07-章4基本指令1
第七章 基本指令

RI,立即复位指令 用立即复位指令访问输出点时,从指令所指出的 位开始的N个(最多为128个)物理输出点被立即复 位,同时,相应的输出映像寄存器的内容也被刷新。 用法: RI bit, N 例: RI Q0.0,1
2、逻辑与操作指令A、AN 串联触点 常开触点,使用与指令A; 常闭触点,使用与非指令AN。
网络1 LD I0.0 = Q0.0 网络2 LDN I0.1 = M0.0 = Q0.0
几点说明 LD、LDN用于将左母线与触点相连;也可以与其 他指令配合,用于其他分支回路的开始。 “=”指令用于驱动输出继电器、辅助继电器、 特殊功能寄存器、定时器及计数器等,但不能用 于驱动输入继电器。 并联的“=”指令可以连续使用任意次。 LD、LDN的操作数为I、Q、M、SM、T、C、V、S、 L “=”的操作数为Q、M、SM、T、C、V、S、L
I0.0 I0.0 T101 Q0.0 T101,#20 T101 Q0.1
梯形图
语句表
3、功能块图
采用半导体逻辑电路方
块图。 每一种功能使用一个运 算方块,其运算功能由 方块内的符号表示。 功能块图编辑器没有梯 形图中的线圈和触点, 但有与之等价的指令。
T33 I2.1 AND IN 100 PT
几点说明 A、AN指令是单个触点串联连接指令,可连续使 用。 若串联一个由多触点并联的回路,则不能用A、 AN指令,需采用逻辑块与指令ALD。 并联的“=”指令可以连续使用任意次。 A、AN指令的操作数为I、Q、M、SM、T、C、V、S、 L
3、逻辑或操作指令O、ON 单个触点并联 常开触点,用或指令O; 常闭触点,用或非指令ON。
(M)
右 母 线
Байду номын сангаас
S7-1500PLC应用技术 第4章 S7-1500 PLC的常用指令

54
Date: 2023-08-01
Page:
4.5 程序控制操作指令
• JMP(N)指令
55
Date: 2023-08-01
Page:
4.5 程序控制操作指令
• JMP_LIST指令
56
Date: 2023-08-01
44
Date: 2023-08-01
Page:
4.4 数据处理与运算指令
• 数据转换指令-取整指令
45
Date: 2023-08-01
Page:
4.4 数据处理与运算指令
• 数据转换指令-截尾取整指令
46
Date: 2023-08-01
Page:
4.4 数据处理与运算指令
• 数据转换指令-标定指令
72
Date: 2023-08-01
Page:
4.7 基本指令应用示例
• 示例2:交通灯控制系统设计
73
Date: 2023-08-01
Page:
4.7 基本指令应用示例
• 示例3:多台设备运行状态监控系统设计
1 . 控制要求 某车间排风系统,由三台风机组成,采用S7-1500 PLC控制。现要 求根据风机工作状态进行监控,并通过指示灯信号进行显示,具体控 制要求如下: 1 当系统中没有风机工作时,指示灯以2Hz频率闪烁; 2 当系统中只有1台风机工作时,指示灯以0.5Hz频率闪烁; 3 当系统中有2台以上风机工作时,指示灯常亮。 试根据以上控制要求编写风机状态监控程序。
69
Date: 2023-08-01
Page:
电气控制与PLC基本逻辑指令基础知识讲解

第一节 基本逻辑指令
四、 ORB指令
❖ ORB(Or Block):串联电路块并联连接指令
❖ 指令的说明 ➢ 串联电路块:两个或以上的触点串连而成的电路块; ➢ 将串联电路块并联时用ORB指令; ➢ ORB指令不带元件号(相当于触点间的垂直连线) ➢ 每个串联电路块的起点都要用LD或LDI指令,电路 块后面用ORB指令
第七章基本逻辑指令基础知识讲解
第一节 基本逻辑指令 第二节 编程的规则与技巧 第三节 基本逻辑指令的应用 本章小结
Date: 2023/4/17
Page: 1
第一节 基本逻辑指令
一、LD、LDI、OUT 指令 二、AND、ANI指令 三、OR、ORI 指令 四、ANB、ORB 指令 五、MPS、MRD、MPP 六、指M令C、MCR 指令 七、SET、RST 指令 八、PLS、PLF 指令 九、NOP、END 指令
K120 6 LD X2 7 OUT M8200 8 LD X3 9 RST C200 10 LD X4 11 OUT C200
K34
第一节 基本逻辑指令
九、PLF、PLS 指令
❖ 指令的作用 ➢ PLS (Pulse) :上升沿微分输出指令 ➢ PLF:下降沿微分输出指令
