51单片机电机正反转控制程序
51单片机直流电机正反转程序

51单片机直流电机正反转程序在工业自动化、机器人、电子设备等领域,直流电机是一种常见的电动机。
直流电机具有结构简单、转速范围广、转矩大、控制方便等优点,因此被广泛应用。
在直流电机的控制中,正反转是一种常见的操作。
本文将介绍如何使用51单片机控制直流电机的正反转。
1. 直流电机的原理直流电机是一种将电能转化为机械能的电动机。
它的基本结构由定子、转子、电刷和电枢组成。
当电枢通电时,电枢内部会产生磁场,与定子磁场相互作用,从而产生转矩,使转子转动。
电刷则用来改变电极的极性,使电极的磁场方向与定子磁场方向相互作用,从而使电机正反转。
2. 51单片机控制直流电机的原理51单片机是一种常用的微控制器,具有体积小、功耗低、易于编程等优点。
在控制直流电机时,我们可以使用51单片机来控制电机的正反转。
具体实现方法是通过控制电机的电极极性来改变电机的转向。
3. 51单片机直流电机正反转程序下面是一段使用51单片机控制直流电机正反转的程序:#include <reg52.h>sbit IN1 = P1^0; //定义IN1引脚sbit IN2 = P1^1; //定义IN2引脚void delay(unsigned int t) //延时函数 {unsigned int i, j;for(i=0; i<t; i++)for(j=0; j<125; j++);}void main(){while(1){IN1 = 1; //IN1引脚输出高电平 IN2 = 0; //IN2引脚输出低电平 delay(1000); //延时1秒IN1 = 0; //IN1引脚输出低电平 IN2 = 1; //IN2引脚输出高电平 delay(1000); //延时1秒}```上述程序中,我们使用了P1口的0、1引脚来控制电机的正反转。
当IN1引脚输出高电平、IN2引脚输出低电平时,电机正转;当IN1引脚输出低电平、IN2引脚输出高电平时,电机反转。
51单片机直流电机反转

51单片机直流电机反转在现代工业生产中,直流电机作为一种重要的动力装置,广泛应用于各种机械设备中。
其中,电机的正反转控制是直流电机应用中的一个重要环节。
本文将以为主题,探讨其原理与实现方法。
直流电机是将电能转换为机械能的装置,其结构简单、运行可靠,在工业生产中应用广泛。
在很多情况下,需要对电机进行正反转控制,以满足不同的工作需求。
而使用51单片机进行直流电机反转控制,是一种简单有效的方法。
首先,我们需要了解直流电机的结构与工作原理。
直流电机主要由定子、转子和碳刷组成。
当定子上通入直流电流时,形成一个磁场,引起转子旋转。
电机的正反转实际上就是改变定子磁场方向的问题。
通过改变定子和转子之间的相对位置,可以实现电机的正反转。
在51单片机直流电机反转控制中,一般采用H桥驱动电路。
H桥电路由四个晶体管组成,可以实现电机的正反转控制。
通过控制H桥中各个晶体管的导通与断开,可以改变电机的正反转方向。
在实际应用中,需要根据具体需求设计合适的控制算法。
控制算法的设计涉及到脉宽调制、速度控制、位置控制等方面。
通过合理设计算法,可以实现对直流电机的精确控制。
另外,在51单片机直流电机反转控制中,还需要考虑到电机的保护问题。
在工作过程中,电机可能会出现过载、过热等情况,需要设置相应的保护装置,以保证电机的安全运行。
让我们总结一下本文的重点,我们可以发现,51单片机直流电机反转控制是一种简单有效的方法,通过合理设计控制算法和保护装置,可以实现对直流电机的精确控制。
在工业生产中,这种控制方法具有重要的应用价值,可以提高生产效率,降低能耗成本,值得进一步研究与推广。
基于51单片机的 红外遥控电机正反转程序 要求:P3.2接红外接收头 控制两个电机正反

cord=irdata[k];
// if(cord>7)//大于某值为1, 1.792mS
if(cord>6)//大于某值为1,11.0592M
Hale Waihona Puke { value=value|0x80;
unsigned char irtime;//红外用全局变量
bit irpro_ok,irok;
unsigned char IRcord[4]; //一次发射有4个编码值,还是5个 应该是4个,但编号为0-3
unsigned char irdata[33];//一次发射其有33 位
//////////////////////////////////////////////
数据码以及他们的反码的先导。同步位(SY)是标志最后一位编码是“0”或“1”的标识位,它只有0.56ms的有载波信号构成。*/
#include<reg52.h>
#include<stdio.h>
#include<intrins.h>
////////////////////////////////////////////////
}
///////////////////////////////////////////////////////////////////
void EX0init(void)
{
IT0 = 1; // Configure interrupt 0 for falling edge(下降沿) on /INT0 (P3.2)
void TIM0init(void)//定时器0初始化
{
TMOD=0x02;//定时器0工作方式2,TH0是重装值,TL0是初值,约256US
基于51单片机的步进电机正反转可控设计与仿真

2020.19设计研发基于51单片机的步进电机正反转可控设计与仿真李建中(江苏省海门中等专业学校,江苏南通,226100)摘要:步进电机是伺服控制中的关键部件,对步进电机进行精确高效地控制,是实现精密运动、制造等的重要手段。
釆用51单片机作为电机的控制核心-ULN2003A作为电机的驱动芯片,选用额定电压为5V的小型步进电机,设置正转、反转、停止、加速、减速5个按钮,其中正转、反转和停止均有对应的LED指示灯。
通过Keil进行控制程序的编写,在Proteus 中进行仿真电路的连接,结果表明:电路设计正确;步进电机能够根据按钮指令进行运转,达到了设计预期;系统可应用于某些需要高精度控制的场合。
关键词:步进电机;51单片机;ULN2003A;Keil;ProteusDesign and Simulation of Positive and Negative Rotation ofStepping Motor Based on51Single Chip MicrocomputerLi Jianzhong(Jiangsu Province Haimen Secondary Vocational School,Narrtong Jiangsu,226100)Abst r act;St epper motor is the key compone n t in servo cont r ol.It is an import a n t means to realize precise motion and manufacture to control stepping motor accurately and efficiently.51single chip microcomputer is used as the cont r ol core of the mot o r,uln2003a is used as the driving chip of the motor,the small st e pping motor with:r ated volt a ge of5V is selec t ed,and five buttons of forward rotation,reverse rotation,stop,acceleration and deceleration are set,and the corresponding LED indicator lights are used for forward rotation,reverse rotation and stop.The resuIts show that:the circuit design is correct;the stepper motor can operate according to the button command,which meets the design expectation;the system can be applied to some occasions requiring high-precision control.Keywords:stepper motor;51single chip microcomputer;ULN2003A;Keil;Proteus0引言步进电机在工业制造、数控机床、各种伺服系统中均有应用。
51单片机按键控制步进电机加减速及正反转
