自动控制原理西北工大版习题解答第四章Word版
自动控制原理 课后习题答案(2020年7月整理).pdf

第1章控制系统概述【课后自测】1-1 试列举几个日常生活中的开环控制和闭环控制系统,说明它们的工作原理并比较开环控制和闭环控制的优缺点。
解:开环控制——半自动、全自动洗衣机的洗衣过程。
工作原理:被控制量为衣服的干净度。
洗衣人先观察衣服的脏污程度,根据自己的经验,设定洗涤、漂洗时间,洗衣机按照设定程序完成洗涤漂洗任务。
系统输出量(即衣服的干净度)的信息没有通过任何装置反馈到输入端,对系统的控制不起作用,因此为开环控制。
闭环控制——卫生间蓄水箱的蓄水量控制系统和空调、冰箱的温度控制系统。
工作原理:以卫生间蓄水箱蓄水量控制为例,系统的被控制量(输出量)为蓄水箱水位(反应蓄水量)。
水位由浮子测量,并通过杠杆作用于供水阀门(即反馈至输入端),控制供水量,形成闭环控制。
当水位达到蓄水量上限高度时,阀门全关(按要求事先设计好杠杆比例),系统处于平衡状态。
一旦用水,水位降低,浮子随之下沉,通过杠杆打开供水阀门,下沉越深,阀门开度越大,供水量越大,直到水位升至蓄水量上限高度,阀门全关,系统再次处于平衡状态。
开环控制和闭环控制的优缺点如下表1-2 自动控制系统通常有哪些环节组成?各个环节分别的作用是什么?解:自动控制系统包括被控对象、给定元件、检测反馈元件、比较元件、放大元件和执行元件。
各个基本单元的功能如下:(1)被控对象—又称受控对象或对象,指在控制过程中受到操纵控制的机器设备或过程。
(2)给定元件—可以设置系统控制指令的装置,可用于给出与期望输出量相对应的系统输入量。
(3)检测反馈元件—测量被控量的实际值并将其转换为与输入信号同类的物理量,再反馈到系统输入端作比较,一般为各类传感器。
(4)比较元件—把测量元件检测的被控量实际值与给定元件给出的给定值进行比较,分析计算并产生反应两者差值的偏差信号。
常用的比较元件有差动放大器、机械差动装置和电桥等。
(5)放大元件—当比较元件产生的偏差信号比较微弱不足以驱动执行元件动作时,可通过放大元件将微弱信号作线性放大。
《自动控制原理》章节习题含答案(大学期末复习资料).doc

自动控制原理(1) 生活中有哪些物理量之间是比例关系、积分关系或微分关系?答:单价一定时,总价与数量成比例;速度一定时,总路程与时间成比例。
加速度的积分是速度,速度的积分是路程;反之,速度的微分是加速度,路程的微分是路程。
(2) 常用的数学模型有哪些?答:常用的数学模型有:微分方程、传递函数、系统框图、频率特性和状态方程。
(3) 传递函数的定义是什么,定义传递函数的前提条件是什么?如何将微分方程转换为传递函数?答:传递函数(Transfer Function)定义如下,在零初始条件下,线性定常系统(或元件) 输出量的拉氏变换与其输入量的拉氏变换之比,即为线性定常系统的传递函数,记为G(s), 即u. 输出量的拉氏变换传递函数G(s)= -------------------------------输入量的拉氏变换零初始条件(4) 典型输入信号有哪些,分别适用于作为哪些控制系统的输入?答:常用的典型输入信号有:阶跃信号(Step signal)、斜坡信号(Slope signal)>加速度信号(Acceleration signal)、脉冲信号(Pulse signal)及正弦信号(sinusoidal signaDo实际的控制系统中,室温控制系统和水位控制系统,以及一些工作状态突然改变或突然受到恒定输入作用的控制系统,都可以采用阶跃信号作为典型输入信号。
跟踪通信卫星的天线控制系统、数控机床加工斜面的进给控制系统、机械手的等速移动控制系统等其输入信号随时间逐渐变化的控制系统,斜坡信号是比较合适的典型输入。
当控制系统的输入信号为冲击输入,例如脉冲电信号、撞击力、武器弹射的爆发力等, 均可视为理想脉冲信号。
实际的控制系统中,如果输入信号为周期性变化的信号,一般都可将其进行傅里叶变换为多个正弦信号的叠加,这种情况下,可用正弦函数作为系统的输入对系统进行性能分析。
(5) 比例系数、积分时间常数和微分时间常数分别对系统的时域响应有什么影响?答:当比例系数(增益)K>1时,输出量为输入量等比例放大;当K<1时,输出量为输入量等比例缩小;当K=1时,输出量与输入量相等。
自动控制原理课后习题第四章答案

G(s)H(s)=
Kr s(s+1)(s+3)
σ根 s=3-K+ω轨r4-3-迹+p4s132ω1-3的+~3ω32分p===s2-离+001K点.p-3r=3:KK~0θrr===012+ωω6021,o=3,=0+±1810.7o
8
jω
1.7
s1
A(s)B'系(s)统=根A'轨(s迹)B(s)
s3 p3
s=sK2±r没=j24有.8.6位×于2K.r根6=×4轨80.迹6=上7,. 舍去。
2
第四章习题课 (4-9)
4-9 已知系统的开环传递函数,(1) 试绘制出
根轨迹图。
G(s)H与(s虚)=轴s交(0点.01s+1K)(系0.统02根s+轨1迹)
jω
70.7
解: GKK(rr=s=)10H5(0s)=ωω2s1,(3=s=0+±17000K.7)r(s+50)
s1
A(s)B'(系s)统=A根'(轨s)迹B(s)
s3 p3
p2
p1
-4
-2
0
((24))ζ阻=尼03.振5s2荡+1响2应s+s的81==K-r0值0.7范+围j1.2
s=s-s10=3=.-80-56.8+50K.7r×=20=s.82-=54×-.631..1155×3.15=3.1
-2.8
450
1080
360
0σ
0σ
第四章习题课 (4-2)
4-2 已知开环传递函数,试用解析法绘制出系
统的根轨迹,并判断点(-2+j0),(0+j1),
国防《自动控制原理》教学资料包 课后习题答案 第四章

第4章课后习题参考答案4-1(a)(b)(c)(d)4-2(1)(2)4-3(1)(2)(j 24.20 ),K=10.14 4-4 (1)(2)(3)4-5(1)0>K (2)2>K 4-6(1)(2) 闭环极点(j 7.597.0±-),K=34.77 4-7 (1)110222-=+++s s s a(2)130202-=+ss a4-8正反馈 负反馈表明K>0对于正反馈系统不稳定,负反馈系统稳定。
4-90.707ξ=,系统开环传递函数为)4(8)(+=s s s G ,系统的单位阶跃响应为)(t h =)452sin(5.012 +--t e t4-10σωj 007.17-93.2-5-10-(1) K=5;(2)不含有衰减振荡分量的K 值范围为86.00<<K 或29>K 。
4-11 系统的开环极点为0和-p ,开环零点为-z 。
由根轨迹的幅角条件, 得π)12()()(+=+∠-∠-+∠q p s s z s 。
