FREESCAL--LIN transciver-MC33662
Freescale msCAN教程

Nicrosystem NSCF51AC-R1开发板教程-------CAN 总线教程作者Bluehacker <QQ: 282074921> /bluehacker 版本V 1.0 日期2010年8月25日 版权说明 本教程以Nicrosystem 开发的NSCF51AC-R1型低成本飞思卡尔coldfire V1开发板为平台,但相关内容应该适用于其他公司开发的飞思卡尔coldfire V1或S08开发板,甚至对其他非飞思卡尔MCU 也有借鉴作用。
我们通过网络免费提供此教程电子版本,不收取任何费用,您可以自由下载传播,但请您不要更改本教程中的任何文字、图片、表格;更不得以任何形式声称拥有本教程的版权,侵占作者的劳动成果。
本教程可能有描述不当或错误之处,欢迎你指正,但作者和作者所在公司单位不对可能的错误负任何责任。
备注如果你发现本教程的问题,欢迎您通过 nicrosystem@ 与我们联系。
也欢迎你关注我们的产品和在电子论坛上的活动作者的博客:/bluehackerNicrosystem “我们的freescale ”专栏:/forum-100-1.htmlNicrosystem 定期在与非网社区开展系列针对飞思卡尔处理器的diy 活动和助学活动:Nicrosystem EDN “我们的freescale”小组:/2460/淘宝:一. CAN总线的特点和历史●什么是CAN?CAN,全称为“Controller Area Network”,即控制器局域网,是国际上应用最广泛的现场总线之一。
最初,CAN被设计作为汽车环境中的微控制器通讯,在车载各电子控制装置ECU 之间交换信息,形成汽车电子控制网络。
比如:发动机管理系统、变速箱控制器、仪表装备、电子主干系统中,均嵌入CAN控制装置。
一个由CAN 总线构成的单一网络中,理论上可以挂接无数个节点。
实际应用中,节点数目受网络硬件的电气特性所限制。
飞思卡尔Freescale TSS 2.5 Kinetis预览版触摸传感软件说明书
Freescale Touch Sensing Software 2.5 Kinetis PreviewRelease NotesPRODUCT: Freescale TSSPRODUCT VERSION: 2.5 Kinetis PreviewDESCRIPTION: Freescale Touch Sensing Software Library, version 2.5RELEASE DATE: November 9th 2010How to Reach Us:Home Page:Web Support:/supportUSA/Europe or Locations Not Listed: Freescale Semiconductor, Inc. Technical Information Center, EL516 2100 East Elliot RoadTempe, Arizona 852841-800-521-6274 or +1-480-768-2130 /supportEurope, Middle East, and Africa: Freescale Halbleiter Deutschland GmbH Technical Information Center Schatzbogen 781829 Muenchen, Germany+44 1296 380 456 (English)+46 8 52200080 (English)+49 89 92103 559 (German)+33 1 69 35 48 48 (French)/supportJapan:Freescale Semiconductor Japan Ltd.HeadquartersARCO Tower 15F1-8-1, Shimo-Meguro, Meguro-ku,Tokyo 153-0064Japan0120 191014 or +81 3 5437 9125***************************Asia/Pacific:Freescale Semiconductor China Ltd.Exchange Building 23FNo. 118 Jianguo RoadChaoyang DistrictBeijing 100022China+86 10 5879 8000**************************For Literature Requests Only:Freescale Semiconductor Literature Distribution Center P.O. Box 5405Denver, Colorado 802171-800-441-2447 or +1-303-675-2140Fax: +1-303-675-2150*********************************************Information in this document is provided solely to enable system and software implementers to use Freescale Semiconductor products. There are no express or implied copyright licenses granted hereunder to design or fabricate any integrated circuits or integrated circuits based on the information in this document.Freescale Semiconductor reserves the right to make changes without further notice to any products herein. Freescale Semiconductor makes no warranty, representation or guarantee regarding the suitability of its products for any particular purpose, nor does Freescale Semiconductor assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation consequential or incidental damages. “Typical” parameters that may be provide d in Freescale Semiconductor data sheets and/or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals”, must be validated for each customer application by customer’s technical experts. Freescale Semiconductor does not convey any license under its patent rights nor the rights of others. Freescale Semiconductor products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or other applications intended to support or sustain life, or for any other application in which the failure of the Freescale Semiconductor product could create a situation where personal injury or death may occur. Should Buyer purchase or use Freescale Semiconductor products for any such unintended or unauthorized application, Buyer shall indemnify and hold Freescale Semiconductor and its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claim alleges that Freescale Semiconductor was negligent regarding the design or manufacture of the part.Freescale™ and the Freescale logo are trademarks of Freescale SemiconductorAll other product or service names are the property of their respective owners. © Freescale Semiconductor, Inc. 2009. All rights reserved.Rev. 611/2010Table of Contents1 Introduction (3)1.1 Requirements (3)1.1.1 System Requirements (3)1.1.2 Target Requirements (3)1.2 Special Instructions (4)1.2.1 Installation Instructions (4)2 Release Content (5)2.1 Example Applications (5)3 New Features (6)4 Release Description (7)4.1 Supported Features (7)4.2 Limitations (7)5 Release History (8)1 IntroductionThis document describes the Freescale Touch Sensing Software (TSS) version 2.5 released for ARM®Cortex™-M4 Kinetis processor family.This is the preview version of the TSS 2.5 library for the Kinetis family. It is based on and is backward compatible with TSS version 2.0. The features described here are not ported back to HCS08 and ColdFire® V1 platforms. A full TSS 2.5 release will bring the new library features to all Kinetis, HCS08, and ColdFire® V1 platforms.1.1 Requirements1.1.1 System RequirementsThe ARM®Cortex™-M4 version of the library was developed, compiled and tested with IAR Embedded Workbench for ARM Version 5.50.6 and Version 6.10.The system requirements are defined by the development tools requirements. There are no special host system requirements for hosting the Freescale TSS distribution.Minimum PC configuration:▪As required by CodeWarrior® Development StudioRecommended PC configuration:▪ 2 GHz processor – 2 GB RAM - 2 GB free disk spaceSoftware requirements:▪OS: As required by development tools (Windows XP SP2 or later recommended)1.1.2 Target RequirementsThe Freescale TSS in this release supports the ARM®Cortex™-M4 families of microcontrollers. The requirements for the target hardware are same as the operating requirement of your evaluation or custom board (power supply, cabling, jumper settings etc).There are physical parameters that directly affect the Touch Sensing performance like electrodes design, PCB routing, parasitic capacitance at processor pins etc. Refer to appropriate Application Notes related to the software-based capacitive measurements available on/touchsensing .This release of Freescale TSS contains application examples for the following boards:TWR-K60N512 Tower board with MK60N512TWR-K40X256 Tower board with MK40X256The boards are available for purchase at Freescale web site.1.2 Special Instructions1.2.1 Installation InstructionsRun the self-extracting executable and proceed according to instructions on the screen. Refer to Touch Sensing Software User Guide available in the Start/Programs menu after installation.2 Release ContentThis is release version 2.5 of the Freescale Touch Sensing Software. The content is described in the following table.The following picture shows the Freescale TSS directories installed to the user host computer:2.1 Example ApplicationsExample applications are included in the library distribution in the examples folder.- twrk60n512 demo application for the TWR-K60N512 board servicing all four electrodes ofthe board and demonstrating use of Keypad decoder. TSI module is used for electrode sensing. Touch status of each electrode is indicated by LED placed inside the electrode area. The application is available in the /examples/TWRKXX_DEMO folder. - twrk40x256 demo application for the TWR-K40X256 board servicing all four electrodes ofthe board and demonstrating use of Keypad decoder. TSI module is used for electrode sensing. Touch status of each electrode is indicated by LED placed inside the electrode area. The application is available in the /examples/TWRKXX_DEMO folder.--- Documentation--- Configuration examples and example applications--- TSS Library Files --- PC Host Tools3 New FeaturesFreescale is committed to maintain this product and to deliver updates and enhancements timely. This section describes the major changes and new features implemented in this release.In comparison to version 2.0, the TSS 2.5 Kinetis Preview release implements the following features:-TSS Libraryo ARM®Cortex™-M4 support added. The TSS_ARM.a precompiled library for ARM®Cortex™-M4 was added into the lib directory.o Touch Sense Input (TSI) hardware module added. The module enables robust hardware-driven capacitance measurements to be performed without CPU intervention.The TSS library has been reworked to enable such a “background” processing andsave CPU time and power consumption.o GPIO (ATL, CTS) and other low-level layer sensing algorithms are still available in the TSS library and may be used to detect touch on electrodes connected to non-TSI pins.o TSI active mode clock configuration parameters added into the TSS_SystemSetup.h file.o TSI bit-resolution parameter (TSS_TSI_RESOLUTION) added into theTSS_SystemSetup.h file. The TSS code automatically manages the TSI moduleruntime configuration to achieve the desired resolution.o ATL and CTS low-level layer sensing algorithms are no longer mutually exclusive. The CTS method can be applied to the selected electrodes just like an ordinary methodadditional to GPIO, TSI, and other. The electrode type is set up in theTSS_SystemSetup.h file.o The TSS low-level layer now enables to use the following methods: GPIO, CTS and TSI. The other methods (PTI, KBI, TPM, FTM) known from TSS 2.0 will be supported inthe follow up library version. Selection of the electrode type is performed inTSS_SystemSetup.h by the TSS_En_Type macro.o Various trigger mechanisms are added. A new automatic trigger may help to achieve periodic electrode sampling and let the TSI module to drive the period also for non-TSIelectrodes. In addition to the automatic trigger, two manual triggers may be used toreduce complexity of conditional execution of TSS_Task when any kind of periodicity isrequired.o Source code files are renamed and the code is refactored:-A TL_SENSOR_TIMEOUT and ATL_SENSOR_PRESCALER macros a renamed toTSS_SENSOR_TIMEOUT and TSS_SENSOR_PRESCALER.-A TL_Timer.h file renamed to TSS_Timer.h file.-M acros with ATL_HW_TIMER_ prefix were renamed to use TSS_HW_TIMER_prefix in TSS_Timer.h file.-A TL_Sensor.h and ATL_Sensor.c files renamed to TSS_Sensor.h andTSS_Sensor.c.-I nterrupt handlers for the low level layer methods moved to the appropriateTSS_SensorXXX.c which enables to assign interrupt vector number automatically.4 Release Description4.1 Supported Features-TSI HW module support for ARM®Cortex™-M4 Kinetis processors.-Software-only capacitive touch sensing for. ARM®Cortex™-M4 Kinetis processors.-Backward compatibility with TSS 1.x and 2.0.-Easy to use and integrate with existing user applications.-Electrode malfunction detection.-Support for up to 64 electrodes.-Compile-time configurable using a single header file (at user application level).-Graphical System Setup Creator utility to help creating the configuration header file.-Several touch-detection and capacity measurement algorithms available:o TSI, GPIO, CTS.-Advanced Key Detector signal processing layer.-Decoded signals available to user application.-Easy to use decoding structures with callback event notification.o Keypad – keyboard decoder supporting multiple key press and auto-repeat.o Slider – handling linearly distributed electrodes as a single up-down or left-right control.o Rotary – handling ring-distributed electrodes as a single jog-dial-like control.-Supports up to 16 instances of decoding controls.4.2 Limitations-This is the Kinetis Preview version of the library only. New features are not available to HCS08 and ColdFire® V1 platforms.-TSI and GPIO are the only available sampling methods. The pin interrupt and timer input capture methods will be implemented in the future library version.-Advanced Low Power and Wake-up features of the TSI module are not enabled in the current library version.5 Release HistoryVersion 1.0 (September 21st 2009)-First public release of the library with an example for LG32-based TSSEVB Rev.B evaluation board.Version 1.1 (January 27th 2010)-TSS.libo Baseline Tracking bug fixed. The baseline was updated slowly in case of negative delta value.o TSS_ERROR_KEYPAD_NOT_IDLE state removed from TSS Keypad Decoder.o DC Tracker init value changed from 64 to 100.o Number of CTS measurements allowed to be interrupted by user application before a timeout occurs was increased from 20 to 128.o Setting the System Reset bit in the TSS System Configuration Register makes TSS to restart immediately.o atl_u8SampleIntFlag variable definition moved from ATL_Sensor.h to C code.-TSSEVB_SINGLE application exampleo I2CDvr.c file updated so the sensitivity can be set from EGT.