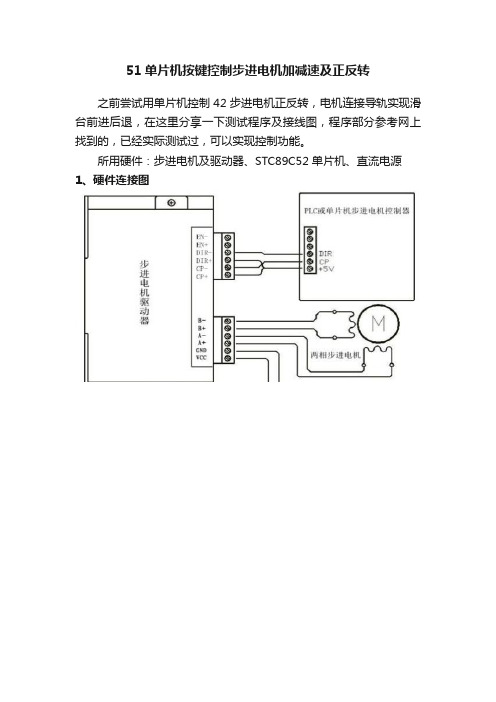
51单片机按键控制步进电机加减速及正反转之前尝试用单片机控制42步进电机正反转,电机连接导轨实现滑台前进后退,在这里分享一下测试程序及接线图,程序部分参考网上找到的,已经实际测试过,可以实现控制功能。
所用硬件:步进电机及驱动器、STC89C52单片机、直流电源1、硬件连接图•注意:上图为共阳极接法,实际连接参考总体线路连接。
•驱动器信号端定义:PUL+:脉冲信号输入正。
( CP+ )PUL-:脉冲信号输入负。
( CP- )DIR+:电机正、反转控制正。
DIR-:电机正、反转控制负。
EN+:电机脱机控制正。
EN-:电机脱机控制负。
•电机绕组连接A+:连接电机绕组A+相。
A-:连接电机绕组A-相。
B+:连接电机绕组B+相。
B-:连接电机绕组B-相。
•电源连接VCC:电源正端“+”GND:电源负端“-”注意:DC直流范围:9-32V。
不可以超过此范围,否则会无法正常工作甚至损坏驱动器.•总体线路连接输入信号共有三路,它们是:①步进脉冲信号PUL+,PUL-;②方向电平信号DIR+,DIR-③脱机信号EN+,EN-。
输入信号接口有两种接法,可根据需要采用共阳极接法或共阴极接法。
在这里我采用的是共阴极接法:分别将PUL-,DIR-,EN-连接到控制系统的地端(接入单片机地端);脉冲输入信号通过PUL+接入单片机(代码中给的P2^6脚),方向信号通过DIR+接入单片机(代码中给的P2^4脚),使能信号通过EN+接入(不接也可,代码中未接,置空)。
按键连接见代码,分别用5个按键控制电机启动、反转、加速、减速、正反转。
注意:接线时请断开电源,电机接线需注意不要错相,相内相间短路,以免损坏驱动器。
2、代码1.#include<reg51.h>2.#define MotorTabNum 53.unsigned char T0_NUM;4.sbit K1 = P3^5; // 启动5.sbit K2 = P3^4; // 反转6.sbit K3 = P3^3; // 加速7.sbit K4 = P3^2; // 减速8.sbit K5 = P3^1; //正反转9.10.sbit FX = P2^4; // 方向11.//sbit MotorEn = P2^5; // 使能12.sbit CLK = P2^6; // 脉冲13.14.inttable[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x40};15.16.unsigned char g_MotorSt = 0; //17.unsigned char g_MotorDir = 0; //18.unsigned char MotorTab[7] = {12, 10, 8, 6, 4, 2,1};19.20.signed char g_MotorNum = 0;21.22.void delayms(xms);23.void mDelay(unsigned int DelayTime);24.void T0_Init();25.26.void KeyScan(void);27.28.29.30.void main(void)31.{32.T0_Init();33.// MotorEn = 0; //34.FX = 0;35.while(1)36.{37.KeyScan(); //38.}39.40.41.}42.43.void T0_Init()44.{45.TMOD = 0x01;46.TH0 = (65535-100)/256; // 1ms47.TL0 = (65535-100)%256;48.EA = 1;49.ET0 = 1;50.// TR0 = 1;51.52.}53.54.void T0_time() interrupt 155.{56.// TR0 = 0;57.TH0 = (65535-100)/256;58.TL0 = (65535-100)%256;59.T0_NUM++;60.if(T0_NUM >= MotorTab[g_MotorNum]) //61.{62.T0_NUM = 0;63.CLK=CLK^0x01; //64.}65.// TR0 = 1;66.}67.68.69.//--------------------------70.void KeyScan(void)71.{72.if(K1 == 0)73.{74.delayms(10);75.if(K1 == 0)76.{77.g_MotorSt = g_MotorSt ^ 0x01;78.// MotorEn ^= 1;79.TR0 = 1;80.FX ^= 0; //反转81.}82.}83.84.if(K2 == 0)85.{86.delayms(10); //正转87.if(K2 == 0)88.{89.g_MotorDir = g_MotorDir ^ 0x01;90.FX ^= 1; //加速91.}92.}93.94.if(K3 == 0) //95.{96.delayms(5); //加速97.if(K3 == 0)98.{99.g_MotorNum++;100.if(g_MotorNum > MotorTabNum) 101.g_MotorNum = MotorTabNum; 102.}103.}105.if(K4 == 0) //106.{107.delayms(5); // 减速108.if(K4 == 0)109.{110.g_MotorNum--;111.if(g_MotorNum < 0)112.g_MotorNum = 0;113.}114.}115.116.if(K5 == 0) //117.{118.delayms(10); // 正反转119.if(K5 == 0)120.{121.g_MotorSt = g_MotorSt ^ 0x01; 122.g_MotorDir = g_MotorDir ^ 0x01; 123.MotorEn ^= 1;124.TR0 = 1;125.while(1)126.{127.FX ^= 1; //128.delayms(90000);129.FX ^= 0; //130.delayms(90000);131.}132.}133.}135.136.void delayms(xms)//延时137.{138.unsigned int x,y;139.for(x=xms;x>0;x--)140.for(y=110;y>0;y--);141.}3、常见问题解答•控制信号高于5v一定要串联电阻,否则可能会烧坏驱动器控制接口电路。
基于51单片机控制步进电机正反转

基于51单片机控制步进电机正反转此次采用uln2003模块来链接步进电机;## 步进电机工作原理步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。
每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。
步进电动机的结构形式和分类方法较多,一般按励磁方式分为磁阻式、永磁式和混磁式三种;按相数可分为单相、两相、三相和多相等形式。
因此我们可以控制单片机I/O口的电平来控制步进电机,此次设计中采用四相单拍工作方式,在这种工作方式下,A、B、C、D 三相轮流通电,电流切换三次,磁场旋转一周,转子向前转过一个齿距角。
因此这种通电方式叫做四相单四拍工作方式。
1.电机正转代码unsigned char code tableZ[8]={0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09};2.