客车侧倾与横摆动力学稳定集成控制系统(续1)
客车侧倾与横摆动力学稳定集成控制系统(续2)
< x <I x
故此 时 可认 为侧 倾 动 力学 与 横摆 动 力 学 的耦合 关 系不 足 以影 响侧 倾运 动 , 设计 控制 器 时 , 在 可将 式 ( ) 7 左 边 部分 忽 略 ,则 原 式 ( ) 的侧 倾 运 动 方 程 即简 化 1
( ) 计 算得 到 ,而 , 由摩擦 椭 圆 ,即式 ( )计算 得 到 。 7 可 6
模型 过于 复 杂 ,必 须在 一 定 的假 设情 况 下进 行 简化 。
针 对 系 统 的控 制 设 计 ,在 一 定 的范 围 内,对 式 ( ) 1 所 阐述 的 4 DO - F动 力 学模 型进 行线 性 化处 理 , 即: 1 若 客 车 的 , , 等 均 在 ±2 ) 0。 以 内, 则
假 设 客车 在 行驶 时 的 较 小 ,可忽 略 不计 ,即前 后 轮 的线 速 度 与客 车 的纵 向速 度 相等 。
成二 阶线 性模 型 。
3 )在 进 行 客 车 仿 真 时 , 可 用 Ma i F r l 计 gc omua 算轮 胎 力 。而在 进 行系 统 控制 设 计 时 ,须利 用 线性 化 模 型计算 轮 胎力 ,即轮 胎 的横 向力在 侧 偏角 较 小 时与 其 成 线性 关 系 ,可表 示 为 :
式中:
N ・ r d。 m/ a
J
—— 悬 挂 质 量 在 侧 倾 方 向的弹 性 刚度,
车 侧倾 运 动 为例 , 当 与 较 小 时 ,则 :
式 ( )所 示 的简化 模 型 中 ,轮胎 的 可 由式 ( ) 9 8
( 一I )i c s , z s q o z n)
s 0 0 o0 1( i ,c s n 0可表 示 , , 等 ) ;
车辆系统动力学复习重点

车辆系统动⼒学复习重点1.系统动⼒学研究内容及发展趋势研究内容长期以来,⼈们⼀直在很⼤程度上习惯按纵向、垂向和横向分别独⽴研究车辆动⼒学问题;⽽实际中的车辆同时会受到三个⽅向的输⼊,各⽅向所表现的运动响应特性必然是相互作⽤、相互耦合的.纵向动⼒学:纵向动⼒学研究车辆直线运动及其控制的问题,主要是车辆沿前进⽅向的受⼒与其运动的关系。
按车辆⼯况的不同,可分为驱动动⼒学和制动动⼒学两⼤部分。
⾏驶动⼒学:主要是研究由路⾯的不平激励,通过悬架和轮胎垂向⼒引起的车⾝跳动和俯仰以及车辆的运动。
操纵动⼒学:主要研究车辆的操纵特性,主要与轮胎侧向⼒有关,并由此引起车辆侧滑、横摆和侧倾运动。
操纵动⼒学的研究范围分为三个区域:线性域:侧向加速度越⼩于0.4kg时,通常意味着车辆在⾼附着路⾯做⼩转向运动;⾮线性域:在超过线性域且⼩于极限侧向加速度(约为0.8kg)范围内;⾮线性联合⼯况:通常指车辆在转弯制动或转弯加速时的情况。
发展趋势:(1)车辆主动控制:ABS,TCS等逐步向车⾝侧倾控制,可切换阻尼的半主动悬架和四轮底盘控制系统的集成,转向等当⾯扩展。
通过控制算法、传感器技术和执⾏机构的开发实现的⾃动调节。
(2)车辆多体运动动⼒学:车辆的多刚体模型逐步向多柔体模型发型。
可以准确分析虚拟样机的性能,检查虚拟样机的缺陷从⽽缩短产品的设计周期,节约试制费⽤,同时提⾼物理样机与最终产品之间的相似性。
(3)“⼈—车—路”闭环系统:充分考虑驾驶员模型以及车辆本⾝的⼀些动⼒学问题来提⾼汽车稳定性。
2.轮胎滚动阻⼒概念及其分类:概念:当充⽓的轮胎在理想路⾯(通常指平坦的⼲、硬路⾯)上直线滚动时,其外缘中⼼对称⾯与车轮滚动⽅向⼀致,所受到的滚动⽅向相反的阻⼒。
分类:弹性迟滞阻⼒、摩擦阻⼒和风扇效应阻⼒。
3.什么是滚动阻⼒系数?影响因素有哪些?其值等于相应载荷作⽤下滚动阻⼒F R与车轮垂直载荷F X的⽐值。
影响因素:车轮载荷(反⽐)、胎压(反⽐)、车速(正⽐,先缓慢增加,再明显增加)、轮胎的结构设计、嵌⼊材料和橡胶混合物的选⽤。
汽车系统动力学习题答案
汽车系统动⼒学习题答案1.汽车系统动⼒学发展趋势随着汽车⼯业的飞速发展,⼈们对汽车的舒适性、可靠性以及安全性也提出越来越⾼的要求,这些要求的实现都与汽车系统动⼒学相关。
汽车系统动⼒学是研究所有与汽车系统运动有关的学科,它涉及的范围较⼴,除了影响车辆纵向运动及其⼦系统的动⼒学响应,还有车辆在垂向和横向两个⽅⾯的动⼒学内容,随着多体动⼒学的发展及计算机技术的发展,使汽车系统动⼒学成为汽车CAE技术的重要组成部分,并逐渐朝着与电⼦和液压控制、有限元分析技术集成的⽅向发展,主要有三个⼤的发展⽅向:(1)车辆主动控制车辆控制系统的构成都将包括三⼤组成部分,即控制算法、传感器技术和执⾏机构的开发。
⽽控制系统的关键,控制律则需要控制理论与车辆动⼒学的紧密结合。
(2)多体系统动⼒学多体系统动⼒学的基本⽅法是,⾸先对⼀个由不同质量和⼏何尺⼨组成的系统施加⼀些不同类型的连接元件,从⽽建⽴起⼀个具有合适⾃由度的模型;然后,软件包会⾃动产⽣相应的时域⾮线性⽅程,并在给定的系统输⼊下进⾏求解。
汽车是⼀个⾮常庞⼤的⾮线性系统,其动⼒学的分析研究需要依靠多体动⼒学的辅助。
(3)“⼈—车—路”闭环系统和主观与客观的评价采⽤⼈—车闭环系统是未来汽车系统动⼒学研究的趋势。
作为驾驶者,⼈既起着控制器的作⽤,⼜是汽车系统品质的最终评价者。
假如表达驾驶员驾驶特性的驾驶员模型问题得到解决后,“开环评价”与“闭环评价”的价值差别也许就不存在了。
因此,在⼈—车闭环系统中的驾驶员模型研究,也是今后汽车系统动⼒学研究的难题和挑战之⼀。
除驾驶员模型的不确定因素外,就车辆本⾝的⼀些动⼒学问题也未必能完全通过建模来解决。
⽬前,⼈们对车辆性能的客观测量和主观之间的复杂关系还缺乏了解,⽽车辆的最终⽤户是⼈。
因此,对车辆系统动⼒学研究者⽽⾔,今后⼀个重要的研究领域可能会是对主观评价与客观评价关系的认识2.⽬前汽车系统动⼒学的研究现状汽车系统动⼒学研究内容范围很⼴,包括车辆纵向运动及其⼦系统的动⼒学响应,还有车辆垂向和横向动⼒学内容。
基于TruckSim的重型清障车操纵稳定性分析
