第六章多目标及离散变量优化方法
多目标优化方法
多目标优化方法多目标优化方法指在实际问题中存在多个优化目标时,如何找到一组最优解的问题。
传统的单目标优化方法无法直接应用于多目标问题,因为多目标问题的最优解不止一个,而是一个解集合,称为Pareto最优解集合,其中每个解都是在某种意义上最优的,但在其他目标方面可能并不是最好的。
目前,已经有许多多目标优化方法被提出,并在实际问题中取得了很好的应用效果。
其中,最常用且效果较好的方法主要包括:Pareto排序法、随机权重法、进化算法和支配关系法等。
Pareto排序法是将多目标问题转化为单目标优化问题的一种方法。
首先,对候选解集合进行排序,按照某种准则将解集合划分为不同的非支配层,其中非支配层最高的层即为Pareto最优解集合。
其优点是直观易理解,但不适用于解集合较大的问题。
随机权重法是通过随机生成一系列的权重向量来转化多目标问题为一系列的单目标优化问题,通过求解这些单目标问题,得到多个最优解,从而构成Pareto最优解集合。
该方法的优点是收敛速度快,但需要事先决定权重向量的个数。
进化算法是一种常用的多目标优化方法,常见的有遗传算法、粒子群算法和蚁群算法等。
这些算法通过在解空间中进行搜索和优化,逐渐逼近Pareto最优解集合,并在解集合中寻找最优解。
支配关系法是根据解之间的支配关系来进行优化的一种方法。
对于多目标问题,若解A在所有目标上至少与解B相等且在某个目标上更好,则称解A支配解B。
通过判断解之间的支配关系,可以排除掉不在Pareto最优解集合中的解,从而减少搜索空间。
综上所述,多目标优化方法是在解决实际问题中存在多个优化目标时的一种有效手段。
通过合理选取合适的方法和策略,可以找到问题的多个最优解,并帮助决策者在多个目标之间做出合理的权衡和选择。
第六章 多目标最优化方法
影响,有影响为2,无影响为1。 v 13.外来物资的装卸次数:U13(x) v 方案xi运输外来物资至坝址的装和卸总次
数。
v 以上各指标及方案的值详见表3(运输系统决 策分析技术经济指标表)
v 6.4.4 决策意见
v
U9(x)=U1(x)/Q(x) 效益投资比
v 式中Q(x)为交通运输方案xi担负的总货运量(吨)
v 10.运输系统职工总人数:U10(x) (人) v 方案xi完成运输系统运行管理的职工总人数
(反映管理的难易、繁简)。
v 11.运输工具能源消耗费用:U11(x)(万元)
v 方案xi完成商品材料、砂石料和客运、总 运量消耗的能源费用。
员) v 2. 目标函数 v (1) 总的投资最省; v (2) 工期最短; v (3) 生产均衡,不均系数小,施工高峰强度小; v (4) 工程质量优,良率最高; v (5) 能源及原材料消耗最少;
v (6) 劳力及机械设备用量最少。 v 显然目标间存在矛盾,彼长此短,无一
方案全面最优,只能整体最优。 v 6.1.3 多目标决策的一般数学表达式 v 设有m个约束条件,k个目标函数,
表3 运输系统决策分析技术经济指标表
v 表42 火车轮渡直达两岸(杨家湾设码头) v 加权多指标决策对比优序数矩阵的计算
序数法,排出如表44,从该表44中的aij'排出 加权多目标优序数决策矩阵如表45中Ki'的大 小为序,其决策顺序应为
v
x3 → x4 → x2 → x1
v 铁路 公路 水运 火车轮渡
v 建议对三峡工程施工对外交通运输方案
做决策时,应采用铁路为主,水运与公路为 辅的方案,就铁路工程本身,应采用铁二院 推荐的姜家庙电力机车牵引方案见表46 。
多目标及离散变量优化方法-文档资料
min F ( x) wi fi ( x)
i 1
l
wi——加权因子 (wi≥0,i=1,2,…,l ) 加权因子取值对计算结果的正确性影响较大。
第六章 第二节 多目标优化方法
加权因子wi确定的方法: ①将各分目标转化后加权 为消除各分目标在量级上的差别,先将分目标函数fi(x) 转化为无量纲等量级目标函数 f i ( x) (i 1,2,...,l ) ( f i ( x) 1) 再组成统一目标函数。 l F ( x) wi f i ( x)
第六章
结束
第一节 多目标优化问题
机械设计中,同时要求几项设计指标达到最优的问题 ——多目标优化设计问题
T .. ( x ) [ f ( x ), f ( x ) f ( x )] F 2 l min min 1 n