❖ 指令的说明 ➢ 指令只能用于编程元件Y和M ➢ PLS为信号上升沿(OFF→ON)接通一个扫描周期。 ➢ PLF为信号下降沿(ON→OFF)接通一个扫描周期。
Date: 2023/4/17
Page: 10
第一节 基本逻辑指令
三、OR、ORI 指令
❖ 梯形图程序
LD
X1
Y1
Y1
OR
M102
ORI
X1 Y1
Y2
人教版高中物理必修第一册精品课件 第二章 匀变速直线运动的研究 07-4.自由落体运动

次序
1
20.10
0.20
2
25.20
0.23
3
32.43
0.26
4
38.45
0.28
5
44.00
0.30
6
50.12
0.32
见解析图
拓展 利用自由落体运动测重力加速度的方法(忽略阻力)
_
____________________________
_
____________________________________
对点演练1 [2024盐城阜宁期中]伽利略对自由落体运动的 研究是科学实验和逻辑思维的完美结合,如图所示,可大 致表示其实验和思维的过程,对这一过程的分析,下列说 法正确的是( C ) A.丁图是实验现象,甲图是经过合理的外推得到的结论 B.甲图是实验现象,乙图是经过合理的外推得到的结论 C.运用甲图的实验,可“冲淡”重力的作用,使实验数据更容易测量 D.运用丁图的实验,可“放大”重力的作用,使实验数据更容易测量
第二章 匀变速直线运动的研究
4.自由落体运动
1 要点一 自由落体运动 2 要点二 自由落体运动的规律 3 要点三 自由落体加速度的测量
学习目标
学科核心素养
1.了解伽利略对自由落体运动 物理观念:认识自由落体运动的受力特点和运动
的研究方法,领会伽利略的 规律。
科学思想。 科学思维:分析出自由落体运动做的是匀加速直
_
___________________________________
不积跬步,无以至千里; 不积小流,无以成江海!
[解析] 甲、乙、丙图是实验现象,丁图是经过合理的外推 得到的结论,故A、B项错误;由于伽利略时代靠滴水计 时,不能准确测量自由落体所用的时间,采用从斜面滚下, 可以延长下滑所用时间,起到“冲淡”重力的作用,丁图中 自由落体的时间更难测量,故C项正确,D项错误。
第7章 S7-200系列PLC基本指令

第7章 S7-200系列PLC基本指令 S7-200系列PLC基本指令
3. 边沿触发指令(脉冲生成) 边沿触发指令(脉冲生成) (1) EU(Edge Up):上升沿微分输出指令。 (2) ED(Edge Down):下降沿微分输出指令。
第7章 S7-200系列PLC基本指令 S7-200系列PLC基本指令
例7-10 断电延时型定时器应用示例
第7章 S7-200系列PLC基本指令 S7-200系列PLC基本指令
7.1.4 定时器指令
应当注意:对于S7-200系列PLC的定时器,时基分别为1ms、 应当注意 10ms、100ms定时器的刷新方式是不同的。1ms时基定时器,每隔 1ms定时器刷新一次当前值,与扫描周期和程序处理无关,扫描周期较 长时,定时器在一个周期内可能多次被刷新,其当前值在一个周期内不 一定保持一致;10ms定时器,在每个扫描周期开始时刷新,在每个扫 描周期内,当前值不变;100ms定时器在该定时器指令执行时被刷新。
第7章 S7-200系列PLC基本指令 S7-200系列PLC基本ቤተ መጻሕፍቲ ባይዱ令
7.1.1 基本位操作指令
基本逻辑指令的语句表由指令助记符和操作数两部分组成,操作数 由可以进行位操作的寄存器元件及地址组成。常用位操作指令助计符的 定义如下所述: (1)LD(Load):装载指令,对应梯形图从左侧母线开始,连接常开 触点。 (2)LDN(Load Not):装载指令,对应梯形图从左侧母线开始,连 接常闭触点。 (3)A(And):与操作指令,用于常开触点的串联。 (4)AN(And Not):与操作指令,用于常闭触点的串联。 (5)O(Or):或操作指令,用于常开触点的并联。 (6)ON(Or Not):或操作指令,用于常闭触点的并联。 (7)=(Out):置位指令,线圈输出。
chapter_4

4.1 ARM处理器寻址方式
• 寻址方式分类——寄存器移位寻址
寄存器移位寻址是ARM指令集特有的寻址方式。 当第2个操作数是寄存器移位方式时,第2个寄存器 操作数在与第1个操作数结合之前,选择进行移位操 逻辑左移3位 作。寄存器移位寻址指令举例如下: MOV R0,R2,LSL #3 R2 0x01 ;R2的值左移3位,结果放入R0, 0x08
向上生长:向高地址方向生长,称为递增堆栈
向下生长:向低地址方向生长,称为递减堆栈
周立功单片机
4.1 ARM处理器寻址方式
