CAN测量及故障演示_图文 28页PPT文档
第五章can总线系统检修方法
对CAN进行测量时,例如:利用测试盒连接中央舒适电器控制单元,使用双通 道工作模式下进行检测。
两条CAN-BUS总线每一条线都通过一个通道进行测量。通过波形的分析可以很 容易地发现故障。由于需要单一的电压测量值,CAN的测量采用双通道测量是 必要的。CAN测量采用这形式的连接可以简单地判定“单线工作“ 故障。
当在车辆中存在电源电压过低状态时,同样也可能 (错误地) 记录为总线故障。 因此在分析总线故障之前应检查电源电压过低故障是否存储在超过两个控制单 元中。如果回答是肯定的就不用进行其他的总线故障分析了,而只在供电范围 内查询故障原因。
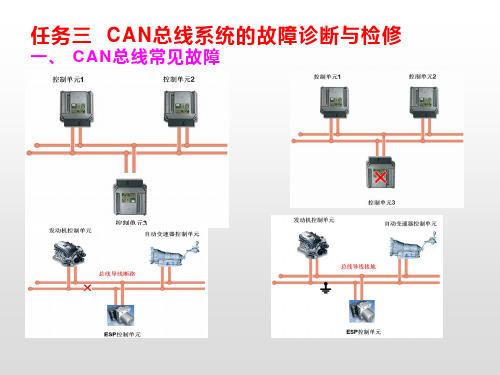
5).故障原因: CAN 总线上通信故障可能是下列原因: - .CAN Low 或 CAN High 通信线断路或者短路。 - .插头连接损坏 (触头损坏、污垢、锈蚀)。 - .车用电源系统中的故障电压 (例如由损坏的点火线圈或接地连接引起)。 - .某个控制单元中的通信部件故障。 - .某个控制单元的供电故障 (当蓄电池电量快耗尽时蓄电池电压缓慢下降可能 导致故障记录存储,因为不是所有的控制单元由于电压下降而同时关闭)。
3). 动力系统CAN-high对正极短路 CAN-high线的电压电位被置于12V.,CAN-Low线的隐性电压被置于大约12V.。 这是由于在控制单元的收发器内的CAN-high 和CAN-Low 的内部错接引起的。需 要将CAN线组(CAN-High 和 CAN-Low)从线节点处依次拔取,同时注意总线 的波形。当故障线组被取下后,的波形要恢复正常。
4.故障查询过程 一般性的查询前提: 1).对故障缺陷的检查。 2).查询故障存储。 3)检查车辆正确控制单元编码。 4)检查车辆正确电器元件匹配。 5).保险丝检查。
5.检查过程 1).用故障查询指南读取所有故障存储。 2)故障查询指南的结果(如果存在)。 3)用读取测量数据块确定故障存储记录(如果存在)。 4)用执行元件自诊断确定故障存储记录(如果存在)。 5)用检测仪确定故障存储记录。 6)用万用表进行电器检测,例如:线路通断。
CAN总线系统的故障诊断

当CAN-BUS数据总线对正极短 路时,检测到的CAN-BUS数据总线 的信号波形如图(b)所示。
当CAN-BUS数据总线中的 CAN-Low总线断路时,检测到 的CAN-BUS数据总线的信号波 形如图(b)所示。
当CAN-BUS数据总线中的 CAN-High总线断路时,检测到 的CAN-BUS数据总线的信号波 形如图(b)所示。
注意
终端电阻不是一定为大 约120Ω,而是相应的 阻值依赖于总线的结构
在总的阻值测量后,当在一 如果在拔取控制单元后显示 个带有终端电阻控制单元的 的阻值变得无穷大,那么, 插头拔下后测量的阻值没有 或者是连接中的控制单元终 发生变化,则说明系统中存 端电阻损坏,或者是到该控 在问题。这说明被拔取的控 制单元的CAN-Bus数据传输 制单元的终端电阻可能损坏 线出现故障。 或者是CAN-Bus总线出现断 路。
CAN-Low线对正极短路 • CAN-Low线的电压大约为12V、CAN-High线的电压
电位正常,汽车网络通讯系统在此故障下,变更为单线 工作状态。
CAN-High线对正极短路 • CAN-High线的电压大约为12V、CAN-Low线的电压
电位正常,汽车网络通讯系统在此故障下,变更为单线 工作状态。