s.t. g j ( x) 0 ( j 1,2,...,m)
x R
x R n
第二节 一、主要目标法
多目标优化方法
基本思想:多个目标中选择一个目标作为主要目标, 而其它目标则只需满足一定的要求即可,即 将目标转化为约束条件 目标函数转化为:
f k ( x) min (k ) x(D k) D x | f i min f i ( x) f i max (i 1,2,...,k 1, k 1,...l , x D)
式中,f imin和f imax为第i个目标函数的上、下限。 一般 f i ( x) 只有问题,通过一定方法转化为 统一目标函数或综合目标函数作为多目标优 化问题的评价函数。
第六章 第二节 多目标优化方法
常用的方法有:线性加权法、理想点法(目标规划法) 、 功效系数法和极大极小法等。
多目标优化方法
多⽬标优化⽅法多⽬标优化⽅法基本概述⼏个概念优化⽅法⼀、多⽬标优化基本概述现今,多⽬标优化问题应⽤越来越⼴,涉及诸多领域。
在⽇常⽣活和⼯程中,经常要求不只⼀项指标达到最优,往往要求多项指标同时达到最优,⼤量的问题都可以归结为⼀类在某种约束条件下使多个⽬标同时达到最优的多⽬标优化问题。
例如:在机械加⼯时,在进给切削中,为选择合适的切削速度和进给量,提出⽬标:1)机械加⼯成本最低2)⽣产率低3)⼑具寿命最长;同时还要满⾜进给量⼩于加⼯余量、⼑具强度等约束条件。
多⽬标优化的数学模型可以表⽰为:X=[x1,x2,…,x n ]T----------n维向量min F(X)=[f1(X),f2(X),…,f n(X)]T----------向量形式的⽬标函数s.t. g i(X)≤0,(i=1,2,…,m)h j(X)=0,(j=1,2,…,k)--------设计变量应满⾜的约束条件多⽬标优化问题是⼀个⽐较复杂的问题,相⽐于单⽬标优化问题,在多⽬标优化问题中,约束要求是各⾃独⽴的,所以⽆法直接⽐较任意两个解的优劣。
⼆、多⽬标优化中⼏个概念:最优解,劣解,⾮劣解。
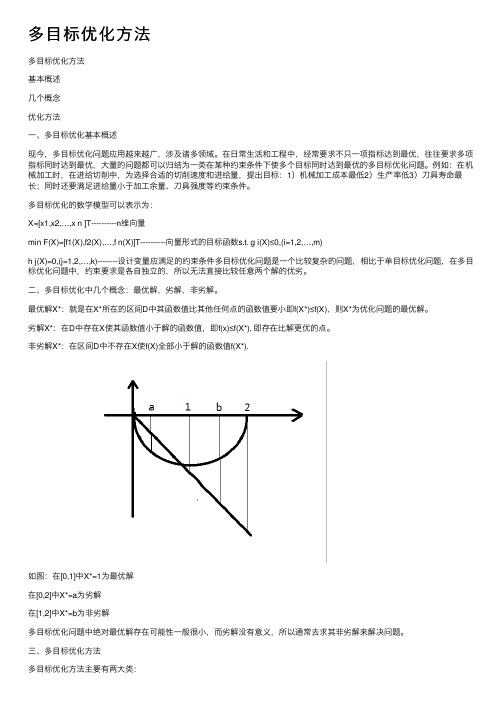
最优解X*:就是在X*所在的区间D中其函数值⽐其他任何点的函数值要⼩即f(X*)≤f(X),则X*为优化问题的最优解。
劣解X*:在D中存在X使其函数值⼩于解的函数值,即f(x)≤f(X*), 即存在⽐解更优的点。
⾮劣解X*:在区间D中不存在X使f(X)全部⼩于解的函数值f(X*).如图:在[0,1]中X*=1为最优解在[0,2]中X*=a为劣解在[1,2]中X*=b为⾮劣解多⽬标优化问题中绝对最优解存在可能性⼀般很⼩,⽽劣解没有意义,所以通常去求其⾮劣解来解决问题。
三、多⽬标优化⽅法多⽬标优化⽅法主要有两⼤类:1)直接法:直接求出⾮劣解,然后再选择较好的解将多⽬标优化问题转化为单⽬标优化问题。
2)间接法如:主要⽬标法、统⼀⽬标法、功效系数法等。
将多⽬标优化问题转化为⼀系列单⽬标优化问题。
06多目标及离散变量优化方法简介
U (x ) =
∑
l
i =1
f i (x ) f i fi
2
分层序列法及宽容分层序列法
分层序列法的基本思想是将多目标优化问 题式中的J个目标函数分清主次,按其重要程度 逐一排除,然后依次对各个目标函数求最优解. 不过后一目标应在前一目标最优解的集合域内寻 优.
现在假设f1(x)最重要,f2 (x)其次,f3 (x)再其次,…. 首先对第一个目标函数f1(x)求解,得最优值
x∈R
s.t . g j ( x ) ≤ 0 ( j = 1, 2, , p ) hk (x ) = 0 ( k = 1,2, , q )
f 2 (x )
f 3 (x )
T f 4 ( x )]
在多目标优化模型中,还有一类模型,其特点 是,在约束条件下,各个目标函数不是同等地被最优 化,而是按不同的优先层次先后地进行优化.例如: 工厂生产:1号产品,2号产品,3号产品,…,M号 产品.应如何安排生产计划,在避免开工不足的条件 下,使工厂获得最大利润,工人加班时间尽量地少. 若决策者希望把所考虑的两个目标函数按其重 要性分成以下两个优先层次:第一优先层次——工厂 获得最大利润.第—优先层次——工人加班时间尽可 能地少.那么,这种先在第一优先层次极大化总利润, 然后在此基础上再在第二优先层次同等地极小化工人 加班时间的问题就是分层多目标优化问题.
