自控理论作业解答.ppt
第一章自动控制原理绪论例题 ppt课件

PPT课件
26
• 画出图示电加热系统的结构图,简述结构 特点和调节过程,并说明受控对象,被控 量、给定量、偏差、内扰、外扰都指的是 哪些设备和物理量。
PPT课件
27
• 结构图:结构特点为闭环,具备抗干扰能 力。
• 被控量:电阻炉温度;受控对象:电阻炉; 给定量:电阻炉的温度希望值;外扰:炉门 开关频度变化;内扰:电源电压波动。
PPT课件
29
判别下列动态方程所描述的系统的性质:线性或非线 性,定常或时变,动态或静态。
t ; (1)C( t ) 5 r ( t ) t r ( t ) 6C ( t ) 8C( t ) r ( t ); t 3C (2)r
2
( t ) C( t ) r ( t ) 3r t ; (3)tC (4)C( t ) r t cost 5; ( t ) 5 r d ; (5)C( t ) 3rt 6r (6)C( t ) r t ;
PPT课件
18
• 系统的被控对象是电炉,被控量是电炉炉温; 电动机、减速器、调压器是执行机构,热电偶 是检测元件。 • 电炉温度控制系统的方块图如图1-16所示。
PPT课件
19
1-7 在按扰动控制的开环控制系统中,为什么说一 种补偿装置只能补偿一种与之相应的扰动因素? 对于图1-19中的按扰动控制的速度控制系统,当 电动机的激磁电压变化时,转速如何变化?该补 偿装置能否补偿这个转速的变化?
PPT课件
12
1-4 图1-13为水温控制系统示意图。冷水在热交换器 中由通入的蒸汽加热,从而得到一定温度的热水。 冷水流量变化用流量计测量。试绘制系统方块图, 并说明为了保持热水温度期望值,系统是如何工作 的?系统的被控对象和控制装置各是什么?
自控控制原理经典例题集PPT讲解
c(t)
s
0
s
0
1
图1
0
c(t) c(t)
1
图2(a)
1
0 t 0
图2(b)
t
图2(c)
t
at 2
图2(d)
t
例题17解答
系统闭环传递函数为:
系统阶跃响应的拉式变 换式为:
(s)
s2
0
K1 K 2
K
2
s
0
K1
K
2
C(s)
(s)
R(s)
s2
0
K1 K 2
K
2
s
0
K1
K
2
1 s
情况(a):输出为等幅振荡
R+N1
G1
-
-
N2
N3 -
G2
G3
C
E(s) 1 G2 G2G3 R(s) 1 G2 G1G2G3 E(s) G1G2G3 G2G3 N1(s) 1 G2 G1G2G3 E(s) G3 G2G3 N2 (s) 1 G2 G1G2G3 E(s) 1 N3(s)
例6:
设系统特征方程如下: s4 2s3 3s2 4s 5 0
F(t) f
k M y(t)
位移定理应用举例
• 例3.
求 f ( t ) ( t ) 1( t )的拉氏变换。
提示:
F(t) 相当于t·1(t) 在时间上延迟了 一个值。
f (t)
t 1(t )
(t ) 1(t )
0
t
位移定理例题1解答
应用实域中的位移定理有:
F (s) L[(t ) 1(t )]
总的稳态误差ess。
自控原理习题全部解答

第九章 现性系统的状态空间分析与综合习题解答9-1 已知电枢控制的直流伺服电机的微分方程组及传递函数 b aaa a a E dtdi L I R U ++= dtd K E mbb θ= a m m i C M =dt d f dtd J M mm m m m θθ+=22 )()([)()(2m b m a a m m a m a ma m C K f R s R J f L s J L s C s U s ++++=Θ (1) 设状态变量mm m x x x θθθ ===321及输出量m y θ=,试建立其动态方程;(2) 设状态变量mm a x x i x θθ ===321,,及 m y θ=,试建立其动态方程 (3) 设,x T x =确立两组状态变量间的变换阵解:(1)由题意可知: ⎪⎪⎩⎪⎪⎨⎧=======123121xy xx x x x m m mmθθθθ ,由已知 ⎪⎪⎩⎪⎪⎨⎧+===++=m m m m ma m m mb ba a a a a f J M i C M K E E i L i R U θθθ可推导出 ⎪⎪⎪⎩⎪⎪⎪⎨⎧=++-+-===12333221x y U J L C x J L C K f R x J L R J L f x x x x xa ma mm a m b m a m a a m a m由上式,可列动态方程如下=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321x x x ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+-+-m a a m m a m a m b m a J L R J f L J L C K f R 0100010⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321x x x +⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡m a m J L C 00a Uy =[]001⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321x x x(2)由题意可知:,1a i x =mm m y x x θθθ===,,32 可推导出⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧==-=-====+--=+--==23133231111x y x J f x J C J f i J C x x x U L x L K x L R U L L K i L R i x m m m m m m m m a m m m m a aa b a a a a m a b a a a aθθθθθ可列动态方程如下[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=321010x x x y由⎪⎩⎪⎨⎧===mm mx x x θθθ 321和⎪⎩⎪⎨⎧===mm a x x i x θθ 321得 aa m m mm a b a aU L x x x J f JC L K L R x x x ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡00101000321321⎪⎪⎪⎩⎪⎪⎪⎨⎧-=-======3133221x J f x J C J f i J C x x x x x m m m m m m m a m m m m m θθθθ由上式可得变换矩阵如下⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-=m m mm J f J C T 010010 9-2设系统微分方程为 u x x x =++23式中 u 为输入量,x 为输出量(1)设取状态变量 xx x x ==21, 试列写动态方程 (2) 设有状态变换2122112,x x x x x x --=+=,试确定变换矩阵及变换后的动态方程 解:(1) 由题意可知⎩⎨⎧+--===u x x x x x x1222123动态方程即为(2) 即⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡21213210x x x xU x x U x x x xx x ⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--⎥⎦⎤⎢⎣⎡--⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡---112001102111211132102111211121121121121 9-3 设系统微分方程为u y y y y 66116=+++式中u ,y 分别为系统输入,输出量。
自控原理习题解答(第六章)(课堂PPT)

2
900 2 1 2025 2 1
yt Gj 0.8sin0.1t Gj
3.2 0.8
sin 0.1t 2tg130 0.1 tg1 45 0.1
900 0.12 1 2025 0.12 1
2.56 sin0.1t 143.13 77.47
10 21.25
0.056sin0.1t 220.6
1
GjHj
5 12
1 0.12 1 0.22 1 22
GjHj tg1 tg1 0.1- tg1 0.2 tg1 2
0 : M 5, 0
: M 0, 90 90 90 90 180
13
答6 41 3.MATLAB画法
GsHs
0.04s3
5s 1 0.62s2
kT1s 1
T2s 1
k
T1s
1
T2
1 s
1
R1 R2
k
R2 R1 R2
, T1
R1C, T2
R1R 2C R1 R2
T1 T2 , k 1
1
1 T1
2
1 T2
22
L dB
1
2
90 45
0
1
2
- 45
- 90
23
答6 5b
E0 s Ei s
R2
1 Cs
1 R 2 R1 Cs
R1
R
R1C1s 1R 2C2s 1 2C2s 1R 2C1s 1 R1C2s
R1C1s 1R 2C2s 1 R1C1R 2C2s 2 R1C1 R 2C2 R1C2
s
1
Tas 1Tbs 1 Ta Tbs 2 Ta Tb Ta Tb
自控原理课件及习题解答

s→0
s
1+
k sν
G0H0
r(t)=R·1(t) R(s)=R/s
ess=
1+
R lim k s→0 sν
r(t)=R·t R(s)=R/s2
ess=
R
lim s
s→0
k sν
·
r(t)=Rt2/2 R(s)=R/s3
ess=
R
lim
s→0
s2·skν
取不同的ν
R·1(t) R·t Rt2/2 R·1(t) R·t Rt2/2
用正无穷小量ε代替。
劳斯判据
系统稳定的必要条件: s6 1 3 5 7
特征方程各项系数 s5 2 44 6
均大于零!
