空间监视雷达工作模式研究
基于无源侦察幅度的相控阵雷达工作模式仿真
电子技术与软件工程Electronic Technology & Software Engineering电子技术Electronic Technology基于无源侦察幅度的相控阵雷达工作模式仿真蔺诚毅徐伟(西安电子工程研究所陕西省西安市710100)摘要:本文通过对相控阵雷达典型工作模式及天线扫描方式的分析,构建了一套运动场景下机载电子侦察设备对单部相控阵雷达信 号幅度的截获模型,并通过仿真得出不同工作模式下的相控阵雷达截获幅度变化规律,为雷达工作模式识别提供了一种新思路。
关键词:无源侦察;相控阵雷达;工作模式;幅度分析1引言电子战在现代信息化战争中扮演着极其主要的角色,已经成为了决定战争胜败的关键因素。
电子侦察作为电子战的重要组成部分,对战场电磁态势感知、信息融合、作战部署起着重要作用。
一方面随着赋予雷达观测任务的不断增加,另一方面也随着电子技术的不断发展,传统的的机扫雷达己经在功能和性能上很难满足当代战争需求,而相控阵雷达以其天线波束快速扫描、波形快速截变、空间功率合成、多波束形成灵活以及多目标处理等优势,在现代战争中得到了广泛应用,在未来战场的应用前景也十分广阔。
根据不同的工作任务,相控阵雷达具有不同的工作模式。
各种工作模式在时域和空域上具有不同的天线扫描方式,对侦测目标而言,其威胁等级也不同。
为了在提高在战场上的生存能力以及电磁态势感知的能力,对相控阵雷达的工作模式识别己成为电子侦察领域的亟待解决的热点问题。
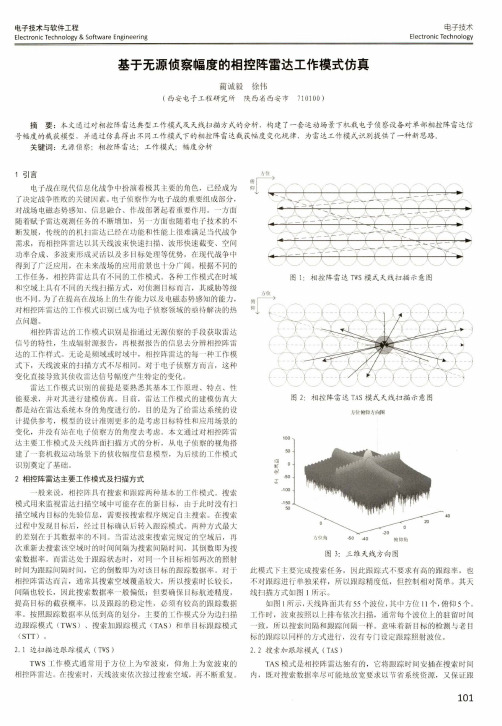
相控阵雷达的工作模式识别是指通过无源侦察的手段获取雷达信号的特性,生成辐射源报告,再根据报告的信息去分辨相控阵雷达的工作样式。
无论是频域或时域中,相控阵雷达的每一种工作模式下,天线波束的扫描方式不尽相同。
对于电子侦察方而言,这种变化直接导致其侦收雷达信号幅度产生特定的变化。
雷达工作模式识别的前提是要熟悉其基本工作原理、特点、性能要求,并对其进行建模仿真。
目前,雷达工作模式的建模仿真大都是站在雷达系统本身的角度进行的,目的是为了给雷达系统的设 计提供参考,模型的设计准则更多的是考虑目标特性和应用场景的 变化,并没有站在电子侦察方的角度去考虑。
二次雷达技术交流
强制报告点时,请机组报告,地面统计单雷 达目的显示; C模式代码测试:校飞飞机在穿越每个高度层 时请机组报告高度,地面统计C模式编码显示 高度;
6、二次雷达飞行校验
A模式代码:测试A模式编码0000、1111、 2222、3333、4444、5555、6666、 7777、7500、7600、7700以及SPI测试;
上行询问
下行回答
上行询问 1030MHz 下行回答 1090MHz
1.3、二次雷达工作原理
二次雷达所需目的参数:距离R、方位ɑ、高度、 H
1.3、二次雷达工作原理
问询信号
三脉冲问询体制
P1-P3 模式问询脉 冲 问询波束主瓣
控制波束 辐射P2
P2 旁瓣克制脉冲
(控制脉冲)
尾瓣
询问波束 辐射P1 P3
1.2、SSR与其他监视方式旳区别
二次雷达(A/C/S模式):独立旳、合 作式监视系统 经过地面问询系统根据问询和机 载设备旳应答计算目旳旳距离和方位 角。同步S模式二次雷达增强了飞机寻 址和双向数据链旳功能。
优点:相对一次雷达旳信息愈加详细 缺陷:无法监视没有安装应答机或应答机 失效旳飞机
1.2、SSR与其他监视方式旳区别
2.1、二次雷达总体构造图
2.2二次雷达航空管制信号流程简图
2.3、二次雷达数据信号流程简图
天线座
天线 控制箱
通道切 换开关
询问机 A通道
本地监控显示器 询问机B通道
空中交通管制中心监控席位 机场塔台调度席位 其他引接数据使用者
2.4、二次雷达系统工作流程图
目标数据输出 机载应答机
工作模式设置 监控界面
_空防暗哨_无源雷达
12
电子工程信息
2006年第 3期
3 信号分析和指纹识别 3 脉冲分析独立信道 3 电子参数表 ( EPL ) 3 脉间 ( Intra - pulse)分析 接收站参数 3 频率范围 : 1~18 GHz, 也包含 0. 1~1 GHz 的无线电通信频率 3 可在 0. 1~ 1 GHz和 18~ 40 GHz范围内随 意选择波段 3 瞬间方位角视野高达 120°, 360°(可选 ) 3 探测距离达 450~500km , 在有利的条件下 可长达 600km 3 天线单元 : 尺寸 : 2 m ×0. 9 m 重量 : 300kg 功耗 : 24 V DC / 250W
20 0 2年 无源 探 测 领 域 的 最 新 发 展 是 德 国 罗 克 ·马诺尔研究公司演示的“手机探测系统 ”“/ 蜂 窝雷达 ”( CELLDAR , 是英文 Cellula与 Radar的合 成词 ) 。该系统采用多基地无源技术 ,利用商用移 动电话网络所形成的电磁传输场 ,对陆上 、海上和 空中的移动目标进行探测 、跟踪和识别 ,同时具有 探测在树丛中运动的车辆或直升机的能力 。这是 利 用 与 当 前 的 移 动 电 话 传 输 ( GSM 9 0 0 , 1 8 0 0和 1 900) 以及未来传输 (3G) 相关联雷达频率来完成 的 。目前的试验型设备包括 GSM 电话 (不超过 2 部 ) ,两根天线和 1 台个人计算机 。从原理上来讲 , 它能够探测野外环境中 10~15km 外的地面目标以 及 100km 外的大型飞机 。在用于地面防空时 ,其相 控阵接收机能够采用展开的结构形式或集成在伪 装网中 ;当用于无源机载预警时 ,它既可以集成在
2006年第 3期
电子工程信息
ห้องสมุดไป่ตู้
低空空域监视系统分析

低空空域监视系统分析摘要:我们空管的接受装置,主要就是用于信息上的监测和服务的。
和二次雷达监视雷达高度专门配置从该区域,位置信息和其它数据从通信信道传输和空间车载GPS装置的控制信息,并且每一个的相邻的信息空中交通管制中心的类型,综合后(或集成)处理,跟踪,为监控人员分派飞行显示屏系统上的情况。
同样,低空空域也需要同样的监视服务来保障飞行安全,本文将简单谈论一下低空空域监视系统设计方案。
关键词: 低空空域;监视系统;设计方案引言通用航空在整个社会公益事业上和经济发展上发挥的作用是越来越大。
近年来,由于我国的经济在快速的发展当中,使得在通用航空方面有着无限的潜能。
随着发展的进步,在我们通用航空的环境来说得到了很大的改善和提高。
跟民用航空和商用运输航空公司的发展相比较,对于通用航空的市场需求量是非常之大的。
通用航空运用的范围很广泛,比如说农业,林业,私用,公务,旅游,救援等等。
通用航空产品覆盖也是很广泛的,这样就自然形成了一个非常庞大的产业群,在产业链上也非常之长。
跟房地产产业和汽车产业来对比,通用航空在产业链上会更长和门槛低[1-3]。
进入21世纪,民航运输发展战略有了新的规划。
对于我国的通用航空业来说,我们的认识也有着许多的不足,起步来说也是比较晚,不管是从基础设施设备上,还是外部的环境,都面临很多的基础性问题需要解决。
1 低空空域管理结构低空空域活动一般是说地上2000米以内的距离所飞行活动,我们的通用航空活动一般都是在低空空域进行的。
但是对于我国的空域管制特点来说,我国的低空空域是处于长期没有完全开放的状态。
这个形式在很大程度上制约了我国通用航空公司的发展,也是目前我国在航空领域上一个非常难的难题之一。
2009年,中国民航局李家祥把西安航空基地作为中国通用航空产业的试点园区。
对于我国的低空空域资源上的管理和发展目前都还处于一种试点的阶段。
在通用航空产业园以及相关的空管部门来说在工作上还有着很多的实际运行的不足和缺陷。
相控阵雷达原理
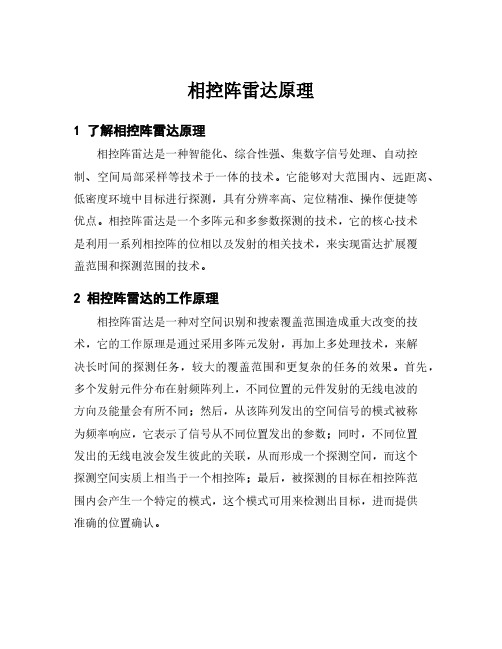
相控阵雷达原理1 了解相控阵雷达原理相控阵雷达是一种智能化、综合性强、集数字信号处理、自动控制、空间局部采样等技术于一体的技术。
它能够对大范围内、远距离、低密度环境中目标进行探测,具有分辨率高、定位精准、操作便捷等优点。
相控阵雷达是一个多阵元和多参数探测的技术,它的核心技术是利用一系列相控阵的位相以及发射的相关技术,来实现雷达扩展覆盖范围和探测范围的技术。
2 相控阵雷达的工作原理相控阵雷达是一种对空间识别和搜索覆盖范围造成重大改变的技术,它的工作原理是通过采用多阵元发射,再加上多处理技术,来解决长时间的探测任务,较大的覆盖范围和更复杂的任务的效果。