• 寻址方式分类——堆栈寻址
堆栈压栈 SP栈顶 0x12345678 栈底
栈区
向上 增长
堆栈存 储区
向下 增长
栈区
栈底 0x12345678 堆栈压栈
栈顶SP
周立功单片机
LDR R1,[R2] ;将R2指向的存储单元的数据读出
SWP
R1,R1,[R2]
R2 0x40000000 ;保存在R1中 R0 0xAA 0x55
;单元的内容交换
;将寄存器R1的值和R2指定的存储
LDR
R1,[R2]
周立功单片机
4.1 ARM处理器寻址方式
• 寻址方式分类——基址寻址
基址寻址就是将基址寄存器的内容与指令中给 出的偏移量相加,形成操作数的有效地址。基址寻 址用于访问基址附近的存储单元,常用于查表、数 0x4000000C 0xAA 组操作、功能部件寄存器访问等。基址寻址指令举 例如下: 将R3+0x0C作 R3 0x40000000 LDR 为地址装载数 R2,[R3,#0x0C] ;读取R3+0x0C地址上的存储单元 R2 0xAA 0x55 据 ;的内容,放入R2
PLC基础培训教材
P L C基础培训教材(总24页) --本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--PLC编程理论与控制原理目录第一章 PLC基本工作原理1—1 基本原理 (3)1—2扫描原理 (3)1—3 I/O映象区 (3)1—4 输入输出操作 (4)1—5中断处理 (4)第二章 PLC硬件结构2—1 处理器单元 (5)2—2 EEPROM存储模块 (6)2—3 扩展单元 (7)2—4 手执式编程器 (7)2—5 安装设备—DIN道轨 (7)第三章 PLC I/O接口3—1电源电路的连接及性能 (8)3—2 接地 (8)3—3 输入输出 (9)3—4安装位置图 (10)第四章基本指令和基本逻辑说明4—1 基本逻辑指令 (11)4—2 基本逻辑指示说明 (12)第五章 PLC用户程序编程5—1 完成一个用户程序的步骤 (18)5—2 梯形图(LAD) (18)5—3 扫描周期 (19)5—4语句表(STL) (19)第一章 PLC基本工作原理PLC(Programmable Logic Controller)是目前工控的主要工具,具有高可靠性、丰富的I/O接口模块、模块化结构、编程简单、安装维护方便、系统设计和调试周期短等特点。
广泛应用于逻辑控制、计数控制、顺序控制、PID控制、数据处理、通信和联网等工业控制领域。
1 基本原理可编程序控制器要完成控制任务是在其硬件的支持下,通过执行反映控制要求的用户程序来完成的。
这一点是和计算机的工作原理一致的,所以可编程序控制器工作的基本原理是建立在计算机工作原理之上的,其实质上也是一种计算机控制系统,只不过它具有比计算机更强的与工业过程想连的接口,具有更适合用于控制要求的编程语言。
可编程序控制器的CPU是采用按顺序逐条扫描用户程序的运行方式工作的,它的输入输出是在扫描到该I/O点时才读入开关信号或刷新输出信号,考虑到继电器控制装置中各类触点的动作时间一般在100MS以上,故可编程序控制器扫描用户程序的时间一般都小于100MS。
s7-200基本指令 (1)
第四章 S7-200的基本指令4.1位操作指令位操作类指令,主要是位操作及运算指令,同时也包含与位操作密切相关的定时器和计数器指令等。
位操作指令是PLC常用的基本指令,梯形图指令有触点和线圈两大类,触点又分常开触点和常闭触点两种形式;语句表指令有与、或及输出等逻辑关系,位操作指令能够实现基本的位逻辑运算和控制。
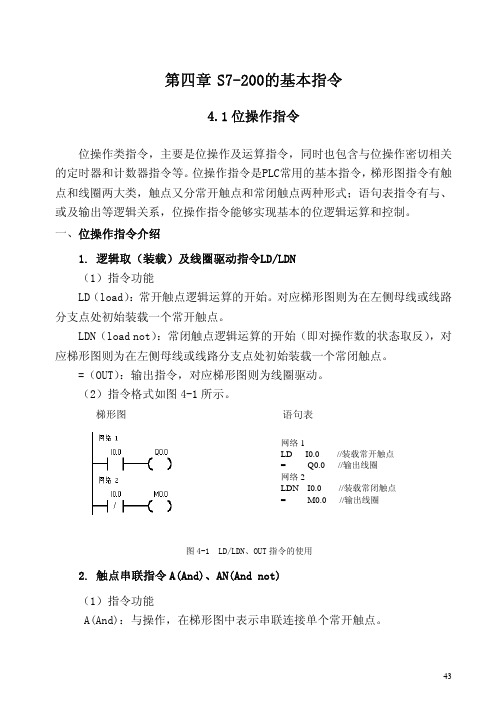
一、位操作指令介绍1. 逻辑取(装载)及线圈驱动指令LD/LDN(1)指令功能LD(load):常开触点逻辑运算的开始。
对应梯形图则为在左侧母线或线路分支点处初始装载一个常开触点。
LDN(load not):常闭触点逻辑运算的开始(即对操作数的状态取反),对应梯形图则为在左侧母线或线路分支点处初始装载一个常闭触点。
=(OUT):输出指令,对应梯形图则为线圈驱动。
(2)指令格式如图4-1所示。
梯形图 语句表网络1LD I0.0 //装载常开触点= Q0.0 //输出线圈网络2LDN I0.0 //装载常闭触点= M0.0 //输出线圈图4-1 LD/LDN、OUT指令的使用2. 触点串联指令A(And)、AN(And not)(1)指令功能A(And):与操作,在梯形图中表示串联连接单个常开触点。
AN(And not):与非操作,在梯形图中表示串联连接单个常闭触点。
