DSP教案2(硬件结构)
第二章DSP硬件结构

17
17
XM
YM
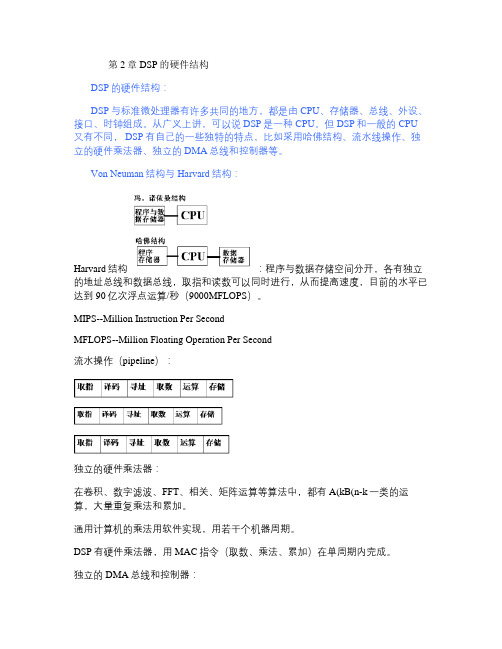
Multiplier(17*17)
FRCT
Fract/int
XA Adder(40)
40 From accumulator A
40
From accumulator B
Legend:
A Accumulator A
B Accumulator B
C CB data bus
D DB data bus
指数编码器
指数编码器用于支持单周期指令 EXP的专用硬件。在EXP指令中, 累加器中的指数值能以二进制补码 的形式存储在T寄存器中,范围为 bit-8至31。指数值定义为前面的 冗余位数减8的差值,即累加器中 为消除非有效符号位所需移动的位 数。当累加器中的值超过了32bits ,该操作将产生负值。
AH
累加器A高字(31 -16比特)
1A
BRC
块重复计数器
A
AG
累加器A保护位 (39-32比特)
1B RSA 块重复开始地址 1C REA 块重复结束地址
B
BL
累加器B低字(15 -0比特)
1D
PMS T
状态寄存器
C
BH
累加器B高字(31 -16比特)
1E
XPC PC扩展寄存器
D
BG
累加器B保护位 (39-32比特)
Sign control
SXM
Barrel shifter (-16~31)
40 MSW/LSM Write select
16 EB15-EB0
T:-16 through 31 range
ASM(4-0):-16 through 15 range
Instruction register immediate:-16 Through 15 or 0 through 15 range
DSP原理及应用第二章DSP的硬件结构总结(精)
第2章DSP的硬件结构DSP的硬件结构:DSP与标准微处理器有许多共同的地方,都是由CPU、存储器、总线、外设、接口、时钟组成。
从广义上讲,可以说DSP是一种CPU。
但DSP和一般的CPU 又有不同, DSP有自己的一些独特的特点,比如采用哈佛结构、流水线操作、独立的硬件乘法器、独立的DMA总线和控制器等。
Von Neuman结构与Harvard结构:Harvard结构:程序与数据存储空间分开,各有独立的地址总线和数据总线,取指和读数可以同时进行,从而提高速度,目前的水平已达到90亿次浮点运算/秒(9000MFLOPS)。
MIPS--Million Instruction Per SecondMFLOPS--Million Floating Operation Per Second流水操作(pipeline):独立的硬件乘法器:在卷积、数字滤波、FFT、相关、矩阵运算等算法中,都有A(kB(n-k一类的运算,大量重复乘法和累加。
通用计算机的乘法用软件实现,用若干个机器周期。
DSP有硬件乘法器,用MAC指令(取数、乘法、累加)在单周期内完成。
独立的DMA总线和控制器:有一组或多组独立的DMA总线,与CPU的程序、数据总线并行工作,数据的传递和处理可以独立进行,DMA内部总线与系统总线完全分开,避开了总线使用上的瓶颈。
在不影响CPU工作的条件下,DMA速度已达800Mbyte/s。
CPU:通用微处理器的CPU由ALU和CU组成,其算术运算和逻辑运算通过软件来实现,如加法需要10个机器周期,乘法是一系列的移位和加法,需要数十个机器周期。
DSP的CPU设置硬件乘法器,可以在单周期内完成乘法和累加.移位:通用微处理器的移位,每调用一次移位指令移动1-bitDSP可以在一个机器周期内左移或右移多个bit,可以用来对数字定标,使之放大或缩小,以保证精度和防止溢出;还可以用来作定点数和浮点数之间的转换.溢出:通用CPU中,溢出发生后,设置溢出标志,不带符号位时回绕,带符号位时反相,带来很大的误差DSP把移位输出的最高位(MSB)存放在一个位检测状态寄存器中,检测到MSB=1时,就通知下一次会发生溢出,可以采取措施防止.数据地址发生器(DAG):在通用CPU中,数据地址的产生和数据的处理都由ALU来完成在DSP中,设置了专门的数据地址发生器(实际上是专门的ALU),来产生所需要的数据地址,节省公共ALU的时间.外设(peripherals):时钟发生器(振荡器与PLL)定时器(Timer)软件可编程等待状态发生器通用I/O同步串口(SSP)与异步串口(ASP)JTAG扫描逻辑电路(IEEE 1149.1标准便于对DSP作片上的在线仿真和多DSP条件下的调试’C54x的内部结构:中央处理器CPU 、内部总线控制、特殊功能寄存器、数据存储器RAM 、程序存储器ROM、I/O功能扩展接口、串行口、、主机通信接口HPI、定时系统、中断系统。
DSP原理及应用第二章DSP的硬件结构总结(精).doc

DSP原理及应用第二章DSP的硬件结构总结(精)【例2.4.1】累加器A=FF01234567H,执行带移位的STH 和STL指令后,求暂存器T和A的内容。
