Microcontroller and embedded systems
嵌入式系统简介和组成部分说明书
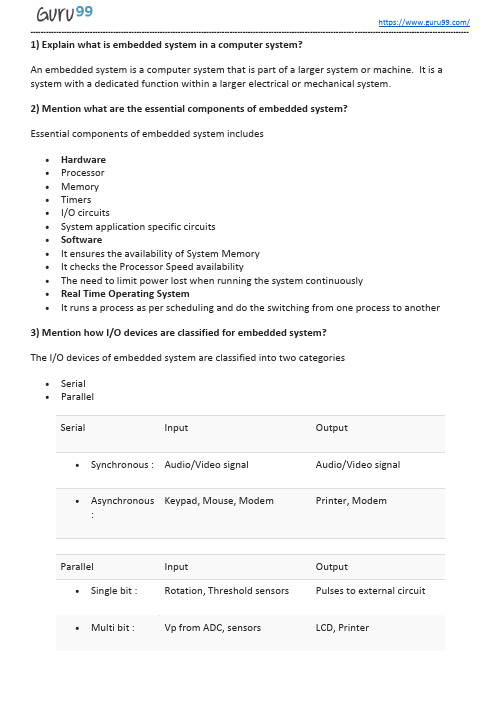
1) Explain what is embedded system in a computer system?An embedded system is a computer system that is part of a larger system or machine. It is a system with a dedicated function within a larger electrical or mechanical system.2) Mention what are the essential components of embedded system?Essential components of embedded system includes•Hardware•Processor•Memory•Timers•I/O circuits•System application specific circuits•Software•It ensures the availability of System Memory•It checks the Processor Speed availability•The need to limit power lost when running the system continuously•Real Time Operating System•It runs a process as per scheduling and do the switching from one process to another 3) Mention how I/O devices are classified for embedded system?The I/O devices of embedded system are classified into two categories•Serial•Parallel•Synchronous : Audio/Video signal Audio/Video signal•Single bit : Rotation, Threshold sensors Pulses to external circuit•Multi bit : Vp from ADC, sensors LCD, Printer4) Why embedded system is useful?With embedded system, it is possible to replace dozens or even more of hardware logic gates, input buffers, timing circuits, output drivers, etc. with a relatively cheap microprocessor.5) Explain what are real-time embedded systems?Real-time embedded systems are computer systems that monitor, respond or control an external environment. This environment is connected to the computer system through actuators, sensors, and other input-output interfaces.6) Explain what is microcontroller?The microcontroller is a self-contained system with peripherals, memory and a processor that can be used as embedded system.7) Mention what is the difference between microprocessor and microcontroller? Microprocessor is managers of the resources (I/O, memory) which lie outside of its architecture Microcontroller have I/O, memory, etc. built into it and specifically designed for control8) What does DMA address will deal with?DMA address deals with physical addresses. It is a device which directly drives the data and address bus during data transfer. So, it is purely physical address.9) Explain what is interrupt latency? How can you reduce it?Interrupt latency is a time taken to return from the interrupt service routine post handling a specific interrupt. By writing minor ISR routines, interrupt latency can be reduced.10) Mention what are buses used for communication in embedded system?For embedded system, the buses used for communication includes•I2C: It is used for communication between multiple ICs•CAN: It is used in automobiles with centrally controlled network•USB: It is used for communication between CPU and devices like mouse, etc.While ISA, EISA, PCI are standard buses for parallel communication used in PCs, computer network devices, etc.11) List out various uses of timers in embedded system?Timers in embedded system are used in multiple ways•Real Time Clock (RTC) for the system•Initiating an event after a preset time delay•Initiating an even after a comparison of preset times•Capturing the count value in timer on an event•Between two events finding the time interval•Time slicing for various tasks•Time division multiplexing•Scheduling of various tasks in RTOS12) Explain what is a Watchdog Timer?A watchdog timer is an electronic device or electronic card that execute specific operation after certain time period if something goes wrong with an electronic system.13) Explain what is the need for an infinite loop in embedded systems?Embedded systems require infinite loops for repeatedly processing or monitoring the state of the program. For instance, the case of a program state continuously being verified for any exceptional errors that might just happen during run-time such as memory outage or divide by zero, etc.14) List out some of the commonly found errors in Embedded Systems?Some of the commonly found errors in embedded systems are•Damage of memory devices static discharges and transient current•Address line malfunctioning due to a short in circuit•Data lines malfunctioning•Due to garbage or errors some memory locations being inaccessible in storage•Inappropriate insertion of memory devices into the memory slots•Wrong control signals15) Explain what is semaphore?A semaphore is an abstract datatype or variable that is used for controlling access, by multiple processes to a common resource in a concurrent system such as multiprogramming operating system. Semaphores are commonly used for two purposes•To share a common memory space•To share access to files16) Explain what is the difference between mutexes and semaphores?• A mutex object enables one thread into a controlled section, forcing other threads which tries to gain access to that section to wait until the first thread has movedout from that section •Semaphore allowsmultiple access to sharedresources•Mutex will always have a known owner •While for semaphore youwon’t know which threadwe are blocking on•Mutex is also a tool that is used to provide deadlock-free mutual exclusion (eitherconsumer or producer can have the keyand proceed with their work) •Semaphore is asynchronization tool toovercome the criticalsection problem•Mutexes by definition are binary semaphores, so there are two states locked or unlocked •Semaphores are usually referred to counted locks17) When one must use recursion function? Mention what happens when recursion functions are declared inline?Recursion function can be used when you are aware of the number of recursive calls is not excessive. Inline functions property says whenever it will called, it will copy the complete definition of that function. Recursive function declared as inline creates the burden on the compilers execution.18) Explain whether we can use semaphore or mutex or spinlock in interrupt context in Linux Kernel?Semaphore or Mutex cannot be used for interrupt context in Linux Kernel. While spinlocks can be used for locking in interrupt context.Guru99 Provides FREE ONLINE TUTORIAL on Various courses likeSelenium CCNA AngularJS NodeJS PLSQL。
单片机设计体参考文献
单片机设计体参考文献介绍单片机(Microcontroller)是一种集成了微处理器核心、存储器、输入/输出端口以及其他功能模块的集成电路芯片。
它具有低功耗、体积小、易于控制和使用的特点,广泛应用于各种电子设备中。
在单片机的设计过程中,参考文献的重要性不言而喻。
好的参考文献可以为设计者提供丰富的知识和经验,指导设计过程并解决问题。
本文将就单片机设计方面的参考文献进行全面、详细、完整和深入的探讨,为读者提供有关单片机设计的一些建议和指导。
选择合适的参考文献选择合适的参考文献是进行单片机设计的第一步。
以下是一些有关单片机设计的经典参考书目,供读者参考。
1. 《The 8051 Microcontroller and Embedded Systems Using Assembly and C》•作者:Muhammad Ali Mazidi, Janice Gillispie Mazidi, Rolin D.McKinlay•出版年份:2007年•内容简介:本书全面介绍了8051单片机的架构、编程和应用。
书中涵盖了从基本知识到高级应用的内容,适合初学者和有一定经验的读者。
2. 《ARM Cortex-M3和Cortex-M4单片机高级编程》•作者:Yifeng Zhu•出版年份:2013年•内容简介:本书详细介绍了ARM Cortex-M3和Cortex-M4单片机的架构、指令集和编程技巧。
作者通过丰富的实例和案例,深入浅出地讲解了单片机的高级编程技术。
3. 《单片机与嵌入式系统应用》•作者:Ryan Heffernan, Muhammad Ali Mazidi, Danny Causey•出版年份:2012年•内容简介:本书介绍了单片机和嵌入式系统的基本概念和原理,包括硬件和软件的设计和开发。
书中还提供了大量的实例和项目,帮助读者将理论知识应用到实际项目中。
单片机设计流程在进行单片机设计时,遵循一定的设计流程是非常重要的。
单片机原理英语作文

单片机原理英语作文Title: Understanding the Principles of Microcontrollers。
Microcontrollers, also known as MCU or microcontroller units, are compact integrated circuits designed to control specific operations within embedded systems. These systems range from simple household appliances to complexindustrial machinery. Understanding the principles behind microcontrollers is crucial for anyone involved in electronics or embedded systems development.Introduction to Microcontrollers:Microcontrollers consist of a central processing unit (CPU), memory (both volatile and non-volatile),input/output (I/O) ports, and various peripherals, all integrated into a single chip. The CPU executesinstructions stored in memory and interacts with the peripherals to carry out specific tasks.Basic Architecture:The architecture of a microcontroller typically includes:CPU Core: This is the heart of the microcontroller, responsible for executing instructions and performing calculations.Memory: Microcontrollers have both volatile (RAM) and non-volatile (ROM, Flash) memory. RAM is used for data storage during program execution, while ROM or Flash memory stores the program code permanently.Peripherals: These are additional features integrated into the microcontroller, such as timers, communication interfaces (UART, SPI, I2C), analog-to-digital converters (ADC), and digital-to-analog converters (DAC). Peripherals enable the microcontroller to interface with the external world and perform a wide range of tasks.I/O Ports: These ports allow the microcontroller tocommunicate with external devices or sensors. They can be configured as inputs or outputs depending on theapplication requirements.Programming Microcontrollers:Microcontrollers are programmed using low-level languages like assembly language or high-level languages like C or C++. Assembly language provides direct control over the microcontroller's hardware, making it suitable for tasks requiring precise timing or resource optimization. High-level languages offer greater abstraction and ease of programming, making them preferred for most applications.Key Concepts:Interrupts: Microcontrollers use interrupts to handle external events or prioritize tasks. When an interrupt occurs, the CPU temporarily suspends its current task to execute the interrupt service routine (ISR) associated with the interrupt source.Clock Systems: Clock signals synchronize the operations of various components within the microcontroller. Clock sources may include internal oscillators or external crystals, and the clock frequency affects the execution speed of the microcontroller.Power Management: Microcontrollers often include features for power management, such as sleep modes or low-power operation, to conserve energy in battery-powered applications.Embedded Systems Design: Understanding microcontroller principles is essential for designing embedded systems. Engineers must consider factors such as power consumption, processing speed, memory requirements, and peripheral compatibility when selecting a microcontroller for a specific application.Applications of Microcontrollers:Microcontrollers are ubiquitous in modern technology and find applications in diverse fields, including:Consumer electronics: Remote controls, smart home devices, and wearable technology.Automotive: Engine control units (ECUs), dashboard displays, and driver-assistance systems.Industrial automation: Programmable logic controllers (PLCs), motor control, and process monitoring.Medical devices: Patient monitoring systems, infusion pumps, and diagnostic equipment.Conclusion:In conclusion, microcontrollers play a vital role in modern electronics and embedded systems. Understanding the principles of microcontroller architecture, programming, and key concepts such as interrupts and power management is essential for engineers and developers working in this field. With their versatility and compact design,microcontrollers continue to drive innovation across various industries, shaping the future of technology.。