-TSSEVB_DEMO application exampleo I2CDvr.c file updated so the sensitivity can be set from EGT.o BUSclk changed to 20 MHz if CTS sensing algorithm selected. This enhances algorithm sensitivity.o SCI baud rate setting fixed since 20MHz bus clock is used with CTS sensing algorithm selected. Needed to properly communicate with COMM JM60 device.o Electrodes Sensitivity changed for Washing Machine demo application if CTS sensing algorithm selectedVersion 2.0 (August 23rd 2010)o ColdFire® V1 support added. The TSS.lib precompiled library for HCS08 family was renamed to TSS_S08.lib and the TSS_CFV1.a precompiled library for ColdFire® V1was added into the same directory.o The IIR filter feature was implemented at the Key detector level. The filter processes capacitance values obtained from low-level routines and works with both ATL and CTSalgorithms. Use of this feature is optional, enable it in TSS_SystemSetup.h.o The Noise Amplitude Filter function was implemented in the ATL and CTS low level.The user can define the noise amplitude to be filtered. Noise peaks greater than thedefined amplitude are filtered by the system, thus disregarding the noisy sample. Useof this feature is optional; enable it in TSS_SystemSetup.h together with setting theNoise Amplitude Filter sizes for each electrode.o The SWI feature which can be enabled in the TSS registers is available only for HCS08 version of the TSS library. The OnFault callback feature was added to enable handlingof a fault situation on both HCS08 and ColdFire® V1 processors. Specify name ofapplication callback function as the TSS_ONFAULT_CALLBACK parameter in theTSS_SystemSetup.h file.o Baseline balancing algorithm was simplified in the Key detector code.o The ATL low level layer now enables to use also GPIO Port Interrupt, KBI and TPM Input Capture modules to improve sensitivity. Use of this feature is optional, enable it in TSS_SystemSetup.h.o New TSS_Task “sequencing” feature enables to divide task processing to several steps where each electrode is acquired in separate TSS_TaskSeq call. When all electrodesare processed, the decoders are handled all at once in the last TSS_TaskSeq call.o Default electrode pin state was changed to logic-high when measurement is idle. This helps to achieve lower power consumption in low power modes. The only exception isthat a pin is set to logic-low state when timer timeout occurs (electrode charge timeout).Timeout may be a symptom of short-grounded electrode, so setting the output pin tologic low prevents high current sourced from pin and achieves lower powerconsumption.o ATL_SENSOR_TIMEOUT and ATL_SENSOR_PRESCALER macros were moved to TSS_SystemSetup.h and are now configurable. Default value ofATL_SENSOR_TIMEOUT was set to 511, ATL_SENSOR_PRESCALER was set to 2.o Macros with ATL_TIMER_ prefix were renamed to use ATL_HW_TIMER_ prefix in ATL_Timer.h in order to differentiate it from ATL_IC_TIMER_macros used for TimerInput Capture method.o ATL HW Timer Interrupt handler moved from inside of library to the ATL_Sensor.c which enables to assign interrupt vector number automatically.o GPIO Pin Interrupt-based measurement method added.o FTM timer support added.o The type of ATL Low Level routine return value was changed from UINT8 to UINT16, making it more general for large capacitance differences between electrodes.o The ATL_ElectrodesSetState function code was reduced in size and was renamed to ATL_ElectrodesSetStateHigh. The function now only sets all electrodes to logic output-high state as this is the only stat really used.o Checking of Fault timeout and the u8FaultCnt counter variable was added to ATL_SampleElectrode function. The timeout is set by macro ATL_FAULT_TIMEOUT in ATL_Sensor.h.o Fixed issues:-When more than seven controls were used, the tss_cau8BuffMask[] array inTSS_SystemSetupData.c was not defined properly.-Removed warning messages when no control is used. The tss_pau8EventsBuff[] andtss_acpsCSStructs[] arrays were not correctly defined in TSS_SystemSetupData.c.-Removed redundant Warning messages if Slew Rate and Strength registers do notexist.-TSSEVB_SINGLE application exampleFreescale TSS Release NotesFreescale Semiconductor 10 o ATL_SENSOR_TIMEOUT and ATL_SENSOR_PRESCALER macros were moved toTSS_SystemSetup.h. Macro ATL_HW_TIMER_TIMEOUT set to 1023,ATL_SENSOR_PRESCALER set to 2.o ATL_TimerIsr vector assignment removed from .prm file. This is now doneautomatically by the TSS library code.- TSSEVB_DEMO application exampleo ATL_SENSOR_TIMEOUT and ATL_SENSOR_PRESCALER macros were moved toTSS_SystemSetup.h. Macro ATL_HW_TIMER_TIMEOUT set to 1023,ATL_SENSOR_PRESCALER set to 2.o ATL_TimerIsr vector assignment removed from .prm file. This is now doneautomatically by the TSS library code.o Electrode pins where an alternative KBI or TPM channel feature is available werereconfigured in TSS_SystemSetup.h to use new type of measurement.- Processor Expert supportProcessor Expert TSS Component v1.0 included in the form of PEupd package. Thecomponent may help to configure the TSS library in an easy to use graphical environment.Version 2.5 (Kinetis Preview 9th 2010)- TSI module added.- Library implementation for the ARM ®Cortex™-M4 Kinetis processor family.- Demo applications provided for TWR-K60n512 and TWR-K40x256 boards. For details, referto New Features .。
卡林技术公司产品说明书

UL Recognized UL Standard 1077Component Recognition Program as Protectors,Supplementary (Guide QVNU2,File E75596)UL Standard 508Switches,Industrial Control (Guide NRNT2,File E148683)CSA CertifiedComponent Supplementary Protector under Class 3215 30,FIle 047848 0 000CSA Standard C22.2 No. 235VDE CertifiedEN60934,VDE 0642 under File No.10537Agency CertificationsNotes for T able A:1DC and 1Ø 277 Volt ratings are 1 or 2 poles breaking. 3Ø Ratings are 3 poles breaking.2 Requires branch circuit backup with a UL LISTED Type K5 or RK5 fuse rated 15A minimum and no more than 4 times full load amps not to exceed 150A for 250 Volt rating and 125A for 277and 480 Volt ratings.3 UL Recognition and CSA Certification at 480 Volts refers to 3 and 4 pole versions, used only in a 3Ø wye connected circuit or 2 pole versions connected with 2 poles breaking 1Ø and backedup with series fusing per note 2.Table A:Lists UL Recognized and CSA and VDE Certified configurations and performance capabilities as a Component Supplementary Protector.ElectricalCURRENT RA TINGCIRCUITMAX FULL LOAD WITH WITHOUT (Inc) WITH (Icn) WITHOUTCONFIGURA TIONRA TINGFREQUENCYPHASEAMPSBACKUP FUSEBACKUP FUSEBACKUP FUSEBACKUP FUSE65DC ---0.02 - 50 ---500050001500125/25050/60 1 and 30.02 - 50 ---3000 --- ---25050/60 1 and 30.02 - 505000 ---5000150027750/6010.02 - 505000 --- --- ---480 Y 50/60 1 and 30.02 - 305000---------65DC ---0.02 - 5025050/60 1 and 30.02 - 5027750/6010.02 - 50480 Y50/6030.02 - 30480 Y 50/6010.02 - 30SWITCH ONL Y UL / CSAVDED-SERIES TABLE A: COMPONENT SUPPLEMENTARY PROTECTORVOLT AGEINTERRUPTING CAPACITY (AMPS)SERIESDesigned for snap-on-back panel rail mounting on either a 35mm x 7.5mm, or a 35mm x 15mm Symmetrical Din Rail,allowing rapid and simple mounting and removal of the breaker.It features recessed, wire-ready, touch-proof, shock-resistant ter-minals, suitable for automatic screwdriver assembly, as well as "Dead Front" construction characteristics.Available with a Visi-Rocker two-color actuator, which can be specified to indicate either the ON or the TRIPPED/OFF mode,or solid color rocker or handle type actuators. All actuator types fit in the same industry standard panel cutouts.0.02 - 50 amps, up to 480 VAC or 65 VDC, 1 - 4 poles (Handle),1 - 3 poles (Rocker), with a choice of time delays.Number of PolesRocker Type: 1-3; Handle Type: 1-4 Internal Circuit Config. Switch Only and Series Trip with cur-rent or voltage trip coils.WeighApproximately 128 grams/pole (Approximately 4.57 ounces/pole)Standard Colors Housing - Black; Actuator - See Ordering Scheme.MountingMounts on a standard 35mmSymmetrical DIN Rail (35 x 7.5 or 35x 15mm per DIN EN5002).MechanicalElectricalPhysicalEndurance10,000 ON-OFF operations @ 6 per minute; with rated Current and Voltage.Trip FreeAll D-Series Circuit Breakers will trip on overload,even when actuator is forcibly held in the ON position.Trip IndicationThe operating actuator moves posi-tively to the OFF position when an overload causes the breaker to trip.Designed and tested in accordance with requirements of specifi-cation MIL-PRF-55629 & MIL-STD-202 as follows:Shock Withstands 100 Gs,6ms,sawtoothwhile carrying rated current per Method 213,Test Condition "I".Instantaneous and ultra-short curves tested @ 90% of rated current.Vibration Withstands 0.060" excursion from10-55 Hz,and 10 Gs 55-500 Hz,at rated current per Method 204C,Test Condition A. Instantaneous and ultra-short curves tested at 90% of rated current.Moisture Resistance Method 106D,i.e.,ten 24-hourcycles @ + 25°C to +65°C,80-98%RH.Salt Spray Method 101,Condition A (90-95%RH @ 5% NaCl Solution,96 hrs).Thermal Shock Method 107D,Condition A (Fivecycles @ -55°C to +25°C to +85°C to +25°C).Operating Temperature -40°C to +85°CEnvironmental020 0.0200250.0250300.0300500.050075 0.0750800.0800850.0852100.1002150.1502200.2002250.2502300.3002350.3502400.4002450.450250 0.5002550.5502600.6002650.6502700.7002750.7502800.8002850.850410 1.000512 1.250413 1.300414 1.400415 1.500517 1.750420 2.000522 2.250425 2.500527 2.750430 3.000532 3.250435 3.500436 3.600440 4.000445 4.500547 4.750450 5.000455 5.500460 6.000465 6.5004707.0005727.2504757.5004808.0004858.5004909.0004959.500610 10.00071010.50061111.00071111.50061212.00071212.50061313.00061414.000615 15.00061616.00061717.00061818.00061919.00062020.00062121.00062222.000623 23.00062424.00062525.00062626.00062727.00062828.00062929.00063030.00063232.00063535.00064040.00064545.00065050.000A06 6 DC, 5 DC A1212 DC, 10 DC A1818 DC, 15 DC A2424 DC, 20 DC A3232 DC, 25 DC A4848 DC, 40 DC A6565 DC, 55 DC J06 6 AC, 5 AC J1212 AC, 10 AC J1818 AC, 15 ACJ2424 AC, 20 AC J4848 AC, 40 AC K20120 AC, 65 AC L40240 AC, 130 AC10Agency Approval8Actuator Color8 ACTUATOR COLOR & LEGEND Actuator orVisi-Color Marking: Marking Color: Single Color Visi-Rocker Color:I-O ON-OFF Dual Rocker/Handle (Actuator Black)8White A B 1Black White Black C D 2White n/a Red F G 3White Red Green H J 4White Green Blue K L 5White Blue Y ellow M N 6Black Y ellow Gray P Q 7Black Gray OrangeRS8Black Orange10 AGENCY APPROVAL C UL Recognized & CSA Certified D VDE Certified, UL Recognized & CSA Certified9 MOUNTING/VOLTAGEMOUNTING STYLE VOLTAGE Threaded Insert 16-32 x 0.195 inches< 300C 96-32 X 0.195 inches ≥300 2ISO M3 x 5mm< 300D 9ISO M3 x 5mm ≥3007 TERMINAL1#10 Screw & Pressure Plate for Direct Wire Connection 2#10 Screw without Pressure Plate3 POLES 1One2Two 3Three4Four5 FREQUENCY & DELA Y 03DC 50/60Hz, Switch Only 105DC Instantaneous 11DC Ultra Short 12DC Short 14DC Medium 16DC Long20550/60Hz Instantaneous 2150/60Hz Ultra Short 2250/60Hz Short 2450/60Hz Medium2650/60Hz Long32DC, 50/60Hz Short 34DC, 50/60Hz Medium 36DC, 50/60Hz Long42650/60Hz Short, Hi-Inrush 44650/60Hz Medium, Hi-Inrush 46650/60Hz Long, Hi-Inrush 527DC, Short,Hi-Inrush 547DC,Medium, Hi-Inrush 567DC, Long, Hi-Inrush4 CIRCUITA0 Switch Only (No Coil) 4B0Series Trip (Current)C0Series Trip (Voltage)1 SERIES D6Current Rating4Circuit3Poles2Actuator9Mounting/Voltage7Terminal5Frequency & Delay1SeriesNotes:1 Handle breakers available up to four poles. Rocker breakers available up to three poles.2Actuator Code:A: Multi-pole units factory assembled with common handle tie.B: Handle location as viewed from front of breaker:2 pole - left pole3 pole - center pole4 pole - two handles at center poles3Multipole rocker breakers have one rocker per breaker, as viewed from the front of thepanel. Two pole - left pole. Three pole - center pole 4≤30A, select Current Rating code 630. 31-50A, select Current Rating code 650.5Voltage coil only available with delay codes 10 & 20.6Available to 50A max with circuit code BO only.7Available to 50A (UL/CSA), 30A (VDE) with circuit code BO only.8Color shown is visi and legend with remainder of rocker black.9≥300V: Three pole breaker 3Ø or 2 pole breaker 1Ø, UL/CSA limited to 30 FLA max.10VDE Approval requires Dual (I-O, ON-OFF) or I-O markings6 CURRENT RATING (AMPERES)OR VOLTAGE COIL (VOLTS, MIN. TRIP RATING)5P0LE 3P0LE 2P0LE 1SERIES TRIP (2 TERM'S.)LINELINEROCKER ACTUATOR INDICATE "ON"HANDLE ACTUATORSWITCH ONL Y (2 TERM'S.)#10-32 SCREW AND PRESSURE PLA TE PER TERMINAL"MULTI-POLE IDENTIFICATION SCHEMENotes:1All dimensions are in inches [millimeters].2T olerance ±.015 [.38] unless otherwise specified.3-POLE(DF3) 3-POLE(DC3)REMOVALASSEMBL YNotes:1All dimensions are in inches [millimeters].2T olerance ±.015 [.38] unless otherwise specified.3Dimensions apply to all variations shown. Notice that circuit breaker line and load termi-nal orientation on indicate OFF is opposite of indicate ON.4For pole orientation with horizontal legend, rotate front view clockwise 90°.Notes:1All dimensions are in inches [millimeters].2T olerance ±.010 [.25] unless otherwise specified.。
LIN总线物理接口器件MC33399的原理及应用说课讲解

L I N总线物理接口器件M C33399的原理及应用LIN总线物理接口器件MC33399的原理及应用摘要:MC33399是Frescale公司推出的汽车LIN总线单线物理接口器件。
文中详细介绍了MC33399的主要功能、内部结构以及工作原理,并在此基础上给出了MC33399的典型应用电路。
关键词:MC33399 LIN总线汽车电子1 概述LIN(Local Interconnect Network局域互连网络)是一种低成本的总线网络。
其最初的开发目的在于弥补CAN总线的不足,主要用于汽车中某些对通信速率要求不高的场合,LIN总线作为CAN总线的辅助网络或子网络使用可以解决汽车内因导线过多所带来的许多问题。
一个简单的LIN节点除了微控制器外,还需要两个芯片,即LIN接口芯片和5V 的电压调节器。
Freescale公司的MC33399芯片是专用于LIN的单线物理接口器件。
该器件的功耗非常低,可控制外部稳压器,安全符合LIN规范,抗干扰能力强,是一种高性能的模拟器件,适用于工作环境比较复杂的汽车。
MC33399的主要特点如下:·通信速率范围为1~20kb/s;·额定工作电压:8V~18V,正常电压:7V~27V;·无功节点不影响总线状态;·有正常和睡眠两种工作模式,睡眠模式下的静态电流仅20μA;·LIN总线唤醒、MCU命令唤醒以及接口外部高压开关输入唤醒;·通过兼容的CMOS I/O脚与MCU进行接口;·带有外部稳压器控制功能;·内置上拉电阻;·LIN引脚的ESD电压可达4kV;·具有很好的电磁兼容性;·工作温度范围为-40℃~125℃。
2 引脚功能MC33399采用SO8型贴片式封装。
图1示出引脚排列,各引脚的功能说明如表1所列。
表1 MC33399的引脚功能引脚号引脚名功能1 RX 接收数据输出端2 EN 使能端3 Wake 唤醒端,用于将芯片从睡眠中唤醒4 TX 发送数据输入端5 GND 电源地6 LIN LIN总线接口端7 Vsup 电源8 INH 外部稳压器控制端3 内部结构及工作原理MC33399的内部结构框图如图2所示。
飞思卡半导体 微控制器系列MC9S08QE128 8位 產品說明書

目標應用• 健康監測儀器• 中央空調及樓宇控制 • 煤氣表、水錶及暖氣表• 監控攝像機 • 數碼相機• 測量設備概述Flexis TM 系列控制器是“飛思卡爾控制器聯合體”(Freescale Controller Continuum)中的連接點,它使8位和32位產品的兼容成為現實。
Flexis系列包括可相互替換的8位S08和32位ColdFire ® V1微控制器系列產品,它們采用相同的外圍設備和開發工具,從而可以提供最大的移植靈活性。
QE系列產品由一對器件組成,它們管腳兼容,一個是8位,另一個是32位;它是Flexis系列中的首個產品族。
S08QE128器件拓展了8位微處理器的性能,達到128KB的閃存和24通道的12位模數轉換器(ADC)。
S08QE128還有高達3.6V的電源電壓、50 MHz的CPU內核和三個定時器,可改善電機控制性能,非常適用于健康監測儀器及其他電子產品,如數碼相機和網絡攝像頭等。
8位的S08QE128在管腳、外圍設備和工具等各方面都與32位的MCF51QE128互相兼容,這為它們的各方面性能都提供了前所未有的設計自由度。
Flexis TM 微控制器系列MC9S08QE1288位產品說明書使用外圍設備長電池使用壽命• 新的ULP電源等待模式• Stop3模式下6 µs的典型喚醒時間• 由內部或外部參考時鐘控制,包含鎖頻環(FLL)的內部時鐘源(ICS)模塊• 無需使用外部時鐘源。
這將從根本上降低系統開發成本。
• 閉環控制皮爾斯振蕩器(OSC);31.25 kHz到38.4kHz或1 MHz到16 MHz的晶振或陶瓷振蕩器• 具有在低功耗模式下提供精確時基的超低功耗振蕩器Freescale TM 和Freescale標識是飛思卡爾半導體公司的注冊商標。
所有其它產品和服務的名稱均為各自所有者的財產。
©飛思卡爾半導體公司2007年版權所有。
文件編號:MC9S08QE128FSREV 0• • 相同的硬件連接器• 斷點設置• 在線調試過程中可設置一個斷點設置(外加內置調試模塊中的另三個斷點)• 包含三個比較器和九種觸發方式的ICE調試模塊。
液晶弹性体

3. Actuators based on LCEs
3.1. Actuators based on thermally actuated LCEs
Fig 3. Micrometer-sized nematic LCE actuators consisting of a pillar array. (a) Experimental setup used to prepare the responsive pillars. (b) Top view (under an optical microscope) of the pillar pattern obtained by the imprint in the nematic liquid crystal elastomer. (Inset) Zoom on the structure (pillar diameter=20mm)[1]. [1 ]Buguin A, Li M H, Silberzan P, et al. Journal of the American Chemical Society, 2006, 128(4): 1088-1089.
4. Summary
1.Introduction
Smart materials:
There is a group of materials capable of responding to external stimuli with mechanical deformation.
