NC7SZ14中文资料
NC7系列 交流接触器 说明书

129
137
NC7-250
备注说明
kW
A
315
132
250
132
250
160
170
160
170
NC7-300
备注说明
kW
A
380
160
300
160
300
220 235
220 235
B
可加配附件
更多附件参数请查看第8页~第9页
顶挂辅助触头
空气延时头
机械联锁模块
热过载继电器
电子式过载继电器
B-024
接触器类
NJLc-GH NC7-205和NC7-250~300任1台组合
NJLc-GK NC7-205和NC7-410~475任1台组合
NC7-115~170 机械联锁
NJLc-GL NC7-205和NC7-620组合 NJLc-HH NC7-250~300任意两台组合
NJLc-HK NC7-250~300任1台和NC7-410~475任1台组合
型号
NC7-09 NC7-12 NC7-18 NC7-25 NC7-32 NC7-38 NC7-40 NC7-50 NC7-65 NC7-80 NC7-95
额定
AC-3 9
12
18
25
32
38
4050Leabharlann 658095
380V/400V
工作
AC-4 3.5
5
7.7
8.5
12
12
18.5
24
28
37
44
电流
电流规格
410A
475A
620A
本体不带辅助 触头可加装两 个顶挂辅助
深圳市晶科鑫实业有限公司 7N型号晶体振荡器说明书

深圳市晶科鑫实业有限公司样品承认书客户代码:物料名称:贴片钟振规格型号:5032 OSC12.288MHZ 1.8~3.3V ±30PPM CMOSP N/ SJK:7N12288G33YC承认签章供应商承认()公司承认制定审核核准工程师审核批准林雁杨霞黄灏东盖章签署盖章签署日期日期批示:□接受□有条件接受备注:公司地址:深圳市龙岗区天安云谷产业园一期3栋C座12楼1204~1206室电话:传真:Approved by: 黄灏东Checked by: 杨霞Issued by: 玉静霞产品规格书SPECIFICATIONPN / SJK: 7N12288G33YC深圳市晶科鑫实业有限公司SHENZHEN CRYSTAL TECHNOLOGY INDUSTRIAL CO., LTD.公司地址:深圳市龙岗区天安云谷产业园一期3栋C座12楼1204~1206室电话:*************-837传真:*************修改记录版次修改日项目改定内容改定者确认者A1 2015-6-5 初版林雁杨霞1. ELECTRICAL SPECIFICATIONSStandard atmospheric conditionsUnless otherwise specified, the standard range of atmospheric conditions for making measurement and tests are as follow:Ambient temperature : 25±5℃Relative humidity : 40%~70%If there is any doubt about the results, measurement shall be made within the following limits: Ambient temperature : 25±3℃Relative humidity : 40%~70%Measure equipmentElectrical characteristics measured by MD 37WX-05M or equivalen t.Crystal cutting typeThe crystal is using AT CUT (thickness shear mode).Parameters SYMElectrical Spec. Notes MIN TYPE MAX UNITS1 Nominal Frequency 12.288000 MHZ2 FrequencyStabilityAT 25℃±10 PPM Over OperatingTemperature range±20 PPM3 Operating Temperature Topr -40 25 85 ℃4 Storage Temperature Tstg -55 ~ 125 ℃5 Supply Voltage VDD 1.8~3.3 ±10% V6 Input Current Icc 5 mA7 Enable Control Yes Pad18 Output Load : CMOS CL 15 pF9 Output Voltage High VoH 90%VddV10 Output Voltage Low VoL 10%VddV11 Rise Time Tr 5 ns 10%→90%VDDLevel12 Fall Time Tf 5 ns 90%→10%VDDLevel13 Symmetry (Duty ratio) TH/T 45 ~ 55 %14 Start-up Time Tosc 10 ms15 Enable Voltage High Vhi 70%VddV16 Disable Voltage Low Vlo 30%VddV17 Aging ±3 ppm/yr. 1st. Year at 25℃18 Output Disable Delay Time T off 150 us19 Output Enable Delay Time T on 150 us20 Phase Jitter (12KHZ~20MHZ)0.5 1.0 ps2. DIMENSIONS (Units :mm)MARKING3. TEST CIRCUITControl input (output enable/disable)Logic 1 or open on pad 1: Oscillator outputLogic 0 on pad 1 : Disable output to high impedance4. PART NUMBER GUIDESJK -7N— 12288Frequency12.288MHz— GFrequencytolerance—33Supplyvoltage— Y Fan out type X:TTL/CMOS — C Temperaturerange5. WAVEFORM CONDITIONSWaveform measurement system shouldhave a min. bandwidth of 5 times thefrequency being tested.6. OUTPUT ENABLE / DISABLE DELAYThe following figure shows the oscillator timing during normal operation . Note that when the device is in standby,the oscillator stops. When standby is released, the oscillator starts and stable oscillator output occurs after a short delay7. SUGGESTED REFLOW PROFILE8. STRUCTURE ILLUSTRATIONNO COMPONENTSMATERIALS FINISH/SPECIFICATIONS1 LID Kovar (Fe/Co/Ni)2 Base(Package)Ceramic (AI2O3) + Kovar (Fe/Co/Ni)+ Ag/CuColor black 3 PAD Au Tungsten metalize+ Ni plating + Au plating4 Crystal blank SiO25 Conductive adhesiveAg Silicon resin6 Electrode Noble Metal7 IC chip8 Bonding wire Au Pad 1 options : NC is 5wires , EN is 6 wires.9. PACKING10. RELIABILITY TEST SPECIFICATION1.Mechanical EnduranceNo.Test Item Test Methods REF. DOC 1 Drop Test75 cm height,3 times on concrete floor .JIS C67012 Mechanical Shock Device are shocked to half sine wave ( 1000G ) three mutuallyperpendicular axes each 3 times. 0.5m sec.duration timeMIL-STD-202F3 VibrationFrequency range 10 ~ 2000 HzAmplitude 1.52 mm/20GSweep time 20 minutesPerpendicular axes each test time 4 Hrs(Total test time 12 Hrs)MIL-STD-883E4 Gross Leak Standard Sample For Automatic Gross LeakDetector, Test Pressure: 2kg / cm2MIL-STD-883E5 Fine Leak Helium Bomging 4.5 kgf / cm 2 for 2 Hrs6 SolderabilityTemperature 245 ℃ ± 5℃Immersing depth 0.5 mm minimumImmersion time 5 ± 1 secondsFlux Rosin resin methyl alcoholsolvent ( 1 : 4 )MIL-STD-883E2.Environmental EnduranceNo. Test Item Test Methods REF. DOC1 Resistance To SolderingHeatPre-heat temperature 125 ℃Pre-heat time 60 ~ 120 sec.Test temperature 260 ± 5 ℃Test time 10 ± 1 sec.MIL-STD-202F2 High Temp. Storage + 125 ℃ ±3 ℃ for 1000 ± 12 HrsMIL-STD-883E 3 Low Temp. Storage - 40 ℃ ± 3 ℃ for 1000 ± 12 Hrs4 Thermal Shock Total 100 cycles of the following temperaturecycleMIL-STD-883E5 Pressure CookerStorage121 ± 3℃ , RH100% , 2 bar , 240 Hrs JIS C67016 High Temp&Humidity 85℃ ± 3℃, RH 85% , 1000 Hrs JIS C5023。
Z23S2407N中文资料(AEROVOX)中文数据手册「EasyDatasheet - 矽搜」

芯片中文手册,看全文,戳
Aerovox公司 ®
SuperMet & ZeMax TM 技术指标
特征
Aerovox路线SuperMet和ZEMAX
TM 电容器
•可根据金属外壳(铝合金外壳
利用最先进金属化聚丙烯薄膜技术状态.这款最新设
请求 - 请联系工厂)SuperMet
计材料结合领先设计技术,具有40多年电容经验.
咨询厂家
电气特性
应用
• 窗式空调 • 单元式空调 • 电动汽车 • 风扇与鼓风机 • Pumps • 洗衣房设备 • 除湿机 • 压缩机 •炉
• 温度范围:-40〜+ 70℃. • 电容范围3至80μF. • 电容公差±10%. • 电压范围240至440 VAC,60赫兹. • 损耗因数0.1%以下@ 60赫兹和25℃. • 绝缘电阻1000MΩ每μF.