MSP430 单片机基础知识说明书

MSP430Microcontroller BasicsMSP430Microcontroller Basics John H.DaviesAMSTERDAM•BOSTON•HEIDELBERG•LONDONNEW YORK•OXFORD•PARIS•SAN DIEGOSAN FRANCISCO•SINGAPORE•SYDNEY•TOKYONewnes is an imprint of ElsevierNewnes is an imprint of Elsevier30Corporate Drive,Suite400,Burlington,MA01803,USALinacre House,Jordan Hill,Oxford OX28DP,UKCopyright©2008,Elsevier Ltd.All rights reserved.No part of this publication may be reproduced,stored in a retrieval system,or transmitted in any formor by any means,electronic,mechanical,photocopying,recording,or otherwise,without the prior written permission of the publisher.Permissions may be sought directly from Elsevier’s Science&Technology Rights Department in Oxford, UK:phone:(+44)1865843830,fax:(+44)1865853333,E-mail:************************.You may also complete your request online via the Elsevier homepage()by selecting “Support&Contact”then“Copyright and Permission”and then“Obtaining Permissions.”Recognizing the importance of preserving what has been written,Elsevier prints itsbooks on acid-free paper whenever possible.Library of Congress Cataloging-in-Publication DataApplication submittedBritish Library Cataloguing-in-Publication DataA catalogue record for this book is available from the British Library.ISBN:978-0-7506-8276-3For information on all Newnes publications,visit our Web site at:08091011121310987654321Printed in the United States of America“To Elizabeth.”ContentsPreface (xi)Chapter1:Embedded Electronic Systems and Microcontrollers (1)1.1What(and Where)Are Embedded Systems? (1)1.2Approaches to Embedded Systems (2)1.3Small Microcontrollers (5)1.4Anatomy of a Typical Small Microcontroller (8)1.5Memory (11)1.6Software (15)1.7Where Does the MSP430Fit? (16)Chapter2:The Texas Instruments MSP430 (21)2.1The Outside View—Pin-Out (21)2.2The Inside View—Functional Block Diagram (24)2.3Memory (25)2.4Central Processing Unit (30)2.5Memory-Mapped Input and Output (32)2.6Clock Generator (33)2.7Exceptions:Interrupts and Resets (36)2.8Where to Find Further Information (37)Chapter3:Development (43)3.1Development Environment (44)3.2The C Programming Language (46)3.3Assembly Language (55)3.4Access to the Microcontroller for Programming and Debugging (57)3.5Demonstration Boards (59)3.6Hardware (64)3.7Equipment (65)viii ContentsChapter4:A Simple Tour of the MSP430 (67)4.1First Program on a Conventional Desktop Computer (68)4.2Light LEDs in C (70)4.3Light LEDs in Assembly Language (72)4.4Read Input from a Switch (80)4.5Automatic Control:Flashing Light by Software Delay (91)4.6Automatic Control:Use of Subroutines (99)4.7Automatic Control:Flashing Light by Polling Timer_A (105)4.8Header Files and Issues Brushed under the Carpet (114)Chapter5:Architecture of the MSP430Processor (119)5.1Central Processing Unit (119)5.2Addressing Modes (125)5.3Constant Generator and Emulated Instructions (131)5.4Instruction Set (132)5.5Examples (146)5.6Reflections on the CPU and Instruction Set (153)5.7Resets (157)5.8Clock System (163)Chapter6:Functions,Interrupts,and Low-Power Modes (177)6.1Functions and Subroutines (178)6.2What Happens when a Subroutine Is Called? (178)6.3Storage for Local Variables (179)6.4Passing Parameters to a Subroutine and Returning a Result (183)6.5Mixing C and Assembly Language (185)6.6Interrupts (186)6.7What Happens when an Interrupt Is Requested? (188)6.8Interrupt Service Routines (190)6.9Issues Associated with Interrupts (196)6.10Low-Power Modes of Operation (198)Chapter7:Digital Input,Output,and Displays (207)7.1Digital Input and Output:Parallel Ports (208)7.2Digital Inputs (216)7.3Switch Debounce (225)7.4Digital Outputs (238)7.5Interface between3V and5V Systems (243)7.6Driving Heavier Loads (247)7.7Liquid Crystal Displays (252)7.8Driving an LCD from an MSP430x4xx (256)7.9Simple Applications of the LCD (264)Contents ix Chapter8:Timers (275)8.1Watchdog Timer (276)8.2Basic Timer1 (281)8.3Timer_A (287)8.4Measurement in the Capture Mode (300)8.5Output in the Continuous Mode (318)8.6Output in the Up Mode:Edge-Aligned Pulse-Width Modulation (330)8.7Output in the Up/Down Mode:Centered Pulse-Width Modulation (349)8.8Operation of Timer_A in the Sampling Mode (352)8.9Timer_B (353)8.10What Timer Where? (356)8.11Setting the Real-Time Clock:State Machines (357)Chapter9:Mixed-Signal Systems:Analog Input and Output (369)9.1Comparator_A (371)9.2Analog-to-Digital Conversion:General Issues (393)9.3Analog-to-Digital Conversion:Successive Approximation (402)9.4The ADC10Successive-Approximation ADC (407)9.5Basic Operation of the ADC10 (412)9.6More Advanced Operation of the ADC10 (424)9.7The ADC12Successive-Approximation ADC (432)9.8Analog-to-Digital Conversion:Sigma–Delta (438)9.9The SD16_A Sigma–Delta ADC (446)9.10Operation of SD16_A (459)9.11Signal Conditioning and Operational Amplifiers (475)9.12Digital-to-Analog Conversion (485)Chapter10:Communication (493)10.1Communication Peripherals in the MSP430 (495)10.2Serial Peripheral Interface (497)10.3SPI with the USI (504)10.4SPI with the USCI (513)10.5A Thermometer Using SPI in Mode3with the F2013as Master (520)10.6A Thermometer Using SPI in Mode0with the FG4618as Master (526)10.7Inter-integrated Circuit Bus (534)10.8A Simple I²C Master with the USCI_B0on a FG4618 (542)10.9A Simple I²C Slave with the USI on a F2013 (549)10.10State Machines for I²C Communication (559)10.11A Thermometer Using I²C with the F2013as Master (567)10.12Asynchronous Serial Communication (574)10.13Asynchronous Communication with the USCI_A (581)x Contents10.14A Software UART Using Timer_A (590)10.15Other Types of Communication (599)Chapter11:The Future:MSP430X (601)11.1Architecture of the MSP430X (601)11.2Instruction Set of the MSP430X (607)11.3Where Next? (614)11.4Conclusion (617)Appendix A:Kickstarting the MSP430 (619)A.1Introduction to EW430 (619)A.2Developing a Project in C (621)A.3Debugging with the Simulator (627)A.4Debugging with the Emulator (630)A.5Developing a Project in Assembly Language (633)A.6Tips for Using EW430 (636)A.7Tips for Specific Development Kits (640)Appendix B:Further Reading (645)Books and Articles (645)Newsletters,Magazines,and Journals (651)Index (655)Preface About a decade ago,I took over the teaching of afirst-year,second-semester course on digital electronics.It coveredflip-flops,counters,and state machines,all built fromsmall-scale integrated circuits.One of the projects at the end was to build a digital die.In many ways it was an excellent exercise because there were so many feasible ways in which it could be approached—simple counters,Johnson counters,or state machines.My concern was that it was very close to the project that I had experienced in myfirst course on digital electronics,which was back in the mid-1970s.The technology was close to the state of the art then,but was it still appropriate after so many years?Another feature of our course is that it is taken not only by electronic engineers but also by students from the science faculty,mostly computer scientists.I wanted these students to leave with a feeling for what can readily be done with modern programmable electronics insmaller-scale systems.I therefore replaced the material in the second half of the course with microcontrollers.(Do not worry,state machines were not abandoned—they are taught with hardware description languages in the context of programmable logic devices.) More recently,I thought that the time had come to review the choice of microcontroller. We traditionally used8-bit processors because modern devices have versatile peripherals and sophisticated embedded emulation and are quite powerful enough for most applications.Then the Texas Instruments MSP430caught my eye.A problem with8-bit microcontrollers is that8bits are too few for addresses,which are typically16bits long, and this means that data and addresses cannot be treated on an equal footing.In contrast, the MSP430has a uniform,16-bit architecture throughout:The address bus,data bus,and registers in the CPU are all16bits wide.The CPU has a modern design with plenty of registers,most of which can be used equally for data or addresses.It has a small instruction set with orthogonal addressing and an ingenious constant generator,which is used to emulate many operations that would otherwise need their own,distinct instructions.In many ways these features make the16-bit MSP430simpler than a typical8-bit processor.xii PrefaceOf course an elegant architecture does not generate many sales in the real world.More important are the range of peripherals and development tools.The MSP430offers the usual selection of peripherals plus some less common modules,including sigma–delta analog-to-digital converters and operational amplifiers.Some devices include hardware multipliers and digital-to-analog converters,which provide a complete signal chain(although,of course,Texas Instruments also offers an enormous range of digital signal processors).There is a choice of two free development environments(always an important considerationin education).One