首先,多个发射元件分布在射频阵列上,不同位置的元件发射的无线电波的方向及能量会有所不同;然后,从该阵列发出的空间信号的模式被称为频率响应,它表示了信号从不同位置发出的参数;同时,不同位置发出的无线电波会发生彼此的关联,从而形成一个探测空间,而这个探测空间实质上相当于一个相控阵;最后,被探测的目标在相控阵范围内会产生一个特定的模式,这个模式可用来检测出目标,进而提供准确的位置确认。
3 相控阵雷达的应用相控阵雷达在国际及国内有很多的应用,其中最重要的就是监视与武器系统的相关应用。
它具有检测能力强、分辨率高、保密性好等优点,可以有效实现静对豪的对抗监测、敌我识别、武器指导和通信代号认识任务,为军事布署和安全预警提供有力技术支撑。
相控阵雷达还可以用于气象预报、地面图像探测、地下物质探测、医学成像以及全球定位系统等方面的应用和开发,从而有助于我国在智能化、空间扩展以及准确定位等特点上的发展。
总之,相控阵雷达是一种强大的应用技术,它不仅可以实现远距离探测、广范围覆盖,还能有效控制死区。
它具有操作便捷、功率效率高、精度高等特点,极大地提高了空间覆盖能力,有助于实现更复杂的任务。
空间多目标跟踪及精确成像的天基毫米波雷达
关键 词 : 目标 跟 踪 多
多 目标成 像
天基 毫 米 波 雷 达
文 献标 识 码 :A
宽带雷达信号
时 一频 分 析
中 图分 类 号 : TN9 96 5 .
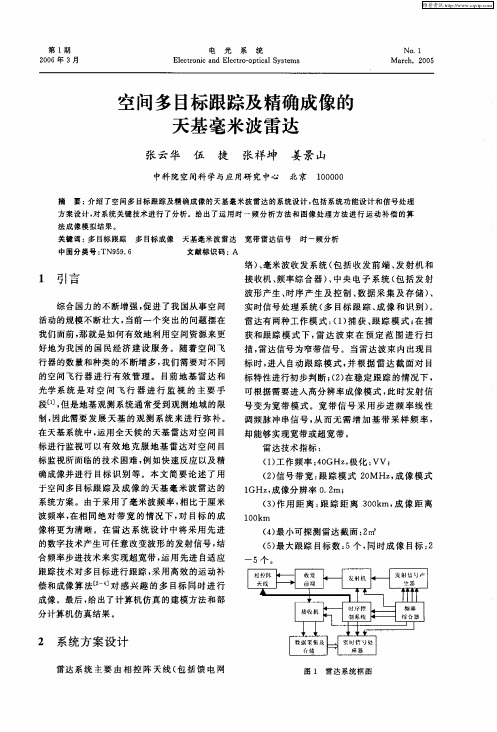
络 ) 毫米 波 收发 系 统 ( 括 收发 前端 、 射 机 和 、 包 发
1 引言
综合 国力 的不断增 强 , 促进 了我 国从 事 空 间
偿和 成像算 法[ 对 感 兴 趣 的多 目ห้องสมุดไป่ตู้ 同时 进 行 2 ] 成像 。最 后 , 出了计算 机仿 真 的建模 方 法 和部 给
—
( ) 大跟踪 目标数 : , 时 成 像 目标 : 5最 5个 同 2
5个
棚 控 阵 天 线 收 发
前端
牡射 机
分计算 机仿 真结果 。
维普资讯
第 1 期
2 0 年 3月 06
电 光
系 统
No 1 . Mac.2 0 rh 05
Elc r n ca d E e t o o t a S s e e to i n l c r — p i l y t ms c
空 间多 目标跟踪及精确成像的 天基毫米波雷达
的空间飞行 器 进 行 有 效 管 理 。 目前 地 基雷 达 和 光 学 系统 是 对 空 间 飞 行 器 进 行 监 视 的 主 要 手 段[ , 1 但是 地基 观测 系统 通 常受 到观测 地域 的 限 ]
制, 因此需要 发展 天基 的 观 测 系 统来 进 行 弥 补 。 在天 基系统 中 , 运用 全 天候 的天 基雷 达对 空 间 目
l O m O k
系统 方案 。由于采 用 了毫米 波频 率 , 比于厘 米 相 波频率 , 在相 同绝 对 带 宽 的 情 况 下 , 目标 的成 对 像将 更为清 晰 。在 雷 达 系统 设 计 中将 采用 先 进
现代雷达信号处理

基于人工智能的雷达信号处理技术利用机器学习、深度学习等算法对雷达回波数据进行处理,自动提取目标特征, 实现高精度的目标检测、跟踪和识别。通过训练神经网络模型,可以快速处理大量数据,提高雷达系统的实时性 能。
基于量子计算的雷达信号处理技术
总结词
利用量子计算的优势对雷达信号进行优化处理,提高数据处理速度和计算精度。
雷达目标识别技术是利用雷达回波信息对目标进行分类和 识别的技术,是现代雷达系统的重要应用之一。
通过提取和分析目标的形状、尺寸、速度等特征信息,结 合人工智能和模式识别算法,实现对目标的自动分类和识 别,提高雷达的应用价值。
03 雷达信号处理的应用
军事应用
01
02
03
目标检测与跟踪
雷达信号处理在军事领域 中广泛应用于目标检测与 跟踪,如导弹制导、火控 系统等。
感谢您的观看
基于生物启发的雷达信号处理技术从生物感知机制中获得 灵感,创新雷达信号处理方法。例如,仿生雷达系统借鉴 昆虫的复眼结构和感知机制,通过阵列天线和信号处理算 法实现高分辨率和高灵敏度的目标感知。此外,基于生物 神经网络的雷达信号处理方法也正在研究和发展中,以提 高雷达系统的感知能力和适应性。
THANKS FOR WATCHING
解决方案
采用高速数字信号处理器、并行处理技术和高效的算法设 计,以提高雷达的数据处理速度和动态范围。
高精度测距和测速问题
总结词
高精度测距和测速是现代雷达信号处理的另一个关键问题。
详细描述
随着雷达应用范围的扩大,对测距和测速精度的要求也越来越高。如何提高测距和测速的精度是现代雷达信号处理面 临的挑战之一。
现代雷达信号处理
目录
• 雷达信号处理概述 • 现代雷达信号处理技术 • 雷达信号处理的应用 • 现代雷达信号处理面临的挑战和解决方案 • 新一代雷达信号处理技术展望
雷达
波段标准
二战后雷达的波段有三种标准,德国标准、美国标准和欧洲标准。由于德国和美国的标准提出的较早,大多 数使用的是欧洲新标准:
欧洲新标准下的部分波段表 现用微波分波段代号 我国的频率划分方法
5.按照天线扫描方式分类,分为机械扫描雷达、相控阵雷达等。
6.按雷达频段分,可分为超视距雷达、微波雷达、毫米波雷达以及激光雷达等。
其中,相控阵雷达又称作相位阵列雷达,是一种以改变雷达波相位来改变波束方向的雷达,因为是以电子方 式控制波束而非传统的机械转动天线面方式,故又称电子扫描雷达相控阵技术,早在30年代后期就已经出现。 1937年,美国首先开始这项研究工作。但一直到50年代中期才研制出2部实用型舰载相控阵雷达。
自动目标识别则可使武器系统最大限度地发挥作用,空中预警机和JSTARS这样的具有战场敌我识别能力的综 合雷达系统实际上已经成为了未来战场上的信息指挥中心。
发展历史
路基雷达1842年,奥地利物理学家多普勒(Christian Andreas Doppler)率先提出利用多普勒效应的多普 勒式雷达。
1864年,英国物理学家麦克斯韦(James Clerk Maxwell)推导出可计算电磁波特性的公式。 1886年,德国物理学家赫兹(Heinerich Hertz)展开研究无线电波的一系列实验。 1888年赫兹成功利用仪器产生无线电波。 1897年汤姆逊(JJ Thomson)展开对真空管内阴极射线的研究。 1904年侯斯美尔(Christian Hülsmeyer)发明电动镜(telemobiloscope),是利用无线电波回声探测 的装置,可防止海上船舶相撞。 移动雷达1906年德弗瑞斯特(De Forest Lee)发明真空三极管,是世界上第一种可放大信号的主动电子元 件。 1916年马可尼( Marconi)和富兰克林(Franklin)开始研究短波信号反射。 1917年罗伯特·沃特森·瓦特(Robert Watson-Watt)成功设计雷暴定位装置。
空间监视雷达工作模式研究

( 1 .装 备 学 院 研 究生 管 理 大 队 , 北京 1 0 1 4 1 6 2 .装 备 学 院 航 天 指 挥 系 , 北京 1 0 1 4 1 6 )
摘
要 分析 和讨论 了现 有几 种 空间监视 雷达 的工作 模 式、 特 点及不足 ,
此 基础 上 , 提 出利用 波束 驻 留模 式进 行 空 间 目标 探测 的思想 , 从 雷达检 测 性能方 面
f o r ma n e e o f r e s i d i n g mo d e i s mu c h mo r e c o mp e t i i t v e i n f a r - 一 r a n g e t a r g e t d e t e c t i o n p o t e n ia t 1 .F i n a l l y ,
Xu Ca n , LI Zhi 。
(1 _Comp a ny o i Po s t g r a d u a t e Ma n a g e me n t ,Ac a d e my o f Eq u i p me n t ,Be i J mg 1 0 l 4 l 6,Ch i na ;
文 献 标 志 码 A DOI 1 0 . 3 7 8 3 / j . i s s n . 2 0 9 5 — 3 8 2 8 . 2 0 1 3 . 0 3 . 0 2 0
Sto n Mo d e o f Spa c e Su r v ei l l a n c e Ra d ar