基于TruckSim的重型清障车操纵稳定性分析董志圣;田国富;王涛;刘宏利【摘要】国内清障车主要使用的是载货汽车的二类汽车底盘,这种底盘在整车的结构布置和承力方式上有许多不满足清障车专用作业装置的布置需求.本文以重型清障车的操纵稳定性为研究目标,基于TruckSim软件建立某款重型清障车工程样车的整车模型,参照《GB/T 6323-2014汽车操纵稳定性试验方法》对汽车进行稳定性仿真试验,选取不同质心高度和质心纵向位移进行开环评价和闭环评价对比分析.结果表明在原设计参数的基础上降低车辆的质心高度和前移质心纵向位移,对车辆的操纵稳定性具有一定的提高.【期刊名称】《交通节能与环保》【年(卷),期】2019(015)002【总页数】5页(P21-25)【关键词】重型清障车操纵稳定性TruckSim仿真质心位置【作者】董志圣;田国富;王涛;刘宏利【作者单位】沈阳工业大学,辽宁沈阳 110870;交通运输部公路科学研究院,北京100088;沈阳工业大学,辽宁沈阳 110870;沈阳工业大学,辽宁沈阳 110870;交通运输部公路科学研究院,北京 100088【正文语种】中文【中图分类】U469.60 引言清障车是用于清理交通事故引起的故障车辆、保障道路快速通畅的汽车。
清障车通常由专用底盘、专用作业装置、作业附件组成。
清障车作为专项作业车,不仅要保障清障作业过程中的安全,也要保障自身的行驶安全。
目前我国清障车所选的底盘并非真正意义上的专用底盘,主要是采用载货汽车的二类汽车底盘,这种底盘在整车的结构布置和承力方式上有许多不满足清障车专用作业装置的布置需求[1]。
在加装作业装置后,质心发生变化导致整车的操纵稳定性发生变化,同时使得车辆行驶和作业的安全性受到影响。
针对这一问题,本文以某一款31吨的重型清障车为研究参照对象,通过TruckSim仿真软件建立整车动力学模型,参照国家标准《GB/T 6323-2014汽车操纵稳定性试验方法》对汽车进行稳定性仿真试验,从开环评价及闭环评价的角度,通过仿真车辆的工作状态,并对清障车稳定性影响较大的参数进行对比,为重型清障车上装的安装提供参考。
汽车底盘集成控制系统组成和工作原理分析-副本
自从20世纪80年代以来,为了提高汽车性能,人们开发了各种各样的底盘主动控制系统。
这些系统按汽车运动方向可以分为3类:纵向的制动和驱动控制、横向的转向和横摆力矩控制以及垂直的悬架控制。
目前汽车底盘的电子控制系统几乎毫无例外地围绕某一功能来开发,并通过轮胎与地面间的接触力产生作用。
由于汽车各个方向的运动并非独立,而是相互联系,相互影响,因此具有以下特征:(1)各个控制系统的控制目标不一致,如主动悬架的主要控制目标是舒适性,四轮转向的主要控制目标是操纵稳定性,将两者集成时会由于控制目标不一致而冲突;(2)各个控制系统对执行器的控制存在干涉,如制动器同时受到驾驶员、防抱死系统ABS和电子稳定程序ESP 等的控制;⑶同一控制目制可以由多个控制系统完成,如转向时的操纵稳定性可以由主动前轮转向AFS、主动后轮转向ARS和ESP等来实现。
此外还存在基于反馈的控制存在时间和相位的滞后,系统的冗余度较大,尤其是传感器冗余。
底盘集成控制是当前底盘的研发热点,因为它有着传统控制无法比拟的优点,具体如下。
(1)消除各系统间的冲突如四轮转向可以改变汽车的横向运动,同样通过制动力控制也可以改变汽车的横向运动,集成控制能实现两个系统各自以合适的幅度向同一个方向作用,消除可能存在的冲突。
(2)改善车辆性能如在装有ABS的车辆上若安装形式为“高选择”则在分离附着系数路面上会产生横摆力矩,导致车辆失稳;若安装形式为“低选择”又没有充分利用路面附着系数导致制动距离延长。
通过ABS和4WS的集成控制既能充分利用路面附着系数,缩短制动距离,又能保证车辆稳定性。
(3)减少传感器很多控制系统所需要的传感器信号是相同的,可以通过集成实现传感器共享,还可以充分利用状态估计等方法来估计一些车辆的状态参数,减少传感器的数量,降低控制系统的成本。
(4)降低系统复杂性。
随着底盘电控系统数量的不断增加,控制器、传感器和执行器都大大增多,造成电子线路复杂,布局混乱, 成本上升,还造成检修和维护的困难。
电子稳定控制系统中横摆与侧翻控制综述
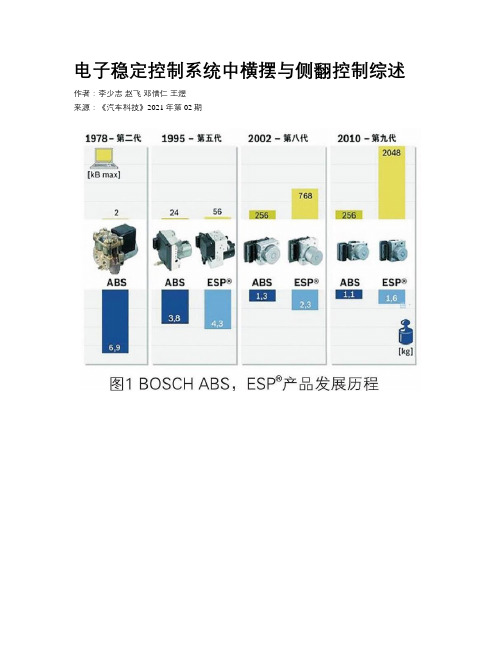
电子稳定控制系统中横摆与侧翻控制综述作者:李少志赵飞邓惜仁王煜来源:《汽车科技》2021年第02期摘要:电子稳定控制系统(以下简称稳定控制系统)是当下乘用车装备较为普遍的主动安全控制系统,基础的稳定控制系统主要监控车辆的横摆,当目标横摆与实际横摆的差值的绝对值大于横摆门限时系统激活,通过制动将车辆的横摆控制在驾驶员可接受范围内,从而修正车辆的过度和不足转向。
但对于静态稳定系数较小、悬架调教偏向舒适性的SUV车辆,在极限工况下,基础的系统仅能修正车辆横摆但不能抑制侧翻,因此需要增加防侧翻功能。
防侧翻功能主要监控方向盘转角的速率、横向加速度的变化率、横摆角速度变化率等。
防侧翻功能依据摩擦圆原理,通过增大轮胎与地面之间的纵向力来削弱横向力,进而削弱横向加速度,最终实现抑制车辆侧翻。
关键词:车身电子稳定控制系统;横摆稳定性;防侧翻功能;静态稳定系数;摩擦圆中图分类号:U467.1+1 文献标识码:A 文章编号:1005-2550(2021)02-0096-08Abstract: Electronic Stability Control System (hereinafter referred as ESC) is widely used in vehicle active safety control system,base ESC monitors vehicle’ s yaw rate. When the absolute value of the difference between target yaw rate and actual yaw rate exceed the threshold, yaw rate stability control active. Independently modifying the 4-wheels’ brake p ressures to control the yaw rate within the driver acceptable range, amending over-steering and