linux中添加自己的设备驱动(二)
关于linux的fb_framebuffer 设备驱动
草稿V2.4.01framebuffer设备即帧缓冲设备(简写fb)提供了显示接口的抽象描述。
他同时代表着显示接口的存储区,应用程序通过定义好的函数访问,不需要知道底层的任何操作。
Framebuffer驱动使用的设备节点,通常位于/dev目录,如/dev/fb*.从用户角度看,fb设备和其他/dev下面的设备类似:普通的字符设备,主设备号29,次设备号定义fb的索引。
通常,使用如下方式(前面的数字表示次设备号)0=/dev/fb0第一个fb设备1=/dev/fb1第二个fb设备考虑到向下兼容,可以创建符号链接:/dev/fb0current->fb0/dev/fb1current->fb1fb也是一种普通的内存设备,可以读写其内容。
例如,屏幕抓屏:cp/dev/fb0myfilefb虽然可以像内存设备(/dev/mem)一样,对其read,write,seek以及mmap。
但区别在于fb使用的不是整个内存区,而是显存部分。
通过ioctl可以读取或设定fb设备参数,很重要的一点,颜色表(cmap)也要通过Ioctl设定。
查看<linux/fb.h>就知道有多少ioctl应用以及相关数据结构。
这里给出摘要:-你可以获取设备一些不变的信息,如设备名,屏幕的组织(平面,象素,...)对应内存区的长度和起始地址。
-也可以获取能够改变的信息,例如位深,颜色格式,时序等。
如果你改变这些值,驱动程序将对值进行优化,以满足设备特性(如果你的设定,设备不支持,返回EINVAL)。
-你也可以获取或设定部分颜色表。
所有这些特性让应用程序十分容易的使用framebuffer设备。
Xserver可以使用/dev/fb*而不需知道硬件的寄存器是如何组织的。
XF68_FBDev是一个用于位映射(单色)Xserver,唯一要做的就是在应用程序在相应的位置设定是否显示。
在新内核中,帧缓冲设备可以工作于模块中,允许动态加载。
linux的bus、device、driver介绍

linux的bus、device、driver介绍 linux 通过device和driver分别管理系统中的设备和驱动,⽤bus将设备和驱动关联起来,bus可以看成是设备和驱动的媒介,可以匹配设备和驱动。
这样设备和驱动可以独⽴加载,互不影响。
sysfs是⼀个基于内存的⽂件系统,它的作⽤是将内核信息以⽂件的⽅式提供给⽤户程序使⽤。
我们都知道设备和对应的驱动都是由内核管理的,这些对于⽤户空间是不可见的。
现在通过sysfs,可以在⽤户空间直观的了解设备驱动的层次结构。
⼀、bus注册过程bus_type结构体代表⼀条总线,如下所⽰:struct bus_type {const char *name; //名称const char *dev_name;struct device *dev_root;struct device_attribute *dev_attrs; /* use dev_groups instead */const struct attribute_group **bus_groups;const struct attribute_group **dev_groups;const struct attribute_group **drv_groups;int (*match)(struct device *dev, struct device_driver *drv); //device和driver的匹配函数int (*uevent)(struct device *dev, struct kobj_uevent_env *env);int (*probe)(struct device *dev);int (*remove)(struct device *dev);void (*shutdown)(struct device *dev);int (*online)(struct device *dev);int (*offline)(struct device *dev);int (*suspend)(struct device *dev, pm_message_t state);int (*resume)(struct device *dev);const struct dev_pm_ops *pm;const struct iommu_ops *iommu_ops;struct subsys_private *p; struct lock_class_key lock_key;};struct subsys_private {struct kset subsys; //对应/sys/bus⽬录struct kset *devices_kset; //对应/sys/bus/devices⽬录struct list_head interfaces;struct mutex mutex;struct kset *drivers_kset; //对应/sys/bus/drivers⽬录struct klist klist_devices; //该bus下的所有devicestruct klist klist_drivers; //该bus下的所有driverstruct blocking_notifier_head bus_notifier;unsigned int drivers_autoprobe:1;struct bus_type *bus;struct kset glue_dirs;struct class *class;};向系统添加⼀条bus_type总线时,改总线会⾃动添加到/sys/bus⽬录下,bus⽬录是系统⾃动创建的,这个bus⽬录为static struct kset *bus_kset,定义在kernel/drivers/base/bus.c中。
在linux系统下如何安装网卡驱动
2011年研发二部工作周报月报作者:***时间:2012-6-13目录一、整理漏扫系统的结构 (1)1、整理NetScan目录中的程序。
(1)2、整理proftpd目录中内容(插件的检测信息)。
(4)3、整理proxyd目录中的安管(安管平台)。
(8)二、熟悉Nessus的工作原理 (8)1、Nessus扫描引擎的工作原理.... 错误!未定义书签。