2.4.3桶形移位寄存器:TMS320C54x的40位桶形移位寄存器主要用于累加器或数据区操作数的定标。
它能将输入数据进行0~31位的左移和0~16位的右移。
所移动的位数可由ST1中的ASM或被指定的暂存器T决定。
1.组成框图①多路选择器MUX:用来选择输入数据。
②符号控制SC:用于对输入数据进行符号位扩展。
③移位寄存器:用来对输入的数据进行定标和移位④写选择电路:用来选择最高有效字和最低有效字。
2.桶形移位寄存器的输入通过多路选择器MUX来选择输入信号。
①取自DB数据总线的16位输入数据;②取自DB和CB扩展数据总线的32位输入数据;③来自累加器A或B的40位输入数据。
3.桶形移位寄存器的输出①输出至ALU的一个输入端;②经写MSW/LSW选择电路输出至EB总线。
4.桶形移位寄存器的功能主要用于格式化操作,为输入的数据定标。
①在进行ALU运算之前,对输入数据进行数据定标;②对累加器进行算术或逻辑移位;③对累加器进行归一化处理;④在累加器的内容存入数据存储器之前,对存储数据进行定标。
2.4.5比较、选择和存储单元CSSUCSSU单元主要完成累加器的高阶位与低阶位之间最大值的比较,即选择累加器中较大的字,并存储在数据存储器中。
工作过程:①比较电路COMP将累加器A或B的高阶位与低阶位进行比较;②比较结果分别送入TRN和TC中,记录比较结果以便程序调试;③比较结果输出至写选择电路,选择较大的数据;④将选择的数据通过总线EB存入指定的存储单元。
例如,CMPS指令可以对累加器的高阶位和低阶位进行比较,并选择较大的数存放在指令所指定的存储单元中。
指令格式:CMPSA,*AR1功能:对累加器A的高16位字(AH)和低16位字(AL)进行比较,若AH>AL,则AH→*AR1,TRN左移1位,0→TRN(0,0→TC;若AH,则AL→*AR1,TRN 左移1位,1→TRN(0,1→TC。
dsp硬件设计课程设计
dsp硬件设计课程设计一、教学目标本课程的教学目标是使学生掌握DSP硬件设计的基本原理和方法,培养学生进行DSP硬件系统设计和实现的能力。
具体目标如下:1.掌握DSP芯片的基本结构和原理。
2.了解DSP硬件设计的基本流程和步骤。
3.熟悉DSP系统的硬件架构和关键模块。
4.能够使用DSP芯片进行硬件系统设计。
5.能够进行DSP系统的硬件调试和验证。
6.能够分析和解决DSP硬件设计中遇到的问题。
情感态度价值观目标:1.培养学生的创新意识和团队合作精神。
2.培养学生对DSP硬件设计的兴趣和热情。
3.培养学生对科技发展的关注和对工程实践的重视。
二、教学内容本课程的教学内容主要包括以下几个部分:1.DSP芯片的基本结构和原理:介绍DSP芯片的内部结构、工作原理和特性。
2.DSP硬件设计的基本流程和步骤:讲解DSP硬件设计的过程,包括需求分析、硬件架构设计、硬件电路设计、硬件调试和验证等。
3.DSP系统的硬件架构和关键模块:介绍DSP系统的硬件架构,包括中央处理单元、存储器、输入输出接口等关键模块。
4.DSP硬件设计的实践案例:通过实际案例分析,使学生掌握DSP硬件设计的方法和技巧。
三、教学方法本课程的教学方法将采用多种教学手段相结合的方式,以激发学生的学习兴趣和主动性。
1.讲授法:通过教师的讲解,使学生掌握DSP硬件设计的基本原理和方法。
2.讨论法:通过分组讨论和实践案例的分析,培养学生的思考能力和团队合作精神。
3.实验法:通过实验操作,使学生熟悉DSP硬件设计的实践过程和技巧。
四、教学资源本课程的教学资源包括教材、参考书、多媒体资料和实验设备等。
1.教材:选择适合本课程的教材,为学生提供系统的学习资料。
2.参考书:提供相关的参考书籍,为学生提供更多的学习资源。
3.多媒体资料:制作课件和教学视频,以图文并茂的形式展示教学内容。
4.实验设备:提供DSP实验板和相关的实验设备,为学生提供实践操作的机会。
五、教学评估本课程的教学评估将采用多元化评估方式,全面客观地评价学生的学习成果。
DSP技术硬件结构2

存储器接口单元(M单元) --内部数据流、指令流接口
指令缓冲单元(I单元) --指令缓冲队列和指令译码
程序流单元(P单元) --产生程序空间地址
地址数据流单元(A单元) --产生读/写数据空间地址 数据计算单元(D单元) --数据处理 内部地址总线与数据总线
C55x CPU内部总线结构
图2-5 P单元结构框图
程序地址产生逻辑: P单元寄存器: 产生24位的程序空间取指的地址; 1、程序流寄存器 一般情况下产生顺序地址, PC、RETA、CFCT 也可以I单元的立即数或D单元的 2、块重复寄存器 寄存器值作为地址 BRC0、BRC1、BRS1 程序控制逻辑: RSA0、RSA1、REA0、REA1 接收来自I单元的立即数,测试 3、单重复寄存器 来自A单元或D单元的结果,并把测试 RPTC、CSR 结果送程序地址发生器; 4、中断寄存器 测试内容如: IFR0、IFR1、IER0、IER1、 条件指令 DBIER0、DBIER1 中断请求 5、状态寄存器 ST0-55、 ST1-55、 ST2-55、 ST3-55、 单一指令重复或块指令重复