(2)指令格式如图4-2所示梯形图 语句表网络1LD I0.0 //装载常开触点 A M0.0 //与常开触点 = Q0.0 //输出线圈 网络2LD Q0.0 //装载常开触点 AN I0.1 //与常闭触点 = M0.0 //输出线圈 A T37 //与常开触点 = Q0.1 //输出线圈图4-2 A/AN 指令的使用3. 触点并联指令:O(Or)/ON(Or not) (1)指令功能O:或操作,在梯形图中表示并联连接一个常开触点。
ON:或非操作,在梯形图中表示并联连接一个常闭触点。
(2)指令格式如图4-3所示梯形图 语句表图4-3 O/ON 指令的使用网络1 LD I0.0 O I0.1 ON M0.0= Q0.0 网络2LDN Q0.0 A I0.2 O M0.1 AN I0.3 O M0.2=M0.14. 电路块的串联指令ALD (1)指令功能ALD:块“与”操作,用于串联连接多个并联电路组成的电路块。
S7200系列PLC教案4章(S7-200基本指令)

第4章S7-200基本指令ON 并联一个常闭触点指令格式:ON bit(4)NOT 触点取非(输出反相)指令格式:NOT(NOT指令无操作数)(5)= 输出指令将逻辑运算结果输出到指定存储器位或输出映像寄存器,以驱动线圈指令格式:= bit在语句表中,LD、LDN、A、AN、O、ON、NOT这几条指令的执行对逻辑堆栈的影响分别如表4-2、表4-3其后的说明。
表4-2 LD I0.1指令执行对堆栈影响表4-3 指令A I0.2的执行对堆栈影响程序介绍时序图2.正负跳变指令在梯形图中以触点形式表示用于检测脉冲的正跳变(上升沿)或负跳变(下降沿)利用跳变让能流接通一个扫描周期,即可以产生一个扫描周期长度的微分脉冲。
常用此脉冲触发内部继电器线圈EU 正跳变指令正跳变触点检测到脉冲的每一次正跳变后,产生一个微分脉冲。
指令格式:EU (无操作数)ED 负跳变指令负跳变触点检测到脉冲的每一次负跳变后,产生一个微分脉冲。
指令格式:ED (无操作数)应用举例:图4-1是跳变指令的程序片断和指令执行的时序图4-1 跳变指令3.置位和复位指令置位即置1,复位即置0。
这两条指令在使用时需指明三点:操作性质、开始位和位的数量。
S 置位指令将位存储区的指定位(位bit)开始的N个同类存储器位置位指令格式: S bit, NR 复位指令将位存储区的指定位(位bit)开始的N个同类存储器位复位。
如果是对定时器T位或计数器C位进行复位,则定时器位或计数器位被复位,同时,定时器或计数器的当前值被清零。
指令格式: R bit, N指令S、R用法举例:图4-2 指令S,R用法注意:在存储区的一位或多位被置位后,不能自己恢复,必须用复位指令使之由1跳回到0。
三、复杂指令复杂逻辑指令主要用来对触点进行复杂连接,本类指令包括:ALD、OLD、LPS、LRD、LPP和LDSD OLD指令ALD,栈装载与指令(与块),在梯形图中用于并联电路块的串联连接。
S7-200plc的基本指令及编程

Q1.0=I0.0*I0.1
Q0.0(SET)=I0.0*I0.1
Q0.2-Q0.4(RESET)=I0.0*I0.1
2021/5/27
36
4.立即指令
立即指令允许对输入和输出点进行快速 和直接存取
当用立即指令读取输入点的状态时,相 应的输入映像寄存器中的值并未发生更新;
用立即指令访问输出点时,访问的同时, 相应的输出寄存器的内容也被刷新。
//使能输入端 //整数加法 //VW0+VW4=VW4
2021/5/27
9
二、梯形图的基本绘制规则
work *** Network为网络段,后面的***为网 络段编号。 2.能流/使能 在梯形图中有两种基本类型的输入输
出,一种是能量流,另一种是数据。
EN为能流输入,ENO为能流输出,均
为布尔型数据。
2021/5/27
10
3.编程顺序 梯形图按照从上到下,从左到右
的顺序绘制。 4.编号分配 对外部输入/输出设备分配编号, 编号的分配必须是主机或扩展模块 本身实际提供的,而且是用来进行 编程的。
2021/5/27
11
5.内、外触点的配合
在梯形图中选择输入继电器的触点类型(内 部触点)与两方面的因素有关: 一是输入设备的触点类型(外部触点) 二是控制电路的实际通断要求。
和S1的值进行逻辑与运 算,结果放回栈顶。即
STACK3 S3 S4 STACK4 S4 S5
S0=S0*S1=1*0=0
STACK5 S5 S6 STACK6 S6 S7
执行完本指令后堆栈串行 上移一格,深度减1
STACK7 S7 S8
STACK8 2021/5/27 S8
X
第4章功能指令

右移
左移
循环右移 循环左移
寄存器移位
1. 字节交换及填充指令
