第二届全国大学生“飞思卡尔”杯
智能汽车_百度百科

清 华 V 型 。
此外,西安交通大学搭建了Spingrobot智能车实验平台,并于2005年10月成功完成在敦煌“新丝绸之路”活动中的演示。同济大学2006年研发了一辆无人驾驶清洁能源电动游览车,最高时速为50km/h,可应用于人们观光旅游。吉林大学和中科院沈阳自动化所在无人驾驶智能车方面也研究较早,取得不少成果。
开放分类:
汽车 , 智能车
我具体问题(尤其在法律、医学等领域),建议您咨询相关领域专业人士。
本词条对我有帮助
添加到搜藏 分享到:
合作编辑者
流行碰 , echo_wxf , hanslong , 百科ROBOT , youngsunking , keeshaw
现在购买长城腾翼c30汽车,即可享受惠民补贴3000元,月销1万辆,掀..
埃里森增氧型汽车节油 国..
最新推出增氧型汽车节油,节省燃油6-15%,提升动力10%,减少尾气车是一种正在研制的新型高科技汽车,这种汽车不需要人去驾驶,人只舒服地坐在车上享受这高科技的成果就行了。因为这种汽车上装有相当于汽车的“眼睛”、“大脑”和“脚”的电视摄像机、电子计算机和自动操纵系统之类的装置,这些装置都装有非常复杂的电脑程序,所以这种汽车能和人一样会“思考”、“判断”、“行走”,可以自动启动、加速、刹车,可以自动绕过地面障碍物。在复杂多变的情况下,它的“大脑”能随机应变,自动选择最佳方案,指挥汽车帮助 设置
大学生可以参加地竞赛汇总情况
大学生可以参加的竞赛文案大全文案大全文案大全注:加黑赛事为教育部资助的九大赛事,上面共有八个,还有一个是全国大学生英语竞赛。
文案大全文案大全重庆大学大学生课外科技创新实践活动一览表文案大全文案大全注:1 含(*)赛事为教育部资助的九大赛事,上面共有 6个,还有“挑战杯”大学生课外学术科技作品竞赛、中国MEMS传感器应用大赛、全国大学生物流设计大赛。
2 加黑赛事为在机械学子关注较多、有广泛参与度的比赛。
重点项目竞赛的介绍及获奖情况主要分为三类,一.实践类1.国家大学生创新训练项目该项目隶属于国家大学生创新创业训练计划(原名“国家大学生创新性实验计划”)。
国家大学生创新训练项目是教育部为推动创新性人才培养工作的一项重要举措,是国家直接面向大学生组织开展的自主性、探索性、过程性、协作性和学科性的创新训练项目。
该计划项目的开展旨在探索并建立以问题和课题为核心的教学模式,倡导以本科学生为主体的创新性实验教学改革,调动学生的主动性、积极性和创造性,激发学生的创新思维和创新意识,掌握分析问题、解决问题的方法,培养学生从事科学研究和创造发明的素质,提高其创新实践的能力。
文案大全学生以个人或团队形式开展项目申请,每队人数最多不超过3人。
项目申报对象主要为学习成绩优良(或个别有特长)、学有余力、项目开展期间为2、3年级(五年制本科为2-4年级)的在校本科学生,申报项目的学生必须符合以下条件之一:(1)、弘深学院学生;(2)、课程成绩平均分值≥ 70 ,平均学年重修课程数不得多于 1 门,学有余力的学生;(3)、不满足1、2条中任何一条,但个别有特长的学生,经审查批准后可参加申报。
目前我校已连续开展六届,立项项目近400项,参与学生1100余人。
2.大学生科研训练计划“重庆大学大学生科研训练计划”( students research training program ,简称 SRTP ),是学校面向全校本科生开展的一项创新教育计划,是学校创新体系的重要组成部分。
飞思卡尔杯全国大学生智能车邀请赛比赛规则-高等教育处
2018年四川省大学生智能汽车竞赛竞速比赛规则与赛场纪律四川省大学生智能汽车竞赛是面向四川省大学生的一种具有探索性工程实践活动,旨在促进四川省高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,提升四川省属高校参加全国大学生智能汽车竞赛的获奖名次和获奖比例,展示四川省内高校教育质量工程建设和教育教学改革的丰硕成果。
参赛选手须使用竞赛组委会统一指定的竞赛车模套件,采用8位、16位、32位微控制器作为核心控制单元(建议优先采用飞思卡尔半导体公司MCU),自主构思控制方案进行系统设计,包括传感器信号采集处理、电机驱动、转向舵机控制以及控制算法软件开发等,完成智能车工程制作及调试,于指定日期与地点参加场地比赛。
参赛队伍的名次(成绩)由赛车现场成功完成赛道比赛时间来决定。
总结第十二届比赛规则与经验,为了兼顾现在比赛规模的要求,同时避免同组别内出现克隆车的情况,能够便于参赛学校在有限的场地内使用兼容的赛道完成比赛准备,竞速比赛将按照五个类别进行设置分别为:1. 四轮光电组2. 两轮直立组3. 三轮电磁组:4. 无线节能组:5. 双车汇车组。
竞赛组委会制定如下比赛规则适用于本次比赛,在实际可操作性基础上力求公正与公平。
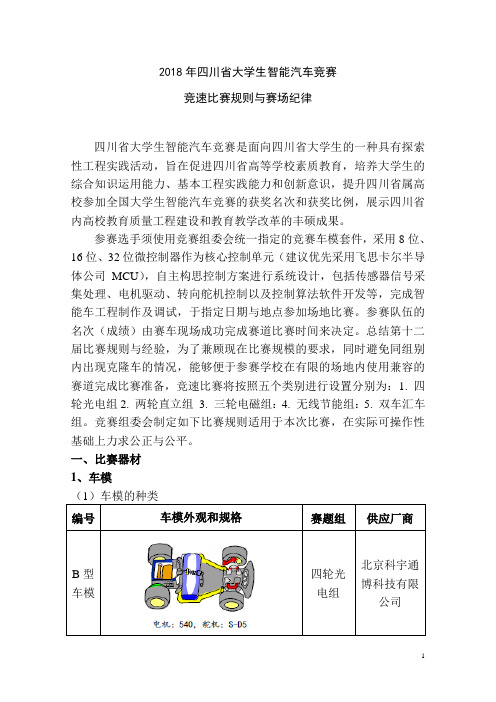
一、比赛器材1、车模说明1:东莞博思公司对于C,D 两种车型都进行了改进增强。
在本届比赛中双车会车组只允许使用新版C车模。
旧版C车模只能够在节能组中使用。
新旧D车模可以同时使用。
说明2:北京科宇通博科技有限公司对于 B 车模进行了改进。
在本届比赛中,允许新旧版B车模同时使用。
2、电子元器件(1)微控制器采用恩智浦公司的8 位、16 位、32 位系列微控制器作为车模中唯一可编程控制器件。
在三轮电磁组,二轮直立组以及无线节能组只允许使用恩智浦公司的KEA 系列的MCU,其它组别对于单片机系列不限制。
如果无线节能组使用了摄像头传感器进行赛道检测,则可以使用KEA 系列之外的其它NXP 公司MCU。
全国大学生飞思卡尔杯智能汽车竞赛简介
全国大学生“飞思卡尔”杯智能汽车竞赛简介
全国大学生“飞思卡尔”杯智能汽车竞赛是教育部高等学校自动化专业教学指导分委员会主办的全国性的大学生科技竞赛活动。
该竞赛是在规定的模型汽车平台上,使用飞思卡尔半导体公司的8位、16位、32位微控制器作为核心控制模块,通过增加道路传感器、电机驱动电路以及编写相应软件,制作一部能够自主识别道路的模型汽车,按照规定路线自动行进,以完成时间最短者为优胜。
该竞赛涵盖了自动控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科知识,旨在促进高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识。
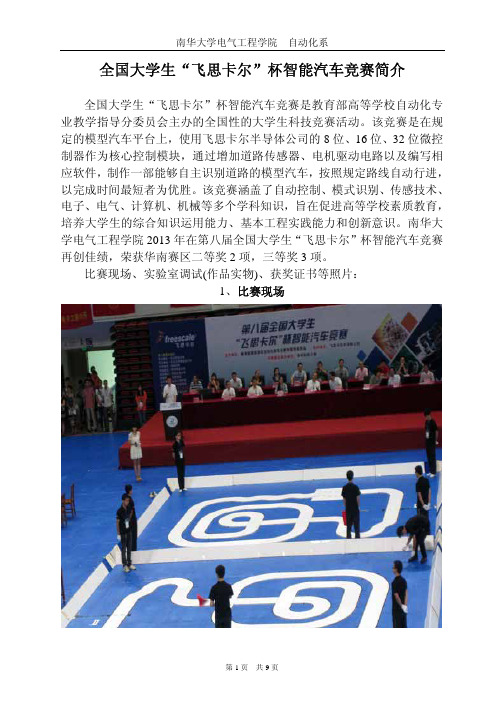