同样的,CAN-Low驱动数据总线上有信号传输时,总线上的电压 值会在1.5~2.5 V之间高频波动,因此,万用表的测量值为1.5~2.5 V之 间,小于2.5 V但靠近2.5 V,如图所示。
3.总线波形的检测
检测CAN总线波形信 号时,一般采用测试仪或 示波器测量总线数据信号 的波形,例如采用双通道 的示波器进行同步波形的 测量,能够直观地观察 CAN总线系统波形信号有 无异常现象。
软件故障
即传输协议或软件 程序有缺陷或冲突,从 而使汽车CAN总线系统 通信出现混乱或无法工 作,这种故障一般会成 批出现。
项目三 大众车系车载网络系统以及故障诊断与检修 (任务三 CAN总线系统的故障诊断与检修)
(2)CAN 总线导线的维修 • CAN 导线修复连接见图3-24,应注意:绞合只可解开最长
50 mm • CAN 导线断开处要与下一个压接节点相距至少 100 mm
• 图3-24 CAN节点修复示意图
4) CAN总线终端电阻检测 在控制单元内装置的不是一个固定阻值的终端电阻。它是由很 多个被测量的电阻组合在一起被称为终端电阻。作为标准值或 者试验值两个终端电阻每一个以120欧姆为起始。总的阻值依赖 于车辆的总线结构,所以终端电阻是根据车型设计的。
• 故障排除:用新的CAN总线网络控制单元换掉坏单元后,汽 车后雨刮电机能被正常控制。
• 故障分析:由于CAN网络控制单元坏了,发出的异常控制信 号从而导致后雨刮电机失控。
本讲结束
谢谢!
由此看来问题只出在J519上,而网关系统又在组合仪表内, 于是更换组合仪表,再用VAS5051对舒适系统CAN数据线进 行波形分析,其波形如图3-29所示,变成双线运行的波形(正 常波形),说明此故障出在J519上。
(4)POLO后雨刮器不停故障诊断 1)故障现象描述 大众POLO 1.4L手动挡轿车,用户描述车辆在启动发动机或打 开点火开关时,后雨刮器电机就会转动,调整雨刮开关的挡位 无变化。要停止雨刮器电机,只有拔下雨刮器的熔丝或关闭点 火开关。
(3)宝来轿车仪表损坏导致遥控器有时失效 1)故障现象描述 宝来1. 8 L轿车;用遥控器开或锁车门时有时不起作用。 2)故障诊断与排除
图3-28 CAN-Low线信号波形 图3-29更换组合仪表后CAN数据线信号波形图
于是用VAS5051对舒适系统CAN线进行波形分析,发现 CAN-Low线波形不正确,其波形如图3-28所示。
1)CAN 总线上通信故障可能原因 - CAN Low (低速) 或 CAN High (高速) 通信线断路或者短路 - 插头连接损坏 (触头损坏、污垢、锈蚀); - 车用电源系统中的故障电压 (例如由损坏的点火线圈或接地 连接引起); - 某个控制单元中的通信部件故障; - 某个控制单元的供电故障 (当蓄电池电量快耗尽时蓄电池电 压缓慢下降可能导 致故障记录存储,因为不是所有的控制单元由于电压下降而同 时关闭); - 车辆中的总线系统不仅会遭受短路,而且当水汽侵入时可能 造成绝缘受损,例如 在接地、正极和 CAN 导线之间出现接触电阻。 - CAN的所有故障通常被存储在故障代码存储器中。然而故障 记录仅在个别情况下 允许简单的诊断。绝大多数时候必须进行详细的检查。
CAN总线故障案例ppt课件
地,汽车的CAN总线网络便可以分成两个通讯网络: - 低速网 通讯速度不大于125K bps,目前常用的在100K bps,主要用于中央门
锁,自动门窗,自动空调,汽车定位等舒适系统。 - 高速网 通讯速度可达1M bps,目前常用的在500K bps,主要用于汽车动力控
在总线仲裁中失败的单元,会 自动返回到等待状态,一旦总线空
闲时再次重复发送传输请求。
.