is IAR Embedded Workbench,which is available for a wide range of microcontrollers.Another,Code Composer Essentials,is produced by Texas Instruments itself.A third option is the GCC toolchain for MSP430at .I have not yet mentioned the major selling point of the MSP430,which is its low power consumption.Many microcontrollers are based on long-established designs withlow-power modes grafted onto them.This means that returning to full power from alow-power mode is often awkward and in some cases is virtually a reset operation.The MSP430is refreshingly different because it was designed from the outset for low-power operation.Entry to low-power modes and exit from them is straightforward,supported by a versatile clock system.For example,the clock module includes a digitally controlled oscillator that restarts at full speed from a low-power mode in less than1s in newer devices.In many applications the MSP430is put into a low-power mode,from which it is awakened by interrupts.These automatically restore full power for the interrupt service routine and return the processor to low power when it hasfinished.No extra code is needed for this:It is an intrinsic part of the interrupt mechanism.Most peripherals are designed for low power,although this can sometimes make them a little more complicated than would otherwise be necessary.The main point is that low-power modes are easy to use.The quality of the data sheets and user’s guides is another issue in education and those for the MSP430arefine.Unfortunately one item was missing in the area of documentation:a suitable textbook in English.I wrote this book tofill the gap.OutlineMost textbooks on microcontrollers follow one of two approaches.Thefirst is to present a sequence of projects to explore successive aspects of the device.I think that this works well for simpler architectures,notably the8-bit PICs,because it enables the reader to write functioning programs rapidly.This always feels good.Unfortunately I am not sure that it works as well for more advanced peripherals,which need considerable explanation before the reader can learn to use them fully.Preface xiii The alternative approach is to describe each module in the microcontroller fully and in turn,starting with the CPU and instruction set and working out to the peripherals.This makes for a well-organized reference book but can be tedious as a textbook.I tried to steer a course between these two.My inspiration is Kernighan and Ritchie’s The C Programming Language,which starts with a“Tutorial Introduction”before exploring the language systematically in subsequent chapters.I think that it takes rather more introduction to a microcontroller so the“simple tour,”which is my equivalent to the tutorial,does not start until Chapter4.Before that,thefirst chapter contains a general introduction to embedded systems and microcontrollers.This sets the scene for Chapter2, which focuses on the MSP430and gives a broad view of its features.I include a chapter on hardware and software for developing applications,which I hope will be particularly useful for readers who are new to microcontrollers.It also contains some reminders of features of the C language that are more prominent in programs for microcontrollers than desktop computers—bitfields for instance.This leads into the tour,which runs through some simple programs to illustrate input and output,the inevitableflashing LEDs,and an introduction to one of the timers(the MSP430has several).The remainder of the book provides a more systematic description of the MSP430.I start with the CPU and instruction set,and show how the constant generator is used to provide further“emulated”instructions.The clock system is also described in this chapter.It is followed by Chapter6on subroutines,interrupts,and low-power modes.I already mentioned that a major feature of the MSP430is the way in which low-power modes are handled automatically when interrupts are serviced.Subsequent chapters are concerned with the most widely used peripherals.Chapter7on digital input and output starts with the usual parallel ports and goes on to describe liquid crystal displays,which many MSP430s can drive directly.There is a wide selection of timers in the MSP430,which are covered in the next chapter.This is followed by a lengthy chapter on analog input and output.The MSP430offers many peripherals for analog-to-digital conversion,ranging from a simple comparator to a16-bit sigma–delta module.I do not think that you can use any of these without some understanding of their characteristics,which explains the length of this chapter.Some MSP430s include operational amplifiers and digital-to-analog converters,which I described briefly.Thefinal long chapter is on communication.I cover only three types of communication—serial peripheral interface,inter-integrated circuit bus,and asynchronous—but there are several peripherals for these in different variants of the MSP430,so there is a lot to explain.xiv PrefaceThe very last chapter provides an introduction to the MSP430X,an extended architecture with a20-bit address bus that can handle1MB of memory.There is also an appendix to take the reader through the steps of editing,building,and debugging thefirst project, which can sometimes be a frustrating experience.Ifind it annoying when books contain large chunks copied directly from data sheets and have tried to avoid this.You cannot hope to program a microcontroller without the data sheet at your side.Having said that,I start by going through each bit of the registers that control the peripherals used for the early programs.The idea is to explain how a typical peripheral is configured.After that I become more selective and concentrate on the overall function of the peripheral ually I pick out a few details that I think need extra explanation but skip the more mundane aspects.They are in the example programs inany case.I include links to many of Texas Instruments’application notes because I can see no point in repeating material that has been thoroughly explained already.Ifind that many students are strangely reluctant to use this valuable resource.There are a few reminders about code examples for the same reason.C or Assembly Language?Most small microcontrollers are now programmed using the C language so the question might seem redundant.In fact often columns in newletters on embedded systems often carry articles with titles such as“Is Assembly Language Dead?”However,the answer seems to be clearly that assembly language is not dead for small microcontrollers,such as the MSP430.Most code is written in C but you may occasionally need to write a subroutine in assembly language to perform an operation that cannot be written out directly in C.Two examples are operations that require bitwise rotations rather than shifts and calculations that can be done more efficiently by exploiting special instructions of the CPU,such as binary-coded decimal arithmetic.Intrinsic functions often avoid the need for assembly language but not always.More important,assembly language is often needed for debugging and this is the most compelling reason for describing it in a textbook.Small microcontrollers typically spend much of their time interacting with hardware by manipulating the registers that control the peripherals.Debugging may require stepping through lines of assembly language to check each step.You have to look at the manual to check the details of each instruction,but it helps to have a general idea of how the assembly language works.Preface xv From a pedagogical point of view,assembly language is useful to illustrate the architecture of the processor.In fact the MSP430is simple enough that you can explore the thinking behind the design of the instruction set.Besides,assembly language can be fun(in small doses).My approach is to develop thefirst,simple programs in Chapter4using both C and assembly language to show the relation between them.However,C dominates by the end of the chapter.Assembly language makes a strong showing in the next two chapters,which cover architecture,subroutines,and interrupts,including a section on mixing C and assembly language.Almost all remaining programs are in C,with assembly language reappearing only briefly for a function to convert numbers to binary-coded decimal.The listings in the text are read directly from the programs that I tested.Companion Web SitePlease visit the companion Web site for this book at/companions/9780750682763and download the programs used as examples in the book.These programs were read into the text of the book from the workspaces that I used for testing,which means that the downloadedfiles should match the book perfectly.Links are also provided for data sheets,user’s guides,and development tools.Solutions to the odd-numbered examples are freely available on the companion Web site but the remaining solutions are offered only to instructors. AcknowledgmentsIt is a pleasure to thank numerous people who have helped me in various ways to write this book.Many are from Texas Instruments:Bonnie Baker,Jacob Borgeson,Andreas Dannenberg,Colin Garlick,Thomas Mitnacht,and Robert Owen.I am particularly grateful to Adrian Valenzuela for his comments on thefinal draft.Several engineers from other companies were kind enough to provide advice and assistance:Edward Gibbins and Steve Duckworth from IAR,Tom Baugh of SoftBaugh,Paul Curtis of Rowley Associates,David Dyer of Ericsson and Fernando Rodriguez while he was at Texas Instruments.Finally,I am grateful to colleagues and students at Glasgow University,from whom I have learnt an enormous amount over the years.I’d like to thank Fernando Rodriguez(not the same person who was at Texas Instruments)and David Muir in particular,with both of whom I have run a wide range of projects on embedded systems and microcontrollers—from tutor boxes withflip-flops to the electronic systems of a Formula Student racing car.John Davies,Milngavie。
单片机英语词汇

