附合导线坐标计算表(多行)
附合导线测量的内业计算

第三节 导线测量的内业计算导线测量内业计算的目的就是计算各导线点的平面坐标x 、y 。
计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。
然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。
一、坐标计算的基本公式 1.坐标正算根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。
如图6-10所示,已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。
直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。
由图6-10可看出坐标增量的计算公式为:y图6-10坐标增量计算⎭⎬⎫=-=∆=-=∆AB AB A B AB AB AB A B AB D y y y D x x x ααsin cos (6-1)根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。
坐标增量正、负号的规律如表6-5所示。
⎭⎬⎫+=∆+=+=∆+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x ααsin cos (6-2)例6-1 已知AB 边的边长及坐标方位角为456380m 62.135'''︒==AB AB D α,,若A 点的坐标为m 82.658m 56.435==A A y x ,,试计算终点B 的坐标。
解 根据式(6-2)得m 62.792456380sin m 62.135m 82.658sin m 68.457456380cos m 62.135m 56.435cos ='''︒⨯+=+=='''︒⨯+=+=AB AB A B AB AB A B D y y D x x αα2.坐标反算根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。
测量,闭合导线等计算及表格
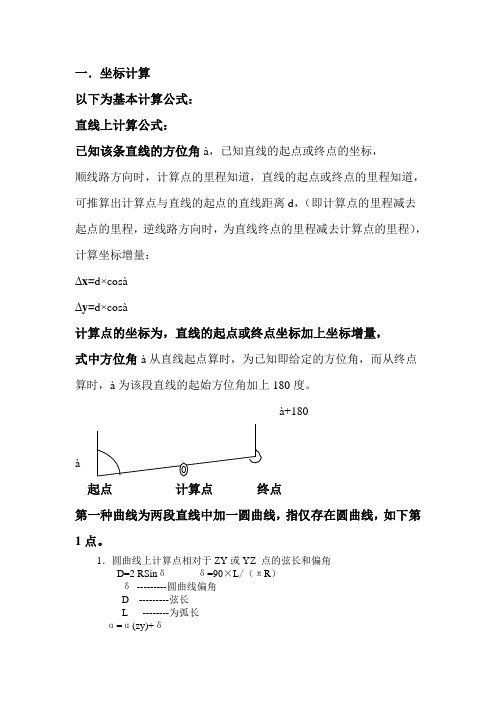
一.坐标计算以下为基本计算公式:直线上计算公式:已知该条直线的方位角à,已知直线的起点或终点的坐标,顺线路方向时,计算点的里程知道,直线的起点或终点的里程知道,可推算出计算点与直线的起点的直线距离d,(即计算点的里程减去起点的里程,逆线路方向时,为直线终点的里程减去计算点的里程),计算坐标增量:∆x=d×cosà∆y=d×cosà计算点的坐标为,直线的起点或终点坐标加上坐标增量,式中方位角à从直线起点算时,为已知即给定的方位角,而从终点算时,à为该段直线的起始方位角加上180度。
à+180à起点计算点终点第一种曲线为两段直线中加一圆曲线,指仅存在圆曲线,如下第1点。
1.圆曲线上计算点相对于ZY或YZ 点的弦长和偏角D=2 RSinδδ=90×L/(πR)δ---------圆曲线偏角D ---------弦长L --------为弧长α=α(zy)+δα------------为计算点的方位角,此α为顺着线路方向计算时。
α=α(yz)-δα------------为计算点的方位角,此α为逆着线路方向计算时。
α(zy)、α(yz)---------为圆曲线的起始方位角。
一般为已知。
计算点相对与直圆点或圆直点的坐标增量:△x=D*COSα△y=D*SINα坐标增量计算完毕后,要算某一点的坐标,用直圆点或圆直点的坐标加上计算点与直圆点或圆直点的坐标增量,即为计算点的坐标。
缓和曲线同理。
第二种曲线为两段直线中始端加一缓和曲线,末端加一缓和曲线,两段缓和曲线中加一圆曲线,如下第2点。
2.缓和曲线上计算点相对于HY或YH点的弦长和偏角δ=L²/6RL0X1=L-(L^5/40R²L0²)Y1=L³/6RL0D=√(X1²+Y1²)α=α(hy)+δα------------为计算点的方位角,此α为顺着线路方向计算时。
坐标正反算及附合导线测量的内业计算
坐标正反算及导线测量的内业计算导线测量内业计算的目的就是计算各导线点的平面坐标x、y。
计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。
然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。