Fig 1. The diferent kinds of actuator materials both in natural and synthetic systems
3. Actuators based on LCEs
MC3361-中频接收IC
电特性
静态电流(无信号)
音频输出电压 输入限幅电压 失真度 录音输出噪声电压 电压下降 AF 增益损耗 检波输出电阻 信噪比 滤波器增益 滤波器输出直流电压 静噪低阻抗 静噪高阻抗 扫描控制低电平 扫描控制高电平 触发迟滞 混频器转换增益 混频器输入电阻 混频器输入电容
符号 ICC1 ICC2 VOUT VIN(Lim) THD VNO ∆Gv ROUT S/N Gv VO(DC) RON(Mute) ROff(Mute) VL(Scan) VH(Scan) VTH GV(Mix) Ri(Mix) Ci(Mix)
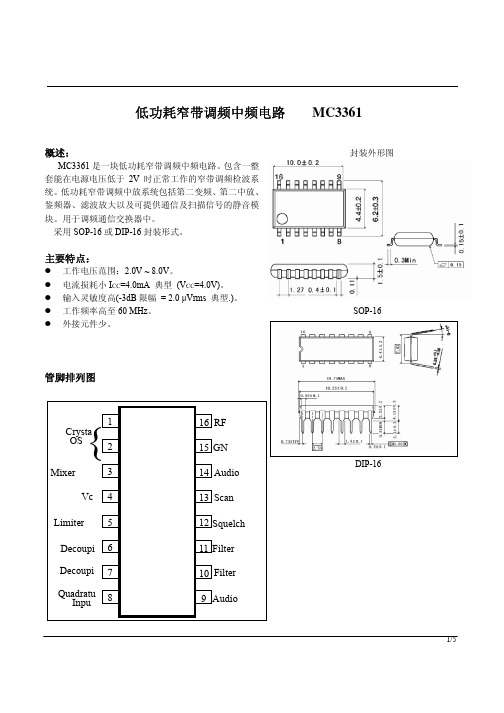
低功耗窄带调频中频电路 MC3361
概述:
MC3361 是一块低功耗窄带调频中频电路。包含一整 套能在电源电压低于 2V 时正常工作的窄带调频检波系 统。低功耗窄带调频中放系统包括第二变频、第二中放、 鉴频器、滤波放大以及可提供通信及扫描信号的静音模 块。用于调频通信交换器中。
采用 SOP-16 或 DIP-16 封装形式。
1 0. 2 45 MHz
CFU 455D
Vc c
220pF FL1 0 . 1u F
50K 0 . 1u F
52K 20K 0 . 1u F
3/5
应用图
MC3361
特性曲线
4/5
MC3361
5/5
电特性
符号 Vcc(MAX)
Vcc VIN(DET) VIN(RF) VMUTE
Topr Tstg
数值 10
2.0~8.0 1.0 1.0
-0.5~+5.0 -20~+70 -65~150
单位 V V
Vp-p Vrms Vpeak
°C °C
电特性 (若无其它规定,Ta=25°C, Vcc=4V, fo=10.7MHz, fm=1kHz, ∆f=±3kHz)
Native Instruments MASCHINE MIKRO MK3用户手册说明书

The information in this document is subject to change without notice and does not represent a commitment on the part of Native Instruments GmbH. The software described by this docu-ment is subject to a License Agreement and may not be copied to other media. No part of this publication may be copied, reproduced or otherwise transmitted or recorded, for any purpose, without prior written permission by Native Instruments GmbH, hereinafter referred to as Native Instruments.“Native Instruments”, “NI” and associated logos are (registered) trademarks of Native Instru-ments GmbH.ASIO, VST, HALion and Cubase are registered trademarks of Steinberg Media Technologies GmbH.All other product and company names are trademarks™ or registered® trademarks of their re-spective holders. Use of them does not imply any affiliation with or endorsement by them.Document authored by: David Gover and Nico Sidi.Software version: 2.8 (02/2019)Hardware version: MASCHINE MIKRO MK3Special thanks to the Beta Test Team, who were invaluable not just in tracking down bugs, but in making this a better product.NATIVE INSTRUMENTS GmbH Schlesische Str. 29-30D-10997 Berlin Germanywww.native-instruments.de NATIVE INSTRUMENTS North America, Inc. 6725 Sunset Boulevard5th FloorLos Angeles, CA 90028USANATIVE INSTRUMENTS K.K.YO Building 3FJingumae 6-7-15, Shibuya-ku, Tokyo 150-0001Japanwww.native-instruments.co.jp NATIVE INSTRUMENTS UK Limited 18 Phipp StreetLondon EC2A 4NUUKNATIVE INSTRUMENTS FRANCE SARL 113 Rue Saint-Maur75011 ParisFrance SHENZHEN NATIVE INSTRUMENTS COMPANY Limited 5F, Shenzhen Zimao Center111 Taizi Road, Nanshan District, Shenzhen, GuangdongChina© NATIVE INSTRUMENTS GmbH, 2019. All rights reserved.Table of Contents1Welcome to MASCHINE (23)1.1MASCHINE Documentation (24)1.2Document Conventions (25)1.3New Features in MASCHINE 2.8 (26)1.4New Features in MASCHINE 2.7.10 (28)1.5New Features in MASCHINE 2.7.8 (29)1.6New Features in MASCHINE 2.7.7 (29)1.7New Features in MASCHINE 2.7.4 (31)1.8New Features in MASCHINE 2.7.3 (33)2Quick Reference (35)2.1MASCHINE Project Overview (35)2.1.1Sound Content (35)2.1.2Arrangement (37)2.2MASCHINE Hardware Overview (40)2.2.1MASCHINE MIKRO Hardware Overview (40)2.2.1.1Browser Section (41)2.2.1.2Edit Section (42)2.2.1.3Performance Section (43)2.2.1.4Transport Section (45)2.2.1.5Pad Section (46)2.2.1.6Rear Panel (50)2.3MASCHINE Software Overview (51)2.3.1Header (52)2.3.2Browser (54)2.3.3Arranger (56)2.3.4Control Area (59)2.3.5Pattern Editor (60)3Basic Concepts (62)3.1Important Names and Concepts (62)3.2Adjusting the MASCHINE User Interface (65)3.2.1Adjusting the Size of the Interface (65)3.2.2Switching between Ideas View and Song View (66)3.2.3Showing/Hiding the Browser (67)3.2.4Showing/Hiding the Control Lane (67)3.3Common Operations (68)3.3.1Adjusting Volume, Swing, and Tempo (68)3.3.2Undo/Redo (71)3.3.3Focusing on a Group or a Sound (73)3.3.4Switching Between the Master, Group, and Sound Level (77)3.3.5Navigating Channel Properties, Plug-ins, and Parameter Pages in the Control Area.773.3.6Navigating the Software Using the Controller (82)3.3.7Using Two or More Hardware Controllers (82)3.3.8Loading a Recent Project from the Controller (84)3.4Native Kontrol Standard (85)3.5Stand-Alone and Plug-in Mode (86)3.5.1Differences between Stand-Alone and Plug-in Mode (86)3.5.2Switching Instances (88)3.6Preferences (88)3.6.1Preferences – General Page (89)3.6.2Preferences – Audio Page (93)3.6.3Preferences – MIDI Page (95)3.6.4Preferences – Default Page (97)3.6.5Preferences – Library Page (101)3.6.6Preferences – Plug-ins Page (109)3.6.7Preferences – Hardware Page (114)3.6.8Preferences – Colors Page (114)3.7Integrating MASCHINE into a MIDI Setup (117)3.7.1Connecting External MIDI Equipment (117)3.7.2Sync to External MIDI Clock (117)3.7.3Send MIDI Clock (118)3.7.4Using MIDI Mode (119)3.8Syncing MASCHINE using Ableton Link (120)3.8.1Connecting to a Network (121)3.8.2Joining and Leaving a Link Session (121)4Browser (123)4.1Browser Basics (123)4.1.1The MASCHINE Library (123)4.1.2Browsing the Library vs. Browsing Your Hard Disks (124)4.2Searching and Loading Files from the Library (125)4.2.1Overview of the Library Pane (125)4.2.2Selecting or Loading a Product and Selecting a Bank from the Browser (128)4.2.3Selecting a Product Category, a Product, a Bank, and a Sub-Bank (133)4.2.3.1Selecting a Product Category, a Product, a Bank, and a Sub-Bank on theController (137)4.2.4Selecting a File Type (137)4.2.5Choosing Between Factory and User Content (138)4.2.6Selecting Type and Character Tags (138)4.2.7Performing a Text Search (142)4.2.8Loading a File from the Result List (143)4.3Additional Browsing Tools (148)4.3.1Loading the Selected Files Automatically (148)4.3.2Auditioning Instrument Presets (149)4.3.3Auditioning Samples (150)4.3.4Loading Groups with Patterns (150)4.3.5Loading Groups with Routing (151)4.3.6Displaying File Information (151)4.4Using Favorites in the Browser (152)4.5Editing the Files’ Tags and Properties (155)4.5.1Attribute Editor Basics (155)4.5.2The Bank Page (157)4.5.3The Types and Characters Pages (157)4.5.4The Properties Page (160)4.6Loading and Importing Files from Your File System (161)4.6.1Overview of the FILES Pane (161)4.6.2Using Favorites (163)4.6.3Using the Location Bar (164)4.6.4Navigating to Recent Locations (165)4.6.5Using the Result List (166)4.6.6Importing Files to the MASCHINE Library (169)4.7Locating Missing Samples (171)4.8Using Quick Browse (173)5Managing Sounds, Groups, and Your Project (175)5.1Overview of the Sounds, Groups, and Master (175)5.1.1The Sound, Group, and Master Channels (176)5.1.2Similarities and Differences in Handling Sounds and Groups (177)5.1.3Selecting Multiple Sounds or Groups (178)5.2Managing Sounds (181)5.2.1Loading Sounds (183)5.2.2Pre-listening to Sounds (184)5.2.3Renaming Sound Slots (185)5.2.4Changing the Sound’s Color (186)5.2.5Saving Sounds (187)5.2.6Copying and Pasting Sounds (189)5.2.7Moving Sounds (192)5.2.8Resetting Sound Slots (193)5.3Managing Groups (194)5.3.1Creating Groups (196)5.3.2Loading Groups (197)5.3.3Renaming Groups (198)5.3.4Changing the Group’s Color (199)5.3.5Saving Groups (200)5.3.6Copying and Pasting Groups (202)5.3.7Reordering Groups (206)5.3.8Deleting Groups (207)5.4Exporting MASCHINE Objects and Audio (208)5.4.1Saving a Group with its Samples (208)5.4.2Saving a Project with its Samples (210)5.4.3Exporting Audio (212)5.5Importing Third-Party File Formats (218)5.5.1Loading REX Files into Sound Slots (218)5.5.2Importing MPC Programs to Groups (219)6Playing on the Controller (223)6.1Adjusting the Pads (223)6.1.1The Pad View in the Software (223)6.1.2Choosing a Pad Input Mode (225)6.1.3Adjusting the Base Key (226)6.2Adjusting the Key, Choke, and Link Parameters for Multiple Sounds (227)6.3Playing Tools (229)6.3.1Mute and Solo (229)6.3.2Choke All Notes (233)6.3.3Groove (233)6.3.4Level, Tempo, Tune, and Groove Shortcuts on Your Controller (235)6.3.5Tap Tempo (235)6.4Performance Features (236)6.4.1Overview of the Perform Features (236)6.4.2Selecting a Scale and Creating Chords (239)6.4.3Scale and Chord Parameters (240)6.4.4Creating Arpeggios and Repeated Notes (253)6.4.5Swing on Note Repeat / Arp Output (257)6.5Using Lock Snapshots (257)6.5.1Creating a Lock Snapshot (257)7Working with Plug-ins (259)7.1Plug-in Overview (259)7.1.1Plug-in Basics (259)7.1.2First Plug-in Slot of Sounds: Choosing the Sound’s Role (263)7.1.3Loading, Removing, and Replacing a Plug-in (264)7.1.4Adjusting the Plug-in Parameters (270)7.1.5Bypassing Plug-in Slots (270)7.1.6Using Side-Chain (272)7.1.7Moving Plug-ins (272)7.1.8Alternative: the Plug-in Strip (273)7.1.9Saving and Recalling Plug-in Presets (273)7.1.9.1Saving Plug-in Presets (274)7.1.9.2Recalling Plug-in Presets (275)7.1.9.3Removing a Default Plug-in Preset (276)7.2The Sampler Plug-in (277)7.2.1Page 1: Voice Settings / Engine (279)7.2.2Page 2: Pitch / Envelope (281)7.2.3Page 3: FX / Filter (283)7.2.4Page 4: Modulation (285)7.2.5Page 5: LFO (286)7.2.6Page 6: Velocity / Modwheel (288)7.3Using Native Instruments and External Plug-ins (289)7.3.1Opening/Closing Plug-in Windows (289)7.3.2Using the VST/AU Plug-in Parameters (292)7.3.3Setting Up Your Own Parameter Pages (293)7.3.4Using VST/AU Plug-in Presets (298)7.3.5Multiple-Output Plug-ins and Multitimbral Plug-ins (300)8Using the Audio Plug-in (302)8.1Loading a Loop into the Audio Plug-in (306)8.2Editing Audio in the Audio Plug-in (307)8.3Using Loop Mode (308)8.4Using Gate Mode (310)9Using the Drumsynths (312)9.1Drumsynths – General Handling (313)9.1.1Engines: Many Different Drums per Drumsynth (313)9.1.2Common Parameter Organization (313)9.1.3Shared Parameters (316)9.1.4Various Velocity Responses (316)9.1.5Pitch Range, Tuning, and MIDI Notes (316)9.2The Kicks (317)9.2.1Kick – Sub (319)9.2.2Kick – Tronic (321)9.2.3Kick – Dusty (324)9.2.4Kick – Grit (325)9.2.5Kick – Rasper (328)9.2.6Kick – Snappy (329)9.2.7Kick – Bold (331)9.2.8Kick – Maple (333)9.2.9Kick – Push (334)9.3The Snares (336)9.3.1Snare – Volt (338)9.3.2Snare – Bit (340)9.3.3Snare – Pow (342)9.3.4Snare – Sharp (343)9.3.5Snare – Airy (345)9.3.6Snare – Vintage (347)9.3.7Snare – Chrome (349)9.3.8Snare – Iron (351)9.3.9Snare – Clap (353)9.3.10Snare – Breaker (355)9.4The Hi-hats (357)9.4.1Hi-hat – Silver (358)9.4.2Hi-hat – Circuit (360)9.4.3Hi-hat – Memory (362)9.4.4Hi-hat – Hybrid (364)9.4.5Creating a Pattern with Closed and Open Hi-hats (366)9.5The Toms (367)9.5.1Tom – Tronic (369)9.5.2Tom – Fractal (371)9.5.3Tom – Floor (375)9.5.4Tom – High (377)9.6The Percussions (378)9.6.1Percussion – Fractal (380)9.6.2Percussion – Kettle (383)9.6.3Percussion – Shaker (385)9.7The Cymbals (389)9.7.1Cymbal – Crash (391)9.7.2Cymbal – Ride (393)10Using the Bass Synth (396)10.1Bass Synth – General Handling (397)10.1.1Parameter Organization (397)10.1.2Bass Synth Parameters (399)11Working with Patterns (401)11.1Pattern Basics (401)11.1.1Pattern Editor Overview (402)11.1.2Navigating the Event Area (404)11.1.3Following the Playback Position in the Pattern (406)11.1.4Jumping to Another Playback Position in the Pattern (407)11.1.5Group View and Keyboard View (408)11.1.6Adjusting the Arrange Grid and the Pattern Length (410)11.1.7Adjusting the Step Grid and the Nudge Grid (413)11.2Recording Patterns in Real Time (416)11.2.1Recording Your Patterns Live (417)11.2.2Using the Metronome (419)11.2.3Recording with Count-in (420)11.3Recording Patterns with the Step Sequencer (422)11.3.1Step Mode Basics (422)11.3.2Editing Events in Step Mode (424)11.4Editing Events (425)11.4.1Editing Events with the Mouse: an Overview (425)11.4.2Creating Events/Notes (428)11.4.3Selecting Events/Notes (429)11.4.4Editing Selected Events/Notes (431)11.4.5Deleting Events/Notes (434)11.4.6Cut, Copy, and Paste Events/Notes (436)11.4.7Quantizing Events/Notes (439)11.4.8Quantization While Playing (441)11.4.9Doubling a Pattern (442)11.4.10Adding Variation to Patterns (442)11.5Recording and Editing Modulation (443)11.5.1Which Parameters Are Modulatable? (444)11.5.2Recording Modulation (446)11.5.3Creating and Editing Modulation in the Control Lane (447)11.6Creating MIDI Tracks from Scratch in MASCHINE (452)11.7Managing Patterns (454)11.7.1The Pattern Manager and Pattern Mode (455)11.7.2Selecting Patterns and Pattern Banks (456)11.7.3Creating Patterns (459)11.7.4Deleting Patterns (460)11.7.5Creating and Deleting Pattern Banks (461)11.7.6Naming Patterns (463)11.7.7Changing the Pattern’s Color (465)11.7.8Duplicating, Copying, and Pasting Patterns (466)11.7.9Moving Patterns (469)11.8Importing/Exporting Audio and MIDI to/from Patterns (470)11.8.1Exporting Audio from Patterns (470)11.8.2Exporting MIDI from Patterns (472)11.8.3Importing MIDI to Patterns (474)12Audio Routing, Remote Control, and Macro Controls (483)12.1Audio Routing in MASCHINE (484)12.1.1Sending External Audio to Sounds (485)12.1.2Configuring the Main Output of Sounds and Groups (489)12.1.3Setting Up Auxiliary Outputs for Sounds and Groups (494)12.1.4Configuring the Master and Cue Outputs of MASCHINE (497)12.1.5Mono Audio Inputs (502)12.1.5.1Configuring External Inputs for Sounds in Mix View (503)12.2Using MIDI Control and Host Automation (506)12.2.1Triggering Sounds via MIDI Notes (507)12.2.2Triggering Scenes via MIDI (513)12.2.3Controlling Parameters via MIDI and Host Automation (514)12.2.4Selecting VST/AU Plug-in Presets via MIDI Program Change (522)12.2.5Sending MIDI from Sounds (523)12.3Creating Custom Sets of Parameters with the Macro Controls (527)12.3.1Macro Control Overview (527)12.3.2Assigning Macro Controls Using the Software (528)13Controlling Your Mix (535)13.1Mix View Basics (535)13.1.1Switching between Arrange View and Mix View (535)13.1.2Mix View Elements (536)13.2The Mixer (537)13.2.1Displaying Groups vs. Displaying Sounds (539)13.2.2Adjusting the Mixer Layout (541)13.2.3Selecting Channel Strips (542)13.2.4Managing Your Channels in the Mixer (543)13.2.5Adjusting Settings in the Channel Strips (545)13.2.6Using the Cue Bus (549)13.3The Plug-in Chain (551)13.4The Plug-in Strip (552)13.4.1The Plug-in Header (554)13.4.2Panels for Drumsynths and Internal Effects (556)13.4.3Panel for the Sampler (557)13.4.4Custom Panels for Native Instruments Plug-ins (560)13.4.5Undocking a Plug-in Panel (Native Instruments and External Plug-ins Only) (564)14Using Effects (567)14.1Applying Effects to a Sound, a Group or the Master (567)14.1.1Adding an Effect (567)14.1.2Other Operations on Effects (574)14.1.3Using the Side-Chain Input (575)14.2Applying Effects to External Audio (578)14.2.1Step 1: Configure MASCHINE Audio Inputs (578)14.2.2Step 2: Set up a Sound to Receive the External Input (579)14.2.3Step 3: Load an Effect to Process an Input (579)14.3Creating a Send Effect (580)14.3.1Step 1: Set Up a Sound or Group as Send Effect (581)14.3.2Step 2: Route Audio to the Send Effect (583)14.3.3 A Few Notes on Send Effects (583)14.4Creating Multi-Effects (584)15Effect Reference (587)15.1Dynamics (588)15.1.1Compressor (588)15.1.2Gate (591)15.1.3Transient Master (594)15.1.4Limiter (596)15.1.5Maximizer (600)15.2Filtering Effects (603)15.2.1EQ (603)15.2.2Filter (605)15.2.3Cabinet (609)15.3Modulation Effects (611)15.3.1Chorus (611)15.3.2Flanger (612)15.3.3FM (613)15.3.4Freq Shifter (615)15.3.5Phaser (616)15.4Spatial and Reverb Effects (617)15.4.1Ice (617)15.4.2Metaverb (619)15.4.3Reflex (620)15.4.4Reverb (Legacy) (621)15.4.5Reverb (623)15.4.5.1Reverb Room (623)15.4.5.2Reverb Hall (626)15.4.5.3Plate Reverb (629)15.5Delays (630)15.5.1Beat Delay (630)15.5.2Grain Delay (632)15.5.3Grain Stretch (634)15.5.4Resochord (636)15.6Distortion Effects (638)15.6.1Distortion (638)15.6.2Lofi (640)15.6.3Saturator (641)15.7Perform FX (645)15.7.1Filter (646)15.7.2Flanger (648)15.7.3Burst Echo (650)15.7.4Reso Echo (653)15.7.5Ring (656)15.7.6Stutter (658)15.7.7Tremolo (661)15.7.8Scratcher (664)16Working with the Arranger (667)16.1Arranger Basics (667)16.1.1Navigating Song View (670)16.1.2Following the Playback Position in Your Project (672)16.1.3Performing with Scenes and Sections using the Pads (673)16.2Using Ideas View (677)16.2.1Scene Overview (677)16.2.2Creating Scenes (679)16.2.3Assigning and Removing Patterns (679)16.2.4Selecting Scenes (682)16.2.5Deleting Scenes (684)16.2.6Creating and Deleting Scene Banks (685)16.2.7Clearing Scenes (685)16.2.8Duplicating Scenes (685)16.2.9Reordering Scenes (687)16.2.10Making Scenes Unique (688)16.2.11Appending Scenes to Arrangement (689)16.2.12Naming Scenes (689)16.2.13Changing the Color of a Scene (690)16.3Using Song View (692)16.3.1Section Management Overview (692)16.3.2Creating Sections (694)16.3.3Assigning a Scene to a Section (695)16.3.4Selecting Sections and Section Banks (696)16.3.5Reorganizing Sections (700)16.3.6Adjusting the Length of a Section (702)16.3.6.1Adjusting the Length of a Section Using the Software (703)16.3.6.2Adjusting the Length of a Section Using the Controller (705)16.3.7Clearing a Pattern in Song View (705)16.3.8Duplicating Sections (705)16.3.8.1Making Sections Unique (707)16.3.9Removing Sections (707)16.3.10Renaming Scenes (708)16.3.11Clearing Sections (710)16.3.12Creating and Deleting Section Banks (710)16.3.13Working with Patterns in Song view (710)16.3.13.1Creating a Pattern in Song View (711)16.3.13.2Selecting a Pattern in Song View (711)16.3.13.3Clearing a Pattern in Song View (711)16.3.13.4Renaming a Pattern in Song View (711)16.3.13.5Coloring a Pattern in Song View (712)16.3.13.6Removing a Pattern in Song View (712)16.3.13.7Duplicating a Pattern in Song View (712)16.3.14Enabling Auto Length (713)16.3.15Looping (714)16.3.15.1Setting the Loop Range in the Software (714)16.3.15.2Activating or Deactivating