under-steering tendency. For vehicle with small SSF (Static Stability Factor) and soft suspension, base ESC can only amend yaw rate but without mitigate roll-over in critical dynamic situation. So RMI (Roll Movement Intervention)function needs added to lower the roll-over risk. RMI mainly monitoring steering wheel angle (hereinafter referred as SAS) gradient, lateral acceleration (hereinafter referred as Ay)gradient, yaw rate (hereinafter referred as YR) gradient, etc. RMI control logic is based on Kamm circle, by increasing longitudinal force (hereinafter referred as Fx) to decrease lateral force (hereinafter referred as Fy), then decrease Ay, finally mitigate the roll angle and lower the roll-over risk.Key Words: Electronic Stability Control; Yaw Rate Stability; Roll Movement Intervention; static Stability Factor; Kamm Circle前言在濕滑的道路行使时,如果遇到突发情况需要进行紧急避让,在ESP®问世之前,普通驾驶员往往很难在如此工况下保证车辆的行使稳定性,通常车辆会失控冲出铺装路面翻到沟里或不可避免地撞上障碍物,同时带来严重的人身伤亡[2]。
客车动态侧倾稳定性的测试方法研究
t h e e n t e r pr i s e t o f u r t h e r i mp r o v e t he c o a c h a c t i v e s a f e t y d e s i g n.
Ke y wo r ds :c o a c h ; d y n a mi c r o l l s t a b i l i t y ; t e s t me t h o d
文章编号 : 1 0 0 6 — 3 3 3 1 ( 2 0 1 3 ) 0 6 — 0 0 4 5 — 0 3
S t ud y o n Te s t Me t h e d a b o ut Co a c h Dy na mi c RO l l S t a bi l i t y
稳定性测试方 法 目前 主要 有 :单 移线试 验 、 J 一转 向试验 和双移线试验 等 。上述 试验 主要 针对 的是配备有 动
汽车稳定性控制系统模型及横摆控制仿真_欧健
。 本文简化了车辆模型, 结
合汽车动力学稳定性控制要求, 建立了可实时计 算的整车动力学仿真模型, 通过对鱼钩试验的仿 真分析, 验证了 ESC 系统直接横摆控制( direct yaw control, DYC ) 对汽车横摆运 动、 侧倾运动的控制 效果。
1
1. 1
车辆动力学模型建立
八自由度整车模型 建立包括纵向运动、 侧向运动、 横摆运动、 侧
[4 ]
稳定性控制。 本文以横摆角速度为控制变量, 基 于模糊控制理论
[6 - 7 ]
, 以汽车实际横摆角速度与
名义横摆角速度的误差 E 以及误差变化率 EC 为 输入, 修正横摆力矩 M 为输出, 设计横摆角速度反 馈模糊控制器
[8 - 10 ]
。 模糊逻辑规则如表 1 所示,
PS、 Z、 NS、 NB 为模糊语言变量, 其中 PB 、 分别表示 正小、 零、 负小、 负大。 正大、
和车辆参考模型。采用车辆横摆角速度的状态差异法 , 基于模糊控制理论制定了直接横摆控制 实现了 ESC 系统对车辆的稳定性控制。对典型工况鱼钩试验进行仿真分析。 结 果表明: 策略, 所制定的控制策略可以有效地实现横摆稳定性控制, 而且减小 了侧 向加 速度, 使汽 车 具有一 定 的抗侧翻能力, 提高了汽车的稳定性和安全性。 关 键 词: 电子稳定控制; 模糊控制; 直接横摆; 侧倾 文献标识码: A 文章编号: 1674 - 8425 ( 2013 ) 02 - 0001 - 05 中图分类号: U416. 6
2 重庆理工大学学报 馈的控制方法对前外轮制动, 增强了 ESC 系统的 侧翻控制功能。博世公司在 ESC 系统的基础上描 述了侧翻缓解功能
[3 ]
② 各轮胎机械特性相同; ③ 悬架弹簧和阻尼均为 线性, 且二者平行; ④ 直接以前轮转角为输入, 且 两前轮转角相等; ⑤ 忽略空气阻力和滚动阻力的 影响。八自由度整车模型如图 1 所示。 1 ) 纵向运动方程: m( v x - v y γ) = ( F xfl + F xfr ) cosδ - ( F yfl + F yfr ) sinδ + F xrl + F xrr 2 ) 侧向运动方程: m( v y - v x γ) = ( F xfl + F xfr ) sinδ + ( F yfl + F yfr ) cosδ + F yrl + F yrr 3 ) 横摆运动方程: ( 2) ( 1)
基于主动制动的半挂汽车列车横摆稳定性控制

也显著增加。与传统的两轴汽车相 比, 其牵引车与
半 挂车 的运 动既 相 对 独 立又 相 互 耦 合 , 运 输 过 程 在 中可能 发生 “ 挂车甩 尾 ” “ 、折叠 ” “ 向摆 振 ” 复 和 横 等 半挂 汽 车 列 车 采 用 牵 引 车 与半 挂 车 的组 合 方 杂 的横 向失稳 现象 ; 同时 , 由于半 挂 车载 荷 变 化