芯片中文手册,看全文,戳
Aerovox公司 ®
交流电动机运行电容器
ZeMax TM - 铝合金外壳
AEROMET II - 塑料盒
美国制造
SuperMet - 金属外壳
芯片中文手册,看全文,戳
Aerovox公司 ®
目录
AEROMET II规格(系列M型).......................................... .................................... 3 SuperMet & ZeMax TM 规格(系列Z型)............................................ .................. 4 部分编号系统.............................................................................................................五 AEROMET II评分表(单台容量)系列M型....................................... ........... 6 AEROMET II评分表(双功能)系列型号M ....................................... ............. 8 SuperMet评分表(单台容量)系列Z型........................................ ............... 9 SuperMet评分表(双容量)系列Z型........................................ .............. 11 ZeMax TM 评分表(单台容量)系列Z型......................................... ........... 13 AEROMET II机械尺寸.............................................. .......................................... 15 SuperMet机械尺寸............................................... ........................................... 16 ZeMax TM 机械Dimensions............................................................................................17 附件 - 安装硬件.............................................. ............................................ 18
XR21V1414评估板用户手册说明书

1.0INTRODUCTIONThis user’s manual is for the XR21V1414 evaluation board. It will describe the hardware setup required to operate the part.2.0OVERVIEWThe XR21V1414 evaluation board has one 48-TQFP package on it. Figure 1 shows a top view of XR21V1414 evaluation board F IGURE 1. T OP V IEW OF XR21V1414 E VALUATION BOARD L AYOUTlayout.Figure 2 shows a bottom view of XR21V1414 evaluation board layout.F IGURE 2. B OTTOM V IEW OF XR21V1414 E VALUATION B OARD L AYOUT2.1Evaluation Board ComponentsTable 1 below lists some of the components installed on the evaluation boards. The default setting is RS-232 mode.T ABLE 1: C OMPONENTS O F T HE XR21V1414 E VALUATION B OARDU NIT L OCATION P ART F UNCTIONU1Top XRP6657IHBTR-F-DFN6Exar’s voltage converter to step down voltage from 5V to3.3V.U2 Top AT24C02B-PU-DIP8I2C EEPROM.U3Top XR21V1414IM48Exar’s 4 channel USB UART.U4Bottom NC7SZ14M5X-SOT-23-5Invert LowPower (suspend) signal.U5Bottom SN74LVC2G53DCTR-SM8Switch UART TXA signal into either RS-232 or RS-485transceiver.U6Bottom SN74LVC2G53DCTR-SM8Switch UART TXB signal into either RS-232 or RS-485transceiver.U7Bottom SN74LVC2G53DCTR-SM8Switch RXA signal from either RS-232 or RS-485 trans-ceiver.U8Bottom SN74LVC2G53DCTR-SM8Switch RXB signal from either RS-232 or RS-485 trans-ceiver.U9Bottom SN74LVC2G53DCTR-SM8Switch UART TXC signal into either RS-232 or RS-485transceiver.U10Bottom SN74LVC2G53DCTR-SM8Switch UART TXD signal into either RS-232 or RS-485transceiver.U11Bottom SN74LVC2G53DCTR-SM8Switch RXC signal from either RS-232 or RS-485 trans-ceiver.U12Bottom SN74LVC2G53DCTR-SM8Switch RXD signal from either RS-232 or RS-485 trans-ceiver.U13Top SP3245EEY-L-TSSOP-28Exar’s RS-232 transceiver for channel A.U14Top SP3245EEY-L-TSSOP-28Exar’s RS-232 transceiver for channel B.U15Top SP3245EEY-L-TSSOP-28Exar’s RS-232 transceiver for channel C.U16Top SP3245EEY-L-TSSOP-28Exar’s RS-232 transceiver for channel D.U17Bottom SN74LVC2G66DCT-SM8Mutiplexer to select RS-485 direction control signal(RTSA# or DTRA#).U18Top SP3497EEN-L-NSOIC14Exar’s RS-485 transceiver for channel A.U19Bottom SN74LVC2G66DCT-SM8Mutiplexer to select RS-485 direction control signal(RTSB# or DTRB#).U20Top SP3497EEN-L-NSOIC14Exar’s RS-485 transceiver for channel B.U21Bottom SN74LVC2G66DCT-SM8Mutiplexer to select RS-485 direction control signal(RTSC# or DTRC#).U22Top SP3497EEN-L-NSOIC14Exar’s RS-485 transceiver for channel C.U23Bottom SN74LVC2G66DCT-SM8Mutiplexer to select RS-485 direction control signal(RTSD# or DTRD#).N OTES :1) An external pull-up is required on the LOWPOWER pin for proper functionality. The external pull-up is not shown in the evaluation board schematics, but has been added on the evaluation board. 2) An external pull-up is required on any GPIO pins that is used as an input. In the suspend mode, the internal pull-up resistor is disabled and the input will be floating if there is no external pull-up resistor. The external pull-ups have not been added to the GPIOs used as inputs on this evaluation board.U24Top SP3497EEN-L-NSOIC14Exar’s RS-485 transceiver for channel D.CON1Top PJ-002A External power input.CON2Top690-004-621-023USB B-Type connector. Communication with USB host (USBD+, USBD-) and power source for evaluation board (V Bus ).CON3Top 182-009-113R161RS-232 mode DB9 male connector for channel A.CON4Top 182-009-113R161RS-232 mode DB9 male connector for channel B.CON5Top 182-009-113R161RS-232 mode DB9 male connector for channel C.CON6Top 182-009-113R161RS-232 mode DB9 male connector for channel D.CON7Top ED555/4DS RS-485 mode 4X1 terminal block for channel A.CON8Top ED555/4DS RS-485 mode 4X1 terminal block for channel B.CON9Top ED555/4DS RS-485 mode 4X1 terminal block for channel C.CON10TopED555/4DSRS-485 mode 4X1 terminal block for channel D.T ABLE 1: C OMPONENTS O F T HE XR21V1414 E VALUATION B OARDU NIT L OCATIONP ARTF UNCTION2.2Jumper Settings2.2.1Common jumpersCommon jumpers are those jumpers which should be set the same for both RS-232 and RS-485 mode. The Table 2 shows the common jumpers setting on the evaluation board:T ABLE 2: C OMMON J UMPERS S ETTINGSJ UMPERS L OCATION F UNCTIONS C OMMENTSJP1Top Power source select Not installed. Trace between pin 2&3.■Jumper in 1&2 selects power from external powersupply of 5V■Jumper in 2&3 selects power from USB V BUSpowerJP2Top SCL pull-up/pull-down resistor select Jumper in 1&2 selects pull-up for SCLJumper in 2&3 selects pull-down for SCL JP3Top SDA pull-up/pull-down resistor select Jumper in 1&2 selects pull-up for SDAJumper in 2&3 selects pull-down for SDA JP4Top I2C EEPROM header Jumper in 1&2 connects SCL to I2C EEPROMJumper in 3&4 connects SDA to I2C EEPROMN OTE: I2C EEPROM has not been programmedJP5Top Selects RS-232 or RS-485 mode forChannel A Jumper in 1&2 selects RS-485 mode Jumper in 2&3 selects RS-232 mode (default)JP6Top Selects RS-232 or RS-485 mode forChannel B Jumper in 1&2 selects RS-485 mode Jumper in 2&3 selects RS-232 mode (default)JP7Top Selects RS-232 or RS-485 mode forChannel C Jumper in 1&2 selects RS-485 mode Jumper in 2&3 selects RS-232 mode (default)JP8Top Selects RS-232 or RS-485 mode forChannel D Jumper in 1&2 selects RS-485 mode Jumper in 2&3 selects RS-232 mode (default)JP25Top Power supply for XR21V1414Not installed. Trace between pin 1&2JP26Top UART side Channel A external loop-back header Jumper in enables external loopback for channel A in the UART sideN OTE: External loopback via this jumper can only be performed when the transceiver has beendisabled.JP27Top UART side Channel B external loop-back header Jumper in enables external loopback for channel B in the UART sideN OTE: External loopback via this jumper can only be performed when the transceiver has beendisabled.2.2.2Remote wakeup and jumperThe SDA and SCL are used to specify whether Remote Wakeup and/or Bus Powered configurations are to be supported. These pins are sampled at power-up. The following Table 3 describes how Remote Wakeup and Bus Powered support.T ABLE 3: R EMOTE W AKEUP AND P OWER M ODESR EMOTE W AKE -UPS UPPORTP OWER M ODE C OMMENTS11No Self-Powered Default, if no EEPROM is present10No Bus-Powered 01Yes Self-Powered 0YesBus-PoweredThe following Table 4 shows jumpers related to remote wakeup.T ABLE 4: R EMOTE W AKEUP J UMPERS S ETTINGSJ UMPERS L OCATIONF UNCTIONSC OMMENTSJP38TopSelect remote control wakeup signal for Channel A Jumper in 1&2 selects UART RS-232 transceiver (RI#) signalJumper in 2&3 selects push-button SW1TopGenerate remote wakeup signalPush once to generate one remote wakeup signalJP28TopUART side Channel C external loop-back headerJumper in enables external loopback for channel C in the UART sideN OTE : External loopback via this jumper can only beperformed when the transceiver has been disabled.JP29TopUART side Channel D external loop-back headerJumper in enables external loopback for channel D in the UART sideN OTE : External loopback via this jumper can only beperformed when the transceiver has been disabled.SDA SCL T ABLE 2: C OMMON J UMPERS S ETTINGSJ UMPERS L OCATIONF UNCTIONSC OMMENTS2.2.3RS-232 mode jumpers (Default setting is RS-232 mode)The XR21V1414 evaluation board is set in RS-232 mode by default. The following Table 5 jumper settings apply to the RS-232 mode:T ABLE 5: J UMPER S ETTINGS F OR RS-232 M ODEJ UMPERS L OCATION F UNCTIONS C OMMENTSJP30Top Power supply for RS-232 transceiver ofChannel ANot installed. Trace between pin 1&2JP31Top Power supply for RS-232 transceiver ofChannel BNot installed. Trace between pin 1&2JP32Top Power supply for RS-232 transceiver ofChannel CNot installed. Trace between pin 1&2JP33Top Power supply for RS-232 transceiver ofChannel DNot installed. Trace between pin 1&22.2.4RS-485 mode jumpersThe following Table 6 jumper setting applies to the RS-485 mode:T ABLE 6: J UMPER S ETTINGS F OR RS-485 M ODEJ UMPERS L OCATION F UNCTIONS C OMMENTSJP34Top Power supply for RS-485 transceiver ofChannel ANot installed. Trace between pin 1&2JP9Top Select Channel A RTS or DTR directioncontrol