算术逻辑单元(ALU)
辅助寄存器字长 辅助寄存器
1(40位)
2字节(16位) 8
1(40位) 1(16位)
3字节(24位) 8
存储空间
数据寄存器
独立的程序/数据空间
0
统一的程序/数据空间
4
C55x的特征及优点
特征
一个 32位 x 16位指令缓冲 队列 两个17位x17位的乘法累加 器 一个40位算术逻辑单元 (ALU) 一个40位桶形移位寄存器
图2-8 指令流水线(取指阶段) 表2-6 取指阶段流水线的意义
DSP课件第二章TMS320LF240x硬件结构
当片内外设产生中断时,CPU响应中断并执行相应的中断服务程序 对片内外设进行操作。
05
TMS320LF240x的电源管理和低功耗
模式
电源管理单元
电源管理单元(PMU)是TMS320LF240x芯片中的一个重要组成部分,负责控制芯 片的电源供应和功耗管理。
PMU包含多个电源域,可独立控制各个电源域的开启和关闭,以实现灵活的功耗管 理。
较
他设备进行数据交换,可配 置为发送或接收模式。
器
比较器用于检测电压或电平 是否达到预设值,输出电平
可配置为高或低,常用于 PWM控制或阈值检测。
看门 狗定 时器
片内外设的访问方式
直接访问
通过特定的寄存器地址直接读写片内外设的控制寄存器和数据寄 存器。
间接访问
通过特定的寄存器地址读写片内外设的控制寄存器来配置片内外设, 再通过数据寄存器进行数据传输。
PMU还具有过压和欠压保护功能,以确保芯片在异常电源条件下能够安全运行。
低功耗模式
TMS320LF240x支持多种低功 耗模式,以便在不需要时降低芯
片功耗。
低功耗模式通过关闭不需要的内 部时钟和电源域来实现功耗降低。
在低功耗模式下,芯片的某些功 能将被禁用,但仍可以响应外部 事件或中断,并在必要时唤醒。
需求。
输入输出电平
02
TMS320LF240x的输入输出电平一般为CMOS电平,能够与
TTL和CMOS电路兼容。
驱动能力
03
TMS320LF240x的驱动能力较强,能够驱动较大规模的外部电
路。
封装形式
• TMS320LF240x的封装形式一般为塑封或陶瓷封装,具体 取决于应用需求和生产厂家。
DSP系统硬件设计_二_DSP系统硬件原理图_PCB设计和系统调试技巧

DSP 系统硬件设计(二)——DSP系统硬件原理图、PCB设计和系统调试技巧北京飓风中天科技发展有限公司 朱铭锆DSP硬件设计包括:硬件方案设计、DSP及周边器件选型、原理图设计、PCB设计及仿真、硬件调试等。
前一讲我们详细讲述了硬件方案设计、DSP及周边器件选型两部分内容,本讲详细讲述原理图设计、PCB设计、硬件调试等内容。
以期共享设计的经验,并能够提高大家的设计效率。
一、系统资源规划硬件设计的前提需要做的一件事是对整个系统的资源进行规划,最终得到系统的资源分配表,即Memory Map。
表1提供了一个用TMS320DM642设计的图像处理系统的地址映射表。
通过表1我们可以清晰地看到程序空间、数据空间、图像输入口等资源的地址。
经过对系统资源的规划,我们的硬件设计才能够有整体的规划,不然设计出来的原理图就是非常盲目的“无源之水”。
二、硬件原理图设计DSP的芯片厂家在设计出每一种DSP芯片时一般都提供了相应的EVM(评估板)参考原理图设计,大家可以通过网络免费下载,或通过购买原装的EVM板得到。
详细的针对某一个板的原理我们就不细讲解,根据作者多年从事DSP设计的经验把设计中的技巧总结出来与大家分享。
硬件设计时,应重点注意以下几点。
(1)时钟电路。
DSP时钟可由外部提供,也可由板上的晶振提供。
但一般DSP系统中经常使用外部时钟输入,因为使用外部时钟时,时钟的精度高、稳定性好、使用方便。
由于DSP工作是以时钟为基准,如果时钟质量不高,那么系统的可靠性、稳定性就很难保证。
因此,若采用外部时钟,选择晶振时应对其稳定性、毛刺做全面的检验,以便DSP系统可靠地工作。
(2)复位电路。
应同时设计上电复位电路和人工复位电路,在系统运行中出现故障时可方便地人工复位。
对于复位电路,一方面应确保复位低电平时间足够长(一般需要20ms以上),保证DSP可靠复位;另一方面应保证稳定性良好,防止DSP误复位。
(3)在DSP电路中,对所有的输入信号必须有明确的处理,不能悬浮或置之不理。
第三章_DSP的硬件结构

多总线:片内多条数据、地址和控制总线。
ROM/ Flash External address bus B0 DARAM B1, B2 DARAM PAB DRAB DWAB External data bus MemoryMapped Registers
SARAM
PRDB DRDB DWEB Control Bus
5.移位
通用微处理器的移位,每调用一次移 位指令移动1-bit。 DSP可以在一个机器周期内左移或右 移多个bit(速度更快),可以用来对数字 定标,使之放大或缩小,以保证精度和防 止溢出;还可以用来作定点数和浮点数之 间的转换(把指数移出来)。