单片机英语词汇Microcontroller English VocabularyIntroductionIn the field of electronics and embedded systems, microcontrollers play a vital role. Whether it's in consumer electronics, industrial automation, or Internet of Things (IoT) devices, microcontrollers are extensively used for controlling and monitoring various applications. This article aims to provide an overview of commonly used English vocabulary related to microcontrollers.1. MicrocontrollerA microcontroller is a miniature computer system on a single integrated circuit (IC). It consists of a central processing unit (CPU), memory, and input/output peripherals. Microcontrollers are designed for specific tasks and typically used in embedded systems where they control and interact with other electronic components.2. Embedded SystemAn embedded system is a combination of hardware and software designed for a specific function. It is integrated into a larger system and performs dedicated tasks. Microcontrollers are often at the heart of embedded systems, providing the intelligence and control required for the system to function.3. PeripheralA peripheral refers to an external device connected to a microcontroller. It allows the microcontroller to interact with the outside world, such as sensors, actuators, displays, and communication interfaces. Examples of peripherals include analog-to-digital converters (ADC), digital-to-analog converters (DAC), UART (Universal Asynchronous Receiver/Transmitter), and GPIO (General Purpose Input/Output) pins.4. InterruptAn interrupt is a signal generated by a peripheral or internal event that momentarily suspends the normal execution of the program. Interrupts allow critical tasks to be handled immediately, ensuring real-time responsiveness. Common types of interrupts include timer interrupts, external interrupts, and communication interrupts.5. FirmwareFirmware refers to software that is permanently stored on a microcontroller's memory and provides low-level control over its hardware peripherals. It is responsible for initializing the microcontroller, managing peripherals, and implementing specific functionalities. Firmware is typically written in assembly language or a high-level programming language like C.6. BitA bit, short for binary digit, is the smallest unit of digital information. It can represent either a 0 or a 1. Microcontrollers internally process data in terms of individual bits, allowing for precise control over binary operations. Bits are combined to form bytes, which are commonly used for data storage and manipulation.7. OscillatorAn oscillator generates a stable and accurate clock signal that provides timing for various operations within a microcontroller. The clock signal determines the speed at which the microcontroller executes instructions and controls the timing of data transfer. Common types of oscillators include crystal oscillators and ceramic resonators.8. Interrupt Service Routine (ISR)An Interrupt Service Routine (ISR) is a specific section of code that is executed when an interrupt occurs. It is responsible for handling the interrupt event and performing necessary actions. ISRs are typically written to respond to specific interrupt sources and can be customized based on the application's requirements.9. Serial CommunicationSerial communication is the process of transmitting data one bit at a time over a single data line. It is commonly used for communication between microcontrollers, sensors, and other peripherals. Serial communication protocols such as UART, SPI (Serial Peripheral Interface), and I2C (Inter-Integrated Circuit) are widely used in microcontroller-based systems.10. Real-Time Operating System (RTOS)A Real-Time Operating System (RTOS) is a specialized operating system designed for applications that require precise timing and responsiveness. RTOS provides task scheduling, resource management, and communication mechanisms tailored for real-time systems. It allows forconcurrent execution of multiple tasks and ensures critical tasks meet their timing deadlines.ConclusionIn conclusion, a thorough understanding of microcontroller-related English vocabulary is essential for professionals and enthusiasts working in the field of electronics and embedded systems. This article has provided a concise overview of key terms related to microcontrollers. By familiarizing yourself with these terms, you will be better equipped to communicate and comprehend technical documentation, participate in discussions, and deepen your knowledge in this exciting domain.。
全球30个最经典的嵌入式(单片机、MCU)资源网站

全球30个最经典的嵌入式(单片机、MCU)资源网站1.STM32&STM8技术社区,有非常详细ST官方的的MCU资料,5、6年下来论坛也积累了许多工程师自己写的东西,除了代码、例程、尤其是工程师自己的使用经验,入门和深度开发都能找到自己需要的。
社区视频、方案、论坛、资料栏目很不错。
资料均可站内搜索,用起来很方便/ -中文2. EG3 关于嵌入式开发的站点,提供非常多关于嵌入式开发的资料。
包括开发公司,技术文档,免费资源等等。
版面包括busses & boards,embedded software,dsp,embedded systems,open source,rtos,embedded chips,system-on-a-chip 等等。
强烈推荐http://www.eg/全球30个最经典的嵌入式(单片机、MCU)资源网站.pdf- 外文3. Programmers Heaven - Assembler programming zone 大量的源代码,分类清晰,强烈推荐。
但是有很多好像已经不再更新了。
/zone5/index.htm - 外文4. The First Stop for the Latest ICs and Components 非常好的关于微处理器,DSP,可以编程控制器资讯的网站,更新非常快。
强烈推荐一些领导级别的人常去,了解行业动态!/ - 外文5. 飞思卡尔技术社区,这是飞思卡尔的中文交流地方,我最喜欢的是里面飞思卡尔FAE,他们一直在论坛活跃,做视频、发帖子指导飞思卡尔单片机。
/bbs/ -中文6. PJRC Site Map 这是一个人网站,里面的东西很久没有更新了。
但是里面的东西非常不错,我常常打开它,希望站长给点新东西。
不过,不管怎样,这是一个非常优秀的网站,很少个人站点能做的这么清晰,简洁。
里面的资源非常不错。
1,MP3 Player With IDE Hard Drive 2 8051 Microcontroller Goodies (free stuff) 3.The MIDI Drum Machine 4,CCD Array Reader 5,Audio Amplifier Design for the OSU IEEE CBW 5,Xilinx Programming ,6 Fourth Order Low-Pass Filter IC 作为一个51开发者,不看这里,是一个大损失。
30个电气专业英语词汇互译
30个电气专业英语词汇互译Electrical engineering is a highly specialized field that utilizes a unique set of terminology and vocabulary to describe various concepts, components, and processes. As the industry continues to evolve and expand globally, the need for effective communication and translation of these specialized terms becomes increasingly important. In this essay, we will explore 30 essential electrical engineering English words and provide their corresponding translations.1. Voltage - Voltage is the potential difference between two points in an electrical circuit, measured in volts (V). The French translation is "tension électrique."2. Current - Current refers to the flow of electric charge through a conductor, measured in amperes (A). The Spanish translation is "corriente eléctrica."3. Resistance - Resistance is the measure of the opposition to the flow of electric current in a circuit, measured in ohms (Ω). TheGerman translation is "Widerstand."4. Power - Power is the rate at which electrical energy is generated or consumed, measured in watts (W). The Italian translation is "potenza."5. Capacitance - Capacitance is the ability of a component to store an electric charge, measured in farads (F). The Chinese translation is "电容量."6. Inductance - Inductance is the property of a component that opposes changes in the electric current, measured in henries (H). The Japanese translation is "インダクタンス."7. Impedance - Impedance is the total opposition to the flow of alternating current in a circuit, meas ured in ohms (Ω). The Russian translation is "сопротивление."8. Frequency - Frequency is the number of cycles or oscillations that occur in a unit of time, measured in hertz (Hz). The Arabic translation is "ددرتلا."9. Semiconductor - A semiconductor is a material that can conduct electricity under certain conditions, such as silicon (Si) or germanium (Ge). The Korean translation is "반도체."10. Transistor - A transistor is a semiconductor device used to amplify or switch electronic signals and electrical power. The Portuguese translation is "transistor."11. Diode - A diode is a semiconductor device that allows electric current to flow in only one direction. The Polish translation is "dioda."12. Resistor - A resistor is a passive electronic component used to control or limit the flow of electric current. The Greek translation is "αντίσταση."13. Capacitor - A capacitor is a passive electronic component used to store electric charge temporarily. The Hindi translation is "सससससस."14. Inductor - An inductor is a passive electronic component used to store energy in the form of a magnetic field. The Swedish translation is "induktor."15. Transformer - A transformer is a device used to convert alternating current (AC) from one voltage level to another. The Dutch translation is "transformator."16. Circuit - A circuit is a closed path through which electric currentcan flow. The Turkish translation is "devre."17. Relay - A relay is an electrically operated switch used to control a high-power circuit with a low-power signal. The Persian translation is "هلر."18. Rectifier - A rectifier is a circuit that converts alternating current (AC) to direct current (DC). The Urdu translation is "سوکعمهدننک."19. Amplifier - An amplifier is a device that increases the magnitude of a signal. The Thai translation is "ससससससस."20. Oscillator - An oscillator is a circuit that generates a repetitive electrical signal. The Vietnamese translation is "Máy dao động." 21. Sensor - A sensor is a device that detects and responds to a physical or chemical stimulus. The Romanian translation is "senzor."22. Encoder - An encoder is a device that converts information from one format or code to another. The Hungarian translation is"kódoló."23. Decoder - A decoder is a device that converts encoded information back into its original format. The Czech translation is "dekodér."24. Multiplexer - A multiplexer is a device that selects one of several input signals and forwards it to a single output. The Slovak translation is "multiplexor."25. Demultiplexer - A demultiplexer is a device that selects one of several outputs based on a control signal. The Malay translation is "pemultipleks."26. Microcontroller - A microcontroller is a single-chip computer used for automation and embedded systems. The Indonesian translation is "mikrokontroler."27. Microprocessor - A microprocessor is a central processing unit (CPU) on a single integrated circuit. The Finnish translation is "mikroprosessori."28. Analog-to-Digital Converter (ADC) - An ADC is a device that converts an analog signal into a digital signal. The Norwegian translation is "analog-til-digital-omformer."29. Digital-to-Analog Converter (DAC) - A DAC is a device that converts a digital signal into an analog signal. The Danish translation is "digital-til-analog-omformer."30. Printed Circuit Board (PCB) - A PCB is a board that mechanically supports and electrically connects electronic components using conductive tracks. The Swedish translation is "trycktkretsförskjutning."The translations provided in this essay demonstrate the diversity of the electrical engineering field and the need for effective communication across different languages and cultures. As the industry continues to evolve and become more globalized, the importance of understanding and translating these specialized terms will only become more crucial. By familiarizing ourselves with these 30 key electrical engineering words and their multilingual equivalents, we can enhance collaboration, facilitate knowledge sharing, and ensure the seamless exchange of technical information worldwide.。