for TX Jumper in 1&2 selects RTS based direction control for TXJumper in 2&3 selects DTR based direction control for TXJP10Top Select Channel A direction control for RXand TX or always for RX Jumper in 1&2 selects common direction control for RX and TXJumper in 2&3 enables RX alwaysJP11Top Channel select for half duplex or fullduplex mode Jumper in 1&2 selects for half duplex mode Jumper in 2&3 selects for full duplex modeJP12Top Channel select for half duplex or fullduplex mode Jumper in 1&2 selects for half duplex mode Jumper in 2&3 selects for full duplex modeJP35Top Power supply for RS-485 transceiver ofChannel BNot installed. Trace between pin 1&2JP13Top Select Channel B RTS or DTR directioncontrol for TX Jumper in 1&2 selects RTS based direction control for TXJumper in 2&3 selects DTR based direction control for TXJP14Top Select Channel B direction control for RXand TX or always for RX Jumper in 1&2 selects common direction control for RX and TXJumper in 2&3 selects common direction control for RX alwaysJP15Top Channel B select for half duplex or fullduplex mode Jumper in 1&2 selects for half duplex mode Jumper in 2&3 selects for full duplex mode3.0DRIVERS AND SUPPORTFor any questions about this evaluation board, software drivers or technical support, send an e-mail to ************************.JP16Top Channel B select for half duplex or full duplex modeJumper in 1&2 selects for half duplex mode Jumper in 2&3 selects for full duplex mode JP36Top Power supply for RS-485 transceiver of Channel CNot installed. Trace between pin 1&2JP17TopSelect Channel C RTS or DTR direction control for TXJumper in 1&2 selects RTS based direction control for TXJumper in 2&3 selects DTR based direction control for TXJP18TopSelect Channel C direction control for RX and TX or always for RX Jumper in 1&2 selects common direction control for RX and TXJumper in 2&3 selects common direction control for RX always JP19Top Channel C select for half duplex or full duplex modeJumper in 1&2 selects for half duplex mode Jumper in 2&3 selects for full duplex mode JP20Top Channel C select for half duplex or full duplex modeJumper in 1&2 selects for half duplex mode Jumper in 2&3 selects for full duplex mode JP37Top Power supply for RS-485 transceiver of Channel DNot installed. Trace between pin 1&2JP21TopSelect Channel D RTS or DTR direction control for TXJumper in 1&2 selects RTS based direction control for TXJumper in 2&3 selects DTR based direction control for TXJP22TopSelect Channel D direction control for RX and TX or always for RX Jumper in 1&2 selects common direction control for RX and TXJumper in 2&3 selects common direction control for RX always JP23Top Channel D select for half duplex or full duplex modeJumper in 1&2 selects for half duplex mode Jumper in 2&3 selects for full duplex mode JP24TopChannel D select for half duplex or full duplex modeJumper in 1&2 selects for half duplex mode Jumper in 2&3 selects for full duplex modeT ABLE 6: J UMPER S ETTINGS F OR RS-485 M ODEJ UMPERS L OCATIONF UNCTIONSC OMMENTSNOTICEEXAR Corporation reserves the right to make changes to the products contained in this publication in order to improve design, performance or reliability. EXAR Corporation assumes no responsibility for the use of any circuits described herein, conveys no license under any patent or other right, and makes no representation that the circuits are free of patent infringement. Charts and schedules contained here in are only for illustration purposes and may vary depending upon a user’s specific application. While the information in this publication has been carefully checked; no responsibility, however, is assumed for inaccuracies.EXAR Corporation does not recommend the use of any of its products in life support applications where the failure or malfunction of the product can reasonably be expected to cause failure of the life support system or to significantly affect its safety or effectiveness. Products are not authorized for use in such applications unless EXAR Corporation receives, in writing, assurances to its satisfaction that: (a) the risk of injury or damage has been minimized; (b) the user assumes all such risks; (c) potential liability of EXAR Corporation is adequately protected under the circumstances.Copyright 2009 EXAR CorporationDatasheet July 2009.Send your UART technical inquiry with technical details to hotline: ************************. Reproduction, in part or whole, without the prior written consent of EXAR Corporation is prohibited.。
SN74LS14N3中文资料
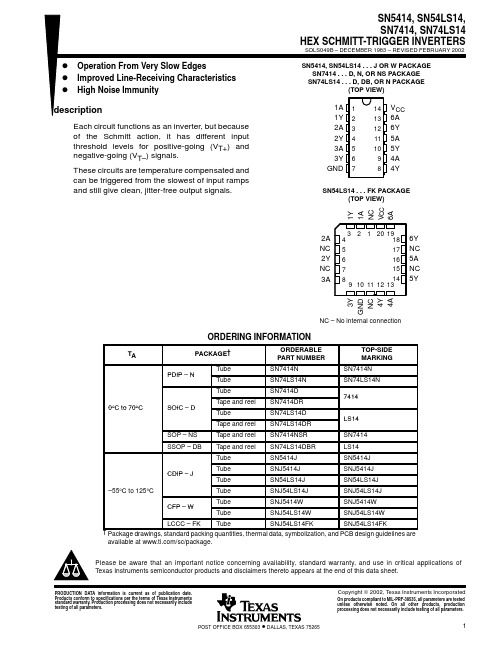
InputV T OutputPACKAGING INFORMATIONOrderable Device Status(1)PackageType PackageDrawingPins PackageQtyEco Plan(2)Lead/Ball Finish MSL Peak Temp(3)5962-9665801Q2A ACTIVE LCCC FK201TBD Call TI Level-NC-NC-NC 5962-9665801QCA ACTIVE CDIP J141TBD Call TI Level-NC-NC-NC 5962-9665801QDA ACTIVE CFP W141TBD Call TI Level-NC-NC-NC 5962-9665801VCA ACTIVE CDIP J141TBD Call TI Level-NC-NC-NC 5962-9665801VDA ACTIVE CFP W141TBD Call TI Level-NC-NC-NC JM38510/31302BCA ACTIVE CDIP J141TBD Call TI Level-NC-NC-NC SN5414J ACTIVE CDIP J141TBD Call TI Level-NC-NC-NC SN54LS14J ACTIVE CDIP J141TBD Call TI Level-NC-NC-NCSN7414D ACTIVE SOIC D1450Pb-Free(RoHS)CU NIPDAU Level-2-260C-1YEAR/Level-1-235C-UNLIMSN7414DE4ACTIVE SOIC D1450Pb-Free(RoHS)CU NIPDAU Level-2-260C-1YEAR/Level-1-235C-UNLIMSN7414DR ACTIVE SOIC D142500Pb-Free(RoHS)CU NIPDAU Level-2-260C-1YEAR/Level-1-235C-UNLIMSN7414DRE4ACTIVE SOIC D142500Pb-Free(RoHS)CU NIPDAU Level-2-260C-1YEAR/Level-1-235C-UNLIMSN7414N ACTIVE PDIP N1425Pb-Free(RoHS)CU NIPDAU Level-NC-NC-NC SN7414N3OBSOLETE PDIP N14TBD Call TI Call TISN7414NSR ACTIVE SO NS142000Pb-Free(RoHS)CU NIPDAU Level-2-260C-1YEAR/Level-1-235C-UNLIMSN7414NSRE4ACTIVE SO NS142000Pb-Free(RoHS)CU NIPDAU Level-2-260C-1YEAR/Level-1-235C-UNLIMSN74LS14D ACTIVE SOIC D1450Pb-Free(RoHS)CU NIPDAU Level-2-260C-1YEAR/Level-1-235C-UNLIMSN74LS14DBR ACTIVE SSOP DB142000Pb-Free(RoHS)CU NIPDAU Level-2-260C-1YEAR/Level-1-235C-UNLIMSN74LS14DBRE4ACTIVE SSOP DB142000Pb-Free(RoHS)CU NIPDAU Level-2-260C-1YEAR/Level-1-235C-UNLIMSN74LS14DR ACTIVE SOIC D142500Pb-Free(RoHS)CU NIPDAU Level-2-260C-1YEAR/Level-1-235C-UNLIMSN74LS14N ACTIVE PDIP N1425Pb-Free(RoHS)CU NIPDAU Level-NC-NC-NC SN74LS14N3OBSOLETE PDIP N14TBD Call TI Call TISN74LS14NE4ACTIVE PDIP N1425TBD Call TI Call TISN74LS14NSRG4ACTIVE SO NS142000Green(RoHS&no Sb/Br)CU NIPDAU Level-1-260C-UNLIM SNJ5414J ACTIVE CDIP J141TBD Call TI Level-NC-NC-NCSNJ5414W ACTIVE CFP W141TBD Call TI Level-NC-NC-NC SNJ54LS14FK ACTIVE LCCC FK201TBD Call TI Level-NC-NC-NC SNJ54LS14J ACTIVE CDIP J141TBD Call TI Level-NC-NC-NC SNJ54LS14W ACTIVE CFP W141TBD Call TI Level-NC-NC-NC (1)The marketing status values are defined as follows:ACTIVE:Product device recommended for new designs.LIFEBUY:TI has announced that the device will be discontinued,and a lifetime-buy period is in effect.NRND:Not recommended for new designs.Device is in production to support existing customers,but TI does not recommend using this part in a new design.PREVIEW:Device has been announced but is not in production.Samples may or may not be available.OBSOLETE:TI has discontinued the production of the device.(2)Eco Plan-The planned eco-friendly classification:Pb-Free(RoHS)or Green(RoHS&no Sb/Br)-please check /productcontent for the latest availability information and additional product content details.TBD:The Pb-Free/Green conversion plan has not been defined.Pb-Free(RoHS):TI's terms"Lead-Free"or"Pb-Free"mean semiconductor products that are compatible with the current RoHS requirements for all6substances,including the requirement that lead not exceed0.1%by weight in homogeneous materials.Where designed to be soldered at high temperatures,TI Pb-Free products are suitable for use in specified lead-free processes.Green(RoHS&no Sb/Br):TI defines"Green"to mean Pb-Free(RoHS compatible),and free of Bromine(Br)and Antimony(Sb)based flame retardants(Br or Sb do not exceed0.1%by weight in homogeneous material)(3)MSL,Peak Temp.--The Moisture Sensitivity Level rating according to the JEDEC industry standard classifications,and peak solder temperature.Important Information and Disclaimer:The information provided on this page represents TI's knowledge and belief as of the date that it is provided.TI bases its knowledge and belief on information provided by third parties,and makes no representation or warranty as to the accuracy of such information.Efforts are underway to better integrate information from third parties.TI has taken and continues to take reasonable steps to provide representative and accurate information but may not have conducted destructive testing or chemical analysis on incoming materials and chemicals.TI and TI suppliers consider certain information to be proprietary,and thus CAS numbers and other limited information may not be available for release.In no event shall TI's liability arising out of such information exceed the total purchase price of the TI part(s)at issue in this document sold by TI to Customer on an annual basis.