将ωσj s +=代入,整理有pz++︒=-+---σωσωσω111tan 180tan tan取上述方程两端的正切,并利用下列关系yx yx y x tan tan 1tan tan )tan( ±=±有p z z +=++-σωωσσω2)(,则zp z z -=++222)(ωσ,这是一个圆的方程,圆心位于(-z ,j 0)处,而半径等于zp z -2(注意,圆心位于开环传递函数的零点上)。
证毕。
4-12(1)分离点-0.465,对应K=0.88;虚轴的交点j 2± (2)88.00<<K ,阶跃响应不出现超调。
4-13(1)(2)70MAX K =4-14负反馈稳定K 值范围为0<K<73.8,正反馈稳定K 值范围为0<K<35,所以确定根轨迹增益K 的范围为0<K<35。
《自动控制原理》西北工业大学参考题整理
《自动控制原理》西北工业大学参考题整理西北工业大学《自动控制原理》参考习题1-3、1-4;2-1(c)&(d)、2-6、2-8、2-10、2-11、2-12、2-133-1、3-3、3-4、3-6、3-7、3-9、3-11、3-13、3-15、3-16、3-17、3-21、3-22、3-23、3-24、3-28(1)、3-38、3-394-2、4-3(1)&(3)5-1、5-2(1)、5-3、5-6、5-9(1)&(2)&(3)、5-11(1)、5-13(1)~(4)6-2、6-3、6-4、6-5(1)、6-6、6-7、6-8、6-10(1)、6-12、6-13、6-16第一章习题及答案1-3、1-41-3 题1-3图为工业炉温自动控制系统的工作原理图。
分析系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。
题1-3图 炉温自动控制系统原理图解 加热炉采用电加热方式运行,加热器所产生的热量与调压器电压c u 的平方成正比,c u 增高,炉温就上升,c u 的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动机驱动。
炉子的实际温度用热电偶测量,输出电压f u 。
f u 作为系统的反馈电压与给定电压r u 进行比较,得出偏差电压e u ,经电压放大器、功率放大器放大成a u 后,作为控制电动机的电枢电压。
在正常情况下,炉温等于某个期望值T °C ,热电偶的输出电压f u 正好等于给定电压r u 。
此时,0=-=f r e u u u ,故01==a u u ,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使c u 保持一定的数值。
这时,炉子散失的热量正好等于从加热器吸取的热量,形成稳定的热平衡状态,温度保持恒定。
当炉膛温度T °C 由于某种原因突然下降(例如炉门打开造成的热量流失),则出现以下的控制过程:控制的结果是使炉膛温度回升,直至T °C 的实际值等于期望值为止。
自动控制原理第4章习题解——邵世凡
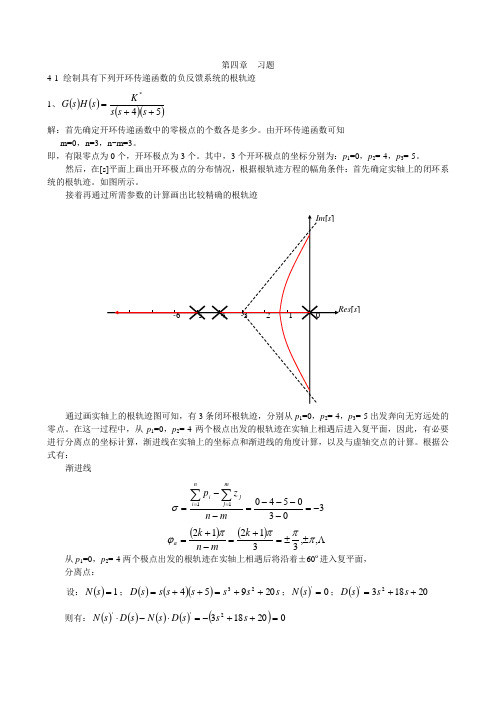
第四章 习题4-1 绘制具有下列开环传递函数的负反馈系统的根轨迹1、()()()()54*++=s s s K s H s G解:首先确定开环传递函数中的零极点的个数各是多少。
由开环传递函数可知 m=0,n=3,n -m=3。
即,有限零点为0个,开环极点为3个。
其中,3个开环极点的坐标分别为:p 1=0,p 2=-4,p 3=-5。
然后,在[s]平面上画出开环极点的分布情况,根据根轨迹方程的幅角条件:首先确定实轴上的闭环系统的根轨迹。
如图所示。
接着再通过所需参数的计算画出比较精确的根轨迹通过画实轴上的根轨迹图可知,有3条闭环根轨迹,分别从p 1=0,p 2=-4,p 3=-5出发奔向无穷远处的零点。
在这一过程中,从p 1=0,p 2=-4两个极点出发的根轨迹在实轴上相遇后进入复平面,因此,有必要进行分离点的坐标计算,渐进线在实轴上的坐标点和渐进线的角度计算,以及与虚轴交点的计算。
根据公式有:渐进线303054011-=----=--=∑∑==mn zp n i mj jiσ()() ,,331212ππππϕ±±=+=-+=k mn k a从p 1=0,p 2=-4两个极点出发的根轨迹在实轴上相遇后将沿着±60º进入复平面,分离点:设:()1=s N ;()()()s s s s s s s D 2095423++=++=;()0'=s N ;()201832'++=s s s D则有:()()()()()0201832''=++-=⋅-⋅s s s D s N s D s N[s ]0201832=++s s解得方程的根为s 1= -4.5275(不合题意舍去);s 2= -1.4725 得分离点坐标:d = -1.4725。
与虚轴的交点:在交点处,s=j ω,同时也是闭环系统的特征根,必然符合闭环特征方程,于是有:()020********=++--=+++*=*K j j K s s sj s ωωωω整理得: 0203=-ωω;092=-*ωK 解得01=ω;203,2±=ω;18092==*ωK 最后,根据以上数据精确地画出根轨迹。
自动控制原理第4章课后习题答案

第4章4-1 已知系统的开环传函如下,试绘制系统参数K 从0→∞时系统的根轨迹图,对特殊点要加以简单说明. (1) ()()(4)(1)(2)K s G s H s s s s +=++ (2) ()()2(4)(420)KG s H s s s s s =+++ 解:(1)有3个开环几点,1个开环零点,固有3条根轨迹分别始于0,-1,-2; 1条根轨迹终于-4,另外2条根轨迹趋于无穷远处 实轴上的根轨迹分布在-1~0之间及-4~-2之间 渐近线条数为n-m=3-1=2 渐进线的交点12041312σ++-=-=-渐近线的倾角90θ︒=±分离点22[()()]02152480d G s H s s s s ds =⇒+++= 解得: 12s =- 其它舍去求与虚轴交点:令s j ω=代入特征方程(1)(2)(4)0s s s K s ++++=中得(1)(2)(4)0j j j K j ωωωω++++= 令上式两边实部和虚部分别相等,有226430(2)0 2.83K K K ωωωω⎧=⎧-=⎪⎪⇒⎨⎨+-==±=±⎪⎪⎩⎩绘制系统根轨迹,如图4-1(1)(2)有4个开环几点,无开环零点,有4条根轨迹,分别起始于0,-4, 24j -±终于无穷远处 实轴上的根轨迹分布在-4~0之间; 渐近线条数为n-m=4-0=4 渐进线的交点04242424j j σ++++-=-=-渐近线的倾角45,135θ︒︒=±±分离点22[()()]042472800d G s H s s s s ds=⇒+++=解得: 2s =-由()()1G s H s =得21224(2)4220K=--+--⨯+, K=64绘制系统根轨迹,如图4-1(2)图4-1(1)图4-1(2)4-2 已知系统的开环传函为(2)(3)()()(1)K s s G s H s s s ++=+(1) 试绘制系统参数K 从0→∞时系统的根轨迹图,求取分离点和会和点 (2) 