作用—字数据高低字节内容互换;字数据存储区填充。 指令
字节交换
字数据填充
4.2 运算和数学指令 1. 运算指令
作用—算术运算 指令
加法
减法
一般乘法 完全整数乘法 一 般除法 完全整数除法
1. 数学函数指令
作用—以公式计算函数值 指令
✓ 第二步,将实数格式的工程实际值转化为[0.0,1.0]之间的无量纲相对值,用 下式来完成这一过程:
RNorm=(RRaw/Span)+Offset 式中:RNorm 为工程实际值的归一化值;RRaw 为工程实际值的实数形式值, 未归一化处理。标准化实数又分为双极性(围绕0.5上下变化)和单极性(以 0.0为起点在0.0和1.0之间的范围内变化)两种。对于双极性,Offset为0.5; 对于单极性,Offset为0,Span表示值域的大小,通常单极性时取32 000, 双极性时取64 000。 ✓ 以下程序段用于将AC0中的双极性模拟量进行归一化处理(可紧接上面的程 序):
表存数指令 表取数(先进先出)指令 表取数(后进先出)指令
表查找指令
4.4 转换指令
1. 数据类型转换指令
作用—将数据转换成指令规定的格式 指令(1)
字节到整数 整数到字节 双整数到整数 整数到双整数
实数到双整数 双整数到实数 整数到实数
数据类型转换指令
指令(2):BCD码转换指令 BCD码在PLC中的应用
1. 字符串转换指令
作用
实现数值与字符串之间的转换。 (字符串为全部合法的ASCII字符串)
指令
INT →Str DINT →Str Real → Str Str →INT Str →DINT Str →Real
PLC应用技术-S7-200的基本指令
4.1 位操作类指令
3. 触点并联指令:O(Or)/ON(Or not) O:或操作,表示并联连接一个常开触点。 ON:或非操作,表示并联连接一个常闭触点。
网络1 LD I0.0 O I0.1 ON M0.0 = Q0.0
网络2 LDN Q0.0 A I0.2 O M0.1 AN I0.3 O M0.2 = M0.1
增减计数程序及时序
4.1 位操作类指令
五、比较指令
• 1. 字节比较 LDB、AB、OB • 2. 整数比较 LDW、AW、OW • 3. 双字整数比较 LDD 、AD 、OD • 4、实数比较 LDR AR OR
比较运算符 : == 等于 、〈 小于、〉大于、〈= 小于等 于、〉= 大于等于、〈〉不等于
OLD
LDN I0.4 A I0.5 OLD = Q0.0
4.1 位操作类指令
注意输出线圈不能串联
M0.0 T37
Q0.0 Q0.1
()()
4.1 位操作类指令
实验题:起动保持停止电路(起保停电路)
1
I0.0 I0.1 Q0.0
LD I0.0 起动 I0.0
0
( ) O Q0.0 停止 I0.1
难点内容:
表功能指令
4.1 位操作类指令
• 1.逻辑取(装载)指令 LD/LDN • 2. 触点串联指令 A/AN • 3. 触点并联指令 O/ON • 4. 电路块的串联指令 ALD • 5. 电路块的并联指令 OLD • 6. 置位/复位指令 S/R • 7. 边沿触发指令 EU/ED
4.1 位操作类指令
4.1 位操作类指令
控制要求: • 一自动仓库存放某种货物,最多6000箱
,需对所存的货物进出计数。货物多于 1000箱,灯L1亮;货物多于5000箱,灯 L2亮。 • 其中,L1和L2分别受Q0.0和Q0.1控制, 数 值 1000 和 5000 分 别 存 储 在 VW20 和 VW30字存储单元中。
S7-200 第4章 可编程序控制器指令1

注意:
1.定时时间=定时器的预设值(PT)*定时器的分辨 率。 2.一个定时器智能表现一种功能,不能把一个定时器 同 时 用 作 TOF 和 TON , 或 TONR , 例 如 , 不 能 既 有
TON T32又有TOF T32或TONR。同一个序号的定时器
也不能重复出现。
§ 4.3.2 计数器指令
4.4.1 传送指令
1.字节、字、双字、实数的传送指令 ·MOV为传送指令符号, 表示数据类型。
MOV _ EN ENO IN OUT
·数据类型有:字节(B)、字(W)、双字(DW)、实数 (R)。 · EN为使能端,即当EN前面的逻辑条件满足时,才能进行 数据传送。 · IN是所要传送的数据输入端。OUT是数据传输的输出端。
•在CD端,每来一个上升沿到,计数器当前值减1,当当前
值等于0时,计数器状态位被置1,计数器停止计数。 •如CD端仍有上升沿到来,当前值仍保持为0,状态位不变。 •当复位端(LD)置位时,计数器被复位,即减计数器被 装入预设值(PV),状态位清零。