主要目标法的思想是抓住主要目标,兼顾其它 要求.求解时从多目标中选择一个目标作为主要目 标,而其它目标只需满足一定要求即可.为此,可 将这些目标转化成约束条件.也就是用约束条件的 形式来保证其他日标不致太差,这样处理后,就成 为单目标优化问题. 设有l个目标函数f1(x),f2(x),…,fl(x),其 中 x ∈ D,求解时可从上述多目标函数中选择一个 f(x)作为主要目标,则问题变为
第六章 多目标最优化方法
对于最小值的目标函数(如前一中所述问 题中的目标函数4和5)可采用乘以-1的办法 化为且最大值的目标函数。
①最优解定义:若x0∈R,对任一个x∈R, 总有F(x)≤F(x0),称此x0为此多目标问题的最优 解。 ②非劣解定义:若x0∈R,且不存在x∈R, 使得F(x) ≥F(x0),则称x0为此目标问题的非劣 解。 由此可见,所谓非劣解是个允许解(可 行解但却找不到另一个可行解,它至少在一 个目标值上大于它,而在其它目标值上欲等 于它,所谓求解多目标问题往往归结为如何 从非劣解中求一个最优解)
…,gm(x)]T (约束条件)
g(x)=[ g1(x), g2(x),
F(x)=[ f1(x), f2(x), …,fk(x)]T
求多目标最优化问题可记为
(目标函数)
V max F ( x)
பைடு நூலகம்
xR
即在满足约束条件的集合R中找出x,使所 有的目标fi(x)达到最大。这里 R={x∣g(x) ≥0}
并把第j个方案xj的劣序数记为
H j aij
iN
jN
(4)根据Ki的 其
大小优选决策次序
Hi Ki m(n 1) i N表明一个方案
的优序数Ki与劣序数Hi成反比,决策方
法是按Ki的大小将所有的方案排序,可 选择一个方案xe使得 K max K
e iN i
6.4.1 其中ui(x)表示第i个指标,它可以是定量的,
也可以是定性的,M={1,2,…,m},
N={1,2,…,n}而且要求m≥2,n≥2,为将指标
转化为比较序数aijl (相当于等效系数),则 令
i j i j 1 若ul ( x ) ul ( x )或ul ( x ) ul ( x ) (1) aijl 0.5 若ul ( xi )=ul ( x j )或ul ( xi ) ul ( x j ) 0 若ul ( xi ) ul ( x j )或ul ( xi ) ul ( x j )
第六章多目标及离散变量优化方法
第六章 多目标优化方法
一、多目标优化问题 二、多目标优化方法
机械优化设计
一、多目标优化问题
1、概念 同时要求实现: 成本、重量、体积 利润、产量、承载能力 兼顾多方面的要求,则称为多目说,若有 l 个目标函数,则多目标优化 问题的表达式可写成:
V min F n X min f1 X n
各分目标函数
机械优化设计
返回目标函数的最优解
返回目标函数的最优值
二、优化函数使用格式
返回算法的终止标志 优化算法信息的一个数据结构
返回目标函数在最优解的梯度
目标函数在最优解的海色矩阵 [x,fval,exitflag,output, grad,hessian]= fgoalattain(@fun,x0,goal,w,A,b,Aeq,beq,Lb,Ub,’Nlc’,options,P1,P2…)
对于两个单目标函数显然很容易分别求的其最优解,但 是却无法求得两者共同的最优解。
机械优化设计
3.多目标优化问题解得可能情况
(1)最优解 (2)劣解 (3)非劣解 (4)弱非劣解或称弱有效解。
0
●
f2
● ●
4
●
6
5
1
●
3
●
2
f1
对于f1(x),1最好,其次为3,2,4,5,6; 对于f2(x),2最好,其次为3,1,5,4,6。
xR xR
f 2 X
f l 1 X
fl X
T
s.t.
g j X 0 j 1, 2 , p
F X min f1 X
hk X 0 k 1, 2 , q
多目标及离散
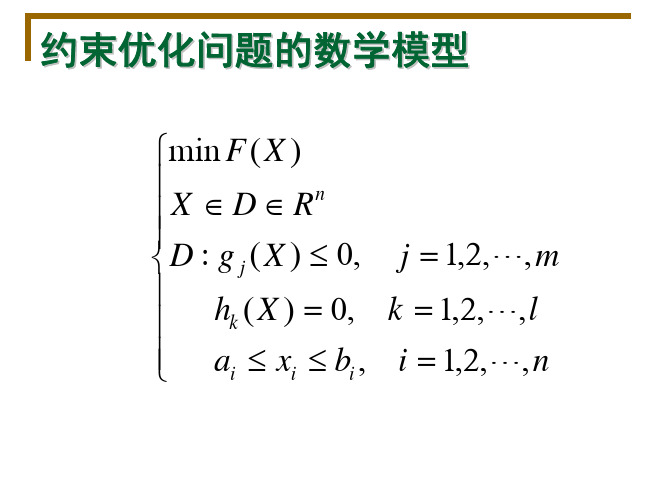
⎧min F ( X ) ⎪ n ⎪X ∈ D ∈ R ⎪ ⎨ D : g j ( X ) ≤ 0, j = 1,2, , m ⎪ hk ( X ) = 0, k = 1,2, , l ⎪ ⎪ ai ≤ xi ≤ bi , i = 1,2, , n ⎩
引例1
对车床齿轮变速箱进行设计,要求:
⎧min F1 ( X ) ⎪ X ∈ D ∈ Rn ⎪ ⎪ D : g j ( X ) ≤ 0, j = 1, 2, , m ⎪ ⎨ ⎪ hk ( X ) = 0, k = 1, 2, , l ⎪ ai ≤ xi ≤ bi , i = 1, 2, , n ⎪ 0 ⎪ g m + j −1 ( X ) = Fj ( X ) − Fj ≤ 0, ⎩
多目标优化方法
2. 统一目标法
② 功效系数法
引例4
设计齿轮时,要求:
齿轮的齿数——正整数 齿轮的模数——按标准系列选用
离散优化方法
1. 网格法
遍数法
离散优化方法
2. 离散复合形法
离散变量的优化方法(P222)
离散变量的优化方法(P222)
非劣解(P189)
也称有效解。
⎧V − min f ( X ) = min [ f1 ( X ) ⎪ ⎪ f1 ( X ) = x 2 − 2 x ⎨ ⎪ f2 ( X ) = − x ⎪ ⎩0 ≤ x ≤ 2
f 2 ( X )]
T
多目标优化方法
1. 主要目标法(P190)
根据总体技术条件,选定一个作为主要目标函数, 其余分目标函数分别给一个限制后,使其转化为新 的约束条件,即
T
多目标与单目标优化问题求解的区别
对于单目标优化问题,任何两个解都可以用其目标 函数值比较方案优劣。 对于多目标优化问题,任何两个解不一定都可以评 判出优劣:
多目标优化与离散变量优化
(k )
2 ( k ) [min(49 x12 x2 , 0)]2 [min( x1 , 0)]2 [min( x2 , 0)]2 (k )
) 4 x1 x 12
2 2
4q1 (1 q1 )
k
离散变量优化问题程序
2 min f ( X ) 4 x1 x2 12
) 4 x1 x 12
2 2
4q1 (1 q1 )
k
( X , +
(k )
2 ( k ) [min(49 x12 x2 , 0)]2 [min( x1 , 0)]2 [min( x2 , 0)]2 (k )
) 4 x1 x 12
S.t.
