ③将该值设定至No4077中即可〔设定时注意No4033需清零〕
轴的屏蔽方法
伺服放大器的屏蔽 正常设定
轴 CO卡P10
A 系统
FSSB
NC第一轴 NC第二轴 NC第三轴 NC第四轴
原点位置与定向位置的调整 原点位置的调整 间隔 码光栅尺参考点的调整
测参考点的偏移量补偿到No1883中。 注:No1883设定单位为最小检测单位。
原点位置与定向位置的调整
定向位置的调整 应用场合: ①重新设定定向位置时。 ②拆卸电机与主轴的连接,或主轴电机传感器后。〔以电机传感器作定 位 时〕 ③拆卸主轴编码器与主轴的连接后。
使用5G网络进行远程定位追踪的技巧与方法

使用5G网络进行远程定位追踪的技巧与方法随着5G网络的广泛应用和不断发展,远程定位追踪技术的应用前景愈发广阔。
无论是在个人生活还是商业领域,利用5G网络进行远程定位追踪已经成为一种有力的工具。
本文将介绍一些使用5G网络进行远程定位追踪的技巧与方法,帮助您更好地应用于实践。
1.选择适合的设备与技术在使用5G网络进行远程定位追踪之前,首先需要选择适合的设备和技术。
目前市场上有各种各样的追踪设备,如GPS追踪器、蓝牙追踪器等。
其中,GPS追踪器被广泛应用于车辆和物品的追踪,而蓝牙追踪器则适用于近距离追踪,如追踪家庭成员的位置等。
还可以使用手机定位追踪软件,通过手机的位置信息进行定位追踪。
2.了解相关法规和道德规范在进行远程定位追踪之前,必须了解相关的法律法规和道德规范。
不同国家和地区对于远程定位追踪有着不同的限制和要求。
因此,在进行追踪之前,确保自己的行为符合当地的法律法规,并且尊重他人的隐私权。
3.保护追踪设备和网络安全在进行远程定位追踪时,设备和网络的安全至关重要。
确保追踪设备的密码安全,并定期更换密码以防止被他人利用。
使用网络安全软件保护网络不受恶意攻击。
选择可靠的网络服务提供商,确保追踪数据的安全传输。
4.使用云端存储追踪数据运用云端存储追踪数据是使用5G网络进行远程定位追踪的一种常见方法。
通过将追踪数据存储在云端,您可以随时随地访问和控制追踪设备。
同时,云端存储还提供了数据备份和防止设备丢失的功能,确保追踪数据的安全性和可靠性。
5.优化追踪算法和技术远程定位追踪技术的准确性和可靠性直接影响着追踪的效果。
因此,优化追踪算法和技术是必不可少的。
通过不断的实验和调试,改进追踪算法和技术,使其更加精准和高效。
总之,通过5G网络进行远程定位追踪已经成为一种方便和实用的工具。
然而,我们在使用这项技术的同时也要注意保护个人隐私和遵守相关法规与道德规范。
只有在合法和合理的前提下,我们才能更好地应用这项技术,为个人和商业领域带来更多的便利和效益。
使用MCC学习PIC单片机–SMT信号测量定时器

使用MCC学习PIC单片机–SMT信号测量定时器在嵌入式系统中,PIC单片机广泛应用于各种应用领域,例如自动控制、通信、仪器仪表等。
为了实现这些功能,对于外部信号的测量和定时器的应用尤为重要。
本文将介绍如何使用MCC(MPLAB Code Configurator)学习PIC单片机的SMT(Signal Measurement Timer)的应用。
首先,我们需要了解SMT的基本概念和原理。
SMT是PIC单片机中的一种特殊定时器,它通过测量外部信号的频率、周期或者脉宽来实现信号的测量。
SMT的输入可以选择作为外部时钟源或者触发源,可以通过软件配置定时器的工作模式和参数,并且可以在定时器溢出时触发中断。
第一步是创建一个新的MCC项目,并选择适合的PIC单片机型号。
在MCC中,我们可以选择使用SMT模块,并配置SMT的参数,如输入源、计数模式、定时器溢出周期等。
可以通过MCC提供的图形化界面来设置这些参数,也可以通过MCC生成的代码来修改这些参数。
第二步是生成初始化代码。
MCC会根据我们在图形化界面中所做的配置,生成相应的初始化代码。
这些代码包括了配置寄存器、初始化定时器以及中断服务例程等。
我们可以将这些代码复制到我们的项目中,并根据需要进行修改。
第三步是编写我们自己的代码。
根据我们的具体应用需求,我们可以在定时器中断服务例程中编写相应的代码。
例如,我们可以在定时器溢出时读取SMT模块的计数值,然后进行相应的处理。
在编写代码的过程中,我们可以参考MCC生成的代码,并且可以使用MCC提供的其他功能和组件,如ADC、UART等。
第四步是编译和调试代码。
使用MCC生成的代码后,我们可以使用MPLABIDE进行编译和调试。
MCC生成的代码结构清晰,并且易于理解和修改,因此可以帮助我们更快地找到和解决问题。
最后,我们可以将生成的代码烧录到PIC单片机中,并通过外部信号对SMT进行测试和验证。
通过反复测试和调试,我们可以逐步优化代码并实现我们所需的功能。
5020SG消息跟踪(MSUTRACE)详解