t he f e a s i b i l i t y of t h e mo de i s d i s c us s e d a n d de t e c t i on pe r f o r ma n c e o f t he s e t wo mo de s i s c o mpa r e d t hr o u gh a c a de mi c a na l y s i s a n d s i mul a ion t . Ke y wo r d s s p a c e s ur v e i l l a nc e r a d a r;be am r e s i d e s mod e;be a m s c a n ni n g mo de ;f a r - 一 r a nge t a r ge t
浅议雷达技术及军用雷达发展趋势
浅议雷达技术及军用雷达发展趋势众所周知,雷达探测目标的原理是模仿蝙蝠夜间飞行捕食过程,即通过天线发出无线电波,无线电波遇到障碍物就反射回来,显示在荧光屏上,从而发现目标。
当前,雷达技术已广泛应用于导航、海洋、气象、环境、农业、森林、资源勘测等领域,在军事侦察中,雷达更是将利用电磁波对目标检测、定位、跟踪、成像、识别的功能发挥的淋漓尽致。
那么雷达究竟经历了怎样的发展历程?军用雷达怎么分类?又有什么样的技术和发展趋势呢?一、雷达发展历史简介1 早期雷达的发展雷达的基本概念形成于20世纪初。
但直到第二次世界大战前后,雷达才得到迅速发展。
1922年,意大利Gˑ马可尼发表了无线电波可能检测物体的论文。
同年,美国海军实验室利用双基地连续波雷达检测到在其间通过的木船。
1925年,美国开始研制能测距的脉冲调制雷达,并首先用它来测量电离层的高度。
1936年,美国研制出作用距离达40km、分辨力为457m的探测飞机的脉冲雷达。
1938年,英国已在邻近法国的本土海岸线上布设了一条观测敌方飞机的早期报警雷达链CH(Chain Home)。
2 二战期间的雷达发展1939年英国科学家发明了大功率磁控管,克服了甚高频雷达波束和频带窄的缺点,使实用雷达步入了微波频段。
1940年由英国设计的10cm波长的磁控管在美国生产。
20世纪40年代美国辐射研究室把微波新技术应用于军用机载、陆基和舰载雷达取得成功,其代表产品是SCR -270 机载雷达、SCR -584 炮瞄雷达和AN/APQ-机载轰炸瞄准相控阵雷达。
二战中,俄、法、德、意、日等国都独立发展了雷达技术,但除美、英外,雷达频率都不超过600MHz。
3 50、60年代的雷达发展上世纪50、60年代,由于航空航天技术的飞速发展,出现了诸如脉冲多普勒雷达、合成孔径雷达、相控阵雷达体制等新体制雷达。
新一代雷达发展方向是全固态电扫相控阵多功能雷达。
雷达信号和数据处理的数字化革命、半导体元件、大规模和超大规模集成电路的应用,使雷达技术的发展日臻完善并达到比较高的水平。
“雷达原理”课程教学方法探索

2022年1月第3期Jan. 2022No.3教育教学论坛EDUCATION AND TEACHING FORUM“雷达原理”课程教学方法探索马聪慧,肖龙龙,潘显俊(航天工程大学 航天指挥学院,北京 101416)[摘 要] 雷达是现代情报侦察监视的重要手段之一,是国防军事和国民经济发展中不可或缺的力量。
“雷达原理”是电子信息类专业的代表性课程,如何提升该课程的授课效果一直是教学中值得探讨的热点。
在分析当前本科生“雷达原理”课程教学特点的基础上,从激发学生的学习兴趣、培养学生分析和解决问题的能力出发,结合对一线教学实际的思考,从三个方面提出可行的教学建议,显著改善了“雷达原理”课程的教学成效,也为“互联网+”环境下的以学生为中心的教学模式改革提供了有益的启示。
[关键词] 雷达原理;课程教学;教学方法[基金项目] 2020年度全军重点院校建设精品课程建设工程“情报获取技术基础”(4142ZK314)[作者简介] 马聪慧(1987—),女,湖北襄阳人,博士,航天工程大学航天指挥学院讲师,主要从事雷达原理、遥感信息获取、合成孔径雷达自动目标识别研究;肖龙龙(1984—),男,湖南邵阳人,博士,航天工程大学航天指挥学院副教授,主要从事遥感信息获取、信息支援研究;潘显俊(1980—),男,安徽六安人,博士,航天工程大学航天指挥学院副教授,主要从事雷达信号处理、电子对抗研究。
[中图分类号] G642.4 [文献标识码] A [文章编号] 1674-9324(2022)03-0129-04 [收稿日期] 2021-09-17“雷达原理”是电子信息工程雷达专业的基础课程,着眼于培养学生扎实的雷达理论功底和创新实践能力,通过课程学习,使学生了解雷达的发展现状与应用,掌握雷达的基本概念与组成、雷达工作的基本原理、雷达的距离向高分辨与方位向高分辨、合成孔径雷达基本原理等内容[1,2],使学生具备运用雷达相关原理分析解决实际问题的专业技能和专业素养。
合成孔径雷达的应用及工作模式
合成孔径雷达的应用及工作模式摘要:由于合成孔径雷达具有全天时、全天候、多波段、多极化、可变侧视角及高分辨率等优点,广泛应用于地形、地貌测绘,地球表面信息获取,地下信息收集,甚至在恶劣的环境下也能以较高的分辨率提供详细的地面测绘数据和图像。
关键词:合成孔径雷达应用工作模式雷达(radar),源于英文radio detection and ranging的缩写,原意是“无线电探测和测距”,即用无线电方法发现目标,测定目标在空间的位置,因此雷达也被称为“无线电定位”。
合成孔径雷达(synthetic aperture radar, SAR)的概念是1951年6月由美国Goodyear宇航公司的Carl Wiley首次提出的。
SAR是一种主动式微波成像传感器,它利用脉冲压缩技术提高距离分辨率,利用合成孔径原理提高方位分辨率,从而获得大面积的高分辨率雷达图像。
合成孔径雷达的工作原理是对在平台前进方向的不同位置上所接收的包含相位信息的信号进行记录和处理,得到比实际天线更长的假设天线进行观测的结果。
SAR的原始数据是把雷达天线发射出的宽幅脉冲到达地表后的后向散射信号以时间序列记录下来的数据,在原始数据中,来自地表某一点P的后向散射信号被拉长记录到仅相当于脉冲宽度的距离向上。
但SAR得到的原始数据还不是图像,只是一组包含强度、相位、极化、时间延迟和频移等信息的大矩阵,需要经过复杂的处理,才能得到通常意义上的图像。
一、合成孔径雷达的特点及应用SAR遥感技术是从空间对地观测的一种有效手段,自20世纪50年代问世以来,由于比其它雷达具有优势,在国民经济和国防建设中得到了广泛应用。
(一)SAR成像不依赖光照,具有全天候探测能力由于SAR成像不依赖光照,而是靠自己发射的微波,能穿透云、雨、雪和烟雾,具有全天时、全天候成像能力,这是SAR遥感最突出的优势。
例如,在X波段,波长为3.2cm时,微波穿过4km浓云后,其强度仅衰减1dB,对地面目标的观测基本没有影响。
超视距雷达原理-概述说明以及解释
超视距雷达原理-概述说明以及解释1.引言1.1 概述超视距雷达是一种能够实现远距离目标探测和跟踪的雷达系统。
与传统雷达相比,超视距雷达具有更大的探测范围和更高的分辨率。
它可以在远离目标的情况下进行有效的探测和跟踪,因此在许多领域有着广泛的应用前景。
超视距雷达的工作原理基于电磁波与目标之间的相互作用。
当超视距雷达发射电磁波时,它会经过大气层的散射和折射,然后与目标相互作用。
目标会将一部分电磁波吸收或反射回雷达系统。
通过接收和分析反射回来的电磁波,超视距雷达可以确定目标的位置、速度和其他相关信息。
超视距雷达的应用领域非常广泛。
在军事领域,超视距雷达可以用于侦察、监视和追踪敌方目标。
它能够提供重要的情报支持,帮助军队实时了解敌情并采取相应的行动。
此外,超视距雷达也可以应用于民用领域,例如航空、航海、交通监控等。
它可以用于飞机和船只的导航和监测,提高交通安全和效率。
总之,超视距雷达作为一种先进的探测和跟踪系统,具有重要的应用价值。
它的概念和原理为我们提供了一种突破传统雷达技术限制的方式。
未来,随着技术的不断进步和创新,超视距雷达将继续发展和演进,为各个领域带来更多的机遇和挑战。
因此,对超视距雷达技术的研究和应用具有重要意义。
1.2 文章结构文章结构部分的内容可以按照以下方式编写:文章结构本文主要分为引言、正文和结论三个部分。
引言部分首先概述了超视距雷达的背景和重要性,接着介绍了文章的结构和目的。
正文部分主要包括了超视距雷达的定义和原理、工作方式以及应用领域。
在超视距雷达的定义和原理部分,将详细介绍超视距雷达的基本概念和工作原理,解释其如何实现远距离探测和跟踪目标。
在超视距雷达的工作方式部分,将介绍它的运行方式和信号处理方法,包括波束形成、目标检测和数据处理等。
在超视距雷达的应用领域部分,将列举一些典型的应用场景和案例,例如空中交通管理、海上巡航和军事侦察等。