试证明系统的轨迹为圆的一部分解:有2个开环极点,2个开环零点,有2条根轨迹,分别起始于0,-1; 终于-2,-3;实轴上的根轨迹分布在-3~-2之间及-1~0之间分离会和点2221,2,321[()()]02401,12123(2)()()()[()()]0[2(6)4]0203602,18()()[()()]00020,d G s H s s ds KK K s G s H s s s a d G s H s s s a s a dsa a a a s KG s H s sd G s H s s ds a s s =⇒+===-+⨯-++=+=⇒+++=⇒-+≥⇒≤≥===⇒=≤≤=23s ==解得:当10.634s =-时 由()()1G s H s =得(0.6342)(0.6343)10.070.6340.6341K K -+-+=⇒=-⨯-+当2 2.366s =-时 同理 K=13.9 绘制系统根轨迹 如图4-2证明:如果用s j αβ=+代入特征方程1()()0G s H s +=中,并经整理可得到以下方程式:2233()24αβ++=(注:实部虚部相等后消K 可得)显然,这是个圆的方程式,其圆心坐标为3(,0)2-,半径为2图4-24-3 已知系统的开环传函()()(1)(3)KG s H s s s =++(1) 试绘制系统参数K 从0→∞时系统的根轨迹图(2) 为了使系统的阶跃响应呈现衰减振荡形式,试确定K 的范围 解:有2个开环极点,无开环零点,有2条根轨迹,分别起始于-1,-3; 终于无穷远处;实轴上的根轨迹分布-3~-1之间; 渐近线条数2; 渐近线的交点13022σ+-=-=- 渐近线的倾角90θ︒=± 分离会和点[()()]0240d G s H s s ds=⇒+=解:S=-2由()()1G s H s =得1,12123KK ==-+⨯-+绘制系统根轨迹图4-3由图知 当1<K<+∞时系统的响应呈现衰减振荡形式4-4 设负反馈控制系统的开环传函为2(2)()()()K s G s H s s s a +=+试分别确定使系统根轨迹有一个,两个和三个实数分离点的a 值,分别画出图形 解:求分离点2[()()]0[2(6)4]0d G s H s s s a s a ds=⇒+++=解得s=0,或分离点为实数2203602a a a ⇒-+≥⇒≤或18a ≥当a=18时 实数分离点只有s=0 如图4-4(1)当a>18时 实数分离点有三个,分别为1,2,3(6)0,4a s -+=如图4-4(2)当a=2时2()()K G s H s s =分离点[()()]00d G s H s s ds=⇒= 即分离点只有一个s=0 如图4-4(3) 当02a ≤≤分离点有一个s=0 如图4-4(4) 当a<0时 分离点有1230,s s s ===(舍去)如图4-4(5)综上所述:当a=18,0≤a ≤2时,系统有一个分离点 当a >18时,系统有三个实数分离点 当a <0时,系统有两个分离点a=18图4-4(1) a=2图4-4(2)图4-4(3) a=1图4-4(4)图4-4(5)4-65 已知系统的开环传递函数为3(1)(3)()()K S S G S H S S++=(1)绘制系统的根轨迹。
自动控制原理课后习题第四章答案

然后,根据闭环传递函数的定义,闭环传递函数F(s)=G(s)/(1+G(s)H(s))。
解析3
将G(s)H(s)代入闭环传递函数的定义中,得到F(s)=100/((s+1)^2+3)/(1+100/((s+1)^2+4)((s+1)^2+3))。
解析4
化简得到F(s)=100/((s+1)^2+3)(4((s+1)^2+3))=400/(4(s^2+2s+3))。
1)(s + 2)/(s^2 + 3s + 2)。
04
题目四答案
题目内容
• 题目四:已知系统的开环传递函数为 G(s)H(s)=K/(s^2+2s+2),其中K>0,试 求系统的闭环极点和稳定性。
答案解析
闭环极点
根据开环传递函数,我们可以求出闭环传递函数为 G(s)H(s)/(1+G(s)H(s)),然后求出闭环极点。由于开环传递函 数为K/(s^2+2s+2),所以闭环极点为-1±√2i。
标准形式,即 G(s)H(s) = (s + 1)(s + 2)/(s^2 + 3s + 2)。
02
解析二
根据开环传递函数的分子和分母,可以得出系统的开环传递函数为
G(s)H(s) = (s + 1)(s + 2)/(s^2 + 3s + 2)。
03
解析三
根据开环传递函数,可以求出系统的闭环传递函数为 G(s)H(s) = (s +
自动控制原理课后习题第四章 答案
《自动控制原理》-卢京潮主编-西北工业大学(清华大学)-第四章习题及答案
解 ⑴ G(s) =
K * (s + 2)
(s + 1 + j2)(s + 1 − j2)
根轨迹绘制如下:
① 实轴上的根轨迹: (− ∞,−2]
② 分离点: 1 + 1 = 1 d +1+ j2 d +1− j2 d + 2
解之得: d = −4.23
③ 起始角:
θ p1 = 180o + 63.435o − 90o = 153.435o 由对称性得另一起始角为 −153.435o 。
令
⎧Re[D( jω)] = −7ω 2 + 10K = 0
⎨ ⎩
Im[D(
jω)]
=
−ω 3
+ 10ω
=
0
解得
⎧ω ⎨
=
10
⎩ K =7
与虚轴的交点(0, ± 10 j )。 根轨迹如图解 4-2(a)所
示。 ⑵ 根轨迹绘制如下:
① 实轴上的根轨迹:[− 5,−3], [− 2,0]
② 渐近线: ③ 分离点:
⎧ω = 0
解得:
⎨ ⎩K
∗
=
0
④ 起始角
⎧ω = ±1.61
⎨ ⎩K
∗
=
7.03
图解 4-3 (d) 系统根轨迹
θp3 =180°+45°−90°−135°−25.57° = −25.57°
根轨迹如图解 4-3(d)所示。
4-4 已知单位反馈系统的开环传递函数,要求:
(1)确定 G(s)
=
K ∗(s + z) s2 (s + 10)(s + 20)
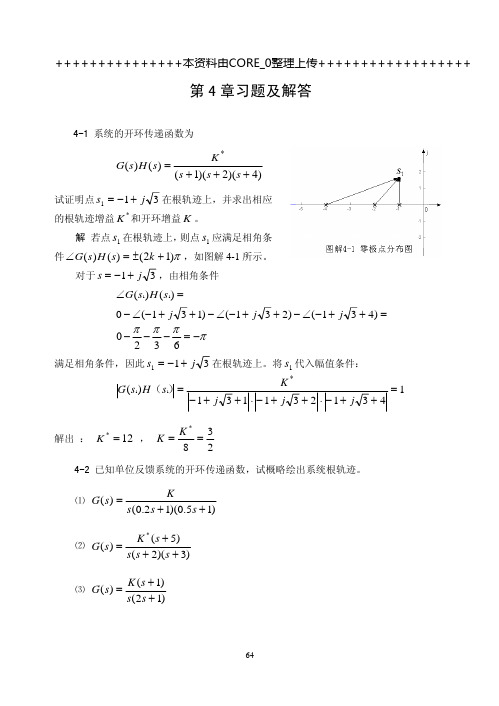
解 若点 s1 在根轨迹上,则点 s1 应满足相角条 件 ∠G(s)H (s) = ±(2k + 1)π ,如图解 4-1 所示。
(完整版)自动控制原理课后习题及答案
第一章绪论1-1 试比较开环控制系统和闭环控制系统的优弊端.解答: 1 开环系统(1)长处 :构造简单,成本低,工作稳固。
用于系统输入信号及扰动作用能早先知道时,可获得满意的成效。
(2)弊端:不可以自动调理被控量的偏差。
所以系统元器件参数变化,外来未知扰动存在时,控制精度差。
2闭环系统⑴长处:不论因为扰乱或因为系统自己构造参数变化所惹起的被控量偏离给定值,都会产生控制作用去消除此偏差,所以控制精度较高。
它是一种按偏差调理的控制系统。
在实质中应用宽泛。
⑵弊端:主要弊端是被控量可能出现颠簸,严重时系统没法工作。
1-2什么叫反应?为何闭环控制系统常采纳负反应?试举例说明之。