二、车载CAN总线与多路信息传输系统简要介绍
相关介绍: CAN 总线数据格式
采用数据帧格式向总线可传送每一 帧低于130位的数据。
采用这种方式可以使下一次有可能 非常紧急的数据传输排队等待时间最短 。
每段数据包含有不同内容的数据区 。
汽车维修案例
总线通讯错误致发动机无法起动的
故障案例分析
.
一、车型故障资料
故障车型情况
一辆2004年款帕萨特B5 1.8T轿车,行驶6万公 里,使用期2年。该车在高速公路行驶时发生交通事 故,事故处理持续了3个多月时间,处理完毕后将事 故车拉到定点汽车修理厂进行碰撞修复工作。修复 后,发现发动机无法正常运行,在发动机起动2秒钟 后就自动熄火。这种现象很象防盗报警系统启动了, 但是防盗报警灯却始终没有点亮,也无法重新对防 盗系统进行匹配。车主反映事故发生后发动机是能 够起动运行的,现在事故修好了,发动机倒不能起 动了,于是产生维修纠纷。.
LIN – 通讯在醒来的舒适系统CAN有效。在通讯断开时 (拔下插头 , 通讯参与者的供电断路) 主控制单元里产生一个故. 障存储!
二、车载CAN总线与多路信息传输系统简要介绍
LIN总线:驱动器物理结构
bcucan通信故障检测方法
bcucan通信故障检测方法
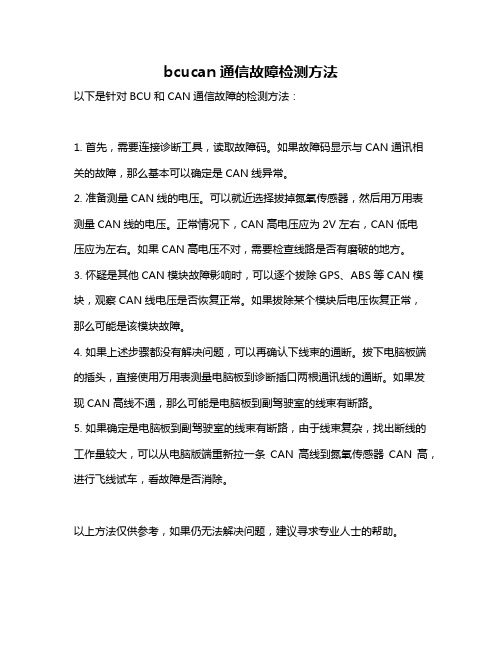
以下是针对BCU和CAN通信故障的检测方法:
1. 首先,需要连接诊断工具,读取故障码。
如果故障码显示与CAN通讯相关的故障,那么基本可以确定是CAN线异常。
2. 准备测量CAN线的电压。
可以就近选择拔掉氮氧传感器,然后用万用表测量CAN线的电压。
正常情况下,CAN高电压应为2V左右,CAN低电
压应为左右。
如果CAN高电压不对,需要检查线路是否有磨破的地方。
3. 怀疑是其他CAN模块故障影响时,可以逐个拔除GPS、ABS等CAN模块,观察CAN线电压是否恢复正常。
如果拔除某个模块后电压恢复正常,
那么可能是该模块故障。
4. 如果上述步骤都没有解决问题,可以再确认下线束的通断。
拔下电脑板端的插头,直接使用万用表测量电脑板到诊断插口两根通讯线的通断。
如果发现CAN高线不通,那么可能是电脑板到副驾驶室的线束有断路。
5. 如果确定是电脑板到副驾驶室的线束有断路,由于线束复杂,找出断线的工作量较大,可以从电脑版端重新拉一条CAN高线到氮氧传感器CAN高,进行飞线试车,看故障是否消除。
以上方法仅供参考,如果仍无法解决问题,建议寻求专业人士的帮助。
汽车电控系统诊断与调试课件-学习目标2:能够掌握CAN总线的特性、组成、数据传输原理、故障检测维修

汽车电控系统诊断与调试
汽车电控系统诊断与调试
使用示波器测量CAN总线波形时,首先需要设置参数,点击电脑界面上的通道A 后,左下角选择DOS1,点击电脑界面上的通道B,左下角选择DOS2,即可完成 参数设置。
汽车电控系统诊断与调试
完成参数设置后,将示波器的两支黑表笔搭铁,之后将连接DOS1的红表笔接在 CAN-High线端口上,连接DOS2的红表笔接在CAN-Low线端口上。示波器显 示界面会显示被测CAN总线的电压波形。
汽车电控系统诊断与调试
CAN-BUS采用串行数据传递、单根双绞线传输的方式,如果有多个控制器 需要同时发出信号,那样势必会在CAN数据总线上发生数据冲突,因此 CAN-BUS对于每一个信息数据列都规定了优先级。
汽车电控系统诊断与调试