结论部分将总结本文对超视距雷达的重要性进行归纳,强调其在现实生活中的广泛应用和深远影响。
多点定位场面监视雷达信号处理方法探究
多点定位场面监视雷达信号处理方法探究关键词:多点定位;场面监视;处理方法随着社会的不断发展,全球航空业以及水面舰船的发展也非常的快速,随着客流量的不断增加,航空公司的规模也越来越大,这也导致了机场的飞机次数的增加。
在偌大的活动区域内,由于多种环境因素的原因,需要有效的解决飞机起飞和降落的拥挤和冲突的相关交通安全问题[1]。
因此,多点定位系统作为一种先进的低空飞行器的机场场面的有效的监视方案,可以通过雷达信号准确的确定目标的具体位置,从而可以更加高效的利用多点定位系统,可以对移动目标进行探测和监视,从而提高机场场面的交通安全和飞行安全。
作为现代化的雷达是无线探测技术中的主要手段,同时也是作为在现代空中交通管制系统中的机场场面监视设备之一。
因此场面监视雷达可以准确确定目标,同时也可以获取相关移动机的移动信息,具有高效的实时性和检测度。
一、多点定位场面监视雷达定位原理国外最早提出并应用多点定位的相关技术,为民航空管系统技术完善提供了新思路。
多点定位场面监视技术能够充分利用民航飞机现有的应答信号,对其进行科学分析和计算获得目标的精确位置信息。
该技术在应用中能够完全兼容单脉冲二次雷达和 S 模式二次雷达,并且能够满足 ADSB-OUT 传输要求,所以在应用过程中能够很好地接受飞机的二次代码和 S 模式地址,并且能够对其进行有效解码,具有优异的目标识别能力和高精度定位能力。
多点定位场面监视雷达在应用中首先需要在机场附近进行传感器的布置,然后借助近端单元捕获飞机和其他相关车辆的应答信号,然后结合远端站的捕获的各种信号,进行进一步的信号检测、处理和解码,最终计算出各站的应答信号到达时间,然后送至中心匹配站,与应答码进行进一步的匹配,借助多站 TOA 获得具体的位置信息。
除此之外,该技术还与 ADS-B 技术相兼容,其数据的更新率甚至能够达到每秒一次,系统的建设成本只有 X 波段场面监视雷达系统的一半,广域空中定位能够精确到 50m,而地面的定位精度更是能够达到 10 米之内,具有很好的目标标识能力。
【combat aircraft radars】战鹰之“眼”全球战斗机雷达新进展
【Combat Aircraft Radars】战鹰之“眼”——全球战斗机雷达新进展不管未来战争样式如何变化,掌握制空权与否都会对战争的进程和结局产生重大影响。
在夺取空中优势、摧毁敌方武力、实施战略威慑与战争制胜过程中,空中战鹰——战斗机发挥的重要作用是不言而喻的。
而战斗机正是凭借其“火眼金睛”——雷达,占尽先机优势,达到“先敌发现,先敌打击、先敌摧毁、先敌制胜”的目的。
机载雷达使战斗机具备“先敌发现,先敌打击、先敌摧毁、先敌制胜”的能力从二战时期雷达产生至今,战机雷达的功用和性能都已大为改观。
目前先进战机雷达多采用有源相控阵(AESA)技术。
AESA的诸多优势,包括无需转动天线即可增大视场(FOV)、多任务模式之间可快速切换、“适应性降级”、确保获得最大空/海/地态势感知等,使其在今后一段时间内仍将是战机雷达的主导技术。
美国雷声公司是有源相控阵(AESA)技术的领跑者正是拥有了先进的雷达,才使第五代战斗机成为真正意义上的多功能战斗机。
不过,相比传统机械扫描雷达,AESA雷达价格较为昂贵,因而在军费紧张情况下,机扫雷达仍有相当的吸引力。
美国诺斯罗普·格鲁曼公司有源相控阵(AESA)针对台湾推出的繁体中文技术产品手册战机雷达的频段通常选择X波段(8.5~10.68GHz)。
这是因为,在雷达设计中,很难找到适用海、陆、空所有环境的完美方案,其频率选择通常需要折衷权衡考虑,而其中一个重要考虑因素则是大气水分(湿度)对雷达射频能量的影响,因为它会降低雷达性能。
相对而言,X波段对大气湿度有良好的穿透性,因此独具优势。
同时,X波段天线尺寸灵活,可安装在飞机前端,不会影响战机性能。
此外,X波段雷达的监视范围达185.2公里以上,有助于战斗机在远距离上准确探测和识别目标。
战机雷达的频段通常选择X波段(8.5~10.68GHz)当今世界领先战斗机雷达近期发展情况如下:美国作为战斗机雷达前沿技术的风向标,美国正在实施多项战斗机雷达升级计划,近期最主要是美空军“战斗机航空电子设备按计划扩展”(CAPES)计划。
雷达监视系统

按工作频率分类
1、按波长称呼: 米波雷达 分米波雷达 厘米波雷达 毫米波雷达
2、按波段代号: L波段雷达 S波段雷达 X波段雷达等
测量目标的测量:
1、测高雷达 2、两坐标雷达 3、三坐标雷达 4、测速雷达 5、目标认别雷达
三、雷达的组成
• 发射机 • 接收机 • 天线 • 收发转换开关 • 显示器
四、雷达的工作原理
发现目标的原理:
反射
测定目标位置的原理
目标的位置表示方法
极坐标
R
DH
D=R cos
H=R sin
1、测距
R=ctr/2 c----电磁波传播速度 tr----电磁波传播时间
若r以米计,时间以微秒计 ,则: R=150t
如果距离150KM,电波往返的时间只有 1000微秒。
• 影响雷达的探测距离: 脉冲重复频率越低,探测距离越远; 脉冲重复频率越高,探测距离越近。
• 远程警戒雷达的脉冲重复频率为几十到几 百Hz,微波雷达为几千Hz。
5、脉冲宽度
• 指发射脉冲信号的持续时间,一般在0.05~20 微秒之间 ;
• 影响:
探测距离; 距离分辨力。
• 米波:5~20微秒; 厘米波:0.5~2微秒; ATC:0.05~2微秒
雷达监视系统
主要内容:
第一章:雷达概述 第二章:雷达方程 第三章:雷达收发设备 第四章:民航一次雷达 第五章:A/C模式二次雷达 第六章:S模式二次雷达
第一章:雷达概述
什么是雷达? 雷达
Radio Detection 发现目标
RADAR
And Ranging 测定位置
利用无线电波发现目标并测定其位置的设备。 依据规律:
作用距离不好。 • 太窄:扫描范围太小。 (2)波束形状:针状、扇形和余割平方波束。 (3)余割平方波束辐射格式: • 目的:使同一高度而不同距离的目标具有相等
空管雷达站一体化监控系统分析与设计
第30卷第4期2016年8月空军预警学院学报Journal of Air Force Early Warning Academy V ol.30No.4Aug.2016收稿日期:2016-06-15作者简介:张衡(1979-),男,讲师,博士,主要从事空管雷达研究.空管雷达站一体化监控系统分析与设计张衡,徐廷新,林强,张堃(空军预警学院,武汉430019)摘要:为了提高空管雷达的保障能力,提出了一种空管雷达站一体化监控系统设计方案.首先对空管雷达站监控系统进行了需求分析;然后从系统任务与功能、总体架构、软件设计等三个方面提出具体设计方案,并给出部分监控单元的实现方法;最后对所设计的系统进行了试点试用.试用结果表明该系统安全、实用、可靠.关键词:空管雷达;一体化;监控系统中图分类号:TN95文献标识码:A 文章编号:2095-5839(2016)04-0244-04空管雷达是空管系统的重要信息源,其情报的可靠性和质量至关重要.空管雷达对工作环境要求较高,不但对环境的温度、湿度有严格的要求,还需要柴油发电机组、稳压源、UPS 、防雷系统、雷达信息管理系统及空调等一系列配套设备的安全运行[1].目前,各空管雷达站没有配备专门的环境监测设备,主要采用24小时专人值班,定时巡查环境及附属设备,依靠经验进行温度、湿度调节和配套设备的监护.这种方式不仅工作量大,而且不容易及时发现故障,对发生故障的责任也不能科学追溯;另外,这种方式还容易导致信息反馈不灵,主管部门不能及时掌握各空管雷达站设备的“动态”情况,各空管雷达站工作环境和配套设备的运行数据也无法分类保存、统计归档和分析研究.为了改善这种状况,确保空管雷达工作的安全、可靠,研究一种科学合理、行之有效、适合空管雷达运行保障的集中监控系统非常必要.本文对空管雷达的监控系统需求进行了分析,提出一种空管雷达站一体化监控系统设计方案;结合部分监控单元,给出其实现方法.1监控系统需求分析空管雷达站采用固定站建设模式,建设有专用的空管楼、天线塔、电站房等,配备有柴油发电机组、稳压源、UPS 、空调等配套设备,所有设备均长年全天24小时不间断开机,配套设备大多冗余配置,以实现空管雷达情报保障的连续性、可靠性.由于设备种类数量较多、并且分散在空管雷达站的不同区域,加上缺乏智能化的集中监控系统,给设备状态监控管理带来较大难度.1)供配电集中监控需求空管雷达站供配电系统设备主要由柴油发电机组、配电切换柜、隔离变压器、稳压源、UPS 电源等设备组成.