减计数举例
3.加/减计数器指令(CTUD)
•兼有加计、减计数器双重功能,CU端加计数, CD端 减计数。 •当当前值大于或等于预置计数值(PV)时,计数器状 态位被置位;当前计数值小于预设值(PV)时,计数 器状态位被复位。 •当复位端(R)被接通时,计数器复位。
后,则使输出短时接通,接通时间为一个扫描周期。
2.负跳变指令
负跳变指令梯形图:┥N┝
当负跳变触点检测到又一次负跳变(从on到off)之
后,则使输出短时接通,接通时间为一个扫描周期。
正、负跳变指令举例
4.2.5 置位和复位指令 1.置位(置1)指令
置位指令(置1)是从bit指定的地址位开始的N个点 被置位,直至复位指令到来才能复位。被置位指令N的 范围是1-255。
指令系统的基本指令
PUSHF/PUSHFD
功能:将16/32位标志寄存 器的内容压入堆栈。
出栈指令POP
语句格式: POP OPD 功能: 将栈顶元素弹出送至某一寄存器、段 寄存器(除CS外)或存储器,堆栈指针加2。 从 POP 指令功能可看出,该指令为 PUSH 指令 的逆过程。 ①([SP])→(OPD)7~0 (SP)+1→SP ②([SP])→(OPD)15~8 (SP)+1→SP 目的操作数可以是16位通用寄存器、段寄存 器和存储器,但是代码段CS不能作为目的操 作数出栈指令。
(SI)=0180H,(DS)=2000H
LES DI,[BX] 设指令执行前: (DS)=0B000H,(BX)=080AH, (0B080AH)=05AEH, (0B080CH)=4000H, 问,执行后 (DI)=? (ES)=? (DS)=?
(DI)=05AEH,(ES)=4000H (DS)=0B000H
堆栈操作指令
PUSH指令 PUSHA(80286) PUSHF/ PUSHFD POP指令 POPA/ POPAD POPF/ POPFD
进栈指令PUSH
语句格式: PUSH OPS 功能:将寄存器、段寄存器或存储器中的一 个字数据压入堆栈,堆栈指针减2。 ①(SP)-1→SP (OPS)15~8→[SP] ②(SP)-1→SP (OPS)7~0→[SP] 指令的操作数:可以是16位的通用寄存器, 段寄存器和存储器。
POPF/POPFD
POPF功能:从栈顶弹出一个字送至标志寄存器 FLAGS。 POPFD 功能:从栈顶弹出一个双字送至 EFLAGS 标志寄存器。 【例】将标志寄存器的单步标志TF置位。 PUSHF ;(FLSGS)→↓(SP) POP AX ;(SP)→AX OR AX, 0100H;设置D8=TF=1 PUSH AX ;(AX)→↓(SP) POPF;(SP)→↓FLAGS,即(AX)→↓FLAGS
S7基本指令

7.1.5 并联电路块的串联指令
ALD(And Load) :用于并联电路块的串联连接 ALD指令的使用
ALD I0.0 I0.1 M0.0 M0.2 M0.1 M0.3
( )
OLD
Q0.0
LD O LD A LDN A OLD ALD =
I0.0 I0.1 M0.0 M0.1 M0.2 M0.3
S7-200系列PLC中有一个9层堆栈,用于 处理所有逻辑操作,称为逻辑堆栈。 特点:“先进后出”。 ① ALD(And Load)指令 :与块指令。 ALD指令把逻辑堆栈第一、第二级的值 作“与”操作,结果臵于栈顶。ALD执 行后堆栈减少一级。
iv0 iv1 iv2 iv3 iv4 iv5 iv6 iv7 iv8 S0=iv0*iv1
M0.1
Q0.0
( R)
1
LD I0.0 EU = M0.0 LD M0.0 S Q0.0, 1
第7章 S7-200系列PLC的基本指令
LD I0.1 ED = M0.1 LD M0.1 R
7.1.9逻辑堆栈操作指令
操作前 操作后 S0=iv0*iv1 S0 iv2 iv3 iv4 iv5 iv6 iv7 iv8
bit ( SI ) N
bit ( RI ) N
bit只能为Q 1.只能为Q N的范围:1~128 N的操作数同S/R 指令
立即臵位
立即复位
SI bit, N
RI bit, N
第7章 S7-200系列PLC的基本指令
立即指令使用
输 出 刷 新 输 入 采 样
扫描周期 n
I0.0
输 出 刷 新
输 入 采 样
栈底丢失
iv3 iv2 iv4 iv3 iv5 iv4 iv6 iv5 iv7 iv6 iv8 iv7
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
LD O A NOT =
I0.0 I0.1 I0.2 Q0.0
I0.0 I0.1 I0.2