元器件交易网IMPORTANT NOTICETexas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications,enhancements, improvements, and other changes to its products and services at any time and to discontinueany product or service without notice. Customers should obtain the latest relevant information before placingorders and should verify that such information is current and complete. All products are sold subject to TI’s termsand conditions of sale supplied at the time of order acknowledgment.TI warrants performance of its hardware products to the specifications applicable at the time of sale inaccordance with TI’s standard warranty. T esting and other quality control techniques are used to the extent TIdeems necessary to support this warranty. Except where mandated by government requirements, testing of allparameters of each product is not necessarily performed.TI assumes no liability for applications assistance or customer product design. Customers are responsible fortheir products and applications using TI components. T o minimize the risks associated with customer productsand applications, customers should provide adequate design and operating safeguards.TI does not warrant or represent that any license, either express or implied, is granted under any TI patent right,copyright, mask work right, or other TI intellectual property right relating to any combination, machine, or processin which TI products or services are used. Information published by TI regarding third-party products or servicesdoes not constitute a license from TI to use such products or services or a warranty or endorsement thereof.Use of such information may require a license from a third party under the patents or other intellectual propertyof the third party, or a license from TI under the patents or other intellectual property of TI.Reproduction of information in TI data books or data sheets is permissible only if reproduction is withoutalteration and is accompanied by all associated warranties, conditions, limitations, and notices. Reproductionof this information with alteration is an unfair and deceptive business practice. TI is not responsible or liable forsuch altered documentation.Resale of TI products or services with statements different from or beyond the parameters stated by TI for thatproduct or service voids all express and any implied warranties for the associated TI product or service andis an unfair and deceptive business practice. TI is not responsible or liable for any such statements.Following are URLs where you can obtain information on other Texas Instruments products and applicationsolutions:Products ApplicationsAmplifiers Audio /audioData Converters Automotive /automotiveDSP Broadband /broadbandInterface Digital Control /digitalcontrolLogic Military /militaryPower Mgmt Optical Networking /opticalnetworkMicrocontrollers Security /securityTelephony /telephonyVideo & Imaging /videoWireless /wirelessMailing Address:Texas InstrumentsPost Office Box 655303 Dallas, Texas 75265Copyright 2005, Texas Instruments Incorporated。
NC7SZ04M5X中文资料

Features
s Space saving SOT23 or SC70 5-lead package s Ultra High Speed; tPD 2.4 ns typ into 50 pF at 5V VCC s High Output Drive; ±24 mA at 3V VCC s Broad VCC Operating Range; 1.8V to 5.5V s Matches the performance of LCX when operated at 3.3V VCC s Power down high impedance inputs/output s Overvoltage tolerant inputs facilitate 5V to 3V translation s Patented noise/EMI reduction circuitry implemented
Logic ol
IEEE/IEC
Connection Diagram
(Top View)
Pin Descriptions
Pin Names A Y NC Description Input Output No Connect
Function Table
Y=A Input A L H
H = HIGH Logic Level L = LOW Logic Level
Note 3: CPD is defined as the value of the internal equivalent capacitance which is derived from dynamic operating current consumption (ICCD) at no output loading and operating at 50% duty cycle. (See Figure 2.) CPD is related to ICCD dynamic operating current by the expression: ICCD = (CPD) (V CC) (fIN) + (ICC static)
正泰双电源自动转换开关使用说明及接线图

NZ7系列双电源说明书1、适用范围NZ7系列自动转换开关电器适用于交流工频50Hz,额定工作电压AC400V,额定工作电流至630A的三相四线双路供电电网中,自动将一个或几个负载电路从一个电源接至另一个电源,以保证负载电路的正常供电。
本产品适用于工业、商业、高层和民用住宅等较为重要的场所。
执行标准:GB/T 14048.11。
2、型号及含义3、正常工作条件3.1 周围空气温度周围空气温度上限为+40℃,下限为-5℃,且24h内平均温度不超过+35℃;3.2 海拔安装地点的海拔不超过2000m;3.3 大气条件大气的相对湿度在周围最高温度+40℃时不超过50%,在较低的温度下可以有较高的相对湿度,例如+20℃时达到90%,对于温度变化偶尔产生的凝露,应采取特殊的措施。
3.4 污染等级污染等级为3级。
4、技术参数及性能5、特性及功能NZ7系列自动转换开关电器(以下简称自动转换开关)是结合先进的数字电子控制技术的新一代CB级产品。
产品具有体积小、节能、安装方便、功能先进齐全、可靠双重联锁保护等特点。
5.1 体积小单电机传动结构,利用电机正反旋转,实现转换功能,同时使产品高度降低,减小了安装空间。
5.2 节能驱动机构采用电动机传动方式,功耗小,噪音小。
5.3 功能先进齐全5.4 双重联锁保护采用机械联锁和电气联锁双重保护,防止两路电源同时接通;其中电气联锁采用直接指示自动转换开关的断路器触头位置方式,实现真正意义的电气联锁——防止触头熔焊、断路器手柄损坏、电路故障断路器脱扣等情况下发生自动转换。
6、控制器6.1 A型控制器集成一体分体模式,安装于柜内或柜体面板,可进行柜外操作。
根据工作电源状态,决定是否从一个电源转换到另一个电源。
发动机组的控制按键式手动强制转换动作6.2控制电压AC230V 50Hz6.3操作:自动操作、手动操作6.4 设定延时转换延时:0180s连续可调~返回延时:0180s连续可调~6.5 显示和操作界面LED数码管显示a.自动工作模式指示;b.手动工作模式指示;c.故障指示当开关出现故障或负载短路引起断路器跳闸后时此指示亮;d.常用电源电压参数显示区在工作状态时显示常用电源电压参数及转换延时时间,在设置状态下显示设置项目符号;e.常用电源侧电源断路器闭合、断开指示;f.设置状态指示;g.备用电源侧电源断路器闭合、断开指示;h.消防联动功能启动指示;i.常用电源侧电压、时间、频率单位;j.A、B、C相位;k.备用电源侧电压、时间、频率单位;l.备用电源电压参数显示区在工作状态时显示备用电源电压参数及转换延时时间,在设置状态下显示设置项目参数m.发动机启动信号指示n.自动、手动转换方式选择按钮在正常使用时用作自动、手动转换方式选择,在设置状态下为保存并退出功能。
NC7SZ125

−0.5V to +6V −0.5V to +6V −0.5V to +6V −50 mA +20 mA −50 mA +20 mA ± 50 mA ± 50 mA −65°C to +150 °C
150 °C
Recommended Operating Conditions (Note 2)
Supply Voltage Operating (VCC) Supply Voltage Data Retention (VCC) Input Voltage (VIN) Output Voltage (VOUT) Active State 3-STATE Operating Temperature (TA) Input Rise and Fall Time (tr, tf) VCC = 1.8V, 2.5V ± 0.2V VCC = 3.3V ± 0.3V VCC = 5.0V ± 0.5V Thermal Resistance (θJA) SOT23-5 SC70-5 300°C/W 425°C/W 0 ns/V to 20 ns/V 0 ns/V to 10 ns/V 0 ns/V to 5 ns/V 0V to VCC 0V to 5.5V 1.65V to 5.5V 1.5V to 5.5V 0V to 5.5V
(Top Thru View)
TinyLogic and MicroPak are trademarks of Fairchild Semiconductor Corporation.
© 2002 Fairchild Semiconductor Corporation
DS012161
DC Electrical Characteristics
NC7SZ74K8中文资料

NC7SZ74K8X MAB08A NC7SZ74L8X MAC08A
Pb-Free package per JEDEC J-STD-020B.
TinyLogic is a registered trademark of Fairchild Semiconductor Corporation. MicroPak is a trademark of Fairchild Semiconductor Corporation.
DC Electrical Characteristics
Symbol VIH VIL VOH Parameter HIGH Level Control Input Voltage LOW Level Control Input Voltage HIGH Level Control Output Voltage VCC (V) 2.3 to 5.5 1.65 to 1.95 2.3 to 5.5 1.65 2.3 3.0 4.5 1.65 2.3 3.0 3.0 4.5 VOL LOW Level Control Output Voltage 1.65 2.3 3.0 4.5 1.65 2.3 3.0 3.0 4.5 IIN IOFF ICC Input Leakage Current Power Off Leakage Current Quiescent Supply Current 0 to 5.5 0.0 1.65 to 5.5 0.08 0.10 0.15 0.22 0.22 1.55 2.2 2.9 4.4 1.29 1.9 2.4 2.3 3.8 1.65 2.3 3.0 4.5 1.52 2.15 2.8 2.68 4.2 0.1 0.1 0.1 0.1 0.24 0.3 0.4 0.55 0.55 ±0.1 1.0 1.0 Min 0.75 VCC 0.25 VCC 0.3 VCC 1.55 2.2 2.9 4.4 1.29 1.9 2.4 2.3 3.8 0.1 0.1 0.1 0.1 0.24 0.3 0.4 0.55 0.55 ±1.0 10 10.0 µA µA µA 0 ≤ VIN ≤ 5.5V VIN or VOUT = 5.5V VIN = 5.5V, GND V VIN = VIH IOL = 4 mA IOL = 8 mA IOL = 16 mA IOL = 24 mA IOL = 32 mA IOL = 100 µA V VIN = VIH IOH = −4 mA IOH = −8 mA IOH = −16 mA IOH = −24 mA IOH = −32 mA IOH = −100 µA 1.65 to 1.95 0.75 VCC TA = +25°C Typ Max TA = −40°C to +85°C Min 0.75 VCC 0.7 VCC 0.25 VCC 0.3 VCC Max Units V V Conditions
4.正泰控制产品介绍知识讲稿

接触器
三、交流接触器介绍 NC1系列
1、概述 NC1交流接触器主要用于交流交流50Hz/60Hz,额定电压至660V,在AC-3
使用类别下额定电流至95A的电路中,供远距离接通和分断线路之用,并可于 适当的热继电器组成电磁起动器,控制电动机的起动、停止等。
接触器
2.型号含义
N C 1 -□ □ □ □
NC7 9~620A
替代LC1-E
NC8 06M~500A、06M~38/Z
NC1
9~95A、 9~95Z
NC2
115~800A、115~400Z 500、800A无4极
NC6 6~9
接触器
CKJ5 125~630
CJ12 100~600A
CJ12Z
CZ0 40~600A 40C、40CA瞬时操作
3TB40 3TB41 3TB42 3TB43 3TB44
—
3TB46 3TB47 3TB48
—
3TB50
CJX1-9
CJX1-12
Hale Waihona Puke CJX1-16CJX1-22
CJX1-32
(CJX145)
CJX1-45
CJX1-63
CJX1-75
CJX1-85
CJX1110
3TF51 3TF52 3TF53 3TF54 3TF55 3TF56 3TF57 3TF68 3TF69
接触器
空气延时头
机械联锁机构
延时接触器 可逆接触器
接触器
热继电器 限流触头组
空气延时头 辅助触头组
磁力起动器 切换电容接触器
星三角起动器
接触器
1)额定工作电压至660V。 2)产品标称电流指380V额定工作电压下AC-3工作制的额定工作电流,
TC7SZ14F中文资料

Unit Marking
V
Type name
V
V
JA
mA
mA
mA
mA Pin Assignment (top view)
mW
°C
NC 1
°C
5 VCC
IN A 2
GND 3
4 OUT Y
1
2002-04-01
元器件交易网 Logic Diagram
IN A
Truth Table
4.5 1.65
¾
0
0.1
¾
0.1
¾ 0.08 0.24 ¾ 0.24
IOL = 8 mA
2.3
¾
0.1
0.3
¾
0.3
IOL = 16 mA 3.0
¾ 0.15 0.4
¾
0.4
IOL = 24 mA 3.0
¾ 0.22 0.55 ¾ 0.55
IOL = 32 mA 4.5
¾ 0.22 0.55 ¾ 0.55
· The TOSHIBA products listed in this document are intended for usage in general electronics applications (computer, personal equipment, office equipment, measuring equipment, industrial robotics, domestic appliances, etc.). These TOSHIBA products are neither intended nor warranted for usage in equipment that requires extraordinarily high quality and/or reliability or a malfunction or failure of which may cause loss of human life or bodily injury (“Unintended Usage”). Unintended Usage include atomic energy control instruments, airplane or spaceship instruments, transportation instruments, traffic signal instruments, combustion control instruments, medical instruments, all types of safety devices, etc.. Unintended Usage of TOSHIBA products listed in this document shall be made at the customer’s own risk.
NC7SZ18P6X;NC7SZ18L6X;NC7SZ18FHX;中文规格书,Datasheet资料

Ultra-High Speed: tPD 2.5ns Typical at 5V VCC High Impedance Output when Deselected Broad VCC Operating Range: 1.65V to 5.50V Power Down High Impedance Inputs/Outputs Over-Voltage Tolerance Inputs Facilitate 5V to 3V Translation Proprietary Noise/EMI Reduction Circuitry Ultra-Small MicroPak™ Packages
Condition Min.
TA=+25°C Typ. Max.
TA=-40 to +85°C Min.
0.75VCC 0.70VCC
Unit
Max.