电子存包柜- 英文资料
Design of electronic storage cabinet based on RTOSSmallDepartment of electronics and communication engineering, PSG college, Coimbatore IndiaAbstract:This paper introduces the design principle of the electronic storage control system based on RTOS Small, and introduces the system used in this system to make the controller, which can manage the N storage cabinet at the same time. The door lock is controlled by the electromagnetic valve, when customers need to save the package, can go to the lockers before press the "open" button, the microcontroller receives a pulse signal, and the system I/O port to send corresponding signals to control the electromagnetic valve lock door will be an empty box is opened, the customer can save the package and the door shut. When the customer needs to take the package, will as long as the bar code placed in front of the bar code reader, barcode reader bar code information collected by the output voltage signal corresponding to the microcontroller, the password system is relatively consistent, send out signals to the solenoid valve is open, the customer can remove the package.Key words:Small RTOS;electronic storage cabinet; save package1、IntroductionRTOS RAM Small demand for small, very suitable for such a relatively small resources of the system. RTOS has a multi tasking, strong real-time, and can be reduced to the kernel, making the design of real-time applications, expansion and maintenance easier. The introduction of the idea of RTOS, instead of the traditional software design method, so that it is no longer a single thread structure, through the application is divided into several independent tasks, RTOS makes the design process of application system is simplified. In this paper, the software design of electronic storage cabinet based on single chip microcomputer is combined, the design idea of RTOS Small and the application of message queue communication mechanism are briefly analyzed.1.1 basic principles of RTOS51 SmallRTOS51 Small is a very small kernel, fully integrated in the C51 KEIL compiler, only take less memory space, you can run in the 51 single chip microcomputer system without external data memory. The kernel is responsible for initializing and open, other tasks scheduling system, according to the priority of tasks, a reasonable distribution of CPU in different time between tasks, the kernel can generally provide task scheduling and interruptservice function. A program and a task, the task of each separate, independent implementation of the part called thread. All event driven and time driven are reflected in the settings of the corresponding task identification and thread identification. When the hardware environment, on the basis of the identification, by arranging the system interrupt and task scheduling algorithm adjust the response, by using the method of setting up environmental variables, which can interrupt exit after return to any more than one set of entrance in one to perform, and effectively solves the key problem of flexible switching of foreground and background tasks thread. RTOS Small 51 user tasks with a running state, ready state, wait and suspend, interrupt service program. At any moment, the state of the task is one of these four states. In order to save memory, create and delete mission OS dynamic, with the function OSSTART () to start a multi tasking environment, OS took all the tasks set up, and set them as the ready state, the highest priority task to run. Only when all the priority is higher than its task to wait. Ready to enter a state of operation. The scheduler will be the top priority of the task ready list as the next task to be performed.Task call os_wait function, pending the current task, waiting for one or several intervals (K_IVL), time out (K_TMO), signal (K_SIG) events. If waiting for event has occurred, continue to implement the current task; if waiting for events did not occur, the corresponding waiting sign, suspend the task to task switching program segment switch to the next task.Small RTOS51 (init) by performing a function to register initialization, call the function OSSTart () to initialize each task stack and perform the first task, and the choice of the first task for the reason that the task priority level. In the selection process to complete the task of scheduling.1.2 communication between tasksCommunication between tasks using the message queue, after 3 steps: to create a message queue OSQCreate (), to the message queue message OSQPost (), take message OSQPend (). Call the OSQPost () function to send the message, if you already have a task waiting for the message, immediately turn to wait for the news task, if the message queue is full, is unable to deliver the message, return an error. If the message queue is not full, but there is no other task waiting for the message, then. It is worth noting that, when the queue is full, the function does not suspend the current task, so call the function of the task should be judged to return the condition, if the message is full, it should be hung from the current task. When receiving a message, if the message queue is empty, the task of taking the message will be suspended until a message is received in the message queue.2. Application examples2.1Hardware platformFor example, the system block diagram is as follows.The electronic storage cabinet can control the maximum number of goods storage box is 32, divided into about 16 boxes, the picture only draw 16 road control. Control chip using AT89C55 microcontroller, with real-time clock module, bar code reader, liquid crystal display module, thermal printer composition, designed to three PCB board.1 master control board, the user's storage and access to the user interface, save the package password, display the user access to the password in the process of the password input and the state of all 32.The 2 door control panel is composed of three parts, the first part of the box is detected, including 16 infrared detection input, 16 way infrared emission control drive. The second part of the 16 road relay control box is controlled by 16 small DC motor constitute open 16 box control. In the third part, the status of the box door is detected, and the opening / closing of the 16 boxes is detected.3 access package barcode printing, voice prompt, the whole system is composed of4 single chip with the MCU control work, operation management package users and record the history parameters, then sends commands to the microcontroller the distribution of empty container and print out the package, to the user.2.2 software designThe electronic storage cabinet mainly comprises a key processing module, a display processing module and a communication processing module. Therefore, the task can be divided into key display, receive data, command processing, sending data and other 4 tasks.The microcontroller receives the user according to the package to enter a password, password and key processing, display box display, send out commands for example, illustrate the main design idea.After the system initialization, the article uses function OSSTart () to set up a multi task environment, set up the task stack for each task, and successfully set up 4 tasks, waiting for the wake of the corresponding task. Users only need to define functions they want to achieve for the mission, declared in the Config.h task function name and its priority, and the number of their code can be, no traditional programming under the kind of general relations, the system will automatically run the code. RTOS51 Smal transplantation is mainly configured OS-CPU.H, OS_CFG.H and CONFIG.H three files, where the OS_CFG.H file is mainly used for the operating system and the reduction of the clock and other related configuration.Define 4 tasks in the CONFIG.h file.#ifnedf............#endifLimited to the length of the single chip microcomputer to send and receive data procedures.3. SummaryThe real-time multi task operating system makes programming more efficient, maintenance and modification more convenient, so it is widely used at present, especially in the embedded system. At the low end of the 51 single chip application, the use of real-time multi tasking operating system, using RTOS Small multi tasking platform for system application design and improvement, also has practical significance.In this paper, the innovation points: the idea of RTOS Small multi task application in a specific single chip microcomputer control electronic storage cabinet system software design, the message queue based on the task of communication programming method.Reference:[1] Raj Kamal, Embedded Systems: Architecture,Programming And Design, 2008 edition, published by McGraw Hill Education Private Limited.[2] Mazidi Muhammed Ali, The 8051 Microcontroller AndEmbedded Systems Using Assembly And C, second edition, published by Pearson education.[3] Kenneth J. Ayala, The 8051 Microcontroller, 2004 edition.[4] Deepak Gupta EM Magazine, RFID Interface To 8051.[5]Adel S.Sedra and Kenneth.Smith[M]:Microelectronic Circuits,4rd ed,Oxford University Press.Inc,1998.20~58.[6]Adel S.Sedra and Kenneth.Smith[M]:Microelectronic Circuits,4rd ed,Oxford University Press.Inc,1998.31~98.[7]P.R.Gray and R.G.Meyer,Analysis and Design of Analog Integrated circuits 3rd Edition,John Wiley& Sons,New York,1993. 97~104.[8]Adel S.Sedra and Kenneth.Smith[M]:Microelectronic Circuits,4rd ed,Oxford University Press.Inc,1998.20~58.[9] Proykova A. How to Improve a Random Number puter Physics Communications, 2000, 124: 125-131[10] Tsumoto, S.Extracing Structure of Medical Diagnosis[M] . Rough Set Approach , 2003 .。