6.溢出
通用CPU中,溢出发生后(已经发生溢 出了),才设置溢出标志。当不带符号位时 回绕。带符号位时反相,带来很大的误差。 DSP把移位输出的最高位(MSB)存放 在一个位检测状态寄存器中,检测到MSB=1 时,(还未发生,可能将要发生)就通知下 一次会发生溢出,可以采取措施防止。
对慢速的外部逻辑和存储器接口访问时, 通过等待状态来延迟CPU等待外部存储器或外 部端口的时间以便更好地响应。
9、特殊的DSP指令
• • • • DMOV——延迟操作 LTD——LT、DMOV、APAC MACD—— LT、DMOV、MPY、APAC RPTK——重复执行
含有多功能指令,采用MACD指令,它在一个指令周期 内就能完成乘法,累加和数据移动3项功能,相当于执行 了LT,DMOV,MPY和APAC4条指令。
32-bit accumulator Shift L (0-7)
8 auxiliary registers 8-level hardware stack Repeat count 2 status registers
2-DSP的硬件结构

● 将它们快速地存放到数据存储器;
● 由数据存储器对它们进行加载;
● 用子程序或中断服务程序保存和恢复
处理器的状态。
1.状态寄存器0(ST0)
主要反映处理器的寻址要求和计算机的运行状态。
ST0的结构:
15 —13 12 11 10 9 8 —— 0
ST0: ARP ARP
TC TC
C C
OVA OVA
正向溢出: 最大正数 00 7FFF FFFFh 负向溢出: 最小负数 FF 8000 0000h
位于状态寄存 器ST1的8位
进位位:支持扩展精度运算 双16位操作数运算(C16=1)
位于状态寄存 器ST0的11位
2、C54x的累加器
TMS320C54X芯片有两个独立的40位累加 器A和B 累加器ACCA和ACCB存放从ALU或乘法器/ 加法器单元输出的数据,累加器也能输出 到ALU或乘法器/加法器中。 累加器A中的32~16位能被用做乘法-累加单 元中的乘法器输入,而累加器B则不能。
3、CPU状态和控制寄存器 ’C54x提供三个16位寄存器来作为CPU状态和控 制寄存器,它们分别为: 状态寄存器0(ST0)
状态寄存器1(ST1)
工作方式状态寄存器(PMST)
ST0和ST1主要包含各种工作条件和工作方式的 状态;
PMST包含存储器的设置状态和其他控制信息。
由于这些寄存器都是存储器映像寄存器,因此 可以很方便地对它们进行如下数据操作:
带移位的累加器存储操作: ① 使用STH、SACCD和并行存储指令存储累加器内容
使用STH、STL、STLM、SACCD等指令或并 行存储指令,可以把累加器中的内容保存到数据存 储器中。 先将累加器内容移位,再将高16位存入存储器。
第二章DSP的硬件结构(整理)

√
√
中央处理单元(CPU)
状态和控制部件、运算部件和各种寄存器
1.CPU状态和控制寄存器(3个16位存储器映像寄存器)
• (1) 状态寄存器0(ST0); • (2) 状态寄存器1(ST1); • (3) 处理器工作模式状态寄存器(PMST)。 • ST0和ST1主要包含各种工作条件和工作方式的状态;PMST
CLKOUT、器件电压等 – (7)不同内核电压以获取不同的芯片运行速度:
5.0v-40MIPS,3.3v-80MIPS,2.5v-100MIPS,1.8v200MIPS。
总线结构
一组程序总线PB
– 传送从程序存储器读取的指令代码和立即数;
三组数据总线(CB、DB、EB)
– CB,DB: 传送从数据存储器读出的操作数; – EB: 传送写入到数据存储器中的数据;
– (2) 存储器系统
• 包括片内程序ROM、片内单访问的数据RAM和 双访问的数据RAM、外接存储器接口。
– (3) 片内外设与专用硬件电路
• 包括片内定时器、各种类型的串口、主机接口、 片内锁相环(PLL)、时钟发生器及各种控制电路。
系统控 制界面
系统控制
PAB PB
CAB CB
DAB DB
EAB EB
15~0 BL(低阶位)
中央处理单元(CPU)
2.运算部件
– (3)Barrel Shifter
• 功能:能把输入的数据进行0~31bit左移和0~ 16bit右移。
• 移位数定义:
– 用一个立即数(-16~15)表示。 – 用状态寄存器ST1的累加器移位方式(ASM)位表示,共
5位,移位数为-16~15。 – 用T寄存器中最低6位的数值(移位数为-16~31)表示
DSP原理及应用DSP芯片的硬件结构节讲稿

TM
9
9
第2章 TMS320C54x的硬件结构
2.2.2 ’ C54x的引脚功能