一、坐标计算的基本公式1.坐标正算根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。
如图6-10所示,已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。
直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。
由图6-10可看出坐标增量的计算公式为:⎭⎬⎫=-=∆=-=∆AB AB A B AB AB AB A B AB D y y y D x x x ααsin cos (6-1) 根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。
坐标增量正、负号的规律如表6-5所示。
表6-5 坐标增量正、负号的规律y图6-10 坐标增量计算则B 点坐标的计算公式为:⎭⎬⎫+=∆+=+=∆+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x ααsin cos (6-2) 例6-1 已知AB 边的边长及坐标方位角为456380m 62.135'''︒==AB AB D α,,若A 点的坐标为m 82.658m 56.435==A A y x ,,试计算终点B 的坐标。
解 根据式(6-2)得m 62.792456380sin m 62.135m 82.658sin m 68.457456380cos m 62.135m 56.435cos ='''︒⨯+=+=='''︒⨯+=+=AB AB A B AB AB A B D y y D x x αα2.坐标反算根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。
附合导线以及闭合导线方位角计算
123 30
18
284
36
12
112
+12 22 24
112
22
341
36
05
54
115.10 100.09 108.32
94.38 67.58
-2 +2
536.27 328.74 A
+75.93 +86.50 +75.91 +86.52
-2 +2
612.18 415.26
1
-66.54 +74.77 -66.56 +74.79
来依次计算各导线点的坐标。
1
x2 x1 xˆ12 y2 y1 yˆ12
1
970300
484318 A1
A
XA=536.27m
A
1122224
2
1051706
YA=328.74m
1233006
4 1014624
4
3
3
例题:闭合导线坐标计算表
点 号
转折角 (右)
改正后 方向角 转折角
边长 D
-2 +2
545.62 490.05
2
-97.04
-2
-48.13
+1
-97.06
增量。见图有:
X
XAB =DAB cos AB YAB =DAB sin AB
其中,ΔXAB=XB-XA ΔYAB=YB-YA
YAB
XAB AB
DAB
A
0
B
y
3、坐标反算公式
由A、B两点坐标来计算αAB、DAB
DAB
x
2 AB
1-11单导线条件平差计算--附合导线坐标条件方程
平差值条件方程: ALˆ A0 0
改正数条件方程: AV W 0
STEP1
表达成角度和边
长平差值的形式
STEP2
表达成角度和边
长改正数的形式
附合导线坐标条件方程
1、纵坐标附合条件方程式
xˆN 1 xC 0
STEP1
xˆN 1 xB [xˆi ]1N
xˆi Sˆi cosTˆi
3
N
SN-1
SN
D
TCD
βN+1
C (N+1)
纵坐标符合条件方程式就是:xˆN 1 xC 0 横坐标符合条件方程式就是:yˆ N 1 yC 0
B点坐标的已知值 (xB , yB ) 或 (x1, y1)
C点坐标已知值
(xC , yC ) 或 (xN 1, yN 1)
C点坐标观测值
A
D
β2
β4
βN
2
4
β1 S1 S2 β3 S3
N
SN-1
SN βN+1
3
B(1)
附合导线示例图
C(N+1)
附合导线坐标条件方程
补充:具体计算时的单位选取
如果x、y 以米为单位,w、vS 以厘米为单位、vβ 以秒为单位。
[cos Ti
vSi
]1N
1
[( yN 1
yi )vi
]1N
STEP2
表达成角度和边 长改正数的形式
xˆN 1 xB [xˆi ]1N
xˆi Sˆi cosTˆi
非线性从这个式子着手!!