a Loop Using the Controller (715)16.4Playing with Sections (715)16.4.1Jumping to another Playback Position in Your Project (716)16.5Triggering Sections or Scenes via MIDI (717)16.6The Arrange Grid (719)16.7Quick Grid (720)17Sampling and Sample Mapping (722)17.1Opening the Sample Editor (722)17.2Recording Audio (724)17.2.1Opening the Record Page (724)17.2.2Selecting the Source and the Recording Mode (725)17.2.3Arming, Starting, and Stopping the Recording (729)17.2.5Checking Your Recordings (731)17.2.6Location and Name of Your Recorded Samples (734)17.3Editing a Sample (735)17.3.1Using the Edit Page (735)17.3.2Audio Editing Functions (739)17.4Slicing a Sample (743)17.4.1Opening the Slice Page (743)17.4.2Adjusting the Slicing Settings (744)17.4.3Manually Adjusting Your Slices (746)17.4.4Applying the Slicing (750)17.5Mapping Samples to Zones (754)17.5.1Opening the Zone Page (754)17.5.2Zone Page Overview (755)17.5.3Selecting and Managing Zones in the Zone List (756)17.5.4Selecting and Editing Zones in the Map View (761)17.5.5Editing Zones in the Sample View (765)17.5.6Adjusting the Zone Settings (767)17.5.7Adding Samples to the Sample Map (770)18Appendix: Tips for Playing Live (772)18.1Preparations (772)18.1.1Focus on the Hardware (772)18.1.2Customize the Pads of the Hardware (772)18.1.3Check Your CPU Power Before Playing (772)18.1.4Name and Color Your Groups, Patterns, Sounds and Scenes (773)18.1.5Consider Using a Limiter on Your Master (773)18.1.6Hook Up Your Other Gear and Sync It with MIDI Clock (773)18.1.7Improvise (773)18.2Basic Techniques (773)18.2.1Use Mute and Solo (773)18.2.2Create Variations of Your Drum Patterns in the Step Sequencer (774)18.2.3Use Note Repeat (774)18.2.4Set Up Your Own Multi-effect Groups and Automate Them (774)18.3Special Tricks (774)18.3.1Changing Pattern Length for Variation (774)18.3.2Using Loops to Cycle Through Samples (775)18.3.3Load Long Audio Files and Play with the Start Point (775)19Troubleshooting (776)19.1Knowledge Base (776)19.2Technical Support (776)19.3Registration Support (777)19.4User Forum (777)20Glossary (778)Index (786)1Welcome to MASCHINEThank you for buying MASCHINE!MASCHINE is a groove production studio that implements the familiar working style of classi-cal groove boxes along with the advantages of a computer based system. MASCHINE is ideal for making music live, as well as in the studio. It’s the hands-on aspect of a dedicated instru-ment, the MASCHINE hardware controller, united with the advanced editing features of the MASCHINE software.Creating beats is often not very intuitive with a computer, but using the MASCHINE hardware controller to do it makes it easy and fun. You can tap in freely with the pads or use Note Re-peat to jam along. Alternatively, build your beats using the step sequencer just as in classic drum machines.Patterns can be intuitively combined and rearranged on the fly to form larger ideas. You can try out several different versions of a song without ever having to stop the music.Since you can integrate it into any sequencer that supports VST, AU, or AAX plug-ins, you can reap the benefits in almost any software setup, or use it as a stand-alone application. You can sample your own material, slice loops and rearrange them easily.However, MASCHINE is a lot more than an ordinary groovebox or sampler: it comes with an inspiring 7-gigabyte library, and a sophisticated, yet easy to use tag-based Browser to give you instant access to the sounds you are looking for.What’s more, MASCHINE provides lots of options for manipulating your sounds via internal ef-fects and other sound-shaping possibilities. You can also control external MIDI hardware and 3rd-party software with the MASCHINE hardware controller, while customizing the functions of the pads, knobs and buttons according to your needs utilizing the included Controller Editor application. We hope you enjoy this fantastic instrument as much as we do. Now let’s get go-ing!—The MASCHINE team at Native Instruments.MASCHINE Documentation1.1MASCHINE DocumentationNative Instruments provide many information sources regarding MASCHINE. The main docu-ments should be read in the following sequence:1.MASCHINE MIKRO Quick Start Guide: This animated online guide provides a practical ap-proach to help you learn the basic of MASCHINE MIKRO. The guide is available from theNative Instruments website: https:///maschine-mikro-quick-start/2.MASCHINE Manual (this document): The MASCHINE Manual provides you with a compre-hensive description of all MASCHINE software and hardware features.Additional documentation sources provide you with details on more specific topics:►Online Support Videos: You can find a number of support videos on The Official Native In-struments Support Channel under the following URL: https:///NIsupport-EN. We recommend that you follow along with these instructions while the respective ap-plication is running on your computer.Other Online Resources:If you are experiencing problems related to your Native Instruments product that the supplied documentation does not cover, there are several ways of getting help:▪Knowledge Base▪User Forum▪Technical Support▪Registration SupportYou will find more information on these subjects in the chapter Troubleshooting.Document Conventions1.2Document ConventionsThis section introduces you to the signage and text highlighting used in this manual. This man-ual uses particular formatting to point out special facts and to warn you of potential issues.The icons introducing these notes let you see what kind of information is to be expected:This document uses particular formatting to point out special facts and to warn you of poten-tial issues. The icons introducing the following notes let you see what kind of information canbe expected:Furthermore, the following formatting is used:▪Text appearing in (drop-down) menus (such as Open…, Save as… etc.) in the software andpaths to locations on your hard disk or other storage devices is printed in italics.▪Text appearing elsewhere (labels of buttons, controls, text next to checkboxes etc.) in thesoftware is printed in blue. Whenever you see this formatting applied, you will find thesame text appearing somewhere on the screen.▪Text appearing on the displays of the controller is printed in light grey. Whenever you seethis formatting applied, you will find the same text on a controller display.▪Text appearing on labels of the hardware controller is printed in orange. Whenever you seethis formatting applied, you will find the same text on the controller.▪Important names and concepts are printed in bold.▪References to keys on your computer’s keyboard you’ll find put in square brackets (e.g.,“Press [Shift] + [Enter]”).►Single instructions are introduced by this play button type arrow.→Results of actions are introduced by this smaller arrow.Naming ConventionThroughout the documentation we will refer to MASCHINE controller (or just controller) as the hardware controller and MASCHINE software as the software installed on your computer.The term “effect” will sometimes be abbreviated as “FX” when referring to elements in the MA-SCHINE software and hardware. These terms have the same meaning.Button Combinations and Shortcuts on Your ControllerMost instructions will use the “+” sign to indicate buttons (or buttons and pads) that must be pressed simultaneously, starting with the button indicated first. E.g., an instruction such as:“Press SHIFT + PLAY”means:1.Press and hold SHIFT.2.While holding SHIFT, press PLAY and release it.3.Release SHIFT.1.3New Features in MASCHINE2.8The following new features have been added to MASCHINE: Integration▪Browse on , create your own collections of loops and one-shots and send them directly to the MASCHINE browser.Improvements to the Browser▪Samples are now cataloged in separate Loops and One-shots tabs in the Browser.▪Previews of loops selected in the Browser will be played in sync with the current project.When a loop is selected with Prehear turned on, it will begin playing immediately in-sync with the project if transport is running. If a loop preview starts part-way through the loop, the loop will play once more for its full length to ensure you get to hear the entire loop once in context with your project.▪Filters and product selections will be remembered when switching between content types and Factory/User Libraries in the Browser.▪Browser content synchronization between multiple running instances. When running multi-ple instances of MASCHINE, either as Standalone and/or as a plug-in, updates to the Li-brary will be synced across the instances. For example, if you delete a sample from your User Library in one instance, the sample will no longer be present in the other instances.Similarly, if you save a preset in one instance, that preset will then be available in the oth-er instances, too.▪Edits made to samples in the Factory Libraries will be saved to the Standard User Directo-ry.For more information on these new features, refer to the following chapter ↑4, Browser. Improvements to the MASCHINE MIKRO MK3 Controller▪You can now set sample Start and End points using the controller. For more information refer to ↑17.3.1, Using the Edit Page.Improved Support for A-Series Keyboards▪When Browsing with A-Series keyboards, you can now jump quickly to the results list by holding SHIFT and pushing right on the 4D Encoder.▪When Browsing with A-Series keyboards, you can fast scroll through the Browser results list by holding SHIFT and twisting the 4D Encoder.▪Mute and Solo Sounds and Groups from A-Series keyboards. Sounds are muted in TRACK mode while Groups are muted in IDEAS.。
CS5368-CQZ;CS5368-CQZR;CS5368-DQZ;中文规格书,Datasheet资料

High-Pass Filter for DC Offset Calibration
Overflow Detection
Footprint Compatible with the 4-Channel CS5364 and 6-Channel CS5366
RECOMMENDED OPERATING CONDITIONS ................................................................................. 10 ABSOLUTE RATINGS ....................................................................................................................... 10 SYSTEM CLOCKING ......................................................................................................................... 10 DC POWER ........................................................................................................................................ 11 LOGIC LEVELS ................................................................................................................................. 11 PSRR, VQ AND FILT+ CHARACTERISTICS .................................................................................... 11 ANALOG CHARACTERISTICS (COMMERCIAL) .............................................................................. 12 ANALOG CHARACTERISTICS (AUTOMOTIVE) ............................................................................... 13 DIGITAL FILTER CHARACTERISTICS ............................................................................................. 14 OVERFLOW TIMEOUT ...................................................................................................................... 14 SERIAL AUDIO INTERFACE - I²S/LJ TIMING ................................................................................... 15 SERIAL AUDIO INTERFACE - TDM TIMING ..................................................................................... 16 SWITCHING SPECIFICATIONS - CONTROL PORT - I²C TIMING ................................................... 17 SWITCHING SPECIFICATIONS - CONTROL PORT - SPI TIMING .................................................. 18 4. APPLICATIONS ................................................................................................................................... 19 4.1 Power ............................................................................................................................................. 19 4.2 Control Port Mode and Stand-Alone Operation .............................................................................. 19
单片窄带调频接收电路——MC3361
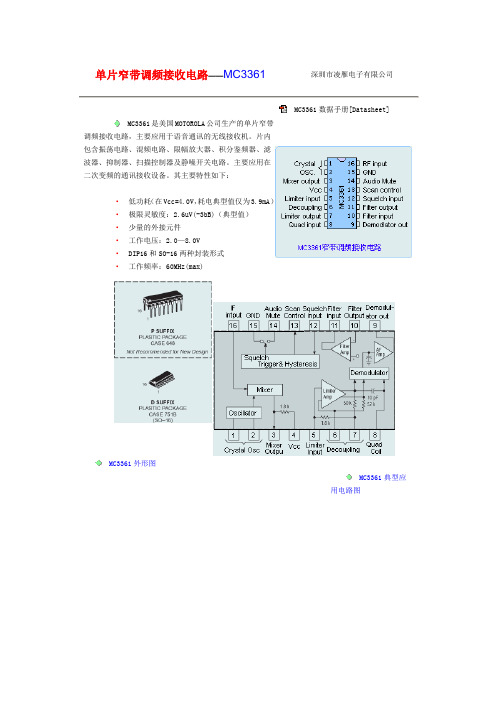
单片窄带调频接收电路——MC3361深圳市凌雁电子有限公司MC3361数据手册[Datasheet] MC3361是美国MOTOROLA公司生产的单片窄带调频接收电路,主要应用于语音通讯的无线接收机。
片内包含振荡电路、混频电路、限幅放大器、积分鉴频器、滤波器、抑制器、扫描控制器及静噪开关电路。
主要应用在二次变频的通讯接收设备。
其主要特性如下:·低功耗(在Vcc=4.0V,耗电典型值仅为3.9mA)·极限灵敏度:2.6uV(-3bB)(典型值)·少量的外接元件·工作电压:2.0—8.0V·DIP16和SO-16两种封装形式·工作频率:60MHz(max)MC3361外形图MC3361典型应用电路图MC3361单片窄带调频接收电路工作原理:MC3361的内部振荡电路与Pin1和Pin2的外接元件组成第二本振级,第一中频IF输入信号10.7MHz从MC3361的Pin16输入,在内部第二混频级进行混频,其差频为:10.700-10.245=0.455MHz,也即455kHz第二中频信号。
第二中频信号由Pin3输出,由455kHz陶瓷滤波器选频,再经Pin5送入MC3361的限幅放大器进行高增益放大,限幅放大级是整个电路的主要增益级。
Pin8的外接元件组成455kHz鉴频谐振回路,经放大后的第二中频信号在内部进行鉴频解调,并经一级音频电压放大后由Pin9输出音频信号。
Pin12——Pin15为载频检测和电子开关电路,通过外接少量的元件即可构成载频检测电路,用于调频接收机的静噪控制。
MC3361内部还置有一级滤波信号放大级,加上少量的外接元件可组成有源选频电路,为载频检测电路提供信号,该滤波器Pin10为输入端,Pin11为输出端。
Pin6和Pin7为第二中放级的退耦电容。
MC3361的极限参数MC3361的极限参数(Ta=25℃)名称引脚位置标识符极限值单位电源电压 4 Vcc(max) 10 V(DC)工作电压范围 4 Vcc 4—8 V(DC)检波输入电压8 - 1.0 Vp-p输入电压16 V16 1.0 V RMS静噪功能14 V14-0.5—5.0 Vpk焊接温度- T j150 ℃工作周围温度范围- T A-30—+70 ℃。
VK3366的IIC通信

VK3366的IIC通信1、vk3366的IIC通信时的模式选择。
我们芯片的IIC通信并不是标准的IIC通信模式,而是模拟的iic通信模式,请注意我们的通信时序。
通过MS0和MS1是模式选择位来选择VK3366主串口的接入模式,当MS1引脚接高电平,MS0引脚接低电平时,VK3366芯片主口是IIC模式。
2、SDA,SCL引脚1)SDA是串行数据总线,SCL是串行时钟总线。
当总线空闲时,SDA和SCL都通过上拉电阻接到电源正。
3、传输协议当主机与VK3366通信的时候,必须在紧跟地址字节后发送寄存器地址。
这个寄存器地址是主机想在一个字节读写或者多字节读写的操作的内部地址字。
这个寄存器地址字是8比特字节。
与其它设备不同它没有方向位,与普通的数据字节相同,它必须跟一个应答位。
一个写寄存器的操作如下图所示。
起始位后面紧跟从机地址和一个读写的方向位,一个寄存器地址字节,一系列的数据字节和一个停止位。
寄存器地址指示主机想操作的寄存器。
紧跟着的数据会被写入指定的寄存器。
一个寄存器的读操作与写操作类似。
主机发送从机地址和读的方向信号,紧跟寄存器地址,这时VK3366就会发送数据给主机。
[注意]:白的部分是主机到VK3366,灰色的部分是VK3366到主机[注意]:白的部分是主机到VK3366,灰色的部分是VK3366到主机从上面的通信格式我们可以看出,在一次通信的过程中包含如下几个部分:A 、起始位和停止位B 、应答位C 、器件地址D 、寄存器地址E 、数据段1)起始位和停止位起始位和停止位的格式START STOPSDASCL2)应答位3)器件地址[注意]: X = ‘0’ 表示写周期X = ‘1’ 表示读周期注意:器件地址是由A1A0编程实现的。
而且最低位是读写控制位。
例如当A1A0=11时,向器件写数据时的器件地址为0x96,从器件中读数据时的器件地址为0x97.4)寄存器地址5)一些关键函数//*************************************************************************//Function:主串口读写函数//输入:data1是写vk3366的器件地址,data2是vk3366的寄存器地址,data3是发送的数据//输出:i,读取数据//日期:2012/3/27//******************************************************************** unsigned char send(unsigned char _data1,unsigned char _data2,unsigned char _data3){unsigned char i;clk=1; // startdelay(1);sda=0;delay(1);clk=0;delay(1);i=0;if(_data1&0x80){sda=1;}else sda=0;delay(1);clk=1;delay(1);clk=0;delay(1);if(_data1&0x40){sda=1;}else sda=0;delay(1);clk=1;delay(1);clk=0;delay(1);if(_data1&0x20) {sda=1;}else sda=0;delay(1); clk=1;delay(1);clk=0;delay(1);if(_data1&0x10) {sda=1;}else sda=0;delay(1); clk=1;delay(1);clk=0;delay(1);if(_data1&0x08) {sda=1;}else sda=0;delay(1); clk=1;delay(1);clk=0;delay(1);if(_data1&0x04) {sda=1;}else sda=0;delay(1); clk=1;delay(1);clk=0;delay(1);if(_data1&0x02) {sda=1;}else sda=0;delay(1); clk=1;delay(1);clk=0;delay(1);if(_data1&0x01)sda=1; elsesda=0;delay(1); clk=1;delay(1); clk=0;delay(1);clk=1; //ackdelay(1); clk=0;delay(1);if(_data2&0x80) {sda=1;}else sda=0;delay(1); clk=1;delay(1); clk=0;delay(1);if(_data2&0x40) {sda=1;}else sda=0;delay(1); clk=1;delay(1); clk=0;delay(1);if(_data2&0x20) {sda=1;}else sda=0;delay(1); clk=1;delay(1); clk=0;delay(1);if(_data2&0x10) {sda=1;}else sda=0;delay(1); clk=1;delay(1); clk=0;delay(1);if(_data2&0x08) {sda=1;}else sda=0;delay(1); clk=1;delay(1); clk=0;delay(1);if(_data2&0x04) {sda=1;}else sda=0;delay(1); clk=1;delay(1); clk=0;delay(1);if(_data2&0x02) {sda=1;}else sda=0;delay(1); clk=1;delay(1); clk=0;delay(1);if(_data2&0x01)sda=1; else sda=0;delay(1); clk=1;delay(1); clk=0;delay(1);clk=1; //ackdelay(1);clk=0;delay(1);if(!(_data1&0x01)){if(_data3&0x80)sda=1;else sda=0;delay(1);clk=1;delay(1);clk=0;delay(1);if(_data3&0x40)sda=1;else sda=0;delay(1);clk=1;delay(1);clk=0;delay(1);if(_data3&0x20)sda=1;else sda=0;delay(1);clk=1;delay(1);clk=0;delay(1);if(_data3&0x10)sda=1;else sda=0;delay(1);clk=1;delay(1);clk=0;delay(1);if(_data3&0x08)sda=1; else sda=0; delay(1);clk=1;delay(1);clk=0;delay(1);if(_data3&0x04)sda=1; else sda=0; delay(1);clk=1;delay(1);clk=0;delay(1);if(_data3&0x02)sda=1; else sda=0; delay(1);clk=1;delay(1);clk=0;delay(1);if(_data3&0x01)sda=1; else sda=0; delay(1);clk=1;delay(1);clk=0;delay(1);clk=1; //ack delay(1);clk=0;delay(1);sda=0;//stop bitdelay(1);clk=1;delay(1);sda=1;}else{clk=1;delay(1);if(sda)i=i+128;clk=0;delay(1);clk=1;delay(1);if(sda)i=i+64;clk=0;delay(1);clk=1;delay(1);if(sda)i=i+32;clk=0;delay(1);clk=1;delay(1);if(sda)i=i+16;clk=0;delay(1);clk=1;delay(1);if(sda)i=i+8;clk=0;delay(1);clk=1;delay(1);if(sda)i=i+4;clk=0;delay(1);clk=1;delay(1);if(sda)i=i+2;clk=0;delay(1);clk=1;delay(1);if(sda)i=i+1;clk=0;delay(1);sda=0;delay(1);clk=1; //ackdelay(1);clk=0;delay(1);sda=0;//stop bitdelay(1);clk=1;delay(1);sda=1;}return i;}//*************************************************************************//*************************************************************************//Function:写寄存器函数//输入:port为子串口的路数,reg为寄存器的地址,dat为写入寄存器的数据//输出:无//日期:2012/3/27//********************************************************************void write_reg(unsigned char port,unsigned char reg,unsigned char dat){send(0x96,(((port-1)<<4)+reg),dat); //0x96为器件地址,由A1AO编程和写控制决定}//*************************************************************************//Function:读寄存器函数//输入:port为子串口的路数,reg为寄存器的地址//输出:返回值//日期:2012/3/27//************************************************************************* unsigned char read_reg(unsigned char port,unsigned char reg){return send(0x97,(((port-1)<<4)+reg),0x00);//0x97为器件地址,由A1AO编程和读控制决定}。
MC33661中文资料
3
WAKE
Wake Input
A high-voltage input used to wake up the device from sleep mode.