制 , 望从根 本上 改善其 行驶 的稳 定性 , 有 引起 了汽 车 工业界 和 学 术 界 的 广 泛 关 注 , 为 研 究 的 热 点 问 成 题 J 。半挂汽车列车复杂的横 向动力学特性对其
1 非线性仿真模 型
非线性仿真模 型是控制策略仿真验证 的平 台,
为尽 可 能反 映实 际情况 , 建立 了包 含 l 4个 自由度 运 动 的非 线性半 挂 汽 车 列 车模 型 , 括 牵 引车 与半 挂 包 车的纵 向运 动 、 向运动 、 摆运 动 和侧倾 运 动 以及 侧 横
m dl sojc v ,aP a metcnrl ri d s n d ad ted c i ue fsl t gojc v rkn o e a bet e Iyw mo n o t l s ei e n h e io rlso ee i bet eba ig i oe g sn cn i
和半挂 车车轮 的合理选择 和主动制动实现横摆控制 ; 以跟踪参 考模型 的稳态横摆 响应 为 目标 , 计了 P 横摆稳 定 设 I
汽车横风下的动力学仿真分析及横摆稳定性研究

汽车横风下的动力学仿真分析及横摆稳定性研究作者:吴帅贾宝光位球球辛庆锋来源:《时代汽车》2024年第12期摘要:目前随着汽车行业的发展,对于汽车的稳定性能要求也越来越高。
本论文以某款车型为研究对象,探讨在高速的行驶的情况下,汽车结构参数、底盘参数等20个参数对于汽车横风稳定性的影响。
首先利用CFD软件计算车辆气动力系数,并通过Carsim软件建立整车动力学仿真模型,将气动力系数导入Carsim气动力学模型中。
在专家工程师所设定可接受程度的参数进行动力学仿真分析,并将汽车的横摆角速度作为车辆的稳定性能指标评估。
仿真结果表明,汽车前、后载荷对于横摆稳定性能影响最大,针对此款后驱车辆,前/后载荷增大,横摆稳定性能越好;风压中心位于质心或质心稍微靠后的位置,横摆角速度较小,具有较好横摆性能。
关键词:横风稳定性动力学仿真汽车底盘 CFD Carsim1 前言近些年来,新能源汽车行业快速发展,汽车稳定性能成为了研究的热点之一。
同时电动汽车或混合动力汽车等创新汽车概念进一步挑战了乘用车的基本布局[1]。
汽车在行驶过程中常会受到横风气流的干扰,尤其是车辆经过桥梁、涵洞、高楼等位置,车辆常常会产生较大的横摆角速度,这种情况下会较大影响车辆的舒适性和安全性,所以对于车辆横风稳定性的研究是必要的。
目前针对车辆的横风稳定性方法主要有三种:有限元分析、风洞试验、动力学分析方法。
針对有限元法和风洞试验,这两种方法主要运用于车辆气动外形的分析。
M. Gohle[2]通过风洞试验分析了a柱圆角、引擎盖-挡风玻璃夹角、后盖角度参数对于车辆侧向力的影响,a柱半径较大时,横摆力矩减小;引擎盖-挡风玻璃夹角对于前轮和后轮的效果相反,夹角减小,前轮侧向力减小,但后轮侧向力增加;后盖角度会极大影响横摆力矩。
王夫亮[3]针对某轿车模型,通过数值模拟和风洞试验对比气动六分力的对比,验证了利用CFD计算气动力系数的可行性,并研究横风风速对于汽车气动特性的影响。
汽车系统动力学第18章 车辆动力学集成控制及应用CarSim的实例分析

纵向和侧向控制系统在控制效能和平滑性方面各有优缺点。具体 表现为:①在有效作用域内,当轮胎处于小侧向加速度、小侧偏角的线性 域时,转向控制系统(如4WS、AFS 等)在操稳性上可以取得较好效果;但 在紧急工况下(大侧向加速度、大侧偏角时,即轮胎进入非线性域时),转 向控制通常不能取得满意效果,而直接横摆力矩控制则能显著地提高操 纵稳定性;
第四节 一种基于轮胎力最优分配的集成控制方法
一、基于轮胎力最优分配的车辆动力学集成控制结构 对于有多个主动控制系统的车辆,主动控制执行器输入的数目一 般大于其要控制的车辆状态的数目,称为“执行器冗余”(overactuation)现象。在存在执行器冗余的情况下,有两个问题至关重要: ①如何选择最有效的执行器来完成目标功能; ②在给出合理的轮胎执行器输入时,如何考虑轮胎的饱和非线性 以及诸如路面附着状况等各种实际约束条件。
式不同,可按X、Y、Z三个方向将车辆运动控制系统分别归类于纵向(制
动/驱动)、侧向(转向)和垂向(悬架)三大类子控制系统。 车辆动力学集成控制要解决的两个关键问题是:①如何避免子系统
间的互相冲突和干扰;②如何通过系统间的通信和动作协调,尽量挖掘各 子系统功能潜力从而实现性能最优。
图18-1 车辆动力学控制系统的发展历程
“主环-伺服环”分层控制结构,如图18-5所示。
图18-5 基于轮胎力最优分配的“主环-伺 服环”分层控制结构
由图可知,首先由主环控制器给出车体运动控制所需的力和力矩,
例如车辆在XOY平面内的纵向力、侧向合力和横摆力矩,即Fud=[Fxd Fyd Mzd]T。然后,在伺服环中,将轮胎作为复杂且特殊的“执行器”, 通过优化分配将Fud分配到各个轮胎执行器的控制输入。这样一个结
汽车动力学基础 第七章 汽车侧倾动力学

当汽车承受侧向力时,车身便相对地发生侧向倾斜,使法向力在左、右轮 间重新分配,影响着弹性轮胎的侧偏特性,还引起前轮定位参数发生变化以及 侧倾转向,从而影响汽车稳态及瞬间转向特性等。
过大的车身侧倾会使车辆发生绕其纵轴旋转90o以上的侧翻,造成严重的交 通事故。
车侧倾动力学主要内容包括侧倾中心、车轮侧倾外倾、侧倾转向、侧倾动 力学模型、汽车侧翻运动及抗侧倾性评价指标等。目前,汽车侧倾动力学在客 车、货车等高质心商用车研究和开发中受到更多重视。
ks
m
2
n
整个悬架的线刚度
Kl
2ks
m n
2
Δφr Δst
Δss
Cs Gs
m n
FZ
7.2.2 悬架的侧倾角刚度
悬架的侧倾角刚度:在单位车身侧倾转 角下(车轮保持在地面上),悬架系统
Kl
B 2
d
施加给车身总的弹性恢复力偶矩。
dT
K d
Kl
车身发生小侧倾角dφ时
dT
2
K
' l
B 2
d
B 2
7.1 侧倾几何学 7.1.1 侧倾中心
车身在前、后轴处横断面上的瞬时转动中心。
O24
Om
vd
E
F
D
G
vg
单横臂独立悬架侧倾中心
O23
O12
2
3
O13
1 4
O14
O34
四连杆机构的相对运动瞬心
7.1 侧倾几何学 7.1.1 侧倾中心 :车身在前、后轴处横断面上的瞬时转动中心。