南华大学电气工程学院2013年在第八届全国大学生“飞思卡尔”杯智能汽车竞赛再创佳绩,荣获华南赛区二等奖2项,三等奖3项。
比赛现场、实验室调试(作品实物)、获奖证书等照片:
1、比赛现场
2、实验室调试
3、部分获奖证书。
飞思卡尔杯全国大学生智能汽车邀请赛北理风行者车队技术报告
速度检测模块由 S12 的增强型捕捉计数模块、传感器和外围电路组成,通过 检测赛车的实时车速为赛车的车速控制提供控制量。
2.3 智能车系统软件结构设计
如果说系统硬件对于智能车来说是它的骨架和躯体,那么软件算法就是它的 思想。软件算法的优劣直接体现了智能车辆的“智能”高低。所以软件系统对于智 能车来说至关重要。 首先,赛车系统通过路径识别模块获取前方黑色引导线的信息, 同时通过速度检测模块实时获取赛车的速度。 利用连续路径识别算法求得赛车与黑 线位置的偏差,接着采用 P 方法对舵机进行控制,根据检测到的实时车速,结合模 糊控制策略对赛车速度进行恰当的控制调整,使赛车在符合比赛规则情况下沿赛道
50cm 316mm 172m 18/76
图 3.1 模型车的底盘结构
3.2 智能车运动学状态方程
在只考虑车辆的平面运动情况下,当转向时,车辆只做平面运动及平面旋转 运动,如图 3.2、3.3 所示。
Vf Vr
w
L
图 3.2 小车转向示意图
R
L
图 3.3 转向平面图
2 w
Vr
由角速度的定义可知
TR
以智能汽车为研究背景的科技创意性制作,是一种具有探索性的工程实践活 动,其本质也是人类创造有用人工物的一种训练性实践,其过程属性是综合,而结 果属性很可能是创造。通过竞赛,参赛的同学们培养了对已学过的基础与专业理论 知识与实验的综合运用的能力;带着背景对象中的各种新问题,学习控制、模式识 别、传感技术、电子、电气、计算机、机械等多个学科新知识,包括来自不同学科 背景大学生的相互学习,逐渐学会了在学科交叉、集成基础上的综合运用;若是以 实用为目的,还必须考虑考虑可靠性、寿命、外观工业设计、集成科学与非科学, 在具体约束条件下融合形成整体的综合运用。这样的训练是很有意义的。
飞思卡尔杯
飞思卡尔杯简介飞思卡尔杯是由飞思卡尔公司主办的一项面向全球大学生的智能车竞赛。
目的是鼓励青年学子在智能车领域的创新与研发,并提供一个展示自己才华的舞台。
自2002年举办以来,飞思卡尔杯已经成为全球大学生智能车领域最高规格的赛事之一。
赛事组别飞思卡尔杯共设立了三个赛事组别,分别是智能车挑战赛、自动驾驶车辆挑战赛和智能交通系统挑战赛。
1.智能车挑战赛:参赛队伍需要设计并制作自己的智能小车,然后在指定的赛道上进行比赛。
比赛中,智能小车需要通过各种感知、决策和控制技术来完成特定的任务,如跟随线路、避障、停车等。
这个组别要求参赛者综合运用多个技术领域知识,是最具挑战性的组别之一。
2.自动驾驶车辆挑战赛:参赛队伍需要设计并制作能够完全自主驾驶的车辆,车辆需要在没有人为干预的情况下完成指定道路上的驾驶任务。
这个组别要求参赛者在感知、决策和控制等多个核心技术上有较高的研究水平。
3.智能交通系统挑战赛:参赛队伍需要设计并搭建一个智能交通系统,通过各种感知和智能决策技术来提高交通系统的效率和安全性。
这个组别注重对交通系统整体的优化和智能化。
创新与奖项飞思卡尔杯鼓励参赛队伍在比赛中展示创新和技术突破。
每年的比赛都有一些新的技术和设计需要参赛队伍去尝试和探索。
除了总冠军外,比赛还设置了多个特色奖项,如最佳技术创新奖、最佳设计奖、最佳工程奖等,来对参赛队伍的创新能力给予认可和奖励。
飞思卡尔公司的支持飞思卡尔公司作为飞思卡尔杯的主办方,提供了全球大学生的智能车竞赛所需要的技术支持和资源。
飞思卡尔公司拥有丰富的技术经验和产品线,为参赛队伍提供了开发套件、模块、学习资料等。
此外,飞思卡尔公司还提供了专业的技术培训和咨询服务,帮助参赛队伍更好地进行项目开发和实践。
结语飞思卡尔杯是一个培养年轻人创新意识和科技实践能力的平台,也是一个展示各类智能车技术和研究成果的舞台。
通过参与飞思卡尔杯的比赛,学生们能够拓宽视野,提升技术实力,并与其他志同道合的年轻人交流共享。
第二届“飞思卡尔”杯全国大学生智能汽车竞赛公告

知识产权
所有参赛 队伍必须与大赛各分赛 区组委会签订参赛
承诺协议( 具体 内容参见协议文本) 参 赛作品的著作权 ,
归属参 赛者本人 , 飞思卡 尔半导体 公司和比赛秘书处可
以在相 关主页上收录并公开获奖作 品的设计 方案 技术 报 告及参赛模型车 的视频 图像资料。
第 一赛区 :东北 大学 (1 0 4 东北大学 1 7信箱 1 0 ) 0 2
・ 资格评 审阶段 2 0 0 7年 1 2 月 0日 至 2 0 年 1 07 月
3 日: 0
・
签订 比赛协议 . 发放开发工具 以及购买车模套件
阶段 :2 0 0 7年 2月 1日至 2 0 0 7年 2月 2 8日; ・ 分赛区举办联谊会议 :2 0 0 7年3月初 ; ” 第二届 — 思卡尔 ” 杯全国 大学生智能汽车邀请赛 ” 专栏 , 实时刊登
网站暇务
竞赛 网站 、 ^Ⅳs r a .utig u .d .n ^ n. n mat r . n h ae uc ,竞 c a s 赛秘书处通过 网站提供竞赛 活动信息服务 。
报告 。
识 别路 线的智能车 在专 门设计 的跑道上 自动识别道路
行驶。
・ 综合赛车单 圈最 短时间 、 技术报告质量等项 的分
数进行评 奖。 ・ 国按 照地域划分为五个分赛 区。 全 各参 赛队伍首 先在各分赛 区进行预 赛 .各分 赛 区的优 胜队将参 加决 赛。 由第 二届大赛 组委会根据各赛区报名参赛 队数确定 各分赛 区参加决赛 的优 胜队伍数 目。
学校所有 .参赛队伍使 用它参加 比赛 。
维普资讯
报 名办法
参 赛 队 通 过竞 赛 网站 WWW. Smar C . t ar aU. tig u .d .n报 名。参赛 队伍资格确认后 ,从网站 sn h ae uc 下载并填 写 ” 参赛协 议” ,连 同学校推 荐信 函一并寄往 各分赛 区承办学校。
大学生课外学术科技竞赛项目排行榜