V 0.25VCC 0.30VCC V
VIH VIL
0.75VCC 0.70VCC 0.25VCC 0.30VCC 1.55 VIN=VIH, IOH=-100µA 2.20 2.90 4.40 IOH=-4mA IOH=-8mA IOH=-16mA IOH=-24mA IOH=-32mA 1.29 1.90 2.40 2.30 3.80 1.65 2.30 3.00 4.50 1.52 2.15 2.80 3.68 4.20 0.00 VIN=VIL IOL=100µA 0.00 0.00 0.00 IOL=4mA IOL=8mA IOL=16mA IOL=24mA IOL=32mA VIN=5.5V, GND VIN=VIL or VOH 0<VOUT 5.5V VIN or VOUT=5.5V 0.08 0.10 0.15 0.22 0.22 0.10 0.10 0.10 0.10 0.24 0.30 0.40 0.55 0.55 ±0.1 ±0.5 1 1
NC7SZ157

®TinyLogic UHS 2-Input Non-Inverting MultiplexerFeaturesBroad V CC Operating Range: 1.65V to 5.5VUltra High-SpeedPower Down High-Impedance Inputs/OutputsOver-Voltage Tolerance Inputs Facilitate 5V to 3V TranslationProprietary Noise/EMI Reduction CircuitryUltra-Small MicroPak™ PackagesSpace-Saving SC70 Package DescriptionThe NC7SZ157 is a single, high performance, 2-to-1 CMOS non-inverting multiplexer from Fairchild’s Ultra-High Speed series of TinyLogic®. The device is fabricated with advanced CMOS technology to achieve ultra high speed with high output drive while maintaining low static power dissipation over a broad V CC operating range. The device is specified to operate over the 1.65V to 5.5V V CC operating range. The inputs and outputs are high impedance when V CC is 0V. Inputs tolerate voltages up to 5.5V independent of V CC operating range.Ordering InformationPart Number Top Mark EcoStatus Package PackingMethodNC7SZ157P6X ZF7 RoHS 6-Lead SC70, EIAJ SC-88, 1.25mm Wide 3000 Units on Tape & ReelNC7SZ157L6X B9 RoHS 6-Lead MicroPak™, 1.00mm Wide 5000 Units on Tape & ReelNC7SZ157FHX B9 Green 6-Lead, MicroPak2, 1x1mm Body, .35mm Pitch 5000 Units on Tape & ReelFor Fairchild’s definition of Eco Status, please visit: /company/green/rohs_green.html.NC7SZ157 — TinyLogic ® UHS 2-Input Non-Inverting MultiplexerFigure 1. Logic SymbolPin ConfigurationsFigure 2. SC70 (Top View)Figure 3. MicroPak™ (Top Through View)Figure 4. Pin 1 OrientationNotes:1. AAA represents product code top mark (see Ordering Information ).2. Orientation of top mark determines pin one location.3. Reading the top mark left to right, pin one is the lower left pin.Pin DefinitionsPin # SC70Pin # MicroPakNameDescription1 1 I 1 Data Input2 2 GND Ground3 3 I 0 Data Input4 4 Z Output5 5 V CC Supply Voltage6 6 S Control InputFunction TableNC7SZ157 — TinyLogic ® UHS 2-Input Non-Inverting MultiplexerSymbol Parameter Min. Max. UnitV CC Supply Voltage -0.5 7.0 V V IN DC Input Voltage -0.5 7.0 V V OUT DC Output Voltage -0.57.0 V I IK DC Input Diode Current V IN ≤ 0.5V -50 mA I OK DC Output Diode Current V OUT ≤ -0.5V-50 mA I OUT DC Output Current±50 mA I CC or I GND DC V CC or Ground Current±50 mA T STG Storage Temperature Range -65 +150 °C T J Junction Temperature Under Bias+150 °C T L Junction Lead Temperature (Soldering, 10 Seconds)+260°CP DPower Dissipation at +85°CSC70-6 180 mW MicroPak-6 130 MicroPak2-6 120ESD Human Body Model, JEDEC:JESD22-A114 4000 VCharge Device Model, JEDEC:JESD22-C1012000Recommended Operating ConditionsThe Recommended Operating Conditions table defines the conditions for actual device operation. Recommended operating conditions are specified to ensure optimal performance to the datasheet specifications. Fairchild does not recommend exceeding them or designing to Absolute Maximum Ratings.Symbol ParameterConditions Min. Max. UnitV CCSupply Voltage Operating1.655.50VSupply Voltage Data Retention1.50 5.50 V IN Input Voltage 0 5.5 V V OUT Output Voltage0 V CC V T A Operating Temperature-40+85 °Ct r , t f Input Rise and Fall TimesV CC at 1.8V ± 0.15V, 2.5V ± 0.2V0 20 ns/VV CC at 3.3V ± 0.3V 0 10 V at 5.0V ± 0.5V5® UHS 2-Input Non-Inverting MultiplexerV OHHIGH LevelOutput VoltageV IN =V IL or V IH I OH = -100µAV2.30 2.20 2.30 2.203.00 2.90 3.00 2.904.50 4.40 4.50 4.401.65V IN =V ILor V IHI OH = -4mA1.29 1.52 1.292.30 I OH = -8mA1.902.15 1.903.00 I OH = -16mA2.40 2.80 2.403.00 I OH = -24mA 2.30 3.68 2.304.50 I OH = -32mA 3.904.203.80V OLLOW LevelOutput Voltage1.65V IN =V IL or V IHI OL = 100µA 0 0.10 0.10V2.30 0 0.10 0.103.00 0 0.10 0.104.50 0 0.10 0.101.65V IN =V ILor V IHI OL = 4mA0.08 0.24 0.24 V2.30 I OL = 8mA0.10 0.30 0.30 3.00 I OL = 16mA0.15 0.40 0.40 3.00 I OL = 24mA 0.22 0.55 0.55 4.5 I OL = 32mA0.22 0.55 0.55 I IN Input Leakage Current0 to 5.50V IN =5.5V, GND±0.1±1µA I OFF Power OffLeakage Current0 V IN or V OUT =5.5V 1 10 µAI CCQuiescent SupplyCurrent1.65 to 5.50 V IN =5.5V, GND10µA® UHS 2-Input Non-Inverting Multiplexert PLH, t PHLFigure 5Figure 6Propagation Delay I n to ZC L =15pF, R L =1M Ω, 5.00 ± 0.50 1.2 3.5 5.8 1.2 6.1 3.30 ± 0.30 0.8 2.6 3.9 0.8 4.2 5.00 ± 0.500.5 1.9 3.1 0.5 3.3 Propagation Delay S to Z3.30 ± 0.30 C L =50pF, R L =500Ω, 1.2 3.24.8 1.25.2 5.00 ± 0.50 0.8 2.4 3.8 0.8 4.1 Propagation Delay I n to Z3.30 ± 0.30 C L =50pF, R L =500Ω,1.2 3.2 4.6 1.2 5.05.00 ± 0.50 0.8 2.4 3.7 0.8 4.0C IN Input Capacitance 0.002pFC PDPower DissipationCapacitance (4)3.3014pF Figure 75.00 17Note:4. C PD is defined as the value of the internal equivalent capacitance which is derived from dynamic operatingcurrent consumption (I CCD ) at no output loading and operating at 50% duty cycle. C PD is related to I CCD dynamic operating current by the expression: I CCD =(C PD )(V CC )(f IN )+(I CC static).Note:5. C L includes load and stray capacitance.Input PRR=1.0MHz, t w =500ns.Figure 5. AC Test CircuitFigure 6. AC WaveformsInput=AC Waveform; PRR=Variable; Duty Cycle=50%.® UHS 2-Input Non-Inverting MultiplexerDETAIL ASCALE: 60X1.000.801.100.800.10C0.250.100.460.260.20GAGE PLANE(R0.10)30°0°SEATING PLANEC0.100.00NOTES: UNLESS OTHERWISE SPECIFIEDA) THIS PACKAGE CONFORMS TO EIAJ SC-88, 1996.B) ALL DIMENSIONS ARE IN MILLIMETERS. C) DIMENSIONS DO NOT INCLUDE BURRS OR MOLD FLASH.D) DRAWING FILENAME: MKT-MAA06AREV62.10±0.300.10A B0.651.30(0.25)0.300.15131.300.40 MINSEE DETAIL ALAND PATTERN RECOMMENDATIONFigure 8. 6-Lead, SC70, EIAJ SC-88, 1.25mm WidePackage drawings are provided as a service to customers considering Fairchild components. Drawings may change in any manner without notice. Please note the revision and/or date on the drawing and contact a Fairchild Semiconductor representative to verify or obtain the most recent revision. Package specifications do not expand the terms of Fairchild’s worldwide terms and conditions, specifically the warranty therein, which covers Fairchild products.Always visit Fairchild Semiconductor’s online packaging area for the most recent package drawings: /packaging/.