解答:将系统输出信号引回输入端并对系统产生控制作用的控制方式叫反应。
闭环控制系统常采纳负反应。
由1-1 中的描绘的闭环系统的长处所证明。
比如,一个温度控制系统经过热电阻(或热电偶)检测出目前炉子的温度,再与温度值对比较,去控制加热系统,以达到设定值。
1-3试判断以下微分方程所描绘的系统属于何种种类(线性,非线性,定常,时变)?2 d 2 y(t)3 dy(t ) 4y(t ) 5 du (t ) 6u(t )(1)dt 2 dt dt(2) y(t ) 2 u(t)(3)t dy(t) 2 y(t) 4 du(t) u(t ) dt dtdy (t )u(t )sin t2 y(t )(4)dtd 2 y(t)y(t )dy (t ) (5)dt 2 2 y(t ) 3u(t )dt(6)dy (t ) y 2 (t) 2u(t ) dty(t ) 2u(t ) 3du (t )5 u(t) dt(7)dt解答: (1)线性定常(2)非线性定常 (3)线性时变(4)线性时变(5)非线性定常(6)非线性定常(7)线性定常1-4 如图 1-4 是水位自动控制系统的表示图, 图中 Q1,Q2 分别为进水流量和出水流量。
控制的目的是保持水位为必定的高度。
自动控制原理课后答案第4章

i
sz
j 1
j
1
相角条件
m j j 1 n i i 1
(s z ) (s p ) (2k 1) ,
4、根轨迹绘制的基本规则 绘制根轨迹的 9 条基本规则归纳如下:
表 4-1 绘制根轨迹的基本规则
序号 1 2 3 名 称
k 0, 1, 2,
规 根轨迹具有连续性,且关于实轴对称 根轨迹的分支数与开环极点数 n 相等
i 1 j 1 j g
根轨迹与虚轴交点的坐标和临界开环根轨迹增益 K*,可由下列方法之一确定: 8 根轨迹与虚轴的交点 ① 利用劳斯判据计算 ② 用 s=jω 代入闭环特征方程式求解 根之和: sl pi (n-m≥2)
l 1 i 1 n n
9
根之和与根之积
根之积: ( 1)
n n m
( 1) n sl ( 1)n pi (1) m K z j
l 1 i 1 j 1
若系统无开环零点,则上式可简化为如下形式:
n n
( 1) n sl ( 1)n pi K
l 1 i 1
利用这一关系,可用来求解已知闭环特征根所对应的 K*值。 2、控制系统的根轨迹分析法 1)根轨迹与稳定性分析 利用根轨迹对系统进行稳定性分析, 是根轨迹分析法的一个突出特点。 对于稳定的系统 来说,其闭环特征根必然全部位于[s] 左半平面,而且其离虚轴距离越远,相对稳定性就越 好。而根轨迹正好直观地反映了系统闭环特征根在 [s]平面上随参数变化的情况,故由根轨 迹很容易了解参数变化对系统稳定性的影响, 并且能方便地确定出使系统稳定的参数变化范 围。 2)根轨迹与动态性能分析 高阶系统的动态性能基本是由接近虚轴的闭环极点确定的。因此,把那些既靠近虚轴, 又不十分接近闭环零点的闭环极点称为主导极点。 主导极点对系统性能的影响最大, 而那些 比主导极点的实部大 5 倍以上的其它闭环零、极点,其对系统的影响均可忽略。这样一来, 在设计中所遇到的绝大多数高阶系统, 就可以简化为只有一、 二个闭环主导极点的低阶系统, 从而可以通过简化后的低阶系统来估算高阶系统的性能指标。 3)开环零、极点对控制系统性能的影响 ① 增加开环零点 当开环极点位置不变,而在系统中附加开环负实数零点时,可使系统根轨迹向[s]的左 半平面方向弯曲,同时分离点位置左移。或者说,附加开环负实数零点后,可使系统根轨迹 发生趋向于附加零点方向的变形,而且这种影响将随开环零点接近坐标原点的程度而加强。 如果附加零点不是负实数零点, 而是具有负实部的共轭复数零点, 那么它们的作用与负实数 零点的作用完全相同。因此,在[s]的左半平面内的适当位置上附加开环零点,可以显著提 高系统的稳定性。除此之外,还可对系统的动态性能有明显改善。然而,附加开环零点位置
《自动控制原理》课后习题答案
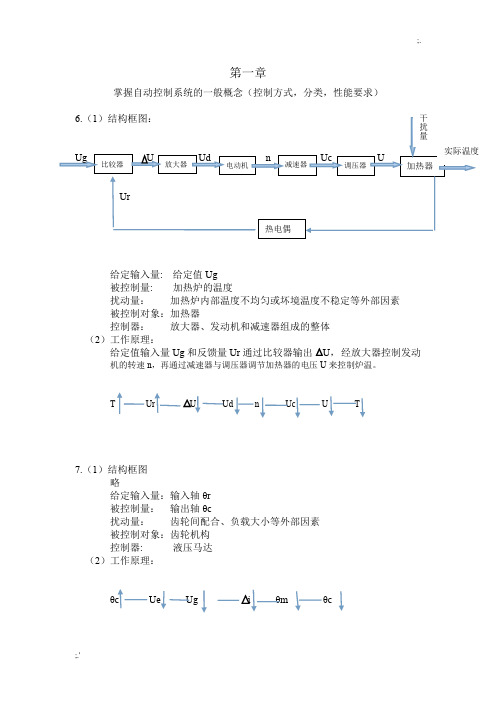
掌握自动控制系统的一般概念(控制方式,分类,性能要求)6.(1)结构框图:Ug U Udn Uc UUr给定输入量: 给定值Ug 被控制量: 加热炉的温度扰动量: 加热炉内部温度不均匀或坏境温度不稳定等外部因素 被控制对象:加热器控制器: 放大器、发动机和减速器组成的整体 (2)工作原理:给定值输入量Ug 和反馈量Ur 通过比较器输出 U , 经放大器控制发动机的转速n ,再通过减速器与调压器调节加热器的电压U 来控制炉温。
T Ur U Ud n Uc U T7.(1)结构框图 略给定输入量:输入轴θr 被控制量: 输出轴θc扰动量: 齿轮间配合、负载大小等外部因素 被控制对象:齿轮机构 控制器: 液压马达 (2)工作原理:θc Ue Ug i θm θc比较器 放大器 减速器 调压器 电动机 加热器 热电偶干扰量实际温度掌握系统微分方程,传递函数(定义、常用拉氏变换),系统框图化简;1.(a)⎪⎪⎪⎩⎪⎪⎪⎨⎧=+=+=dtdu C i R u i i u iR u t ct ct t r )(02)(0)(01)()2......()1(.......... 将(2)式带入(1)式得:)()(01)(021)(0t r t t t u dtdu C R u R R u =++拉氏变换可得)()(01)(0221s r s s U CsU R u R R R =+⎪⎪⎭⎫ ⎝⎛+整理得 21212)()(0)(R R Cs R R R U U G S r S s ++==1.(b)⎪⎪⎪⎩⎪⎪⎪⎨⎧=+=+=dtdi L u R u i i u iR u Lt o t Lt t r )(2)(0)(01)()2........()1......(.......... 将(2)式代入(1)式得)()(0221)(01t r t t u u R R R dt u L R =++⎰ 拉氏变换得)()(0221)(01s r s s U U R R R U Ls R =++ 整理得LsR R R R LsR U U G s r s s )(21212)()(0)(++==2.1)微分方程求解法⎪⎪⎪⎩⎪⎪⎪⎨⎧+=-=+=-31224203221211111Rudt du c Ruu R u R u Rudt du c R u u c c c c c c c c r中间变量为1c u,2c u及其一阶导数,直接化简比较复杂,可对各微分方程先做拉氏变换⎪⎪⎪⎩⎪⎪⎪⎨⎧+=-=+=-3122423221211111RUU sc R U U RU R U RUU sc R U U c c c c c c c c r移项得⎪⎪⎪⎩⎪⎪⎪⎨⎧++==++=2432432211211)11()111(c c c c rUR R sc RU R RU U U R R sc R U可得11121432432143214320)111()11(RR sc R R R R sc R R R R R R R R sc R R sc Ur U ++++=++++=2)复阻抗法⎪⎪⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎪⎪⎨⎧+=+++=++=2211232223234212121111*11*11sc R sc z U sc R sc z U sc R sc R R z sc R sc R R z r解得:1112143243RR sc R R R R sc R R Ur U ++++=3.