三、整理运行的整个流程............... 错误!未定义书签。
1、通过客户端下发策略,上传到服务器上。
错误!未定义书签。
2、服务端:接收客户端下发的策略。
错误!未定义书签。
3、服务端进行身份的认证........ 错误!未定义书签。
一、整理漏扫系统的结构网卡是Linux服务器中最重要网络设备。
据统计,Linux网络故障有35%在物理层、25%在数据链路层、10%在网络层、10%在传输层、10%在对话、7%在表示层、3%在应用层。
由此可以看出,网络故障通常发生在网络七层模型的下三层,即物理层、链路层和网络层。
对应于实际网络也就是使用的网络线缆、网卡、交换机、路由器等设备故障。
Linux的网络实现是模仿FreeBSD的,它支持FreeBSD 的带有扩展的Sockets(套接字)和TCP/IP协议。
它支持两个主机间的网络连接和Sockets通讯模型,实现了两种类型的Sockets:BSD Sockets和INET Sockets。
它为不同的通信模型和服务质量提供了两种传输协议,即不可靠的、基于消息的UDP传输协议和可靠的、基于流的传输协议TCP,并且都是在IP网络协议上实现的。
INET sockets 是在以上两个协议及IP协议之上实现的。
由于交换机、路由器通常独立于Linux或者其他操作系统。
网卡设置故障是造成Linux 服务器故障最主要原因。
可能因为硬件的质量或性能、磨损老化、人为误操作、不正确的网络设置、管理问题、Linux软件的BUG、系统受到黑客攻击和Linux病毒等原因造成。
Linux设备驱动之Ioctl控制

Linux设备驱动之Ioctl控制 ⼤部分驱动除了需要具备读写设备的能⼒之外,还需要具备对硬件控制的能⼒。
⼀、在⽤户空间,使⽤ioctl系统调⽤来控制设备,原型如下:int ioctl(int fd,unsigned long cmd,...);/*fd:⽂件描述符cmd:控制命令...:可选参数:插⼊*argp,具体内容依赖于cmd*/ ⽤户程序所作的只是通过命令码告诉驱动程序它想做什么,⾄于怎么解释这些命令和怎么实现这些命令,这都是驱动程序要做的事情。
⼆、驱动ioctl⽅法:int (*ioctl) (struct inode *inode,struct file *filp,unsigned int cmd,unsigned long arg);/*inode与filp两个指针对应于应⽤程序传递的⽂件描述符fd,这和传递open⽅法的参数⼀样。
cmd 由⽤户空间直接不经修改的传递给驱动程序arg 可选。
*/ 在驱动程序中实现的ioctl函数体内,实际上是有⼀个switch {case}结构,每⼀个case对应⼀个命令码,做出⼀些相应的操作。
怎么实现这些操作,这是每⼀个程序员⾃⼰的事情,因为设备都是特定的。
关键在于怎么样组织命令码,因为在ioctl中命令码是唯⼀联系⽤户程序命令和驱动程序⽀持的途径。
在Linux核⼼中是这样定义⼀个命令码的:____________________________________| 设备类型 | 序列号 | ⽅向 | 数据尺⼨ ||----------|--------|------|-------- || 8 bit | 8 bit | 2 bit |8~14 bit||----------|--------|------|-------- | 这样⼀来,⼀个命令就变成了⼀个整数形式的命令码。
但是命令码⾮常的不直观,所以Linux Kernel中提供了⼀些宏,这些宏可根据便于理解的字符串⽣成命令码,或者是从命令码得到⼀些⽤户可以理解的字符串以标明这个命令对应的设备类型、设备序列号、数据传送⽅向和数据传输尺⼨。
如何在Linux系统中安装驱动程序

如何在Linux系统中安装驱动程序Linux系统作为一个开源的操作系统,广泛应用于各种设备和领域。
而安装驱动程序是在Linux系统中使用外部硬件设备的关键步骤之一。
在本文中,我们将学习如何在Linux系统中安装驱动程序的方法和步骤。
1. 检查硬件设备在安装驱动程序之前,首先需要确定硬件设备的型号和制造商。
可以通过查询设备的型号或者查看设备的相关文档来获取这些信息。
这是非常重要的,因为不同的设备可能需要不同的驱动程序来正确地工作。
2. 更新系统在安装驱动程序之前,确保你的Linux系统已经是最新的状态。
可以通过在终端中运行以下命令来更新系统:```sudo apt-get updatesudo apt-get upgrade```更新系统可以确保你拥有最新的软件包和驱动程序,以获得更好的兼容性和性能。
3. 查找合适的驱动程序一般来说,大部分硬件设备的驱动程序都可以在Linux系统的软件仓库中找到。
可以通过使用包管理器(如apt、yum等)来查找并安装合适的驱动程序。
运行以下命令来搜索并安装特定的驱动程序:```sudo apt-cache search 驱动程序名称sudo apt-get install 驱动程序名称```注意替换“驱动程序名称”为具体的驱动程序名称。
安装驱动程序可能需要输入管理员密码和确认安装。
如果你无法在软件仓库中找到合适的驱动程序,可以转向设备的制造商网站或者开源社区来获取。
下载驱动程序后,根据驱动程序提供的文档和说明来安装。
4. 编译和安装驱动程序有些驱动程序可能需要手动编译和安装。
在这种情况下,你需要确保你的系统已经安装了编译工具(如GCC、make等)。
在终端中切换到驱动程序所在的目录,并按照以下步骤进行编译和安装:```./configuremakesudo make install```以上命令将分别进行配置、编译和安装驱动程序。
在进行安装之前,可能需要输入一些配置选项或者确认安装。
Linux视频设备驱动编程(v4l2编程)
Linux视频设备驱动编程(v4l2编程)一.什么是video4linuxVideo4linux2(简称V4L2),是linux中关于视频设备的内核驱动。
在Linux 中,视频设备是设备文件,可以像访问普通文件一样对其进行读写,摄像头在/dev/video0下。
二、一般操作流程(视频设备):1. 打开设备文件。
