超声波三维空间定位在虚拟现实系统中的应用
三维超声成像的原理与应用

三维超声成像的原理与应用三维超声成像(3D ultrasound imaging)是一种利用超声波技术以非侵入性方式对人体内部进行立体成像的方法。
它通过将多个二维超声图像进行处理和重建,得到一个具有深度信息的三维图像。
三维超声成像的原理可以简单描述为以下几个步骤:1. 发送超声波:系统通过超声探头向目标区域发送高频超声波。
超声波会在组织中传播,并在遇到组织的不同界面时发生反射、散射或传递。
2. 接收反射信号:超声探头接收到被反射回来的超声波信号,并将其转换成电子信号。
3. 信号处理:接收到的电子信号经过放大、滤波等处理,以便提高信号质量和可视化效果。
4. 三维重建:通过多普勒成像技术,系统能够获取到目标区域内不同深度处的超声波信号。
对这些信号进行处理和计算,便可将多个二维图像重建为一个立体的三维图像。
这种重建方式可以通过体素的堆叠或扫描来实现。
三维超声成像技术在医学领域有着广泛的应用,主要包括以下几个方面:1. 产科领域:三维超声成像可以提供全面而详细的胎儿图像,有助于检测先天性缺陷、评估胎儿的生长发育情况,并可以在手术前对胎儿进行评估和规划。
2. 乳腺疾病诊断:三维超声成像可以提供更准确和详细的乳腺图像,有助于乳腺肿块的检测、评估和定位。
它可以帮助医生确定肿块的性质(良性还是恶性)以及乳腺癌的分期。
3. 心血管疾病诊断:三维超声成像可用于评估心脏结构和功能。
它可以提供三维心脏图像,帮助医生检测心脏病变、评估心脏功能和血流动力学。
4. 泌尿系统疾病诊断:三维超声成像可以用于评估肾脏、膀胱和前列腺等器官的结构和功能。
它可以检测结石、肿瘤、积水等疾病,并提供更准确的定位信息。
5. 骨科领域:三维超声成像可以辅助骨折的检测和评估,有助于确定骨折的位置和程度。
它也可以用于骨骼疾病的评估和手术导航。
除上述应用外,三维超声成像还可以用于其他领域,如肿瘤诊断、肝脏疾病、血管疾病等。
与其他成像技术相比,三维超声成像具有无创、无辐射、实时性和相对较低的成本等优势,因此在临床应用中得到了广泛的推广和应用。
超声波定位技术研究的背景现状及应用

超声波定位技术研究的背景现状及应用超声波定位技术是一种将超声波技术应用于定位和测距的方法。
它利用超声波在空气和物质界面反射或透射的特性,通过测量超声波传播的时间或相位差,来确定目标位置的技术。
目前,超声波定位技术在医疗、工业、环境监测等领域得到广泛应用。
在医疗领域,超声波定位技术广泛应用于诊断、手术导航和治疗等方面。
在工业领域,超声波定位技术可应用于检测物体的质量、密度、厚度等物理特性。
在环境监测领域,超声波定位技术可用于检测水位、土壤密度、管道漏水等问题。
超声波定位技术的发展历程可以追溯到20世纪早期。
20世纪60年代,人们开始注意到超声波定位技术在医疗领域的应用潜力。
随着技术的不断发展,超声波仪器越来越小巧、精度越来越高,应用范围也越来越广泛。
当前,超声波定位技术已经成为医疗、工业、环境监测等领域必不可少的技术手段。
在工业领域中,超声波定位技术得到了广泛应用。
它可以用于疲劳损伤、材料缺陷等的检测。
因为超声波在材料中传播时受到反射、折射和衍射的影响,通过测量超声波传播的时间、频率和振幅等参数,可以确定材料中的缺陷位置和大小。
超声波定位技术通常可以满足快速、准确地测量和评估多种工艺中的质量和精度。
在环境监测领域,超声波定位技术的应用主要集中在水处理、污水处理、管道漏水等方面。
超声波定位技术可以准确测量水位、流量、压力等参数,为环保部门提供重要的数据支持。
此外,超声波定位技术还可以用于土壤密度、空气流速等方面的测量。
总的来说,超声波定位技术的应用前景非常广阔。
目前,随着相关技术的不断提升,超声波定位技术将进一步深入到各个领域,发挥更加重要的作用。
虚拟现实定位

基于超声波传感器产品
Thank 维空间定位,再结合计算机产 生的一种人为虚拟环境,这种虚拟的环境是通 过计算机图形构成的三维空间,产生立体的虚 拟环境和运动物体的运动状态,利用虚拟仿真 从而使得用户在视觉上产生一种沉浸于虚拟环 境的感觉。
超声波三维空间定位原理( 超声波三维空间定位原理(一)
利用超声波的非接触性测量距离的原理 是S=vt。在速度已知的情况下,只要测出 发射点与接收点的时间差就可以计算出 发射点与接收点的距离,进一步进行空间 定位。
虚拟现实定位技术
虚拟现实(Virtual Reality简称 ) 简称VR) 虚拟现实 简称
计算机模拟的三维环境。 一种可以创建和体验虚拟世界的计算机系统。 一门涉及计算机、图像处理与模式识别、语音 和音响处理、人工智能技术、传感与测量、仿 真、微电子等技术的综合集成技术。 用户可以通过传感设备,根据自身的感觉,使用 人的自然技能考察和操作虚拟世界中的物体, 获得相应看似真实的体验。
②在测量相位差的方式中,各个发射器发出高频的超声波, 测量到达各个接受点的相位差,由此得到点与点的距离, 再由三角运算得到被测物体的位姿。声波是正弦波,发射 器与接受器的声波之间存在相位差,这个相位差也与距离 有关。如果在一个采样周期内,物体运动的距离超过声波 信号波长的一半,就会造成问题。因为在每个波长后,信 号波形(相位)会重复。这时无法确定距离是加大还是减 少,因为二者造成的相位差相同。 这种方法是增量测量法,每步的测量误差会随时间积累。 绝对距离必须在初始由其它设备校准。它的问题是反射和 环境噪音。为了克服漂移问题,改进的模块化相位相干可 以达到毫米以下精度。
超声传感器包括三个超声发射器的阵列(安装 天花板上),三个超声接受器(安装在被测物体 上),用于启动发射的红外同步信号,以及计算 机。两种测量原理分别测量飞行时间或相位差
三维超声成像的原理与应用