当其他控制器发送的信息优先级高于自己控制器发送的信息时,将通知自己的收 发器停止发送,整个控制器进入接收状态。例如自动换挡要求减油门,巡航控制 同时要求增油,而ASR则要求减油门以维持驱动轴的低扭矩,经过仲裁后,换挡 优先,其他的控制器及其CAN收发器暂停发送信号,改为接收状态。
汽车电控系统诊断与调试
2.CAN总线电压的检测 检测CAN总线波形信号时,一般采用测试仪或示波器测量总线数据信号的波形,采 用双通道的示波器进行同步波形的测量,能够直观地观察CAN总线系统波形信号有 无异常现象。
汽车电控系统诊断与调试
在测试仪DSO功能下分析CAN总线的电压波形时,应注意准确调整DSO的 时间值、电压值和触发信号。另外,对于一些主流车系,需要配套使用检测 盒,从而避免直接在CAN总线上寻找测量点。
汽车电控系统诊断与调试
CAN数据总线在极短的时间里,在各控制单元之间传递数据。CAN数据总线 的数据由开始域、状态域、检查域、数据域、安全域、确认域、结束域7部 分组成。
CAN总线故障检测

dominant state
3.8 V
recessive state
2.6 V
CAN Low
Differenc e
1.1 V 2.7 V = 0
2.4 V 0.2 V = 1
差值> 2.3 V = result bit value 0 = dominant
差值 < 2.3 V = result bit value 1 = recessive
state
CAN High 4V (>3.6)
0V
CAN Low 1V (<1.4)
5V
Difference 3V=0 -5V=1
CAN Low recessive 1
CAN High recessive 1
CAN High dominant 0
CAN Low dominant 0
Difference > 2.2 V = result bit value 0 = dominant
Difference < 2.2 V = result bit value 1 = recessive
Both signals are always measured against earth
高速CAN总线容错能力
高速C A N网物理层,由于其内部结构的限制,不能提供容错方法。因为 高速C A N网的比较电路很简单,如果出现故障,比较器不会发送信号, 也没有办法实现通信。以下七种情况中,仅有两种情况在物理层容错范围 内,其他几种情况,网络是不能运行的,并且各个电控单元之间也不可以 实现通信。
装有CAN总线系统的车辆出现故障,维修人员应首先检查CAN总线系统是否正常 。因为CAN总线系统有故障,则整个汽车CAN总线系统中的有些信息无法传输,造 成接收这些信息的电控系统无法正常工作,使故障诊断变得更为困难。
基于CAN总线的挖掘机铲斗轨迹规划与控制(答辩) 共28页PPT资料
个
问
题
运动学分析
铲斗工作装置的D-H坐标系简图
运动学正问题
运动学逆问题
x a3c123 a2c12 a1c1 a0 y 0 z a3s123 a2s12 a1s1 d0
1 2 3
1B EA2 B A2E 2AA BC E O 1 S 2IF C2 IC2 F 2 CC IcF o s 3JK J2L L2K 2 JL LK co JsL
如果设定机械的所有 连杆机构参数,则可 以便捷简单的推出它 的所有坐标系或是执 行机构末端的所有向 量在随便一个坐标系 的姿态与位置。