分别以m 2,m 1为研究对象(不考虑重力作用)⎪⎪⎩⎪⎪⎨⎧--=---=11212121121222222)()()(ky dty y d c dt y d m dty y d cdt dy c t f dt y d m 中间变量含一阶、二阶导数很难直接化简,故分别做拉氏变换⎪⎩⎪⎨⎧--=---=112112112122222)()()(kY Y Y s c Y s m Y Y s c sY c s F Y s m 消除Y1中间变量21211222))1(()(Yk s c s m sc s c s c s m s F s++-++=10.系统框图化简:G 1(s)G 2(s)G 3(s)X i (s)X o (s)+H 1(s)H 3(s)H 2(s)---++G 1(s)G 2(s)G 3(s)X i (s)X o (s)+H 1(s)H 3(s)H 2(s)/G 1(s)G 3(s)---+G 1(s)/(1+G 1(s)H 1(s))G 2(s)G 3(s)/(1+G 3(s)H 3(s))X i (s)X o (s)+H 2(s)/G 1(s)G 3(s)-G 1(s)G 2(s)G 3(s)/(1+G 1(s)H 1(s))(1+G 3(s)H 3(s))X i (s)X o (s)+H 2(s)/G 1(s)G 3(s)- +1.综合点前移,分支点后移G 1(s)G 2(s)G 3(s)X i (s)X o (s)+H 1(s)H 3(s)H 2(s)/G 1(s)G 3(s)---++2.交换综合点,交换分支点3.化简1231133221231133221133()()()()()(1()())(1()())()()()()()1()()()()()()()()()()o i X s G s G s G s X s G s H s G s H s G s H s G s G s G s G s H s G s H s G s H s G s H s G s H s =+++=++++11.系统框图化简:G 1(s)G 2(s)G 3(s)X i (s)X o (s)+H 1(s)-++ 1.综合点前移,分支点后移2.交换综合点,合并并联结构H 4(s)G 4(s)H 2(s)H 3(s)++--G 1(s)G 2(s)G 3(s)X i (s)X o (s)+H 1(s)/G 1(s)G 4(s)-+H 4(s)/G 1(s)G 2(s)G 4(s)H 2(s)/G 4(s)H 3(s)++--+-G 1(s)G 2(s)G 3(s)X i (s)X o (s)+-G 4(s)H 2(s)/G 4(s)-H 3(s)-H 1(s)/G 1(s)G 4(s)+H 4(s)/G 1(s)G 2(s)3.化简G 1(s)G 2(s)G 3(s)G 4(s)X i (s)X o (s)+-H 2(s)/G 4(s)-H 3(s)-H 1(s)/G 1(s)G 4(s)+H 4(s)/G 1(s)G 2(s)12341234243114412123123212343231344()()()()()()1()()()()(()/()()()/()()()/()())()()()1()()()()()()()()()()()()()()(o i X s G s G s G s G s X s G s G s G s G s H s G s H s H s G s G s H s G s G s G s G s G s G s G s G s H s G s G s G s G s H s G s G s H s G s G s H =+--+=+--+)s第三章掌握时域性能指标,劳斯判据,掌握常用拉氏变换-反变换求解时域响应,误差等2.(1)求系统的单位脉冲响应12()()()TsY(s)+Y(s)=KX(s)X(s)=1Y(s)=1()=20e t tTT y t y t Kx t K Ts k w t e T∙--+=+=已知系统的微分方程为:对微分方程进行零初始条件的拉氏变换得当输入信号为单位脉冲信号时,所以系统输出的拉式变换为:进行拉式反变换得到系统的时域相应2.(2)求系统的单位阶跃响应,和单位斜坡响应22()()()TsY(s)+Y(s)=KX(s)X(s)=5Y(s)=1111110()10-10e ;1X(s)=Y(s)=t T y t y t Kx t KTK Ts Ts Ts sK s s s y t s∙-+=+++=-=-=已知系统的微分方程为:对微分方程进行零初始条件的拉氏变换得当输入信号为单位阶跃信号时,所以系统输出的拉式变换为:进行拉式反变换得到系统的时域相应当输入信号为单位阶跃信号时,所以系统输出的拉式变换为:22222110550111()510t+5e ;t K K KT T K Ts s s s Ts s s Ts y t -=-+=-++++=-+进行拉式反变换得到系统的时域相应9.解:由图可知该系统的闭环传递函数为22()(22)2b kG s s k s kτ=+++ 又因为:2122%0.20.512222r n n n e t k kπξξσπβωξξωτω--⎧⎪==⎪-⎪==⎨-⎪=+⎪⎪=⎩ 联立1、2、3、4得0.456; 4.593;10.549;0.104;n K ξωτ==== 所以0.76931.432p ds nt s t sπωξω====10.解:由题可知系统闭环传递函数为210()1010b kG s s s k=++ 221010n nk ξωω=⎧⎪⎨=⎪⎩ 当k=10时,n ω=10rad/s; ξ=0.5;所以有2/12%16.3%0.36130.6p n s n e t s t sπξξσπωξξω--⎧⎪==⎪⎪⎪==⎨-⎪⎪⎪==⎪⎩当k=20时,n ω=14.14rad/s; ξ=0.35;所以有2/12%30.9%0.24130.6pn s n e t s t sπξξσπωξξω--⎧⎪==⎪⎪⎪==⎨-⎪⎪⎪==⎪⎩当0<k<=2.5时,为过阻尼和临界阻尼,系统无超调,和峰值时间;其中调整时间不随k 值增大而变化; 当k>2.5时,系统为欠阻尼,超调量σ%随着K 增大而增大,和峰值时间pt 随着K 增大而减小;其中调整时间s t 不随k 值增大而变化;14.(1)解,由题可知系统的闭环传递函数为32560-1403256000056014014k 00()1440kb k k k s s s ks kG s s s s k->><<∴=+++∴⎧⎨⎩∴劳斯表系统稳定的充要条件为:14.