有正有负一定不稳定!
s4 1 2 77
s3 0ε --88
缺项一定不稳定!
s2 2ε+8 7ε
-s2-5s-6=0稳定吗? s1 -8(2ε+8) -7ε2
系统稳定的充分条件: s0 7ε
引出点移动
G1
G1
H2 G2
H1
H2 G2
H1
G3
G4
H3
1 G4
G3 a G4 b
H3
综合点移动
G3 G1
向同类移动
G3
G1
G2
H1
G2 G1 H1
G4
G1
G2
H1
G4
G1
G2
H1 H1
作用分解
G3 H3
G3 H3 H3
梅逊公式介绍 R-C : △称为系统特征式
C(s) R(s)
=
∑Pk△k △
. EEˊ(rsν()=s=)C1=希-CRH实称((=ss))为RH-(C(ssⅠ))(s-型)C(系s) 统
自动控制理论第一章习题答案

⾃动控制理论第⼀章习题答案第⼀章⾃动控制概论思考题1、什么是⾃动控制?他对⼈类活动有什么意义?所谓⾃动控制就是在没有⼈直接参与的情况下,通过控制装置使被控制对象或⽣产过程⾃动地按照预定的规律运⾏,使之达到预期的状态或性能要求。
⾃动控制是⼈类在认识世界和发明创新的过程中发展起来的⼀门重要的科学技术。
依靠它,⼈类可以从笨重、重复性的劳动中解放出来,从事更富创造性的⼯作。
2、什么是反馈?什么是负反馈?通常,我们把输出量送回到输⼊端并与输⼊信号⽐较的过程称为反馈。
若反馈的信号是与输⼊信号相减⽽使偏差值越来越⼩,则称为负反馈。
3、开环控制系统是怎样实现控制作⽤的?请举例说明。
开环控制系统:如果系统的输出端和输⼊端之间不存在反馈回路,输出量对系统的控制作⽤没有影响,这样的系统称为开环控制系统。
例:原始的数控机床进给系统就是开环控制系统。
指令输⼊到计算机控制系统之中,带动步进电机运动,使⼯作台移动,产⽣位移输出。
在⽇常⽣活中,许多控制系统都可以理解成开环控制系统,如电风扇的转速是由档位决定的,不能根据环境温度⾃动调节;洗⾐机定时系统是由功能和时间决定,不能根据所洗⾐物清洁程度⾃动调节。
4、闭环控制系统是怎样实现控制作⽤的?请举例说明。
闭环控制系统:闭环控制(亦称为反馈控制,Feedback Control)是指能对输出量与输⼊量进⾏⽐较,并且将它们的偏差作为控制⼿段,以保持两者之间预定关系的系统。
如:⾃动调温空调,当环境温度⾼于设定温度时,空调制冷系统⾃动开启,调定室温到设定值。
5、对⾃动控制系统的基本要求是什么?对控制系统的基本要求是:系统的稳定性、响应的快速性、响应的准确性。
6、试叙述电冰箱中温度控制系统的温度控制过程。
电冰箱温度控制系统由感温管,温度调节,执⾏动作等系统组成。
冰箱没⼯作时,感温管内⽓体遇热就膨涨,触点就将两原来断开的接触点靠在⼀起了。
冰箱在⼯作时,由于冰箱内制冷系统在给冰箱不段的输⼊冷⽓,就越来越冷,随着温度不短降低,感温管内的⽓体缩⼩,⽓垫就将断点段开,然⽽就将冰箱停⽌⼯作!7、试叙述骑⾃⾏车时的闭环控制过程。
《自控课后题》PPT课件
George Devol develops "programmed article transfer." considered to be the first industrial robot design.
the regulator of Heron of Alexandria
调节器工作方式如下:火,作为系统的输入,加热祭坛底部的空气, 热(膨胀的)空气将水从中容器(罐1)推到桶(罐2)中。罐1的位 置是固定的,桶由缠绕在门轴上的绳索吊起来,W为配重,当桶为空 时,在配重W作用下,门关闭。当桶中有适量的水时,向下移动,而 配重W向上移动,门被自动打开。当火被熄灭时,水从桶中回流到罐 1,配重W向下移动,大门自动关闭。
Eli Whitney's concept of interchangeable parts manufacturing demonstrated in the production of muskets. Whitney's development is often considered as the beginning of mass production.