空管雷达对供电稳定性与品质要求较高,由于供配电设备数量较多,一旦故障没有得到及时处理,造成供电中断,很可能造成空管雷达故障,使雷达情报中断.因此,将供配电设备集中监控,使空管雷达站正常值班就可以实现监控,不再需额外的值班.2)设备运行环境监控需求空管雷达站设备运行场所主要包括天线平台、天线基座房、电子设备机房、监控机房、柴油发电机房、配电室等.这些场所的设备运行都有一定的环境条件要求,在没有监控措施情况下,设备运行必须有人值守.环境监控的要素主要包括温度与湿度,同时需要增加对空调设备停电又来电的自动恢复工作功能.3)设备与人员安全监控需求空管雷达站具有基本的防火措施,通过增加重点部位的烟雾报警、视频报警、音频监视等,对空管雷达站的预防火灾、人员非法侵入、设备运行异常等情况进行监控.4)设备状态统计管理需求实现空管雷达供配电环境安全集中监控后,可以收集与记录设备的大量工作状态数据,通过统计分析,及时发现设备工作性能下降或异常的情况,尽早消除故障隐患,同时提高部队的装备管理水平.DOI:10.3969/j.issn.2095-5839.2016.04.003第4期张衡,等:空管雷达站一体化监控系统分析与设计2452监控系统设计方案监控系统的设计应确保系统长期安全稳定运行,同时也应考虑系统建设的过程特点及全寿命周期费用,使得系统具有高度的可扩展性及可维护性,能充分适应各空管雷达站建设实际,实现对空管雷达工作环境的集中有效监控,从而提高空管雷达系统的可运行、维护、控制和管理能力.2.1监控系统的任务与功能监控系统实现对空管雷达的动力系统、环境系统、安防系统和其他设备等4个部分的遥测(远距离对模拟信号进行测量,如测量电压、电流和温度、湿度等)、遥信(远距离对开关量信号进行测量,如测量水浸、门禁、设备是否处于正常状态)、遥控(远距离对设备的开关操作,如开启发电机、开/关空调等)、遥调(远距离对模拟信号值进行设定,如空调温度、湿度的设置)功能,把现场分散的人工巡视和操作变成集中的维护和管理.通过监控系统的实时监控、报表自动化、故障告警与处理、智能分析、数据视频联动等多种监测手段来提高维护管理水平,保证空管雷达及附属设备的运行和机房安全.系统对各部分的监控任务与功能如下.1)动力系统①供配电.监控系统对配电柜的主回路进行检测.检测的参数包括:电流、电压、有功功率、无功功率、实际功率和功率因数等.另外,系统还对主回路的重要开关的状态进行检测,能够显示和存储监测参数的变化曲线,可以对报警状态进行显示、存储和处理[2].②柴油发电机组.监控系统监测每个柴油发电机组输出电压、电流、频率(转速)及水温、油位、油压等参数;柴油发电机组运行状态、燃油阀开关状态等各种状态的实时记录和报警处理,并进行遥控操作.③UPS.在提供通信协议的情况下,监控系统检测的参数主要包括三相输入电压、直流输入电压、三相输出电压、三相输出电流、输出频率、蓄电池电压、蓄电池温度、同步/不同步状态、UPS/旁路供电、市电故障、整流器故障、逆变器故障、旁路故障等;监控系统能显示和存储监测参数的变化曲线,可以对报警状态进行显示、存储和处理.④稳压源.监控系统监测稳压源的参数和状态.参数包括输入电压、输入电流、输出电压、输出电流等;状态包括告警状态、可控硅开关状态、接触器开关状态等;能够显示和存储监测参数的变化曲线,可以对报警状态进行显示、存储和处理[3].⑤市电.监测市电的电压、电流和功率等参数,并对报警状态进行显示、存储和处理.2)环境系统①温度和湿度监控.实时显示并记录每个温/湿度传感器所检测到的室内温度与湿度的数值,并可设定每个温/湿度传感器的温度与湿度的报警上限与下限值,越限时发生告警.②图像视频监控.通过在雷达机房、入口、天线塔等地点安装网络摄像机,实时监控这些地点的状况,拍摄到的视频画面直接传输到网络硬盘录像机进行压缩并存储;管理人员可以通过客户端实时查看视频画面,直观地了解和掌握监控区域的视频动态,实现故障和图像的联动控制.③漏水监测系统.漏水检测是对雷达主机房空调或者窗户等处进行监测.它通过专业漏水检测绳来探测漏水情况,一旦发生漏水,监控系统可以定位检测具体的漏水位置,且在现场有声光报警产生.3)安防系统①智能门禁管理.由门禁控制器、门禁卡、读卡器、电控锁、网络扩展器、门禁管理软件等构成,监控系统实现对空管雷达工作场所出入控制、进出信息登录、保安防盗、报警,同时提供多种形式的联网功能.②消防系统监控.监控系统通过采集烟雾传感器、消防报警主机的报警信号实时监测消防情况.当系统一旦检测到火警,监控系统以直观的画面显示报警信息并作报警通知.③防雷系统.监测配电柜主输入通路上防雷器的工作状态,对防雷器被雷击的次数和工作状态进行实时记录和报警处理.4)其他设备①空管雷达.监测空管一、二次雷达工作的状态,对雷达故障进行报警并对开机时间、故障时间和待机时间进行记录.②空调.监测空调的进风口和出风口的温度、湿度,实现对机房空调制冷、加热、加湿、除湿等功能的智能控制.2.2监控系统总体架构空管雷达站一体化监控系统可分为采集层、传输层和应用层3个部分.系统总体架构如图1所示.采集层主要是对各类环境参数、雷达及附属设备的运行参数等信息进行采集,并进行数据化处理;传输层采用TCP/IP网络进行数据空军预警学院学报2016年246传输;应用层主要包括服务器、本地客户端、远程客户端和消息报警器等.服务器的主要功能是系统数据的存储和客户端的管理,是应用层的服务端.本地和远程客户端主要通过监控软件向用户提供实际的应用操作,当空管雷达站内发生故障时,系统通过声光、短信、电话和邮件等各类报警方式向用户进行告警.市电柴油发电机组稳压源UPS配电柜各监视点视频摄像头各监测点温湿度传感器各监测点水浸传感器门禁各监测点烟雾传感器各防雷计数器空管雷达空调TCP/IP网络采集层服务器本地客户端远程客户端消息报警器短信电话邮件传输层应用层声光图1空管雷达站一体化监控系统总体架构2.3监控系统软件设计系统软件完全建立在标准的WEB 构架上,采用.NET 平台、XML 协议数据接口处理来自各个现场的报警信息.通过后台服务的模式受理、分析、处理、校验这些数据,保证报警信息及时记录和分析,为用户提供参数、性能统计、维护记录报表等数据[4-5].监控平台通信机可按用户方要求发送监控数据到上一级集中控制中心.系统软件拓扑如图2所示.软件功能实时监控告警管理数据管理配置管理增值管理四遥监控人机界面告警联动告警过滤告警查询多媒体显示逻辑控制曲线管理报表管理信息查询数据存储备份设备运营管理密码权限配置告警参数配置组态功能配置通信参数配置数据参数配置防盗管理上报管理图像监控管理系统日志管理IT设备管理图2系统软件拓扑1)软件功能设计①用户操作.用户操作提供帮助、事件打印、远端监控等功能.系统根据不同的操作者划分了多级操作权限,操作者通过唯一的用户名密码登录,所有重要操作如告警指标修改、遥控等,都有记录,且不可删除.②系统警报管理.在有紧急的告警信息到来时,系统会立即推出发出告警信息监控点的画面,发出声光报警,可以帮助监控人员找出问题,及时处理.而且可以拨通当值人员的手机,通知当值人员.③系统报表管理.系统将所保存的操作记录、日志并生成各种报表进行管理,可按用户的选择生成报表,显示或排序可记录的操作信息(包括操作者和操作时间),能由操作人员手工填写备注信息,具有打印功能.各种报警记录均可导出生成Word 或Excel 文档.④扩展功能.当监控设备的数量增加或减少时,操作人员可以通过软件定义修改设备的相关信息(名称、报警参数设置),不需要重新编程.⑤人机界面.监控系统使用全中文界面,其层次和结构清晰明了,可以及时准确地反映设备的状态.⑥系统在线维护.系统应支持在线维护,支持实时的修改和维护.系统在进行修改维护时,参数采样、数据存储和报警等功能不受影响;同时,支持设备数量增加或减少,支持设备参数在线修改.2)通信设计服务器使用标准的MODBUS 协议来完成与各监控单元的通信.服务器通过循环扫描的方式对各监控单元参数和状态进行读取[6].各监控单元传输的数据包括单元地址、标识号、参数和差错校验4个部分.服务器对监控单元发送的指令也包含地址码、标识码、操作码和差错校验4个部分.监控单元仅会接收和自己地址码一致的指令,并做相应的操作.3监控单元设计实例空管雷达站一体化监控系统的监控单元主要包括:供配电、柴油发电机和UPS 等15个监控单元.本文以UPS 和空调单元为例进行说明.3.1UPS 监控单元目前,实现对UPS 监控的方法包括基于串行通信方式、基于Web 和基于SNMP 的监控技术.