4
TXD
Transmitter Input MCU interface to control the state of the LIN output.
33661 4
MOTOROLA ANALOG INTEGRATED CIRCUIT DEVICE DATA
For More Information On This Product, Go to:
元器件交易网 Freescale Semiconductor, Inc.
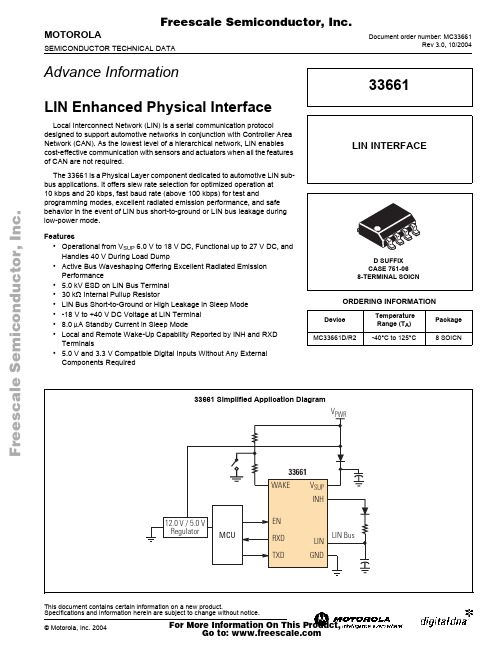
Advance Information
LIN Enhanced Physical Interface
Local Interconnect Network (LIN) is a serial communication protocol designed to support automotive networks in conjunction with Controller Area Network (CAN). As the lowest level of a hierarchical network, LIN enables cost-effective communication with sensors and actuators when all the features of CAN are not required.
8.0 to 20
°C
Notes 1. ESD1 testing is performed in accordance with the Human Body Model (CZAP = 100 pF, RZAP = 1500 Ω). 2. ESD2 testing is performed in accordance with the Machine Model (CZAP = 220 pF, RZAP = 0 Ω). 3. Terminal soldering temperature limit is for 10 seconds maximum duration. Not designed for immersion soldering. Exceeding these limits may cause malfunction or permanent damage to the device.
SPI总线协议英文版

Motorola reserves the right to make changes without further notice to any products herein.Motorola makes no warranty,representation or guarantee regarding the suitability of its products for any particular purpose,nor does Motorola assume any liability arising out of the application or use of any product or circuit,and specifically disclaims any and all liability, including without limitation consequential or incidental damages.“Typical”parameters which may be provided in Motorola data sheets and/or specifications can and do vary in different applications and actual performance may vary over time.All operating parameters,including“Typicals”must be validated for each customer application by customer’s technical experts.Motorola does not convey any license under its patent rights nor the rights of others.Motorola products are not designed,intended,or authorized for use as components in systems intended for surgical implant into the body,or other applications intended to support or sustain life,or for any other application in which the failure of the Motorola product could create a situation where personal injury or death may occur.Should Buyer purchase or use Motorola products for any such unintended or unauthorized application,Buyer shall indemnify and hold Motorola and its officers,employees,subsidiaries,affiliates,and distributors harmless against all claims,costs,damages,and expenses, and reasonable attorney fees arising out of,directly or indirectly,any claim of personal injury or death associated with such unintended or unauthorized use,even if such claim alleges that Motorola was negligent regarding the design or manufacture of the part.Motorola and are registered trademarks of Motorola,Inc.Motorola,Inc.is an EqualOpportunity/Affirmative Action Employer.SPI Block Guide V04.012Revision HistoryVersion Number Revision Date Effective DateAuthor Description of Changes0.121 Jan2000This spec is based on the Barracuda, with modifications to change the module from 16 bit to 8 bit.0.2 1 Mar 2000Template of this document changed as per Version 2.0 SRS.0.314 Jun 2000- Signal names are changed as per the SRS2.0- SPE bit remains set in the Mode Fault error case - Slave SPI does not support div2 and div4 cases0.431 Aug 2000- Electrical spec added- SPIF flag is cleared by a read access to the status register followed by read access to the data register.0.513 Mar 200113 Mar 2001- Incorporated feedback regarding format of the document.0.613 Mar 200119 Mar 2001- Incorporated changes as a result of internal discussions and clarification of SRS20.7 6 July 2001 6 July 2001- Line is added with respect to SPTEF bit to make spec more clear.- Landscape pages have been removed from pdf.- Extra blank pages have been removed.0.819 July 200119 July 2001- Line is added with respect to SPE bit to make spec more clear.V02.0226 July 2001-Added Document Names-variable definitions and Names have been hidden -Changed chapter 3.9 Errata to NoteV03.0027 Sep 200127 Sep 2001Based on the BUG version V02.02 an improved version was created. The specification counter has to be increased, because there is a difference in the behavior in SPI master mode from this specification to its predecessor.In SPI Master Mode,the change of a config bit during a transmission in progress, will abort the transmission and force the SPI into idle state.V03.0114 Dec 200114 Dec 2001Section 4.4.2- Changed description of transfer format CPHA=0 in slave mode Section 4.4.3- Changed description of transfer format CPHA=1 in master mode - Changed Figure 4-3Section 4.6.2- Added note for mode fault in bidirectional master mode Section 4.7.1- Changed description of bidirectional mode with mode fault Section 4.8.3- Changed last sentence in stop mode descriptionV03.0207 Jan 200207 Jan 2002Section 3.3.4- Changed description of SPTEF flag Section 4.1- Changed description of SPTEF flag and SPIDR behaviourF r e e s c a l e S e m i c o n d u c t o r , IFreescale Semiconductor, Inc.n c .SPI Block Guide V04.013V03.0309 Jan200209 JAN 2002Transferred document to SRS3.0 format V03.0418 Mar 200218 Mar 2002Updated Document Format.V03.0503 Apr 200203 Apr 2002Minor Document cleanup.V03.0604 Feb 200304 Feb 2003Minor Document cleanup.V04.0002 Jun 200402 Jun 2004Section 3.1.3, Section 4.5- modified/added note about max. allowed baud rates Enhanced receive buffer functionality:Section 3.1.5, Section 4, Section 4.8.5.2 - modified functionality of data reception Section 4.3- updated note regarding change of config bits for modified functionality of data reception Section 4.8.1- modified note regarding spi slave in wait/stop mode V04.0114 Jul 200414 Jul 2004Section 3.1.5- minor rewording.Version Number Revision Date Effective DateAuthor Description of ChangesF r e e s c a l e S e m i c o n d u c t o r , IFreescale Semiconductor, Inc.n c .SPI Block Guide V04.014F r e e s c a l e S e m i c o n d u c t o r , IFreescale Semiconductor, Inc.n c .SPI Block Guide V04.015Table of ContentsSection 1 Introduction1.1Overview. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .131.2Features. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .141.3Modes of Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14Section 2 External Signal Description2.1Overview. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .152.2Detailed Signal Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .152.2.1MOSI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .152.2.2MISO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .152.2.3SS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .152.2.4SCK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15Section 3 Memory Map/Register Definition3.1Register Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .163.1.1SPI Control Register 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .163.1.2SPI Control Register 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .183.1.3SPI Baud Rate Register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .193.1.4SPI Status Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .213.1.5SPI Data Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22Section 4 Functional Description4.1General. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .244.2Master Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .244.3Slave Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .254.4Transmission Formats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .264.4.1Clock Phase and Polarity Controls. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .274.4.2CPHA = 0 Transfer Format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .274.4.3CPHA = 1 Transfer Format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .294.5SPI Baud Rate Generation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .304.6Special Features. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .314.6.1SS Output. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .314.6.2Bidirectional Mode (MOMI or SISO). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31F r e e s c a l e S e m i c o n d u c t o r , IFreescale Semiconductor, Inc.n c .SPI Block Guide V04.0164.7Error Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .324.7.1Mode Fault Error . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .324.8Low Power Mode Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .334.8.1SPI in Run Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .334.8.2SPI in Wait Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .334.8.3SPI in Stop Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .344.8.4Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .344.8.5Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34Section 5 Initialization/Application InformationF r e e s c a l e S e m i c o n d u c t o r , IFreescale Semiconductor, Inc.n c .SPI Block Guide V04.017List of FiguresFigure 1-1SPI Block Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13Figure 3-1SPI Control Register 1 (SPICR1). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16Figure 3-2SPI Control Register 2 (SPICR2). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18Figure 3-3SPI Baud Rate Register (SPIBR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19Figure 3-4SPI Status Register (SPISR). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21Figure 3-5SPI Data Register (SPIDR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22Figure 3-6Reception with SPIF serviced in time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23Figure 3-7Reception with SPIF serviced too late. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23Figure 4-1Master/Slave Transfer Block Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27Figure 4-2SPI Clock Format 0 (CPHA = 0) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28Figure 4-3SPI Clock Format 1 (CPHA = 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30Figure 4-4Baud Rate Divisor Equation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31F r e e s c a l e S e m i c o n d u c t o r , IFreescale Semiconductor, Inc.n c .SPI Block Guide V04.018F r e e s c a l e S e m i c o n d u c t o r , IFreescale Semiconductor, Inc.n c .SPI Block Guide V04.019List of TablesTable 3-1Module Memory Map. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15Table 3-2SS Input / Output Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17Table 3-3Bidirectional Pin Configurations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19Table 3-4Example SPI Baud Rate Selection (25 MHz Bus Clock). . . . . . . . . . . . . . . . .20Table 4-1Normal Mode and Bidirectional Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32F r e e s c a l e S e m i c o n d u c t o r , IFreescale Semiconductor, Inc.n c .SPI Block Guide V04.0110F r e e s c a l e S e m i c o n d u c t o r , IFreescale Semiconductor, Inc.n c .PrefaceTerminologyAcronyms and AbbreviationsSPI Serial Parallel Interface SS Slave Select SCK Serial ClockMOSI Master Output, Slave Input MISO Master Input, Slave Output MOMI Master Output, Master Input SISOSlave Input, Slave OutputF r e e s c a l e S e m i c o n d u c t o r , In c .F r e e s c a l e S e m i c o n d u c t o r , In c .Section 1 IntroductionFigure 1-1 gives an overview on the SPI architecture. The main parts of the SPI are status,control and data registers, shifter logic, baud rate generator, master/slave control logic and port control logic.Figure 1-1 SPI Block Diagram1.1 OverviewThe SPI module allows a duplex, synchronous, serial communication between the MCU and peripheral devices. Software can poll the SPI status flags or the SPI operation can be interrupt driven.Port 8Phase +Master Slave Shift Sample SPI SPI Control Register 1SPI Control Register 2SPI Baud Rate RegisterSPI Status RegisterSPI Data RegisterShifterControl LogicMOSISCKInterrupt ControlSPIMSBLSBLSBFE=1LSBFE=0LSBFE=0LSBFE=1data inLSBFE=1LSBFE=0data out8Baud Rate GeneratorPrescaler Bus ClockCounterClock SelectSPPR 33SPR Baud RatePolarity ControlSCK in SCK out Master Baud RateSlave Baud Rate Phase +Polarity ControlControlControlCPOL CPHA2BIDIROESPC02ClockClockMODF SPIF SPTEFRequestInterrupt SSMISOF r e e s c a l e S e m i c o n d u c t o r , In c .1.2 FeaturesThe SPI includes these distinctive features:•Master mode and slave mode •Bi-directional mode •Slave select output•Mode fault error flag with CPU interrupt capability •Double-buffered data register•Serial clock with programmable polarity and phase •Control of SPI operation during wait mode1.3 Modes of OperationThe SPI functions in three modes, run, wait, and stop.•Run ModeThis is the basic mode of operation.•Wait ModeSPI operation in wait mode is a configurable low power mode, controlled by the SPISWAI bit located in the SPICR2 register. In wait mode, if the SPISWAI bit is clear, the SPI operates like in Run Mode. If the SPISWAI bit is set, the SPI goes into a power conservative state, with the SPI clock generation turned off.If the SPI is configured as a master,any transmission in progress stops,but is resumed after CPU goes into Run Mode. If the SPI is configured as a slave, reception and transmission of a byte continues, so that the slave stays synchronized to the master.•Stop ModeThe SPI is inactive in stop mode for reduced power consumption. If the SPI is configured as a master, any transmission in progress stops, but is resumed after CPU goes into Run Mode. If the SPI is configured as a slave,reception and transmission of a byte continues,so that the slave stays synchronized to the master.This is a high level description only,detailed descriptions of operating modes are contained in section 4.8Low Power Mode Options .Section 2 External Signal DescriptionF r e e s c a l e S e m i c o n d u c t o r , In c .2.1 OverviewThis section lists the name and description of all ports including inputs and outputs that do,or may,connect off chip. The SPI module has a total of 4 external pins.2.2 Detailed Signal Description2.2.1 MOSIThis pin is used to transmit data out of the SPI module when it is configured as a Master and receive data when it is configured as Slave.2.2.2 MISOThis pin is used to transmit data out of the SPI module when it is configured as a Slave and receive data when it is configured as Master.2.2.3SSThis pin is used to output the select signal from the SPI module to another peripheral with which a data transfer is to take place when its configured as a Masterand its used as an input to receive the slave select signal when the SPI is configured as Slave.2.2.4 SCKThis pin is used to output the clock with respect to which the SPI transfers data or receive clock in case of Slave.Section 3 Memory Map/Register DefinitionThis section provides a detailed description of address space and registers used by the SPI.The memory map for the SPI is given below in Table 3-1.The address listed for each register is the sum of a base address and an address offset.The base address is defined at the SoC level and the address offset is defined at the module level. Reads from the reserved bits return zeros and writes to the reserved bits have no effect.Table 3-1 Module Memory MapAddressUseAccess$___0SPI Control Register 1 (SPICR1)Read / Write $___1SPI Control Register 2 (SPICR2)Read / Write 1$___2SPI Baud Rate Register (SPIBR)Read / Write 1F r e e s c a l e S e m i c o n d u c t o r , In c .3.1 Register DescriptionsThis section consists of register descriptions in address order.Each description includes a standard register diagram with an associated figure number. Details of register bit and field function follow the register diagrams, in bit order.3.1.1 SPI Control Register 1Figure 3-1 SPI Control Register 1 (SPICR1)Read:anytime Write:anytimeSPIE — SPI Interrupt Enable BitThis bit enables SPI interrupt requests, if SPIF or MODF status flag is set.1 = SPI interrupts enabled.0 = SPI interrupts disabled.SPE — SPI System Enable BitThis bit enables the SPI system and dedicates the SPI port pins to SPI system functions. If SPE is cleared, SPI is disabled and forced into idle state, status bits in SPISR register are reseted 1 = SPI enabled, port pins are dedicated to SPI functions.0 = SPI disabled (lower power consumption).SPTIE — SPI Transmit Interrupt EnableThis bit enables SPI interrupt requests, if SPTEF flag is set.1 = SPTEF interrupt enabled.