单片机设计体参考文献

单片机设计体参考文献近年来,单片机在各个领域的应用越来越广泛,其设计和开发也日益受到重视。
本文将通过参考文献的方式,介绍一些关于单片机设计的经典文献,以帮助读者更好地了解单片机设计的基础知识和最新发展。
《The 8051 Microcontroller and Embedded Systems》是一本经典的单片机设计教材,作者为Muhammad Ali Mazidi、Janice Mazidi和Rolin D. McKinlay。
该书系统介绍了8051单片机的基本原理、结构和应用,深入浅出地解释了单片机的工作原理和编程技巧。
这本书通俗易懂,适合初学者入门,也适合进阶学习者深入理解单片机设计的原理和应用。
另一本经典的单片机设计书籍是《Embedded Systems: Introduction to Arm Cortex-M Microcontrollers》。
这本书由Jonathan Valvano撰写,详细介绍了Arm Cortex-M系列微控制器的设计原理和应用。
作者结合实际案例,生动形象地展示了如何利用Arm Cortex-M微控制器设计嵌入式系统,包括硬件设计、软件开发和调试技巧。
这本书内容丰富,适合有一定单片机基础的读者深入学习。
除了书籍外,一些经典的期刊论文也对单片机设计有重要的贡献。
例如《Design and Implementation of Automatic Solar Tracking System Using Single Axis Solar Panel》这篇论文,详细介绍了利用单片机设计自动太阳能跟踪系统的原理和方法。
通过该论文,读者可以了解到单片机在太阳能应用中的设计思路和实现技巧,对于研究太阳能利用技术的读者具有重要参考价值。
还有一些开源项目和实践经验也可以作为单片机设计的参考文献。
比如《Arduino Project Handbook: 25 Practical Projects to Get You Started》这本书,介绍了25个基于Arduino单片机的实用项目,涵盖了物联网、机器人、传感器等多个领域。
基于单片机原理的英文书籍
基于单片机原理的英文书籍
以下是一些关于基于单片机原理的英文书籍的推荐:
1. "The 8051 Microcontroller and Embedded Systems: Using Assembly and C" by Muhammad Ali Mazidi, Janice Gillispie Mazidi, and Rolin D. McKinlay
2. "Embedded C Programming and the Microchip PIC" by Richard H. Barnett, Sarah Cox, and Larry O'Cull
3. "Embedded Systems: Introduction to the MSP432 Microcontroller" by Jonathan W. Valvano
4. "ARM Microcontroller Interfacing: Hardware and Software" by Warwick
A. Smith
5. "Microcontrollers: From Assembly Language to C Using the PIC24 Family" by Robert B. Reese
这些书籍都是关于单片机原理和编程的经典著作,涵盖了不同的单片机型号和编程语言。
无论您是初学者还是有经验的开发者,这些书籍可以帮助您建立起对单片机的理解,并提供实际应用的代码示例和项目案例。
Embedded system【计算机相关外文翻译】

Embedded systemEmbedded systemembedded system is a computer system designed to perform one or a few An embedded systemembedded systemdedicated functions[1][2]often with real-time computing constraints. It is embedded as part of a complete device often including hardware and mechanical parts. By contrast, a general-purpose computer, such as a personal computer, is designed to be flexible and to meet a wide range of end-user needs. Embedded systems control many devices in common use today.[3]HistoryOne of the first recognizably modern embedded systems was the Apollo Guidance Computer, developed by Charles Stark Draper at the MIT Instrumentation Laboratory. At the project's inception, the Apollo guidance computer was considered the riskiest item in the Apollo project as it employed the then newly developed monolithic integrated circuits to reduce the size and weight. An early mass-produced embedded system was the Autonetics D-17 guidance computer for the Minuteman missile, released in 1961. It was built from transistor logic and had a hard disk for main memory. When the Minuteman II went into production in 1966, the D-17 was replaced with a new computer that was the first high-volume use of integrated circuits. This program alone reduced prices on quad nand gate ICs from $1000/each to $3/each, permitting their use in commercial products.Since these early applications in the 1960s, embedded systems have come down in price and there has been a dramatic rise in processing power and functionality. The first microprocessor for example, the Intel 4004, was designed for calculators and other small systems but still required many external memory and support chips. In 1978 National Engineering Manufacturers Association released a "standard" for programmable microcontrollers, including almost any computer-based controllers, such as single board computers, numerical, and event-based controllers.As the cost of microprocessors and microcontrollers fell it became feasible to replace expensive knob-based analog components such as potentiometers and variable capacitors with up/down buttons or knobs read out by a microprocessor even in some consumer products. By the mid-1980s, most of the common previously external system components had been integrated into the same chip as the processor and this modern form of the microcontroller allowed an even more widespread use, which by the end of the decade were the norm rather than the exception for almost all electronics devices.The integration of microcontrollers has further increased the applications for which embedded systems are used into areas where traditionally a computer would not have been considered. A general purpose and comparatively low-cost microcontroller may often be programmed to fulfill the same role as a large number of separate components. Although in this context an embedded system is usually more complex than a traditional solution, most of the complexity is contained within the microcontroller itself. Very few additional components may be needed and most of the design effort is in the software. The intangible nature of software makes it much easier to prototype and test new revisions compared with the design and construction of a new circuit not using an embedded processor.Characteristics1.Embedded systems are designed to do some specific task, rather thanbe a general-purpose computer for multiple tasks. Some also have real-time performance constraints that must be met, for reasons such as safety and usability; others may have low or no performance requirements, allowing the system hardware to be simplified toreduce costs.2.Embedded systems are not always standalone devices. Many embeddedsystems consist of small, computerized parts within a larger device that serves a more general purpose. For example, the Gibson Robot Guitar features an embedded system for tuning the strings, but the overall purpose of the Robot Guitar is, of course, to play music.[5] Similarly, an embedded system in an automobile provides a specific function as a subsystem of the car itself.3.The program instructions written for embedded systems are referredto as firmware, and are stored in read-only memory or Flash memory chips. They run with limited computer hardware resources: little memory, small or non-existent keyboard and/or screen.Processors in embedded systemsEmbedded processors can be broken into two broad categories: ordinary microprocessors (μP) and microcontrollers (μC), which have many more peripherals on chip, reducing cost and size. Contrasting to the personal computer and server markets, a fairly large number of basic CPU architectures are used; there are Von Neumann as well as various degrees of Harvard architectures, RISC as well as non-RISC and VLIW; word lengths vary from 4-bit to 64-bits and beyond (mainly in DSP processors) although the most typical remain 8/16-bit. Most architectures come in a largenumber of different variants and shapes, many of which are also manufactured by several different companies.A long but still not exhaustive list of common architectures are: 65816, 65C02, 68HC08, 68HC11, 68k, 8051, ARM, AVR, AVR32, Blackfin, C167, Coldfire, COP8, Cortus APS3, eZ8, eZ80, FR-V, H8, HT48, M16C, M32C, MIPS, MSP430, PIC, PowerPC, R8C, SHARC, ST6, SuperH, TLCS-47, TLCS-870, TLCS-900, Tricore, V850, x86, XE8000, Z80, AsAP etc.。
JTAG调试

JTAG仿真器原理调试的基础是检测,而检测有“无损(non-intrusive)”和“无损(intrusive)”之分。
理想的检测手段应该是不使被测对象的状态(包括时序)因此而造成任何改变,否则测到的数据就不准确了。
可是,严格意义上的无损检测不可能实现,因此实际上是“测不准”的。
人们所能做到的只是尽量减少对被测对象的状态改变,将误差减少到可以接受的程度。
这还是比较容易理解的。
不过原来看ARM资料的时候,调试手段一大堆,但是都没有深刻的印象,以致于以前还一直在怀疑,为什么下载的jflash-s3c2410,不能通过仿真器下载呢?现在想想,其实对于什么是调试器,什么是仿真器,调试的模型是什么都是非常模糊的,所以下决心首先从概念上理解调试模型。
之后随着技术深入,可以逐步深入理解调试技术。
现代调试技术大致可以归为指令级仿真调试和硬件仿真调试两种。
1 指令级仿真调试我想这个比较容易理解。
指令集仿真调试属于纯软件仿真,比如ARM公司的ARMulator。
因为有的时候嵌入式软件的开发需要在目标系统(硬件)并不存在的条件下进行,所以需要这种通过软件来模拟目标系统的CPU。
现在有个开源项目skyeye,也是这样一个指令级仿真调试工具。
这一系列的软件以数据结构来模拟目标机CPU中各个寄存器和其他资源,以及目标系统的有关资源(比如内存等),并且通过软件模拟,即逐条指令地解释执行目标机可执行映象中的程序。
例如,“mov r1, #0”,就代表往寄存器r1的数据结构中写0,如此。
模拟执行的速度当然慢一些,但是可以验证逻辑,在某些条件下是一种重要的手段。
2 硬件仿真调试现在比较成熟的技术有如下四种:·Ad-hoc test·Scan-based test·Build-in-self test·Boundary-scan test因为不是专业研究这个方向,对这四个测试技术的区别也没大有必要深究。
一种夜光数字高精度日历钟设计

• 169•本文介绍一种以STC15系列单片机为核心,配合外部的高精度时钟芯片DS1302和LCD12864液晶显示屏,设计一种具有可调节功能的夜光数字高精度日历钟。
经过实验测试,该方案设计的高精度日历钟运行稳定,内部硬件电路设计简单,具有很好的易用性和很高的市场价值。
1.引言传统的日历钟的设计是依赖于机械结构或以石英为振荡源原理设计的,这种时钟系统精度不够高,在一些特殊的场合可能出现不稳定的情况(陈炜,基于单片机的实时日历时钟的设计:科技经济导刊,2018)。
电子时钟通过利用电子技术将时钟设计数字化,摆脱内部机械控制机制,拥有时间精确、易于操作等特点,在一定程度上弥补了机械式时钟和以石英为振荡源时钟存在的不足之处。
其次,便携计时工具需要夜间可视,设计具有夜光功能的电子时钟,也是本设计特点(王香云,基于单片机的电子日历设计:太原师范学院学报(自然科学版),2014)。
一种夜光数字高精度日历钟设计安徽工程大学 黄昱凌 瞿成明 王凤随图2 电路原理图2.硬件电路设计2.1 设计方案系统主要含五个独立的子模块。
系统由主控制器模块、时钟模块、显示模块、按键模块、闹钟报警模块等各部分组成,系统的整体框图如图1所示。
主控芯片采用STC15F2K60S2型号的单片机作为系统主控芯片(Muhammad Ali Mazidi,Janice Gillispie,Rolin Mckinlay.The 8051 Microcontroller and Embedded Systems:Using Assembly and C,Seco n d E d i t i o n.P e a r s o n Education,2006)。
夜光显示器采用单色的液晶显示器LCD12864作为系统的显示模块。
LCD12864液晶显示器自身带有夜间发光特性,便于夜间观察,显示图案效果美观。
计时芯片采用DS1302实现高精度数字日历钟的设计(赵毅刚,单片机原理及应用:高等教育出版社,2016)。
JC文献综述100
本科毕业设计(文献综述)题目粮仓环境智能监测报警系统设计姓名陈超杰专业自动化学号 201242030 指导教师刘林阴郑州科技学院电气工程学院二○一六年二月粮仓环境智能监测报警系统设计文献综述引言1 课题研究背景及设计意义粮仓粮食的存储是否得当对国家经济正常合理的运行具有很大的影响。
但是在以前的经济和科技水平有限,所以粮食的存储的环境差,存在不同程度的粮食存储变质问题。
粮库管理的重点之一就是要合理布置测温点,经常检查温度变化,以便及时发现粮食的发热点,减少粮食的损失。
然而,大部分粮仓采用人工测量温湿度,工作人员工作量大而且效率低。
所以,粮食虫蛀、霉变的情况时有发生。
随着单片机和传感技术的迅速发展,自动检测领域发生了巨大变化,温室环境自动监测控制方面的研究有了明显的进展,并且必将以其优异的性能价格比,逐步取代传统的温湿度控制措施.本文参考了一种基于单片机并采用数字化单总线技术的温湿度度测控系统应用于粮库的的设计方案,根据实用者提出的问题进行了改进,提出了一种新的设计方案,在单总线上传输数字信号。
所以说,粮仓温湿度检测报警系统设计意义重大。