5020SG消息跟踪(MSUTRACE)详解5020SG 消息跟踪详解作者:俞佳苗⽬录1,消息跟踪的概念和应⽤ (2)2,消息跟踪的操作 (4)2.1 菜单⽅式设置跟踪条件 (4)2.1.1 增加跟踪条件组 (5)2.1.2 查看跟踪条件 (7)2.1.3 删除跟踪条件组 (8)2.1.4 启动MSU跟踪 (9)2.1.5 停⽌MSU跟踪 (10)2.2 命令⾏⽅式设置跟踪条件 (11)2.2.1 增加跟踪条件组 (13)2.2.2 查看跟踪条件 (14)2.2.3 删除跟踪条件组 (15)2.2.4 启动MSU跟踪 (15)2.2.5 停⽌MSU跟踪 (15)2.3 查看跟踪到的消息和消息解包 (16)2.3.1 实时的消息查看和解包 (16)2.3.1 ⾮实时的消息查看和解包 (17)2.3.1.1 简单解码⽅式 (17)2.3.1.2 tshark详细解码⽅式 (18)2.3.1.3 下载到本地的解码⽅式 (26)3,消息跟踪问题的解决 (27)1,消息跟踪的概念和应⽤这⾥只讲述5020SG P5PLUS版本的消息跟踪。
消息跟踪可以在任意链路或偶联上跟踪MTP3层的消息,跟踪下来的消息从SIO 位开始,不包含SIO位前的包头。
消息跟踪的原理是,在OAM上设置某些链路或偶联的过滤条件,然后发命令给SLN7S。
SLN7S收到命令后,根据设置的过滤条件,把符合条件的消息复制⼀份给OAM,并在OAM上保存。
可以设置的过滤(跟踪)条件有:1,收发⽅向,收还是发。
MTP部分的DPC,OPC,SSF,SI和H1H0。
-- SIO:业务信息指⽰⼋位位组。
SIO⼜分为两个⼦字段,各占4⽐特。
其中SI为业务指⽰语,SSF为⼦业务字段,其编码⽅式和含义为:SI:D C B A0 0 0 0 信号⽹管理消息0 SNM(包含的H1H0有RST)0 0 0 1 信号⽹测试和维护消息 1 MTN(包含的H1H0有SLTM和SLTA)0 0 1 0 备⽤ 20 0 1 1 SCCP 30 1 0 0 TUP 40 1 0 1 ISUP 50 1 1 0 DUP(与呼叫和电路有关的消息) 60 1 1 1 DUP(性能登记和撤消消息)71 0 0 0 ⾄1 1 1 1 备⽤SSF:D C ⽹络指⽰语0 0 国际⽹00 1 国际备⽤ 11 0 国内⽹ 21 1 国内备⽤ 3B A 为备⽤⽐特。
敌我识别S模式询问信号实时检测技术

敌我识别S模式询问信号实时检测技术高新平【摘要】为了在非合作条件下实时截获敌我识别S模式询问信号,分析了S模式询问信号特征,并提出敌我识别S模式询问信号实时检测技术.通过脉冲信号检测、时域参数测量和脉冲分选技术,实时检测S模式询问信号,获取采用差分相移键控(DPSK)编码的数据,并在现场可编程门阵列(FPGA)中进行了实现和验证,试验结果表明,该检测技术能够有效地检测并截获敌我识别S模式询问信号.【期刊名称】《无线电工程》【年(卷),期】2016(046)006【总页数】3页(P27-29)【关键词】敌我识别;S模式询问信号;时域参数测量;脉冲分选【作者】高新平【作者单位】中国电子科技集团公司第五十四研究所, 河北石家庄050081【正文语种】中文【中图分类】TN919.3敌我识别信号有2种编码方式[1]:脉冲编码和差分相移键控(DPSK)编码。
采用脉冲编码的信号,如MARK X模式和MARK XII(4)模式,对其侦收时可通过脉冲信号检测和时域参数测量实时获取脉冲宽度、脉冲间隔和脉冲幅度等信息,经过后续的脉冲分选和信号解调即可获取飞机身份号码等信息。
采用DPSK编码的信号,如S模式询问信号,需要对原始零中频信号进行解调才能获取飞机状态关键参数信息,如方位和高度信息等。
这需要对时域参数测量结果实时地进行脉冲分选和模式识别,并截取S模式原始零中频信号。
由于目前的电磁环境越来越复杂,在宽带接收条件下,存在多目标脉冲随机交叠的情况,且脉冲分选算法需要一定的时间,这更增加了对S模式信号实时侦测的难度。
因此,研究利用敌我识别信号时域特征实现对S模式信号的实时检测技术,在工程实践中有重要意义。
敌我识别信号是一类重要且特殊的非通信信号,主要完成空中目标身份及属性的确认,以及报告目标飞行状态参数等。
目前,常用的敌我识别信号主要有Mark X、Mark XII和S模式[2]等,每种模式又分为询问和应答信号2种,询问信号载频为1 030 MHz,应答信号载频为1 090 MHz。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图形方式:YT方式 【操作】列选择“Bit“ 【输入1】列设置通道号 【输0 Bit1 Bit2 Bit3 Bit4 Bit5 Bit6 Bit7
用于改变信号的顺序
2
⑥操作演示设定完毕后根据需要设定触发条件 ⑦返回至图形画面,按【测量】按钮开始信号追踪
此 处 显 示 通 道 与
①设定PMC采样周期,如不设定则在通道设定 时无法从【轴】设定项中选择”PMC(-127)”
②勾选CH1,并双击 进行通道设定
③通道设定:【轴】下拉菜单中选 择“PMC(-127)”,【种类】选择 “PMC”
④使用“追加”“修改”“删除” 按钮添加欲追踪的PMC信 号
1
⑤操作演示设定,根据PMC信号的数量将添加的PMC地址与8个通道依次对应。
信 号 的 对 应
PMC
注:SG帮助文件中关于PMC信号追踪的介绍不够详细及明确,具体工作中可适当参考本文。
3