$___3SPI Status Register (SPISR)Read 2$___4Reserved—23$___5SPI Data Register (SPIDR)Read / Write$___6Reserved —23$___7Reserved—23NOTES :1. Certain bits are non-writable.2. Writes to this register are ignored.3. Reading from this register returns all zeros.Register Address: $___0Bit 7654321Bit 0R SPIE SPE SPTIE MSTR CPOL CPHA SSOE LSBFEW Reset:1Table 3-1 Module Memory MapF r e e s c a l e S e m i c o n d u c t o r , In c .0 = SPTEF interrupt disabled.MSTR — SPI Master/Slave Mode Select BitThis bit selects,if the SPI operates in master or slave mode.Switching the SPI from master to slave or vice versa forces the SPI system into idle state.1 = SPI is in Master mode 0 = SPI is in Slave mode CPOL — SPI Clock Polarity BitThis bit selects an inverted or non-inverted SPI clock.To transmit data between SPI modules,the SPI modules must have identical CPOL values. In master mode, a change of this bit will abort a transmission in progress and force the SPI system into idle state.1 = Active-low clocks selected. In idle state SCK is high.0 = Active-high clocks selected. In idle state SCK is low.CPHA — SPI Clock Phase BitThis bit is used to select the SPI clock format. In master mode, a change of this bit will abort a transmission in progress and force the SPI system into idle state.1 = Sampling of data occurs at even edges (2,4,6,...,16) of the SCK clock 0 = Sampling of data occurs at odd edges (1,3,5,...,15) of the SCK clock SSOE — Slave Select Output EnableThe SS output feature is enabled only in master mode, if MODFEN is set, by asserting the SSOE as shown in Table 3-2. In master mode, a change of this bit will abort a transmission in progress and force the SPI system into idle state.LSBFE — LSB-First EnableThis bit does not affect the position of the MSB and LSB in the data register.Reads and writes of the data register always have the MSB in bit 7. In master mode, a change of this bit will abort a transmission in progress and force the SPI system into idle state.1 = Data is transferred least significant bit first.0 = Data is transferred most significant bit first.Table 3-2SS Input / Output SelectionMOD FENSSOE Master ModeSlave Mode00SS not used by SPI SS input 01SS not used by SPI SS input 10SS input with MODF feature SS input 11SS is slave select outputSS inputF r e e s c a l e S e m i c o n d u c t o r , In c .3.1.2 SPI Control Register 2Figure 3-2 SPI Control Register 2 (SPICR2)Read:anytimeWrite:anytime; writes to the reserved bits have no effectMODFEN — Mode Fault Enable BitThis bit allows the MODF failure being detected. If the SPI is in Master mode and MODFEN is cleared,then the SS port pin is not used by the SPI.In Slave mode,the SS is available only as an input regardless of the value of MODFEN. For an overview on the impact of the MODFEN bit on the SS port pin configuration refer to Table 3-2.In master mode,a change of this bit will abort a transmission in progress and force the SPI system into idle state.1 =SS port pin with MODF feature 0 =SS port pin is not used by the SPI BIDIROE — Output enable in the Bidirectional mode of operationThis bit controls the MOSI and MISO output buffer of the SPI,when in bidirectional mode of operation (SPC0 is set). In master mode this bit controls the output buffer of the MOSI port, in slave mode it controls the output buffer of the MISO port. In master mode, with SPC0 set, a change of this bit will abort a transmission in progress and force the SPI into idle state.1 = Output buffer enabled 0 = Output buffer disabled SPISWAI — SPI Stop in Wait Mode BitThis bit is used for power conservation while in wait mode.1 = Stop SPI clock generation when in wait mode 0 = SPI clock operates normally in wait modeSPC0 — Serial Pin Control Bit 0This bit enables bidirectional pin configurations as shown in Table 3-3.In master mode,a change of this bit will abort a transmission in progress and force the SPI system into idle stateRegister Address: $___1Bit 7654321Bit 0R 000MODFENBIDIROE0SPISWAISPC0W Reset:00= ReservedF r e e s c a l e S e m i c o n d u c t o r , In c .3.1.3 SPI Baud Rate RegisterFigure 3-3 SPI Baud Rate Register (SPIBR)Read:anytimeWrite:anytime; writes to the reserved bits have no effect SPPR2–SPPR0 — SPI Baud Rate Preselection Bits SPR2–SPR0 — SPI Baud Rate Selection BitsThese bits specify the SPI baud rates as shown in the table below.In master mode,a change of these bits will abort a transmission in progress and force the SPI system into idle state.The baud rate divisor equation is as follows:The baud rate can be calculated with the following equation:NOTE:For max. allowed baud rates, please refer to the SPI Electrical Specification in the according SoC-Guide.Table 3-3 Bidirectional Pin ConfigurationsPin Mode SPC0BIDIROE MISO MOSI Master Mode of Operation Normal 0X Master In Master Out Bidirectional10MISO not used by SPI Master In1Master I/O Slave Mode of Operation Normal 0X Slave Out SlaveIn Bidirectional10Slave InMOSI not used by SPI1Slave I/ORegister Address: $___2Bit 7654321Bit 0R0SPPR2SPPR1SPPR00SPR2SPR1SPR0W Reset:00= ReservedBaudRateDivisor SPPR 1+()2•SPR 1+()=Baud Rate BusClock BaudRateDivisor⁄=F r e e s c a l e S e m i c o n d u c t o r , In c .Table 3-4 Example SPI Baud Rate Selection (25 MHz Bus Clock)SPPR2SPPR1SPPR0SPR2SPR1SPR0BaudRate DivisorBaud Rate000000212.5 MHz 0000014 6.25 MHz 0000108 3.125 MHz 00001116 1.5625 MHz 00010032781.25 kHz 00010164390.63 kHz 000110128195.31 kHz 00011125697.66 kHz 0010004 6.25 MHz 0010018 3.125 MHz 00101016 1.5625 MHz 00101132781.25 kHz 00110064390.63 kHz 001101128195.31 kHz 00111025697.66 kHz 00111151248.83 kHz 0100006 4.16667 MHz 01000112 2.08333 MHz 01001024 1.04167 MHz 010********.83 kHz 010********.42 kHz010*********.21 kHz 010********.10 kHz 010********.55 kHz 0110008 3.125 MHz 01100116 1.5625 MHz 01101032781.25 kHz 01101164390.63 kHz 011100128195.31 kHz 01110125697.66 kHz 01111051248.83 kHz 011111102424.41 kHz 10000010 2.5 MHz 10000120 1.25 MHz 10001040625 kHz 10001180312.5 kHz 100100160156.25 kHz 10010132078.13 kHz 10011064039.06 kHz 100111128019.53 kHz 10100012 2.08333 MHz 10100124 1.04167 MHz 11148520.83 kHzF r e e s c a l e S e m i c o n d u c t o r , In c .3.1.4 SPI Status RegisterFigure 3-4 SPI Status Register (SPISR)Read:anytime Write:has no effect SPIF — SPIF Interrupt Flag10101196260.42 kHz 101100192130.21 kHz 10110138465.10 kHz 10111076832.55 kHz 101111153616.28 kHz 11000014 1.78571 MHz 11000128892.86 kHz 11001056446.43 kHz 110011112223.21 kHz 110100224111.61 kHz 11010144855.80 kHz 11011089627.90 kHz 110111179213.95 kHz 11100016 1.5625 MHz 11100132781.25 kHz 11101064390.63 kHz 111011128195.31 kHz 11110025697.66 kHz 11110151248.83 kHz 111110102424.41 kHz111111204812.21 kHzRegister Address: $___3Bit 7654321Bit 0R SPIF 0SPTEF MODF 0000W Reset:10= ReservedTable 3-4 Example SPI Baud Rate Selection (25 MHz Bus Clock)SPPR2SPPR1SPPR0SPR2SPR1SPR0BaudRate DivisorBaud RateF r e e s c a l e S e m i c o n d u c t o r , In c .This bit is set after a received data byte has been transferred into the SPI Data Register. This bit is cleared by reading the SPISR register (with SPIF set) followed by a read access to the SPI Data Register.1 = New data copied to SPIDR 0 = Transfer not yet complete SPTEF — SPI Transmit Empty Interrupt FlagIf set,this bit indicates that the transmit data register is empty.To clear this bit and place data into the transmit data register,SPISR has to be read with SPTEF=1,followed by a write to SPIDR.Any write to the SPI Data Register without reading SPTEF=1, is effectively ignored.1 = SPI Data register empty 0 = SPI Data register not emptyMODF — Mode Fault FlagThis bit is set if the SS input becomes low while the SPI is configured as a master and mode fault detection is enabled, MODFEN bit of SPICR2 register is set. Refer to MODFEN bit description in 3.1.2 SPI Control Register 2. The flag is cleared automatically by a read of the SPI Status Register (with MODF set) followed by a write to the SPI Control Register 1.1 = Mode fault has occurred.0 = Mode fault has not occurred.3.1.5 SPI Data RegisterFigure 3-5 SPI Data Register (SPIDR)Read:anytime; normally read only when SPIF is setWrite:anytimeThe SPI Data Register is both the input and output register for SPI data.A write to this register allows a data byte to be queued and transmitted. For a SPI configured as a master, a queued data byte is transmitted immediately after the previous transmission has completed. The SPI Transmitter Empty Flag SPTEF in the SPISR register indicates when the SPI Data Register is ready to accept new data.Received data in the SPIDR is valid when SPIF is set.If SPIF is cleared and a byte has been received,the received byte is transferred from the receive shift register to the SPIDR and SPIF is set.If SPIF is set and not serviced, and a second byte has been received, the second received byte is kept as valid byte in the receive shift register until the start of another transmission.The byte in the SPIDR does not change.Register Address: $___5Bit 7654321Bit 0R Bit 7654322Bit 0W Reset:F r e e s c a l e S e m i c o n d u c t o r , In c .If SPIF is set and a valid byte is in the receive shift register,and SPIF is serviced before the start of a third transmission,the byte in the receive shift register is transferred into the SPIDR and SPIF remains set (see Figure 3-6 Reception with SPIF serviced in time ).If SPIF is set and a valid byte is in the receive shift register, and SPIF is serviced after the start of a third transmission,the byte in the receive shift register has become invalid and is not transferred into the SPIDR (see Figure 3-7 Reception with SPIF serviced too late )Figure 3-6 Reception with SPIF serviced in timeFigure 3-7 Reception with SPIF serviced too lateReceive Shift RegisterSPIFSPI Data RegisterData AData BData AData A received Data B received Data CData CSPIF servicedData C receivedData B= unspecified = reception in progressReceive Shift RegisterSPIFSPI Data RegisterData A Data B Data AData A received Data B receivedData CData CSPIF servicedData C receivedData B lost = unspecified = reception in progressF r e e s c a l e S e m i c o n d u c t o r , In c .。
Freescale 高温和媒体抗性集成压力传感器 MPXHZ6250A系列说明书

© Freescale Semiconductor, Inc., 2005. All rights reserved.On-Chip Signal Conditioned,Temperature Compensatedand CalibratedThe Freescale MPXHZ6250A series sensor integrates on-chip, bipolar opamp circuitry and thin film resistor networks to provide a high output signal andtemperature compensation. The small form factor and high reliability of on-chipintegration make the Freescale sensor a logical and economical choice forautomotive system designers.The MPXHZ6250A series piezoresistive transducer is a state-of-the-art,monolithic, signal conditioned, silicon pressure sensor. This sensor combinesadvanced micromachining techniques, thin film metallization, and bipolarsemiconductor processing to provide an accurate, high level analog output signalthat is proportional to applied pressure.Figure 1 shows a block diagram of the internal circuitry integrated on apressure sensor chip.Features•Improved Accuracy at High Temperature •Available in Small and Super Small Outline Packages •1.5% Maximum Error over 0° to 85°C •Ideally suited for Microprocessor or Microcontroller-Based Systems •Temperature Compensated from –40° to +125°C •Durable Thermoplastic (PPS) Surface Mount Package Typical Applications•Industrial Controls •Engine Control/Liquified Petroleum Gas (LPG)ORDERING INFORMATIONDeviceTypeOptions Case No.MPX Series Order No.Packing Options Device Marking PortedElement Absolute, Axial Port1317A MPXHZ6250AC6T1Tape & Reel MPXHZ6250A INTEGRATED PRESSURE SENSOR 20 to 250 kPa (3.0 to 36 psi)0.3 to 4.9 V OUTPUT PIN NUMBERS (1)1.Pins 1, 5, 6, 7, and 8 are internal device connections. Do not connect to external circuitry or ground. Pin 1 is noted by the notch in the lead.1N/C 5N/C 2V S 6N/C 3GND 7N/C 4V OUT 8N/CMPXHZ6250ASensorsFigure 1. Fully Integrated Pressure Sensor SchematicTable 1. Maximum Ratings (1)1. Exposure beyond the specified limits may cause permanent damage or degradation to the device. RatingSymbol Value Unit Maximum PressureP MAX 1000kPa Storage Temperature T STG –40 to +125°C Operating TemperatureT A –40 to +125°C Output Source Current @ Full Scale Output (2)2. Maximum Output Current is controlled by effective impedance from V out to GND or V out to V S in the application circuit.I o +0.5mAdc Output Sink Current @ Minimum Pressure Offset 2I o –-0.5mAdcGND Pins 1, 5, 6, 7, and 8 are NO CONNECTSfor small outline package devices.MPXHZ6250ASensors202501.Device is ratiometric within this specified excitation range.4.755.0 5.256.010@ V S = 5.0 Volts (2)2.Offset (V off ) is defined as the output voltage at the minimum rated pressure.off 0.1310.20.269Full Scale Output(0 to 85°C)@ V S = 5.0 Volts (3)3.Full Scale Output (V FSO ) is defined as the output voltage at the maximum or full rated pressure.V FSO 4.731 4.8 4.869Vdc Full Scale Span(0 to 85°C)@ V S = 5.0 Volts (4)4.Full Scale Span (V FSS ) is defined as the algebraic difference between the output voltage at full rated pressure and the output voltage at the minimum rated pressure.V FSS 4.462 4.6 4.738Vdc Accuracy (5)(0 to 85°C)5.Accuracy is the deviation in actual output from nominal output over the entire pressure range and temperature range as a percent of span at 25°C due to all sources of error including the following:•Linearity:Output deviation from a straight line relationship with pressure over the specified pressure range.•Temperature Hysteresis:Output deviation at any temperature within the operating temperature range, after the temperature is cycled toand from the minimum or maximum operating temperature points, with zero differential pressure applied.•Pressure Hysteresis:Output deviation at any pressure within the specified range, when this pressure is cycled to and from theminimum or maximum rated pressure, at 25°C.•TcSpan:Output deviation over the temperature range of 0 to 85°C, relative to 25°C.•TcOffset:Output deviation with minimum rated pressure applied, over the temperature range of 0 to 85°C, relative to 25°C.•Variation from Nominal:The variation from nominal values, for Offset or Full Scale Span, as a percent of V FSS , at 25°C.———±1.5%V FSS SensitivityV/P —20—mV/kPa Response Time (6)6.Response Time is defined as the time for the incremental change in the output to go from 10% to 90% of its final value when subjected to a specified step change in pressure.t R — 1.0—ms Warm-Up Time (7)7.Warm-up Time is defined as the time required for the product to meet the specified output voltage after the Pressure has been stabilized.——20—ms Offset Stability (8)8.Offset Stability is the product's output deviation when subjected to 1000 hours of Pulsed Pressure, Temperature Cycling with Bias Test.——±0.25—%V FSSMPXHZ6250ASensors 23Figure 2. Typical Application Circuit(Output Source Current Operation)Figure 3. Output versus Absolute Pressure V S Pin 2GND Pin 3V OUT Pin 4MPXHZ6250A To ADC100 nF 51 K 47 pF O u t p u t (V o l t s )Pressure (Reference to Sealed Vacuum) in kPa 203143546677891001121231351461581691811922042152272384.504.05.01.01.52.02.53.03.50.5250Transfer Function:V out = V s *(0.0040*P-0.040) ± Error V S = 5.0 Vdc Temperature = 0 to 85°CMIN MAX TYPMPXHZ6250ASensorsSURFACE MOUNTING INFORMATIONMinimum Recommended Footprint for Super Small Outline PackagesSurface mount board layout is a critical portion of the totaldesign. The footprint for the semiconductor package must bethe correct size to ensure proper solder connection interfacebetween the board and the package. With the correct padgeometry, the packages will self-align when subjected to asolder reflow process. It is always recommended to fabricateboards with a solder mask layer to avoid bridging and/orshorting between solder pads, especially on tight tolerancesand/or tight layouts.Figure 4. SSOP Footprint (Case 1317A)Temp Multiplier -4030 to 851125 1.75Temperature in °C4.03.02.00.01.0-40-20020406014012010080TemperatureErrorFactor NOTE: The Temperature Multiplier is a linear response from 0°C to -40°C and from 85°C to 125°C.Pressure Error (Max)Pressure Error Band20 to 250 (kPa)±3.45 (kPa)MPXHZ6250APressure (in kPa)Error Limits for Pressure Break Points 3.02.01.0-1.0-2.0-4.00.04.0-3.020P r e s s u r e E r r o r (k Pa )601001401802202603000.027 TYP 8X0.690.053 TYP 8X1.35inch mm0.3879.830.1503.810.0501.27TYPMPXHZ6250ASensorsISSUE CSUPER SMALL OUTLINE PACKAGEMPXHZ6250ASensorsISSUE CSUPER SMALL OUTLINE PACKAGEHow to Reach Us:Home Page:E-mail:*********************USA/Europe or Locations Not Listed: Freescale SemiconductorTechnical Information Center, CH370 1300 N. Alma School Road Chandler, Arizona 85224+1-800-521-6274 or +1-480-768-2130 *********************Europe, Middle East, and Africa:Freescale Halbleiter Deutschland GmbHTechnical Information CenterSchatzbogen 781829 Muenchen, Germany+44 1296 380 456 (English)+46 8 52200080 (English)+49 89 92103 559 (German)+33 1 69 35 48 48 (French)*********************Japan:Freescale Semiconductor Japan Ltd.HeadquartersARCO Tower 15F1-8-1, Shimo-Meguro, Meguro-ku,Tokyo 153-0064Japan0120 191014 or +81 3 5437 9125***************************Asia/Pacific:Freescale Semiconductor Hong Kong Ltd.Technical Information Center2 Dai King StreetTai Po Industrial EstateTai Po, N.T., Hong Kong+800 2666 8080**************************For Literature Requests Only:Freescale Semiconductor Literature Distribution Center P.O. Box 5405Denver, Colorado 802171-800-441-2447 or 303-675-2140Fax: 303-675-2150*********************************************MPXHZ6250ARev. 0Information in this document is provided solely to enable system and software implementers to use Freescale Semiconductor products. There are no express or implied copyright licenses granted hereunder to design or fabricate any integrated circuits or integrated circuits based on the information in this document.Freescale Semiconductor reserves the right to make changes without further notice to any products herein. Freescale Semiconductor makes no warranty, representation or guarantee regarding the suitability of its products for any particular purpose, nor does Freescale Semiconductor assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation consequential or incidental damages. “Typical” parameters that may be provided in Freescale Semiconductor data sheets and/or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals”, must be validated for each customer application by customer’s technical experts. Freescale Semiconductor does not convey any license under its patent rights nor the rights of others. Freescale Semiconductor products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or other applications intended to support or sustain life, or for any other application in which the failure of the Freescale Semiconductor product could create a situation where personal injury or death may occur. Should Buyer purchase or use Freescale Semiconductor products for any such unintended or unauthorized application, Buyer shall indemnify and hold Freescale Semiconductor and its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claim alleges that Freescale Semiconductor was negligent regarding the design or manufacture of the part. Freescale™ and the Freescale logo are trademarks of Freescale Semiconductor, Inc. All other product or service names are the property of their respective owners.© Freescale Semiconductor, Inc. 2005. All rights reserved.。
Micrel KSZ8081RNA KSZ8081RND 10Base-T 100Base-TX 物