三维超声成像的原理与应用一、引言三维超声成像技术是一种通过超声波对物体进行扫描并生成三维图像的成像技术。
它在医学领域得到广泛应用,可以提供具有高分辨率和高对比度的图像,为医生提供更准确的诊断信息。
本文将介绍三维超声成像的原理和应用。
二、原理1.超声波的产生和传播–超声波是一种机械波,通过晶体或磁体中的电磁转换器产生,经过超声探头传到物体中,并通过转换器接收回来。
–超声波的频率通常在2-18 MHz之间,高频率可以提供高分辨率的图像。
2.超声波的反射和散射–超声波在物体中的传播过程中,会遇到不同组织的边界或结构,这些边界或结构会使超声波发生反射或散射。
–超声波的反射和散射信号可以被探头接收,并经过处理形成图像。
3.超声波的成像原理–超声波的成像原理主要是通过测量超声波的传播时间和强度来确定组织的位置和特性。
–通过测量超声波传播时间的差异,可以推断不同组织的深度。
–通过测量超声波的强度,可以获得组织的对比度信息。
三、应用1.临床应用–超声心动图•三维超声心动图可以提供更准确的心脏结构和功能信息,用于诊断心脏病变。
–产科超声•三维超声在产科领域可以提供更清晰的胎儿图像,用于胎儿畸形的检测和评估。
–肝脏超声•三维超声可以对肝脏进行全面的评估,包括肿瘤的检测和定位、肝血流动力学的评估等。
–乳腺超声•三维超声可以提供乳腺病变的更准确的形态、定位和大小信息,用于乳腺癌的早期诊断。
2.科研应用–细胞成像•三维超声可以在细胞水平上观察细胞的结构和功能,用于细胞生物学研究。
–动物模型研究•三维超声可以在动物模型中观察器官结构和功能的变化,用于研究疾病的发生和发展机制。
–肿瘤研究•三维超声可以对肿瘤进行全面的评估,包括体积测量、血流动力学分析等,用于肿瘤的研究和治疗监测。
3.工业应用–材料检测•三维超声可以对材料的密度、缺陷等进行评估,用于材料的质量控制。
–管道检测•三维超声可以对管道内部的泄漏、堵塞等问题进行检测,用于管道的维护和修复。
三维多媒体技术在虚拟现实中的应用有哪些?

三维多媒体技术在虚拟现实中的应用有哪些?一、三维建模与设计技术在虚拟现实中的应用在虚拟现实中,三维建模与设计技术被广泛应用于建筑、游戏、影视等领域。
利用三维建模技术,可以将现实世界中的物体、场景进行精确的数字化呈现。
在建筑设计中,通过三维建模技术可以实现建筑物的虚拟漫游,让设计者和客户可以用虚拟现实的方式亲身体验建筑设计方案。
在游戏开发中,三维建模技术可以创造出逼真的游戏场景和角色形象,提升游戏的沉浸感和真实感。
同时,三维建模技术还被广泛应用于影视特效制作中,通过数字化建模和渲染,可以创造出惊人的特效画面。
二、虚拟现实交互技术的应用虚拟现实交互技术是指人与虚拟世界之间的互动方式。
通过借助感应器、跟踪设备等技术,将人的动作、声音等信息输入虚拟系统,实现人与虚拟场景的实时互动。
在虚拟现实游戏中,玩家可以通过手柄、头盔等设备与游戏世界进行互动,创造出身临其境的游戏体验。
此外,虚拟现实交互技术还被应用于医学培训、军事仿真等领域,为学习者提供沉浸式的实训环境,提高学习效果和仿真训练的真实性。
三、虚拟现实在教育领域的应用虚拟现实在教育领域有着广泛的应用前景。
通过虚拟现实技术,学生可以身临其境地参观历史遗址、观看立体化的课程,提升学习兴趣和学习效果。
虚拟实验室的建立也能够更好地满足学生的实践需求,提高实验教学的安全性和实用性。
同时,虚拟现实技术还可以实现远程教育,让学生在不同地点、不同时间进行共享学习体验,打破传统教育的时空限制。
以上是三维多媒体技术在虚拟现实中的应用,不论是在建筑、游戏、影视、教育领域,三维多媒体技术都发挥着重要作用。
随着科技的不断发展,相信三维多媒体技术将能够在更多领域展示出更大的应用前景和创新。
虚拟现实 答案
1.什么叫虚拟现实技术虚拟现实技术(Virtual Reality 简称VR) 是一种模拟人类视觉、听觉、力觉、触觉等感知行为的高度逼真的人机交互技术,是在数字图像处理、计算机图形学、多媒体技术、人—机接口技术、计算机仿真技术及传感器技术等许多信息技术基础上发展起来的一门多学科的交叉技术。
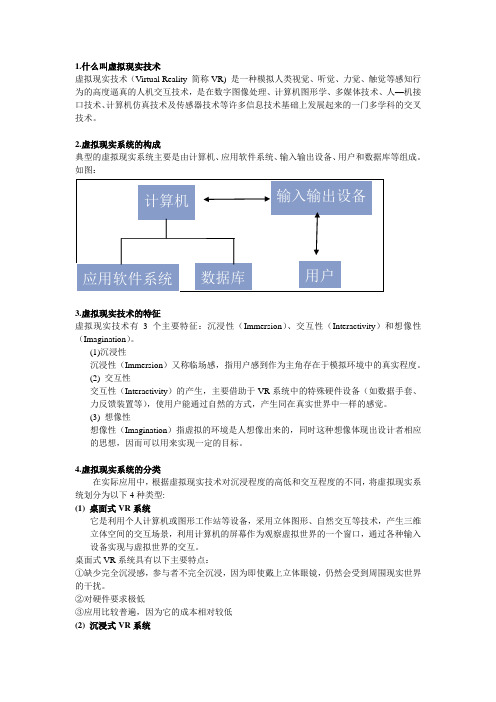
2.虚拟现实系统的构成典型的虚拟现实系统主要是由计算机、应用软件系统、输入输出设备、用户和数据库等组成。
如图:3.虚拟现实技术的特征虚拟现实技术有3个主要特征:沉浸性(Immersion)、交互性(Interactivity)和想像性(Imagination)。
(1)沉浸性沉浸性(Immersion)又称临场感,指用户感到作为主角存在于模拟环境中的真实程度。
(2) 交互性交互性(Interactivity)的产生,主要借助于VR系统中的特殊硬件设备(如数据手套、力反馈装置等),使用户能通过自然的方式,产生同在真实世界中一样的感觉。
(3) 想像性想像性(Imagination)指虚拟的环境是人想像出来的,同时这种想像体现出设计者相应的思想,因而可以用来实现一定的目标。
4.虚拟现实系统的分类在实际应用中,根据虚拟现实技术对沉浸程度的高低和交互程度的不同,将虚拟现实系统划分为以下4种类型:(1) 桌面式VR系统它是利用个人计算机或图形工作站等设备,采用立体图形、自然交互等技术,产生三维立体空间的交互场景,利用计算机的屏幕作为观察虚拟世界的一个窗口,通过各种输入设备实现与虚拟世界的交互。
桌面式VR系统具有以下主要特点:①缺少完全沉浸感,参与者不完全沉浸,因为即使戴上立体眼镜,仍然会受到周围现实世界的干扰。
②对硬件要求极低③应用比较普遍,因为它的成本相对较低(2) 沉浸式VR系统它利用头盔式显示器或其它设备,把参与者的视觉、听觉和其它感觉封闭起来,并提供一个新的、虚拟的感觉空间,并利用位置跟踪器、数据手套、其它手控输入设备、声音等使得参与者产生一种身在虚拟环境中、并能全心投入和沉浸其中的感觉。
3D成像的介绍和工作原理以及应用
3D成像的介绍和工作原理以及应用3D成像是一种通过获取并处理目标物体在三维空间内的信息,将其显示为可以与真实物体相似的立体图像或模型的技术。
它利用了不同视角、深度信息和纹理等多种数据来构建一个真实感强烈且立体的场景。
3D成像技术广泛应用于计算机图形学、医学、机器人、虚拟现实、增强现实以及艺术设计等领域。
工作原理:1.数据获取阶段:数据获取是3D成像的关键步骤。
它使用不同的传感器或设备来收集目标物体的多个角度或位置的图像或点云数据。
-激光扫描:通过激光器发射光束并记录光束对目标物体的反射,从而确定物体表面的位置和形状。
激光扫描仪可以提供高精度的三维点云数据。
-立体相机:使用两个或多个相机同时拍摄目标物体的图像。
通过比较这些图像之间的差异,可以获取物体的深度信息。
-超声波扫描:使用超声波传感器发送短脉冲,并记录脉冲回弹的时间和强度。
利用声波的传播速度和时间差,可以计算物体的位置。
2.数据处理阶段:数据处理是3D成像过程的核心部分。
它涉及对收集到的数据进行处理、融合和重建,以生成一个完整和准确的三维模型。
-数据对齐:将从不同视角或位置获取的数据进行对齐,以确保它们在相同的参考坐标系中。
-点云拼接:将多个点云数据拼接在一起,形成一个完整的点云模型。
-纹理映射:将拍摄到的纹理信息映射到点云模型上,使其更具真实感和细节。
应用领域:1.虚拟现实(VR)和增强现实(AR):3D成像技术使得创建逼真的虚拟世界和真实世界的结合成为可能。
它可以用于游戏、模拟培训、虚拟旅游等领域,为用户提供更具沉浸感的体验。
2.电影制作和动画:3D成像技术广泛应用于电影制作和动画中,可以创建逼真的角色和场景,提高视觉效果和真实度。
3.医学:通过激光扫描等3D成像技术,可以生成人体器官的三维模型,用于诊断、手术模拟和定制医疗器械等方面。
4.工程设计与制造:在工程设计与制造中,使用3D成像技术可以生成用于原型制作和产品设计的虚拟模型,减少试错成本和时间,提高效率。
三维空间位置定位方法