vd
Ol
Om
vd
Ol
FYγl FYαl
汽车主动防侧倾系统建模与试验分析
汽车主动防侧倾系统建模与试验分析黄康;潘毅;赵萍【摘要】A dynamics model of automotive active anti-roll bar system was proposed to improve the vehicle's driving stability.A PID roll stability controller was designed by establishing auto active defense tilting lever model in the MATLAB/Simulink environment,and the automobile dynamics model was established in CarSim,and the simulation of the system was realized by MATLAB/Simulink and CarSim.The simulation results indicate that the active anti-roll bar system may significantly reduce the roll angles of vehicle body compared with common anti-roll bar.The road tests were also processed,which verified the simulation and approves that the automotive active anti-roll bar system may effectively improve the vehicle's driving stability and safety,as well as the riding comfort.%为提高汽车行驶稳定性,建立了汽车主动防侧倾系统的动力学模型,通过在MATLAB/Simulink环境中建立汽车主动防侧倾稳定杆模型,设计了PID侧倾稳定控制器.在CarSim软件中建立了汽车动力学模型,实现了该汽车主动防侧倾系统的MATLAB/Simulink和CarSim的联合仿真.仿真结果表明:与传统横向稳定杆相比,汽车主动防侧倾系统能够明显减小车辆车身的倾角.最后通过实车试验对仿真结果进行了验证,试验结果表明了仿真结果的正确性,证明了汽车主动防侧倾系统能有效提高车辆行驶稳定性和安全性,改善乘坐舒适性.【期刊名称】《中国机械工程》【年(卷),期】2017(028)022【总页数】7页(P2701-2706,2731)【关键词】主动防侧倾;稳定杆;侧向稳定性;联合仿真【作者】黄康;潘毅;赵萍【作者单位】合肥工业大学机械工程学院,合肥,230009;合肥工业大学机械工程学院,合肥,230009;合肥工业大学机械工程学院,合肥,230009【正文语种】中文【中图分类】U461为改善汽车行驶平顺性,通常把悬架刚度设计得比较低,其结果是影响了汽车行驶稳定性。
铰接式客车转向动力学仿真及其稳定性控制策略

摘要铰接式客车作为BRT快速公交系统的重要车型,具有载客量大、运营成本低的优点,近年来成为了研究热点。
铰接式客车由主车、副车及铰接装置组成。
由于结构复杂,铰接式客车的速度得到了很大限制。
为了解决铰接式客车在高速行驶时的稳定性问题,本文利用直接横摆力矩控制方法对铰接式客车进行了稳定性控制策略的研究。
本文首先分析了铰接式客车在稳态转弯时,可能发生的动力锁死问题,并基于此设计了以最优主副车夹角为目标函数的优化模型,优化模型的约束方程包括主、副车车身的几何参数限制以及国家标准对铰接式客车转弯通道宽度的限制标准。
优化后,主副车夹角显著降低,提高了铰接式客车稳态转弯能力。
针对铰接式客车高速转弯时的瞬态响应特性,本文建立了铰接式客车包含主车模型、副车模型、饺接装置模型在内的十五自由度整车模型,并仿真分析了铰接式客车在三种方向盘转角输入时,不同车速下,主、副车的运动响应。
仿真结果表明,方向盘转角较小时,铰接式客车在不同车速下都有良好的转向性能,而当方向盘转角较大且车速较高时,铰接式客车出现转向失稳的危险工况。
为了提高铰接式客车高速工况下的转向能力,对其施加直接横摆力偶矩控制,直接横摆力偶矩通过主、副车制动器差动制动产生。
通过理论分析,确定了直接横摆力偶矩的控制目标为主车横摆角速度、质心侧偏角和副车质心侧偏角,并推导了其理想模型。
同时设计了以副车质心侧偏角归零为控制目标的PID控制器和主车质心侧偏角及横摆角速度跟随其理想模型的PID控制器和模糊控制器。
控制结果表明,当副车控制方式为PID控制且主车控制方式为PID模糊联合控制时,铰接式客车的运动响应品质最优。
关键词:汽车工程;铰接式客车;直接横摆力矩;稳定性;车辆动力学AbstractAs an important bus model of BRT system, articulated bus has attracted a mass of attention for its advantages such as large capacity and low operating costs. The articulated bus consists of main bus, sub-bus and articulated devices. Due to the complex structure, the speed of articulated bus has been very limited. In order to solve the problem of stability of articulated bus when driving at high speed, the stability control strategy of the articulated bus has been studyed with the direct yaw moment control method being used in this paper.In this paper, the