自控原理习题答案(全)
第一章 习题答案1-11-21-3 闭环控制系统主要由被控对象,给定装置,比较、放大装置,执行装置,测量和变送装置,校正装置等组成。
被控对象:指要进行控制的设备和过程。
给定装置:设定与被控量相对应给定量的装置。
比较、放大装置:对给定量与测量值进行运算,并将偏差量进行放大的装置。
执行装置:直接作用于控制对象的传动装置和调节机构。
测量和变送装置:检测被控量并进行转换用以和给定量比较的装置。
校正装置:用以改善原系统控制性能的装置。
题1-4 答:(图略)题1-5 答:该系统是随动系统。
(图略) 题1-6 答:(图略)第二章习题答案题2-1 解:(1)F(s)=12s 1+-Ts T(2)F(s)=0.5)421(2+-s s(3)F(s)=428+⋅s es sπ (4)F(s)=25)1(12+++s s(5)F(s)=32412ss s ++ 题2-2 解:(1) f(t)=1+cost+5sint(2) f(t)=e -4t(cost-4sint) (3) f(t)=t t t te e e 101091811811----- (4) f(t)= -t t tte e e ----+-3118195214 (5) f(t)= -t te e t 4181312123--+++ 题2-3 解:a)dtduu C R dt du R R c c r 22111=++)( b)r c c u CR dt du R R u C R dt du R R 1r 12112111+=++)( c) r r r c c c u dtdu C R C R dtu d C C R R u dtdu C R C R C R dtu d C C R R +++=++++)()(1211222121122111222121 题2-4 解:a) G(s)=1)(212++s T T sT (T 1=R 1C, T 2=R 2C )b) G(s)=1)(1212+++s T T s T (T 1=R 1C, T 2=R 2C )c) G(s)= 1)(1)(32122131221+++++++s T T T s T T s T T s T T (T 1=R 1C 1, T 2=R 1C 2, T 3=R 2C 1, T 4=R 2C 2 ) 题2-5 解:(图略) 题2-6 解:33)(+=Φs s 题2-7 解:a) ksf ms s +-=Φ21)(b) )()()(1))(1)(()(21221s G s G s G s G s G s +++=Φc) )()(1)())()(()(31321s G s G s G s G s G s ++=Φd) )()()()(1))()()(323121s G s G s G s G s G s G s -+-=Φe) G(s)=[G 1(s)- G 2(s)]G 3(s)f) )()()()()()()()()()(1)()()()()(43213243214321s G s G s G s G s G s G s G s G s G s G s G s G s G s G s +-++=Φg) )()()()()()()()(1)()()()(43213212321s G s G s G s G s G s G s G s G s G s G s G s -+-=Φ题2-8 解:102310)1()()(k k s s T Ts k k s R s C ⋅++++⋅=1023101)1()()(k k s s T Ts k k s N s C ⋅++++⋅=1023102)1()()(k k s s T Ts s T k k s N s C ⋅++++⋅⋅⋅= 题2-9 解:)()()()(1)()()(4321111s G s G s G s G s G s R s C +=)()()()(1)()()(4321222s G s G s G s G s G s R s C +=)()()()(1)()()()()(432142121s G s G s G s G s G s G s G s R s C +=)()()()(1)()()(4321412s G s G s G s G s G s R s C +=题2-10 解:(1)3212321)()(k k k s k k k s R s C +=3212032143)()()(k k k s s G k k k s k k s N s C +⋅+=(2) 2140)(k k sk s G ⋅-= 题2-11 解:122212211111)()1()()(z z s T s T T C s T T s T k k s s m m d e L ⋅++⋅+++⋅=ΘΘ (T 1=R 1C, T 2=R 2C, T d =L a /R a , T m =GD 2R a /375C e C m )第三章 习题答案3-1. s T 15=(取5%误差带) 3-2. 