2 主要相关技术的应用2.1远程温湿度测控系统研究远程温湿度测控系统主要由温湿度采集器,温湿度测控平台,控制器,执行机构,远程通讯模块和控制中心软件等部分组成,系统采用了总线结构,模块化设计,各部分既可独立工作,又可联网工作,组建方便,并具有良好的扩充性。
智能型温湿度采集器采用国际上先进的温敏和湿敏元件,传递温湿度参数;温湿度测控平台内置微处理器,智能化设计,可独立工作又可方便组网,还可监测并管理各个温湿度测控器的工作,指令各相应机构,实现环境的检测和控制,同时,控制平台的通讯功能使其可作为下位机接受上位机和计算机的管理和控制,通过电力载波、电话线或通讯电缆等通讯手段可接入总体测控系统中心网络。
2.1.1结构组成(1)温湿度采集器(信号采集)(2)控制器(3)执行机构(4)测控平台(5)通讯(链路)模块(6)计算机管理控制中心(上位机)特点:系统的设计可靠,操作简单方便,全自动化,优选分析软件,智能控制,而且安装简便,维护简单,不仅适用于国防工程、人防工程等,而且也可广泛适用于大型建筑、工厂车间、仓库(房)、温室花棚、蔬菜塑料大棚等对温湿度要求较高的场所。
PIC18系列单片机原理和实践

2019/1/4
大连理工大学 电工电子实验中心 陈育斌
5
1.2 PIC18系列单片机的特性
与其它PIC系列单片机一样,采用精简指令集RISC、流 水作业、丰富的内部模块、低功耗大电流驱动等。为了 更适合单片机的C语言开发,18系列设计成较大的信息 存储空间。如: 2M的程序存储器空间; 4K的数据存储空间; 这种设计极大的方便了C语言的设计与编程。
2019/1/4
目
录
第一章 PIC微控制器的历史和特征 1.1 PIC微控制器的产品系列 1.2 PIC18系列微控制器的特性 1.3 PIC微控制器的产品局限性 1.4 PIC微控制器的程序ROM 1.5 PIC微控制器的数据RAM和E2PROM
1.6 PIC微控制器的I/O引脚
1.7 PIC微控制器的外围设备
PIC18系列单片机原理及实践 (第一章)
参考资料:《PIC技术宝典》 PIC Microcontroller and Embedded Systems [美] Rolin D.Mckinlay 著 课件编写:大连理工大学 电工电子实验中心 2009年12月
2019/1/4
大连理工大学 电工电子实验中心 陈育斌
—在3V、32KHz下典型值25uA;
—待机电流典型值0.2uA。
2019/1/4
大连理工大学 电工电子实验中心 陈育斌
12
1.3 PIC微控制器的产品局限性
由于历史原因:PIC单片机的产品是逐渐从低向高发展。 其中最明显的特征是:随着产品性能的提高其内部的硬 件结构也在变化。如程序存储器ROM的宽度会随着产品 性能的升级而加宽,且指令系统也在扩充。
16FXXX:具有丰富的内部模块、完整的指令系统和良 好的向下兼容性。适合初学入门的系列; 18FXXX:高效的16位指令系统、大容量的ROM和RAM 结构使其更适合C语言编程。更为丰富的内部某块和8位 的硬件乘法器使其具备DSP的性能。学习的高级阶段。
单片机原理及应用英语

单片机原理及应用英语英文回答:Microcontroller Basics and Applications.Introduction.A microcontroller is a small, self-contained computer system that is used to control and monitor electronic devices. Microcontrollers are typically used in embedded systems, which are devices that are designed to perform a specific task. Embedded systems are found in a wide variety of applications, including automotive, medical, industrial, and consumer electronics.Microcontroller Architecture.The basic architecture of a microcontroller consists of the following components:Central processing unit (CPU): The CPU is the brains of the microcontroller. It is responsible for executing instructions and performing calculations.Memory: The memory stores the program code and data that are used by the CPU.Input/output (I/O) ports: The I/O ports allow the microcontroller to communicate with other devices.Microcontroller Applications.Microcontrollers are used in a wide variety of applications, including:Automotive: Microcontrollers are used to control engine functions, such as fuel injection, ignition, and emissions control. They are also used in safety systems, such as airbags and anti-lock brakes.Medical: Microcontrollers are used in medical devices, such as pacemakers, defibrillators, and insulin pumps. Theyare also used in diagnostic equipment, such as MRI machines and X-ray machines.Industrial: Microcontrollers are used in industrial automation systems, such as robots, conveyor belts, and packaging machines. They are also used in process control systems, such as those used in chemical plants and refineries.Consumer electronics: Microcontrollers are used in consumer electronics devices, such as cell phones, digital cameras, and televisions. They are also used in home appliances, such as refrigerators, ovens, and washing machines.Conclusion.Microcontrollers are versatile and powerful devicesthat are used in a wide variety of applications. They are essential for the operation of many of the electronic devices that we use every day.中文回答:单片机原理和应用。
指纹识别电子密码锁的设计文献综述

《指纹识别电子密码锁的设计》文献综述王文锐(机电工程学院指导老师李琳)关键词:单片机STC89C52 黑匣子指纹扫描模块矩阵键盘串行通信前言随着信息技术的飞速发展,单片机的应用技术日益渗透到社会生产生活的各个领域。
单片机的全称是单片微型计算机,国际上统称为微控制器。
它采用超大规模集成电路技术把具有数据处理能力(如算术运算、逻辑运算、数据传送、中断处理)的微处理器(CPU),随机存取数据存储器(RAM)、只读程序存储器(ROM)、输入/输出电路(I/O),可能还包括定时/计数器、串口通信口(SCI)、显示驱动电路、脉宽调制电路(PWM)、A/D转换电路等电路集成到一片芯片上,构成就一个最小而完善的计算机系统。
因此,它具有体积小、功能强、价格低等的特点。
其中最大的特点是它可以单独地完成现代工业控制所要求的智能化控制功能。
因此,选用单片机作为控制核心是较为理想的设计理念。
正文在设计系统中主要由单片机系统、矩阵键盘、LED显像管和报警系统组成。
设置开锁密码,利用软件与硬件结合的方法来实现。
系统能完成本机开锁、超时报警、超次锁定、管理员解密、修改用户密码基本的密码锁的功能。
除上述基本的密码锁功能外,依据实际的情况还可以添加调电存储、声光提示、遥控控制等功能。
本系统成本低廉,功能实用。
系统方框图如下:电子防盗锁应用于金融业,其根本的作用是“授权”,即被“授权”的人才可以存取钱、物。
广义上讲,金融业的“授权”主要包括以下三种层次的内容:1、授予保管权,如使用保管箱、保险箱和保险柜;2、授予出入权,如出入金库、运钞车和保管室;3、授予流通权,如自动存取款。
目前,金融行业电子防盗锁的应用主要集中在前两个层面上。
下面将介绍几种在金融行业中使用较多的电子防盗锁以及它们的技术发展方向。
当然,以上所说的授权技术再高超,都必须由精良的“锁具”担当承载结构部件,实现开启、闭锁的功能,而且承担实体防护作用,抵抗住或尽量延迟破坏行为,让电子防盗锁“软、硬不吃”。
清华电子信息科学与技术 培养方案
电子工程系概况为了适应学科的快速发展和宽口径培养的需要,电子系的本科生按照电子信息科学大类招生,每年招生10个班,包括一个国防定向班。
电子系是清华大学学生人数最多的大系,招生质量也一直名列前茅,每年选择到电子系就读的全国各省区市高考前十名的学生数十名,另外还有多名全国或国际竞赛的佼佼者。
本科生培养的专业方向是电子信息科学与技术。
博士和硕士研究生培养按照电子科学与技术和信息与通信工程两个一级学科方向。
同时培养电子与通信工程领域的专业硕士研究生。
培养目标电子工程系的本科学生应掌握扎实的基础理论、专业基础理论和专业知识及基本技能;具有成为高素质、高层次、多样化、创造性人才所具备的人文精神以及人文、社科方面的背景知识;具有国际化视野;具有创新精神;具有提出、解决带有挑战性问题的能力;具有进行有效的交流与团队合作的能力;具有在相关领域跟踪、发展新理论、新知识、新技术的能力;具有从事相关领域的科学研究、技术开发、教育和管理等工作的能力。
专业方向:电子信息科学与技术电子信息科学与技术是信息科学技术的前沿学科,该领域也是信息产业的重要基础和支柱之一。
电子信息科学与技术专业以电路与系统、信号与信息处理、通信与网络、电磁场与波、计算机及软件技术等理论为基础,研究各种信息的处理、交换和传输,在此基础上研究和发展各种电子与信息系统。
以现代物理学与数学为基础,采用计算机与信息处理技术,研究电子、光子的运动及在不同介质中的相互作用规律,发明和发展各种信息电子材料和元器件、信息光电子材料和器件、集成电路和集成光电子系统。
本专业方向主要研究内容为: 1)各种信息如语音、文字、图像、雷达、遥感信息等的处理、传输、交换、检测与识别的理论和技术,卫星、无线、有线、光纤通信系统和下一代网络技术;2)电路理论、集成电路设计、电子系统设计及应用、系统仿真与设计自动化;3)微波、天线、电磁兼容理论与技术,电磁波应用技术;4)计算机应用技术;5)物理电子与集成光电子学、纳米光电子学、光纤通信系统与智能光网络技术、新型显示和新型电光薄膜材料与器件、大功率高速电子器件、微细技术和信息光电子材料评价与检测技术等。
中英文互译

单片机也被称为微控制器(Microcontroler),单片机由芯片内仅有CPU 的专用处理器发展而来。
最早的设计理念是通过将大量外围设备和CPU 集成在一个芯片中,使计算机系统更小,更容易集成。
早期的单片机都是8 位或 4 位的。
其中最成功的是INTEL 的8031,因为简单可靠而性能不错获得了好评。
此后在8031 上发展出了MCS51 系列单片机系统。
基于这一系统的单片机系统直到现在还在广泛使用。
随着工业控制领域要求的提高,开始出现了16 位单片机。
90 年代后随着消费电子产品大发展,单片机技术得到了巨大的提高。
随着INTEL i960 系列的出现,特别是后来的ARM 系列的广泛应用,32 位单片机迅速取代16 位单片机的高端地位,并且进入主流市场。
而传统的8 位单片机的性能也得到了飞速提高,处理能力比起80 年代提高了数百倍。
目前,高端的32 位单片机主频已经超过300MHz,性能直追90 年代中期的专用处理器。
当代单片机系统已经不再只在裸机环境下开发和使用,大量专用的嵌入式操作系统被广泛应用在单片机上。
作为掌上电脑和手机核心处理的高端单片机甚至可以直接使用专用的Windows 和Linux 操作系统。
单片机比专用处理器更适合应用于嵌入式系统。
事实上单片机是世界上数量最多的计算机。
现代人类生活中所用的几乎每件电子和机械产品中都会集成有单片机。
手机、电话、计算器、家用电器、电子玩具、掌上电脑以及鼠标等电脑配件中都配有1-2 部单片机。
而个人电脑中也会有为数不少的单片机在工作。
汽车上一般配备40 多部单片机,复杂的工业控制系统上甚至可能有数百台单片机在同时工作!单片机的数量不仅远超过PC 机和其他计算的综合,甚至比人类的数量还要多。
在单片机应用中,单片机的系统软件抗干扰和单片机的编程调试一直困扰着初学者。
本文就简单的介绍这两个问题。
单片机系统软件抗干扰方法在提高硬件系统抗干扰能力的同时,软件抗干扰以其设计灵活、节省硬件资源、可靠性好越来越受到重视。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Microcontroller and embedded systemsModern computer technology, industrial revolution, the world economy from the capital into the economy to knowledge economy. Filed in the electronic world, from the 20th century into the era of radio to computer technology in the 21st century as the center of the intelligent modern era of electronic systems.The basic core of modern electronic systems are embedded computer systems (referred to as embedded systems), while the microcontroller is the most typical and most extensive and most popular embedded systems.If the 50's, radio has created several generations of the world elite, then today's SCM will create a new generation of e-world elite.A single chip with you to the intelligent electronicsIf we as a dead classic electronic system electronic system, then the intelligent modern electronic systems is a "life" of the electronic system. Application System of hardware, electronic systems, "body", microcontroller applications, the application gives it "life." For example, in the design of intelligent machines monitor display, it can boot the system self-test results show, not to enter the work shows a variety of stand-by state, equipment run-time display running processes, work can be displayed after the end of the current results, self results, raw data, reports and other various processing. Unattended, it can run automatically given a variety of functions.Intelligent electronic systems for the endless realm, often without additional hardware resources can achieve all kinds of renovated function. It is also present in many household appliances feature a large number of additional factors.single chip to create the modern era of electronic systemsA microcontroller and embedded systemsEmbedded computer systems from embedded applications, embedded systems for early general-purpose computer adapted to the object system embedded in a variety of electronic systems, such as the ship's autopilot, engine monitoring systems. Embedded system is primarily a computer system, followed by it being embedded into the object system, objects in the object system to achieve required data collection, processing, status display, the output control functions, as embedded in the object system, embedded system computer does not have an independent form and function of the computer. SCM is entirely in accordance with the requirements of embedded system design, so SCM is the most typical embedded systems. SCM is the early application of technical requirements in accordance with the design of embedded computer chip integration, hence the name single chip. Subsequently, the MCU embedded applications to meet the growing demands of its control functions and peripheral interface functions, in particular, highlight the control function, so has international name the single chip microcontroller (MCU, Microcontroller Unit).An one-chip computer system is made up of several following parts: ( 1) One microprocessor of 8 (CPU). ( 2) At slice data memory RAM (128B/256B),it use not depositting not can reading /data that write, such as result not middle of operation, final result and data wanted to show, etc. ( 3) Procedure memory ROM/EPROM (4KB/8KB ), is used to preserve the procedure , some initial data and form in slice. But does not take ROM/EPROM within some one-chip computers, such as 8031 , 8032, 80C ,etc.. ( 4) Four 8 run side by side I/O interface P0 four P3, each mouth can use as introduction , may use as exporting too. ( 5) Two timer / counter, each timer / counter may set up and count in the way, used to count to the external incident, can set up into a timing way too, and can according to count or result of timing realize the control of the computer. ( 6) Five cut off cutting off the control system of the source . ( 7) One all duplexing serial I/Omouth of UART (universal asynchronous receiver/transmitter (UART) ), is it realize one-chip computer or one-chip computer and serial communication