KSZ8081RNA / KSZ8081RND10Base-T/100Base-TXPhysical Layer TransceiverEvaluation Board User’s GuideRevision 1.0 / August 2012© Micrel, Inc. 2012All rights reservedMicrel is a registered trademark of Micrel and its subsidiaries in theUnited States and certain other countries. All other trademarks are theproperty of their respective owners.The information furnished by Micrel in this datasheet is believed to be accurate and reliable. However, no responsibility is assumed by Micrel for its use. Micrel reserves the right to change circuitry and specifications at any time without notification to the customer. Micrel Products are not designed or authorized for use as components in life support appliances, devices or systems where malfunction of a product can reasonably be expected to result in personal injury. Life support devices or systems are devices or systems that (a) are intended for surgical implant into the body or (b) support or sustain life, and whose failure to perform can be reasonably expected to result in a significant injury to the user.A Purchaser's use or sale of Micrel Products for use in life support appliances, devices or systems is at Purchaser's own risk and Purchaser agrees to fully indemnify Micrel for any damages resulting from such use or sale.Revision HistoryRevision Date Summary of ChangesRelease1.0 8/17/12InitialMicrel, Inc. August 17, 2012Table of Contents1.0 Introduction (5)2.0 Board Features (5)3.0 Evaluation Kit Contents (5)4.0 Hardware Description (6)4.1 RMII (Reduced Media Independent Interface) (7)4.2 MDC/MDIO Management Interface (9)4.2.1 USB Interface (9)4.3 Power (9)4.4 RMII Loopback Jumpers (10)4.5 Test Point Definition (11)4.6 RJ-45 Connector (11)4.7 LED Indicators (11)Micrel, Inc. August 17, 2012List of FiguresFigure 1. KSZ8081RNA / KSZ8081RND Evaluation Board (6)Figure 2. KSZ8081RNA-EVAL interfacing with KSZ8463RLI Evaluation Board (7)List of TablesTable 1. Board Configuration for RMII Clocking Modes (8)Table 2. Connector J4 - RMII Pin Definition (8)Table 3. MIIM Source Selection (9)Table 4. 5V Power Source Selection (10)Table 5. VDDIO Voltage Selection (10)Table 6. KSZ8081RNA-EVAL / KSZ8081RND-EVAL Loopback Jumper Definition (10)Table 7. KSZ8081RNA-EVAL / KSZ8081RND-EVAL Test Point Definition (11)Table 8. KSZ8081RNA / KSZ8081RND LED Definition (11)Micrel, Inc. August 17, 20121.0 IntroductionThe KSZ8081RNA / KSZ8081RND is a 10Base-T/100Base-TX Physical Layer Transceiver with an RMII MAC interface. It utilizes a unique mixed-signal design to extend signaling distance while reducing power consumption, and offers HP Auto MDI/MDI-X for reliable detection of and correction for crossover and straight-through cables, eliminating the need to differentiate between crossover and straight-through cables. It also supports Energy Efficient Ethernet (EEE) and Wake-on-LAN (WOL).The difference between the KSZ8081RNA and KSZ8081RND is the default clocking configuration for the RMII interface. The KSZ8081RNA (by default) outputs a 50 MHz RMII Reference clock, while the KSZ8081RND (by default) takes the 50 MHz RMII Reference clock as an input.The KSZ8081RNA / KSZ8081RND comes in a 24-pin, lead-free QFN package and provides an ideal solution for 10Base-T/100Base-TX applications that have tight PCB board space.The KSZ8081RNA and KSZ8081RND Eval Boards (KSZ8081RNA-EVAL and KSZ8081RND-EVAL) provide a convenient platform to evaluate the features of the device. All configuration pins are accessible either by jumpers, test points or interface connectors.2.0 Board Features∙Micrel KSZ8081RNA or KSZ8081RND 10Base-T/100Base-TX Physical Layer Transceiver∙RJ-45 Jack for Fast Ethernet cable interface∙HP Auto MDI/MDI-X for automatic detection and correction for straight-through and crossover cables∙RMII (Reduced Media Independent Interface) using an MII connector to interface with a MAC controller∙ 2 LED Indicators for status and activity∙USB connector for PC access to the MII management bus∙Jumpers to configure strapping pins∙Manual Reset Button for quick reboot after re-configuration of strapping pins3.0 Evaluation Kit ContentsThe KSZ8081RNA and KSZ8081RND Evaluation Kits include the following hardware: ∙KSZ8081RNA or KSZ8081RND Evaluation BoardA design package with the following collaterals can be downloaded from Micrel’s website at ∙KSZ8081RNA / KSZ8081RND Eval Board Schematic (PDF and OrCAD DSN file)∙KSZ80x1 (24-QFN) Eval Board Gerber Files (PDF version included)∙KSZ8081RNA / KSZ8081RND Eval Board User’s Guide (this document)∙KSZ8081RNA and KSZ8081RND IBIS Modelsand the KSZ8081RNA / KSZ8081RND Datasheet which is also available from Micrel’s website. Micrel, Inc. August 17, 20124.0 Hardware DescriptionThe KSZ8081RNA-EVAL / KSZ8081RND-EVAL (shown in Figure 1) come in a compact form factor and plugs directly into other boards with Ethernet MACs that expose the RMII interface through an MII connector. Configuration of the KSZ8081RNA / KSZ8081RND is accomplished through on-board jumper selections and/or by PHY register access via the MDC/MDIO management pins at the MII connector.Figure 1. KSZ8081RNA / KSZ8081RND Evaluation BoardA USB type B connector provides access to the MDC/MDIO management interface, as an alternative to accessing it through the MII connector. Micrel provides a software utility for accessing the USB interface from a Windows PC.Other features include an RJ-45 Jack for Fast Ethernet cable connection, programmable LED indicator for reporting link status and activity, and a manual reset button for quick reboot after re-configuration of strapping pins.The KSZ8081RNA-EVAL / KSZ8081RND-EVAL receive +5V DC input power either through theMII connector or through the USB connector.Micrel, Inc. August 17, 20124.1 RMII (Reduced Media Independent Interface)The KSZ8081RNA-EVAL / KSZ8081RND-EVAL accesses RMII data from the MII connector J4. This connector is also optionally used for MDC/MDIO management bus access and for 5V power to the evaluation board. Figure 2 shows the KSZ8081RNA-EVAL / KSZ8081RND-EVAL connected to the Micrel KSZ8463RLI Evaluation Board through connector J4.Figure 2. KSZ8081RNA-EVAL interfacing with KSZ8463RLI Evaluation BoardTwo RMII clocking modes are available with the KSZ8081RNA and KSZ8081RND. The KSZ8081RNA powers up in RMII-25MHz Mode, while the KSZ8081RND powers up in RMII-50MHz mode. After power-up, both KSZ8081RNA and KSZ8081RND can be programmed via PHY register 1Fh bit [7] to either 25MHz mode or 50MHz mode.In 25MHz Mode, a 25MHz crystal is connected to the XI and XO pins of the KSZ8081. (Alternatively, a 25 MHz oscillator may drive XI.) The KSZ8081 outputs a 50 MHz RMII Reference Clock on its REF_CLK pin. REF_CLK drives pin 9 of the MII connector J4, for connection to a MAC RMII device on an attached board.In 50MHz Mode, the KSZ8081 receives the 50MHz RMII Reference Clock as an input on the XI pin from pin 12 of the MII connector J4. This clock is sourced from a MAC device (or a separate clock source) on an attached board. No local 25MHz crystal or oscillator is used.These two modes have different component installation requirements on the evaluation board, asshown in Table 1.Micrel, Inc. August 17, 2012RMII Clocking Mode Populate Do Not PopulateKSZ8081RNA 25MHz Mode R11, C16, C17, Y1 R17, R19KSZ8081RND 50MHz Mode R17, R19 R11, C16, C17, Y1Table 1. Board Configuration for RMII Clocking ModesThe KSZ8081RNA-EVAL / KSZ8081RND-EVAL have provision for an oscillator in position Y2. This oscillator is normally not used, and is therefore not populated. If desired, a 25MHz oscillator (and appropriate resistor installation) may be used in place of oscillator Y1 for 25MHz Mode. Likewise, a 50MHz oscillator (and appropriate resistor installation) may be used in place of an off-board RMII reference clock for 50MHz Mode.The Eval Board has a 40-pin male edge connector that interfaces with and plugs directly into a Fast Ethernet MAC board with the mating AMP 787170-4 (40-pin, right angle, female) connector. Table 2 lists the pin outs for the RMII interface on connector J4.Pin # Signal Pin # Signal21 +5V1 +5V22 Ground2 MDIO23 Ground3 MDCused>24 Ground4 <notused>25 Ground5 <not26 Ground6 RXD[1]27 Ground7 RXD[0]28 Ground8 CRSDVused>29 Ground9 <not30 Ground10 RXER31 Groundused>11 <not32 Ground12 TXCLK33 Ground13 TXEN14 TXD034 Ground35 Ground15 TXD116 <not36 Groundused>37 Ground17 <notused>38 Groundused>18 <notused>39 Ground19 <not20 +5V 40 +5VTable 2. Connector J4 - RMII Pin DefinitionMicrel, Inc. August 17, 20124.2 MDC/MDIO Management InterfaceThe MII Management Interface (MIIM) may be conducted through pins MDC (clock line) and MDIO (data line) of the KSZ8081RNA / KSZ8081RND. MIIM allows upper-layer devices to monitor and control the states of the KSZ8081RNA / KSZ8081RND. An external device with MDC/MDIO capability can be used to read the PHY status or configure the PHY registers. The MIIM frame format and timing information can be found in the KSZ8081RNA and KSZ8081RND datasheets and in Clause 22 of the IEEE 802.3 Specification.Two alternatives are available for accessing the MIIM interface. First, the MDC and MDIO signals are available on the MII connector J4 that is utilized for the RMII interface to an external MAC device. Alternatively, the MIIM interface can be accessed through the USB connector CN1. Note that these two methods are mutually exclusive; use either one or the other, but not both. The MDC and MDIO pins of the KSZ8081 are always connected to MII connector J4. Therefore, if MDC and MDIO are driven by a MAC device on the attached board, then this eliminates use of the USB port. The USB port may be used to access MIIM only if the MDC and MDIO signals are unconnected on the board attached to MII connector J4.Also note that the MIIM (MDC and MDIO) signals of the KSZ8081RNA / KSZ8081RND operate at the VDDIO supply voltage, which is configurable as 3.3 / 2.5 / 1.8 V. When MIIM is accessed through the MII connector, the user must ensure that the voltage levels are compatible between the KSZ8081RNA / KSZ8081RND and the connected MAC device. When MIIM is accessed through USB, voltage translation between the KSZ8081RNA / KSZ8081RND and the USB interface chip is provided.4.2.1 USBInterfaceWhen the board attached to MII connector J4 does not drive the MDC and MDIO signals, the USB interface may be used to access the MIIM interface. The board may be powered either from the USB interface or from the MII connector J4, as described below. When the USB interface is used, jumpers JP4 and JP5 must be set properly for power and reset, respectively. Additionally, jumpers JP6 and JP7 must be installed.MIIM Interface Access JP6 & JP7RMII connector J4 OpenUSB connector CN1 CloseTable 3. MIIM Source SelectionTo access the MIIM through USB, install MicrelSwitchPhyTools on a Windows PC. This software includes two useful utilities for USB connections to Micrel Ethernet devices. For MIIM access, use the MicrelMDIOConfigApp.exe application that is included in the MicrelSwitchPhyTools installation..4.3 PowerThe KSZ8081RNA-EVAL / KSZ8081RND-EVAL can draw 5V power from either the RMII connector (J4) or from the USB connector (CN1). Table 4 shows the jumper settings for these two options.Micrel, Inc. August 17, 20125V Source JP1 JP4 JP5RMII connector J4 Close pins 1-2 Close pins 1-2 Close pins 2-3USB connector CN1 Close pins 2-3 Close pins 2-3 Close pins 1-2Table 4. 5V Power Source SelectionThe 5V is regulated to generate 3.3V for the KSZ8081RNA / KSZ8081RND, the USB interface chip and the LED. A second voltage regulator optionally supplies reduced I/O voltage for the KSZ8081RNA / KSZ8081RND.The I/O voltage level of the KSZ8081RNA / KSZ8081RND can be set to one of three different levels. The jumper settings for these options are shown in Table 5.KSZ8081JP2 JP3VDDIO Voltage3.3V Close 1-2 or 2-3 Close pins 2-32.5V Close pins 2-3 Close pins 1-21.8V Close pins 1-2 Close pins 1-2Table 5. VDDIO Voltage Selection4.4 RMII Loopback JumpersThe KSZ8081RNA-EVAL / KSZ8081RND-EVAL have a set of jumpers that may be used to loopback the RMII interface. To loopback, all three jumpers must be installed. The individual jumpers are defined in Table 6.Jumper RMII Signals Normal Operation RMII Loopback ModeJ1 CRS_DV / TXEN Open CloseJ2 RXD1 / TXD1 Open CloseJ3 RXD0 / TXD0 Open CloseTable 6. KSZ8081RNA-EVAL / KSZ8081RND-EVAL Loopback Jumper DefinitionMicrel, Inc. August 17, 2012KSZ8081RNA / KSZ8081RND 10Base-T/100Base-TX Evaluation Board User’s GuideMicrel, Inc. August 17, 2012 Rev. 1.011/114.5 Test Point DefinitionThe KSZ8081RNA-EVAL / KSZ8081RND-EVAL have several test points. They are defined in the following table.Test Point DefinitionTP1SYS_CLK_BTB (50MHz Mode RMII clock, requires installation of R21) TP2, TP8, TP9, TP10, TP11GroundTP3 MDC TP4 MDIO TP5 INTRP TP6 LED0Table 7. KSZ8081RNA-EVAL / KSZ8081RND-EVAL Test Point Definition4.6 RJ-45 ConnectorThe RJ-45 Connector (J5) connects to standard CAT-5 Ethernet cable to interface with 10Base-T / 100Base-TX Ethernet devices.4.7 LED IndicatorsAn LED indicator (LED1) is located adjacent to the RJ-45 Connector.The two LEDs are programmable to LED mode ‘00’ or ‘01’ via register 1Fh bits [5:4], and are defined in the following table.LED ModeLED0 (pin 23)00Link/Activity Pin State LEDDefinition No LinkHOFFLink L ON Activity Toggle Blinking01Link PinState LEDDefinition No LinkHOFFLink L ON 10 Reserved – not used 11Reserved – not usedTable 8. KSZ8081RNA / KSZ8081RND LED Definition。
飞思卡尔热交换控制器使用的板空间减少
飞思卡尔热交换控制器使用的板空间减少
飞思卡尔半导体(Freescal)推出的两款高级电源管理IC现已上市,可以帮助电信和网络设备设计人员减少所需的板卡空间,同时降低系统成本。
飞思卡尔MC34652和MC34653单一芯片热交换控制器可提供负载电流控制和保护功能,有助于防止因电涌引起的严重永久性破坏。
这对电信和网络系统、服务器、电子电路断路器和中心局切换设备用户非常重要,因为他们需要在不关闭系统电源的情况下在-48V底板上插拔电路板。
这些设备还能智能地限制可能对设备造成破坏的任何电涌,从而为系统提供保护功能。
MC34652 和MC34653热交换控制器集成了大多数应用所需的金属氧化物半导体场效应晶体管(MOSFET),可以最大限度地减少对外部组件的需求。
与大多数其它热交换解决方案相比,这一集成功能和小巧的包装可将所需的板空间减少60%以上。
这些功能可以帮助系统设计人员开发经济高效的小体积板卡,并在现有板卡空间内提供新的或增强的系统功能。
MC34652和MC34653都集成一块电源MOSFET来控制负载。
其它功能包括:
MC34652上的最大输出电流为2.0 Amps,MC34653 上的最大输出电流为1.0 Amp
MC34652上的输入电压在-15V到-80V之间,MC34653上的输入电压。
永磁同步电机极对数,内阻,Ld,Lq,背板电动势常数的测量(权威版)

1IntroductionThe vector control, also known as the field-oriented control (FOC), of a permanent magnet synchronous motor (PMSM) is the algorithm often used in today’s advanced motor control drives. Such advanced motor control algorithms require the setting of motor electrical parameters for its proper functionality. This application note deals with themeasurement of electrical parameters needed for vectorcontrol of PMSM. The electrical parameters are needed to set the current PI controller gains to get the desired closed-loop performance and for BEMF observer constants. The proposed measurement techniques determine a number of pole pairs, a stator resistance, synchronous inductances, and an electrical constant with common measurement equipment. A summary of PMSM sensorless control and explanation of motor control terms can be found in [1 ].2Motor parameters needed for PMSM FOCOne of the possible methods to set the PI controller gains, is to calculate them from motor parameters. The current PIcontroller gains in time domain are calculated from the motor electrical parameters [1]; see the following equations.Application NoteRev. 0, 02/2013PMSM Electrical Parameters Measurementby:Viktor Bobek© 2013 Freescale Semiconductor, Inc.Contents1Introduction................................................................12Motor parameters needed for PMSM FOC (13)Motor pole pairs........................................................33.1Background.....................................................33.2Guide.............................................................34Stator resistance.........................................................54.1Background.....................................................54.2Guide.............................................................55Synchronous inductances..........................................75.1Background.....................................................75.2Guide...........................................................116Back-EMF constant................................................126.1Background...................................................126.2Guide (13)7Conclusion...............................................................148References (149)Acronyms and Abbreviated Terms (15)Equation 1Equation 2Where ω0 is the natural frequency of the current closed-loop system (loop bandwidth) and ξ is the current loop attenuation.Therefore, the PMSM vector control algorithm typically requires the following parameters.The speed PI controller gains in time domain are calculated from the motor/load mechanical parameters; see Equation 1 on page 1 and Equation 2 on page 2Equation 3Equation 4Where ω0ω is the natural frequency of the speed closed-loop system (loop bandwidth) and ξ is the speed loop attenuation.Therefore, the PMSM vector control algorithm typically requires the following parameters.The measurement of individual electrical parameters is described in the following chapters of this application note.Motor pole pairs3.1BackgroundThe motor pole pairs parameter defines a ratio between mechanical and electrical quantities (mechanical vs electrical rotor position/speed). The motor pole pairs represent the number of north and south segments the rotor contains.3.2GuideThe equipment required to measure motor pole pairs depend on the method used for measurement.