’C5402共有144个引脚,引脚分布如图。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 144 143 142 141 140 139 138 137 136 135 134 133 132 131 130 129 128 127 126 125 124 123 122 121 120 119 118 117 116 115 114 113 112 111 110 109 108 107 106 105 104 103 102 101 100 99 98 97 96 95 94 93 92 91 90 89 88 87 86 85 84 83 82 81 80 79 78 77 76 75 74 73
《DSP原理及应用》 成都理工大学工程技术学院 石坚
TM
3
3
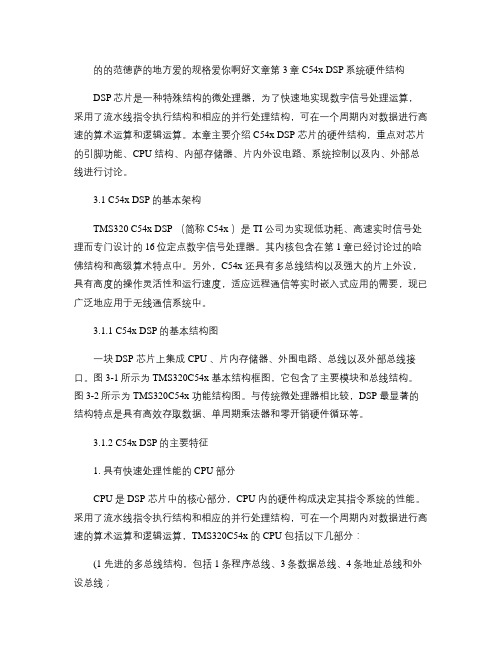
第2章 TMS320C54x的硬件结构 2. ’C54x的内部结构
PAB PB
系统 控制 接口 PAGEN 系统控制 DAGEN 数据地址生成器 程序地址生成器 特殊功能 寄存器
TMS320C54x的硬件结构图 程序存储器
数据存储器 串行口 并行口 定时器 计数器 外部 设备 接口 外部 存储器 接口
TMS320VC5402
《DSP原理及应用》 成都理工大学工程技术学院 石坚
TM
37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72
2 DSP原理与应用教案 内部资源

《DSP原理与应用》教案(2)教学课时:2学时二、TMS320LF240x内部资源内部资源是非常重要的内容。
我们在进行底层的硬件设计、软件设计时,必须要对控制器的内部资源和基本结构有很清楚的了解,否则无法熟练地完成设计任务。
2.1 TMS320LF240x CPU内部功能模块TMS320LF240x DSP CPU内部功能模块是TMS320LF240x DSP的核心,了解它对硬件和软件设计都具有重要的意义。
下图2-1是TMS320LF240x CPU的功能模块图。
图2-1 TMS320LF240x DSP CPU功能模块图表2-1 TMS320LF240x DSP CPU功能模块术语说明状态寄存器ST0和ST1TMS320LF240x DSP有两个状态寄存器ST0和ST1,含有各种状态和控制位,是应用中特别重要的两个寄存器。
其内容可被保存到数据存储器,或从数据存储器读出加载到ST0和ST1,从而在子程序调用或进入中断时,实现CPU各种状态的保存。
加载状态寄存器指令LST将数据写入ST0和ST1,而保存状态寄存器指令SST则将ST0和ST1的内容读出并保存起来。
INTM位不受LST指令的影响。
当采用SETC指令和CLRC 指令时,这些寄存器的每一位都可被单独置1或清0。
表2-2 状态寄存器ST0和ST1的字段定义输入定标移位器(input scaling shifter )TMS320LF240x DSP 器件提供了一个输入定标移位寄存器,它将来自程序存储器或数据存储器的16位数据调整为32位数据送到中央算术逻辑单元(CALU )。
因此其16位输入与数据总线相连,32位输出与CALU 单元相连。
由于输入定标移位器作为从程序/数据存储空间到CALU 间数据传输路径的一部分,因此不会占用时钟开销。
它在算术定标,以及在逻辑操作对屏蔽定位设置中非常有用。
输入定标移位器对输入数据进行0~15位左移。
左移时,输出的最低有效位LSB 段填0;最高有效位MSB 根据状态寄存器ST1的SXM (符号扩展方式)位的值来决定是否需要进行符号扩展。
DSP器件及其应用DSP的硬件结构PPT学习教案

单个周期内计算40位累加器中数值的指数。
双地址生成器,包括8个辅助寄存器和2个辅助寄存器算术运算
单元(ARAU)。
34
第33页/共90页
TMS320C54x的硬件结构
1 TMS320C54x的内部结构和主要特性
1.2 TMS320C54x的主要特性
2.存储器 16位192K字的可寻址存储空间(64K字的程序存储空间、
立的地址总线和数据总线,取指和 读数可以同时进行,从而提高速度, 目前的水平已达到90亿次浮点运算 /秒(9000MFLOPS)
MIPS--Million Instruction Per
Second
第3页/共90页
MFLOPS--Million Floating
DSP芯片的特点
哈佛结构
程序 存储器
35
第34页/共90页
TMS320C54x的硬件结构
1 TMS320C54x的内部结构和主要特性
1.2 TMS320C54x的主要特性
3.片外设
软件可编程等待状态发生器。 可编程分区切换逻辑电路。 带有内部振荡器或用外部时钟源的片内锁相环时钟发生器。 支持全双工操作的串行口,可进行8位或16位串行通信。 片内的串行口根据型号不同可分为4种:单通道同步串行口
❖ DSP的CPU设置硬件乘法器,可以在单 周期内完成乘法和累加
DSP系统硬件结构DSP芯片是一种特殊结构的微处理器,为了快(精)
(5指数编码器,可以在单周期内计算40位累加器的指数值;
(6 2个地址生成器,包括8个辅助寄存器和2个辅助寄存器算术单元;
(7双内核结构(只适用于C5420 .