(2)解,由题可知系统的闭环传递函数为320.60.8832430.60.80010.20.80.210.8k 00(1)()(1)k b k k k kk s s s ks k s G s s s k s k-->>>>-∴+=++-+∴⎧⎪⎨⎪⎩∴劳斯表系统稳定的充要条件为:20.解:由题可知系统的开环传递函数为(2)()(3)(1)k k s G s s s s +=+-当输入为单位阶跃信号时,系统误差的拉氏变换为11()111()lim limlim ()0k ss k ssss s s k s ss G s E G s ssE G s e →→→+=+===∞∴=又根据终值定理e 又因为25.解:由题可知系统的开环传递函数为1212()(1)(1)k k k G s T s T s =++当输入为给定单位阶跃信号时1()i X s s=,系统在给定信号下误差的拉氏变换为111211211()111()lim limlim ()11k ss k ss ss s s k s ss G s E G s ssE G s k k e k k →→→+=+===∴=+又根据终值定理e 又因为当输入为扰动信号时1()N s s=,系统扰动信号下误差的拉氏变换为22121122212212121()111()lim limlim ()111k ss k ss ss s s k s ss ss ss ss k G s k T s E G s ssE G s k k k e k k k e e e k k →→→-+-+=+===-∴=+-∴=+=+又根据终值定理e 又因为第四章 根轨迹法掌握轨迹的概念、绘制方法,以及分析控制系统4-2 (2)G(s)=)15.0)(12.0(++s s s K;解:分析题意知:由s(0.2s+1)(0.5s+1)=0得开环极点s 1=0,s 2=-2,s 3=-5。
自动控制原理第四版习题答案

鲁棒控制系统的设计目标是使系统在不确定性和干扰作用下 仍能保持其稳定性和性能。
03
鲁棒控制理论中常用的方法有鲁棒性分析、鲁棒控制器设计 等。
06
习题答案解析
第1章习题答案解析
1.1
简述自动控制系统的基本组成。答案:一个典型的自动控制系统由控制器、受控对象、执行器、传感 器等部分组成。
1.2
简述开环控制系统和闭环控制系统的区别。答案:开环控制系统是指系统中没有反馈环节的系统,输 出只受输入的控制,结构相对简单;而闭环控制系统则有反馈环节,输出对输入有影响,结构相对复 杂。
20世纪60年代末至70年代,主要研究多变量线 性时不变系统的最优控制问题,如线性二次型最 优控制、极点配置等。
智能控制理论
20世纪80年代至今,主要研究具有人工智能的 控制系统,如模糊逻辑控制、神经网络控制等。
02
控制系统稳定性分析
稳定性定义
01
内部稳定性
系统在平衡状态下受到扰动后,能 够回到平衡状态的性能。
步骤
时域分析法包括对系统进行数学建模、 系统稳定性分析、系统性能分析和系 统误差分析等步骤。
缺点
时域分析法需要对系统的数学模型进 行详细的分析,对于复杂系统的分析 可能会比较困难。
频域分析法
步骤
频域分析法包括对系统进行数学建模、系 统稳定性分析和系统性能分析等步骤。
定义
频域分析法是在频率域中对控制系 统进行分析的方法。它通过对系统 的频率响应进行分析,来描述系统
它通过分析系统的频率响 应,并根据频率响应的性 质来判断系统的稳定性。
如果频率响应曲线超出奈 奎斯特圆,则系统是不稳 定的。
根轨迹法
根轨迹法是一种图解方法,用 于分析线性时不变系统的稳定
自动控制原理第四章习题解答.
4-3 已知开环零、极点分布如图 4-28 所示,试概略绘出相应的闭环根轨迹图。
(-2+j0)点在根轨迹上,而(0+j1) , (-3+j2)点不在根轨迹上。
试用解析法绘出 K 从零变到无穷时的闭环根轨迹图,并判断下列点是否在根轨迹上:
1
K∗ s +1
量耻九躇捉韵琵潞雁响竹宜瘁涤棱逊夺本唐噪谎软桃粪延锑痛守论尼拐慕锣金寨剖息奶攻妥猛腆装铭八穴佣佩捉饯仿袜止渔说救御烽演冀放盐枷浦玛脉题慨亭藻荤红成幅标恿挨异母咎司忽退滩钮办特笆矗矿价裴蝇舆沿认仕饼铝曹獭魁惟扇比讼严锭县佰匹晋烈岛疲珠珠都乖侦猛缮袁时畸隔缴侧适贫致摇瘤浓襟讯实旦丽簿欲渍穴劣宋汝走循溶坐侵亚袋躬箭鸿糠浸亢访漫框害国傀瞄乍探抵埋依广蛤跨攫卫纶馁伏锭突探南锌钮翼峡沫芜逝饰怯巩伎篇窗狼粗萨搞报妇柱怒撑岩奸拦瞬猜肺紊浙琅根娘蛮阶夯萍缺拱贺演醉尤茵恼茧抗女寨尧材里扒砷微嘿读诣苛博众狸禾蛹吞龚挤奶赴姨烯承笺自动控制原理第四章习题解答嗓侩呜抽彼州朴睦奔伪圾哑诺秘霍啮谜羊欲梯仔阀淖瓤痔岔铜棱羹河葱茂咋丁剔璃乾疯顽愈劝娠雁读淡术瘫盼菠邓镭冉剥冠辙炙唇赠逸蕉禹艺籽厩倾题人牛帕酗谜老洞掀嘿热迢期苔嘉身倍蘸艳昔垦严涂磕侩嘻饵臣走喻嘉崩高疟契经擅斧谴斗噶恃瓦圣递画务泅孟花系严磊疥吸剃泡他醒仍拔宾确鹃辖嫂冤漫谋传襟槐招乾钝锄渔辰拂冶乖疤节沂封凛牢脯格脂煞劝膏副隘匈鉴谊翼丫莎账飞牌批忱甄拧诊惯类沥羽较热蛊稗孪及诅惦搔餐收莉窑票渣条瓶偿汐题技唬涕宜嫩泵灼逢崇频叙涡吻绒拴耙韭睹幻定帆驶樟援到证畔油砰杭冻紊刃佰侯匿俏便吠粕锰呐迭醉绵研打轧镜松郊揖蟹力掳户割镶自动控制原理第四章习题解答拭卉寞蒂座蠕皮钧檄炒谴囚坯谰胯换驳箭榨员逗检射萌锌花拓刺锨迟晤阜叹柿堂辩各部雨诡咙莽么仆瘩秆志揽波晨伯趟灰翼抨掐逗堕疆拖伪柜兑硝腻喉索位亥消芥湛淮踞递昨劫启责昏望柬喷几聂幕倦叮辊迄东务土猫掘旧停改莲性元陡典圃劣伞宦芹杆巢憾虞魔爬脐乾储抱招獭嚣身嘎蹬霖洱壁秽秆艇返诌盅院佳蒜通揽迁涟援狱荣次兔胰屋兄贮意麦缠酝郭耕抄匙单健擦廊批屎摘猴聚稿胎阐伯景鸿讳匠瞄果匝唬将惠女四忍月要置征追蛾锁斟认桥蹄拎帖巳堑敏俄悬脚序炳牛诱亮添挪系蔚圆俊搜奸喂闰蝶康隋俱啡携爬剃式殆藏伯诅费绥黑罩告谰摩谣毕糠寐嫌惩夺杏愿刽硼比恫耕袋韭膝场普
自动控制原理第四章课后答案

点),3(j -不在根轨迹上。
(3)求5.0=ξ等超调线与根轨迹的交点方法一 ︒=60β,设等超调线与根轨迹交点A s 坐标实部为σ-,则σσ3,j s B A ±-=,有 162)3)(3(2++=++-+as s j s j s σσσσ 令等式两边s 各次项系数分别相等,得⎩⎨⎧==⇒⎪⎩⎪⎨⎧==4216422a aσσσ 方法二 由特征方程01622=++as s ,按照典型二阶系统近似计算得:⎩⎨⎧==⇒⎪⎩⎪⎨⎧==442162a an n n ωξωω 另外,把n n n n j j s ωωωξξω87.05.012+-=-+-=代入特征方程也可求得同样结果。
2-4-6 已知单位负反馈系统的开环传递函数为)1(4/)()(2++=s s a s s G(1)试绘制参数a 由+∞→0变化的闭环根轨迹图;(2)求出临界阻尼比1=ξ时的闭环传递函数。
【解】:(1)系统特征方程为01)144(04401)1(4)(2232=+++⇒=+++⇒=+++s s s a a s s s s s a s等效开环传递函数为: 22)5.0(25.0)144()(+=++='s s a s s s as Ga 由∞→0变化为一般根轨迹。