考虑到通信距离和服务器资源等因素,该系统采用基于SNMP 的监控技术[7-8].1)硬件设计该监控单元的硬件连接结构如图3所示,UPS 通过RS232电源发生电路与智能通信转换模块(USR-TCP232-401)相连,智能通信转换模块图3UPS监控单元硬件连接结构第4期张衡,等:空管雷达站一体化监控系统分析与设计247代替相应的计算机作为网络的一个节点接入网络,客户端通过访问UPS 的IP 地址,就可对相应的UPS 进行监控.2)数据采集设计数据采集程序与串口通信方式设置为模拟COM232方式,将UPS 所在的智能通信转换模块IP 及端口映射成指定的模拟COM 端口.数据采集程序采用3个线程:第1个线程周期性地向串口发读取状态指令;第2个线程实时检测各COM 端口是否有数据到达;如果有数据到达,则启动第3个线程对数据进行处理.UPS 监控单元界面如图4所示.图4UPS 监控单元界面3.2空调监控单元目前国内空管雷达站多数使用普通的民用(商用)空调作为电子设备机房空气温度调节设备,不具备监控和自动调节功能.一旦遇到断电,空调即停止工作,即使外界电网恢复供电,一般的空调机都不会自动检测来电并自动启动.解决办法是采用空调控制器来实现对空调的智能控制.空调控制器包括红外接收电路和红外发送电路两部分[9].红外接收电路利用单片机的输入捕捉功能捕捉载波的跳变沿,并通过定时器计时,记录载波的周期和红外信号的波形特征信息,进行实时编码;红外发送电路在存储器中获取某红外编码指令后,将信号发送出去,达到红外控制电器的目的.1)红外接收电路设计接收电路主要是学习遥控信号,其设计如图5所示.该电路采用可实现光电转换、放大与解调的红外接收头1838来实现对38kHz 红外信号的解调,得到串行的数字信号.红外接收头1838图5红外接收电路的输出为高低电平的脉冲,接收码也是由高低电平的脉冲构成的,利用高低电平的不同组合(周期和特征),便可以形成需要的编码.2)红外发射电路设计红外发射电路通过发送存储的红外编码来实现对空调的遥控,其设计如图6所示.该电路采用普通发射头D2和D3,对单片机产生的38kHz 的脉冲信号进行放大和发射.0 FC1图6红外发射电路4结束语空管雷达站一体化监控系统已在某空管雷达站进行了试用.试用结果表明这种以监控系统为中心的综合管理模式大大提高了空管雷达的保障能力:管理人员可以随时掌握各空管雷达工作环境及配套设备的工作性能,维护人员能及时发现并准确判断故障,大大提高工作效率,为实现无人或少人值守打下基础;通过对设备历史数据的研究和分析,可以更好地维护设备,延长设备使用寿命,使设备管理更具有科学性.参考文献:[1]林腾.做好空管雷达设备维护确保飞行安全[J].中国新通信,2015,17(13):35.[2]曹中来.有关智能变电站一体化监控系统设计方案的分析[J].数字技术与应用,2013(11):166.[3]郭辉.电力系统监控技术中对SCADA 自动化软件的合理应用[J].湖南水利水电,2013(5):81-83.[4]廖代英.人工技能技术在电力监控中的应用[J].广东科技,2013,22(18):117.[5]马知遥.UPS 接口转换卡的设计与实现[J].山西电子技术,2011(3):13-14.[6]王秀丽,潘雷,顾贵芬.基于组态技术的机房监控系统设计[J].实验室科学,2015,18(6):60-63.[7]翁康静,马林.计算机机房监控系统初探[J].机械工程与自动化,2011(3):187-188.[8]张宏杰,耿多,李瑛莉.机房监控系统方案及关键技术[J].宁夏电力,2010(5):33-36.[9]徐士斌.机房监控系统的设计与实现[D].南京:南京理工大学,2013:47-48.(下转第252页)空军预警学院学报2016年252信号采集系统的平滑兼容.该设计为多种型号的雷达视频信号的采集提供了一个统一平台,具有一定的实用和推广价值.参考文献:[1]邬琦,杨江涛,马喜宏.基于FPGA 的高速信号采集电路的设计与实现[J].实验室研究与探索,2015,34(4):124-128.[2]王晨辉,吴悦,杨凯.基于STM32的多通道数据采集系统[J].电子技术应用,2016,42(1):51-53,57.[3]潘玲娇,张自嘉.嵌入式16通道同步数据采集系统设计[J].仪表技术与传感器,2013(11):72-78.[4]张旭,亓学广,李世光,等.基于STM32电力数据采集系统的设计[J].电子测量技术,2010,33(11):90-93.[5]谢跃雷,晋良念,欧阳缮,等.一种基于FPGA 的超宽带雷达数字接收机[J].现代雷达,2014,36(1):62-65.[6]李保刚,马登武.FPGA 在多路采集系统中的应用研究[J].计算机测量与控制,2012,20(4):1138-1141.[7]祝宇,王连明,艾淑平.基于Nios II 的多路高速数据采集存储系统的实现[J].吉林大学学报(信息科学版),2015,33(6):632-636.[8]孟令军,张国兵,王宏涛,等.基于FPGA 的LVDS 高速差分接口应用[J].化工自动化及仪表,2010,37(5):94-96.[9]张雪莲,沈三民,武晋波.基于PCI 接口及LVDS 的高速数据传输系统设计[J].计算机测量与控制,2013,21(10):2848-2850.[10]李飞飞,苏延川,王鹏.基于DSP 的FPGA 配置方法研究与实现[J].现代电子技术,2011,34(24):60-62.[11]付强,王春平,张学军.某型装备自动测试系统中FPGA配置方案设计[J].火力与指挥控制,2011,36(10):196-198.Design of integrated radar video acquisition system and its implementationLI Jiawei,ZHANG Jinlin,LI Yuehua,FENG Kun(Air Force Early Warning Academy,Wuhan 430019,China)Abstract :Concerning for the channel number being more,the data rate high,the hardware platform of diversification and other problems existing in the radar video signal acquisition,this paper designs and implements a reconfigurable integrated radar video acquisition system.Based on using the FPGA,the system realizes the unified access and integrated acquisition of mutually independent multi-channel radar video and instructions signals in one radar system,and sends the collected data unifiedly to the digital transceiver platform through the LVDS interface,and its output data rate reaches 7.2Gb/s.Meanwhile,by taking advantage of the reconfiguration of FPGA,this paper designs also a reconstructor using the ARM as the main control core,and implements the smooth compatibility of various types of radar video signal acquisition system without varying the hardware platform.Test results show the data collected by this system has a higher accuracy,the system has a better platform augmentability,thus providing a unified platform for the integrated acquisition of various video signals of the multiple types of radar systems.Key words :integrated radar video acquisition ;data acquisition ;FPGA ;reconfiguration controller ;radar vid-eosignal(上接第247页)Analysis of integrated monitoring system for ATCradar station and its designZHANG Heng,XU Tingxin,LIN Qiang,ZHANG Kun(Air Force Early Warning Academy,Wuhan 430019,China)Abstract :In order to improve the support capability of ATC radar,this paper puts forward a design scheme for the integrated monitoring system of ATC radar station.First of all,this paper carries on a demand analysis of the monitor system of ATC radar station,and proposes a concrete design scheme in terms of such three aspects as the system task and functions,system architecture and software design,and then presents the implementation of the part of the monitoring units,and finally,performs the pilot trial of the system designed.The trial rests show this system can be of high security,practical use and reliability.Key words :ATC radar ;integrated ;monitoringsystem。
浅谈S模式增强型监视的应用
浅谈S模式增强型监视的应用近年来民航飞行流量高速增长,各种干扰问题日益增加,常规的A/C模式二次雷达已无法满足空管需求,更为先进的S模式二次雷达应运而生。
S模式单脉冲二次雷达(MODE S MSSR),具有地—空和空—地数据链传输功能,能够向空中交通管制自动化系统提供更为详细的目标信息。
通过其重点改进的增强型监视功能,点名询问,有效避免同步及异步干扰,显著改善了空中交通管制员的大流量航班处置能力。
1 S模式简介S模式中的字母S是英文单词选择(SELECT)的缩写,S模式雷达通过每架飞机全球唯一的24位地址码,进行离散寻址,即通俗的点名询问,而不是在天线询问波瓣内采用大范围广播的方法来向飞机请求应答。
被请求应答的飞机只有当询问波束中的24位地址码与自身完全相同时,才会进行应答。
此外,S模式的点名询问顺序是预先排列好的,以便尽量降低飞机在雷达的扫描周期内的应答频率,通过这种方法可以大幅降低雷达发生同步串扰和异步干扰的概率。
而如果对某一架飞机在当前询问周期中所发出的询问请求未能收到回答,则可在本次波束扫描过后,再次安排对该架飞机的询问。
S模式雷达除了选择询问以外,另一重要功能为增强型监视功能,即地空数据链功能,在S 模式雷达地面站与飞机应答机建立选择询问的关系后,可以通过S模式地空数据链功能在雷达地面站与飞机之间发送和接收雷达数据包,使地面站获取到飞机更加丰富的信息。
1.1基础监视功能S模式单脉冲二次雷达在功能上完全兼容常规的A/C模式二次雷达,因此S模式二次雷达既可以获取S模式机载应答机的回答,也可以获取A/C模式机载应答机的回答。
在常规A/C模式的工作方式下,S模式二次雷达通过广播方式,向雷达波瓣作用范围内的所有飞机分别发送3/A模式和C模式询问脉冲,接收到询问脉冲的所有飞机都将进行应答,雷达由此来获取飞机的识别码和高度码。
在S模式的工作方式下,雷达的询问程序分为了两个部分,分别是全呼询问(ALL CALL)和选择性询问(ROLL CALL),这两套询问程序在雷达工作过程中周期性的交替进行。
机载SAR/MTI雷达系统设计技术研究
机载SAR/MTI雷达系统设计技术研究SAR/MTI雷达将SAR雷达的全天时、全天候的观测特性和MTI体制雷达对地面目标良好的跟踪性能结合,具备优越的战场感知能力,已成为各国研究的热点。
文章对基于二维有源相控阵体制SAR/MTI雷达系统设计进行了研究,论述了系统组成及特点,进行了雷达体制与工作模式设计,并给出了试验结果。
标签:二维有源相控阵天线;实时处理;机载;SAR;GMTI;AMTI1 概述合成孔径雷达作为一种主动式微波成像系统,已广泛应用于军事侦察、环境监测、土地资源管理等军事及国民经济领域[1]。
合成孔径雷达成像具有全天时、全天候、远距离和宽测绘带等优点,可以大大提高雷达的信息获取能力;同时在战场侦察方面,合成孔径雷达地面动目标检测功能可以侦察和监视敌方的战略设备和部队的运动情况,从而大大提高了成像雷达的战场感知能力。
在现代战场监视雷达的研制中,将SAR雷达的全天时、全天候的观测特性和MTI体制雷达对地面目标和低空目标良好的跟踪性能结合,研制SAR/MTI模式雷达成为各国研究的热点[3-4]。
国外最早开发的机载SAR/MTI雷达是美国的JSTARS系统,其作战效能在近几次局部战争中得到了充分验证和发挥。
此外,类似的系统还有英国的ASTOR、美国的Global Hawk(“全球鹰”无人机)及Predator(“捕食者”无人机)等。
国内的机载SAR雷达系统经过二十多年的发展已经具备了坚实的基础,我们已经成功开发了机载SAR/MTI雷达样机,并成功进行了机载校飞试验,实现了多模战场监视功能。
文章对基于二维有源相控阵体制SAR/MTI雷达系统设计进行了研究,论述了系统组成及特点,进行了雷达工作模式设计,并给出了试验结果。
2 系统组成及特点机载SAR/MTI雷达系统由机载SAR/MTI雷达、数据链及地面站3个部分组成。
机载雷达完成多模式战场侦察监视功能,实时获取战场目标情报信息(包含固定目标图像情报和运动目标点迹、航迹情报),并通过数据链实时下传到地面站进行显示及分发。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
特点及不足 , 在 摘 要 分析和讨论了现有几种空间监视雷达的工作模式 、 提出利用波束驻留模式进行空间目标探测的思想 , 从雷达检测性能方面对 此基础上 , 比了该模式与传统波束扫描模式的潜在 探 测 能 力 , 得出了驻留模式在远距离目标探 通过理论分析和仿真实 测方面较传统波束扫描相控阵雷达更 具 优 势 的 结 论 。 最 后 , 验对比了 2 种模式的检测性能 。 关 键 词 空间监视雷达 ; 波束驻留模式 ; 波束扫描模式 ; 远距离目标探测 中图分类号 TN 9 5 文献标志码 A ( ) 文 章 编 号 2 0 9 5 3 8 2 8 2 0 1 3 0 3 0 0 8 6 0 5 - - - / DO I 0. 3 7 8 3 . i s s n. 2 0 9 5 3 8 2 8. 2 0 1 3. 0 3. 0 2 0 1 - j
4] 。 通常 , 搜索 、 跟踪空间目标 [ 空间目标监视相控
、 主发射机形成南北 方 向 波 束 宽 度 为 0. 东西 0 2 5 ° 方 向 近 似 全 向 的 扇 形 波 束, 主站天线总增益为 副站负责对低轨目标补盲搜索 。 4 0d B, 接收阵通过干 涉 检 测 目 标 , 测量目标的俯仰 角和多普勒值 。 如果有 2 个接收站测量到目标多 普 勒 值, 系 统 就 能 据 此 实 现 目 标 定 位 和 初 定 轨。 电子篱笆目前仍是美国空间监视系统中最为重要 所探测的新 目 标 占 全 系 统 的 7 的系统之一 , 0% 以 上 。 由于采用的 是 多 基 地 雷 达 工 作 模 式 , 该系统 存在以下几个问题 : )系统庞大 , 维护成本高 。 为获得南北方 向 1 电子篱笆在南北方向形成极窄的波束 , 的高增益 , 其主 发 射 站 天 线 长 约 3. 接收站天线长约 2k m, 建造和维护成本都 1. 8 5k m。 如此庞 大 的 系 统 , 很高 。 )探测时间短 , 定轨精度低 。 多普勒速度 分 2 辨率与探测时间成正比 , 由于南北向波束极窄 , 探 测时间较短导致雷达多普勒分辨率受限 。 在仅有 目标速度测量精度进一 单站测量数据的 条 件 下 , 步降低 , 无法单次定位 。 )弱目标探测能力不足 。 系统工作 在 VHF 3 ( ) , 频段 中心频率 2 其波长为 1. 远 1 7 MH z 3 8 m, 大于大部分空间 碎 片 的 尺 寸 , 体积较小的目标处 于雷达的瑞利区 , 不利于小尺寸目标探测 。 ” 模式 1. 2 法国 “ G R A V E S 为打破对美国 空 间 监 视 数 据 的 依 赖 , 法国发 — —G 展了 独 立 的 空 间 目 标 探 测 系 统 — R AV E S。 中心频率 G R AV E S 是 一 部 工 作 在 VHF 波 段 ( ) 的连续波相控阵双基地雷达 , 其发射站 1 4 3 MH z 位于第戎 , 接收站位于 3 8 0k m 以 外 的 普 罗 旺 斯。 发射站采用 8 个相控天线阵 , 每个发射阵负责 4 5 ° 的方位空域 , 通过 发 射 波 束 的 扫 描 接 成 一 个 圆 锥