int fd=open(”/dev/video0″,O_RDWR);2. 取得设备的capability,看看设备具有什么功能,比如是否具有视频输入,或者音频输入输出等。
VIDIOC_QUERYCAP,struct v4l2_capability3. 选择视频输入,一个视频设备可以有多个视频输入。
VIDIOC_S_INPUT,struct v4l2_input4. 设置视频的制式和帧格式,制式包括PAL,NTSC,帧的格式个包括宽度和高度等。
VIDIOC_S_STD,VIDIOC_S_FMT,struct v4l2_std_id,struct v4l2_format5. 向驱动申请帧缓冲,一般不超过5个。
struct v4l2_requestbuffers6. 将申请到的帧缓冲映射到用户空间,这样就可以直接操作采集到的帧了,而不必去复制。
mmap7. 将申请到的帧缓冲全部入队列,以便存放采集到的数据.VIDIOC_QBUF,struct v4l2_buffer8. 开始视频的采集。
VIDIOC_STREAMON9. 出队列以取得已采集数据的帧缓冲,取得原始采集数据。
VIDIOC_DQBUF10. 将缓冲重新入队列尾,这样可以循环采集。
VIDIOC_QBUF11. 停止视频的采集。
VIDIOC_STREAMOFF12. 关闭视频设备。
close(fd);三、常用的结构体(参见/usr/include/linux/videodev2.h):struct v4l2_requestbuffers reqbufs;//向驱动申请帧缓冲的请求,里面包含申请的个数struct v4l2_capability cap;//这个设备的功能,比如是否是视频输入设备struct v4l2_input input; //视频输入struct v4l2_standard std;//视频的制式,比如PAL,NTSCstruct v4l2_format fmt;//帧的格式,比如宽度,高度等struct v4l2_buffer buf;//代表驱动中的一帧v4l2_std_id stdid;//视频制式,例如:V4L2_STD_PAL_Bstruct v4l2_queryctrl query;//查询的控制struct v4l2_control control;//具体控制的值下面具体说明开发流程(网上找的啦,也在学习么)打开视频设备在V4L2中,视频设备被看做一个文件。
linux安装网卡驱动教程
linux安装网卡驱动教程在Linux系统中,网卡驱动是一个必需的组件,它允许计算机与网络相连,进行数据的传输和通信。
虽然大多数Linux发行版会自动安装一些常用的网卡驱动,但某些特殊型号的网卡可能需要手动安装对应的驱动程序。
下面是一个详细的Linux安装网卡驱动的教程,帮助你完成这个过程。
1. 首先,你需要确定你的网卡型号和型号。
可以通过以下命令获取:```lspci | grep Ethernet```这将列出系统中所有的以太网适配器,包括网卡的型号和型号。
2. 一旦你确定了网卡的型号和型号,你可以在厂商的官方网站或者第三方驱动程序网站上查找和下载对应的驱动程序。
确保选择与你的Linux发行版和内核版本兼容的驱动程序。
3. 下载驱动程序后,将其保存在你的计算机上的一个可访问的位置,比如家目录。
4. 打开终端,在命令行中输入以下命令以进入驱动程序所在目录:```cd ~/下载```这里假设你将驱动程序保存在`~/下载`目录下。
如果你将其保存在其他目录,请将命令中的路径替换为实际位置。
5. 解压驱动程序文件。
这可以通过以下命令完成:```tar zxvf 驱动程序文件名.tar.gz```这里的`驱动程序文件名`应该是你下载的驱动程序文件的实际名称。
6. 进入驱动程序文件夹。
这可以通过以下命令完成:```cd 驱动程序文件夹名```这里的`驱动程序文件夹名`是解压后的驱动程序文件夹的实际名称。
7. 阅读驱动程序的安装说明文档。
通常情况下,驱动程序的文件夹中都会包含一个README文件或者INSTALL文件,其中提供了安装驱动程序所需的具体步骤和说明。
8. 一般来说,安装驱动程序的第一步是编译驱动程序的源代码。
在终端中输入以下命令以编译驱动程序:```make```这将根据驱动程序的源代码编译出可执行的二进制文件。
9. 安装编译好的驱动程序。
在终端中输入以下命令以安装驱动程序:```sudo make install```这需要管理员权限,所以你可能需要输入管理员密码。
LinuxI2C驱动--用户态驱动简单示例

LinuxI2C驱动--⽤户态驱动简单⽰例1. Linux内核⽀持I2C通⽤设备驱动(⽤户态驱动:由应⽤层实现对硬件的控制可以称之为⽤户态驱动),实现⽂件位于drivers/i2c/i2c-dev.c,设备⽂件为/dev/i2c-02. I2C通⽤设备驱动以字符设备注册进内核的static const struct file_operations i2cdev_fops = {.owner = THIS_MODULE,.llseek = no_llseek,.read = i2cdev_read,.write = i2cdev_write,.unlocked_ioctl = i2cdev_ioctl,.open = i2cdev_open,.release = i2cdev_release,};res = register_chrdev(I2C_MAJOR, "i2c", &i2cdev_fops);3. 对设备⽂件进⾏读写时,可以调⽤read、write或者ioctl等⽅法,他们都是通过调⽤函数i2c_transfer来实现对I2C设备的操作的int i2c_transfer(struct i2c_adapter * adap, struct i2c_msg *msgs, int num){int ret;/* REVISIT the fault reporting model here is weak:** - When we get an error after receiving N bytes from a slave,* there is no way to report "N".