大学生课外学术科技竞赛项目排行榜S类:1、世界大学生超级计算机竞赛(ASC)2、国际水中机器人大赛3、国际(美国)大学生数学建模竞赛4、ACM国际大学生程序设计竞赛5、飞思卡尔杯国际智能车比赛6、中国“互联网+”大学生创新创业大赛A类1、全国大学生“飞思卡尔”杯智能汽车竞赛2、中国大学生物联网创新创业大赛(原美新杯中国MEMS传感器应用大赛)3、全国大学生数学建模竞赛4、全国大学生节能减排社会实践与科技竞赛5、全国高校学生DV作品大赛6、全国大学生结构设计竞赛7、全国大学生化学实验竞赛8、全国大学生软件创新大赛9、全国大学生工程训练综合能力竞赛10、全国大学生电子设计竞赛11、全国大学生电子商务创新、创意及创业挑战赛12、全国大学生“西门子杯”工业自动化挑战赛(原全国大学生控制仿真挑战赛)13、全国大学生机械创新设计大赛14、全国大学生物理实验竞赛15、AUTODESK REVIT杯全国大学生可持续建筑设计竞赛16、全国大学生物流设计大赛17、全国大学生广告艺术大赛18、“挑战杯”课外科技作品竞赛19、“创青春”全国大学生创业大赛20、中国机器人大赛暨 RoboCup公开赛21、全国普通高校信息技术创新与实践活动(高校NOC活动)22、“未来之星”全国大学生视觉设计大赛23、全国大学生公益广告作品征集活动24、全国大学生艺术展演活动25、“中国软件杯”大学生软件设计大赛B类1、全国周培源大学生力学竞赛2、全国虚拟仪器设计大赛3、ACM全国大学生程序设计大赛4、中国教育机器人大赛(原中国智能机器人大赛)5、“博创杯”模块化机器人设计大赛6、全国大学生英语竞赛7、全国大学生数学竞赛8、全国三维数字化创新设计大赛9、全国大学生焊接创新大赛10、全国大学生过程装备实践与创新大赛11、全国大学生基础力学实验竞赛12、全国高校GIS技能大赛13、中国大学生铸造工艺设计大赛14、全国大学生水利创新设计大赛15、ThinkQuest International CompetitionThinkQuest projects digital Media Application Development16、全国大学生物联网创新应用设计大赛17、全国ITAT教育工程就业技能大赛18、Honda中国节能竞技大赛19、瑞萨超级MCU模型车大赛20、全国“电脑鼠走迷宫”竞赛21、“长城脚下﹒建筑艺术博览园”全国大学生设计比赛22、外研社杯英语演讲大赛23、中译杯口译大赛24、山西省大学生化学实验竞赛25、“昆山杯”全国优秀大学生创业团队大赛26、环艺学年奖27、杭州大学生创业大赛28、“兴晋挑战杯”课外科技作品大赛29、“创青春”山西省大学生创业计划大赛30、全国机器人运动会31、全国高校健身气功比赛32、人工环境工程学科奖学金33、三一(中国)工程机械工业设计大赛34、“中国电机工程学会杯”全国大学生电工数学建模竞赛35、“蓝桥杯”全国软件和信息技术专业人才大赛(原“蓝桥杯”全国软件专业人才设计与创业大赛)36、全国大学生混凝土设计大赛37、“则泰杯”全国高校测绘学科大学生科技论文竞赛38、国际空中机器人大赛39、全国大学生职业生涯规划大赛40、全国大学生纱线设计大赛41、中国(国际)传感器创新大赛42、山西省大中学生武术锦标赛43、全国大学生海洋知识竞赛44、全国大学生工业设计大赛45、全国大学生地质技能综合应用竞赛46、全国高等学校采矿工程专业学生实践作品大赛47、“越隆杯”中国高校纺织品(面料)设计大赛48、“汉帛奖”中国国际青年设计师时装作品大赛49、“为中国而设计”全国环境艺术类大赛50、中国之星设计艺术大奖51、全国旅游纪念品设计大赛52、中国国际面料设计大赛53、“蓝星杯”全国大学生建筑设计方案竞赛54、高校大学生金相制样比赛55、“霍普杯”国际大学生建筑设计竞赛56、全国高等院校计算机核心技能与信息素养大赛57、“华为杯”全国大学生智能设计竞赛58、山西省大中学生定向越野锦标赛59、华北五省(市、自治区)大学生人文知识竞赛60、华北五省(市、自治区)及港澳台大学生计算机应用大赛61、华北五省(市、自治区)大学生机器人大赛62、全国并行应用挑战赛(原全国教育科研并行应用程序优化大赛)63、中国制冷空调行业大学生科技竞赛64、全国大学生信息安全竞赛65、绿色建筑创意全国邀请赛66、“深圳杯”山西省大学生数学建模竞赛67、“中软卓越”杯全国大学生Android应用创意大赛68、全国大学生网络虚拟运营创业专项赛69、中国大学生方程式汽车大赛70、全国大学生绿色建筑课程设计竞赛71、山西省大学生机器人大赛72、全国高校物联网应用创新大赛73、中国大学生服务外包创新创业大赛74、“台达杯”两岸高校自动化设计大赛75、全国大学生物联网设计竞赛(TI杯)76、“学创杯”全国大学生创业综合模拟大赛77、全国高等学校大学生测绘技能竞赛78、科研类全国航空航天模型锦标赛79、全国海洋航行器设计与制作大赛80、山西省大学生电子设计竞赛81、SuperMap杯全国高校GIS大赛82、“21世纪杯”全国英语演讲比赛83、山西省大学生艺术展演活动84、“晋商杯”大学生创业大赛C类1、省城青年创业大赛2、中英创业大赛3、山西省健身气功交流赛4、太原市数学建模竞赛(原省城数学建模联赛)5、全国高校环保科技创意设计大赛6、中国移动Mobil Market 百万青年创业计划7、中国国际动漫节8、全国大学生传统运动会9、靳埭强设计奖全球华人大学生设计比赛10、全国大学生海洋文化创意设计大赛11、全国大学生网络商务创新应用大赛12、“金蝶杯”全国大学生创业大赛13、冰心文学大赛14、“石狮杯”全国高校毕业生设计大赛15、全国高校市场营销大赛16、全国多媒体课件大赛17、浙江省大学生多媒体设计大赛18、全国数字媒体专业大学生科技作品竞赛19、全国商科院校商务谈判技能大赛(网络赛)20、全国信息技术应用水平大赛21、中国大学生计算机设计大赛22、中国商业地产摄影大展23、世界大学生影展24、千人摄影展25、山西省摄影艺术展26、国际商业艺术大展27、全国摄影艺术展28、平遥国际摄影大展29、中国凤凰国际摄影双年展30、中国武当(国际)摄影作品大展31、腾龙镜头杯中国大学生现代摄影大赛32、CCTV模特电视大赛33、中国模特之星大赛34、“临港”杯环球时尚超级模特大赛35、敦煌国际服饰模特艺术节国际职业模特大赛36、寰球旅游美皇后大赛37、国际新星模特大赛38、山西青年精英模特大赛39、地球小姐40、世界广告模特大赛41、“同至人杯”华谊新面孔影视模特大赛42、哥本哈跟皮草幸福代言人大赛43、世界模特小姐大赛44、世界旅游小姐45、中国职业模特大赛46、东方国际模特大赛47、新丝路模特大赛48、环球时尚模特大赛49、化妆造型大赛50、全国发型化妆大赛51、中国影视与时尚造型化妆大赛52、艾莱依CCTV2《时尚中国》“化妆造型”设计比赛53、巴黎世界杯发型化妆大赛54、“美丽盛典”中国国际时装周彩妆设计大赛55、上海东卫视——美丽学院化妆大赛56、“四美国际杯”发型化妆大赛57、天山南北新疆主题美术展58、全国中国画作品展59、风华三晋山西省青年美术展60、挖掘与发现全国油画艺术展61、山西省美术作品展62、山西省青年美展63、山西省油画写生展64、山西省水彩画展