2.具有哈佛结构的存储器系统
(1具有独立的程序存储器和数据存储器,可同时访问,使许多处理运算比传统的冯·诺依曼结构有效得多。
(2具有192 K字可寻址存储空间,包括片内、外64 K字程序存储空间,片内、外64 K字数字存储空间和片外64 K字的I/O空间。其中一些型号DSP的程序存储器空间可扩展至8 M字,例如TMS320C548、TMS320C549、TMS320C5402、TMS320C5410和TMS320C5420.
图3-3存储器空间分配图
图3-3(续)
所有C54x DSP器件提供一定数量的片内ROM和RAM, DSP有两种类型的RAM,包括双寻址RAM (DARAM)和单寻址RAM (SARAM。表3-3列出了不同C54x系列DSP片内各种存储器的配置。
1.片内ROM
片内ROM是程序存储器的一部分,对某些DSP器件来说,也可是数据存储空间的一部分,如C5402。当MP/MC设置为0时,可以映射到程序存储空间的ROM为4 KB;当DROM设置为1时,可以映射到数据存储器空间的ROM为4 KB。不同芯片的片内可用ROM容量是不一样的,见表3-3。对于ROM少的DSP器件(2 KB , ROM中含有自举加载器,在程序启动时,将用
PB数据总线CBDBEB程序读√√程序写√√单数据读√√双数据读√√√√32位长数据读√(hw√(lw√(hw√(lw单数据写√√数据读/数据写√√√√双数据读/系数读√√√√√√外设读√√外设写√√3.3存储器结构
DSP课件第2章 硬件结构

当未检测到累加器溢出时,OV=0,未被锁存;当溢出发生时, OV=1且被锁存。
5、辅助寄存器算术单元(ARAU)
寻址功能
用指令把0~7写入辅助寄存器指针ARP,即选择了一个辅助寄存 器。ARP所指的寄存器称当前辅助寄存器。
处理一条指令时,当前AR的内容用做访问数据存储器的地址。若 指 令 是 读 数 据 , ARAU把 该 地 址 送 到 DRAB ; 若 指 令 是 写 数 据 , ARAU把该地址送到DWAB,指令执行完后,当前AR的内容可通过 ARAU进行无符号运算,即增量或减量。
是电可擦除的、可编程的、可长期保存数据的存储器。
3、程序存储器
程序存储空间用于保存程序代码、表格和立即操作数等。地址空间 为64K字,包括片内DARAM和片内ROM/Flash。当DSP产生一个超出 配置为片内程序存储范围的地址时,器件会自动产生访问外部程序存储 器的相应信号,进行外部存储器的访问操作。
用SETC或CLRC指令可对其中的某些位单独置1或清0
状态寄存器ST0 D15~D13
ARP
D12
OV
D11
OVM
D10
1
D9
INTM
D8~D0
DP
ARP:辅助寄存器(AR)指针。 用于选择在间接寻址方式时使用的辅助寄存器AR0~AR7,用 MAR、LST指令和间接寻址访问存储器指令可以加载ARP。当ARP 被装载时,先前的ARP被复制到ARB缓存器。
MP/ MC
4、数据存储器
数据存储器配置
数据存储空间的可寻址范围为64K字,32K字是内部数据存储器, 包括存储映射寄存器、DARAM和外设映射寄存器,另外的32K字是外 部数据存储器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
’C54X的结构特点 C54X的结构特点
存储块移动指令提供了更好的程序和数据管 理 支持32-bit长操作数指令,支持两个或三个操 长操作数指令, 支持 长操作数指令 作数读指令, 作数读指令,支持并行存储和并行装入的算术 指令, 指令,支持条件存储指令及中断快速返回指令 软件可编程等待状态发生器和可编程的存储 单元转换
比较,选择和存储单元(CSSU) 比较,选择和存储单元(CSSU)
比较、选择和存储单元 ( CSSU) 完成累加器的高 ) 位字和低位字之间的最大值 比较, 比较,即选择累加器中较大 的字并存储在数据存储器中, 的字并存储在数据存储器中, 不改变状态寄存器ST0中的 不改变状态寄存器 中的 测试/控制位和传送寄存器 测试 控制位和传送寄存器 ( TRN) 的 值 。 同 时 , ) CSSU利用优化的片内硬件 利用优化的片内硬件 促进Viterbi型蝶形运算。 型蝶形运算。 促进 型蝶形运算
第二章: 第二章:‘C5000 DSP硬件结构 硬件结构
在这一章中,我们介绍 在这一章中,我们介绍:
TMS320C54XX硬件结构 特点 ★
’C54X的结构特点 C54X的结构特点