三维空间位置定位方法一、引言三维空间位置定位方法是指在三维坐标系中确定一个物体或者目标的具体位置和方向的方法。
在现代科技发展中,三维空间位置定位方法被广泛应用于航空航天、导航、地理信息系统、虚拟现实等领域。
本文将介绍几种常见的三维空间位置定位方法。
二、全球定位系统(GPS)全球定位系统是一种基于卫星导航的三维空间位置定位方法。
通过接收多颗卫星发射的信号,利用三角定位原理计算出接收器的三维坐标。
GPS系统由24颗主动卫星和若干地面控制站组成,可以在全球范围内提供高精度的位置定位服务。
GPS已经成为导航、车载导航、船舶定位和军事等领域中最常用的三维空间定位方法之一。
三、惯性导航系统惯性导航系统是一种基于惯性测量单元(IMU)的三维空间位置定位方法。
IMU由加速度计和陀螺仪组成,通过测量物体的加速度和角速度,利用积分计算出物体的位置和姿态。
惯性导航系统不受外界环境干扰,可以在没有GPS信号的环境下提供连续的位置定位服务。
然而,由于积分误差的累积,惯性导航系统的精度会随时间的推移而降低。
四、视觉定位系统视觉定位系统是一种基于摄像头或者摄像头阵列的三维空间位置定位方法。
通过对环境中的特征点进行提取和匹配,利用三角定位原理计算出相机的位置和姿态。
视觉定位系统可以实时获取物体的位置信息,并且不受外界环境的影响。
然而,视觉定位系统对环境中的光照条件、遮挡物和特征点的数量等因素较为敏感,会影响定位精度。
五、声纳定位系统声纳定位系统是一种基于声波传播的三维空间位置定位方法。
通过发送声波信号,并测量信号的传播时间和接收信号的强度,利用声速和声纳阵列等原理计算出目标的位置。
声纳定位系统在水下环境中应用广泛,可以实现对海洋中的船舶、鱼群等目标进行准确定位。
然而,声纳定位系统受到水下环境的影响,如水温、盐度、海流等因素都会对声波传播产生影响,从而影响定位精度。
六、激光定位系统激光定位系统是一种基于激光测距原理的三维空间位置定位方法。
基于超声波技术的智能室内定位研究

基于超声波技术的智能室内定位研究随着智能家居技术的不断进步,越来越多的人开始关注室内定位。
智能室内定位技术可以为人们提供更多便利,使室内生活更加舒适。
目前,基于超声波技术的室内定位系统已经得到广泛应用,成为研究热点之一。
一、超声波技术与室内定位超声波技术是一种非常先进的测量技术,能够在两个点之间传输信息。
它可以被用于声学测量、控制、定位、人机交互、检测和安全领域,其中最为重要的一个应用就是室内定位。
超声波技术的优点在于其信号强、传输距离长,能够覆盖更广的室内范围。
它可以通过改变超声波的频率、振幅、相位等来实现不同的室内定位功能,因此被广泛应用于各种不同的室内定位系统中。
二、基于超声波技术的室内定位系统基于超声波技术的室内定位系统主要有三个方面的应用:超声波传感、超声波定位和超声波导航。
下面将分别对这三个方面的应用进行阐述。
超声波传感:超声波传感器是基于超声波技术的传感器,它可以探测到物体的距离、方向和速度等信息。
使用超声波传感器可以让智能设备更加灵活和便利,可以实现人机交互、自动控制等功能。
超声波传感器被广泛应用于各种室内定位系统,包括智能家居、智能门锁等。
超声波定位:超声波定位是通过测量超声波的传输时间和信号强度来进行室内定位。
超声波定位可以提供高精度、高准确性的定位信息,可以实现单室内或多室内的定位需求。
超声波定位被广泛应用于室内导航、智能家居等领域,为人们的生活带来了更多便利。
超声波导航:超声波导航是一种基于超声波技术的室内导航系统,它可以为使用者提供更准确、更快速的导航信息。
超声波导航系统可以通过声波反射和声纹识别等技术来实现室内导航,帮助人们更好地掌握室内环境,使人们的室内生活更加方便。
三、基于超声波技术的室内定位系统应用案例1.智能门锁:智能门锁是基于超声波技术的一种室内定位系统,它可以通过超声波传感器探测人体距离门锁的距离和方向,从而实现远程开门和关门的功能。
使用智能门锁既方便又安全,而且在实际应用中被证明是非常可靠的。
三维超声临床应用研究