// // //
//取非,即输出反相 Q0.3 //
Q0.3 Q0.2
•
程序对应的功能框图如图所示。在功能框图 中,常闭触点的装入和串并联用指令盒的对应 输入信号端加圆圈来表示。
LD O A = // // LDN I0.0 ON AN = // // LD O A NOT
第4章 基本指令
• 4.1 位操作类指令 • 4.2 运算指令 • 4.3 其他数据处理 指令 • 4.4 表功能指令 • 4.5 转换指令
本章学习目的
l 位操作类指令,主要是位操作及运算指令,与 时也包含与位操作密切相关的定时器和计数器 指令等。 l 运算指令,包括常用的算术运算和逻辑运算指 令。 l 其他数据处理类,包括数据的传送、移位、填 充和交换等指令。 l 表功能指令,包括对表的存取和查找指令。 l 转换指令,包括数据类型转换、码转换和字符 转换指令。
LAD
I0.0 I0.1
Q0.1 Q0.1 M0.0
LSTL LD I0.0
= Q0.0
LDN I0.1 = = Q0.1 M0.0 M0.1 Q0.2
LD M0.0
= Q0.2 ★ 说明 ⑴、梯形图构成
一行一行组成:network1,2,左边:母线
每行由LD或LDN开始(常开或常闭),以输出线圈结束 ⑵、并联输出可以多次使用
// // // // //将 Q0.0 开始的//1 //将 Q0.0 开始的//1 //将 Q0.2 开始的//3 //将 Q0.2 开始的//3
个触点置 1 个触点置 R R Q0.2, 3 Q0.2, 3 个触点置 0 个触点置
I0.0 I0.1 Q1.0 Q0.0 Q0.2-Q0.4
时序图
ON I0.2 = Q0.1
连续(纵接顺序)输出
LD I0.0
O Q0.0 A Q0.1 = Q0.0 LD I0.1
I0.0 Q0.0
Q0.1
Q0.0
I0.1 M0.3
Q0.1 I0.2 M0. 1
A
=
M0.3
Q0.1
AN I0.2 = M0.1
连续输出
说明:A、AN串联触点个数不限 O、ON并联触点个数不限 纵接顺序输出,可多次重复
I0.3
I0.1 Q0.1 Q0.0 Q0.1
I0.0 I0.1 I0.2
I0.0
Q0.0 Q0.1 Q0.0
注意情况:右图不是纵接
3、程序扫描工作方式: ⑴、1行程序中,从左至右 ⑵、多行程序中,从上到下
程序处理 输入处理时间 映象区结果:I0.0= “0”
⑶、要避免双线圈输出
⑷、程序处理过程中, 不接收输入状态变化
LD LD I0.0 I0.0 //装入常开触点 //装入常开触点 = = Q0.0 Q0.0 //输出触点,非立即 //输出触点,非立即 =I =I Q0.1 Q0.1 //立即输出触点 //立即输出触点 SI SI Q0.2, 1 1 //从 Q0.2 开始的 1 个 Q0.2, //从 Q0.2 开始的 1 //触点被立即置 1 1 //触点被立即置
ED =
I0.0I0.0
Q0.1
// // //脉冲负跳变
//脉冲负跳变 //
Q0.1
//
三、 置位和复位指令
• (1)S,置位指令 • (2)R,复位指令 置位即置1,复位即置0。置位和复位指令可以将位存储区 的某一位开始的一个或多个(最多可达255个)同类存储器 位置1或置0。这两条指令在使用时需指明三点:操作性质、 开始位和位的数量。各操作数类型及范围如表所示。
//如果本梯级中将 I0.1 的触点改 //如果本梯级中将 I0.1 的触点改 //为 Q0.0 的常开触点,则成为电 //为 Q0.0 的常开触点,则成为电 //机起动停止控制环节的梯形图。 //机起动停止控制环节的梯形图。 LDN I0.0 ON AN = LDN I0.0 //装入常闭触点 //装入常闭触点 I0.1 ON I0.2 AN Q0.1 = I0.1 //或常闭触点 //或常闭触点 I0.2 //与常闭触点 //与常闭触点 Q0.1// //
一、基本触点(逻辑)指令
• (1)LD:装入常开触点(LoaD) • (2)LDN:装入常闭触点(LoaD Not) • (3)A:与常开触点(And) • (4)AN:与常闭触点(And Not)。 • (5)O:或常闭触点(Or) • (6)ON:或常闭触点(Or Not) • (7)NOT:触点取非(输出反相) • (8)= :输出指令
2、电路块并联指令
• OLD,栈装载或指令(或块)。在梯形 图中用于将串联电路块进行并联连接。
串联电路块的并联例 语句表
Net work LD I 0.0 A M 0.3 LDN M 0.3 A I 0.1 OLD LD M 0.3 AN I 0.2 OLD = Q 0.0 I0.0