多总线结构,三组 多总线结构,三组16-bit数据总线和一组程序 数据总线和一组程序 总线 40-bit算术逻辑单元(ALU),包括一个 算术逻辑单元( ),包括一个 算术逻辑单元 ),包括一个40bit的桶形 的桶形 移位器和两个独立的40-bit累加器 累加器 移位器和两个独立的 17x17-bit并行乘法器,连接一个40-bit的专用 并行乘法器,连接一个 并行乘法器 的专用 加法器, 加法器,
CPU状态和控制寄存器 CPU状态和控制寄存器
有三个状态和控制寄存器, ‘C54x有三个状态和控制寄存器,它们分别为: 有三个状态和控制寄存器 它们分别为: 状态寄存器ST0,状态寄存器 状态寄存器 ,状态寄存器ST1和处理器方 和处理器方 式状态寄存器PMST。ST0和ST1包括了各种条 式状态寄存器 。 和 包括了各种条 件和方式的状态, 件和方式的状态,PMST包括了存储器配置状 包括了存储器配置状 态和控制信息。 态和控制信息。
存储器分配: 存储器分配:
分页管理数据存储器
片内外设: 片内外设:
• 两个通用 引脚,/BIO和XF。 • 软件可编程等待 两个通用I/O引脚, 引脚 和 。 状态发生器。 状态发生器。 • 可编程块切换逻辑。 可编程块切换逻辑。 主机接口(HPI) • 主机接口(HPI) : 8/16 bit • 硬件定时器。 硬件定时器。 时钟发生器。 • 时钟发生器。 • 串口:(同步、缓冲和时分多路(TDM),McBSP)。 • 外部总线接口。 外部总线接口。 1149.1标准扫 • IEEE 1149.1标准扫 描逻辑。 描逻辑。
累加器: 累加器:
累加器ACCA和ACCB存放从 和 存放从ALU或乘 累加器 存放从 或乘 法器/加法器单元输出的数据 加法器单元输出的数据, 法器 加法器单元输出的数据,累加器也 能输出到ALU或乘法器 加法器中。 或乘法器/加法器中 能输出到 或乘法器 加法器中。
ALU框图: 框图: 框图
乘法器/ 乘法器/加法器单元
乘法器/加法器与一个 乘法器 加法器与一个40-bit的累加器在一个单指令周期 加法器与一个 的累加器在一个单指令周期 里完成17x17-bit的二进制补码运算。乘法器 加法器单元 的二进制补码运算。 里完成 的二进制补码运算 乘法器/加法器单元 由以下部分组成:乘法器,加法器,带符号/无符号输入 由以下部分组成:乘法器,加法器,带符号 无符号输入 控制,小数控制,零检测器,舍入器(二进制补码), 控制,小数控制,零检测器,舍入器(二进制补码), 溢出/饱和逻辑和暂存器 TREG)。 饱和逻辑和暂存器( 溢出/饱和逻辑和暂存器(TREG)。 乘法器有两个输入:一个是从TREG,数据存储器操作 乘法器有两个输入:一个是从 , 或一个累加器中选择;另一个则从程序存储器, 数,或一个累加器中选择;另一个则从程序存储器,数 据存储器,一个累加器或立即数中选择。 据存储器,一个累加器或立即数中选择。 另外,乘法器和ALU在一个指令周期里共同执行乘 累加 在一个指令周期里共同执行乘/累加 另外,乘法器和 在一个指令周期里共同执行乘 运算。 (MAC)运算且并行 )运算且并行ALU运算。这个功能可用来确定 运算 欧几里德距离,以及完成复杂的DSP算法所需要的 算法所需要的LMS 欧几里德距离,以及完成复杂的 算法所需要的 滤波
指数编码器
指数编码器用于支持单周期指令 EXP的专用硬件。在EXP指令中, 的专用硬件。 指令中, 的专用硬件 指令中 累加器中的指数值能以二进制补码 的形式存储在T寄存器中 寄存器中, 的形式存储在 寄存器中,范围为 bit-8至31。指数值定义为前面的冗 至 。 余位数减8的差值 的差值, 余位数减 的差值,即累加器中为 消除非有效符号位所需移动的位数 当累加器中的值超过了32bits, 。当累加器中的值超过了 , 该操作将产生负值。 该操作将产生负值。
’C54X的结构特点 C54X的结构特点
数据总线具有总线保持特性 C548,549,5402,5410等具有扩展寻址方式,最 等具有扩展寻址方式, 等具有扩展寻址方式 大可寻址扩展程序空间为8Mx16-bit 大可寻址扩展程序空间为 C54X可访问的存储器空间最大可为 可访问的存储器空间最大可为192Kx16可访问的存储器空间最大可为 bit(64K程序存储器,64K数据存储器和 程序存储器, ( 程序存储器 数据存储器和 64KI/O存储器) 存储器) 存储器 支持单指令循环和块循环
桶形移位器
‘C54x的桶形移位器有一个与累加器或 的桶形移位器有一个与累加器或 数据存储器( , )相连接的40-bit 数据存储器(CB,DB)相连接的 输入,和一个与ALU或数据存储器(EB) 或数据存储器( ) 输入,和一个与 或数据存储器 相连接的40-bit输出。桶形移位器能把输 输出。 相连接的 输出 入的数据进行0到31bits的左移和 到 入的数据进行 到 的左移和0到 的左移和 16bits的右移。所移的位数由 的右移。 的右移 所移的位数由ST1中的移 中的移 位数域( 位数域(ASM)或被指定作为移位数寄 ) 存器的暂存器( 存器的暂存器(TREG)决定。 )决定。