** - When we get a NAK after transmitting N bytes to a slave,* there is no way to report "N" ... or to let the master* continue executing the rest of this combined message, if* that's the appropriate response.** - When for example "num" is two and we successfully complete* the first message but get an error part way through the* second, it's unclear whether that should be reported as* one (discarding status on the second message) or errno* (discarding status on the first one).*/if (adap->algo->master_xfer) {#ifdef DEBUGfor (ret = 0; ret < num; ret++) {dev_dbg(&adap->dev, "master_xfer[%d] %c, addr=0x%02x, ""len=%d%s\n", ret, (msgs[ret].flags & I2C_M_RD)'R' : 'W', msgs[ret].addr, msgs[ret].len,(msgs[ret].flags & I2C_M_RECV_LEN) ? "+" : "");}#endifif (in_atomic() || irqs_disabled()) {ret = mutex_trylock(&adap->bus_lock);if (!ret)/* I2C activity is ongoing. */return -EAGAIN;} else {mutex_lock_nested(&adap->bus_lock, adap->level);}ret = adap->algo->master_xfer(adap,msgs,num);mutex_unlock(&adap->bus_lock);return ret;} else {dev_dbg(&adap->dev, "I2C level transfers not supported\n");return -EOPNOTSUPP;}}4. i2c_transfer通过代码可以看出,i2c_transfer 通过调⽤相应的 adapter 的 master_xfer ⽅法实现的,⽽ master_xfer 主要是根据 struct i2c_msg 类型的msgs来进⾏处理的。
Linux_USB_gadget设备驱动

利用 Linux USB gadget 设备驱动可以实现一些比较有意思的功能,举两个例子: 1、一个 嵌入式产品中的某个存储设备,或是一个存储设备的某个分区,可以作为一个 U 盘被 PC; 设别,从而非常方便的完成文件交互,这个功能被广泛的应用于手机、数码相机等产品中。 2、一个嵌入式设备通过 USB 连接到你的 PC 后,在你的 PC 端会出现一个新的网络连接,在 嵌入式设备上也会有一个网卡设备,你可以配置它们的 IP 地址,并进行网络通讯,俗称 US BNET。
{ int rc; udelay(800);
…… }
配置内核支持 U 盘模拟
<*> USB Gadget Support --->
USB Peripheral Controller (S3C2410 USB Device Controller) --->
S3C2410 USB Device Controller
};
static struct platform_device *smdk2410_devices[] __initdata = { …,
&s3c_device_usbgadget, /*USB gadget device 设备登记*/ };
static void __init sdmk2410_init(void) { u32 upll_value; set_s3c2410fb_info(&smdk2410_lcdcfg); s3c24xx_udc_set_platdata(&smdk2410_udc_cfg); /* 初始化*/ s3c_device_sdi.dev.platform_data = &smdk2410_mmc_cfg; /* Turn off suspend on both USB ports, and switch the * selectable USB port to USB device mode. */
linux 安装virtio驱动的方法
linux 安装virtio驱动的方法一、什么是virtio驱动virtio驱动是一种用于虚拟化环境中的通用驱动程序,它提供了一种标准的接口,使得虚拟机可以与宿主机之间进行高效的数据传输和通信。
virtio驱动支持各种不同的设备类型,如网络适配器、磁盘控制器等,可以提高虚拟机的性能和稳定性。
二、安装virtio驱动的准备工作在安装virtio驱动之前,需要先准备以下工作:1. 确认虚拟化环境:确保已经在虚拟机中安装了KVM或者其他虚拟化软件,并且虚拟机已经开启了virtio设备的支持。
2. 下载virtio驱动:从官方网站或其他可信来源下载virtio驱动的安装包,一般以ISO镜像的形式提供。
三、安装virtio驱动安装virtio驱动的具体步骤如下:1. 将virtio驱动ISO镜像挂载到虚拟机中,可以通过以下命令挂载: ```# mount /dev/cdrom /mnt```其中,/dev/cdrom是ISO镜像所在的设备,/mnt是挂载点。
2. 进入virtio驱动的安装目录,一般是/mnt目录,可以通过以下命令进入:```# cd /mnt```3. 根据需要安装相应的virtio驱动,如网络适配器驱动、磁盘控制器驱动等。
执行以下命令安装网络适配器驱动:```# ./install.sh -n```执行以下命令安装磁盘控制器驱动:```# ./install.sh -d```其中,-n表示安装网络适配器驱动,-d表示安装磁盘控制器驱动。
根据实际需要选择对应的选项。