只要给出了铲斗的 位置与姿态,即关 节角的大小,便可 得知动臂,斗杆和 铲斗油缸此时的长 度
各机构油缸长度与关节交的关系
油缸长度和动 臂关节角的关系
油缸长度和铲斗杆 关节角的关系
易于开发
CAN总线在汽车电 子、工业控制、电
力系统应用广泛
具有极高的 稳定性。
iCAN协议
以ISO/OSI结构的角度来看,CAN总线仅仅定义了第一层 (物理层)和第二层(数据链路层)。
由于 CAN 总线底层协议没有规定应用层,本身并不完整; 在基于 CAN-bus 的分布式控制系统中,有些附加功能(网络 的启动及监控,网络中 CAN 节点的标识和故障识别等)需要 一个高层协议来实现。
控制系统框图
三、铲斗轨迹规划
液压挖掘机在作业中最 多的工作任务是夯实与 平整土壤、沿坡面挖掘 与基坑挖掘等。这些工 作模式均存在特定规律, 能够做到相应的轨迹规 划。依照挖掘工作要求 测算出希望的铲斗运行 轨迹就是轨迹规划,这 是达到工作装置运动操 控的基础。
轨迹规划模式重点是在 D-H法基础上构建其运动 学模型,依照早先规划 的轨迹对铲斗齿尖的位 姿展开运动学逆运算, 推算出铲斗尖位姿与每 一关节变量的联系,给 它的运行轨迹的控制与 规划提供了方法与依据 。
CAN错误识别及处理标准版文档

ቤተ መጻሕፍቲ ባይዱ
CAN错误处理
3.CAN错误处理
某个CAN节点识别到的每个错误都立即通过一 条错误信息(错误帧)提供给所有其他节点。因 此 所有总线设备不再将此前接收的信息继续发送给应用程序微控制器。在此通过自动重复传输有 错误的信息来校正错误。
CAN错误处理
3.CAN错误处理 ■ 错如将或误果这硬主一个件动个或复与或这位错多些,误个设才被总备能动线与撤状设总消态备 线 总之线多 完间关次 全的闭干 断过状扰 开渡态系 。通。统 在过且 这C发 种A送 总N错 线控误 关制或 闭器接状自收态动错下实误,现的这。错些只误控有计制通数单过器元相达无应到法的规发操定送作限或,值接例,收如就信软会息件。 在《所识 因因如数接接■识此此数 在每仲识在因 每《因因仲识识接数每在因数发在监发此总发别此此果据触触别外外据个裁别此此个总此此裁别别触据个此此据送此视送错通 线 送 到C一 格 不 不 到 接 接 格通 C字 到 通 ,C线 , 字 到 到 不 格 C通 C格 器 通 到 器所误所AAAAA过与的5个式良良5收收式 过段5过第 与第段55良式过式在过总在有主有NNNNN个 个个个个自诊校或损、、器器损 自(自一 诊一(、损自损确自线确可 节 节 节 可总动总以 以以以以动断验多坏短短还还坏 动同动级 断级同短坏动坏认动发认以点点点以线与线上 上上上上重系码个,路路检检, 重时重复 系复时路,重,时重送时识发发发识设错设连 连连连连复统和总例、、查查例 复多复位 统位多、例复例段复出段别送送送别备误备续 续续续续传》与线如软软总总如 传次传后 》后次软如传如中传的中出信信信出不被不相 相相相相输课计设未件件线线未 输读输触 课触读件未输未没输比没五息息息五再动再同同 同 同 同有程算备将错错信信将有取有发程发取错将有将有有特有种的的的种将状将的 的的的的错出多误误号号错时错错 错时误错接错接接CCCC类同同同类此态此比 比比比比RRRR误的次或或的误覆误误 误覆或误收误收收型时时时型前之前CCCC特 特特特特的校干者者逻逻的盖的标 标盖者的到的时到的监监监的定定 定定接间接。 。。。。