电机反转代码unsigned char code tableF[8]={0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08};代码如下#include <reg52.h>#define uint unsigned int #define uchar unsigned charunsigned char code tableZ[8]={0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09};unsigned char code tableF[8]={0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08};//²½½øµç»úzhengvoid delay(unsigned int t);sbit S3=P3^4; //反转sbit S4=P3^5; //反停sbit S5=P3^6; // 正停//正转写入数据void motor_z() { unsigned char i,j; for (i=0; i<8; i++) { if(S5==0){break;} for(j=0;j<8;j++){ P1 = tableZ[i]&0x1f; delay(50); } } }//反转写入数据void motor_f(){ unsigned char i,j; for (i=0; i<8; i++) { if(S4==0){break;} for(j=0;j<8;j++){ P1 = tableF[i]&0x1f;delay(50); } }}void delay(unsigned int t)//延时函数{ unsigned int k; while(t--) { for(k=0; k<60; k++) { } }}void main(){while(1){motor_z();if(S3 == 0){motor_f();}}}•1•2•3•4•5•6•7•8•9•10•11•12•13•14•15•16•17•18•19•20•21•22•23•24•25•26•27•29 •30 •31 •32 •33 •34 •35 •36 •37 •38 •39 •40 •41 •42 •43 •44 •45 •46 •47 •48 •49 •50 •51 •52 •53 •54 •55 •56 •1•3 •4 •5 •6 •7 •8 •9 •10 •11 •12 •13 •14 •15 •16 •17 •18 •19 •20 •21 •22 •23 •24 •25 •26 •27 •28 •29 •30 •31•33•34•35•36•37•38•39•40•41•42•43•44•45•46•47•48•49•50•51•52•53•54•55•56protel仿真图如下。
单片机课程设计-正反转可控的步进电机

正反转可控的步进电机1 引言本课程设计目的是为了进一步掌握单片机系统,加强对系统设计和应用能力的培养而开设的综合设计训练环节。
本系统用51单片机和ULN2003A电机驱动芯片并加入控制按钮来实现步进电机的正、反转控制。
2 设计方案及原理步进电机可以对旋转角度和转动速度进行高精度的控制。
作为控制执行部件,广泛应用于自动控制和精密仪器等领域。
例如在仪器仪表、机床设备以及计算机的外围设备中(如打印机和绘图仪),常有对精确的、可控制的回转源的需要。
在这种情况下,使用步进电机最为理想。
2.1 步进电机控制步进电机两个相邻磁极之间的夹角为60°,线圈绕过相对的两个磁极构成一相。
此外各磁极上还有5个分布均匀的锯形小齿。
电机转子上没有绕组。
当某相绕组通电时,响应的两个磁极就分别形成N-S极,产生磁场,并与转子形成磁路。
如果这是定子的小齿与转子的小齿没有对齐,则在磁场的作用下,转子将转动一定的角度,使转子齿与定子齿对齐,从而使步进电机向前“走”一步。
如果通过单片机按顺序给绕组施加有序的脉冲电流,就可以控制电机的转动,从而进行了数字到角度的转换。
转动的角度大小与施加的脉冲数成正比,转动的速度与脉冲频率成正比,而转动方向则与脉冲的顺序有关。
2.2 步进电机驱动方式步进电机常用的驱动方式是全电压驱动,即在电机移步与锁步时都加载额定电压。
为防止电机过流及改善驱动特性需加限流电阻。
由于步进电机锁步时,限流电阻要消耗掉大量的功率。
因此,限流电阻要有较大功率容量,并且开关管也要有较高的负载能力。
步进电机也可以使用软件方法,即使用单片机实现,这样不但简化了电路,同时降低了成本。
使用单片机以软件方式驱动步进电机,不但可以通过编程方法在一定范围之内自由的设定步进电机的转速,往返转动的角度以及转动次数等;还可以方便灵活的控制步进电机的运行状态,以满足不同用户的需求。
因此常把单片机步进电机控制电路称之为可编程步进电机控制驱动器。
51单片机步进电机控制系统设计
步进电机控制系统设计引言随着人民生活水平的提高,产品质量、性能、自动化程度等已经是人们选择产品的主要因素。
其中,步进电机正反转自动控制在生活中起了很大的作用,比如洗衣机的工作、遥控汽车的操作、DVD的应用等等,它在实际生活中给人们需求上提供了很大的方便与乐趣。
不只是生活,它还在工业、农业、交通运输等各方面得到了广泛的应用,实现电动机正反转的控制是很多产品设计的核心问题。
步进电机显示出交流电动机不能比拟的良好启动性能和调速性能,比较广泛应用于速度调节要求过高,正反转频繁或多元同步协调运转的机械生产。
因此,学会电动机正反转控制的原理是极其重要的。
然而,在本步进电机正反转仿真设计中,要借助Proteus软件、Keil软件和C语言的辅助进行仿真设计,通过仿真设计,让我们更清楚了解步进电机正反转的原理和电路图,增强对步进电机的认知。
在Proteus绘制好原理图后,调入已编译好的目标代码文件:*.HEX,可以在Proteus的原理图中看到模拟的实物运行状态和过程,Proteus还提供了一个图形显示功能,可以将线路上变化的信号,以图形的方式实时地显示出来,其作用与示波器相似,但功能更多。
这些虚拟仪器仪表具有理想的参数指标,例如极高的输入阻抗、极低的输出阻抗。
这些都尽可能减少了仪器对测量结果的影响。
在本设计中,Proteus软件采用了电容、电阻、晶振、电动机、LED、开关、电动机等多种元件进行绘图,并基于80C51和ULN2003A进行电路图设计,充分展示Proteus软件元件库量大,掌握它的基本绘图操作。
而对于Keil软件,采取创建工程,创建执行文件,利用C语言编写程序,生成hex文件,为Proteus 仿真提供驱动控制,实现步进电机正反转的设计。
在本论文设计中,主要介绍步进电机正反转原理,Proteus软件功能绘图、仿真调试,以及Keil软件功能、程序编写和仿真程序文件生成。
让大家更清楚了解Proteus软件、Keil软件、C语言在步进电机正反转仿真设计的应用。
51单片机实现三相六拍的步进电机控制(正反转、加减速、挡位显示)

51单片机实现三相六拍的步进电机控制(正反转、加减速、挡位显示)自己写的,不规范还望包含,keil和protues文件单片机源程序如下:1.#include <reg52.h>2.3.#define uchar unsigned char4.#define uint unsigned int5.uint speed = 100; //初始转速6.uint max = 200; //最慢转速7.uint min = 20; //最快转速8.9.sbit swich = P2^0; //总开关10.sbit dir = P2^1; //电机旋转方向11.sbit le1=P2^6;12.sbit le2=P2^7;13.sbit speedadd=P3^2;14.sbit speedsub=P3^3;15.16.unsigned char uca_MotorStep[]={0x01,0x03,0x02,0x06, 0x04,0x0C,0x08,0x09}; //励磁电流数组。
17.18.19.uchar leddata[]={20.21.0x3F, //"0"22.0x06, //"1"23.0x5B, //"2"24.0x4F, //"3"25.0x66, //"4"26.0x6D, //"5"27.0x7D, //"6"28.0x07, //"7"29.0x7F, //"8"30.0x6F, //"9"31.0x40, //"-"32.0x00, //熄灭33.};34.35.36.void delay1ms(void) //误差 0us37.{38.unsigned char a,b,c;39.for(c=1;c>0;c--)40.for(b=142;b>0;b--)41.for(a=2;a>0;a--);42.}43.44.void delay(uint x ) //多功能毫秒延时45.{46.uint i;47.for(i=0;i<x;i++)48.{49.delay1ms();50.}51.}52.53.54.55.void display(void)56.{57.if(swich==1)58.{59.P0= leddata[11];60.delay(1);61.le2=1;62.le1=1;63.delay(1);64.le2=0;65.le1=0;66.67.}68.else69.{70.if(dir==1)71.{72.P0= leddata[11];73.delay(1);74.le2=1;75.delay(1);76.le2=0;77.}78.else79.{80.P0 =leddata[10];81.delay(1);82.le2=1;83.delay(1);84.le2=0;85.}86.87.P0=leddata[9-(speed-20)/20];88.delay(30);89.le1=1;90.delay(5);91.le1=0;92.93.}94.}95.96.97.void Init_INT0()98.