•DC power supply•Three-phase inverter, oscilloscope, hand velocity meter, and a current probe •Driving motor, oscilloscope and a voltage probeUsually, the number of the motor pole pairs is written on the label of the motor. If there is no information regarding the number of pole pairs, it can be determined. See the following subsections.3.2.1Method to determine low number of the pole pairsGuide : The following steps describe the method to determine the low number of motor pole pairs. See Figure 1.1.Connect the phase A wire to the positive potential (+) and phase B and C to negative potential (-) of the voltage source.2.Set a current limit of the power supply to such a level so that the user is able to rotate the shaft manually, and the rotor is aligned in the stable position. Common current limit is about 10% of the rated motor current. For more powerful motor, the current limit is lower.3.Draw a line/sign for every stable position in which the rotor is aligned.4.Number of stable positions is equal to the motor pole pairs.3Figure 1. Method for the determination of low number of pole pairs3.2.2Method to determine high number of the pole pairIt is possible to use two methods for determination high number of pole pairs. Selection of the method depends on available measuring equipment. An oscilloscope is required for measurement in both the methods•Method A : a current probe and an inverter using Volt/Herz method to spin the motor with unknown parameters •Method B : a voltage probe and driving motor, which spins the motorGuide for Method A : The following steps describe the method to determine the high number of motor pole pairs.1.Spin the motor by an inverter using Volt/Herz method and set the frequency in such a way that the motor will spin at a constant, and preferably higher speed.2.Measure the phase current frequency using oscilloscope current probe. The frequency of the phase current must be the same as that generated by Volt/Herz method.3.Measure the speed of the motor by some hand velocity meter. The speed reading must be constant.4.Calculate the number of pole pairs using the equation given below. The result should be very close to an integernumber.Equation 5Figure 2. Current waveform for the determination of high number of the pole pairGuide for Method B : The following steps describe the method to determine the high number of motor pole pairs.1.Spin the motor by an external driving motor at a constant speed.2.Measure the generated voltage frequency.3.Measure the speed of the motor by some hand velocity meter.4.Calculate the motor pole pairs using Equation 5 on page 4.Stator resistance4.1BackgroundA resistance of the stator winding Rs is defined as a resistance between a phase terminal and the center of the winding. The winding resistance is temperature dependent. Usually the resistance value at 25 °C or specified temperature is listed in the motor’s datasheet.Calculate resistance R at operational temperature t (°C) of stator winding (if the temperature is known), using the resistance value measured at temperature t 0 (°C).Equation 6where α is the constant determined by the material (for copper, α = 0.004 K -1)Equation 7For 50 °C temperature difference, R can be calculated as given below.Equation 84.2GuideThe equipment required to measure stator resistance depend on the method used for measurement:•Digital multimeter •RLC meter4Higher values of stator resistance ( > 10 Ω) can be measured by a digital multimeter. The usual stator winding configurationis the wye, so the final stator resistance is half of the measured resistance. The following figure shows the stator resistor measurement using a digital multimeter.Figure 3. Stator resistance measurement by a digital multimeter4.2.2RLC meterLower values of stator resistance can be measured by an RLC meter, for example MOTECH MT 4080A. The four-terminalmeasurement reduces the effect of the test lead resistance. See Figure 4. Usual measurement range is between (10 mΩ–10kΩ). Before the measurement, calibrate the RLC meter (open-circuit, and short circuit). The usual stator windingconfiguration is the wye, so the final stator resistance is half of measured resistance.Figure 4. Four-terminal measurement schematicSynchronous inductances5.1BackgroundThe synchronous inductances of Interior Permanent Magnet Synchronous Motor (IPMSM) winding are different (L d <L q ),because of lower reluctance in q -axis. The synchronous inductances of Surface Mounted Permanent Magnet Synchronous Motor (SMPM) motor are almost equal, because the permanent magnets are surface mounted and reluctance is the same in every position, that is:μPM ≈ μair → L d ≈ L q ,where μPM is the relative permeability of the permanent magnet , and μair is the relative permeability of the air.See the following figure depicting the reluctance paths of d - and q-axis in IPMSM.Figure 5. Reluctance paths in d - and q -axis of IPMSM5In practice, magnetic circuits are subject to saturation as the current increases. Especially, when current I q is increased, the value of L q is decreased. Since I d is maintained to zero or negative value (demagnetizing) in most operating conditions,saturation of L d rarely occurs. The flux linkage λm and L dare subject to armature reaction. See the following figure.Figure 6. Typical inductance characteristic of PMSMNOTEMajority of the applications use single value; however the determination of inductances depends on selected working conditions.In order to measure synchronous inductance, the users must maintain balanced three-phase current condition. When the rotor is aligned with the center of phase A winding, L d (L q ) can be derived from the measured equivalent inductance L of thecircuit, as shown in the following figure.Figure 7. Inductance measurement circuitDepending on the rotor angle θel , it is possible to measure inductance in d -axis or q -axis, where L is the total inductance forserial-parallel connection of the stator winding:Equation 9Equation 10When the rotor is aligned with phase A (θel= 0°) and locked, then the current response is first order RL circuit.Where τ is a time constant of the circuitAfter measuring τ, the inductance LdEquation 13Figure 8. Equivalent phase model of PMSM in d/q axis for a locked rotor shaftSince V d = (2/3)V, V q = 0, and I is the same as I d and the total resistance of the circuit is (3/2)R s , the equivalent inductance seen from the supply source is (3/2)L d . Similar explanation can also be applied to L q when the rotor is locked at 90°electrical.5.1.1Q-axis alignmentTo measure the inductance in q -axis without an inverter, an alignment has to be done into the q -axis. The alignment into d -axis is done by phase A connected to the positive potential (+) and phase B and C are grounded (-). It can be seen from the following figure that 90° electrical shifted position is when phase B terminal is connected to the positive potential (+) of thevoltage source, phase C is grounded (-), and phase A is floating (NC).Figure 9. Explanation of q-axis alignment5.2GuideThe equipment required to measure inductances in q -axis and d -axis are as follows.•DC power supply, oscilloscope, current and voltage probeFigure 10. Set up to measure inductance in q-axisGuide to measure d -axis inductance (non-saturated inductance measurement): Follow the steps given below to measure the d -axis inductance L d .1.Align the rotor to phase A. Phase A is connected to the positive potential (+) and phase B and C are grounded (-).2.Lock the rotor shaft.3.Apply negative step voltage. Phase A is grounded (-) and phases B and C are connected to the positive potential (+).Usual level of the current is about 10% of the rated phase current.4.Measure the step response of the current by a current probe. See Figure 11.5.Calculate inductance L d.Figure 11. Current step response waveformGuide to measure q -axis inductance : Follow the steps given below to measure the q -axis inductance L q .1.Align the rotor to the q -axis. Connect the phase B terminal to the positive potential (+) of the voltage source and phaseC is grounded (-). Phase A terminal is floating.2.Lock the rotor shaft firmly because current step response in q -axis creates torque .3.Generate a current step response in this configuration: phase A is connected to the positive potential (+) of the voltage source and phases B and C are grounded.4.Calculate inductance L q in the same way as L d .Back-EMF constant6.1BackgroundThe back-EMF (BEMF) constant (flux linkage of the PM denoted by λm ) can be obtained by measuring the no-load line voltage V pk of the motor while it is driven through the shaft at a constant speed of ωm . The constant gives a ratio between BEMF voltage and the angular electrical frequency/speed.6Figure 12. Three-phase measurement of the BEMF constant6.2GuideThe equipment required to measure the BEMF constant are listed below.•Oscilloscope and at least one voltage probe•Driving motor or hand drill machineThe steps given below must be followed to determine the BEMF constant.1.Spin the motor by an external driving motor or a hand drill machine at a constant speed. Higher speed is preferred,because the voltage measurement error is lower.2.One-phase measurement : Measure the generated phase voltage (between one phase terminal and neutral point of the motor). Usually the neutral point is not accessible; then measure the line-to-line voltage.Three-phase measurement : If the neutral point is not accessible, it’s possible to create the artificial neutral point from all three voltage probe clips connected together. See Figure 13.3.Calculate the Back-EMF constant according to Equation 14 on page 13.Single phase measurement (line-to-line voltage measurement):Equation 14Three-phase measurement (phase voltage measurement):Equation 15Figure 13. Three-phase oscilloscope measurement of the electrical constant7ConclusionThe application note summarizes methods for determining electrical parameters of PMSM. The precise parametersdetermination is needed for sensorless control applications and desired closed-loop performance. The proposed measurement techniques determine the number of pole pairs, the stator windings resistance, the synchronous inductances, and the electrical constant with common measurement equipment. The parameters are determined using measured applied voltages and responding currents. A single-phase DC voltage power supply can be used to determine the synchronous inductances of three-phase PMSM with sufficient accuracy.8References 1.DRM110: Sensorless PMSM Control for an H-axis Washing Machine Drive, available on .2.MOTECH 4080A Operation Manual, available at9Acronyms and Abbreviated TermsThe following table contains acronyms and abbreviated terms used in this document.How to Reach Us:Home Page:Web Support:/supportUSA/Europe or Locations Not Listed:Freescale SemiconductorTechnical Information Center, EL5162100 East Elliot RoadTempe, Arizona 85284+1-800-521-6274 or +/supportEurope, Middle East, and Africa:Freescale Halbleiter Deutschland GmbH Technical Information CenterSchatzbogen 781829 Muenchen, Germany+44 1296 380 456 (English)+46 8 52200080 (English)+49 89 92103 559 (German)+33 1 69 35 48 48 (French)/supportJapan:Freescale Semiconductor Japan Ltd.HeadquartersARCO Tower 15F1-8-1, Shimo-Meguro, Meguro-ku,Tokyo 153-0064Japan0120 191014 or +81 3 5437 9125support.japan@Asia/Pacific:Freescale Semiconductor China Ltd.Exchange Building 23FNo. 118 Jianguo RoadChaoyang DistrictBeijing 100022China+86 10 5879 8000@Document Number: AN4680Rev. 0, 02/2013Information in this document is provided solely to enable system and software implementers to use Freescale Semiconductors products. There are no express or implied copyright licenses granted hereunder to design or fabricate any integrated circuits or integrated circuits based on the information in this document.Freescale Semiconductor reserves the right to make changes without further notice to any products herein. Freescale Semiconductor makes no warranty, representation, or guarantee regarding the suitability of its products for any particular purpose, nor does Freescale Semiconductor assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any liability, including without limitation consequential or incidental damages. "Typical" parameters that may be provided in Freescale Semiconductor data sheets and/or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters,including "Typicals", must be validated for each customer application by customer's technical experts. Freescale Semiconductor does not convey any license under its patent rights nor the rights of others. Freescale Semiconductor products are not designed,intended, or authorized for use as components in systems intended for surgical implant into the body, or other applications intended to support or sustain life, or for any other application in which failure of the Freescale Semiconductor product could create a situation where personal injury or death may occur. Should Buyer purchase or use Freescale Semiconductor products for any such unintended or unauthorized application,Buyer shall indemnify Freescale Semiconductor and its officers, employees, subsidiaries,affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claims alleges that Freescale Semiconductor was negligent regarding the design or manufacture of the part.RoHS-compliant and/or Pb-free versions of Freescale products have the functionality and electrical characteristics as their non-RoHS-complaint and/or non-Pb-free counterparts.For further information, see or contact your Freescale sales representative.For information on Freescale's Environmental Products program, go to /epp.Freescale™ and the Freescale logo are trademarks of Freescale Semiconductor, Inc.All other product or service names are the property of their respective owners.© 2013 Freescale Semiconductor, Inc.。
基于Freescale MCU与传感器的蓝牙飞鼠设计(上)

基于Freescale MCU 与传感器的蓝牙飞鼠设计(上)
Freescale蓝牙飞鼠简介
本蓝牙飞鼠方案采用FreescaleKinetisL(Cortex-M0+)系列的
MCUMKL16Z256VLH4作为主控芯片,Freescale的Accelerometer,Gyroscope 与e-Compass传感器芯片获取运动空间位置。
系统使用蓝牙无线传输与主机通讯,支持蓝牙HID/HFP/SSP协议,实现鼠标键盘,语音数据以及传感器原始数
据的传输。
下面是Freescale蓝牙飞鼠的主要特点:(1)支持6轴/9轴鼠标与全
键盘;(2)支持游戏杆与体感类型的游戏;(3)使用蓝牙通讯,支持HID/HFP/SSP协议;(4)支持红外控制信号的收发,支持红外自学习;(5)支持语音输入输出以及语
音识别;(6)支持指纹识别模块,实现多用户的切换;(7)支持NFC通讯,蓝牙快速
配对,以及在线支付;(8)支持两种充电方式:USB充电与无线充电(Freescale无
线充电模块)。
tips:感谢大家的阅读,本文由我司收集整编。
仅供参阅!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Analog Integrated Circuit Device Data Freescale Semiconductor
3
PIN CONNECTIONS
PIN CONNECTIONS
RXD EN WAKE TXD
1 2 3 4
8 7 6 5
INH VSUP LIN GND
Figure 3. 33662 8-SOICN Pin Connections Table 2. 33662 8-SOICN Pin Definitions A functional description of each pin can be found in the Functional Pin Description section beginning on page 21.
Pin 1 2 3 4 5 6 7 8 PIN NAME RXD EN WAKE TXD GND LIN VSUP INH Pin Function Output Input Input Input Ground Input/Output Power Output Formal Name Data Output Enable Control Wake Input Data Input Ground LIN Bus Power Supply Inhibit Output Definition This pin is the receiver output of the LIN interface which reports the state of the bus voltage to the MCU interface. This pin controls the operation mode of the interface. This pin is a high-voltage input used to wake-up the device from Sleep mode. This pin is the transmitter input of the LIN interface which controls the state of the bus output. This pin is the device ground pin. This bidirectional pin represents the single-wire bus transmitter and receiver. This pin is the device battery level power supply. This pin can have two main functions: controlling an external switchable voltage regulator having an inhibit input, or driving an external bus resistor in the master node application.
33662
LINCELL
EF SUFFIX (PB-FREE) 98ASB42564B 8-PIN SOICN
Applications • Automotive Market: • Body electronics (BCM, gateway, roof, door, lighting, HVAC) • Powertrain (EMS, start & stop), BMS • Safety & Chassis (TPMS, seat belt)
33662
2
Analog Integrated Circuit Device Data Freescale Semiconductor
INTERNAL BLOCK DIAGRAM
INTERNAL BLOCK DIAGRAM
VSUP
X1 EN
INH_ON INH
200 k
Control Unit
VBAT
33662
VSUP CAN SBC or Regulator 12 V 5.0 V or 3.3 V WAKE VDD MCU EN RXD TXD GND LIN LIN Interface INH
Figure 1. 33662 Master LIN Bus Simplified Application Diagram
33662
4
Analog Integrated Circuit Device Data Freescale Semiconductor
ELECTRICAL CHARACTERTRICAL CHARACTERISTICS
MAXIMUM RATINGS
Table 3. Maximum Ratings All voltages are with respect to ground, unless otherwise noted. Exceeding these ratings may cause a malfunction or permanent damage to the device.
Freescale Semiconductor Advance Information
Document Number: MC33662 Rev. 7.0, 1/2014
LIN 2.1 / SAEJ2602-2, LIN Physical Layer
The Local Interconnect Network (LIN) is a serial communication protocol, designed to support automotive networks in conjunction with a Controller Area Network (CAN). As the lowest level of a hierarchical network, LIN enables cost-effective communication with sensors and actuators when all the features of CAN are not required. The three 33662 versions are designed to operate at different maximum baud rates. The 33662LEF and 33662BLEF, and the 33662SEF and 33662BSEF, offer a normal baud rate (20 kbps), and the 33662JEF and 33662BJEF, a slow baud rate (10 kbps). They integrate a fast baud rate (above 100 kbps), as reported by the RXD pin for test and programming modes. They provide excellent EMC (Electromagnetic Compatibility) and Radiated Emission performance, ESD (Electrostatic Discharge) robustness, and safe behavior, in the event of a LIN bus short-to-ground, or a LIN bus leakage during lowpower mode. This device is powered by SMARTMOS technology. Features • Operational from a VSUP of 7.0 to 18 V DC, functional up to 27 V DC, and handles 40 V during Load Dump • Compatible with LIN Protocol Specification 1.3, 2.0, 2.1, and SAEJ2602-2 • Active bus wave shaping, offering excellent radiated emission performance • Sustains up to 15.0 kV minimum ESD IEC61000-4-2 on the LIN Bus, 20 kV on the WAKE pin, and 25 kV on the VSUP pin • Very high immunity against electromagnetic interference • Low standby current in Sleep mode • Overtemperature protection • Local and remote Wake-up capability reported by the RXD pin • Fast baud rate selection reported by RXD pin • 5.0 V and 3.3 V compatible digital inputs without any required external components
DEVICE VARIATIONS
DEVICE VARIATIONS
Table 1. Device Variations
Freescale Part No. (Add an R2 suffix for Tape and Reel orders) MC33662LEF (1) MC33662BLEF MC33662SEF (1) MC33662BSEF MC33662JEF (1) MC33662BJEF Maximum Baud Rate Temperature Range (TA) Package
20 kbps 20 kbps with restricted limits for transmitter and receiver symmetry 10 kbps