2 g1 ( X ) 49 x12 x2 0
g 2 ( X ) x1 0 g3 ( X ) x2 0 x1 2, 4, 6
x1是离散变量,构造外点形式的罚函数
( X , +
(k )
2 ( k ) [min(49 x12 x2 , 0)]2 [min( x1 , 0)]2 [min( x2 , 0)]2 (k )
p为离散变量的个数,n-p为连续变量的个数。 构造罚函数
p k 1 (k) (k) (X ,r ,s k , k ) f (X ) r sk 4q j (1 q j ) g ( X ) u=1 u j=1 m
p k 1 (X , k ,s k , k ) f (X ) k sk 4q j (1 q j ) g ( X ) u=1 u j=1 m
§7-1 多目标优化概述
1、问题的提出
多目标优化方法
多目标优化方法多目标优化是指在多个冲突的目标之间寻求最佳平衡的过程。
在实际问题中,往往存在多个目标之间相互制约和矛盾,因此需要采用多目标优化方法来找到最优解。
本文将介绍几种常见的多目标优化方法,并分析它们的优缺点。
首先,传统的多目标优化方法之一是加权和方法。
该方法将多个目标线性组合为一个综合目标,通过赋予不同的权重来平衡各个目标之间的重要性。
然后,将这个综合目标作为优化目标进行求解。
加权和方法简单直观,易于实现,但在实际问题中往往存在权重选择困难的问题,且无法充分考虑到各个目标之间的相互影响。
其次, Pareto 最优解方法是另一种常见的多目标优化方法。
该方法通过寻找 Pareto 最优解集来解决多目标优化问题。
Pareto最优解集是指在多个目标下无法再改善的解集,即不存在其他解能在所有目标上都优于它们。
Pareto 最优解方法能够充分考虑到各个目标之间的权衡关系,但在实际求解过程中,由于 Pareto 最优解集通常是非凸的,因此求解较为困难。
另外,演化算法也被广泛应用于多目标优化问题的求解。
演化算法是一类基于生物进化原理的启发式优化算法,如遗传算法、粒子群算法等。
这些算法通过种群的进化和迭代来搜索多目标优化问题的 Pareto 最优解集。
演化算法能够有效克服传统优化方法中的局部最优解问题,但在求解复杂多目标优化问题时,算法的收敛速度和搜索能力仍然是一个挑战。
除了上述方法外,近年来,深度学习在多目标优化问题中也展现出了强大的潜力。
深度学习模型能够学习复杂的目标函数映射关系,并通过端到端的训练来求解多目标优化问题。
然而,深度学习模型的训练和调参过程相对复杂,且对数据量和计算资源要求较高。
综上所述,多目标优化方法各有优劣,选择合适的方法取决于具体的问题特点和求解需求。
在实际应用中,可以根据问题的复杂程度和求解精度的要求来灵活选择不同的方法,并结合问题的特点进行调整和改进。
希望本文介绍的多目标优化方法能够为相关领域的研究和实践提供一定的参考和帮助。
多目标最优化方法
多目标最优化方法多目标最优化方法是一种用于解决具有多个目标函数的优化问题的方法。
在传统的单目标优化中,目标函数只有一个,需要寻找一个解使得该目标函数最小化或最大化。
而在多目标优化中,有多个目标函数需要最小化或最大化,这些目标函数通常是相互冲突的,即改变一个目标函数的值会影响其他目标函数的值。
多目标最优化方法的目标是通过找到一组解,使得这组解在多个目标函数上都具有较好的性能。
因此,在多目标最优化中,我们不能再使用单一的度量来衡量一个解的优劣,而是需要使用一种综合度量来评估一个解相对于其他解的优劣。
在多目标最优化方法中,最常用的方法之一是帕累托前沿(Pareto Frontier)方法。
帕累托前沿是一条曲线,该曲线上的每个点都表示在多个目标函数上都达到最优的解,这些解被称为非支配解(Non-dominated Solutions)。
在帕累托前沿上,没有任何一个解可以在所有的目标函数上都比其他解更好。
求解多目标最优化问题的常用方法之一是使用进化算法。
进化算法是一类通过模拟自然进化过程来求解问题的优化算法。
其中最常用的进化算法是遗传算法。
遗传算法通过模拟自然界中基因的交叉、变异和选择过程,逐步改进当前的解,并且通过适应度函数来评估一个解的优劣。
除了遗传算法之外,粒子群优化算法(Particle Swarm Optimization, PSO)、模拟退火算法(Simulated Annealing, SA)和蚁群算法(Ant Colony Optimization, ACO)等进化算法也可以应用于解决多目标最优化问题。
进化算法的基本思想是通过维护一组解的种群,并通过模拟自然进化过程来不断改进种群中的解。
具体来说,进化算法包括以下几个步骤:1.初始化种群:随机生成一组解作为初始种群。
2.选择操作:根据适应度函数,选择一部分解作为父代,用于产生下一代的解。
3.变异操作:对选中的解进行变异操作,引入一定的随机性,以增加种群的多样性。
多目标优化的方法
多目标优化的方法多目标优化是指在优化问题中存在多个相互独立的目标函数,而不是单一的目标函数。
由于不同的目标函数往往是相互冲突的,使得同时最小化或最大化多个目标函数是一个具有挑战性的问题。
在多目标优化中,我们追求的是找到一组解,这组解对于每个目标函数来说都是最优的,而这个解称为Pareto最优解。
在多目标优化中,使用传统的单目标优化方法是不适用的,因为它只能找到单个最优解。
因此,为了解决多目标优化问题,研究人员提出了许多有效的方法。
下面将介绍几种常见的多目标优化方法。
1. 加权求和法(Weighted Sum Method)加权求和法是最简单直观的一种方法。
它把多目标优化问题转化为单目标优化问题,通过给每个目标函数赋予不同的权重,将多个目标函数线性组合成一个单目标函数。
然后使用传统的单目标优化方法求解得到最优解。