65、全国中国画作品展66、山西省工笔画作品展67、山西省写意画作品展68、山西省山水画作品展69、山西省人物画作品展70、全国漆画展71、传统工艺美术精品展72、中国佛山国际城市雕塑73、中国厦门漆画展74、湖北当代漆画展75、“从河姆渡走来”国际漆艺展76、广州漆画双年展77、扬州漆器精品展78、中日韩现代陶艺新世纪交流展79、陶瓷艺术类创新评比大奖赛80、中国当代陶瓷艺术大展81、陶雷青春石湾杯全国大学生陶艺大赛82、“恒福杯”茶具创新设计大赛83、“指南针计划”中国古代发明创造动漫大赛84、“动漫北京”首届民族原创动漫形象大赛85、山西省青少年预防艾滋病漫画动漫作品征集评选活动86、中国国际广告节“中国元素国际创意大赛”87、动画学院学院奖88、中国(北京)国际大学生动画节也称“白杨奖”89、山西省动漫艺术节90、全国数字艺术大赛91、“金麒麟”动漫艺术节92、wocom数字艺术大赛93、全国大学生原创动画大赛94、金龙奖原创动画漫画艺术大赛95、全国青年现代剪纸艺术设计大赛96、“火凤凰”杯第五届全国美术与艺术设计大赛97、中国高等院校设计艺术大赛98、台湾国际学生创意设计大赛99、中国家居设计大赛100、全国高校室内设计大赛101、“新人杯”全国青年学生室内设计竞赛102、“WA·总统家杯”建筑手绘设计大赛103、中国手绘艺术类大赛104、中国国际空间环境艺术类大赛105、名家具设计大赛106、山西省室内设计大赛107、“世界学生之星”国际包装设计奖108、中国包装“创意设计”大奖赛——“设计之星”奖109、山西省高校平面设计展110、白金创意全国大学生平面设计大赛111、全国大学生外贸单(纺织)职业能力大赛112、“金丽杉”杯羊绒时装设计大赛113、中国家居服创新设计大赛114、全国大学生“云蝠杯”纱线设计暨“金辉杯”面料设计大赛115、全国高职高专学生纺织面料检测技能大赛116、全国高职高专学生纺织面料设计大赛117、中国包装创意大赛118、中国休闲装设计精英大奖赛119、中国国际家用纺织品创意设计大赛120、高校平面设计暨“双合成”杯包装设计展121、全国高职高专学生服装制版与工艺技能大赛122、“威丝曼”中国针织时装设计大赛123、中国国际时装创意设计大赛124、“COCOON”中国国际女装设计师大奖赛125、中国(大朗)毛织服装设计大赛126、“CFW”中国服装设计师网络设计大赛127、中国国际大学生家纺织品设计大赛128、“从洛桑到北京”国际纤维艺术年展129、中国国际经编设计大赛130、全国设计艺术大奖赛131、中国当代纤维艺术展132、山西省职业装设计大赛133、中国时装设计新人奖134、中国国际院校师生设计大赛135、全国高校优秀毕业生服装设计大赛136、全国时装画艺术大赛137、中国家居服装设计大赛138、中国真维斯杯休闲装设计大赛139、大连杯中国青年时装设计大赛140、东华杯中国青年时装设计大赛141、全国高校服装表演专业优秀学生邀请赛142、北京电影学院学院奖143、银河创业训练营活动144、“阳光杯”高校行政管理专业辩论赛145、山西省“黄河律师杯”大学生模拟法庭大赛146、中国大学生广告艺术节学院奖147、联想平板笔记本Yoga创意营销大赛148、中国BIM技术交流暨优秀案例作品推荐会。
机械与动力工程学院2004-2008年学生科技竞赛活动获奖
全国大学生数学建模竞赛组委会 高等学校大学英语教学指导委员会 高等学校大学英语教学指导委员会 高等学校大学英语教学指导委员会 高等学校大学英语教学指导委员会 中国汽车工业协会 上海市造船工程学会 上汽教育杯上海市高校学生科技创新作品展示 评优活动组委会 上海市科学技术协会\上海市学生联合会 上海市科学技术协会\上海市学生联合会 上海市科学技术协会\上海市学生联合会
2006年 2006年 2005年 2005年 2005年 2005年 2005年 2005年 2005年 2005年 2005年 2005年 2004年 2004年 2004年 2004年 2004年 2004年 2004年
余姚市首届科技创业计划大赛 优秀奖 张江高科杯第四届上海市大学生创业计划大赛 银奖 第二届上海市大学生海洋科普知识竞赛 优秀组织奖 SolidWorks三维设计大奖赛 二等奖 SolidWorks三维设计大奖赛 三等奖 第九届“挑战杯”全国大学生课外学术科技作品竞赛 二等奖 第九届“挑战杯”全国大学生课外学术科技作品竞赛 三等奖 全国“飞向未来---太空探索”科技竞赛 第八名 全国大学生足球机器人比赛中型组2:2 冠军 上海市造船工程学会海军创意大赛 一等奖 上海市造船工程学会论文交流会 二等奖(2项) 上海市造船工程学会论文交流会 三等奖(3项) 世界工程师大会联展、论坛未来工程师联展 二等奖 世界工程师大会联展、论坛未来工程师联展 三等奖 世界工程师大会联展、论坛未来工程师论坛 二等奖
“陈嘉庚”杯上海市青少年创造发明奖(1项)
水平竞赛、省市级 上海市造船工程学会 水平竞赛、省市级 上海市造船工程学会 上汽教育杯上海市高校学生科技创新作品展示 科技竞赛、省市级 评优活动组委会 上汽教育杯上海市高校学生科技创新作品展示 科技竞赛、省市级 评优活动组委会 上汽教育杯上海市高校学生科技创新作品展示 科技竞赛、省市级 评优活动组委会 共青团上海市委员会\上海市科学技术协会\上 科技竞赛、省市级 海市学生联合会 科技竞赛、国际级 GM\EDS\SUN\UGS 科技竞赛、国际级 GM\EDS\SUN\UGS 科技竞赛、国际级 GM\EDS\SUN\UGS 共青团中央、科技部、教育部、天津市人民政 科技竞赛、国家级 府 科技竞赛、国家级 科技竞赛、国家级 水平竞赛、国家级 水平竞赛、国家级 科技竞赛、国家级 科技竞赛、国家级 评优创先、国家级 评优创先、省市级 评优创先、省市级 评优创先、省市级 教育部高等学校自动化专业教学指导分委员会 中国自动化学会\科技部高技术研究发展中心 高等学校大学英语教学指导委员会 高等学校大学英语教学指导委员会 中国创造学会 中国创造学会 共青团中央委员会 共青团上海市委员会 共青团上海市委员会 上海市人民政府 共青团上海市委员会\上海市科学技术协会\上 科技竞赛、省市级 海市学生联合会
飞思卡尔杯B型车模机械部件的改进探讨
t e c a ss t e u e t i r to a s d b o ots o k b o b r ;i r vn h t blt n h h s i o r d c he v b a in c u e y to s f h e —a s r e s mp o i g t e sa iiy a d