4. 完成安装后,重新启动虚拟机以使驱动生效。
四、验证virtio驱动是否安装成功安装完成后,可以通过以下方法验证virtio驱动是否成功安装:1. 检查设备:执行以下命令查看是否存在virtio设备:```# lspci | grep Virtio```如果输出中存在virtio设备,则说明驱动安装成功。
2. 检查驱动模块:执行以下命令查看是否加载了virtio驱动的模块: ```# lsmod | grep virtio```如果输出中存在virtio驱动的模块,则说明驱动加载成功。
Linux设备驱动之IIO子系统——IIO框架数据读取
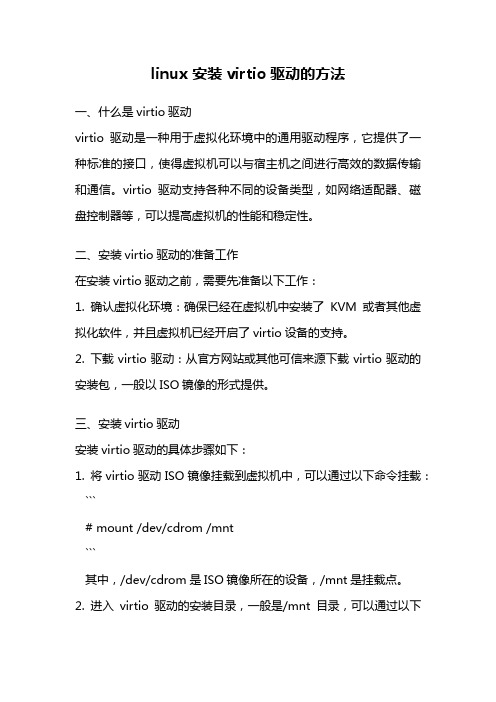
Linux设备驱动之IIO⼦系统——IIO框架数据读取IIO DATA ACCESS IIO数据获取 只有两种⽅法可以使⽤IIO框架访问数据; 通过sysf通道进⾏⼀次性捕获,或通过IIO字符设备进⾏连续模式(触发缓冲)。
One-shot capture:单次获取 ⼀次性数据捕获通过sysfs接⼝完成。
通过读取与通道对应的sysfs条⽬,您将仅捕获特定于该通道的数据。
给定⼀个带有两个通道的温度传感器:⼀个⽤于环境温度,另⼀个⽤于热电偶温度:# cd /sys/bus/iio/devices/iio:device0# cat in_voltage3_raw6646# cat in_voltage_scale0.305175781 通过将⽐例乘以原始值来获得处理值。
Voltage value: 6646 * 0.305175781 = 2028.19824053 器件数据表说过程值以mV给出。
在我们的例⼦中,它对应于2.02819V。
Buffer data access:缓冲区数据获取 要使触发的采集⼯作,必须在驱动程序中实现触发器⽀持。
然后,要从⽤户空间内获取数据,必须:创建触发器,分配它,启⽤ADC 通道,设置缓冲区的维度,并启⽤它。
这⾥主要介绍两种:sysfs触发器和hrtimer触发器。
使⽤sysfs触发器获取: 使⽤sysfs触发器捕获数据包括发送⼀组命令少量sysfs⽂件。
让我们列举⼀下我们应该做些什么来实现这⼀⽬标:1. 创建触发器:在将触发器分配给任何设备之前,应该创建它:# echo 0 > /sys/devices/iio_sysfs_trigger/add_trigger这⾥,0对应于我们需要分配给触发器的索引。
在此命令之后,触发器⽬录将在/ sys / bus / iio / devices /下作为trigger0。
2. 将触发器分配给设备:触发器由其名称唯⼀标识,我们可以使⽤该触发器将设备绑定到触发器。
ARM-Linux-ⅡC设备的添加与驱动实现

般 地 , R Ln x 作 系 统 提 供 有 实 现 了 I 内核 框 A M— i 操 u I C
{ u s ndi ; nindca u 0 ; ni e td u s e h r g1】 g nf g b
f d=o e (/ e/ c 1 , _ D p n ” vi - ” O R WR) d 2 ; i !f ) e r ; f( d rt nO u i t f , 2 — L V 0 5 ) / 设 置从 机 设 备 地 址 o l d IC S A E, x 8 ; / c( i f f , 2 ቤተ መጻሕፍቲ ባይዱ I O T ) / 设 置 超 时 值 o l d IC T ME U ,1 ; / c(
优 势和 不 足 。
关 键 词 : I 内核 与 适 配 ;I I C I C设 备 ; I I C客 户 与 驱 动 ; I I C算 法 与 适 配 驱 动 ; 测驱 动 探
中图 分 类 号 : P 6 T 3 文献标识码 : A 文章 编 号 :1 7 ~ 2 6 2 1 ) 0 0 1一 6 64 6 3 (0 2 1— l0 o
iclf 2 — T E o t(d,IC RE RI S,1 ; /设 置 重 试 次 数 )/
架 的 ici — 0e 2/ c cr. 件 及 其 包 括 G I 2 e文 PO模 拟 I I C在 内 的 常用
I I C各 类 通 信 算 法 ( 目录 i / gs ) 还 有 适 用 于 大 多 数 在 2 a o/ , cl 下 I I 设 备 的 ic2 — e. 件 。针 对具 体 的 A M 内核 微 处 C从 2/ c dv i C文 R
w i ( , u , ) / FD 卡 标 识 字 节 设 置 r e f b r 4 ;/ R I t d ra ( , u , ) , ed f b r 3 ; / d 回读 , 判 断设 置是 否 成 功 以 c s ( ) rtm ; l ef ; e o d u 0
linux系统下安装显卡驱动程序

前言:当用户执行下列操作有不能执行的时候或许是权限不够。
遇到这个问题可以用命令:[ilykty@bogon ~] su root #切换到root用户password : 输入root密码[root@localhost ~] chmod 777 文件名赋予文件最大权限。
linux 安装显卡驱动程序:1、百度输入nvidia or amd 找到官网2、在官网中找到显卡驱动程序(包括显卡型号、操作系统位数)如下图3、点击搜索、进入下载页面。
但是有时候会出现网页。
可能因为31M太大,网页会出现未能响应的情况。
所以在点前一个按钮的时候可以选择右键。
使用迅雷下载连接4、复制下载包到linux 目录下面。
可以用u盘考,推荐使用winSCP 工具。
这个在windows和linux系统直接传送文件还是很好用的。
当然还有好用的远程执行linux 命令的工具——putty(1-4步是在windows系统下完成的)5、linux下切换到命令行页面:init 36、执行安装命令[root@localhost ~] sh NVIDIA-Linux-x86-,系统弹出安装页面如果出现错误报警如:unable to find the development tool 'cc' in your path 需要安装GCC 。
错误原因是我这里没有安装gcc 编译器。
如果没有报错请跳过番外篇1和番外篇2番外篇1:关于gcc编译器gcc 是什么呢?我的理解是一个编译器。