’C54X的结构特点 C54X的结构特点
连接内部振荡器或外部时钟源的锁相环( 连接内部振荡器或外部时钟源的锁相环(PLL) ) 发生器 支持8-或 支持 或16-bit传送的全双工串口 传送的全双工串口 时分多路( 时分多路(TDM)串口 ) 缓冲串口( 缓冲串口(BSP) ) McBSPs串口 串口 8/16-bit并行主机接口(HPI) 并行主机接口( 并行主机接口 ) 一个16-bit定时器 一个 定时器
’C54X的结构特点 C54Fra bibliotek的结构特点可用来进行非流水单周期乘/加 可用来进行非流水单周期乘 加(MAC)运算 ) 比较、选择和存储单元( 比较、选择和存储单元(CSSU)用于 )用于Viterbi 运算器的加/比较选择 运算器的加 比较选择 指数编码器在一个周期里计算一个40-bit累加 累加 指数编码器在一个周期里计算一个 器值的指数值 两个地址发生器中有八个辅助寄存器和两个 辅助寄存器算术单元( 辅助寄存器算术单元(ARAUS) )
ST0 ST1 PMST
存储器分配: 存储器分配:
‘C54x存储器由三个独立的可选择空间 存储器由三个独立的可选择空间 组成:程序,数据和I/O空间 空间。 组成:程序,数据和 空间。所有 的’C54x芯片都包括随机访问存储器 芯片都包括随机访问存储器 (RAM)和只读存储器(ROM)。 )和只读存储器( )。 RAM又分两种:双访问RAM(DARAM) 又分两种:双访问 ( ) 又分两种 和单访问RAM(SARAM)。 和单访问 ( )。
’C54X的结构特点 C54X的结构特点
外部I/O( 外部 (XIO)关闭控制,禁止外部数 )关闭控制, 据、地址和控制信号 片内基于扫描的仿真逻辑, 片内基于扫描的仿真逻辑,JTAG边界扫 边界扫 描逻辑( 描逻辑(IEEE1149.1) ) 单周期定点指令执行时间10-25ns 单周期定点指令执行时间
‘C54x的算术逻辑单元(ALU): C54x的算术逻辑单元 ALU): 的算术逻辑单元(
使用40-bit的算术逻辑单元(ALU)和两个 的算术逻辑单元( ‘C54x/’LC54x使用 使用 的算术逻辑单元 ) 40-bit的累加器(ACCA和ACCB)来完成二进制补码的 的累加器( 的累加器 和 ) 算术运算。同时ALU也能完成布尔运算。ALU可使用以 也能完成布尔运算。 算术运算。同时 也能完成布尔运算 可使用以 下输入: 下输入: • 16-bit的立数 的立数 • 从数据存储器读出的 16-bit字 字 暂存器T中的 中的16-bit值 •从数据存储器读出的两个 • 暂存器 中的 值 从数据存储器读出的两个16-bit 字 从数据存储器读出的一个32-bit字 • 从数据存储器读出的一个 字 从其中一个累加器输出的40-bit值 • 从其中一个累加器输出的 值 能起两个16-bitALUs的作用,且在状态寄存器 的作用, • ALU能起两个 能起两个 的作用 且在状态寄存器ST1中 中 位置1时 可同时完成两个16-bit运算 的C16位置 时,可同时完成两个 位置 运算
辅助寄存器算术单元
通过使用两个辅助寄存器算术单元( ‘C54x通过使用两个辅助寄存器算术单元(ARAU0 通过使用两个辅助寄存器算术单元 ),每周期能产生两个数据存储器地址 和ARAU1),每周期能产生两个数据存储器地址。 ),每周期能产生两个数据存储器地址。 PB总线能把存储在程序空间的数据操作数(如系数表) 总线能把存储在程序空间的数据操作数( 总线能把存储在程序空间的数据操作数 如系数表) 传送到乘法器和加法器中进行乘/累加运算,或者在数 传送到乘法器和加法器中进行乘 累加运算, 累加运算 据移动指令( 据移动指令(MVPD和READA)中传送到数据空间。 和 )中传送到数据空间。 这种能力再加上双操作数读的特性,支持单周期3操作 这种能力再加上双操作数读的特性,支持单周期 操作 数指令的执行, 指令。 数指令的执行,如FIRS指令。 指令 还有一组寻址片内外设的片内双向总线, ‘C54x还有一组寻址片内外设的片内双向总线,通过 还有一组寻址片内外设的片内双向总线 CPU接口中的总线交换器与 和EB 相连接。对这组 接口中的总线交换器与DB和 相连接。 接口中的总线交换器与 总线的访问, 总线的访问,需要两个或更多的机器周期来进行读和 具体所需周期数由片内外设的结构决定。 写,具体所需周期数由片内外设的结构决定。