{99.EX0=1; //开启外部中断 0100.IT0=1; //设置成低电平触发,1为下降沿触发101.EX1=1; //开启外部中断 1102.IT1=1; //设置成低电平触发,1为下降沿触发103.EA=1; //开启总中断104.}105.106.void Interrupt0_handler() interrupt 0107.{108.EA=0; //首先关闭总中断,以消除按键出现的抖动所产生的干扰109.delay(20); //同样是为了消除抖动而产生新的中断110.if(speed>min)111.{speed=speed-20;} //限制最快转速112.else113.{speed=min;}114.while(speedadd==0);115.EA=1; //恢复中断116.}117.118.119.void Interrupt1_handler() interrupt 2120.{121.EA=0; //首先关闭总中断,以消除按键出现的抖动所产生的干扰122.delay(20); //同样是为了消除抖动而产生新的中断123.if(speed<max)124.{speed=speed+20;}125.else126.{speed=max;} //限制最慢转速127.while(speedsub==0);128.EA=1; //恢复中断130.131.void main()132.{133.int i; //初始化134.dir=1;135.le1=0;136.le2=0;137.138.139.start:140.if(swich==0)141.{Init_INT0();} //总开关开启,初始化中断,开始转动142.else143.{display(); goto start; }144.145.146.if(dir==1)147.seq:148.{149.while(1)150.{151.display();152.for (i=0; i<8; i++)153.{154.P1 = uca_MotorStep[i]; //取数据155.delay(speed); //调节转速156.}157.if(dir==0) //是否换向159.delay(5); // 换向延时160.goto oppo; //换向161.}162.if(swich==1) //总开关运行中关闭163.goto start; //等待开启164.165.}166.167.}168.else169.oppo:。
毕业设计51单片机控制步进电机正反转的工作原理Protues仿真DXP[指南]
![毕业设计51单片机控制步进电机正反转的工作原理Protues仿真DXP[指南]](https://img.taocdn.com/s3/m/e0b3ae44f524ccbff021848b.png)
毕业设计51单片机控制步进电机正反转的工作原理Protues 仿真 DXP[指南]当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。
1.步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。
仅仅处于一种盲目的仿制阶段。
这就给户在产品选型、使用中造成许多麻烦。
签于上述情况,我们决定以广泛的感应子式步进电机为例。
叙述其基本工作原理。
望能对广大用户在选型、使用、及整机改进时有所帮助。
二、感应子式步进电机工作原理(一)反应式步进电机原理由于反应式步进电机工作原理比较简单。
下面先叙述三相反应式步进电机原理。
1、结构: 电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:2、旋转: 如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。
单片机控制步进电机正反转的实际应用程序
单片机控制步进电机正反转的实际应用程序/*这是一个控制步进电机正反转的实际应用程序*//*选用的是三相步进电机驱动器,p14口线用做步进电机的脉冲控制*//*p13口线用做步进电机的方向控制。
p15,p16,p17是光耦开关量输入*//*信号端,p20,p21,p22,p23与x25045看门狗存储器相连*//*k7,k8键是设定步进电机转动速度参数的加减键*//*k9是启动运行键,按一下k9,步进电机开始运行,直到p17口线有信号输入才停止*/ /*k10是停止键,任何时候按下k10都将停止步进电机当前的运行*//*k11是步进运行键,按一下,步进电机动一下*//*k12键是反向运行键,按一下,步进电机开始反向运行,知道p15口线有信号才停止*/ /*如果p16口线有信号输入,则只有k12键才起作用,其它键都没反应。
*/START:do;$INCLUDE(REG51.DCL)DECLARE (addrl,n,I,j,ok,ds) byte; /*定义变量*/declare l(5) byte;declare (dat,data) byte at (30h);declare delay word;DECLARE ACO(11) BYTE CONSTANT (05h,9fh,23h,0bh,99h,49h,/*定义LED段码表*/ 41h,1fh,01h,09h,00h);declare si literally 'p21',sck literally 'p20'; /*X25045囗线定义*/declare so literally 'p22',cs literally 'p23';dog:procedure; /* 初始化看门狗x25045 */cs=1;call time(1);cs=0;call time(1);cs=1;end dog;run:procedure; /*步进电机运行脉冲输出程序*/if ok=1 thencall dog;do;p14=0;call time(1);p14=1;call time(1);end;end run;DISPLAY:PROCEDURE(L0,L10); /*显示子程序*/DECLARE (L0,L10) BYTE; /*定义显示二位*/n=L10;n=aco(n); /*十位数BCD码译成段码*/sbuf=n; /*十位数送164显示*/do while ti=0; /*等待发送结束*/call dog; /*看门狗定时器复位*/end;n=L0;n=aco(n);sbuf=n; /*个位数送164显示*/do while ti=0;call dog;end;end display;outbyt: procedure(da); /*向看门狗存储器写入一字节*/ declare (i,da) byte;j=da; /*将要写入的字节赋给临时变量J */do i=0 to 7; /*左移8位,送到口线si */sck=0;j=scl(j,1);si=cy;sck=1; /*每移一位数据,跟一个时钟信号*/end;end outbyt;inbyt: procedure; /* 从看门狗存储器读出一字节*/ declare (i,di) byte;j=0;do i=0 to 7;sck=1;sck=0;cy=so;j=scl(j,1); /*从看门狗存储器读出一字节送入临时变量j*/ end;dat=j;end inbyt;wrenable: procedure; /* 置看门狗写使能*/sck=0;cs=0;; /* write enable command */call outbyt(06h); /* x25045 写使能指令06h */cs=1;sck=0;end wrenable;wrdisable: procedure; /* 置看门狗写禁止*/sck=0;cs=0;; /* write disable command */call outbyt(04h);sck=0;cs=1;end wrdisable;wrregister: procedure; /* 写状态寄存器*/sck=0;cs=0;dat=01h; /* write register command */call outbyt(dat);; /* 00h--1.4S, 20h--200MS, 10h--600MS, 30h--disable Wdog */ call outbyt(00h); /* 设定看门狗定时时间*/;sck=0;cs=1;call time(200); /* wait to complete writting cycle */end wrregister;rdregister:procedure; /* 读看门狗状态寄存器*/sck=0;cs=0;; /* register read command */call outbyt(05h);call inbyt; /* status register read in <DAT> */sck=0;cs=1;end rdregister;wbyte:procedure; /* 