来运行nvidia 编写的显卡驱动程序。
后来我在安装配置tomcat6服务的时候,我发现如果没有安装gcc也不能执行/etc/init.d/tomcat6的文件。
关于怎么安装tomcat6并配置成开机启动的服务我将在下一篇百度文库中介绍。
---------------------------------------------------------------------------------------------在debian系统中有这样的解决方法:一、下载NVIDIA-Linux-x86-二、sh NVIDIA-Linux-x86-1、报错:没安装binutils,apt-get intall binutils2、报错:No precompiled kernel interface was found to match your kernel..apt-get install3、上一步安装后仍然报错,继续往下走:unable to find the development tool 'cc' in your path;please make sure that you have the package 'gcc' installed.If gcc is installed on your system,then please check that 'cc' is in your PATH.apt-get install gcc4、unable to find the development tool 'make' in your path……apt-get install make5、继续:The compiler used to compile the kernel (gcc 4.1) does not exactly match thecurrent compiler (gcc 4.2). The Linux 2.6 kernel module loader rejects kernel modules built with a version of gcc that does not exactly match that of the compiler used to build the running kernel.---------------------------------------------------------------------------------------------------------------------但是我的并不是德班的系统。
linux 开发新驱动步骤

linux 开发新驱动步骤Linux作为一款开源的操作系统,其内核源码也是开放的,因此,许多开发人员在Linux上进行驱动开发。
本文将介绍在Linux上进行新驱动开发的步骤。
第一步:确定驱动类型和接口在进行驱动开发前,需要确定驱动类型和接口。
驱动类型包括字符设备驱动、块设备驱动、网络设备驱动等。
接口包括设备文件、系统调用、ioctl等。
根据驱动类型和接口的不同,驱动开发的流程也有所不同。
第二步:了解Linux内核结构和API驱动开发需要熟悉Linux内核的结构和API。
Linux内核由许多模块组成,每个模块都有自己的功能。
API是应用程序接口,提供了许多函数和数据结构,开发人员可以使用这些函数和数据结构完成驱动开发。
第三步:编写驱动代码在了解了Linux内核结构和API后,就可以编写驱动代码了。
驱动代码需要按照Linux内核的编码规范编写,确保代码风格统一、可读性好、可维护性强等。
在编写代码时,需要使用API提供的函数和数据结构完成相应的功能。
第四步:编译驱动代码和内核模块驱动代码编写完成后,需要编译成内核模块。
编译内核模块需要使用内核源码中的Makefile文件。
编译完成后,会生成一个.ko文件,这个文件就是内核模块。
第五步:加载和卸载内核模块内核模块编译完成后,需要加载到Linux系统中。
可以使用insmod命令加载内核模块,使用rmmod命令卸载内核模块。
在加载和卸载内核模块时,需要注意依赖关系,确保依赖的模块已经加载或卸载。
第六步:调试和测试驱动开发完成后,需要进行调试和测试。
可以使用printk函数输出调试信息,在/var/log/messages文件中查看。
测试时需要模拟各种可能的情况,确保驱动程序的稳定性和可靠性。
Linux驱动开发需要掌握Linux内核结构和API,熟悉驱动类型和接口,按照编码规范编写驱动代码,并进行编译、加载、调试和测试。
只有掌握了这些技能,才能进行高效、稳定和可靠的驱动开发。
Linux I2C设备驱动编写
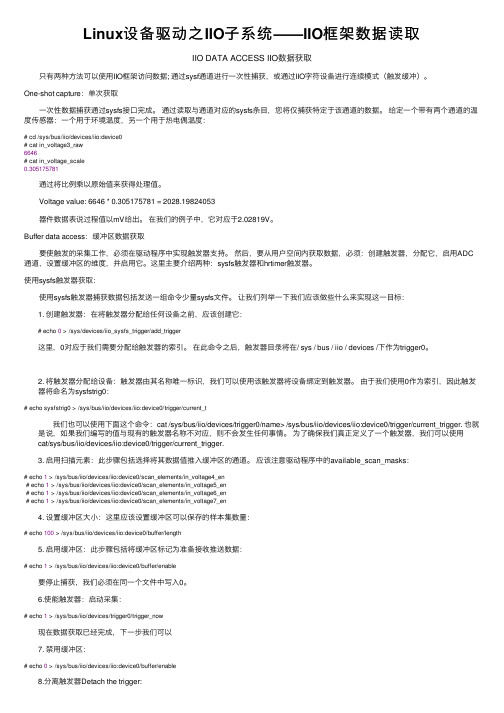
Linux I2C设备驱动编写(一)在Linux驱动中I2C系统中主要包含以下几个成员:如果一个I2C适配器不支持I2C通道,那么就将master_xfer成员设为NULL。
如果适配器支持SMBUS 协议,那么需要去实现smbus_xfer,如果smbus_xfer指针被设为NULL,那么当使用SMBUS协议的时候将会通过I2C通道进行仿真。
master_xfer指向的函数的返回值应该是已经成功处理的消息数,或者返回负数表示出错了。
functionality指针很简单,告诉询问着这个I2C主控器都支持什么功能。
在内核的drivers/i2c/i2c-stub.c中实现了一个i2c adapter的例子,其中实现的是更为复杂的SMBUS。
SMBus 与I2C的区别通常情况下,I2C和SMBus是兼容的,但是还是有些微妙的区别的。
时钟速度对比:在电气特性上他们也有所不同,SMBus要求的电压范围更低。
I2C driver具体的I2C设备驱动,如相机、传感器、触摸屏、背光控制器常见硬件设备大多都有或都是通过I2C 协议与主机进行数据传输、控制。
结构体如下:如同普通设备的驱动能够驱动多个设备一样,一个I2C driver也可以对应多个I2C client。
以重力传感器AXLL34X为例,其实现的I2C驱动为:这里要说明一下module_i2c_driver宏定义(i2c.h):module_driver():理解上述宏定义后,将module_i2c_driver(adxl34x_driver)展开就可以得到:这一句宏就解决了模块module安装卸载的复杂代码。