D. 通 过调 整 前后 桥 上 的一 粒 内六 角螺 丝 来 调 整 车身 高 度 ; E 压缩 弹 簧 .拆 开 减 震 弹 簧连 杆 的上 盖 。在 内筒 的螺 杆 里 加 装 垫 片 ,缩 短 连 杆 的长 度 . .
经 试 验 ,方 法 A 难 以找 到 合适 弹簧 。且有 犯 规 风 险 ;方法 B很 难 剪 到合 适 的长 度 并保 持 四轮 高
授 ,硕 士 生导 师 ,通信 作 者 ,主 要从 事模 式 识 别方 面 的研 究.
第= 卷 第2 : 1 5 期
刘南昌等:飞思卡尔杯 B型车模机械部件的改进探讨
5 7
据 采集 和 速 度控 制 不 利 .为 提 高 小 车 的速 度 和安 全 性 , 需要 对 B型 车模 进 行 底 盘 重 心及 减 震 的调整 ,
a in e t lg m n
“ 飞思卡尔”杯全 国大学生智能车大赛已经成功举办了四届,为了增加大赛的挑战性及新鲜感 ,
从第 五届 开始 ,大赛 要 求光 电组 和摄 像头 组使 用 B型 车模 .B型 车模 由玩 具遥控 越野 车模 改造而来 ,
对于 需要快 速反 应 的竞 速型 比赛 ,B型车模 存在 不少 问题 ,如底 盘太 高 、减震 器过 于灵敏 、舵 机响应 慢 、测 速码 盘安装 不 便 、四轮 驱动控 制 等.为适应 大赛 要求 ,需 对 B型车模 做技 术 改进 ,本 文针对上 述 问题 开展 了 B型 车模 机械 部件 的改进研 究 ,提 出了有效 的解决 办法 ,经 试验 取得 了较好 的效果 .
吉林大学汽车工程学院

吉林大学汽车工程学院(原吉林工业大学汽车工程系)成立于1955年,由原交通大学、华中工学院和山东工学院的相关专业整体搬迁组建而成,五十年来为我国汽车行业培养了人数众多的技术和管理人才,并在汽车整车与底盘设计、汽车及其零部件制造,混合动力汽车设计理论与控制技术等多个学科领域,具有国内领先的研究和技术积累优势,具备跟踪汽车领域国际前沿技术和承担国家重大科研项目的能力。
1986年正式更名为汽车工程学院,是我国汽车行业高层次复合型人才培养基地、基础共性技术研究开发基地和为行业解决重大基础和关键技术问题的依托单位。
学院设有车辆工程、工业设计(车身设计)、热能与动力工程(汽车发动机)、热能与动力工程(热能)四个本科专业,其车辆工程学科是国内汽车领域最早的国家级重点学科,拥有汽车动态模拟国家重点实验室。
学院拥有以工程院院士郭孔辉教授为核心的200多名教学和科研队伍,其中教授45 人, 副教授68人, 含中国工程院院士1人,国务院学位委员会学科评议组成员1 人,长江学者1人,泰山学者1人,博士生导师29人,教师中拥有博士学位的占50%以上。
学院支撑着博士后流动站2个,博士学位授权点3个,硕士学位授权点7个,本科生专业4个,其中车辆工程和动力机械及工程2 个专业为“211”工程首批重点建设专业,也为特聘教授设岗专业。
在读博士生近100 人、硕士生500余人、本科生2000余人、国外留学生以及访问学者15人,已累计向社会输送各类专业人才17000 余人,一些毕业生已经成为著名专家学者、汽车行业中有影响的领导、企业家和专家。
实验条件:·汽车动态模拟实验室汽车动态模拟国家重点实验室(拟更名为汽车仿真与控制国家重点实验室)是1989年获得批准,利用世界银行贷款建设的国家重点实验室,1993年正式投资建设,1996年12月建成并通过国家验收。
从1997年起正式进入国家重点实验室队列,对外开放运行。
2003年3月以优异的成绩通过由科技部组织的对工程和材料领域国家重点实验室评估。
邑大学子在全国大学生“飞思卡尔”杯智能车竞赛中再创佳绩
2 1 正 00
3 结 论
实验 结果 表 明 :通过 控 制 反 应条 件 ,可 以在一 定 范 围内控 制 C 2 的 粒 度和 粒 度分 布 ,进 而可 u0 根据 C 2 u0在 涂 料 、玻 璃 、陶瓷 、有机催 化剂 等特 定 产 品 中的需 要 ,制 备 出符 合特 定 要求 的 C 2 u0粉
【 责任 编辑 :熊玉涛 】
… ~… …一 ………… …… 一 … …… ………~ ~一 …… ~一 …… ~一 …一 ~…… 一~… ~一 ~~ ~ } 一… …一 ~一 …一 “
}
、
邑大 学子 在 全 国大 学 生 “ 思卡 尔 "杯 智 能车 竞赛 中再创 佳 绩 飞
^
≥
2 () 1- I 5 3 : 7 2
【】赵 华栋 ,王栋 .张 兰月 ,等 .高 反 应浓 度 下制 备 不 同形 貌 氧化 亚铜 的简 易方 法【】 机 化 学学 报 ,2 0 , 4 J.无 0 9
2 () 1 2 16 5 1: 4 -4 .