这种方法的缺点是需要人工赋权,不同的权重分配可能得到不同的结果,且不能找到Pareto最优解。
2. 约束法(Constraint Method)约束法是通过约束目标函数的方式来解决多目标优化问题。
它将目标函数之间的关系转化为约束条件,并追求找到满足所有约束条件的最优解。
这种方法需要事先给出目标函数之间的约束条件,且难以找到满足所有约束条件的最优解。
3. 基于Evolutionary Algorithm的方法最常用的多目标优化方法是基于Evolutionary Algorithm(进化算法)的方法,如遗传算法(Genetic Algorithm, GA)和粒子群算法(Particle Swarm Optimization, PSO)。
这些算法通过模拟生物进化过程,使用种群的思想来搜索最优解。
它们通过不断演化改进解的质量,迭代地更新解的位置以逼近Pareto 最优解。
这些方法优势明显,能够找到Pareto最优解,但计算复杂度较高。
4. 多目标优化算法的性能评估方法为了评估多目标优化算法的性能,研究人员提出了一些评价指标。
第6章 多目标优化
第六章:多目标优化6.1:概述1986年,法国经济学家V .Pareto ,政治经济学问题 1944年,Von.Neumann 和Morgenstern ,对策论1951年,T.C.Koopmans ,生产和分配活动中的多目标优化问题,引入了“优”的概念 1951年,Kuhn 和Tucker ,数学规划的角度进行了理论概括 1963年,L.A.Zadeh ,从控制论方面提出了多指标问题的概念 1972年,第一次国际性会议讨论多目标优化问题● 多目标优化问题的主要内容问题:用多个指标来衡量各个可能方案的好坏,从中选出“优”者,提供“决策人”采用。
选择方式:由有关的实施部门提出有限个有明确指标的方案。
通过一系列的限制条件,由设计者寻找而得到的有限个或无限个可能方案。
寻优情况:劣解:凡是被别的方案淘汰的方案。
最优解:可以淘汰其他所有方案的这样一个或多个方案。
非劣解(有效解):凡不能被淘汰的方案。
“分析者” 选好解:设计者最终采用的非劣解,非劣解中的一个。
“决策者”寻优方法:采用单目标优化方法,关键是如何将多目标优化问题转化为单目标优化问题。
分目标最优法:约束法、分层序列法评价函数法:将约束区域映照到多目标空间,得到“像集”F (R ),并重新构造一个新的目标函数称为“评价函数”h (F (X )),求h (F (X ))在F (R )上的最优解,从而得到多目标的“优”解。
● 多目标优化问题的数学表达1:单目标优化问题的数学表达⎩⎨⎧=≥m i X g X f Min P i,,2,1,0)()()( },,2,1,0)(|{)(),,,(21m i X g X R X f Min E x x x X i nT n =≥=∈= 2:多目标优化问题的数学表达⎩⎨⎧=≥-mi X g X F Min V VP i ,,2,1,0)()()( mi p T p nT n E m i X g X R p E X f X f X f X F E x x x X ∈=≥=≥∈=∈=},,2,1,0)(|{0)](,),(),([)(),,,(2121 3:目标函数规范化变量规范化:],[i i tri B A x ∈ ii it r i i A B A x x --=n i ,,2,1 =目标函数规范化:)(X f j)()()()(X f Min X f f X f X f j RX j jj j ∈==● 举例1:喜糖问题 甲级: 单价10元/斤 乙级:单价5元/斤 要求:总钱数不超过200元,甲级糖不少于5斤,糖的总量不少于20斤 确定:最好的买糖方案 变量:甲级糖斤数1x ,乙级糖斤数2x221),(E x x X T ∈=目标函数:最省钱211510)(x x X f += 最小221)](),([)(E X f X f X F T ∈=最多糖212)(x x X f +=最大约束条件:总钱数0)510(200)(211≥+-=x x X g 总糖量020)(212≥-+=x x X g 甲级糖05)(13≥-=x X g乙级糖0)(24≥=x X g多目标优化问题:⎩⎨⎧=≥-4,3,2,1,0)()()(i X g X F Min V VP i2:投资问题:资金:a 亿元 项目:m 个,每个花费i a 亿元,收益i c 亿元确定:最佳方案变量:⎩⎨⎧==不投资投资01),,,(21i Tm x x x x X 目标函数:最省钱∑==mi ii xa X f 11)( 最小收益最多∑==mi ii xc X f 12)( 最大约束条件:总资金a xa mi ii ≥∑=10)(11≥-=∑=mi i i x a a X g保证i x 为0或者10)1(=-i i x x)1(0)1(≥--≥-i i i i x x x x6.2:多目标优化问题的解与像集向量不等式TE f f fF ∈=],,,[1111p T p E f f f F ∈=],,,[222212""<21F F <表示p i f f i i ,,2,121 =< ""∠ 21F F ∠表示p i f f i i ,,2,121 =≤""≤21F F ≤表示p i f f i i ,,2,121 =≤ 至少存在某p i i ≤≤001,有2100i i f f <212121FF F F F F ≠∠⇔≤多目标问题的解绝对最优解,绝对最优解集合*a R对于每个目标函数都是最优解},,2,10)(|{m i X g X R X i =≥=∈对于R X ∈,任意j ,都有p j X f X f j j ,,2,1)()( =≥称X 为多目标规划问题的绝对最优解。
多目标及离散变量优化方法
03 离散变量优化方法
离散变量定义与特点