Tˆi TAB ˆ j
i
180
附合导线坐标调整法
D一、用盘左盘右测导线右角(如为左角则可转换成右角,右角=360-左角)二、推算导线方位角αB1=αAB-(β1-180)=αAB+180-β1α12=αB1+(180-β2)=αB1+180-β2α23=α12-(β3-180)=α12+180-β3 。
αCD’=αAB+n·180-∑β右测(αCD’为根据右角推算出的实测方位角)三、方位角及闭合差调整表示,理论方位角可根据两导线CD的理论方位角与推算出来的方位角之差叫闭合差,用fβ点坐标反算求得。
=αAB-αCD’+n·180实测右角∑β右测=αAB-αCD+n·180理论右角∑β右理闭合差=实测值-理论值=αCD-αCD’fβ限=±30√n(n为右角个数,包括两个联接角β1和β5)=αCD-αCD’如在限差范围之内,则进行调整,fβ调整数为:-(f/n),余数分配到短边中。
β四、坐标增量闭合差的计算与调整。
B、C为高一级精度的导线点,其横纵坐标之差即为理论坐标增量。
坐标增量的计算公式:△X12= D12·cosα12△Y12= D12·sinα12∑△X=X C-X B∑△Y理=Y C-Y B理横坐标闭合差f X=∑△X计-∑△X理=∑△X计-(X C-X B)纵坐标闭合差f Y=∑△Y计-∑△Y理=∑△Y计-(Y C-Y B)f=√f X2+f Y2闭合差K≤1/2000K=1/(D/f)(D为导线边总长)如在允许范围内,则调整闭合差。
调整原则:将增量闭合差f X、f Y以相反符号与边长(Di)成正比例分配到各边增量中。
V xi=-(f x/∑D·Di)V yi=-(f y/∑D·Di)∑D—导线边总长Di—要改正边边长V xi—要改正边横坐标增量改正数Vy i—要改正边纵坐标增量改正数。
导线测量计算及计算表格

f 测 理
其中, 理的计算公式如下:
左角:终 始 理(左) n 180 理(左) 终 始 n 180
右角:终 始 理(右) n 180 理(右) 始 终 n 180
பைடு நூலகம்
增量。
1
Vxi
f
x
D
Di
Vyi
f
y
D
Di
xˆi x Vxi yˆi x Vyi
1
970300
484318 A1
A
XA=536.27m
A
1122224
2
1051706
2
YA=328.74m
1233006
4 1014624
4
3
3
6、坐标计算
根据起始点的已知坐标和经改正的新的坐标增量,
48 43 18
539 59 00 540 00 00
理=5400000 = 测理=60 容=405 =89
485.47 +0.09 -0.08 0
xy
= +0.09 =0.08
= x²+ y²=0.120
K = D
0
=
1 4000
<1
2000
例题:
用EXCEL程序进行闭合导线计算
(四)附合导线平差计算
四.导线的内业计算——计算各导线点的坐标
(一)几个基本公式 1、坐标方位角(grid bearing)的推算
前 后 左 180
或:
前 后 右 180
注意:若计算出的方位角>360°,则减去360°; 若为负值,则加上360°。
例题:方位角的推算
2
2
已知:α12=300,各观测角β
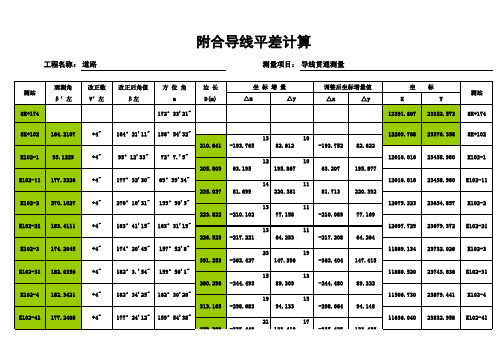
附合导线平差计算表Excel自动计算表
11270.681 24706.246
11211.861 24741.602
11238.320 24936.376
11208.067 23973.589
测站 5K83 K127-1 K127-2 K127-3 K127-4 K127-5 K127-6 K127-7 K127-8 K127-9
工程名称: 道路
+4" 182°34'25" 162°30'26"
19
15
11506.730 23879.441 K102-4
313.165 -298.683
94.133
-298.664 94.148
+4"
177°24'12" 159°54'38"
21
17
11636.040 23832.958 K102-41
359.309 -337.448
123.418
-337.427 123.435
工程名称: 道路
附合导线平差计算
测量项目: 导线贯通测量
测站 5K83 K127-1 K127-2 K127-3 K127-4 K127-5 K127-6 K127-7 K127-8 K127-9
观测角 β′左 107.4607 248.4949 86.5455 140.4210 205.5947 273.5659 184.5452 113.1617 104.2801 316.0757