【】宫 泮伟 ,姜磊 ,翟 玉 春 ,等 .超 细 氧化 亚 铜 的制 备研 究 [】 属功 能 材料 ,2 0 ,l ( ) 1 ・8 5 J.金 0 8 1: 6 l . 5
的成绩 :2 0 0 8年 第 3届 “ 飞思卡 尔”杯全 国大学生智能 车竞 赛 ( 华南赛 区 ) ,我校 的 5
支代表队获得 了华南赛区 4 个三等奖、1 个优秀奖;20 年第 4 “ 09 届 飞思卡尔”杯智 }
}
能汽车竞赛华南赛区比赛和全国总决赛中,我校的 4支参赛队伍在华南赛区比赛中取 i
得了 1 个一等奖、2 个二等奖、1 个三等奖,在全国总决赛中取得 了 1 个全国二等奖。 } }
自动化赛事

自动化专业可以参加的赛事1、全国大学生“飞思卡尔”杯智能汽车竞赛简介:全国大学生“飞思卡尔”杯智能汽车竞赛起源于韩国,是韩国汉阳大学汽车控制实验室在飞思卡尔半导体公司资助下举办的以HCS12单片机为核心的大学生课外科技竞赛。
组委会提供一个标准的汽车模型、直流电机和可充电式电池,参赛队伍要制作一个能够自主识别路径的智能车,在专门设计的跑道上自动识别道路行驶,最快跑完全程而没有冲出跑道并且技术报告评分较高为获胜者。
其设计内容涵盖了控制、模式识别、传感技术、汽车电子、电气、计算机、机械、能源等多个学科的知识,对学生的知识融合和实践动手能力的培养,具有良好的推动作用。
承办学校及全国总决赛特等奖学校第一届(2006年):承办:清华大学特等奖:清华大学第二届(2007年):承办:上海交通大学特等奖:上海交通大学第三届(2008年):承办:东北大学摄像头组冠、亚、季军:东北大学、北京科技大学、上海交通大学光电组冠、亚、季军:武汉科技大学、北京科技大学、东北大学第四届(2009年):承办:北京科技大学摄像头组冠、亚、季军:北京科技大学、上海交通大学、上海大学光电组冠、亚、季军:北京科技大学、清华大学、杭州电子科技大学第五届(2010年):承办:杭州电子科技大学摄像头组冠、亚、季军:北京科技大学、杭州电子科技大学信息工程学院、南京师范大学光电组冠、亚、季军:杭州电子科技大学、杭州电子科技大学信息工程学院、乐山师范学院电磁组冠、亚、季军:广东技术师范学院、清华大学、杭州电子科技大学第六届(2011年):承办:西北工业大学摄像头组冠、亚、季军:湖南大学、北京科技大学、山东大学光电组冠、亚、季军:西北工业大学、电子科技大学、乐山师范学院电磁组冠、亚、季军:杭州电子科技大学、北京科技大学、西北工业大学第七届(2012年):承办:南京师范大学摄像头组冠、亚、季军:北京科技大学、常熟理工学院、电子科技大学光电组冠、亚、季军:北京科技大学、山东大学、乐山师范学院电磁组冠、亚、季军:中南民族大学、浙江大学、华中科技大学第八届(2013年):承办:哈尔滨工业大学摄像头组冠、亚、季军:北京科技大学、武汉科技大学、西安交通大学光电组冠、亚、季军:北京科技大学、厦门大学、厦门大学嘉庚学院电磁组冠、亚、季军:电子科技大学、北京科技大学、东北大学秦皇岛分校2、大学生iCAN物联网创新创业大赛中国大学生iCAN物联网创新创业大赛,是教育部计算机教学指导委员会、全球华人微纳米分子系统学会联合主办的一项全国性物联网技术的年度创新赛事,是教育部质量工程支持项目之一,同时也是国际大学生物联网创新创业大赛(International Contest of Applications in Network of Things,简称iCAN)的中国选拔赛。
第二届“飞思卡尔”杯全国大学生智能汽车邀请赛技术报告
10.4设计中存在的问题……………………………………………26.
10.5以后寄语…………………………………………………………27
第一章 引 言
1.1 竞赛背景介绍
受教育部高等教育司托付,高等学校自动化专业教学指导分委员负责主办全国大学生智能车竞赛。该项竞赛已列入教育部主办的全国五大竞赛之一。2007年8月日,在上海交通大学举行第二届全国大学生智能车竞赛。本届的竞赛,第一是在全国五大赛区进行预选赛,之后将有只赛车到上海进行总决赛。在竞赛中,“参赛选手须使用大赛组委会统一提供的竞赛车模,采纳飞思卡尔16操纵器MC9S12DG128作为核心操纵单元,自主构思控传感器信号采集处理、操纵算法及执行、动力电机驱动、转向舵机操纵等,完成智能车工程制作及调试,于指定日期与地点参加场地竞赛。参赛队伍之名次(成绩)由赛车现场成功完成赛道竞赛时刻为主,技术方案及制作工程质量评分为辅来决定”,“须采纳统一提供的车模,须采纳限定的飞思卡尔16位微操纵器 MC9S12DG128 作为唯独操纵处理器,车模改装完毕后,尺寸不能超过:250mm 宽和400mm长,高度无限制”,“跑道宽度不小于600mm,跑道表面为白色,中心有连续黑线作为引导线,黑线宽25mm”,同时跑道有坡道。
第二章赛车系统整体设计
2.1系统硬件结构设计
依照激光传感器方案设计,赛车共包括大模块:激光传感器模块
操纵处理芯片MC9S12DG128,舵机驱动模块,电机驱动模块、速度传感器
第三章光电传感器
3.1传感器选型
由于赛道具体信息还不明白,因此必须选择合适的路面信息检测传感器。通过查阅相关资料,了解到目前常用的寻线技术有:光电寻线、磁诱导寻线和摄像头寻线。光电寻线一样由多对红外收发管组成,通过检测接收到的反射光强,判定黑白线。在这种方案中,一对收发管只能检测一个点的信息,精度有限。但其优点是电路简单,处理方便。路面磁诱导与智能车辆的车载机器视觉诱导相比,最大优点是完全不受光照变化的阻碍。但这种方式必须以车道中心线上布设的离散磁道钉作为车道参考标记,这违抗了竞赛规则。摄像头寻线通过图像采集,动态拾取路径信息,并对各种情形进行分析。它具有信息量大,能耗低的优点,但对数据的处理相对复杂。作为第一次参加此次大赛,并通过对第一届竞赛的研究,我们决定依旧从光电管入手。
大学生可以参加的竞赛项目

(共91项)
序号
竞赛名称
主办单位
1
第八届“挑战杯”全国大学生创业计划竞赛
共青团中央、中国科协、教育部、全国学联
2
第三届“北斗杯”全国青少年科技创新大赛
教育部科技司、团中央学校部、中国科协青少年科技中心、中国卫星导航系统管理办公室
3
第二届全国高等学校采矿工程专业学生实践作品大赛
12
山东省高校大学生测量技能大赛
山东测量学会
13
全国第二届地质技能大赛
中国地质调查局、中国地质学会地质教育研究分会
14
第五届山东省高校结构设计大赛
山东省土木工程学会建筑结构专业委员会、山东大学
15
2012年山东省大学生建筑设计竞赛
山东省住房和城乡建设厅、山东省科学技术协会
16
2012全国高等学校城市规划专业社会综合实践调研报告课程作业评优
38
第三届“蓝桥杯”全国软件专业人才设计与创业大赛
工业与信息化部人才交流中心
39
建行“e路通”杯第五届全国大学生网络商务创新应用大赛
中国建设银行、中国互联网协会
40
“金蝶杯”全国大学生创业设计大赛
教育部全国高等学校学生信息咨询与就业指导中心
41
第四届全国大学生“创新创意创业”电子商务挑战赛
中国信息经济学学会信息管理专业委员会
8
supermap杯全国高校GIS大赛
中国地理学会、北京超图软件股份有限公司
9
全国高校GIS技能大赛
中国测绘学会、工业和信息化部人才交流中心、教育部地理信息系统软件及其应用工程研究中心
10
全国高校GIS论坛
GIS论坛组委会
全国大学生“飞思卡尔杯”智能车竞赛