® UHS 2-Input Non-Inverting Multiplexer2. DIMENSIONS ARE IN MILLIMETERS1. CONFORMS TO JEDEC STANDARD M0-252 VARIATION UAAD MAC06AREVCNotes:3. DRAWING CONFORMS TO ASME Y14.5M-1994TOP VIEWRECOMMENED LAND PATTERNBOTTOM VIEWA0.55MAX0.05C(0.52)(0.30)6X 1X6X PIN 1DETAIL A0.075 X 45CHAMFER0.250.150.350.250.400.300.5(0.05) 1.0DETAIL APIN 1 TERMINAL0.400.300.450.350.100.000.10C B A 0.05CC0.05C0.050.005X 5X 6X(0.13)4X6XFigure 9. 6-Lead, MicroPak™, 1.0mm WidePackage drawings are provided as a service to customers considering Fairchild components. Drawings may change in any manner without notice. Please note the revision and/or date on the drawing and contact a Fairchild Semiconductor representative to verify or obtain the most recent revision. Package specifications do not expand the terms of Fairchild’s worldwide terms and conditions, specifically the warranty therein, which covers Fairchild products.Always visit Fairchild Semiconductor’s online packaging area for the most recent package drawings: /packaging/.®UHS 2-Input Non-Inverting Multiplexer DETAIL A5XFigure 10. 6-Lead, MicroPak2, 1x1mm Body, .35mm PitchPackage drawings are provided as a service to customers considering Fairchild components. Drawings may change in any mannerwithout notice. Please note the revision and/or date on the drawing and contact a Fairchild Semiconductor representative to verifyor obtain the most recent revision. Package specifications do not expand the terms of Fairchild’s worldwide terms and conditions, specificallythe warranty therein, which covers Fairchild products.Always visit Fairchild Semiconductor’s online packaging area for the most recent package drawings:/packaging/.NC7SZ157 — TinyLogic ® UHS 2-Input Non-Inverting Multiplexer。
NCC日本化工电容规格书
692 105℃
2,000 160 ~ 450
692 85℃
2,000 160 ~ 450
692 105℃
2,000 35、50、160~450
692 85℃
3,000 160 ~ 450
692 105℃
3,000 160 ~ 450
692 105℃ 2,000/3,000 160 ~ 450
692 85℃
铝电解电容器
引线型铝电解电容器
CAT.No.C1001I (Ver.2)
产品检索
产品指南
产品规格 产品型号代码附表
目 录 产品一览表 产品体系图 使用注意事项 (非固体铝) 产品型号体系 环境对应 包装规格 编带规格 系列的撤并与标准化 海外生产基地 引线型铝电解电容器
铝电解电容器
铝电解电容器
产品指南
铝电解电容器
产品指南
接前页
标 准
小 型 ·
低
长 寿
高 信 形状
品
薄 型 化
Z化 命
赖 性
工作上限温度· 标准寿命 (hours)
额定电压范围 (Vdc)
04 105℃
3,000 6.3 ~ 50
04 125℃ 3,000/5,000 25 ~ 50
04 125℃ 2,000~5,000 10 ~ 450
04 85℃
1,000 4 ~ 50
04 105℃
1,000 4 ~ 50
04 85℃
1,000 4 ~ 63
04 105℃
1,000 4 ~ 63
04 85℃
2,000 6.3 ~ 450
04 105℃ 1,000/2,000 6.3 ~ 450
华中HNC-21M 世纪星数控铣床说明书-P79

HNC-21M世纪星铣削数控装置 编程说明书武汉华中数控股份有限公司中国武汉目录第一章概述 (1)1.1 数控编程概述 (1)1.1.1 定义一个零件程序 (1)1.1.2 准备一个零件程序 (1)1.2数控机床概述 (1)1.2.1 机床坐标轴 (1)1.2.2 机床坐标系机床零点和机床参考点 (2)1.2.3 工件坐标系程序原点和对刀点 (3)第二章零件程序的结构 (5)2.1 指令字的格式 (5)2.2 程序段的格式 (6)2.3 程序的一般结构 (6)第三章 HNC-21M的编程指令体系 (7)3.1 辅助功能M代码 (7)3.1.1 CNC内定的辅助功能 (8)(1) 程序暂停M00 (8)(2) 程序结束M02 (8)(3) 程序结束并返回到零件程序头M30 (8)(4) 子程序调用M98及从子程序返回M99 (8)3.1.2 PLC设定的辅助功能 (9)(1) 主轴控制指令M03M04M05 (9)(2) 换刀指令M06 (9)(3) 冷却液打开停止指令M07M09 (9)3.2 主轴功能S进给功能F和刀具功能T (9)3.2.1 主轴功能S (9)3.2.2 进给速度F (9)3.2.3 刀具功能(T机能) (10)3.3 准备功能G代码 (10)3.3.1有关单位的设定 (10)(1) 尺寸单位选择G20G21G22 (10)(2) 进给速度单位的设定G94G95 (11)3.3.2 有关坐标系和坐标的指令 (11)(1) 绝对值编程G90与相对值编程G91 (11)(2) 工件坐标系设定G92 (12)(3) 工件坐标系选择G54~G59 (13)(4) 局部坐标系设定G52 (14)(5) 直接机床坐标系编程G53 (15)(6) 坐标平面选择G17G18G19 (15)3.3.3 进给控制指令 (15)(1) 快速定位G00 (15)(2) 单方向定位G60 (16)(3) 线性进给G01 (16)(4) 圆弧进给G02/G03 (17)(5) 螺旋线进给G02/G03 (19)(6) 虚轴指定G07及正弦线插补 (20)3. 3.4 回参考点控制指令 (21)(1) 自动返回参考点G28 (21)(2) 自动从参考点返回G29 (21)3.3.5 刀具补偿功能指令 (22)(1) 刀具半径补偿G40G41G42 (22)(2) 刀具长度补偿G43G44G49 (24)3.3.6 其他功能指令 (26)(1) 暂停指令G04 (26)(2) 准停检验G09 (26)(2) 段间过渡方式G61G64 (27)3.3.7 简化编程指令 (28)(1) 镜像功能G24G25 (28)(2) 缩放功能G50G51 (30)(3) 旋转变换G68G69 (31)3.3.8 固定循环 (33)(1) G73高速深孔加工循环 (34)(2) G74反攻丝循环 (35)(3) G76精镗循环 (36)(4) G81钻孔循环(中心钻) (36)(5) G82带停顿的钻孔循环 (37)(6) G83深孔加工循环 (37)(7) G84攻丝循环 (38)(8) G85镗孔循环 (39)(9) G86镗孔循环 (39)(10) G87反镗循环 (39)(11) G88镗孔循环 (40)(12) G89镗孔循环 (41)(13) G80取消固定循环 (41)3.4 宏指令编程 (42)3.4.1 宏变量及常量 (43)(1) 宏变量 (43)(2) 常量 (45)3.4.2 运算符与表达式 (46)(1) 算术运算符 (46)(2) 条件运算符 (46)(3) 逻辑运算符 (46)(4) 函数 (46)(5) 表达式 (46)3.4.3 赋值语句 (46)3.4.4 条件判别语句IF ELSE ENDIF (46)3.4.5 循环语句WHILE ENDW (47)附表1 准备功能一览表 (49)附录1 HNC-21M固定循环宏程序 (52)(1) 固定循环指令的实现及子程序调用的参数传递 (52)(2) 固定循环指令的宏程序实现 (54)1. 第一章概述本章的目的是对本说明书中提到的一些基本概念进行解释1.1 数控编程概述1.1.1 定义零件程序零件程序是由数控装置专用编程语言书写的一系列指令组成的应用得最广泛的是ISO码国际标准化组织规定的代码]数控装置将零件程序转化为对机床的控制动作最常使用的程序存储介质是穿孔纸带和磁盘1.1.2 准备零件程序如图1.1.1所示可以用传统的方法手工编制一个零件程序也可以用一套CAD/CAM系统如目前流行的 MasterCAM系统来创建一个零件程序图1.1.1 准备一个零件程序1.2数控机床概述1.2.1 机床坐标轴为简化编程和保证程序的通用性对数控机床的坐标轴和方向命名制订了统一的标准规定直线进给坐标轴用X Y Z 表示常称基本坐标轴X Y Z 坐标轴的相互关系用右手定则决定如图1.2.1所示图中大姆指的指向为X 轴的正方向食指指向为Y 轴的正方向中指指向为Z 轴的正方向 +X+X +Y +Z+Z +CZ +A +B+C +A X图1.2.1 机床坐标轴围绕XYZ 轴旋转的圆周进给坐标轴分别用ABC表示根据右手螺旋定则如图所示以大姆指指向+X +Y +Z 方向则食指中指等的指向是圆周进给运动的+A+B +C 方向 数控机床的进给运动有的由主轴带动刀具运动来实现有的由工作台带着工件运动来实现上述坐标轴正方向是假定工件不动刀具相对于工件做进给运动的方向如果是工件移动则用加的字母表示按相对运动的关系工件运动的正方向恰好与刀具运动的正方向相反即有+X =-X , +Y =-Y , +Z =-Z +A =-A , +B =-B , +C =-C同样两者运动的负方向也彼此相反机床坐标轴的方向取决于机床的类型和各组成部分的布局对铣床而言 Z 轴与主轴轴线重合刀具远离工件的方向为正方向(+Z)X 轴垂直于Z轴并平行于工件的装卡面如果为单立柱铣床面对刀具主轴向立柱方向看其右运动的方向为X轴的正方向(+X )Y 轴与X 轴和Z 轴一起构成遵循右手定则的坐标系统1.2.2 机床坐标系机床零点和机床参考点机床坐标系是机床固有的坐标系机床坐标系的原点也称为机床原点或机床零点在机床经过设计制造和调整后这个原点便被确定下来它是固定的点数控装置上电时并不知道机床零点每个坐标轴的机械行程是由最大和最小限位开关来限定的为了正确地在机床工作时建立机床坐标系通常在每个坐标轴的移动范围内设置一个机床参考点测量起点机床起动时通常要进行机动或手动回参考点以建立机床坐标系机床参考点可以与机床零点重合也可以不重合通过参数指定机床参考点到机床零点的距离机床回到了参考点位置也就知道了该坐标轴的零点位置找到所有坐标轴的参考点CNC就建立起了机床坐标系机床坐标轴的有效行程范围是由软件限位来界定的其值由制造商定义机床零点OM机床参考点Om机床坐标轴的机械行程及有效行程的关系如图1.2.2所示图1.2.2 机床零点OM和机床参考点Om1.2.3 工件坐标系程序原点和对刀点工件坐标系是编程人员在编程时使用的编程人员选择工件上的某一已知点为原点也称程序原点建立一个新的坐标系称为工件坐标系工件坐标系一旦建立便一直有效直到被新的工件坐标系所取代工件坐标系的原点选择要尽量满足编程简单尺寸换算少引起的加工误差小等条件一般情况下以坐标式尺寸标注的零件程序原点应选在尺寸标注的基准点对称零件或以同心圆为主的零件程序原点应选在对称中心线或圆心上Z轴的程序原点通常选在工件的上表面对刀点是零件程序加工的起始点对刀的目的是确定程序原点在机床坐标系中的位置对刀点可与程序原点重合也可在任何便于对刀之处但该点与程序原点之间必须有确定的坐标联系可以通过CNC将相对于程序原点的任意点的坐标转换为相对于机床零点的坐标加工开始时要设置工件坐标系用G92指令可建立工件坐标系用G54~G59指令可选择工件坐标系2. 