potential lock-up problem of articulated bus when turning in steady-state was analyzed initially. Optimization model was designed based on this, with the angle between main bus and sub-bus as the objective function. The constraint equations of the optimization model included the geometric parameters of the main and auxiliary vehicle body and based on national standard of the limits of the width of the articulated bus turning channel. After optimization, the angle between main bus and vice bus was significantly reduced,and the turning ability of articulated bus had been improved.To obtain the transient response characteristics of articulated bus during high-speed turning, a 15-DOF vehicle model of articulated bus including the main vehicle model, deputy vehicle model and dumpling device model was established in this paper, and then simulated the motion response of the main and sub vehicles under the different speed of the articulated bus when the three steering wheel angles are input.Simulation results show that when the steering wheel angle is small, articulated bus has good steering performance at different speeds, while the steering wheel angle is large and the speed is high, articulated bus has potential of instability.In order to improve the steering capacity of articulated passenger bus when driving at high speed, the direct yaw moment control was applied, and the direct yaw moment is generated by the brake differential of the main and sub bus. Through theoretical analysis, the control target of the direct yaw moment is determined as the yaw velocity of main bus, side slip angle of main bus and sub-bus, and the ideal model was deduced based on it. Meanwhile, the PID controller was designed, which targets the side slip angle of the sub vehicle was zero ,and PID controller and fuzzy controller are designed to make the yaw angular velocity and side slip angle of the main bus follow the ideal model .The control results show that when the sub-bus was controlled by PID control and the main bus was controlled by PID fuzzy joint control, the motion response quality of the articulated bus is the best.Keywords: Automotive Engineering; Articulated bus; Direct yaw moment; Stability; Vehicle dynamics目录摘要 (I)Abstract (II)第一章绪论 (1)1.1 课题背景及意义 (1)1.2 国内外研究现状 (2)1.2.1 铰接式客车的发展现状 (2)1.2.2 国内外关于汽车操纵稳定性相关研究历史及现状 (3)1.2.3 车辆操纵稳定性控制方法 (6)1.3 主要研究目的 (10)1.4 主要研究内容 (10)第二章铰接式客车车身参数的优化设计 (12)2.1 铰接式客车转弯特性分析 (12)2.2 优化设计及分析 (14)2.2.1 设计变量及优化设计目标函数的确定 (14)2.2.2 约束条件的确定 (16)2.3 优化设计程序实现 (18)2.3.1 优化设计结果 (18)2.3.2 讨论和分析 (20)2.4 本章小结 (21)第三章铰接式BRT客车动力学模型及仿真分析 (22)3.1 引言 (22)3.2 轮胎运动坐标系 (22)3.3 轮胎模型 (23)3.3.1 轮胎模型介绍 (23)3.3.2 魔术公式轮胎模型 (24)3.4 主车动力学模型 (29)3.4.1 主车运动方程的推导 (29)3.4.2 主车轮胎垂直载荷的计算 (34)3.4.3 主车轮胎滑移率及阿克曼转向角理论 (35)3.5 副车动力学模型 (37)3.6 铰接装置的力学模型 (39)3.7 模型仿真及分析 (40)3.8 本章小结 (44)第四章铰接式客车稳定性控制策略的研究 (45)4.1 横摆角速速与汽车行驶稳定性关系 (45)4.2 质心侧偏角与汽车稳定性的关系 (46)4.3 铰接式客车操纵稳定性控制原理及目标 (48)4.3.1 直接横摆力偶矩控制的理论与方法 (48)4.3.2 直接横摆力矩控制目标及其理想模型 (51)4.4 铰接式客车操纵稳定性控制方法的研究 (53)4.4.1 副车PID控制—主车PID控制 (54)4.4.2 副车PID控制—主车模糊逻辑控制 (58)4.4.3 副车PID控制—主车PID模糊逻辑联合控制 (65)4.5 本章总结 (66)总结与展望 (67)参考文献 (69)攻读硕士学位期间取得的研究成果 (74)致谢 (75)第一章绪论第一章绪论1.1 课题背景及意义当前,由于全球经济的快速发展及与之伴随的人口和机动车辆的高速增长[1],城市面临的交通压力日益严峻。
车辆侧倾稳定性分析与侧翻预警

本案例以某品牌轿车为例,介绍其在设计和生产过程中如何对车辆的侧倾稳定性和侧翻预 警进行联合优化。该品牌车型通过采用先进的动力学模型、优化结构设计、合理布置传感 器等方法,实现了对车辆侧倾稳定性和侧翻预警的联合优化。
车辆侧倾稳定性和侧翻预警联合优化结论
通过对某品牌轿车的车辆侧倾稳定性和侧翻预警进行联合优化,显著提高了该车型的安全 性能和行驶稳定性。在设计和生产过程中,注重对这两方面的性能进行优化,能够为驾驶 员和乘客提供更加安全、舒适的驾驶体验。
侧翻风险评估
基于侧翻识别结果,对车 辆的侧翻风险进行评估, 通常采用基于概率统计的 方法进行评估。
预警信号输出
一旦识别出车辆可能发生 侧翻,系统会立即输出预 警信号,提醒驾驶员采取 相应的避险措施。
车辆侧翻预警系统设计
传感器选择与布置
选择合适的传感器,如陀螺仪、加速度计等,并合理布置在车辆 的关键部位,以便准确监测车辆的动态性能。
车辆侧倾稳定性分析与侧翻预警
汇报人:
日期:
• 车辆侧倾稳定性分析 • 车辆侧翻预警系统 • 车辆侧倾稳定性与侧翻预警的关
系 • 案例分析与应用 • 总结与展望
01 车辆侧倾稳定性分析
车辆侧倾稳定性基本概念
01
车辆侧倾稳定性是指车辆在侧向 力作用下保持稳定不倾覆的能力 。
02
车辆侧倾稳定性的影响因素包括 车辆结构、重心位置、轮胎摩擦 力、空气动力学等。
实时性评估
评估系统的实时性,即从 识别到预警输出的时间延 迟。
鲁棒性评估
评估系统在各种工况下的 稳定性,如在不同道路条 件、车速、载荷等条件下 的表现。
03 车辆侧倾稳定性与侧翻预警的关系
CarSim Training2——参数详解 (1)

空气动力学参数
Main Screen: 只考虑风向的影响 Pitch,Bounce,Yaw:除了风向的影响,还考虑俯仰和轮跳的影响
Aerodynamics:Main Screen
变量名称
物理意义
CFx vs slip angle 阻力系数
CFy vs slip angle 侧向力系数
CFz vs slip angle 升力系数
Show front Fog effect
物理意义 obj、stl格式的模型文件
颜色 是否用运行时设置的颜色 设置可见性、透明度 设置雾的效果
Lighting effect
光效果
Angle offset、 Scale factor、 Coordinate offset、 Reference length
Mass of Whole vehicle
Mass of sprung mass
整车质量 簧上质量的质量
Ixx、Iyy、Izz、Ixy 、Ixz、Iyz of
whole vehicle
Ixx、Iyy、Izz、Ixy 、Ixz、Iyz of
sprung mass
整车转动惯量、惯性积 簧上质量转动惯量、惯性积
物理意义
离合器所能传递的扭矩和控 制信号之间的关系
定常控制信号,常开、常闭、 或者某一位置,离合器的控 制可以通过VS Commands、 Simulink、C、VB等控制
限滑式差速器
变量名称 TBR
Type of effect Pre-load
模型平移,旋转,缩放,参 考长度
Sound Sample File
变量名称
Path name for sound sample file
车辆动力学-操纵动力学-2013汇总
K 0
K 0
K 0
ucr
uch ua
1. 基本操纵模型
最简单的车辆操纵模型:纵向运动,侧向运动和 横摆运动 轮胎纵向力:驾驶员通过加速踏板和变速机构 控制驱动力大小,通过制动系统来控制制动力; 轮胎侧向力:通过转向系统控制轮胎的侧向力
基本操纵模型
单轨操纵动力学模 型:不考虑轮胎的 左右载荷转移 坐标系: 车身上具 有加速度的随动坐 标系,
横摆角速度和侧向加速度为重要的输出参数。
零频率-稳态响应
车辆参数为操纵性的影响
稳定裕度 车辆的质心位置:轮胎垂直载荷也会随之变化, 影响轮胎侧偏角。 轮胎侧偏刚度:可调节胎压 载荷的轴向转移: 车轮外倾角的影响 变形转向
载荷的轴向转移:
通过车辆前、后悬 架侧倾刚度的匹配 关系来控制载荷转 移。 侧倾刚度受悬架弹 簧体现的主悬架刚 度和一些附加因素 (横向稳定杆)的 综合影响。
车轮轮心的位置矢量: 车轮的转动动能:
转向系统的影响
实际的转向系统,当系统输入以角位移或转矩 的形式施加于转向盘,并假设转向盘转角与车 轮转角比值i为恒定。
前轮的转向转动动能; 转向柱的势能; 转向系统的耗散能;
广义力:
转向系统的运动方程:
轮胎侧向力和回正力矩与侧偏角的关系:
横摆瞬时中心至后轴质心的距离br:变形转向 角和轮胎侧向偏移量之比)
后轴相对车身的扭转刚度:
后轴质心相对参考原 点的位置矢量:
位置矢量在惯性参考系内的速度:
位置矢量P在参考基C内的速度矢量
车辆动力学,汽车的操纵稳定性3.