全国大学生“飞思卡尔杯”智能车竞赛(郑新旺老师提供)(一)项目简介为加强大学生实践、创新能力和团队精神的培养,促进高等教育教学改革,受教育部高等教育司委托,由教育部高等学校自动化专业教学指导分委员会主办全国大学生智能汽车竞赛。
该竞赛是以智能汽车为研究对象的创意性科技竞赛,是面向全国大学生的一项具有探索性工程的实践活动,是教育部倡导的大学生科技竞赛之一。
该竞赛以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,旨在促进高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神,为优秀人才的脱颖而出创造条件。
全国大学生“飞思卡尔”杯智能汽车竞赛由竞赛秘书处设计、规范标准硬软件技术平台,竞赛过程包括理论设计、实际制作、整车调试、现场比赛等环节,要求学生组成团队,协同工作,初步体会一个工程性的研究开发项目从设计到实现的全过程。
该竞赛融科学性、趣味性和观赏性为一体,是以发展迅猛、前景广阔的汽车电子为背景,涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械与汽车等多学科专业的创意性比赛。
该竞赛规则透明,评价标准客观,坚持公开、公平、公正的原则,力求向健康、普及、持续的方向发展。
全国大学生智能汽车竞赛原则上由全国设有自动化专业的高等学校(包括港、澳地区的高校)参赛。
竞赛首先在各个分赛区进行报名、预赛,各分赛区的优胜队将参加全国总决赛。
每届比赛根据参赛队伍和队员情况,分别设立光电组、摄像头组、电磁组、创意组等多个赛题组别。
每个学校可以根据竞赛规则选报不同组别的参赛队伍。
全国大学生智能汽车竞赛组织运行模式贯彻“政府倡导、专家主办、学生主体、社会参与”的16字方针,充分调动各方面参与的积极性。
诚毅学院每年9月组织选拔和培训,经过近一年的准备后,次年7月份参加比赛。
诚毅学院智能车队自2012年组建以来,2012年获得华南赛区三等奖三项,2013年获得华南赛区三等奖五项,2014年获得华南赛区二等奖五项、三等奖一项,成绩逐年提高。
全国大学生飞思卡尔杯智能汽车竞赛
上海理工大学首届“飞思杯”智能车制作大赛细节红外循迹:一、器材规定:该组比赛中赛方提供STC89C52系统板和MC9S12XS128系统板作为赛车的核心控制单元。
参赛队伍可以从中选取适合自己的芯片来完成比赛,但是使用STC89C52系统板,最终成绩不加分;使用MC9S12XS128系统板,最终成绩加5分。
如果车模中禁止改动的部件发生损坏,需要使用相同型号的部件替换。
红外循迹赛车安装完毕后,车模尺寸不能超过:250mm宽和400mm长。
二、赛道基本参数见附件三;三、裁判及技术评判员将由上海理工大学飞思卡尔智能车赛队担任。
四、比赛规则:1.比赛过程规则i.比赛赛道实际布局将在比赛当日揭示,同时在赛场内将安排采用与制作实际赛道相同的材料所做的测试赛道供参赛队进行现场调试。
ii.每支队伍的比赛顺序将有电脑随机排列。
iii.每支参赛队伍可以在每轮比赛之前有10分钟的现场调整时间。
在此期间,参赛队伍只允许对赛车的硬件(不包括微控制器芯片)进行调整。
iv. 比赛时,赛车必须放在起跑线后方1米之内,让车在出发区静止2秒以上后自行启动,否则扣5分。
v. 每辆赛车按规则在赛道上跑一圈,以计时起始线为计时点,跑完一圈后赛车需要自动停止在起始线之后三米之内的赛道内,如果没有停止在规定的区域内,赛事成绩减去5分。
赛车在比赛途中,可以允许小车最多同时两个轮子不在赛道上,三个或三个以上轮子同时不在赛道上时算冲出跑道。
vi. 每个参赛队伍有三次机会,三次机会中取最好的一次成绩作为最终的赛事成绩。
参赛队伍的赛车需要在赛方指定的赛道上跑完一圈,求出此次赛车的平均速度,然后平均速度乘以100作为赛事的成绩。
成绩将显示在大屏幕上。
vii. 跑完整个赛道的队伍,比赛后,带着自己的赛车到答辩处进行答辩。
三次机会均未能跑完整个赛道的队伍不进行答辩。
viii. 在答辩期间,技术评判组将对赛车进行现场技术检查,如有违反器材限制规定的立即取消大赛成绩。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二届全国大学生“飞思卡尔”杯智能汽车竞赛技术报告学校:大连民族学院队伍名称:民院二队参赛队员:聂志戎易弓张新秀带队教师:陈兴文关于技术报告和研究论文使用授权的说明本人完全了解第二届全国大学生“飞思卡尔”杯智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:聂志戎易弓张新秀带队教师签名:陈新文日期:2007-8-20第一章引言 (1)第二章智能车寻迹的硬件系统设计 (2)2.1.电源管理电路 (2)2.2.电机驱动电路 (4)第三章系统软件设计 (7)3.1.软件主流程 (7)D图像信息的采集与特征的提取 (8)3.3.电机速度与舵机转向的控制算法 (9)3.3.1.当前赛道信息的识别与控制 (9)3.3.2.对未来赛道信息的预测与控制 (10)第四章模型车机械安装及主要技术参数说明 (11)4.1.智能车机械部分的安装及改造 (11)4.2.智能车的主要技术参数说明 (11)第五章开发工具与调试 (12)5.1.开发工具、安装 (12)5.2.调试过程 (12)参考文献 (13)附录A 程序源代码 (14)附录B基于CCD图像的分析方法及预测算法 (22)第一章引言全国大学生“飞思卡尔”智能汽车竞赛的比赛规则是:使用大赛组委会统一提供的竞赛车模,采用飞思卡尔的16位单片机MC9S12DG128 作为核心控制单元,自主构思控制方案及系统设计,包括路径信息的采集与处理、控制算法及执行、电机驱动、舵机转向控制等,以比赛完成的时间短者为优胜者。
其中赛道为在白色底板上铺设黑色引导线。
制作智能车,需要参赛队员学习并应用嵌入式开发工具CodeWarrior和在线开发与在线调试。
自行设计并制作硬件电路板,设计自动识别路径的方案,学习微控制器的MC9S12DG128的软件编程。
其专业知识涉及控制、模式识别、检测技术、汽车电子、计算机和机械等多个学科,对学生的知识的融合和实践动手能力的培养,有很大的推动作用。
本队以单片机MC9S12DG128 作为核心,使用CodeWarrior 软件开发工具,充分利用单片机各功能模块设计制作了本智能车控制系统。
根据赛道特点,主要有三种方案:光电传感器方案,摄像头方案,光电传感器与摄像头融合控制方案。
本方案采用CCD摄像头对道路信息进行检测,可以从图像中提取较多的有用信息,其中包括小车前视方向与道路方向的斜率和道路的曲率等。
提前判断道路弯道、直道的路况信息,从而实现安全过弯,快速通过直道,在保证稳定的条件下追求行使时间最短。
第二届全国大学生智能汽车竞赛技术报告第二章智能车寻迹的硬件系统设计本方案采用组委会提供的核心9S12DG128电路板,自行设计了核心板以外的驱动系统。
利用CCD采集路径信息,传给单片机,对图像信号进行处理,从而控制舵机转向和直流电机调速。
整个系统的硬件结构框图如图 2.1所示。
图2.1 系统硬件结构框图整个系统的主要单元电路包括电源管理电路、电机驱动电路、视频同步分离电路、转速测量电路。