第二章 零件程序的结构 一个零件程序是一组被传送到数控装置中去的指令和数据一个零件程序是由遵循一定结构句法和格式规则的若干个程序段组成的而每个程序段是由若干个指令字组成的如图2.1所示图2.1 程序的结构2.1 指令字的格式 一个指令字是由地址符(指令字符)和带符号如定义尺寸的字或不带符号如准备功能字G 代码的数字数据组成的程序段中不同的指令字符及其后续数值确定了每个指令字的含义在数控程序段中包含的主要指令字符如表2.1所示表2.1 指令字符一览表 机 能地 址 意 义 零件程序号% 程序编号%1~4294967295 程序段号N 程序段编号N0~4294967295 准备机能G 指令动作方式(直线圆弧等) G00-99尺寸字 X Y Z A B C U V W 坐标轴的移动命令99999.999R 圆弧的半径固定循环的参数I J K 圆心相对于起点的坐标固定循环的参数 进给速度F 进给速度的指定 F0~24000 主轴机能S 主轴旋转速度的指定 S0~9999 刀具机能 T 刀具编号的指定 T0~99辅助机能 M机床侧开/关控制的指定 M0~99 补偿号 H D刀具补偿号的指定 00~99 暂停 P X暂停时间的指定 秒 程序号的指定 P子程序号的指定P1~4294967295 重复次数 L子程序的重复次数固定循环的重复次数参数 P Q R 固定循环的参数2.2 程序段的格式一个程序段定义一个将由数控装置执行的指令行程序段的格式定义了每个程序段中功能字的句法如图2.2.1所示程序段图2.2.1 程序段格式2.3 程序的一般结构一个零件程序必须包括起始符和结束符一个零件程序是按程序段的输入顺序执行的而不是按程序段号的顺序执行的但书写程序时建议按升序书写程序段号 华中世纪星数控装置HNC-21M 的程序结构程序起始符%(或O)符%(或O)后跟程序号程序结束M02或M30注释符括号( )内或分号后的内容为注释文字3. 第三章 HNC-21M的编程指令体系3.1 辅助功能M代码辅助功能由地址字M和其后的一或两位数字组成主要用于控制零件程序的走向以及机床各种辅助功能的开关动作M功能有非模态M功能和模态M功能二种形式非模态M功能(当段有效代码) 只在书写了该代码的程序段中有效模态M功能(续效代码)一组可相互注销的M功能这些功能在被同一组的另一个功能注销前一直有效模态M功能组中包含一个缺省功能见表3.1系统上电时将被初始化为该功能另外M功能还可分为前作用M功能和后作用M功能二类前作用M功能在程序段编制的轴运动之前执行后作用M功能在程序段编制的轴运动之后执行华中世纪星HNC-21M数控装置M指令功能如表3.1所示标记者为缺省值表3.1 M代码及功能代码模态功能说明代码模态功能说明M00 非模态程序停止M03 模态主轴正转起动M02 非模态程序结束M04 模态主轴反转起动M30 非模态程序结束并返M05 模态主轴停止转动回程序起点M06 非模态换刀M98 非模态调用子程序M07 模态切削液打开M99 非模态子程序结束M09 模态切削液停止其中M00M02M30M98M99用于控制零件程序的走向是CNC內定的辅助功能不由机床制造商设计决定也就是说与PLC程序无关其余M代码用于机床各种辅助功能的开关动作其功能不由CNC內定而是由PLC程序指定所以有可能因机床制造厂不同而有差异(表內为标准PLC指定的功能)请使用者参考机床说明书3.1.1 CNC内定的辅助功能(1) 程序暂停M00当CNC执行到M00指令时将暂停执行当前程序以方便操作者进行刀具和工件的尺寸测量工件调头手动变速等操作暂停时机床的主轴进给及冷却液停止而全部现存的模态信息保持不变欲继续执行后续程序重按操作面板上的循环启动键M00为非模态后作用M功能(2) 程序结束M02M02编在主程序的最后一个程序段中当CNC执行到M02指令时机床的主轴进给冷却液全部停止加工结束使用M02的程序结束后若要重新执行该程序就得重新调用该程序或在自动加工子菜单下按F4键请参考HNC-21M操作说明书然后再按操作面板上的循环启动键M02为非模态后作用M功能(3) 程序结束并返回到零件程序头M30M30和M02功能基本相同只是M30指令还兼有控制返回到零件程序头(%)的作用使用M30的程序结束后若要重新执行该程序只需再次按操作面板上的循环启动键(4) 子程序调用M98及从子程序返回M99M98用来调用子程序M99表示子程序结束执行M99使控制返回到主程序(i) 子程序的格式%****M99在子程序开头必须规定子程序号以作为调用入口地址在子程序的结尾用M99以控制执行完该子程序后返回主程序(ii) 调用子程序的格式M98 P_ L_P被调用的子程序号L重复调用次数注可以带参数调用子程序请参考附录1G65指令的功能和参数与M98相同3.1.2 PLC设定的辅助功能(1) 主轴控制指令M03M04M05M03启动主轴以程序中编制的主轴速度顺时针方向从Z轴正向朝Z轴负向看旋转M04启动主轴以程序中编制的主轴速度逆时针方向旋转M05使主轴停止旋转M03M04为模态前作用M功能M05为模态后作用M功能M05为缺省功能M03M04M05可相互注销(2) 换刀指令M06M06用于在加工中心上调用一个欲安装在主轴上的刀具刀具将被自动地安装在主轴上M06为非模态后作用M功能(3) 冷却液打开停止指令M07M09M07指令将打开冷却液管道M09指令将关闭冷却液管道M07为模态前作用M功能M09为模态后作用M功能M09为缺省功能3.2 主轴功能S进给功能F和刀具功能T3.2.1 主轴功能S主轴功能S控制主轴转速其后的数值表示主轴速度单位为转/每分钟(r/min)S是模态指令S功能只有在主轴速度可调节时有效3.2.2 进给速度FF指令表示工件被加工时刀具相对于工件的合成进给速度F 的单位取决于G94(每分钟进给量mm/min)或G95(每转进给量mm/r)当工作在G01G02或G03方式下编程的F一直有效直到被新的F值所取代而工作在G00G60方式下快速定位的速度是各轴的最高速度与所编F无关借助操作面板上的倍率按键F可在一定范围内进行倍率修调当执行攻丝循环G84螺纹切削G33时倍率开关失效进给倍率固定在1003.2.3 刀具功能(T机能)T代码用于选刀其后的数值表示选择的刀具号T代码与刀具的关系是由机床制造厂规定的在加工中心上执行T指令刀库转动选择所需的刀具然后等待直到M06指令作用时自动完成换刀T指令同时调入刀补寄存器中的刀补值(刀补长度和刀补半径)T指令为非模态指令但被调用的刀补值一直有效直到再次换刀调入新的刀补值3.3 准备功能G代码准备功能G指令由G后一或二位数值组成它用来规定刀具和工件的相对运动轨迹机床坐标系坐标平面刀具补偿坐标偏置等多种加工操作华中世纪星HNC-21M数控装置G功能指令见附表1G功能有非模态G功能和模态G功能之分非模态G功能只在所规定的程序段中有效程序段结束时被注销模态G功能一组可相互注销的G功能这些功能一旦被执行则一直有效直到被同一组的G功能注销为止模态G功能组中包含一个缺省G功能附表1中有标记者上电时将被初始化为该功能没有共同参数的不同组G代码可以放在同一程序段中而且与顺序无关例如G90G17可与G01放在同一程序段但G24G68G51等不能与G01放在同一程序段3.3.1有关单位的设定(1) 尺寸单位选择G20G21G22格式 G20G21G22说明G20英制输入制式G21公制输入制式G22脉冲当量输入制式3种制式下线性轴旋转轴的尺寸单位如表3.2所示G20G21G22为模态功能可相互注销G21为缺省值表3.2 尺寸输入制式及其单位线性轴旋转轴英制(G20) 英寸度公制(G21) 毫米度脉冲当量(G22) 移动轴脉冲当量旋转轴脉冲当量(2) 进给速度单位的设定G94G95格式G94 [ F_ ]G95 [ F_ ]说明G94每分钟进给G95每转进给G94为每分钟进给对于线性轴F的单位依G20/G21/G22的设定而为mm/min in/min或脉冲当量/min对于旋转轴F的单位为度/min或脉冲当量/minG95为每转进给即主轴转一周时刀具的进给量F的单位依G20/G21/G22的设定而为mm/r in/r或脉冲当量/r 这个功能只在主轴装有编码器时才能使用G94G95为模态功能可相互注销G94为缺省值3.3.2 有关坐标系和坐标的指令(1) 绝对值编程G90与相对值编程G91格式 G90G91说明G90绝对值编程每个编程坐标轴上的编程值是相对于程序原点的G91相对值编程每个编程坐标轴上的编程值是相对于前一位置而言的该值等于沿轴移动的距离G90G91为模态功能可相互注销G90为缺省值G90G91可用于同一程序段中但要注意其顺序所造成的差异例1如图3.3.1所示使用G90G91编程要求刀具由原点按顺序移动到123点N X Y N01 X20 Y15N02 X40 Y45N03 X60 Y25G90编程 N X Y N01 X20 Y15N02 X20 Y30N03 X20 Y-20G91编程图3.3.1 G90/G91编程选择合适的编程方式可使编程简化当图纸尺寸由一个固定基准给定时采用绝对方式编程较为方便而当图纸尺寸是以轮廓顶点之间的间距给出时采用相对方式编程较为方便(2) 工件坐标系设定G92 格式G92 X_Y_Z_A _ 说明X Y ZA 设定的工件坐标系原点到刀具起点的有向距离(注意ΗΝC −21Μ的最大联动轴数为4本说明书中假设第四轴用A 表示)G92指令通过设定刀具起点对刀点与坐标系原点的相对位置建立工件坐标系工件坐标系一旦建立绝对值编程时的指令值就是在此坐标系中的坐标值例2使用G92编程建立如图3.3.2所示的工件坐标系图3.3.2 工件坐标系的建立G92 X30.0 Y30.0 Z20.0执行此程序段只建立工件坐标系刀具并不产生运动 G92指令为非模态指令一般放在一个零件程序的第一段(3) 工件坐标系选择G54~G59 格式G G G G G G 545556575859 说明G54~G59是系统预定的6个工件坐标系(如图 3.3.3)可根据需要任意选用这6个预定工件坐标系的原点在机床坐标系中的值(工件零点偏置值)可用MDI 方式输入系统自动记忆工件坐标系一旦选定后续程序段中绝对值编程时的指令值均为相对此工件坐标系原点的值G54~G59为模态功能可相互注销G54为缺省值图3.3.3 工件坐标系选择(G54~G59)例3如图3.3.4所示使用工件坐标系编程要求刀具从当前点移动到A 点再从A 点移动到B 点图 3.3.4 使用工件坐标系编程%1000N01 G54 G00 G90 X30 Y40N02 G59N03 G00 X30 Y30当前点A B注意使用该组指令前先用MDI 方式输入各坐标系的坐标原点在机床坐标系中的坐标值(4) 局部坐标系设定G52 格式G52 X_Y_Z_A_ 说明X Y Z A 局部坐标系原点在当前工件坐标系中的坐标值G52指令能在所有的工件坐标系(G92G54~G59)内形成子坐标系即局部坐标系如图3.3.5含有G52指令的程序段中绝对值编程方式的指令值就是在该局部坐标系中的坐标值设定局部坐标系后工件坐标系和机床坐标系保持不变图3.3.5 局部坐标系的设定G52G52指令为非模态指令在缩放及旋转功能下不能使用G52指令但在G52下能进行缩放及坐标系旋转(5) 直接机床坐标系编程G53格式G53说明G53是机床坐标系编程在含有G53的程序段中绝对值编程时的指令值是在机床坐标系中的坐标值G53指令为非模态指令(6) 坐标平面选择G17G18G19格式 G17G18G19说明G17选择XY平面G18选择ZX平面G19选择YZ平面该组指令选择进行圆弧插补和刀具半径补偿的平面G17G18G19为模态功能可相互注销G17为缺省值注意移动指令与平面选择无关例如指令G17 G01 Z10时Z轴照样会移动3.3.3 进给控制指令(1) 快速定位G00格式G00 X_Y_Z_A_说明X Y Z A快速定位终点在G90时为终点在工件坐标系中的坐标在G91时为终点相对于起点的位移量G00指令刀具相对于工件以各轴预先设定的速度从当前位置快速移动到程序段指令的定位目标点G00指令中的快移速度由机床参数快移进给速度对各轴分别设定不能用F 规定G00一般用于加工前快速定位或加工后快速退刀快移速度可由面板上的快速修调旋钮修正G00为模态功能可由G01G02G03或G33功能注销注意在执行G00指令时由于各轴以各自速度移动不能保证各轴同时到达终点因而联动直线轴的合成轨迹不一定是直线操作者必须格外小心以免刀具与工件发生碰撞常见的做法是将Z 轴移动到安全高度再放心地执行G00指令例4如图3.3.6所示使用G00编程要求刀具从A 点快速定位到B 点图3.3.6 G00编程绝对值编程G90 G00 X90 Y45 增量值编程:G91 G00 X70 Y30从A 到B 快速定位当X 轴和Y 轴的快进速度相同时从A 点到B 点的快速定位路线为A C B 即以折线的方式到达B 点而不是以直线方式从A B(2)单方向定位G60 格式G60 X_Y_Z_A_ 说明X Y Z A 单向定位终点在G90时为终点在工件坐标系中的坐标在G91时为终点相对于起点的位移量G60单方向定位过程各轴先以G00速度快速定位到一中间点然后以一固定速度移动到定位终点各轴的定位方向(从中间点到定位终点的方向)以及中间点与定位终点的距离由机床参数单向定位偏移值设定当该参数值<0时定位方向为负当该参数值>0时定位方向为正G60指令仅在其被规定的程序段中有效 (3) 线性进给G01 格式 G01 X _Y_Z_A_F_ 说明X Y Z A 线性进给终点在G90时为终点在工件坐标系中的坐标在G91时为终点相对于起点的位移量F_合成进给速度G01指令刀具以联动的方式按F 规定的合成进给速度从当前位置按线性路线(联动直线轴的合成轨迹为直线)移动到程序段指令的终点G01是模态代码可由G00G02G03或G33功能注销例5如图3.3.7所示使用G01编程要求从A 点线性进给到B 点此时的进给路线是从A B的直线图3.3.7 G01编程绝对值编程G90 G01 X90 Y45 F800 增量值编程:G91 G01 X70 Y30 F800从A 到B 线性进给(4) 圆弧进给G02/G03 格式G17F_R_I_J_X_Y_G03G02G18G02G03X_Z_I_K_R_F_G19G02G03Y_Z_J_K_R_F_说明G02 顺时针圆弧插补(如图3.3.8所示) G03 逆时针圆弧插补(如图3.3.8所示) G17 XY 平面的圆弧 G18 ZX 平面的圆弧 G19 YZ 平面的圆弧X, Y, Z 圆弧终点在G90时为圆弧终点在工件坐标系中的坐标在G91时为圆弧终点相对于圆弧起点的位移量I, J, K 圆心相对于圆弧起点的偏移值(等于圆心的坐标减去圆弧起点的坐标如图3.3.9所示) 在G90/G91时都是以增量方式指定R 圆弧半径当圆弧圆心角小于180时R 为正值否则R 为负值F 被编程的两个轴的合成进给速度ZXZY 图3.3.8 不同平面的G02与G03选择图3. 3. 