三维超声临床应用研究在医疗领域,随着科技的不断进步,各种先进的医疗设备被广泛运用于临床实践中,其中三维超声技术便是其中的一种。
三维超声技术结合了超声波成像技术与计算机图像处理技术,能够为医生提供更为清晰、准确的解剖结构图像,为患者提供更为精准的诊断和治疗方案。
本文将就三维超声在临床应用中的研究进展进行探讨。
一、三维超声技术原理及特点三维超声技术是基于二维超声技术的发展而来,其原理是通过超声波在人体内部的传播和回声特征来获取人体解剖结构的图像。
与传统的二维超声相比,三维超声技术可以实现任意平面的成像,从而提供更立体、更全面的解剖信息。
同时,三维超声技术还可以通过多平面的成像实现对立体结构的立体重建,进一步提高了成像的准确性和可靠性。
二、三维超声在产科领域的应用在产科领域,三维超声技术被广泛用于孕妇的产前检查与监护中。
通过三维超声技术,医生可以清晰地观察胎儿的生长发育情况、胎盘位置及胎儿在子宫内的具体位置,从而及时发现可能存在的问题并采取相应的措施。
此外,三维超声技术还可以用于指导产前诊断和产科手术,帮助提高手术的安全性和成功率。
三、三维超声在心脏病学领域的应用在心脏病学领域,三维超声技术被广泛应用于心脏解剖结构的评估和疾病诊断。
通过三维超声技术,医生可以实现对心脏各个腔室和瓣膜的立体成像,帮助准确定位心脏病变的位置和范围,提供更为准确的诊断依据。
同时,三维超声技术还可以实现对心脏血流动力学的检测,帮助医生评估心脏的功能状态,并制定个性化的治疗方案。
四、三维超声在肿瘤诊断和治疗中的应用在肿瘤诊断和治疗领域,三维超声技术也发挥着重要作用。
通过三维超声技术,医生可以实现对肿瘤的立体成像,准确评估肿瘤的大小、形态和浸润情况,为肿瘤的诊断和治疗提供更为准确的依据。
同时,三维超声技术还可以用于肿瘤的引导性治疗,如超声消融、射频消融等,帮助提高治疗的疗效和安全性。
五、三维超声技术的发展趋势随着科技的不断进步,三维超声技术在临床应用中的地位和作用将会继续扩大。
超声波与三维实景结合的应用

超声波与三维实景结合的应用作者:乔盈后刚尤用金浩来源:《科学与财富》2020年第32期摘要:超声波是近年来在气体介质超声相关检测技术中应用最新的技术。
本文介绍了超声波与三维真实景观紧密结合的应用。
给出了超声波的基本原理,详细介绍了直接选取时区风场的方法。
关键词:超声波;三维实景;应用1、前言超声是一种新的技术,超声成像可以探测不同气体介质中的各种技术。
与传统的各种机械式风速仪相比,超声波风速仪在快乐微选址过程中没有金属机械表面磨损。
在此中间阶段,二维超声图像风速仪的应用方法得到了技术基础。
因此,平均风速是一个三维矢量,叠加在大尺度规则气流上,随机分布一些小尺度脉动,时空转换和随机选择变化明显。
因此,三维超声对比风速仪可以提供比风速矢量更真实的人,传统二维风速仪具有更详细的信息内容,也可以成功地完成一些传统二维形式的风场分量信息的内容采集应用风速计无法实现。
2、超声波风速风向测量方法当超声波原理通过各种介质中的通道传播时,介质的速度将叠加在声波的加速度上,这将影响340m的形成,从而导致声波的前向有效传播时间和反向再传播时间。
介质的速度可以通过测量方法的差异来获得。
在超声波的快速传播过程中,当导弹信号重新与障碍物接触时,就会发生多普勒频移和频移。
它的大小与超声传播介质的快速重传密切相关。
因为可以获得接收和生成信号与发送各种信号之间的高频差,所以可以推导各种媒体的速度。
在超声的广泛传播过程中,超声成像和流量检测结果对应于上述不利现象。
一种方法是的时差法,多普勒法和涡流风向风速的精确测量方法。
根据上述时差问题的不同形式,的时差方法可分为时区法,频率差法和土壤差法四种。
顾名思义,时差法可以通过多种方式获得沿风传播和单通道传播的距离差,直接计算风向,风速和风向变化。
频差法是多周期直接选择法。
它的高精度高于的时差法。
适用于中,小,大直径管道。
具有精度高,验收方便的优点。
然而,优点是它受到小的环境的极大影响,并且工作相对不稳定。
超声波在虚拟现实技术中的作用是什么