看门狗存储器字节写入子程序*/ declare comm byte;sck=0;cs=0;comm=02h; /* 写指令02h */call outbyt(comm);call outbyt(addrl);call outbyt(dat); /* send one byte data to X25043 */cs=1;sck=0;call time(150);end wbyte;rbyte:procedure; /*看门狗存储器字节读出子程序*/declare comm byte;sck=0;cs=0;comm=03h; /* read command */call outbyt(comm);call outbyt(addrl);call inbyt; /* read one byte to <DAT> */sck=0;cs=1;end rbyte;incdata: procedure; /* 参数修改--"加"键处理子程序+ */if p10=0 then /* 如果K7键按下*/do;do while p10=0; /* 等待键松开有效*/call dog; /* 此处必需调用看门狗复位子程序("喂狗"),否则程序将被看门狗复位*/ end;data=data+1; /* 设定值+1 */if data>99 then data=1; /* 规定设定值的上限*/L(1)=data MOD 10; /*将设定值的十位数拆出来送给十位数显示变量L(1) */L(2)=data/10; /*将设定值的个位数拆出来送给个位数显示变量L(2) */call display(L(1),L(2)); /* 将改变后的设定值送164显示出来*/call time(200); /* 延时*/call dog;call time(200);call dog;call wrenable; /* 置存储器写使能*/addrl=00h; /* 置存储器地址*/dat=l(1);call wbyte; /* 将变量L(1)的值写入存储器00h位置*/call wrenable;addrl=01h;dat=l(2);call wbyte; /* 将变量L(2)的值写入存储器01h位置*/end;end incdata;decdata: PROCEDURE; /* 参数修改---"减"键处理子程序- */IF p11=0 THEN /* k8 键处理子程序*/do;do while p11=0;call dog;end;DATA=DATA-1; /* 设定值-1 */if data=0 then data=99;L(1)=data MOD 10;L(2)=data/10;call display(l(1),l(2));call dog;call time(200);call dog;call time(200);call dog;call wrenable;addrl=00h;dat=l(1);call wbyte;call wrenable;addrl=01h;dat=l(2);call wbyte;end;END decdata;starton: PROCEDURE; /* start */declare sd byte;if p12=0 THEN /* K9键处理子程序*/do;do while p12=0;call dog;end;if p17=0 then ok=0; /* 如果p17 口线上有信号输入,则运行标志置0 (停止运行)*/ p13=1; /* 置步进电机正向运转*/call time(200);call dog;do while ok=1; /* 当运行标志为1时,执行速度延时操作*/do sd= 0 to data; /* 根据设定值data的数值延时来确定步进电机运行时的脉冲给定速度*/call dog;end;end;END starton;step: PROCEDURE; /* step */declare sd byte;p13=1; /* 置步进电机正向运转*/call time(200);IF p33=0 THEN /* k11键处理子程序*/do;if p17=0 then ok=0; /* 如果p17上有信号输入,则停止运行*/do while p33=0;do sd= 0 to data; /* 调用延时,调整步进电机的运行速度*/call dog;call time(2);end;call run;call dog;end;end;ok=0;END step;back: PROCEDURE; /* 反向运行处理子程序*/declare sd byte;IF p34=0 THENdo;do while p34=0;call dog;end;if p15=0 then ok=0; /* 反向运行时,如果遇到p15上有信号输入,则停止步进电机运行*/ p13=0; /* 置步进电机反向运行*/call time(200);call dog;do while ok=1;do sd=0 to data; /*根据设定值调节步进电机的运行速度*/call dog;call time(2);end;call run;if (p15=0 or p32=0 ) then ok=0; /* p15 或p32 口线任意一个有信号输入,停止运行*/ end;end;END back;MAIN$PROGRAM: /* 初始化主程序*/ea=0; /* 关中断*/SCON=00h; /*置串口方式0 ,串行数据输出模式*/PCON=00h;tmod=11h;enable; /* 开中断(ea=1) */SCK=0;cs=1; /* 定义存储器口线初始状态*/call wrenable;call wrregister; /* 看门狗存储器初始化*/call wrenable;call dog;p2=0ffh; /* 初始化各个口线的状态*/p1=0ffh;ok=0;p14=1;p32=1;p33=1;p34=1;p13=1;ADDRL=00h; /* 上电复位后从存储器中读出设定的速度值*/CALL rbyte;l(1)=dat;addrl=01h;call rbyte;l(2)=dat;DATA=L(1)+L(2)*10; /*将读出的值合并成十进制,存入变量data中*/ /* 以下是主循环程序*/LOOP:IF p10=0 THEN CALL incdata; /* 检测各个按键是否有按下*/IF p11=0 THEN CALL decdata;if p12=0 thendo;ok=1;call starton;end;if p34=0 thendo;ok=1;call back;end;if p33=0 thendo;ok=1;call step;end;call dog;CALL DISPLAY(L(1),L(2)); /* 将设定值送164显示*/call dog;CALL TIME(100);call dog;GOTO LOOP;END START;。
MCS51单片机控制直流无刷电机程序
;*************************************************;MCS51单片机控制直流无刷电机程序;*************************************************org 00hajmp startorg 30h;**********检测键盘状态的程序****************START:mov p0,#0ffh ;置p0为输入口,将P0口置为1,用于检查按键是否按下jnb p0.0,QIDONG ;按键S2按下,p0.0为0,进入启动(正转)程序jnb p0.1,FANZHUAN ;按键S3按下,p0.1为0,进入反转程序jnb p0.2,JITING ;按键S4按下,p0.2为0,进入急停程序jnb p0.3,JIASU ;按键S5按下,p0.3为0,进入加速程序jnb p0.4,JIANSU ;按键S6按下,p0.4为0,进入减速程序jnb p0.5,TINGZHI ;按键S7按下,P0.5为0,进入停止程序ajmp start;************启动程序,默认为顺时针转动,转速为2000RPM*********** QIDONG:LCALL YANSHI ;调用延时子程序,目的:软件消除按键抖动JNB P0.0,QILJMP START ;软件消抖后,若p0.0为1,则认为按键未按下,回到检测按键状态程序QI:clr p0.6 ;p0.6接电机R/S端,将其清零表示电机可以运行setb p0.7 ;p0.7接DIR端,为1,则与COM端断开,电机正转mov p2,#0Bh ;p2.0接CH1,p2.1接CH2,p2.2接CH3,将速度设定为2000RPM lcall XIANSHI ;显示设定速度LJMP START ;执行完启动程序后,回到检测按键状态程序;***************反转程序,也即逆时针转动***************** FANZHUAN:LCALL YANSHI ;调用延时子程序,目的:软件消除按键抖动JNB P0.1,FANLJMP START ;软件消抖后,若p0.0为1,则认为按键未按下,回到检测按键状态程序FAN:clr p2.3 ;接通BRK端,使电机急停lcall PANTING ;调用判停程序,能从判停程序中返回,说明机已停setb p2.3 ;断开BRK端,解除急停状态clr p0.7 ;接通DIR端,使电机逆时针转动lcall XIANSHI ;显示设定速度LJMP START ;执行完启动程序后,回到检测按键状态程序;*****************急停程序*********************JITING:LCALL YANSHI ;调用延时子程序,目的:软件消除按键抖动JNB P0.2,JILJMP START ;软件消抖后,若p0.0为1,则认为按键未按下,回到检测按键状态程序JI:clr p2.3 ;接通BRK端,使电机急停lcall PANTING ;调用判停程序,若能从中返回,说明电机已停LJMP START ;执行完启动程序后,回到检测按键状态程序;***************加速程序,每按一次键,加速500rpm**************** JIASU:LCALL YANSHI ;调用延时子程序,目的:软件消除按键抖动JNB P0.3,JIALJMP START ;软件消抖后,若p0.0为1,则认为按键未按下,回到检测按键状态程序JIA:mov a,p2 ;将p2的值复制到累加器a中anl a,#07h ;取ch3ch2ch1的值,并放到累加器a中jz START ;若a中值为0,则速度已经最大,不再加速,回到检测按键状态程序mov r0,p2dec r0mov p2,r0 ;加速500rpm(参考电机驱动器说明中的多段速度选择部分)lcall XIANSHI ;显示设定的速度LJMP START ;执行完启动程序后,回到检测按键状态程序;********************减速程序,每按一次键,减速500rpm**************** JIANSU:LCALL YANSHI ;调用延时子程序,目的:软件消除按键抖动JNB P0.4,JIANLJMP START ;软件消抖后,若p0.0为1,则认为按键未按下,回到检测按键状态程序JIAN:mov a,p2anl a,#07h ;取ch3ch2ch1的值cjne a,#07h,JS ;若a中数值为07h,则速度已为0,ljmp START ;若速度为0,则程序回到开始程序,不再减速,以防出错JS:mov a,P2inc amov P2,a ;减速500rpm(参考电机驱动器说明中的多段速度选择部分)lcall XIANSHI ;显示设定的速度ljmp START ;执行完启动程序后,回到检测按键状态程序;********************停止程序***********************TINGZHI:LCALL YANSHI ;调用延时子程序,目的:软件消除按键抖动JNB P0.5,TINGLJMP START ;软件消抖后,若p0.0为1,则认为按键未按下,回到检测按键状态程序TING:setb p0.6 ;p0.6接R/S端,为1,则与COM端断开lcall PANTING ;调用判停程序,若能从中返回,说明电机已停LJMP START ;执行完启动程序后,回到检测按键状态程序;*****************延时10ms,这是一个子程序,功能是延时10毫秒************* YANSHI:mov a,#0 ;对累加器a置零,延时用y:mov r1,#00h ;对寄存器r1置零,延时用inc r1cjne r1,#0ffh,y ;延时1msinc acjne a,#10,y ;延时10×1=10msret;*******判停程序,这是一个子程序,若能从判停程序中返回,则说明电机已停******** PANTING:jnb p2.4,yanshi250ms ;若speed端为0,则进入延时程序ajmp PANTING ;若speed端为1,则返回PANTING,等待speed端出现0电平yanshi250ms:clr p2.6 ;允许对计数器置数mov p3,#08h ;对计数器置入数8setb p2.6 ;计数器开始计数mov a,#0 ;对累加器a置零,延时用y250:mov r1,#00h ;对寄存器r1置零,延时用inc r1jb p2.5,PANTING ;若期間Tc为1,则电机未停,返回PANTING,继续判断cjne r1,#0ffh,y250 ;延时1msinc acjne a,#250,y250 ;延时250ms,ret;若至延时结束Tc一直不改变状态,则说明speed端口无脉冲输出,认为电机停转,程序;返回。
单片机驱动直流电机正反转程序

(1)主程序main.c#include<reg51.h>#include"ds1302.h"sbit Xianwei1=P1^0;sbit Xianwei2=P1^1;sbitMotor_A=P1^2;sbitMotor_B=P1^3;sbitMotor_EN=P1^4;unsigned char Num=0;unsigned intdisp[8]={0x3f,0x3f,0x3f,0x3f,0x3f,0x3f,0x3f,0x3f};/*//---存储顺序是秒分时日月周年,存储格式是用BCD码---//uchar TIME[7] = {0, 0, 0x12, 0x01, 0x01, 0x02, 0x13};*/void main(){uchar state=0;Motor_A=1;Motor_B=1;Motor_EN=0;Ds1302Init();while(1){Ds1302ReadTime();if((TIME[2]==0x06)&&(TIME[1])==0) //06:00{state++;if(state>2)state=1;}if(state==1){while(Xianwei1!=0){Motor_A=1; //正转Motor_B=0;Motor_EN=1;}}if(state==2){while(Xianwei2!=0){Motor_A=0; //反转Motor_B=1;Motor_EN=1;}}}}(2)ds1302.h#ifndef __DS1302_H_#define __DS1302_H_//---包含头文件---//#include<reg51.h>#include<intrins.h>//---重定义关键词---//#ifndefuchar#define uchar unsigned char#endif#ifndefuint#define uint unsigned int#endif//---定义ds1302使用的IO口---//sbit DSIO=P3^4;sbit RST=P3^5;sbit SCLK=P3^6;//---定义全局函数---//void Ds1302Write(ucharaddr, uchardat); uchar Ds1302Read(ucharaddr);void Ds1302Init();void Ds1302ReadTime();//---加入全局变量--//extern uchar TIME[7]; //加入全局变量(3)ds1302.c#include"ds1302.h"//---DS1302写入和读取时分秒的地址命令---////---秒分时日月周年最低位读写位;-------//uchar code READ_RTC_ADDR[7] = {0x81, 0x83, 0x85, 0x87, 0x89, 0x8b, 0x8d}; uchar code WRITE_RTC_ADDR[7] = {0x80, 0x82, 0x84, 0x86, 0x88, 0x8a, 0x8c};//---DS1302时钟初始化2013年1月1日星期二12点00分00秒。
51单片机控制步进电机的转动,加减速,停止,反转