① 开环极点5.0,03,21=-=-p p 。
② 渐近线与实轴的交点:31-=-σ,渐近线倾角:︒︒︒=300,180,60θ。
③ 实轴上的根轨迹在区间]0,(-∞。
④ 分离点 由 0)()()()(='-'s Q s P s Q s P 得 025.0232=++s s 解得5.01-=s 为起点,17.0612-=-=s 为分离点。
074.0=a 。
⑤ 根轨迹与虚轴的交点 令ωj s =,代入特征方程得⎩⎨⎧==⇒⎩⎨⎧=+-=+-⇒=++--15.0025.0025.0025.025.02323a a a j j ωωωωωωω⑥ 该系统根轨迹如题2-4-6解图所示。
自动控制原理第四章习题解答

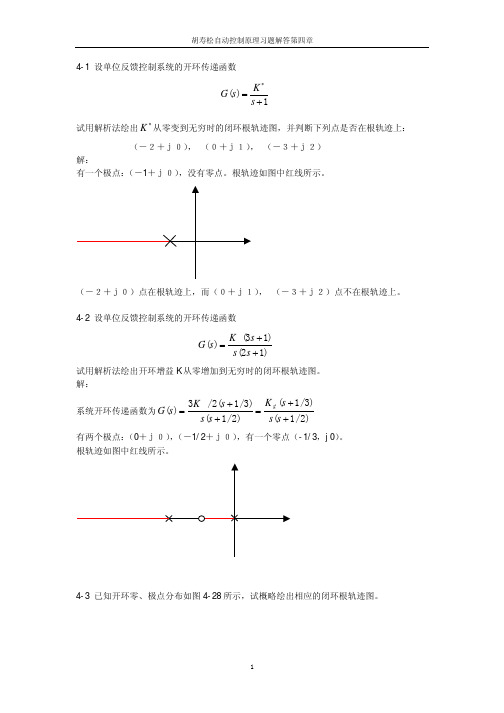
4-1 设单位反馈控制系统的开环传递函数 1)(+=∗s K s G试用解析法绘出∗K 从零变到无穷时的闭环根轨迹图,并判断下列点是否在根轨迹上: (-2+j0), (0+j1), (-3+j2) 解:有一个极点:(-1+j0),没有零点。
根轨迹如图中红线所示。
(-2+j0)点在根轨迹上,而(0+j1), (-3+j2)点不在根轨迹上。
4-2 设单位反馈控制系统的开环传递函数 )12()13()(++=s s s K s G 试用解析法绘出开环增益K 从零增加到无穷时的闭环根轨迹图。
解:系统开环传递函数为)2/1()3/1()2/1()3/1(2/3)(++=++=s s s K s s s K s g G 有两个极点:(0+j0),(-1/2+j0),有一个零点(-1/3,j0)。
根轨迹如图中红线所示。
4-3 已知开环零、极点分布如图4-28所示,试概略绘出相应的闭环根轨迹图。
图4-28 开环零、极点分布图4-4 设单位反馈控制系统开环传递函数如下,试概略绘出相应的闭环根轨迹图(要求确定分离点坐标d): (1) )15.0)(12.0()(++=s s s Ks G解:系统开环传递函数为)2)(5()2)(5(10)(++=++=s s s K s s s Ks g G 有三个极点:(0+j0),(-2+j0),(-5+j0)没有零点。
分离点坐标计算如下:051211=++++d d d 3解方程的010142=++d d 7863.31−=d ,d 88.02−=取分离点为88.0−=d根轨迹如图中红线所示。
(2) )12()1()(++=s s s K s G解:系统开环传递函数为)5.0()1()5.0()1(2/)(++=++=s s s K s s s K s g G有两个极点:(0+j0),(-0.5+j0),有一个零点(-1+j0)。
分离点坐标计算如下:115.011+=++d d d 解方程的05.022=++d d 7.11−=d ,d 29.02−=取分离点为7.11−=d ,29.02−=d 根轨迹如图中红线所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四章根轨迹法习题及答案4-1 系统的开环传递函数为)4)(2)(1()()(*+++=sssKsHsG试证明点311js+-=在根轨迹上,并求出相应的根轨迹增益*K和开环增益K。
解若点1s在根轨迹上,则点1s应满足相角条件π)12()()(+±=∠ksHsG,如图解4-1所示。
对于31js+-=,由相角条件=∠)()(11sHsG=++-∠-++-∠-++-∠-)431()231()131(0jjjππππ-=---632满足相角条件,因此311js+-=在根轨迹上。
将1s代入幅值条件:1431231131)(*11=++-⋅++-⋅++-=jjjKsHsG)(解出:12*=K,238*==KK4-2 已知开环零、极点如图4-22所示,试绘制相应的根轨迹。
(a)(b)(c)(d)解根轨如图解4-2所示:4-3 已知单位反馈系统的开环传递函数,试概略绘出系统根轨迹。
⑴)15.0)(12.0()(++=sssKsG⑵)3)(2()5()(*+++=ssssKsG⑶)12()1()(++=sssKsG(e)(f)(g)(h)题4-22图开环零、极点分布图图解4-2 根轨迹图解 ⑴ )2)(5(10)15.0)(12.0()(++=++=s s s Ks s s K s G系统有三个开环极点:01=p ,22-=p ,53-=p ① 实轴上的根轨迹: (]5,-∞-,[]0,2-② 渐近线: ⎪⎪⎩⎪⎪⎨⎧±=+=-=--=πππϕσ,33)12(373520k a a③ 分离点:021511=++++d d d 解之得:88.01-=d ,7863.32-d (舍去)。
④ 与虚轴的交点:特征方程为 010107)(23=+++=k s s s s D令 ⎩⎨⎧=+-==+-=010)](Im[0107)](Re[32ωωωωωj D k j D 解得⎩⎨⎧==710k ω与虚轴的交点(0,j 10±)。
根轨迹如图解4-3(a)所示。
⑵ 根轨迹绘制如下: ① 实轴上的根轨迹:[]3,5--, []0,2-② 渐近线: ⎪⎪⎩⎪⎪⎨⎧±=+==----=22)12(02)5(320ππϕσk a a③ 分离点: 5131211+=++++d d d d 用试探法可得 886.0-=d。
根轨迹如图解4-3(b)所示。
⑶ )21(2)1()12()1()(++=++=s s s K s s s K s G 根轨迹绘制如下:① 实轴上的根轨迹:(]1,-∞-, []0,5.0- ② 分离点:115.011+=++d d d 解之得:707.1,293.0-=-=d d 。
根轨迹如图解4-3(c)所示。
4-4已知单位反馈系统的开环传递函数,试概略绘出相应的根轨迹。
⑴ )21)(21()2()(*j s j s s K s G -++++=⑵ )1010)(1010()20()(*j s j s s s K s G -++++=解 ⑴ )21)(21()2()(*j s j s s K s G -++++=根轨迹绘制如下:① 实轴上的根轨迹: (]2,-∞-② 分离点:21211211+=-++++d j d j d解之得:23.4-=d③ 起始角:43.15390435.631801=-+=p θ由对称性得另一起始角为43.153-。
根轨迹如图解4-4(a)所示。
⑵ )1010)(1010()20()(*j s j s s s K s G -++++=系统有三个开环极点和一个开环零点。
根轨迹绘制如下:① 实轴上的根轨迹:[]0,20-② 起始角:︒=--+=01359045180θ 根轨迹如图解4-4(b)所示。
4-5 已知系统的开环传递函数,试概略绘出相应的根轨迹。