4.1.1 基本逻辑指令
• 基本逻辑指令在语句表语言中是指对位存储单 元的简单逻辑运算,在梯形图中是指对触点的 简单连接和对标准线圈的输出。 • 一般来说,语句表语言更适合于熟悉可编程序 控制器和逻辑编程方面有经验的编程人员。用 这种语言可以编写出用梯形图或功能框图无法 实现的程序。选择语句表时进行位运算要考虑 主机的内部存储结构。
4、RI,立即复位指令 • 用立即复位指令访问输出点时,从指令所指 出的位(bit)开始的N个(最多为128个)物 理输出点被立即复位,同时,相应的输出映 像寄存器的内容也被刷新。 • 用法: RI bit, N • 例: RI Q0.0,1 • 应用举例: • 立即指令应用中的一段程序和程序对应的时 序图。
四 、立即指令 • • • • (1)立即触点指令 (2)=I,立即输出指令 (3)SI,立即置位指令 (4)RI,立即复位指令
1、立即触点指令 • 在每个标准触点指令的后面加“I”。指 令执行时,立即读取物理输入点的值, 但是不刷新对应映像寄存器的值。 • 这类指令包括:LDI、LDNI、AI、ANI、 OI和ONI。下面以LDI指令为例。 • 用法: LDI bit • 例: LDI I0.2 • 注意:bit只能是I类型。
LDI LDI = =
I0.0 I0.0 Q0.3 Q0.3
//立即输入触点指令 //立即输入触点指令 // //
立即指令程序
输出刷新
输出刷新 扫描周期 n 输入扫描
输出刷新
输出刷新
输出刷新
扫描周期 n+1 输入扫描
扫描周期 n+2 输入扫描
扫描周期 n+3 输入扫描 输入扫描
I0.0 Q0.0 Q0.1 Q0.2 Q0.3
置位指令、复位指令用法
S-BIT
S N S-BIT
从S-BIT开始的N个元件置1
R N
从S-BIT开始的N 个元件清0
I0.0
I0.1
Q0.3 S k2 Q0.3 R K2
I0.0 Q0.3 Q0.4 I0.1
例:
I0.0 P M0.0 Q0.0 S K1 M0.1 N M0.0 I0.0 M0.0 I0.1 M0.1 Q0.0
4、程序实例: • 本程序段用以介绍标准触点指令在梯形图、语句 表和功能块图3种语言编程中的应用,仔细比较不 同编程工具的区别与联系。 • 其梯形图和语句表程序结构如图所示。
LD O A =
I0.0 LD I0.1 O I0.2 A Q0.0 =
I0.0 //装入常开触点 //装入常开触点 I0.1 //或常开触点 //或常开触点 I0.2 //与常开触点 //与常开触点 Q0.0//输出触点 //输出触点
1、基本指令及编程方法 PLC的程序表达式: 语言特点:面向控制过程,面向问题,自然语言 ⑴、梯形图 组成:常开触点、常闭触点、线圈 连接方式:串联、并联 I0.0 I0.1 特点:每行以触点开始 每行以线圈结束 线圈可以是多种软元件 ⑵、语句表 母线 Q0.1 Q0.1
Q0.1
Q0.2
例 逻辑取与输出线圈 梯形图与语名表
KM1
SB1 SB2 I0.0 I0.1 Q0.0 KM 220AVC
AN I0.1
AN I0.2
= Q0.0 思考:SB2、FR用PLC控制时 可否用常开的触点?
FR
I0.2
I0.0 Q0.0
I0.1
I0.2
Q0.0
二、 正负跳变指令
•正跳变触点检测到脉冲的每一次正跳变后, 产生一个微分脉冲。 •指令格式:Eu (无操作数)
4.1.2 复杂逻辑指令
• • • • • • 1. 电路块串联指令 2.电路块并联指令 3. 逻辑推入栈指令 4. 逻辑弹出栈指令 5. 逻辑读栈指令 6. 装入堆栈指令
电路块的串、并联(P19) 1、电路块串联指令 • ALD,电路块串联指令(与块)。在梯形图中 用于将并联电路块进行串联连接。 • 在语句表中指令ALD执行情况如表所示。
LD I0.0 A Q0.1 = Q0.0 LD I0.1 AN = M0.3 Q0.1
I0.1 M0.3
Q0.1
并联指令 O ON 操作元件:位元件:
I Q M S T 梯形图与语句表 LD I0.0 O Q0.0 = Q0.0 I0.2 C I0.1 Q0.1 I0.0 Q0.0 Q0.0
LD I0.1
4.1 位操作类指令(P133)
• • • • • • 4.1.1 4.1.2 4.1.3 4.1.4 4.1.5 4.1.6 指令使用概述 基本逻辑指令 复杂逻辑指令 定时器指令 计• • • • • •
(1)Network (2)能流/使能 (3)编程顺序 (4)编号分配 (5)内、外触点的配合 (6)触点的使用次数 (7)线圈的使用次数 (8)线圈的连接