3 汽车的操纵稳定性目录3 汽车的操纵稳定性 03.1 自由刚体运动微分方程 (1)补充知识:自由刚体的运动(摘自《理论力学》上册) (1)(一)建立坐标系 (3)(二)汽车上任一点的运动方程 (5)(三)汽车运动的动力学方程 (8)3.2 线性二自由度汽车运动微分方程及分析 (11)(一)运动微分方程 (11)(二)稳态响应分析 (13)(三)瞬态响应分析 (17)3.3 车厢侧倾分析 (19)(一)车厢的侧倾轴线 (19)(二)悬架的侧倾线刚度 (22)(三)悬架的侧倾角刚度 (25)(四)车厢的侧倾角 (26)(五)车厢侧倾后垂直载荷在左、右侧车轮上的重新分配 (29)(六)车厢侧倾对转向系统的其它影响 (32)3.4 线性三自由度汽车运动微分方程分析 (35)(一)三自由度汽车运动微分方程 (35)(二)稳态响应 (43)(三)瞬态响应 (43)3.5 前轴和转向轮摆振方程 (47)(一)前左轮主销的摆动方程 (47)(二)前右轮主销的摆动方程 (52)(三)前轴绕纵轴的摆动方程 (52)3汽车的操纵稳定性操纵稳定性定义(两个方面):a 、汽车能遵循驾驶员通过转向系及转向车轮给定的方向行驶;b 、当遭遇外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力。
汽车的操纵稳定性是决定高速汽车安全行驶的一个主要性能,也称为“高速车辆的生命线”。
3.1 自由刚体运动微分方程补充知识:自由刚体的运动(摘自《理论力学》上册)工程中,有一些刚体,如飞机、火箭、人造卫星等,它们在空间可以作任意的运动,这样的刚体称为自由刚体。
为了确定自由刚体在空间的位置,取定坐标系oxyz 和与刚体固结的动坐标系0x y z '''',如下图所示。
只要确定了动坐标系的位置,刚体的位置也就确定了。
动坐标系的原点o '是任意选取的,称为基点。
在基点上安上一个始终保持平动的坐标系o ξηζ',则自由刚体的运动可分解为随基点的平动和绕基点的转动。
主动悬架与主动横向稳定杆的集成控制
主动悬架与主动横向稳定杆的集成控制周兵;吕绪宁;范璐;张文超【摘要】A dynamics model of a full vehicle w hich equipped the active suspension system and ac-tive roll stabilizer was set up to improve ride performance and handling stability of the vehicle .Also active suspension and active roll stabilizer controllers were designed based on the coupling relationship between the two systems .The PID integrated control strategy was designed based on PID control and linear control .The vehicle in the steering working situation was simulated with MATLAB/Simulink . The simulation results show the effectiveness of proposed integrated control strategy to improve han-dling stability and ride comfort .%为改善汽车的平顺性和操纵稳定性,建立了包含主动悬架与主动横向稳定杆的整车动力学模型,并根据主动悬架与主动横向稳定杆两个系统间的耦合关系,分别设计了主动悬架与主动横向稳定杆的子控制器,将PID与线性控制相结合,设计了PID集成控制策略。
在MATLAB/Simulink中对汽车的转向工况进行了仿真。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽 工 I 车 程币 J
FCS O U 技术聚焦
摘要: 车在 急转弯时 ,侧 倾运动对其横向栽荷转移率和轮胎垂向受力的改 变,不仅 会引起侧翻 事故 ,还会对横摆 客
运动产生重要 影响。文章综合 分析客车侧倾 、横摆 动力学及其耦合 关 系,建 立耦 合动 力学模 型 采用差动制动 和
I tg ae tbl yS se o u ie e t r iga dY wigDy a c ( a t ) ne r tdS a i t y tm f s d r u nn n a n n mis P r i B S Ov I
Ab t a t s r c :Th h n e o t r l o d ta se n e t a o c n tr s d e t ae a i ci ai n d r n h r u n n e c a g fl e a a r n f ra d v ri lf r e o ie u o lt r l n l t u i g s a p t r i g a l c n o wi o n y la o sd v ru n n , u lo e e ti o t n n l e c n y wi gm o i n By m a i g ac mp e e sv l n t l d t i eo e t r i g b t s x r mp ra t f n eo a n t . k n o r h n i e l o e a i u o a a y i o eb s i eo e t r i g y wi g d n mi sa d is o p i gr lt n t i p p re t b ih sad n mi s n l ss n t u d v ru n n , a n y a c n u l ea i , h s a e sa l e y a c d l h s tc n o s mo e , wh c d p s s c c i e c n r l eh d sd fe e ta r k n n c i e r l d v c swela h n e r t d c n r l ih a o t u h a t o to t o sa if r n il a i g a d a t o l e i e a l st e it g a e o to v m b v d sg a e n si i g mo e c n r 1 T i lto e u t n ia e a e s se c n i r v t b l y o u i e e i n b s do l n d o to . hesmu a i n r s l i d c t st t h y t m a d h t mp o et sa ]i f ssd he t b o e t r i g a d y wi g d n m is a d i c n c mp e e sv l u c i n a u i eo e t r i g a d sd l r v n i n v ru n n n a n y a c , n a o t r h n ie y f n to sb ssd v ru n n n i esi p e e t . p o Ke r s Dy a c t b l y S d lp p e e to ; i eo e t r i gpr v n i n S i n o ec n r l y wo d : n mi ssa ii ; i es i r v n i n S d v r u n n e e to ; l t di g m d o t o
据 美 国道 路 与 交 通 安 全 协 会 ( T A)统 计 , NH S
机理 和较 为成 熟 的结 论还 比较 少 。主 要原 因是 缺乏 将
每 年在 美 国有超 过 6 0万 起 交通 事 故 ,之 中有近 4万 客车 各子 系统 之 间 的协调 与提 高 客车 整体 性 能有机 结 0 起 严重 交通事 故 。其 中 ,由于操 纵 失控 所 造成 的追 尾 、 合 , 以及 如何 将现 代控 制理 论 有效 应 用于集 成控 制框 侧翻 及侧 滑 等事 故原 因位 列前 几位 ,并 占所有 交通 事 架 , 何有 效处 理集 成系 统 中各个 子 系统 的独特 行 为。 如 故 原 因 中 的 9 % 以 上 L。而 在 我 国 ,6 % 的 交 通 事 因此 ,文章 研 究 的客车 横摆 与侧 倾动 力学稳 定集 成控 O 】 】 0 故 是 由车辆 侧 滑 引起 ,其 中 有 2 % 会 造 成 重 大 人 员 制 要 比传统 意 义上 对二 者进 行 单独控 制 更 具实 际应用 5 伤亡 。 由车辆侧 翻 所 引起 的交通 事 故虽 然 比率不 大 , 效 果 ,不仅 可 以达 到防侧 滑 和 防侧翻 的功 能,而 且该 但更 易 引起重 大交 通 事故 f 2 ] 。客 车作 为 城 区或城 市 之 集 成控 制系 统可 进 一步 有效 提 高客车 防侧 滑和 侧翻 的
主动式防倾杆 等主动控制 方法,并基 ,该 系统可提 高客车侧倾
与横 摆 动 力 学稳 定性 , 实现 客 车 防侧 翻 和 防侧 滑 的综 合 功 能 . 关键词 : 动力 学 稳 定 性 ; 防侧 滑 ; 防侧 翻 ; 模 控 制 滑