这样驱动开发者在实现I2C驱动时只要将i2c_driver结构体填充进来就可以了,无需关心设备的注册与反注册过程。
I2C client即I2C设备。
I2C设备的注册一般在板级代码中,在解析实例前还是先熟悉几个定义:下面还是以adxl34x为例:这样ADXL34X的i2c设备就被注册到了系统中,当名字与i2c_driver中的id_table中的成员匹配时就能够出发probe匹配函数了。
linux服务器安装网卡驱动一般步骤(总结)
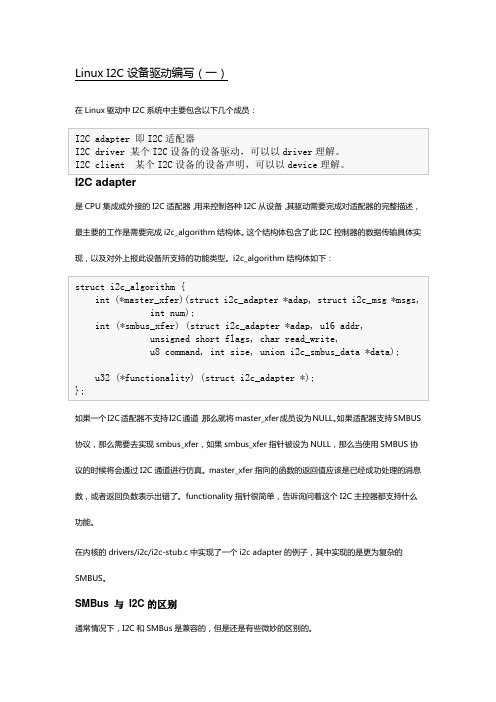
1.linux服务器安装网卡驱动一般步骤(总结)现在很多服务器安装linux可能会出现网卡,硬盘raid驱动无法等现象,现在将一般安装驱动方法介绍如下:一般服务器自带的光盘里面,有一张是专门的驱动盘。
1、将盘放入光驱2、挂载mount /dev/cdrom /mnt/cdrom 当挂载U盘时,可以到vi /etc/fstab 查看U盘的挂载属性目录3、找到驱动目录,猜测是如下目录cd /mnt/cdrom/driver/net/linux/redhat4.24、里面会有tgz后缀的文件,拷贝到rootcp 名.tgz /root5、解压编辑安装tar xvfz 名.tgzcd 名makemake install6、扫描硬件service kudzu start7、会跳出兰框,按任意键,选择configure,设置IP地址。
OK案例1:IBM X 3650 安装网卡驱动Red Hat Enterprise Linux4.2以后版本可以自动识别IBM X 3650网卡驱动,但是以前版本却不行,下面介绍低版本安装网卡驱动方法:1 Red Hat Enterprise Linux 3版本U6以上可以识别阵列卡,但是无法加载网卡驱动;如果不是U6的版本,需要手动输入linux dd加载阵列卡驱动来继续安装操作系统。
2 安装前题:在开发工具和系统内核全安装安装GCC、kernel-devel、rpmbuild 3个相关包。
说明:rpmbuild ---SRPM是RPM包source 的发布形式, 可分为包含原始代码的(src.rpm)包和不包含原始代码的(nosrc.rpm)包两种.其中,src.rpm包含原始代码也就是src.rpm类似的包都要用rpmbuild命令安装。
rpm -ivh rpm-build-4.2-1.i386.rpmrpm -ivh kernel-devel-2.6.9-5.EL.i686.rpm3、下载网卡驱动bnx2-1.4.36c-1.src.rpm,下载页面:/support/397307-AA1/more_info_local_24340.html4 安装网卡驱动rpm –ivh bnx2-1.4.36c-1.src.rpmcd /usr/src/redhatrpmbuild –bb SPECS/bnx2.specrpm -ivh RPMS/i386/bnx2-1.4.36c-1.i386.rpm --forcerpm -ivh RPMS/i386/bnx2-debuginfo-1.4.36c-1.i386.rpm --force5 reboot后机器启动到扫描新硬件时弹出配置向导,可以配置IP或者跳过此步骤进系统再用系统工具-网络设备控制来配。
精选嵌入式LINUX设备驱动程序课件

设备的控制操作
对设备的控制操作可通过文件操作数据结构中的ioctl()函数来完成。控制操作与具体的设备有密切关系,需要根据设备实际情况进行具体分析。
设备的轮询和中断处理
轮询方式对于不支持中断的硬件设备,读写时需要轮流查询设备的状态,以便决定随后的数据操作。如果轮询处理方式的驱动程序被链接到内核,则意味着查询过程中,内核一直处于闲置状态。解决办法是使用内核定时器,进行定期查询。
主设备号与次设备号
次设备号用于标识使用同一设备驱动程序的不同硬件,并仅由设备驱动程序解释 当应用程序操作某个设备文件时,Linux内核根据其主设备号调用相应的驱动程序,并从用户态进入内核态驱动程序判断次设备号,并完成相应的硬件操作。
用户空间和内核空间
Linux运行在2种模式下内核模式用户模式内核模式对应内核空间,而用户模式对应用户空间。驱动程序作为内核的一部分,它对应内核空间,应用程序不能直接访问其数据,
帧缓冲设备驱动程序
LCD分类
LCD可由为液晶照明的方式有两种:传送式和反射式传送式屏幕要使用外加光源照明,称为背光(backlight),照明光源要安装在LCD的背后。传送式LCD在正常光线及暗光线下,显示效果都很好,但在户外,尤其在日光下,很难辩清显示内容。 反射式屏幕,则不需要外加照明电源,使用周围环境的光线(或在某些笔记本中,使用前部照明系统的光线)。这样,反射式屏幕就没有背光,所以,此种屏幕在户外或光线充足的室内,才会有出色的显示效果,但在一般室内光线下,这种显示屏的显示效果就不及背光传送式的。
文件操作结构体的主要函数
open: 用于打开文件设备release: 在关闭文件的调用read: 用于从设备中读取数据write: 向设备发送数据poll: 查询设备是否可读或可写ioctl: 提供执行设备特定命令的方法fasync: 用于设备的异步通知操作
Linux系统如何安装声卡驱动

Linux系统如何安装声卡驱动有时候,装了某个软件或驱动后,破坏了声卡本身的驱动程序,这时候可能通过重装声卡驱动来解决。
就让店铺来告诉大家Linux系统如何安装声卡驱动的方法吧,希望对大家有所帮助。
Linux系统安装声卡驱动方法一Linux下安装声卡驱动,用的是alsa,它就好像是万能的一样,可以支持很多类型的声卡,如:这里更麻烦的是,alsa里面有三个东西,一个是alsa-driver;一个是alsa-lib;最后一个是alsa-untils。
安装步骤:1、把前面的三个东西给解压出来,解压之后会产生文件夹,比如:文件夹——alsa-driver、alsa-lib、alsa-untils2、打开终端,先进入alsa-driver文件夹,然后输入……34小项不要之外,一切照旧。
4、进入alsa-untils文件夹,一切同第三项。
上面的都操作完之后接着就是修改系统文件了。