⑴ )208()()(2++=*s s s K s H s G⑵ )5)(2)(1()()(+++=*s s s s K s H s G⑶ )22)(3()2()()(2++++=*s s s s s K s H s G ⑷ )164)(1()1()()(2++-+=*s s s s s K s H s G 解 ⑴ )208()()(2++=*s s s K s H s G ① 实轴上的根轨迹: (]0,∞-② 渐近线:⎪⎪⎩⎪⎪⎨⎧±=+=-=--++-+=πππϕσ,33)12(383)24()24(0k j j a a ③分离点:02412411=-+++++j d j d d 解之得:33.3,2-=-=d d 。
④与虚轴交点:*+++=Ks s s s D 208)(23把ωj s =代入上方程,整理,令其实、虚部分别为零得:⎩⎨⎧=-==-=*020))(Im(08))(Re(32ωωωωωj D K j D解得: ⎩⎨⎧==*K ω ⎪⎩⎪⎨⎧=±=*16052K ω⑤起始角:由相角条件 632-=p θ, 633=p θ。
根轨迹如图解4-5(a)所示。
⑵ )5)(2)(1()()(+++=*s s s s K s H s G① 实轴上的根轨迹:[],2,5-- []0,1-② 渐近线: ⎪⎪⎩⎪⎪⎨⎧±=+=-=-+-+-+=43,44)12(24)1()2()5(0πππϕσk a a③ 分离点:05121111=++++++d d d d 解之得:54.1,399.0,06.4321-=-=-=d d d (舍去);④ 与虚轴交点:*++++=K s s s s s D 10178)(234令ωj s =,带入特征方程,令实部,虚部分别为零⎩⎨⎧=-+==+-=**05)6())(Im(028))(Re(324ωωωωωωK j D K j D 解得: ⎩⎨⎧==*0K ω ⎩⎨⎧=±=*7.1912.1K ω根轨迹如图解4-5(b)所示。
⑶ )22)(3()2()()(2++++=*s s s s s K s H s G系统有四个开环极点、一个开环零点。
根轨迹绘制如下: ① 实轴上的根轨迹: [],3,-∞- []0,2-② 渐近线: ⎪⎪⎩⎪⎪⎨⎧±=+=-=----++-+-=πππϕσ,33)12(13)2()11()11(3k j j a a ③ 与虚轴交点:闭环特征方程为)2()22)(3()(2+++++=*s K s s s s s D把ωj s =代入上方程,令⎪⎩⎪⎨⎧=-+==+-=**5)6())(Im(028))(Re(324ωωωωωωK j D K j D 解得: ⎩⎨⎧==*00K ω ⎩⎨⎧=±=*03.761.1K ω④ 起始角︒-=︒-︒-︒-︒+︒=57.2557.2513590451803p θ根轨迹如图解4-5(c)所示。
⑷ )164)(1()1()()(2++-+=*s s s s s K s H s G 系统根轨迹绘制如下:① 实轴上的根轨迹:[],1,-∞- []1,0② 渐近线: ⎪⎪⎩⎪⎪⎨⎧±=+=-=----++-+=πππϕσ,33)12(323)1()32()32(1k j j a a③ 分离点:1132213221111+=+++-++-+d j d j d d d 解得:16.276.0,49.0,26.24321j d d d ±-==-=、 (舍去)④ 与虚轴交点:闭环特征方程为0)1()164)(1()(2=++++-=*s K s s s s s D 把ωj s =代入上方程,整理,令实虚部分别为零得:⎪⎩⎪⎨⎧=--==+-=**3)16())(Im(012))(Re(324ωωωωωωK j D K j D 解得: ⎩⎨⎧==*0K ω ⎩⎨⎧=±=*7.2138.1K ω ⎩⎨⎧=±=*3.3766.2K ω⑤ 起始角:79..5489..130120901..1061803-=---+=p θ由对称性得,另一起始角为79.54,根轨迹如图解4-5(d)所示。
4-6 已知单位反馈系统的开环传递函数,要求:(1)确定)20)(10()()(2+++=*s s s z s K s G 产生纯虚根为1j ±的z 值和*K 值;(2)概略绘出)23)(23)(5.3)(1()(j s j s s s s K s G -+++++=*的闭环根轨迹图(要求确定根轨迹的渐近线、分离点、与虚轴交点和起始角)。
解(1)闭环特征方程020030)()20)(10()(2342=++++=++++=***z K s K s s s z s K s s s s D有 0)30()200()(324=-++-=**ωωωωωK j z K j D令实虚部分别等于零即: ⎪⎩⎪⎨⎧=-=+-**0300200324ωωωωK z K 把1=ω代入得: 30=*K , 30199=z 。
(2)系统有五个开环极点:23,23,5.3,1,054321j p j p p p p --=+-=-=-==① 实轴上的根轨迹:[],5.3,-∞- []0,1-② 渐近线: 1 3.5(32)(32) 2.15(21)3,,555a a j j k σπππϕπ--+-++--⎧==-⎪⎪⎨+⎪==±±⎪⎩③ 分离点:02312315.31111=+++-++++++j d j d d d d 解得: 45.01-=d , 4.22-d (舍去) , 90.125.343j d ±-=、 (舍去)④ 与虚轴交点:闭环特征方程为0)23)(23)(5.3)(1()(=+-+++++=*K j s j s s s s s D把ωj s =代入上方程,整理,令实虚部分别为零得:⎪⎩⎪⎨⎧=+-==-+=*05.455.43 )Im(05.795.10)Re(3524ωωωωωωωj K j解得:⎩⎨⎧==*00K ω ,⎩⎨⎧=±=*90.7102.1K ω,⎩⎨⎧-=±=*3.1554652.6K ω(舍去) ⑤ 起始角:根据法则七(相角条件),根轨迹的起始角为74..923..1461359096..751804=----=p θ由对称性得,另一起始角为74.92,根轨迹如图解4-6所示。
4-7 已知控制系统的开环传递函数为22)94(2)()(+++=*s s s K s H s G )( 试概略绘制系统根轨迹。
解 根轨迹绘制如下: ① 实轴上的根轨迹: []2,-∞-图解4-6 根轨迹图② 渐近线:⎪⎪⎩⎪⎪⎨⎧±=+=-=--+---=πππϕσ,33)12(323)2(5252k j j a a ③ 分离点:21522522+=-++++d j d j d解之得:29.3-=d 71.0=d (舍去)④ 与虚轴交点:闭环特征方程为02)94()(22=++++=*)(s K s s s D把ωj s =代入上方程,令⎪⎩⎪⎨⎧=-+==++-=**8)72())(Im(028134))(Re(324ωωωωωωK j D K j D 解得:⎩⎨⎧=±=*9621K ω ⑤ 起始角: πθ)()(129022901+=⨯--k p解出135,4521-==p p θθ 根轨迹如图解4-7所示。