+4" 164°21'11" 156°54'32"
13
10
12209.768 23376.358 8K+102
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3374617.596 3374009.738
457920.343 458454.848
151.190958
计算:
复核:
监理:
附合导线坐标计算表
5 单位名称: 工程名称: 序号
23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44
Y
458601.657 458454.848
观测左角值 (d.ms)
改正后左角值 (°′″)
坐标方位角 (°′″)
347°10ˊ06″ 347°10ˊ06″ 323°24ˊ46″ 306°46ˊ26″ 344°27ˊ07″ 167°21ˊ16″ 138°40ˊ26″
边长(m)
计算坐标增量(m) △x △y
附合导线坐标计算表
5 单位名称: 工程名称: 序号
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22
**集团有限公司 **路线**标段 已知点坐标(m) X
3373365.212 3374009.738
点号或 点名
CPII-37 CPI-9 LT-06 LT-07 JM-18 CPII-36 CP1-9
5 单位名称: 工程名称: 序号
45 46 47 48 49 50
∑ 691°30ˊ18.91″ 691°30ˊ20.94″ Σd 1257.914 607.864 -534.498
**集团有限公司 **路线**标段 已知点坐标(m) X Y 观测左角值 (d.ms) 改正后左角值 (°′″) 坐标方位角 (°′″) 边长(m) 计算坐标增量(m) △x △y 改正数(m) X Y 改正后坐标增量(m) △x △y 平差后坐标(m) X Y
**集团有限公司 **路线**标段 已知点坐标(m) X Y 观测左角值 (d.ms) 改正后左角值 (°′″) 坐标方位角 (°′″) 边长(m) 计算坐标增量(m) △x △y 改正数(m) X Y 改正后坐标增量(m) △x △y 平差后坐标(m) X Y
点号或 点名
计算:
复核:
监理:
附合导线坐标计算表
改正数(m) X Y
改正后坐标增量(m) △x △y
平差后坐标(m) X
3373365.212
Y
458601.657 458454.848 458121.239 457938.006 457871.713 457920.343
156.144 163.214017 217.404058 2.540858
-0.003 -0.001 -0.001 -0.001
449.407 136.944 238.266 -216.759
-333.609 -183.233 -66.293 48.630
3374009.738 3374459.145 3374596.089 3374834.355 3374617.596
156°14ˊ40″ 163°21ˊ41″ 217°40ˊ41″ 2°54ˊ09″ 151°19ˊ10″
559.698 228.753 247.317 222.147
449.410 136.945 238.267 -216.758
-333.606 -183.232 -66.292 48.632
-0.003 -0.001 -0.001 -0.001
计算:
复核:
监理:
线坐标计算表
备注
计算:
复核:
监理:
线坐标计算表
备注
计算:
复核:
监理:
线坐标计算表
备注
K<K允=1/40000满足四 等导线精度要求!
计算:
复核:
监理:
fx=607.864-(3374617.596-3374009.738) fx=.006 fy=-534.498-(457920.343-458454.848) fy=.007 0.0073 11.2 0.00563 2
f= √(fx^2+fy^2) f= 0.009 K= ƒ/Σd 1/136386 5 K<K允=1/40000满足四 等导线精度要求!
点号或 点名
辅 助 计 算 Σfβ理= 138°40ˊ26.44″ Σfβ测= 138°40ˊ24.41″
fβ= Σfβ测-Σfβ理 fβ= -0°00ˊ02.03″ fβ限= ±5√n fβ限= ±11.2″
-0.000563558 ∑Δx理= 607.858 ∑Δy理= -534.505 fβ<fβ限=合格