在/ect目录下有一个moudules.conf的文件,在里面加入:查过之后,有一张表可以对照,如下:根据自己的实际情况然后修改自己的把snd-xxxx改成相对应的名称。
好了保存重启,一般就OK了第一次操作很麻烦,但习惯了会觉得那是一种乐趣的,至少我自己是这么觉得的。
注:如果是初次操作,需要修改到系统本身的一些东西的话,建议最好先备份,错了改过来就比较容易点,备份,其实就是复制一份同样的东西到另一个安全的地方。
Linux系统安装声卡驱动方法二环境 ubuntu12.04因为桌面版的默认装了,而且调声音也很方便,这里说一下server版下的配置,毕竟做开发经常还是用server版的1.安装apt-get install alsa-base 它会把alsa-utils也一块装了,这是个工具包,如果没装的话直接 apt-get install alsa-utils2.配置在server版下装完alsa后声音默认是静音的执行 alsamixer 会出现一个图形界面会看到有的是 MM 有的是OO 用“m”键切换时静音还是打开,一般设置 Master 和 PCM 就可以了,其他的自己看着办就行了,千万不要被图片误导了,前两个一定要设置为OO!!。
实验七 添加设备驱动_计算机操作系统实验指导(Linux版)_[共4页]
![实验七 添加设备驱动_计算机操作系统实验指导(Linux版)_[共4页]](https://img.taocdn.com/s3/m/38a4efb5caaedd3383c4d3ff.png)
110 分是关于中断次数的。
这一部分中记录了从系统启动后到当前时刻发生的系统中断的总次数,以及各类中断分别发生的次数。
这一部分以关键字intr 开头,紧接着的一项是系统发生中断的总次数,之后依次是0 号中断发生的次数,1 号中断发生的次数……其中缺页中断是第14号中断,也就是在关键字intr 之后的第16 项。
该实验可以利用stat 文件提供的数据,在一段时间的开始时刻和结束时刻分别读取缺页中断发生的次数,然后做一个减法操作,就可以得出这段时间内发生缺页中断的次数。
由于stat文件的数据是由系统动态更新的,过去时刻的数据是无法采集到的,所以这里的开始时刻最早也只能是当前时刻,实验中采用的统计时间段就是从当前时刻开始的一段时间。
2.统计缺页中断次数由于每发生一次缺页,都要进入缺页中断服务函数do_page_fault 一次,所以可以认为执行该函数的次数就是系统发生缺页的次数。
因此可以定义一个全局变量pfcount 作为计数变量,在执行do_page_fault时,该变量值加1。
经历的时间可以利用系统原有的变量jiffies。
这是一个系统的计时器,在内核加载完以后开始计时,以10ms(默认)为计时单位。
借助/proc文件系统来读出变量的值。
在/proc文件系统下建立目录pf,以及在该目录下的文件pfcount 和jiffies。
实验提示请参阅2.5节内存管理完成该实验。
实验七 添加设备驱动实验目的(1)了解Linux设备驱动的管理方式。
(2)了解Linux设备驱动程序的组织结构和设备管理机制。
(3)掌握Linux设备驱动程序的编写方法和过程。
(4)掌握Linux设备驱动程序的加载方法。
实验内容(1)编写字符设备驱动程序,要求能对该字符设备执行打开、读、写、I/O控制和关闭5个基本操作。
(2)编写块设备驱动程序,要求能对该字符设备执行打开、读、写、I/O控制和关闭5个基本操作。
(3)编写一个应用程序,测试添加的字符设备和块设备驱动程序的正确性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
为Android内核添加新驱动
作者:华清远见| 出处:博客园| 阅读175次2011/11/25 10:05:37 作者:苗德行,华清远见嵌入式培训中心讲师。
为Android内核添加新驱动,并提供menuconfig选项
为Android的Linux内核2.6.35添加驱动。
1. 在drives目录下添加hello目录,内含hello.c Kconfig Makefile
hello.c内容:
#in clude <linux/init.h>
#include <linux/module.h>
MODULE_LICENSE("Dual BSD/GPL");
static int hello_init(void)
{
printk(KERN_ALERT"Hello, world\n");
return 0;
}
static void hello_exit(void)
{
printk(KERN_ALERT"Goodbye, world\n");
}
module_init(hello_init);
module_exit(hello_exit);
Kconfig内容:
config HELLO
tristate "Hello Driver added by Farsight"
default n
help
test for adding driver to menuconfig.
MakeFile内容:
obj-$(CONFIG_HELLO) += hello.o
2. 上面的Kconfig文件再加上下面的两个配置,可使hello项出现在配置菜单中。
在arch/arm/Kconfig menu "Device Drivers" endmenu之间添加:
source "drivers/hello/Kconfig"
在drivers/Kconfig menu "Device Drivers" endmenu之间添加:
source "drivers/hello/Kconfig"
3.修改Drivers目录下的Makefile文件,添加如下行:
obj-$(CONFIG_HELLO) += hello/
当CONFIG_HELLO为y或m时,使系统能找到hello驱动的makefile。
linux-2.6.35目录下make menuconfig,在Device Drivers菜单下选中Hello Driver a dded by Farsight项比如M,作为module。
然后保存配置,执行make命令,就可以看到CC [M] drivers/hello/hello.o 的log了,hello目录里生成了hello.o hello.ko的等文件。