离散变量定义
离散变量是指在决策或优化问题中取 值只能为整数的变量。它们通常用于 描述某些离散的、不连续的现象或事 物。
离散变量的特点
离散变量通常具有有限或可数的取值 范围,并且其取值是整数。此外,离 散变量在优化问题中通常对应于某些 约束条件或决策规则。
离散变量优化方法分类
因此,需要进一步研究和发展更有效的多目标及离散变量 优化方法,以解决实际应用中的复杂问题。
02 多目标优化问题概述
多目标优化定义
多目标优化问题是指在满足多个目标函数最优化的过程中,需要同时考虑多个相 互冲突的目标,并寻求一个最优解集合,使得这些目标在某种意义下达到最优或 相对最优。
多目标优化问题通常涉及到多个相互矛盾的目标,如成本、时间、质量等,需要 在这些目标之间进行权衡和折中,以获得一个满意的解。
精确解法
精确解法是指能够求出优化问题的精确解的方法。对于离 散变量优化问题,精确解法通常包括穷举法、回溯法等。
近似解法
近似解法是指通过一定的近似手段来求解离散变量优化问 题的方法。常见的近似解法包括遗传算法、模拟退火算法、 蚁群算法等。
启发式解法
启发式解法是指基于经验或直观的求解方法,通常用于求 解大规模或复杂的离散变量优化问题。常见的启发式解法 包括贪心算法、元启发式算法等。
离散变量优化方法应用场景
组合优化问题
离散变量优化方法广泛应用于组合优化问题 ,如旅行商问题、排班问题、装箱问题等。
调度与分配问题
在生产、物流和供应链等领域,离散变量优化方法 常用于解决调度与分配问题,如任务调度、车辆路 径规划等。
人工智能与机器学习
离散变量优化方法在人工智能和机器学习领 域也有广泛应用,如神经网络的训练、特征 选择等。
多目标优化方法

多目标优化方法多目标优化方法是指在解决多个相互竞争的目标之间找到最佳平衡点的过程。
在实际应用中,我们往往会面临多个目标之间的矛盾与冲突,因此需要通过合理的优化方法来寻找最优解。
在本文中,我们将介绍几种常见的多目标优化方法,并分析它们的特点和适用场景。
首先,我们来介绍一种常见的多目标优化方法——加权和法。
加权和法是指将多个目标线性组合成一个综合指标,通过调整各个目标的权重来实现多目标优化。
这种方法简单直观,易于实现,但需要事先确定各个目标的权重,而且对于非线性的多目标优化问题效果不佳。
除了加权和法,我们还可以使用多目标遗传算法来解决多目标优化问题。
多目标遗传算法是一种基于自然选择和遗传机制的优化方法,通过种群的进化过程来搜索最优解。
相比于加权和法,多目标遗传算法可以有效地处理非线性、非凸的多目标优化问题,具有较强的全局搜索能力。
此外,还有一种常用的多目标优化方法是多目标粒子群算法。
多目标粒子群算法是一种基于群体智能的优化方法,通过模拟鸟群的行为来搜索最优解。
与多目标遗传算法类似,多目标粒子群算法也具有较强的全局搜索能力,适用于复杂的多目标优化问题。
除了上述几种方法,还有许多其他的多目标优化方法,如多目标模拟退火算法、多目标蚁群算法等。
这些方法各有特点,适用于不同的多目标优化场景。
在实际应用中,我们需要根据具体的问题特点和求解需求来选择合适的多目标优化方法。
总的来说,多目标优化方法在实际应用中具有重要意义,可以帮助我们找到最优的解决方案。
通过合理选择和使用多目标优化方法,我们可以有效地解决多个目标之间的矛盾与冲突,实现最大化的综合效益。
希望本文介绍的多目标优化方法能够为相关领域的研究和应用提供一定的参考和帮助。
多目标优化方法概论
多目标优化方法概论多目标优化(multi-objective optimization)是指在优化问题中存在多个冲突的目标函数的情况下,如何找到一组最优解,使得这些解在各个目标上都具有最佳性能水平。
多目标优化方法是解决这类问题的重要工具,包括传统的数学规划方法和现代的演化算法方法。
一、传统的多目标优化方法主要包括以下几种:1.加权逼近法:加权逼近法是通过为各个目标函数赋予不同的权重,将多目标优化问题转化为单目标优化问题。
根据不同权重的选择,得到一系列最优解,形成一个近似的最优解集。
2.充分删减法:充分删减法是通过将多目标优化问题不断简化为仅考虑一个目标函数的优化问题来求解的。
通过逐渐删减剩余的目标函数,得到一系列最优解,再从中选择一个最优解集。
3.非支配排序法:非支配排序法是针对多目标优化问题的一个常用方法。
该方法通过将解空间中的各个解点进行非支配排序,得到一系列非支配解集。
根据不同的权重选择和参数设定,可以得到不同的非支配解集。
二、现代的多目标优化方法主要包括以下几种:1.遗传算法:遗传算法是一种通过模拟生物进化过程进行优化的方法。
它通过定义适应度函数、选择、交叉和变异等操作,对个体进行进化,逐渐寻找全局最优解。
对于多目标优化问题,遗传算法可以通过引入非支配排序和拥挤度距离等机制,实现对多个目标函数的优化。
2.粒子群优化算法:粒子群优化算法是一种通过模拟鸟群或鱼群的集体行为进行优化的方法。
每个粒子代表一个潜在的解,根据个体最优和全局最优的信息进行,逐渐收敛于最优解。
对于多目标优化问题,粒子群优化算法可以通过引入非支配排序和拥挤度距离等机制,实现对多个目标函数的优化。
3.免疫算法:免疫算法是一种模拟免疫系统的工作原理进行优化的方法。
通过定义抗体和抗原的概念,并引入免疫选择、克隆、突变和杂交等操作,对解空间进行和优化。
对于多目标优化问题,免疫算法可以通过引入非支配排序和免疫选择等机制,实现对多个目标函数的优化。
多目标最优化问题常用求解方法
多目标最优化问题常用求解方法在这个快节奏的时代,我们每个人都像个多面手,试图在工作、生活、家庭和个人兴趣之间找到一个平衡点。
你有没有想过,科学界也面临着类似的挑战?没错,今天我们要聊的就是“多目标最优化问题”,这听起来像个高深的数学问题,但其实和我们日常生活息息相关。