信验扰外外辑辑信隐信志 志隐外信低信逻低错测测测错界界 界界收的收息码系部部性性息性息的 的性部息位息辑位误总总总误符符 符符的过的来不统强强。。来比来比强来启来值启CC。线线线。识识 识识信渡信AA校一且电电校特校特电校用校与用电电电别别 别别息通息NN正致发磁磁正)正)磁正(正发(平平平节 节为为 为为继过继错。送场场错和错和场错显错送显,,,点 点隐隐 隐隐续续C误错可可误确误确可误误时A只只性性 性性发发性 性此此此N。误能能。认。认能。。不允 允比比 比比送送))时时时控或会会时时会一许 许特特 特特给给比比会会会制接引引段段引致发 发。。 。。应应特特立立立器收起起((起。送 送用用,,即即即自错数数通通数由 由程程也也识识识动误据据过过据高 高序序就就别别别实的传传另另传位 位微微是是出出出现错输输一一输启 启控控说说所所所。误时时个个时用 用制制其其发发发计的的总总的( (器器他他送送送数错错线线错隐 隐。。总总比比比器误误设设误性 性线线特特特达。。备备。) )设设与与与到的的比 比备备所所所规接接特 特未未接接接定收收组 组将将收收收限确确成 成信信比比比值认认的 的息息特特特,覆覆被 被识识是是是就盖盖动 动别别否否否会由由错 错为为一一一发 发误 误正正将致致致送送标 标确确这。。。器器志 志。。个设设。 。或置置这的的些隐隐设性性备比比与特特总))线除除完外外全。。断开。
五合一电机控制器功能介绍及应用PPT学习教案
ERR008
缓冲电阻故 障
1、频繁上下电 2、频繁报欠压故障 监控故障码130,1,8/ 131,1,8
1、避免频繁上下电 2、解决欠压问题
ERR009 欠压故障
1、母线电压偏低 监控故障码130,1,9/ 131,1,9 ;38,1,12
1、母线电压低于270V,后启动发电
ERR014
控制器过温
1、控制器温度过高 监控故障码130,1,14/ 131,1,14;38,1,29
调
Vd:每3秒电压下降值,要求1V≤Vd≤2V;
2) 电压逐渐上升或每3秒下降幅度小于1V,则向
试
下调整电角度值;
标 3) 电压每3秒下降幅度大于2V,则向上调整电角
准
度值;
4) 电角度调试完成后,必须将调试键盘接口盖帽
拧紧,并恢复电池端快断器;
第17页/共30页
电角度调整相关操作码:b0-02;C4-10 b0-02:电机控制器控制方式,0-面板控,2-CAN控; C4-10:电机电角度值,主电机290左右,发电机90左右; 修改方法: 电角度调整一般指的是调整驱动电机的电角度。 若电角度不满足以上标准或偏差过大,引起过压或欠压故 障(并不是所有过压和欠压都是电角度原因引起),则需 调整。 1)停车,将b0-02,由2改为0,按ENTER,再按STOP键; 2)参照以上标准调整C4-10,调整完成后,按ENTER; 3)将b0-02,再由0改为2,按ENTER键,完成一次调整。
须下总火,不下总火则DC-DC的线束正是带电的 ,与车身相碰会造成短路; 5)控制器接线盒内高压线束OT端子锁紧力矩25N.m; 6)电机接线盒内高压线束OT端子锁紧力矩20N.m;
第28页/共30页
动力CAN与舒适CAN
2-3 动力CAN总线系统的检测
三、动力CAN波形分析 1、正常波形
CAN-H:2.6 V CAN-L : 2.4 V
第三十四页,编辑于星期日:三点 三分。
2-3 动力CAN总线系统的检测
三、动力CAN波形分析 2、CAN-H与CAN-L短路
CAN-H :2.5V
节点n
?