超声波在虚拟现实技术中的作用是什么在当今科技飞速发展的时代,虚拟现实技术(Virtual Reality,简称VR)已经逐渐走进了我们的生活。
从沉浸式的游戏体验到复杂的工业设计模拟,VR 为我们带来了前所未有的交互方式和感知体验。
而在这一令人惊叹的技术背后,超声波扮演着一个相当重要的角色。
要理解超声波在虚拟现实技术中的作用,首先我们得明白什么是超声波。
简单来说,超声波是一种频率高于人类听觉上限(约 20kHz)的声波。
它具有许多独特的性质,使其在各种领域都有广泛的应用。
在虚拟现实技术中,超声波主要在触觉反馈方面发挥着关键作用。
当我们在虚拟世界中进行交互时,比如触摸一个虚拟物体或者感受物体的表面纹理,传统的视觉和听觉反馈往往是不够的。
这时候,超声波触觉反馈技术就能够为我们提供更加真实和细腻的触感。
通过特定的超声波发生器和传感器,系统可以在用户的皮肤上产生微小的压力变化,模拟出不同的触觉感受。
例如,当用户在虚拟环境中触摸到一个粗糙的表面时,超声波可以制造出相应的振动和摩擦感,让用户仿佛真的在触摸一个真实存在的粗糙物体。
这种触觉反馈大大增强了虚拟现实体验的沉浸感和真实感,使用户能够更加自然和直观地与虚拟世界进行交互。
除了触觉反馈,超声波在虚拟现实中的空间定位和追踪方面也有着重要的贡献。
在一些高端的虚拟现实系统中,超声波传感器可以精确地检测用户的手部、头部或者身体的位置和运动。
与传统的光学追踪技术相比,超声波追踪具有一些独特的优势。
它不受光线条件的影响,能够在黑暗或者复杂的环境中正常工作。
而且,超声波对于障碍物的穿透能力相对较强,可以在一定程度上减少追踪信号被阻挡的情况。
通过实时准确地获取用户的位置和动作信息,虚拟现实系统能够迅速做出相应的反应,调整虚拟场景的呈现,使用户感受到更加流畅和自然的交互体验。
比如,当用户在虚拟空间中转身或者移动手臂时,虚拟场景能够实时地跟随变化,给人一种身临其境的感觉。
此外,超声波还可以用于虚拟现实中的声音定位和传播模拟。
三维声场重建技术及其在虚拟现实中的应用研究

三维声场重建技术及其在虚拟现实中的应用研究随着科技的不断发展,虚拟现实(Virtual Reality,简称VR)技术已经逐渐走入人们的生活。
虚拟现实技术通过模拟真实场景,使用户能够身临其境地感受到虚拟世界的存在。
然而,为了进一步提升虚拟现实的沉浸感,三维声场重建技术在其中起到了重要的作用。
三维声场重建技术是指通过多个声源和麦克风阵列,利用信号处理算法对声音的方向、距离和强度进行准确重建的技术。
这种技术可以模拟真实的声音环境,使得用户可以听到来自不同方向的声音,并且可以根据声音的强度和距离感知声源的远近。
在虚拟现实中,三维声场重建技术可以为用户提供身临其境的听觉体验。
通过将多个声源放置在虚拟场景中,并通过麦克风阵列捕捉环境中的声音,系统可以根据声音的特征进行信号处理和重建,使用户能够听到来自不同方向的声音。
这样,用户在虚拟现实中可以感受到声音从不同方向传来的感觉,增加了虚拟现实的真实感和沉浸感。
三维声场重建技术在虚拟现实中的应用非常广泛。
首先,它可以应用于虚拟游戏中。
通过使用三维声场重建技术,游戏开发者可以为玩家提供更加真实的游戏体验。
例如,在射击游戏中,玩家可以听到敌人从不同方向接近的脚步声,从而更准确地判断敌人的位置。
这种听觉上的沉浸感可以使游戏更加刺激和具有挑战性。
其次,三维声场重建技术还可以应用于虚拟现实培训和教育领域。
在虚拟现实培训中,通过模拟真实场景并结合三维声场重建技术,可以为学生提供更加逼真的体验。
例如,在医学培训中,学生可以通过虚拟现实模拟手术环境,并通过听觉感知来自不同方向的声音,以提高手术技能和反应能力。
此外,三维声场重建技术还可以应用于虚拟会议和远程协作中。
通过在虚拟会议中使用三维声场重建技术,参与者可以感受到来自不同方向的声音,增强了远程协作的真实感和沟通效果。
这对于跨地域的团队合作和远程教育都具有重要意义。
然而,三维声场重建技术在应用中还面临一些挑战。
首先,信号处理算法的复杂性和计算量较大,对硬件设备的要求较高。
超声定位技术在无人驾驶中的应用

超声定位技术在无人驾驶中的应用随着科技的不断发展,无人驾驶技术逐渐走向成熟。
而在无人驾驶中,超声定位技术也越来越受到重视。
具体来说,超声定位技术是一种利用声波传感器对车辆周围环境进行检测和定位的技术。
一、超声定位技术的基本原理超声定位技术的基本原理是利用超声波传感器对物体进行探测。
超声波是一种高频声波,频率通常在20kHz以上,属于不可听频率。
超声波在空气中传播速度快,而且不易受到环境干扰,因此超声波被广泛应用于生产、医疗和智能家居等领域。
在无人驾驶中,超声波传感器通常安装在车辆的下方和四周,用来检测车辆周围的环境。
当超声波传感器发出超声波时,会同时记录声波发射时间和回波时间,并通过计算得出声波传播的时间差,从而得到物体和传感器之间的距离。
根据这种方法,超声定位技术可以对车辆环境进行高精度、角度多样的探测和定位。
二、超声定位技术在无人驾驶中的应用超声定位技术在无人驾驶中的应用主要包括以下方面:1. 障碍物探测和避免超声定位技术可以帮助无人驾驶车辆识别前方障碍物,避免与障碍物碰撞。
无人驾驶车辆通常会安装数个超声波传感器,将这些传感器的探测结果传输到车辆的控制系统中,从而实现对车辆前方的障碍物进行实时检测。
当车辆前方出现障碍物时,控制系统会采取避让措施,确保车辆行驶的安全。
2. 停车辅助超声定位技术还可以用于无人驾驶车辆的自动泊车。
在自动泊车过程中,超声波传感器探测车辆周围环境,计算出车辆和障碍物的距离,并实时调整车辆的方向和速度,确保车辆安全地停在目标位置上。
3. 车道保持超声定位技术可以帮助车辆在行驶过程中保持车道。
当车辆偏离车道时,超声波传感器会检测到车辆偏离的方向和距离,并将这些信息传输到车辆的控制系统中,从而实现对车辆的纠正控制。
4. 弱光环境下的行驶超声定位技术不受环境光线影响,因此在弱光环境下,超声传感器可以帮助车辆进行高精度的定位。
这对于夜间行驶或恶劣天气条件下的行驶非常重要。
三、超声定位技术的不足与发展方向超声定位技术虽然在无人驾驶中有着广泛的应用前景,但是目前还存在一些不足之处。
超声波在虚拟现实技术中的新应用是什么
超声波在虚拟现实技术中的新应用是什么在当今科技飞速发展的时代,虚拟现实技术(VR)已经成为了一个备受关注的领域。
它为用户带来了沉浸式的体验,让人们仿佛置身于一个全新的虚拟世界中。
而超声波作为一种重要的物理现象,也在虚拟现实技术中找到了新的应用领域,为其发展带来了更多的可能性。
超声波是一种频率高于人类听觉上限的声波,其具有方向性好、穿透能力强等特点。
在虚拟现实技术中,超声波可以被用于实现更加真实的触觉反馈。
以往的虚拟现实体验中,视觉和听觉效果已经有了显著的提升,但触觉反馈方面仍存在一定的不足。
而通过超声波的应用,可以在用户接触虚拟物体时,产生相应的触觉感受。
例如,当用户在虚拟环境中触摸一个表面粗糙的物体时,超声波可以在用户的手上模拟出类似的粗糙度感觉,从而增强了沉浸感。
超声波还能够用于虚拟现实中的空间定位和追踪。
在传统的虚拟现实系统中,通常使用光学或惯性传感器来跟踪用户的位置和动作。
然而,这些方法可能会受到环境光线、物体遮挡等因素的影响,导致定位不准确。
而超声波定位系统则可以克服这些问题。
通过发射和接收超声波信号,可以精确地确定用户在空间中的位置和姿态。
这不仅提高了虚拟现实体验的准确性,还能够让用户在更大的空间范围内自由移动,而不会出现定位丢失的情况。
在虚拟现实的交互方面,超声波也有着独特的优势。
想象一下,在一个虚拟的游戏场景中,玩家可以通过手势来控制游戏角色的动作。
超声波传感器可以捕捉玩家手部的动作,并将其转化为相应的指令输入到系统中。
与传统的手柄或触摸板控制方式相比,这种基于超声波的手势交互更加自然和直观,能够让玩家更加投入到游戏中。
此外,超声波还可以用于改善虚拟现实中的音频效果。
通过利用超声波的特性,可以实现更加逼真的声源定位和空间音效。
当虚拟场景中出现一个声音时,超声波可以帮助准确地模拟声音的传播方向和距离感,让用户能够更加准确地判断声音的来源和位置,进一步增强了虚拟现实环境的真实感。
除了以上提到的直接应用,超声波与其他技术的结合也为虚拟现实带来了新的机遇。
超声波在机器人视觉中的应用研究