51单片机控制步进电机的转动,加减速,停止,反转#includesbit inc=P3^2;sbit dec=P3^3;sbit zhzhd=P3^6;sbit fazhd=P3^7;bit flag=1;unsigned char t=0x00; //表正反速度void delay(unsigned int t);void motor_ffw();unsigned char code led7code[]={0x81,0xe7,0x92,0xc2,0xe4,0xc8,0x88,0xe3,0x00,0xc0};unsigned int num=0;unsigned char code FFW[8]={0x40,0x60,0x20,0x30,0x10,0x18,0x08,0x48}; unsigned char code FFZ[8]={0x48,0x08,0x18,0x10,0x30,0x20,0x60,0x40}; //反转void main(){EA=1;IT0=1;EX0=1;IT1=1;EX1=1;TMOD=0x06;TL0=0xff;TH0=0xff;TR0=1;ET0=1;P3=0x3f;P0=led7code[num%10];while(1){motor_ffw();}}void motor_ffw() /* 步进电机驱动*/ // {unsigned char i;int j;while(1){for(j=0;j<12;j++) //12个周期转一圈{ for (i=0; i<8; i++) //一个周期转30度{if(flag==1)P2 = FFW[i]; //取数据elseP2 = FFZ[i];delay(t); //t调节转速}}}}void int0(void) interrupt 0{EX0=0;delay(10);if(inc==0){num++;P0=led7code[num%10];if(num%10!=0&&flag){zhzhd=0;fazhd=1;} else if (num%10==0){zhzhd=0;fazhd=0;} else {zhzhd=1;fazhd=0;}switch(num%10){case 0:t=0x00;break;case 1:t=0x12;break;case 2:t=0x11;break;case 3:t=0x10;break;case 4:t=0x09;break;case 5:t=0x08;break;case 6:t=0x07;break;case 7:t=0x06;break;case 8:t=0x05;break;case 9:t=0x04;break;}}while(!inc);EX0=1;}void int1(void) interrupt 2{EX1=0;delay(10);if(dec==0){num--;if(num==65535)num=65529;P0=led7code[num%10];if(num%10!=0&&flag){zhzhd=0;fazhd=1;} else if (num%10==0){zhzhd=0;fazhd=0;} else {zhzhd=1;fazhd=0;}if(num==65535)num=65529;switch(num%10){case 0:t=0x00;break;case 1:t=0x12;break;case 2:t=0x11;break;case 3:t=0x10;break;case 4:t=0x09;break;case 5:t=0x08;break;case 6:t=0x07;break;case 7:t=0x06;break;case 8:t=0x05;break;case 9:t=0x04;break;}}while(!dec);EX1=1;}void huanx(void) interrupt 1{ET0=0;TR0=0;delay(10);if(P3^4==0){if(flag==1) {flag = 0;zhzhd=1;delay(500);fazhd=0;} else {flag = 1;fazhd=1;delay(500);zhzhd=0;}}while(!(P3^4));ET0=1;TR0=1;}// 延时程序void delay(unsigned int t){unsigned int k;while(t--){for(k=0; k<80; k++);}}。
毕业设计51单片机控制步进电机正反转的工作原理Protues仿真DXP

当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。
1.步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。
仅仅处于一种盲目的仿制阶段。
这就给户在产品选型、使用中造成许多麻烦。
签于上述情况,我们决定以广泛的感应子式步进电机为例。
叙述其基本工作原理。
望能对广大用户在选型、使用、及整机改进时有所帮助。
二、感应子式步进电机工作原理(一)反应式步进电机原理由于反应式步进电机工作原理比较简单。
下面先叙述三相反应式步进电机原理。
51单片机步进电机正反转调速1602显示

51单片机步进电机正反转调速1602显示51单片机步进电机正反转调速1602显示 - C51源代码#include //51芯片管脚定义头文件#include //内部包含延时函数 _nop_();#define uchar unsigned char#define uint unsigned int#define delayNOP(); {_nop_();_nop_();_nop_();_nop_();};uchar code FFW[8]={0xf1,0xf3,0xf2,0xf6,0xf4,0xfc,0xf8,0xf9}; uchar code REV[8]={0xf9,0xf8,0xfc,0xf4,0xf6,0xf2,0xf3,0xf1};sbit K1 = P3^2; //运行与停止sbit K2 = P3^3; //设定圈数sbit K3 = P3^4; //方向转换sbit K4 = P3^5; //速率调整sbit BEEP = P3^6; //蜂鸣器sbit LCD_RS = P2^0;sbit LCD_RW = P2^1;sbit LCD_EN = P2^2;bit on_off=0; //运行与停止标志bit direction=1; //方向标志bit rate_dr=1; //速率标志bit snum_dr=1; //圈数标志uchar code cdis1[ ] = {" STEPPING MOTOR "};uchar code cdis2[ ] = {"CONTROL PROCESS"};uchar code cdis3[ ] = {" STOP "};uchar code cdis4[ ] = {"NUM: RATE: "};uchar code cdis5[ ] = {" RUNNING "};uchar m,v=0,q=0;uint number=0,number1=0;uchar snum=10,snum1=10; //预设定圈数uchar rate=2; //预设定速率uchar data_temp,data_temP1,data_temp2;/********************************************************/ /*/* 延时t毫秒/* 11.0592MHz时钟,延时约1ms /*/********************************************************/ void delay(uint t){uchar k;while(t--){for(k=0; k<125; k++){ }}}/********************************************************/ void delayB(uchar x) //x*0.14MS{uchar i;while(x--){for (i=0; i<13; i++){ }}}/********************************************************/ void beep(){uchar j;for (j=0;j<100;j++){delayB(4);BEEP=!BEEP; //BEEP取反}BEEP=1; //关闭蜂鸣器delay(170);}/********************************************************/ /* /*检查LCD忙状态/*lcd_busy为1时,忙,等待。
51单片机步进电机正反转停止实验[1]
![51单片机步进电机正反转停止实验[1]](https://img.taocdn.com/s3/m/7536206ea45177232f60a221.png)