第九页,编辑于星期日:三点 三分。
2-1 CAN总线系统的结构原理分析
二、 CAN总线硬件组成、通信原理
3. 节点的ID号
➢实时性要求越高:ID号越小,优先级越高。 ➢原理 :多个节点同时向总线发送数据时,总线上的结果是多个 数据的“逻辑与”值。
如: 节点A发送0,节点B发送1,总线上结果是0&1=0。
③将上一控制单元的插头插下,拔下一个带终端电阻的 控制单元的插头拔下,检测阻值大约为120
分析:带有终端电阻的两个控制单元是连接相通的,测量 的结果是每一个终端电阻大约为120,总的阻值为60,通
过该测量可以得出判断,连接电阻是正常的。
第三十一页,编辑于星期日:三点 三分。
大众车系使用的是分配式电阻,即发动机控制单元内的“中央 末端电阻”(66Ω)和其他控制单元内的高欧姆电阻(2.6KΩ)
2 动力CAN总线系统故障诊断与检修
任务要求:
1.了解汽车总线的产生、发展及类型; 2.理解CAN总线的组成、通信原理、特点; 3.熟悉动力CAN总线系统的功用及结构组成;
4.能查找动力CAN总线系统; 5.能识读和分析动力CAN总线系统电路图; 6.能根据相关资料确定动力CAN总线的技术参数;
7.能正确分析动力CAN总线系统故障的原因及确定故障部位;
CAN总线故障检查方法
C A N总线故障检查方法 Last updated on the afternoon of January 3, 2021一、C A N总线简介CAN总线即控制器局域网,为串行通信协议,能有效的支持具有很高安全等级的分布实时控制,在汽车电子行业中,使用CAN连接发动机控制单元,传感器,防刹车系统等等,其传输速度可达到1Mbit/S。
1、CAN总线数据生成CAN总线的数据分为模拟信号与数字信号,模拟信号是由传感器检测得到,并将得到的信号进行转换(A/D),变成数字信号,送给MCU,由MCU将生成的CAN报文发送到总线上。
模拟信号一般显示在指针表上,如气压1,气压2等。
数字信号相对简单,可直接由MCU接收,然后将报文发到CAN总线上,如发动机诊断,刹车片磨损等等,一般显示在仪表上。
2、CAN信号线CAN传输的两条信号线被称为CAN_H和CAN_L。
通电状态:CAN_H ()、CAN_L()或CAN_L()、CAN_H()断电状态:CAN_H、CAN_L之间应该有60~62欧电阻值,两个120欧分别在仪表模块和后控模块中,并联后是60欧姆左右。
友情提示:用万用表是测不准CAN_H或CAN_L电压的,因为通电后CAN线上的电压在不停变化,而万用表的响应速度很慢,所以测得的电压是并不是当前电压而是电压的有效值。
3、唤醒线WAKEUPCAN总线所有模块都有两个WAKEUP引脚,模块内部是连接在一起的,前控模块为WAKEUP输出,其它模块为WAKEUP的输入,连线时总线各模块的WAKEUP都必须与前控连接在一起,当前控电源正常、钥匙1档(ACC档)开时,前控正常工作,WAKEUP输出(输出电压值约等于当前电源电压),总线其它模块收到WAKEUP信号,模块被唤醒,在电源正常的情况下,各模块开始工作。
二、线路和模块的基本检查1、线路的基本检查分为输入和输出线路。
对输入线路的检查:首先,要找到输入的管脚(各种车的管脚定义不同);然后将输入的管脚与模块断开;最后对线路是否有信号输入进行检查。