超声波在机器人视觉中的应用研究随着智能机器人的不断进步与升级,机器人视觉这一领域得到了越来越多的重视和研究。
而超声波作为一种非常重要的传感器,也开始在机器人视觉中得到广泛的应用。
本文将从机器人视觉的相关概念入手,详细探讨超声波在机器人视觉中的应用研究。
一、机器人视觉的概念机器人视觉是指利用计算机、图像处理技术以及传感技术,对机器人周围环境信息进行探测和解释的技术领域。
机器人视觉在人工智能领域中占有重要地位,也是机器人技术中不可或缺的一部分,可以有效提高机器人的感知能力和智能化水平。
二、超声波传感器的概念超声波传感器是一种利用超声波进行侦测和监测的传感技术。
它具有非接触性、高精度、灵敏度高、响应速度快等特点,被广泛应用于气体、液体、固体、生物等多个领域。
超声波传感器可以通过测量声波的反射时间或声波在空气中的速度差来判断所侦测物体的距离和运动状态,从而实现对机器人周围环境信息的实时探测和处理。
三、超声波在机器人视觉中的应用1、避障与导航机器人导航、路径规划和避障是机器人技术中的重要研究内容。
超声波传感器可以精确测量物体与机器人的距离,并通过该距离判断物体是否会对机器人行进产生威胁。
利用超声波传感器,可以实现机器人自主寻路及面对复杂环境的避障,为机器人的运动提供有效的保障。
2、物体检测与识别机器人视觉在物体检测和识别方面有着广泛的应用,而超声波传感器可以通过探测目标物品并测量其距离和形状等参数,完成对目标物体的检测、识别、跟踪等操作。
对于物体检测、目标跟踪、空间位置判断等任务,超声波传感器具有独特的优势。
3、环境监测和控制超声波传感器可以测量声波的反射时间和距离等参数,从而实现对机器人周围环境信息的实时监测和控制。
例如,利用超声波传感器可以监测机器人所处环境中的湿度、温度、水位等信息,或者控制机器人的运动方向、速度、停止等操作。
四、超声波在机器人视觉中的未来展望随着机器人技术的不断发展和进步,超声波传感器作为一种非常重要的传感技术,在机器人视觉中的应用前景也变得越来越广泛和重要。
连续超声波位置跟踪器的设计原理及其在虚拟现实系统中的应用实现