, r i n c i A b s t r a c t h e o e r a t i o n m o d e s o f e x i s t i n s a c e s u r v e i l l a n c e r a d a r a r e a n a l z e d a n d t h e T p p g p y - l e s r o o s e d a n d s h o r t c o m i n s a r e d i s c u s s e d .A n e w i d e a b a s e d o n b e a m r e s i d i n m o d e i s a n d a c o n p p p g g - , , e r c l u s i o n i s d r a w n w h i c h i n d i c a t e s t h a t c o m a r e s t o t r a d i t i o n a l b e a m s c a n n i n m o d e t h e d e t e c t i o n p - p g , o t e n t i a l . F i n a l l f o r m a n c e o f r e s i d i n m o d e i s m u c h m o r e c o m e t i t i v e i n f a r r a n e t a r e t d e t e c t i o n p - g g p y g t h e f e a s i b i l i t o f t h e m o d e i s d i s c u s s e d a n d d e t e c t i o n o f t h e s e t w o m o d e s i s c o m a r e d e r f o r m a n c e y p p a c a d e m i c a n a l s i s a n d s i m u l a t i o n. t h r o u h y g ; ; ; K e w o r d s a c e s u r v e i l l a n c e r a d a r b e a m r e s i d e s m o d e b e a m s c a n n i n m o d e f a r r a n e t a r e t s p g g g y - d e t e c t i o n
S t u d o f O e r a t i o n M o d e o f S a c e S u r v e i l l a n c e R a d a r y p p
1 2 , XU C a n I Z h i L
( ,A , ; 1. C o m a n o f P o s t r a d u a t e M a n a e m e n t c a d e m o f E u i m e n t B e i i n 1 0 1 4 1 6, C h i n a p y g g y q p j g ,A , ) 2. D e a r t m e n t o f S a c e C o mm a n d c a d e m o f E u i m e n t B e i i n 1 0 1 4 1 6, C h i n a p p y q p j g
3] 。该系统基于“ 形的监视屏 [ 测量多普勒及角度
阵雷达通 过 波 束 电 控 扫 描 在 空 间 形 成 一 个 虚 的 “ , 警戒屏 ” 实现对空间目标的拦截捕获 。 相控阵雷达执行多任务基本是在时间上调度 完成的 , 可理解 为 “ 分 时” 模 式。 为 保 证 对 空 间 目 雷达需要在大范围内维持搜索警 标的可靠捕获 , 这将极大地占用雷达资源 , 降低跟踪能力 。 戒屏 , 空间监视相控 阵 雷 达 通 常 是 单 脉 冲 体 制 , 为 保证 无 模 糊 测 距 , 脉冲重复时间( r e e t i u l s e p p - , 在几十毫秒量级 , 为保证在目标 t i o n s t i m e P R T) 穿越警戒屏期间 雷 达 能 够 捕 获 目 标 , 要求雷达的 扫描周 期 不 能 过 长 。 这 使 波 位 驻 留 时 间 非 常 有 限制了相控阵雷达的探测能力 。 限, 1. 4 美国未来空间篱笆模式 2 0 0 9年 2 月 发 生 的 美 俄 卫 星 撞 击 事 件 使 美 军认识到保护空 间 目 标 , 尤其是美国重要卫星安 空间 全的极端重 要 性 。 作 为 电 子 篱 笆 的 替 代 品 , 篱笆 ( 项目被赋予了最高的优先 S a c e F e n c e) p
2 0 1 3年 6月 第2 4卷 第3期
装 备 学 院 学 报 J o u r n a l o f A c a d e m o f E u i m e n t y q p
0 1 3 J u n e 2 V o l . 2 4 N o . 3
空间监视雷达工作模式研究
2 徐 灿1, 李 智 ( ) 北京 1 北京 1 1.装备学院 研究生管理大队 , 0 1 4 1 6; 0 1 4 1 6 2.装备学院 航天指挥系 ,
0 1 2 0 9 2 6 收稿日期 2 - - 基金项目 新世纪优秀人才支持计划
1 地基空间目标监视雷达的主要工 作模式
1. 1 美国电子篱笆模式 美国电子篱笆原名海 军 空 间 监 视 雷 达 ( n a v a l , , s u r v e i l l a n c e r a d a r NAV S P A S UR) 2 0 1 0 s a c e p 年 由 美 国 空 军 接 管, 也称为空军空间监视系统 ( 。 a i r f o r c e s a c e s u r v e i l l a n c e s s t e m, A F S S S) p y 系统包括位于北纬 3 的3个发射阵和6个接收 3 ° 阵 。 主站能够探测到轨道高度为 2 4 0 0 0k m 的目 ( ) 标, 对R 为0. C S r a d a r c r o s s s e c t i o n 1m2 的目标
[] 探测距离约为 3 6 8 7k m 2 。 位于 K i c k a o o标的能力有限 。 )检测 目 标 的 实 时 性 不 高 。 受 国 土 纬 度 的 2 限制 , 该系 统 很 难 有 效 观 测 轨 道 倾 角 小 于 4 的 0 ° 空间目标 , 同时法国经度跨度小 , 无法形成大范围 的空域监视屏 。G R AV E S 系统仅能 实 现 2 4h 更 新一次目标 , 时效性不强 。 1. 3 窄波束扫描相控阵雷达模式 相控阵雷达可 以 形 成 大 的 功 率 孔 径 积 , 且可 因此 , 相控阵雷达被广泛用于 同时跟踪多个目标 ,
空间安全形势也 随着航天活 动 的 日 益 频 繁 , 。 日趋严峻 截 止 到 2 0 1 2 年 5 月, NA S A 编目的 而估计 1 0c m 以 上 的 空 间 目 标 已 达 1. 6 万 个, [ ] 1c m 以上的目标数量已达到 2 0万 1 。我国计划 在“ 十二五 ” 期间实现 “ 百箭百星 ” 的发展目标并于 空间目标监视的任务十 2 0 2 0 年前后建成空间站 , 分艰巨 。 对空间目标的跟踪 、 编目 、 识别的前提是能够 有效检测目标 , 地基相控阵雷达受自然条件的影 响较小 , 且具有波束灵活可控 、 跟踪多目标能力强 等特点 , 是目前空间目标监视的主要装备 。