of computer to use for. ( 8) Stretch oscillator and clock produce circuit, quartz crystal finely tune electric capacity need outer. Allow oscillation frequency as 12 megahertas now at most. Every the above-mentioned part was joined through the inside data bus .Among them, CPU is a core of the one-chip computer, it is the control of the computer and command centre, made up of such parts as arithmetic unit and controller , etc.. The arithmetic unit can carry on 8 persons of arithmetic operation and unit ALU of logic operation while including one, the 1 storing device temporarilies of 8, storing device 2 temporarily, 8's accumulation device ACC, register B and procedure state register PSW, etc. Person who accumulate ACC count by 2 input ends entered of checking etc. temporarily as one operation often, come from person who store 1 operation is it is it make operation to go on to count temporarily , operation result and loopback ACC with another one. In addition, ACC is often regarded as the transfer station of data transmission on 8051 inside . The same as general microprocessor, it is the busiest register. Help remembering that agreeing with A expresses in the order. The controller includes the procedure counter , the order is depositted, the order decipher, the oscillator and timing circuit, etc. The procedure counter is made up of counter of 8 for two, amounts to 16. It is a byte address counter of the procedure in fact, the content is the next IA that will carried out in PC. The content which changes it can change the direction that the procedure carries out . Shake the circuit in 8051 one-chip computers, only need outer quartz crystal and frequency to finely tune the electric capacity, its frequency range is its 12MHZ of 1.2MHZ. This pulse signal, as 8051 basic beats of working, namely the minimum unit of time. 8051 is the same as other computers, the work in harmony under the control of thebasic beat, just like an orchestra according to the beat play that is commanded.The monolithic integrated circuit interior also uses with the computer function similar module, for instance CPU, memory, parallel main line, but also has with the hard disk behave identically the memory component7 what is different is its these part performance is opposite our home-use computer weak many, but the price is also low, generally does not surpass 10 Yuan then Made some control electric appliance one kind with it is not the 'very complex work foot, We use now the completely automatic drum washer, the platoon petti-coat pipe: VCD and so on Inside the electrical appliances may see its form! It is mainly takes the control section the core part.It is one kind of online -like real-time control computer, online -like is the scene control, needs to have the strong antijamming ability, the low cost, this is also and the off-line type computer (for instance home use PC,) main differenceThe monolithic integrated circuit is depending on the procedure, and may revise. Realizes the different function through the different procedure, particularly special unique some functions, this is other component needs to take the very big effort to be able to achieve, some are the flowered big strength is also very difficult to achieve. One is not the very complex function, if develops in the 50s with the US 74 series, or the 60s's CD4000 series these pure hardware do decides, the electric circuit certainly arc a big PCB board ! But if, if succeeded in the 70s with the US puts in the market the series monolithic integrated circuit, the result will have the huge difference. Because only the monolithic integrated circuit compiles through you the procedure may realize the high intelligence, high efficiency, as well as redundant reliabilityXTAL1 and XTAL2 are the input and output, respectively,of an inverting amplifier which can be configured for use as an on-chip oscillator, as shown in Figure 1.Either a quartz crystal or ceramic resonator may be used. To drive the device from an external clock source, XTAL2 should be left unconnected while XTAL1 is driven as shown in Figure 2.There are no requirements on the duty cycle of the external clock signal, since the input to the internal clocking circuitry is through a divide-by-two flip-flop, but minimum and maximum voltage high and low time specifications must be observed.VCC Supply voltage.GND Ground.Port 0:Port 0 is an 8-bit open-drain bi-directional I/O port. As an output port, each pin cansink eight TTL inputs. When 1s are written to port 0 pins, the pins can be used as highimpedance inputs.Port 0 may also be configured to be the multiplexed loworder address/data busduring accesses to external program and data memory. In this mode P0 has internalpullups.Port 0 also receives the code bytes during Flash programming,and outputs the codebytes during program verification. External pullups are required during programverification.Port 1:Port 1 is an 8-bit bi-directional I/O port with internal pullups.The Port 1 output buffers can sink/so -urce four TTL inputs.When 1s are written to Port 1 pins they are pulled high by the internal pullups and can be used as inputs. As inputs, Port 1 pins that are externally being pulled low will source current (IIL) because of the internal pullups.Port 1 also receives the low-order address bytes during Flash programming and verification.Port 2:Port 2 is an 8-bit bi-directional I/O port with internal pullups.The Port 2 outputbuffers can sink/source four TTL inputs.When 1sare written to Port 2 pins they arepulled high by the internal pullups and can be used as inputs. As inputs, Port 2 pins that are externally being pulled low will source current (IIL) because of the internal pullups. Port 2 emits the high-order address byte during fetches from external program memory and during accesses to Port 2 pins that are externally being pulled low will source current (IIL) because of the internal pullups.Port 2 emits the high-order address byte during fetches from external program memory and during accesses to external data memory that use 16-bit addresses (MOVX@DPTR). In this application, it uses strong internal pull-ups when emitting 1s. During accesses to external data memory that use 8-bit addresses (MOVX @ RI), Port 2 emits the contents of the P2 Special Function Register.Port 2 also receives the high-order address bits and some control signals durin Flash programming and verification.Port 3:Port 3 is an 8-bit bi-directional I/O port with internal pullups.The Port 3 outputbuffers can sink/sou -rce four TTL inputs.When 1s are written to Port 3 pins they are pulled high by the internal pullups and can be used as inputs. As inputs,Port 3 pins that are externally being pulled low will source current (IIL) because of the pullups.Port 3 also serves the functions of various special featuresof the AT89C51 as listed below:RST:Reset input. A high on this pin for two machine cycles while the oscillator is running resets the device.ALE/PROG:Address Latch Enable output pulse for latching the low byte of the address duringaccesses to external memory.This pin is also the program pulse input (PROG) during Flash programming.In normal operation ALE is emitted at a constant rate of 1/6 the oscillator frequency,and may be used for external timing or clocking purposes. Note, however, that one ALEpulse is skipped duri -ng each access to external DataMemory.If desired, ALE operationcan be disabled by setting bit 0 of SFR location 8EH. Withthe bit set, ALE is active onlyduring a MOVX or MOVC instruction. Otherwise, the pin is weakly pulled high. Settingthe ALE-disable bit has no effect if the microcontroller is in external execution mode.PSEN:Program Store Enable is the read strobe to external program memory. When theAT89C51 is executing code from external program memory, PSEN is activated twiceeach machine cycle, except that two PSEN activations are skipped during each access toexternal data memory.EA/VPP:External Access Enable. EA must be strapped to GND in order to enable the deviceto fetch code from external program memory locations starting at 0000H up to FFFFH.Note, however, that if lock bit 1 is programmed, EA will be internally latched onreset.EA should be strapped to VCC for internal program executions. This pin alsreceives the 12-volt programming enable voltage (VPP) during Flash programming, forparts that require 12-volt VPP.XTAL1:Input to the inverting oscillator amplifier and input to the internal clock operatingcircuit.XTAL2 :Output from the inverting oscillator amplifier.Oscillator CharacteristicsXTAL1 and XTAL2 are the input and output, respectively, of an inverting amplifierwhich can be configured for use as an on-chip oscillator, as shown in Figure 1. Either aquartz crystal or ceramic resonator may be used. To drive the device from an externalclock source, XTAL2 should be left unconnected while XTAL1 is driven as shown in Figure 2.There are no requirements on the duty cycle of the external clock signal, since the input to the internal clocking circuitry is through a divide-by-two flip-flop, but minimum and maximum voltage high and low time specifications must be observed. Idle Mode In idle mode, the CPU puts itself to sleep while all the onchip peripherals remain active. The mode is invoked by software. The content of the on-chip RAM and all the special functions registers remain unchanged during this mode. The idle mode canbe terminated by any enabled interrupt or by a hardware reset. It should be noted that when idle is terminated by a hard ware reset, the device normally resumes program execution, from where it left off, up to two machine cycles before the internal reset algorithm takes control. On-chip hardware inhibits access to internal RAM in this event, but access to the port pins is not inhibited. To eliminate the possibility of an unexpected write to a port pin when Idle is terminated by reset, the instruction following the one that invokes Idle should not be one that writes to a port pin or to external memory.。