位置跟踪器是虚拟现实和其它人机实时交互系统中最重要的输入设备之一,它实时地测量用户身体或其局部的位置和方向并作为用户的输入信息传递给虚拟现实系统的主控计算机,从而根据用户当前的视点信息刷新虚拟场景的显示.基于连续调幅超声波相位差相干测距方法实现快速、高分辨率的动/静态方法测量的原理,本文着重阐述了以连续超声波相位差相干测量法实现三维动态位置测量的原理、系统设计、实验结果,并利用上述跟踪器研究了具有三维实时交互控制能力的虚拟现实系统样机.关键词:位置跟踪器;超声波测距器;虚拟现实系统;虚拟场景Design of Position Tracker Using Continuous Ultrasonic Wave and Its Application in Virtual RealityHUA Hong,WANG Yong-tian,CHANG Hong(Dept.of Opto-Electronics Engineering,Beijing Institute of Technology,P.O.Box 327,Beijing 100081,China)Abstract:Position tracker is one of the most critical input devices for human-machine i nterface utilities in virtual reality and other human-machine interaction systems.It determine s the position and orientation of an object of interest (such as the user's head) and passes the information to the host computer in real time,which redraws the virtual world on the basis of the current visual point of the user.A dynamic position tracker based on continu ous amplitude-modulated ultrasonic wave is developed by means of the interferometric tech niques.Its principles,technical implementation and experimental results are discussed.A proto type virtual reality system using the ultrasonic position tracker as an input device is also constructed and presented in the paper.Key words:position tracker;ultrasonic rangefinder;virtual reality system;virtual world一、引言灵境技术,又称“虚拟现实”(Virtual Reality,简称VR),是80年代在美国等科技先进国家发展起来的一项新技术,是以浸没感、交互性和构想为基本特征的高级人机界面,它综合计算机仿真技术、图像处理与模式识别技术、智能接口技术、人工智能技术、多媒体技术、计算机网络技术、并行处理技术和多传感器等电子技术模拟人的视觉、听觉、触觉等感官功能,使人能够沉浸在计算机创造的虚拟场景中,并能够通过多种感官渠道与虚拟世界的多维化信息环境进行实时交互[1].从广义上讲,虚拟现实系统由虚拟场景发生器、输入设备和输出设备组成.用于VR系统的输入设备分为两大类:交互设备和方位跟踪设备.交互设备使得用户在虚拟境界中漫游时能操纵虚拟物体,而方位跟踪设备可以实时地测量并跟踪用户身体或其局部的物理位置和方向,使得他能够在虚拟境界中漫游[1].由此可见方位跟踪设备是创建虚拟现实系统的硬件基础.在VR技术中,目前有机电式、电磁式、声学式、光电式和惯性式五种常用的方位跟踪器[2],其中以Polhemus Inc.和Asension Technology Corporation两家公司的电磁跟踪器和Logitech公司的超声波跟踪器最为著名,但这些产品不仅价格昂贵,而且存在着一些明显不足之处.例如电磁跟踪器对应用环境的电磁特性有苛刻的要求.Logitech的超声波跟踪器克服了电磁跟踪器的上述缺点,但它采用的T.O.F(Time of Flight)方法[3]虽然具有原理简单、易于实现的优点,但方位刷新频率受到脉冲传播时间的限制,在有六个测量通道、2m测量范围的条件下,方位刷新频率仅为二十几Hz,这样的刷新频率不能满足虚拟现实头盔显示器系统中对方位跟踪器的要求,另外,多通道的距离数据非同步获取,在目标连续运动的情况下,必然给测量结果带来较大误差[4,5].为了克服T.O.F方法的缺点,本文利用连续超声波相位差测距原理实现多通道同步测量,刷新频率不再受声波传播时间的制约,多通道测量结果是同步相干数据,能够实现快速、高分辨率的动/静态方位测量.再结合声学式跟踪器具有干扰源少、测量精度较高以及研制成本低等突出优点,因而在虚拟现实系统(如头盔显示器、数据手套)、机器人技术、武器系统、人机交互设备(如3D鼠标)等领域具有广泛的应用前景.二、跟踪器原理1.位置测量原理根据刚体动力学的分析[6],能够用运动物体上参考点的坐标表示该物体的位置坐标,并通过测量该参考点到空间三个静止的非共线点之间的距离唯一确定.设在静止参考坐标系Cξηζ中,T是运动物体上的参考点,其位置坐标用T(Tξ,Tη,Tζ)表示,R1、R2和R3是分布在边长为2a的等边三角形顶点处的三个非共线固定点,它们与参考坐标系的关系如图1所示,等边三角形的重心与原点C重合,三角形所在平面与Cζ轴垂直,CR1与Cη轴重合,R2R3与Cξ轴平行,它们的空间坐标依次为R1(0,2a/3,0)、R2(-a,-a/3,0)和R3(a,-a/3,0).图1参考点的分布示意图设点T到R1、R2和R3三点的距离分别为L1、L2和L3,如图1所示,则可列出以下方程组:(1)求得T的位置坐标为:(2)由此可以推知,当在T点固定超声波发射器,在R1、R2和R3处分别固定超声波接收器,根据发射信号与接收信号之间的相位关系分别测量三个接收器和发射器之间的距离[7,8],将测量所得到的距离和接收器的分布参数代入式(2)即可求出发射器的三维位置坐标,即运动物体的位置坐标.由于超声波测距系统的快速响应特征,通过一定采样频率的连续测量即可实现运动物体位置坐标的快速动态测量.2.接收器分布边长2a的设计原理根据前面的位置测量原理分析,接收器的分布边长2a是一个至关重要的设计参数,在其它系统参数相同的情况下,它直接影响到坐标分辨率和测量误差的大小.分析表明,分布边长2a与测距单元的测量范围、测量精度、传感器的发散锥角等物理参数以及用户对坐标测量系统的测量范围、分辨率和精度的要求密切相关,设换能器的发散角为α,测距单元的距离测量范围为要求发射器最大测量高度满足hmax H,坐标分辨率满足误差满足,则2a应该分别满足式(3)~(6)(3)(4)2a2dLmax/ε(5)2a dLmax/δ(6)3.测距原理在充分权衡传统T.O.F方法、相位差法和多普勒频移法的优缺点的基础上,本文提出了一种新的测距方案:用一个音频信号TM调制超声载波TU,由超声波换能器发射振幅被调制的连续式超声波.接收器的输出信号经过解调后得到调制信号RM,接收调制信号RM与发射调制信号TM之间的相位差ΔΦM正比于发射器到接收器之间的距离L.只要调制信号的频率足够低,使得它的波长大于最大测距范围,相位差ΔΦM就一定小于2π.利用数字鉴相器测量ΔΦM,设声音在空气中的传播速度为v,数字鉴相器的插值频率为f1,鉴相器的计数结果为NM,则距离L1为:L1=NMv/f1(7)但由于音频调制信号的频率较低,相位差ΔΦM的测量精度受到数字鉴相器分辨力和其它信号处理电路分辨力的限制,导致L的分辨力受到限制.为此,在保证L1的分辨率高于超声载波波长λc的前提下,从接收到的AM调制信号中提取载波信号RU,用数字鉴相器测量发射载波信号TU和接收载波信号RU之间的ΔΦC,数字鉴相器的插值频率为f2,鉴相器的计数结果为NC,则距离L可以表示为:L=int(L1/λC)+NCv/f2其中int(L1/λC)表示L1/λC的取整运算(8)和传统的连续超声波相位差测距法相比较,上述连续调幅超声波测距法不仅继承了测量范围大、刷新频率高、测距精度高等优点,而且克服了处理电路复杂和需要粗测基准的缺点.它也不同于音频测距法,不会受到环境声音的干扰,也不会造成环境声音污染.三、跟踪器设计1.测距单元设计测距单元由超声波发射机和接收机两个模块构成,两个模块的原理框图如图2和图3所示.图2发射器电路原理框图图3接收器电路原理框图数字鉴相器的工作波形如图4所示.图4数字鉴相器的工作波形图至于该测距系统的电路设计、实验结果和性能分析请参考文献[7].2.位置跟踪器设计利用超声波测距原理,分别测量出发射器到三个接收器之间的距离L1、L2和L3,根据式(2)即可计算出发射器T在定坐标系Cξηζ中的位置坐标(Tξ,Tη,Tζ).因此,超声波三自由度位置测量跟踪系统的设计框图如图5所示,其中三个测距单元由一个共同的超声波发射机和三个独立的超声波接收机构成,其设计原理框图分别参见图2和图3.图5超声波位置跟踪器的原理框图四、实验结果与分析图6所示的曲线是该测距单元的测量值与基准标称值之间的关系,它反应了该测距系统具有良好的线性度,在1.5m的测量范围内测距精度和分辨率可达±3mm,动态刷新频率达150Hz.图6测距结果与标称距离的比较实验中使用发散角α=60°的换能器,测距单元的距离测量范围为30cm L150cm,限定发射器最大测量高度满足hmax120cm,要求坐标分辨率满足ΔTξ=ΔTη=ΔTζ1cm、误差满足eξ=eη=eζ1cm的条件下,接收器的分布边长设计为2a=80cm,在此条件下,位置跟踪器的坐标测量范围为(80cm,80cm,120cm).表1是当发射器(即被跟踪目标)仅沿Cξ轴移动时位置跟踪器的测量值与基准标称值之间的对应关系.表2是当发射器(即被跟踪目标)仅沿Cη轴移动时位置跟踪器的测量值与基准标称值之间的对应系,表3是当发射器(即被跟踪目标)仅沿Cζ轴移动时位置跟踪器的测量值与基准标称值之间的对应关系,它们反应了该位置测量系统具有良好的线性度和测量精度,能够满足虚拟场景人机交互设备的要求.表1沿Cξ轴移动时跟踪器的基准标称坐标与测量坐标表2沿Cη轴移动时跟踪器的基准标称坐标与测量坐标表3沿Cζ轴移动时跟踪器的基准标称坐标与测量坐标五、应用在以REND386开发的虚拟场景平台上,用上述位置测量跟踪系统作为一种方位跟踪设备进行用户位置跟踪,从而构成了一个三维实时虚拟漫游系统,其设计框图如图7所示,主要由三个超声波测距单元、PC机数据采集单元、空间坐标位置算法、虚拟场景生成程序和三自由度空间坐标跟踪器与虚拟场景发生器的接口驱动程序构成.图7三维实时虚拟现实漫游系统原理框图图8(a)是虚拟场景的初始位置,图8(b)是视点的相对位置坐标从(0,0,0)变化到(50,20,50)时经过刷新的场景图像.图8(a)虚拟场景的(0,0,0)位置(b)虚拟场景的(50,20,50)位置六、结论以超声波三自由度位置跟踪器作为一个用REND386创建的虚拟场景的数据输入设备,构成一个完整的三维人机交互式虚拟现实演示系统.实验表明,该位置测量跟踪系统的测量精度、分辨率以及动态刷新频率能够满足虚拟场景三维数据输入的需求,图形刷新与数据刷新能够很好同步,没有明显的图像滞后,而且运动平滑,图像没有明显的抖动或者跳动感,是一个具有进一步开发潜力的样机系统.。
超声波定位讲解
3、定位算法简析
定位算法一
超声波空间定位方案一:
超声波发射器固定在待定位的物体 上,发射器按一定时间向周围发射超声 波脉,在其周围3个固定的位置安装超声 波接收器用以接收发射器发射的超声波 脉冲,利用超声波到达3个接收器的时间, 计算出超声波发射器的具体位置。如果 是移动物体,通过连续测量,就可描绘 出物体移动轨迹。 或者待定 位物体 上 装 的 是超 声 波 接 收 器 ,物 体 周 围装 的是 发射器 , 通 过 计 算 接 收器 与每 个 发 射 器 之间 距离 进行 定 位。
2、超声波定位系统设计
超声波定位系统设计
超声波定位系统主要研究超声波的测距方法,然后根据距离和提 供算法来计算出待测物体的位置,超声波测距有两种实现方法:
一、反射式测距法:反射式测距法就是发射超声波并接收由被测物产生的回波 ,根据 回波与发射波的时间差计算出待测距离。
声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中 传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声 波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍 物的距离(s),即:s=340t/2 。这就是经典的所谓的时间差测距法。
超声波及其物理性质
超声波物理特性:
超声波是一种机械波,其可以在气体、液体和固体 中传播,具有以下待性: (1)超声波的频率很高,波长较短,绕射现象小, 传播速度慢,可以像光线那样沿着一定方问传播,传播 的能量较为集中。 (2)超声波的振幅很小,加速度非常大,因而可以 产生较大的能量,而且对液体、固体的穿透本领很大, 尤其是在阳光不透明的固体中,它可穿透几十米的深度。 (3)对外界光线和电磁场不敏感,可用于黑暗、有 灰尘或烟雾、电磁干扰强、有毒等恶劣环境中,超声波 的这些特性,使其在遥控、测距以及其它领域得到了广 泛的应用。
基于超声波的定位系统研究与实现