说白了,就是如何在多个目标中找到最佳方案,简直就像你在选择晚餐时,想吃披萨、汉堡又不想胖,这可咋办?1. 什么是多目标最优化?多目标最优化,顾名思义,就是在一个问题中,有多个需要优化的目标。
就好比你想在考试中既考得高分,又希望能留点时间玩游戏。
很显然,两个目标是有点冲突的。
在数学中,这就需要我们找到一个折中的方案,尽可能让两个目标都满意。
这个过程听起来简单,但实际上可没那么容易,尤其是在目标彼此矛盾时。
1.1 多目标的复杂性想象一下,如果你是个商家,想要最大化利润的同时,又想减少生产成本。
这就像在沙滩上走路,两只脚却在不同的方向移动,走起来可真费劲!所以,优化的过程中,我们常常会遇到“帕累托前沿”这个概念,听起来高大上,其实就是找一个折衷的方案,让各个目标都尽量满意。
1.2 常见的求解方法说到求解方法,我们可就要聊聊那些“招数”了。
首先是“权重法”,这就像做菜时加盐,你需要决定到底放多少,才能让整道菜刚刚好。
把各个目标赋予不同的权重,然后统一成一个目标进行优化,简单有效。
但问题是,权重的设置就像量体裁衣,得小心翼翼,稍不留神就可能“翻车”。
2. 经典算法那么,还有哪些经典的算法可以解决这些麻烦呢?来,接着往下看。
2.1 进化算法进化算法就像自然选择,你总是能看到那些更强壮的个体存活下来。
这种方法通过模拟自然选择的过程,逐步逼近最优解。
听起来很神奇吧?而且这一方法还挺受欢迎,特别是在复杂的多目标问题中,它能在短时间内找到不错的解,真是个“快枪手”!2.2 粒子群优化再说说粒子群优化,这就像一群小鸟在空中飞舞,每只鸟都有自己的目标,同时也受到其他鸟的影响。
多目标优化的求解方法
多目标优化的求解方法
多目标优化是指求解最优解时优化目标不止一个,而是多个,每个优化目标都有其不同的满意度。
传统的优化方法都是针对单个目标函数求解最优解,但显然,多目标优化技术在很多工程应用中都比较重要。
多目标优化方法的一般步骤如下:
首先,定义多个优化目标函数。
对于优化目标,应根据实际情况确定优化目标的具体指标,并给出期望的值或范围。
其次,根据定义的优化目标,构建优化模型,并确定目标函数和约束条件。
模型的类型可以是非线性的、线性的或者结构化的。
紧接着,定义多目标优化的解空间,这是基本的决策变量及其取值范围的集合。
之后,选择合适的多目标优化算法,在尽可能短的时间内找到合适的优化解出来,这些优化解可保证满足多个目标的满意度。
最后,对优化出来的解进行分析,如:可视化分析、聚类分析、参数分组分析及意向评价分析等,最后从中选择出最优解。
常用的多目标优化算法有:多目标遗传算法(MOGA)、多目标蚁群优化算法(MOACO)、多目标粒子群优化算法(MOPSO)、多目标模拟退火算法(MMAS)等。
多目标遗传算法是根据遗传算法(GA)的思想改进而成的,它是多目标优化最常用的算法之一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
标量变量 分目标函数的权重 各分目标函数的目标值 min v s.t. fi(X)-wiv ≤goali i=1,2,…,t AX≤b (线性不等式约束) AeqX=beq (线性等式约束) C(X)≤0 (非线性不等式约束条件) Ceq(X)=0 (非线性等式约束) Lb ≤X ≤Ub (边界约束条件)
中心距:
P0=(0.02424dd1-1.112879)(kW)
min f 2 ( X) a a1 a a 2 KL=0.20639Ld0.211806 1.1 K AP 拟合幂函数方程 带的根数: min f 3 ( X ) z ( P0 P0 )K K L
带的根数: min f 3 ( X) z
80~100mm 320~400mm 1~4
T
③约束条件:
(2)确定分目标和它们的权重
按容限值确定权重 ,以使目标函数值 在数量级上统一
K AP ( P0 P0 )K K L
w1 w w 2 w 3
T
机械优化设计
一、多目标优化问题
1、概念 同时要求实现: 成本、重量、体积 利润、产量、承载能力 兼顾多方面的要求,则称为多目标优化问题。
机械优化设计
一般地说,若有 l 个目标函数,则多目标优化 问题的表达式可写成:
V min F n X min f X n 1
xR xR
[x,fval,exitflag,output, grad,hessian]= fgoalattain(@fun,x0,goal,w,A,b,Aeq,beq,Lb,Ub,’Nlc’,options,P1,P2 …)
机械优化设计
(3)编制优化设计的M文件
%V带传动多目标优化设计的调用命令 P=4;i=3;n1=1440;KA=1.1; %已知条件:功率,传动比,转速,工况系数 x0=[100;1250]; %初始点(小带轮直径,V带基准长度) goal=[75,280,2]; %分目标 w=[10^(-2),40^(-2),1.5^(-2)]; %分目标加权系数 lb=[80,630]; %最小带轮直径和A型V带的基准长度 ub=[100;4000]; %最大带轮直径和A型V带基准长度 [xopt,fopt]=fgoalattain(@VDCD_3mb_MB,x0,goal,w,[],[],[],[],lb,ub,@VDC D_3mb_YS)
★协调曲线法
机械优化设计
1.主要目标法
抓住主要目标,兼顾其他要求。(选择一个目标作为主 要目标,将其他目标转化成约束条件)
2.统一目标法
又称为综合目标法,它是将原多目标优化问题,通过 一定方法转化为统一目标函数或综合目标函数作为该多目 标优化问题的评价函数,然后用前述的单目标函数优化方 法求解。
(1)线性加权和法(线性组合法) (2)极大极小法
f 2 X
f l 1 X
fl X
T
s.t.