1.0=H K K=2 3-3.当系统参数为:2.0=ξ,15-=s n ω时,指标计算为:%7.52%222.0114.32.01===-⨯---e eξξπσs t ns 352.033=⨯==ξωs t n p 641.02.01514.3122=-⨯=-=ξωπ当系统参数为:0.1=ξ,15-=s n ω时,系统为临界阻尼状态,系统无超调,此时有:st ns 95.057.10.145.67.145.6=-⨯=-=ωξ3-4.当110-=s K 时,代入上式得:110-=s n ω,5.0=ξ,此时的性能指标为:%3.16%225.0114.35.01===-⨯---e eξξπσs t ns 6.0105.033=⨯==ξωs t n p 36.05.011014.3122=-⨯=-=ξωπ当120-=s K 时,代入上式得:11.14-=s n ω,35.0=ξ,此时的性能指标为:%5.30%2235.0114.335.01===-⨯---e eξξπσs t ns 6.01.1435.033=⨯==ξω由本题计算的结果可知:当系统的开环放大倍数增大时,其阻尼比减小,系统相对稳定性变差,系统峰值时间变短,超调量增大,响应变快,但由于振荡加剧,调节时间不一定短,本题中的调节时间一样大。
第二章自控作业答案PPT课件
C(s)
R( s )
G1 (s)G3 (s) G2 (s)G3 (s)
1 G3 (s)H1 (s) G1 (s)G3 (s)
C(s)
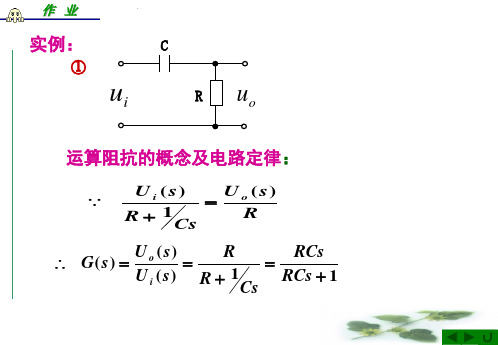
作业
2-10 绘出图示系统的信号流图,并根据梅逊公式求
传递函数。
H2(s)
R(s) X1 + X 2 G1 (s) + +
- X3 -
G1G2G3 G1G2 H1
G2G3 H 2
G4
结束语
当你尽了自己的最大努力时,失败 也是伟大的,所以不要放弃,坚持 就是正确的。
When You Do Your Best, Failure Is Great, So Don'T Give Up, Stick To The End
感谢你的到来与聆听
R
解:在静态工作点处:
+ u
ud
-
i id
ud 0 u0 i0 R 2.39 2.19 103 103 0.2(V )
did
106
ud
e 0.026
106
0.2
e 0.026 0.0843
dud ud ud 0 0.026
0.026
ud ud 0
∴在静态工作点附近的增量线性化方程为:
略去增量符号,得: id 0.0843ud
id 0.0843ud
作业
作业:
G4
R(s) + + G1
+
G2
-
-
H
G3
N (s)
+ - C(s) +
解:(1)在给定输入R(s)单独作用下,令N(s)=0,则
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
系统稳定的 K范围为0<K<1.708
3.15 已知单位反馈系统的开环传递函数 G (s)
100 s(s 10)
试求: ⑴ 位置误差系数Kp,速度误差系数Kv和加速度误差系数Ka; ⑵ 当参考输入r(t)=1 + t + at2 时,系统的稳态误差。
解:首先判断系统稳定性。可知系统稳定。
(1) K p , Kv 10, Ka 0
3.3
1 设单位负反馈系统的开环传递函数为 G (s) s(s 1) 求系统单位阶跃响应过渡过程的上升时间tr、峰值时间tp、超 调量σ%和调节时间ts。
2 n 1 n 1, 0.5 2 n 1
解:
arccos tr 2.42s d n 1 2 tp 3.63s d 1 2
10 1 4.7 2 3.26 4.7
5 1
2 0
3 2 10 0 2 1
2
所以,系统不稳定。
3.11 已知单位反馈系统的开环传递函数为
K (0.5s 1) ,试确定系统稳定时的K值范围。 G( s) 2 s(s 1)(0.5s s 1)
解:D(s)=s(s+1)(0.5s2+s+1)+K(0.5s+1)
n
% e
100% e 3 ts 6s n
d
1 2
100% 16.3%
3.9(1) 设系统特征方程为3s4+10s3+5s2+s+2=0;试用劳斯稳
定判据判别系统稳定性。 解:列出劳斯表
s4 3 s s
2
3 10 3 5 10 1 4.7 10
(2)
2D(s)=s4+3s3+4s2+(2+K)s+2K
s 3 s 2 s
4
1 3
4 2+K
2K
s
K 10 2K 3 (10 k)(2 k) 0 1 6K 3 s K 10 0 3
2K
K 10 0 3 (10 k )(2 k ) 6K 3 0 K 10 3 2K 0