下面将各电路简要介绍如下:2.1.电源管理电路电源的管理在整个电路中起着很重要的作用,工作电压的稳定性直接关系着系统的稳定性,关系着系统能否正常工作。
它不仅为单片机提供工作电压,而且为各个控制芯片提供电压,为CCD提供工作电压。
本智能车系统中,我们选择了一款低差压芯片TPS7350,该芯片的优点是当输出电流为100mA时,最大差压只有35mV。
为了减小系统运行过程中电机波纹对电源的干扰,设计了大电容与大电感组成的LC滤波电路,对电源管理芯片的电源进行滤波,保证电源芯片的正常工作电压。
第二章智能车寻迹的硬件系统设计整个智能车系统所需的+5V的工作电压是使用一片TPS7350提供的。
原理图如图2.2所示。
图2.2 TPS7350工作原理图为了提高舵机的响应时间,我们将舵机的工作电压提高到+6V。
仍然使用低差压电源芯片TPS7350。
由于TPS7350的输出电压是+5V,为了得到+6V的工作电压,我们通过提高芯片地电位的方式,即,将芯片的地通过两个二极管接至供电电源的地,这样就可以为舵机提供+6V的工作电压。
原理图如图2.3所示。
图2.3 舵机工作电压原理图第二届全国大学生智能汽车竞赛技术报告CCD摄像头的工作电压要求比较高,我们使用升压模块将电压提高到+9V,从而保证CCD能够正常工作。
原理图如图2.4 所示。
图2.4 CCD工作电压原理图2.2.电机驱动电路直流电机的转速控制采用PWM控制。
由于单片机输出的脉宽无法驱动竞赛用的直流电机,因此需要通过驱动电路才能驱动电机,设计中采用组委会提供的MC33886 芯片。
为增强其驱动能力,可以将芯片两个输入引脚并联使用,接到单片机PWM引脚,并将两个输出并联接电机,增强电机带负载能力。
此芯片具有短路保护、欠压保护与过温保护功能,将芯片的FS引脚接一信号灯,对异常情况进行报警。
原理图如图2.5所示。
第二章智能车寻迹的硬件系统设计图2.5 电机驱动原理图2.3.视频同步分离电路视频同步分离电路主要采用视频同步分离芯片LM1881,直接对视频信号进行同步分离,准确地获得所需的视频图像信号,将视频信号通过一个电容接到LM1881的2脚,即可得到控制单片机进行A/D采集的控制信号:一行同步CSO,一场同步VS与奇偶场同步O/E。
原理图如图 2.6所示。
图2.6 视频同步分离原理图2.4.转速测量电路小车转速的检测是对车速进行闭环控制的基础,直接影响到将来控制效果的好坏。
本设计采用光电码盘测速法。
把分度盘安装在小车的后轴,随电机驱第二届全国大学生智能汽车竞赛技术报告动后轴转动使分度盘随之等速转动。
利用红外透射式传感器检测到的通断个数就能检测到小车后轮转速。
速度传感器采用红外投射式传感器,利用发射管发出红外光线,透过分度盘的缺口照射光敏三极管,使其迅速由截至状态变为导通。
随着分度盘转动,反复形成脉冲信号,利用脉冲累加对脉冲信号进行计数,在一选定的时间内读出脉冲总数,从而计算出小车的当前速度。
传感器结构原理图如图2.7 所示。
图2.7 转速测量原理图第三章系统软件设计本设计系统中采用的是CCD摄像头对道路信息进行采集,得到实时图像数据后,对图像进行处理,提取赛道中的引导黑线的位置,从而以此作为改变舵机转向和控制电机转速的理论依据。
本方案中,以CodeWarrior4.1为开发工具,系统的软件设计包括:系统的初始化,视频图像信号采集及处理程序,以及对小车电机、舵机的控制程序。
具体实现以下的功能:系统初始化、视频图像信号的采集、视频图像的分析及处理、电机控制、舵机的控制。
3.1.软件主流程小车系统软件的运行主流程是:采集程序在PJ口中断服务程序中对CCD 摄像头的场视频信号进行控制,在外中断服务程序中采集每行信息,每13行读取一行信息。
主程序交替对数据进行处理和计算并给出控制量,控制周期为20ms。
主程序检测到完成一场采集数据结束的标志后,对相应的数据进行处理并计算控制量,控制舵机转向以及电机的转速,清除数据结束标志位,同时等待下一场数据的到来。
软件的主流程如图 3.1 所示。
程序见附录A。
第二届全国大学生智能汽车竞赛技术报告3.2.C CD图像信息的采集与特征的提取CCD摄像头输出的是标准的视频复合信号,利用同步信号分离芯片LM1881 和S12单片机的A/D转换器可以对视频信号进行采集,从而得到CCD的灰度图像数据,经二值化处理就可以得到跑道黑线轨迹在图像上的点阵。
单片机总线第三章系统软件设计频率超频到32MHz ,每行最多能够采集42 个点,前10个数据为行消隐,共采集32个有效数据点,采集20行信息。
CCD黑线中心坐标的提取大致的思想如下。
首先判断图像采集是否完成,完成了才开始下面的处理。
从最近一行图像开始检测,设定检测的左右边界位置。
根据本行获得的黑线左右边界来确定下一行的左右边界值。
如此循环直到处理完整幅图像。
另外,可能会有异常信息,全黑或者检测不到黑线,此时作为异常情况,置一个异常标志位,对其进行单独处理。
3.3.电机速度与舵机转向的控制算法3.3.1.当前赛道信息的识别与控制一场图像数据处理结束后,赛道的路径信息会清晰的再现出来。
根据整幅图像黑线的有效起点和有效终点的斜率和偏离图像中心位置的偏移量,就可以判断当前赛道是直道还是弯道。
根据这些信息给定舵机的控制量。
此方案获的主要思想如下:首先找到图像数据最近位置的第一个有效行,同时记录黑线的中心位置信息,定义为(X0,Y0 )。
然后再找最远位置的第一个有效行,以及其黑线中心位置,定义为(X1,Y1 )。
据此算出黑线的斜率(Y1 - Y0 )/ (X1 - X0 ),和黑线偏离图像中心位置的偏移量| X0 |。
其示意图如图3.2所示。
第二届全国大学生智能汽车竞赛技术报告其计算公式为:舵机控制量 = K0*X0 + K1* (X1 - X0 )/(Y1 -Y0 )(4)根据不断的调试和经验数据得到比例系数 K0,K1 的确切的值。
3.3.2.对未来赛道信息的预测与控制单纯的判断当前赛道的信息,不能十分准确地给出舵机转角的控制量。
小车在高速运行时,遇到比较急的弯道,容易出现差错。
经常出现转角控制量滞后而冲出跑道。
鉴于此,我们在原方案的基础上添加了预测算法。
根据CCD视频图像的扫描特点,前视距离较远处扫描到的图像含有信息较多,所以根据一幅图像的前视距离最远处1/4段曲线的切线可以预测到未来赛道的信息。
在曲线的前面1/4处取一点(X2,Y2),其示意图如图3.1所示。
舵机转向的计算公式为:舵机控制量 = K0*X0 + K1*(X1 - X0)/(Y1 -Y0)+K2 *(X1-X2)/(Y1-Y2) (5)根据点(X2,Y2)和点(X1,Y1)段曲线的弯曲程度,可以预测出下一段道路的走向。
调解系数K2,控制舵机转向的角度,降低舵机转向滞后的机率。
可以使小车不完全按照黑线走,走内道,灵活,连续地行使。
电机的控制速度采用闭环控制,根据速度反馈和弯道信息给定当前电机的速度,直道上加速,进弯道时减速,由于CCD摄像头看的比较远,可以提前看到弯道,减速,进弯道后看到另一场图像,再进行下一次处理,根据控制策略,进行加减速。
同时结合速度反馈,当速度超过某标定值时,减速处理,低于标定值时,加速处理。
第四章模型车机械安装及主要技术参数说明整个智能车主要由车模、舵机、直流电机、 S12核心电路板、驱动电路板、CCD摄像头、电池等组成。
智能车的安装包括电池部分的安装、最小系统电路板的安装、舵机的安装、驱动电路板的安装及摄像头的安装。