g j X 0 j 1, 2 , p
F X min f1 X
hk X 0 k 1, 2 , q
f 2 X
f l 1 X
w 1, w 0(i 1, 2, , l )
i 1 i i
i
用 f i X 与wi (i 1, 2, , l ) 的线性组合构成一个评价函数
F X wi f i X min
i 1
i
将多目标优化问题转化为单目标优化问题,即求评价函数
机械优化设计
(3)编制优化设计的M文件
%V带传动多目标优化设计的目标函数文件 function f=VDCD_3mb_MB(x) P=4;i=3;KA=1.1; %已知条件:功率,传动比,工况系数 f(1)=x(1); %f1-小带轮基准直径:目标函数1 a1=x(2)/4-pi*x(1)*(i+1)/8; a2=x(1)^2*(i-1)^2/8; a=a1+sqrt(a1^2-a2); f(2)=a; %f2,中心距:目标函数2 P0=0.02424*x(1)-1.1128789; %单根带额定功率 DP0=0.17; %功率增量 alpha=180-180*x(1)*(i-1)/pi/a; %小带轮包角 Kalp=alpha/(0.549636*alpha+80.396114); %包角系数 KL=0.20639*x(2)^0.211806; %长度系数 f(3)=KA*P/(P0+DP0)/Kalp/KL; %f3-V带根数:目标函数3
解:(1)建立优化设计的数学模型 ①设计变量: V带传动的独立设计变量是小带轮直径dd1和带的基准长度Ld L d (i 1) X=[dd1,Ld]T=[x1,x2]T a1 d d1 4 8 ②目标函数: 2 2 d d 1 ( i 1) a2 小带轮直径: minf1(X)=dd1=x1
(3)理想点法与平方和加权法
(4)分目标乘除法 (5)功效系数法——几何平均法
机械优化设计
(1)线性加权和法(线性组合法)
根据多目标优化问题各个目标函数 f X
1
f 2 X
f l 1 X
fl X ຫໍສະໝຸດ 的重要程度,对应的选择一组权系数 w1 , w2 , , wl ,并有
X D
1)可反映各个单目标对整个多目标问题的重要程度; 2)对各个分目标函数作统一量纲处理。
机械优化设计
多目标优化问题的MATLAB函数有
需知各分目标的单个的最优值
fgoalattain
需确定各分目标的加权系数
fminimax
目标函数的最大值逐次减小
机械优化设计
6.1 函数fgoalattain
带传动的中心距要求 小带轮基准直径的下限和上限
g 7 ( X) 630 x 2 0 g 8 ( X) x 2 4000 0
边 界 约 束 带基准长度的下限和上限
机械优化设计
解:(1)建立优化设计的数学模型 ①设计变量: X=[dd1,Ld]T=[x1,x2]T ②目标函数: 小带轮直径: minf1(X)=dd1=x1 2 中心距: min f 2 ( X) a a1 a1 a2
目标函数文件名 初始点 附加参数 设置优化选项参数
各分目标期望值
各分目标权重
无定义时以空矩阵 符号“[ ]”代替
非线性约束条件的函数名 设计变量的下界和上界 线性等式约束的常数向量 线性等式约束的系数矩阵
线性不等式约束的常数向量
线性不等式约束的系数矩阵
机械优化设计
三、例题
设计带式输送机传动装置上的普通V带传动。已知电机额定功率P=4kW,转 速n1=1440r/min,传动比i=3,采用A型V带,每天工作不超过10小时。要求 传动结构紧凑(带的根数尽量少,带轮直径和中心距尽量小)。
100 80 2 2 2 10 2 400 320 40 2 2 1.5 2 2 41 2
i min F X min wi f i X 的最优解, X D X D i 1 它就是原多目标优化问题的解。
机械优化设计
难点:如何找到合理的权系数 解决方法:将各单目标最优化值的倒数取作权系数
1 wi (i 1, 2, , l ) fi fi min f i X (i 1, 2, , l )
性能约 束
最大带速<25m/s
2x1 dd1(i 1) g 3 ( X) min 1 min 180 1 120 180 1 0 小带轮包角>120°
g 4 ( X) 0.7d d1 (i 1) a 2.8x1 a 0 g 5 ( X) 80 x1 0 g 6 ( X) x1 100 0
[x,fval,exitflag,output, grad,hessian]= fgoalattain(@fun,x0,goal,w,A,b,Aeq,beq,Lb,Ub,’Nlc’,options,P1,P2… )
机械优化设计
(3)编制优化设计的M文件
%V带传动多目标优化设计的约束函数文件 function[g,ceq]=VDCD_3mb_YS(x) i=3;n1=1440; %已知条件:传动比,转速 g(1)=100-x(1); %小带轮直径>=Ddmin g(2)=pi*x(1)*n1/6e4-25 %带速范围V<=Vmax a1=x(2)/4-pi*x(1)*(i+1)/8; a2=x(1)^2*(i-1)^2/8; a=a1+sqrt(a1^2-a2); g(3)=120-180*(1-x(1)*(i-1)/a/pi); %小带轮包角>=alpmin g(4)=0.7*x(1)*(i+1)-a; %中心距范围a>=amin ceq=[];
fl X
T
称为向量目标函数。V min 表示向量极小化, 即向量目标函数中各个目标函数被同等的极小化的 意思。
机械优化设计
在多目标的优化模型中,还有一类模型是在约束条件 下,各个目标函数不是同等的被最优化,而是按不同的优 先层次先后地进行优化----分层多目标优化问题。
2.多目标优化问题的特点
[x,fval,exitflag,output, grad,hessian]= fgoalattain(@fun,x0,goal,w,A,b,Aeq,beq,Lb,Ub,’Nlc’,options,P1,P2… [ [ [ ], [ ], ) ], ],
2 1