51单片机步进电机正反转停止实验 - C51源代码#include <reg51.h> //51芯片管脚定义头文件#include <intrins.h> //内部包含延时函数 _nop_();#define uchar unsigned char#define uint unsigned intuchar code FFW[8]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09}; //四相八拍正转编码uchar code REV[8]={0x09,0x08,0x0c,0x04,0x06,0x02,0x03,0x01}; ////四相八拍反转编码sbit K1 = P3^2; //正转sbit K2 = P3^3; //反转sbit K3 = P3^4; //停止sbit BEEP = P3^6; //蜂鸣器/********************************************************//*/* 延时t毫秒/* 11.0592MHz时钟,延时约1ms/*/********************************************************/void delay(uint t){uint k;while(t--){for(k=0; k<125; k++){ }}}/**********************************************************/void delayB(uchar x) //x*0.14MS{uchar i;while(x--){for (i=0; i<13; i++){ }}}/**********************************************************/void beep(){uchar i;for (i=0;i<100;i++){delayB(4);BEEP=!BEEP; //BEEP取反}BEEP=1; //关闭蜂鸣器}/********************************************************//*/*步进电机正转/*/********************************************************/ void motor_ffw(){uchar i;uint j;for (j=0; j<8; j++) //转1*n圈{if(K3==0){break;} //退出此循环程序for (i=0; i<8; i++) //一个周期转45度{P1 = FFW[i]; //取数据delay(2); //调节转速}}}/********************************************************/ /*/*步进电机反转/*/********************************************************/ void motor_rev(){uchar i;uint j;for (j=0; j<8; j++) //转1×n圈{if(K3==0){break;} //退出此循环程序for (i=0; i<8; i++) //一个周期转45度{P1 = REV[i]; //取数据delay(2); //调节转速}}}/******************************************************** ** 主程序**********************************************************/ main(){uchar r,N=64; //N 步进电机运转圈数while(1){if(K1==0){beep();for(r=0;r<N;r++){motor_ffw(); //电机正转if(K3==0){beep();break;} //退出此循环程序}}else if(K2==0){beep();for(r=0;r<N;r++){motor_rev(); //电机反转if(K3==0){beep();break;} //退出此循环程序}}elseP1 = 0xf0;}}/********************************************************/按实验板上的K1按键步进电机正转按实验板上的K2按键步进电机反转按实验板上的K3按键步进电机停止。
51单片机可以同时控制数码管显示时间并且电机正反转动

51单片机可以同时控制数码管显示时间并且电机正反转动我用C语言写的,用上了中断,main函数里,必须要一直执行数码管显示的那个语句,所以电机转动的语句就没办法执行了,电机是直流电机,驱动是L298N。
而设计的目的是数码管一直显示时间,同时控制电机正反转动,以及加速转动(简单的洗衣机模型),到甩干结束,数码管时间暂停,电机停止转动。
程序如下#include<reg52.h>#define uchar unsigned char#define uint unsigned intsbit dula=P2^6;sbit wela=P2^7;sbit IN1=P1^1;sbit IN2=P1^2;sbit ENA=P1^3;sbit key=P3^4;sbit stop=P3^5;int num=0,num1=0,m1=0,m2=0,s1=0,s2=0,i=0,n=0;uchar code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x40} ;//0x40在数码管上显示“-”void delay(uint a) //延时语句{uint p,q;for(p=0;p<a;p++)for(q=0;q<110;q++);}void keyscan()//键盘输入语句{if(key==0){delay(10);if(key==0)TR0=1;}if(stop==0){delay(10) ;if(stop==0)EA=~EA;}}void display(uchar m1,uchar m2, uchar s1,uchar s2)//数码管显示语句{dula=1;P0=table[m2];dula=0;wela=1;P0=0xfe; wela=0; delay(1);dula=1;P0=table[m1]; dula=0;P0=0xff; wela=1;P0=0xfd; wela=0; delay(1);dula=1;P0=table[10]; dula=0;P0=0xff; wela=1;P0=0xfb; wela=0; delay(1);dula=1;P0=table[s2]; dula=0;P0=0xff;P0=0xf7;wela=0;delay(1);dula=1;P0=table[s1];dula=0;P0=0xff;wela=1;P0=0xef;wela=0;delay(1);}void main(){TMOD=0x01;TH0=(65536-45872)/256;TL0=(65536-45872)%256;EA=1;ET0=1;while(1){keyscan();display(m1,m2,s1,s2);}for(n=0;n<50;n++) //驱动电机正反转动,以及以后加速转动等等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
51单片机电机正反转控制程序以下是一个基于51单片机的电机正反转控制程序示例:
#include <reg52.h>
sbit motorPin1 = P0^0; // 电机接口1
sbit motorPin2 = P0^1; // 电机接口2
void delay(unsigned int delayTime) {
unsigned int i, j;
for(i=delayTime; i>0; i--)
for(j=200; j>0; j--);
}
void motorClockwise() {
motorPin1 = 1; // 电机接口1为高电平
motorPin2 = 0; // 电机接口2为低电平
delay(500); // 延时一段时间
motorPin1 = 0; // 电机接口1为低电平
motorPin2 = 0; // 电机接口2为低电平
}
void motorAnticlockwise() {
motorPin1 = 0; // 电机接口1为低电平
motorPin2 = 1; // 电机接口2为高电平
delay(500); // 延时一段时间
motorPin1 = 0; // 电机接口1为低电平
motorPin2 = 0; // 电机接口2为低电平
}
void main() {
while(1) {
motorClockwise(); // 电机正转
delay(1000); // 延时一段时间
motorAnticlockwise(); // 电机反转
delay(1000); // 延时一段时间
}
}
以上代码中,我们通过定义两个sbit变量来表示电机接口1和接口2。
通过控制接口1和接口2的高低电平状态,可以控制电机的正反转。
在motorClockwise函数中,我们将接口1设置为高电平,接口2设置为低电平,电机开始正转;在motorAnticlockwise函数中,我们将接口1设置为低电平,接口2设置为高电平,电机开始反转。
通过调用延时函数,可以控制电机的转
速。
在main函数中,我们循环调用电机正反转函数,并通过延时函数设置每次正反转之间的间隔时间。