传感器技术、微机电系统、现代网络和无线电通信等技术的进步,推动了无线传感器网络的产生和发展。
无线传感器网络具有广阔的应用前景,能应用于军事国防、工农业控制、城市管理、生物医疗、环境定位、抢险救灾、危险区域远程控制等诸多领域。
超声波定位的原理与无线电定位系统相仿,只是由于超声波在空气中的衰减较大,只适用于较小的范围。
超声波在空气中的传播距离一般只有几十米。
短距离的超声波测距系统已经在实际中应用,测距精度为厘米级。
超声波定位系统可用于无人车间等场所中的移动物体定位。
1 超声检测原理1.1 回波信号超声检测信号分析系统的原理是通过超声检测仪和信号采样装置及计算机的相互协调,实现超声检测电信号的模数转换,并完成检测数据的存储,计算机根据己量化的回波信号数据,利用有关理论及技术作相应处理。
超声检测是一种物理手段,利用超声波的性质来判断目标的距离。
是根据超声波在检测区域内运动时遇到界面反射所呈现的特征来判断物体位置状况的无损检测方法。
超声波检测中常用技术是把超声波短脉冲发送至被测物体,当声波自物体的非连续性结构或边界返回时,获取其回波波形。
当波触及物体前壁面时,有几个振荡周期的窄带随机波产生,称为始波,与此同时,还有一部分超声波渗入被测物体,触及物体的后壁面,又可得到振荡的回波,称为底波。
利用始底波之间的时间间隔与己知的声波在物体中的速度,便可算出物体的距离。
同样,当声波触及被测物体内的气孔、杂质等非连续性目标位置时,也会产生回波,据此得出目标位置的信息,如目标位置在检测区域内的大致位置性质等。
1.2 模型的建立超声波检测中所处理的是振荡波,具有窄带随机信号的特性。
传统的超声波检测设备采取硬件检波的方法提取回波包络,检测精度和主峰位置的精确定位都无法保证。
由于目标回波位置直接决定了测量精度,尤其对运动目标,如何精确测定出回波位置是技术的关键所在。
本文介绍的信号采集系统包括传感器信号采集设计及传感器与MOTE之间信息传递的硬件设计与构造。