9 I J K 的 选 择例6使用G02对图3.3.10所示劣弧a 和优弧b 编程图3.3.10 圆弧编程(i) 圆弧aG91 G02 X30 Y30 R30 F300G91 G02 X30 Y30 I30 J0 F300G90 G02 X0 Y30 R30 F300G90 G02 X0 Y30 I30 J0 F300 (ii) 圆弧bG91 G02 X30 Y30 R −30 F300G91 G02 X30 Y30 I0 J30 F300G90 G02 X0 Y30 R −30 F300G90 G02 X0 Y30 I0 J30 F300圆弧编程的4种方法组合例7 使用G02/G03对图3.3.11所示的整圆编程图 3.3.11 整圆编程i 从A 点顺时针一周时G90 G02 X30 Y0 I −30 J0 F300G91 G02 X0 Y0 I −30 J0 F300(ii) 从B 点逆时针一周时G90 G03 X0 Y −30 I0 J30 F300G91 G03 X0 Y0 I0 J30 F300注意(1) 顺时针或逆时针是从垂直于圆弧所在平面的坐标轴的正方向看到的回转方向(2) 整圆编程时不可以使用R 只能用I J K (3) 同时编入R 与I J K 时R 有效 (5) 螺旋线进给G02/G03格式G17Z_F_R_I_J_X_Y_G03G02G18Y_F_R_I_K_X_Z_G03G02G19X_F_R_J_K_Y_Z_G03G02说明X, Y, Z 中由G17/G18/G19平面选定的两个坐标为螺旋线投影圆弧的终点意义同圆弧进给第3坐标是与选定平面相垂直的轴终点 其余参数的意义同圆弧进给该指令对另一个不在圆弧平面上的坐标轴施加运动指令对于任何小于360的圆弧可附加任一数值的单轴指令 例8 使用G03对图3.3.12所示的的螺旋线编程G91 编程时G91 G17 F300G03 X-30 Y30 R30 Z10G90 编程时G90 G17 F300G03 X0 Y30 R30 Z10(6) 虚轴指定G07及正弦线插补 格式G07 X_Y_Z_A_ 说明X Y Z A 被指令轴后跟数字0则该轴为虚轴后跟数字1则该轴为实轴G07为虚轴指定和取消指令G07为模态指令若一轴为虚轴则此轴只参加计算不运动虚轴仅对自动操作有效对手动操作无效用G07可进行正弦曲线插补即在螺旋线插补前将参加圆弧插补的某一轴指定为虚轴则螺旋线插补变为正弦线插补例9使用G03对图3.3.13所示的正弦线编程图3.3.13 正弦线插补编程G90 G00 X-50 Y0 Z0G07 X0 G91G03 X0 Y0 I0 J50 Z60 F8003. 3.4回参考点控制指令(1) 自动返回参考点G28 格式G28 X_Y_Z_A_说明X Y Z A 回参考点时经过的中间点非参考点在G90时为中间点在工件坐标系中的坐标在G91时为中间点相对于起点的位移量G28指令首先使所有的编程轴都快速定位到中间点然后再从中间点返回到参考点一般G28指令用于刀具自动更换或者消除机械误差在执行该指令之前应取消刀具半径补偿和刀具长度补偿在G28的程序段中不仅产生坐标轴移动指令而且记忆了中间点坐标值以供G29使用电源接通后在没有手动返回参考点的状态下指定G28时从中间点自动返回参考点与手动返回参考点相同这时从中间点到参考点的方向就是机床参数回参考点方向设定的方向G28指令仅在其被规定的程序段中有效 (2) 自动从参考点返回G29 格式G29 X _Y_Z_A_ 说明X Y Z A 返回的定位终点在G90时为定位终点在工件坐标系中的坐标在G91时为定位终点相对于G28中间点的位移量G29可使所有编程轴以快速进给经过由G28指令定义的中间点。
NC7SZ19 1-of-2 解码器 分组器说明书

NC7SZ19TinyLogic UHS 1-of-2Decoder / DemultiplexerDescriptionThe NC7SZ19 is a 1−of −2 decoder with a common output enable.The device is fabricated with advanced CMOS technology to achieve ultra −high speed with high output drive while maintaining low static power dissipation over a broad V CC operating range. The device is specified to operate over the 1.65 V to 5.5 V V CC range. The inputs and outputs are high impedance when V CC is 0 V . Inputs tolerate voltages up to 5.5 V independent of V CC operating voltage.Features•Ultra High −Speed: t PD 2.7 ns Typical at 5 V V CC •Broad V CC Operating Range: 1.65 V to 5.55 V •Power Down High Impednce Inputs / Outputs•Over −V oltage Tolerance Inputs Facilitate 5 V to 3 V Translation •Proprietary Noise / EMI Reduction Circuitry •Ultra −Small MicroPak ™ Packages•These Devices are Pb −Free, Halogen Free/BFR Free and are RoHS CompliantSee detailed ordering, marking and shipping information in the package dimensions section on page 5 of this data sheet.ORDERING INFORMATIONMARKINGDIAGRAMSSC −88(SC −70 6 Lead)1.25x2CASE 419AD −01SIP6 1.45x1.0CASE 127EBUDFN61.0X1.0, 0.35P CASE 517DPB4, Z19= Specific Device CodeKK = 2−Digit Lot Run Traceability Code XY = 2−Digit Date Code Format Z= Assembly Plant Code = Year Coding Scheme = Plant Code Identifier T= Die Run Code= Eight −Week Datacoding SchemePin ConfigurationsNOTES:1.AAA represents product code top mark (see Ordering Information).2.Orientation of top mark determines pin one location.3.Reading the top mark left to right, pin one is the lower left pin.Figure 1. SC70 (Top View)(Top View)A 1 6 Y0 GND 2 5 V CCE 3 4 Y1A Y0GND V CCE Y1Figure 2. MicroPak (Top Through View) Figure 3. Pin 1 OrientationPIN DEFINITIONSPin # SC70Pin # MicroPak Name Description 11A Decoder Address /Demultiplexer Select 22GND Ground33/E Decoder Output Enable /Demultiplexer Data 44Y1 Output55V CC Supply Voltage66Y0 Output FUNCTION TABLEInputs OutputA/E Y0 = A + /E Y1 = /A + /EL L L HH L H LX H H HH = HIGH Logic LevelL = LOW Logic LevelX = 3−STATEABSOLUTE MAXIMUM RATINGSSymbol Parameter Min Max Unit V CC Supply Voltage−0.5 6.5V V IN DC Input Voltage−0.5 6.5V V OUT DC Output Voltage−0.5 6.5VI IK DC Input Diode Current V IN < 0.5 V−−50mAI OK DC Output Diode Current V OUT < −0.5 V−−50mAI OUT DC Output Current−±50mAI CC or I GND DC V CC or Ground Current−±100mAT STG Storage Temperature Range−65+150°C T J Junction Temperature Under Bias−+150°C T L Junction Lead Temperature (Soldering, 10 Seconds)−+260°C P D Power Dissipation at +85°C SC70−6−190mWMicroPak−6−327MicroPak2™−6−327 ESD Human Body Model, JEDEC: JESD22−A114−4000V Charge Device Model, JEDEC: JESD22−C101−2000Stresses exceeding those listed in the Maximum Ratings table may damage the device. If any of these limits are exceeded, device functionality should not be assumed, damage may occur and reliability may be affected.RECOMMENDED OPERATING CONDITIONSSymbol Parameter Conditions Min Max Unit V CC Supply Voltage Operating 1.65 5.50V Supply Voltage Data Retention 1.5 5.5 V IN Input Voltage0 5.5V V OUT Output Voltage0V CC V t r, t f Input Rise and Fall Times V CC at 1.8 V ±0.15 V, 2.5 V ±0.2 V020ns/VV CC at 3.3 V ±0.3 V010V CC at 5.0 V ±0.5 V05 T A Operating Temperature−40+85°C q JA Thermal Resistance SC70−6−659°C/WMicroPak−6−382MicroPak2−6−382°C/W Functional operation above the stresses listed in the Recommended Operating Ranges is not implied. Extended exposure to stresses beyond the Recommended Operating Ranges limits may affect device reliability.DC ELECTICAL CHARACTERISTICSSymbol Parameter V CC(V)ConditionsT A = +25°C T A = −40 to +85°CUnit Min Typ Max Min MaxV IH HIGH Level Input Voltage 1.650.65 V CC−−0.65 V CC−V2.30 to 5.500.70 V CC−−0.70 V CC−V IL LOW Level Input Voltage 1.65−−0.35 V CC−0.35 V CC V2.30 to 5.50−−0.30 V CC−0.30 V CCV OH HIGH Level Output Voltage 1.65V IN= V IH,or V OL,I OH= −100 m A 1.55 1.65− 1.55−V2.30 2.20 2.30− 2.20−3.00 2.90 3.00− 2.90−4.50 4.40 4.50− 4.40−1.65I OH= −4 mA 1.29 1.52− 1.29−2.30I OH= −8 mA 1.90 2.15− 1.90−3.00I OH= −16 mA 2.40 2.80− 2.40−3.00I OH= −24 mA 2.30 3.68− 2.30−4.50I OH= −32 mA 3.80 4.20− 3.80−V OL LOW Level Output Voltage 1.65V IN= V IL, or V IH,I OL= 100 m A −0.000.10−0.10V2.30−0.000.10−0.103.00−0.000.10−0.104.50−0.000.10−0.101.65I OL= 4 mA−0.080.24−0.242.30I OL= 8 mA−0.100.30−0.303.00I OL= 16 mA−0.150.40−0.403.00I OL= 24 mA−0.220.55−0.554.50I OL= 32 mA−0.220.55−0.55I IN Input Leakage Current 1.65 to 5.5V IN = 5.5 V, GND−−±0.1−±1.0m A I OFF Power Off Leakage Current0V IN or V OUT= 5.5 V−−1−10m A I CC Quiescent Supply Current 1.65 to 5.50V IN= 5.5 V, GND−−1−10m AAC ELECTRICAL CHARACTERISTICSSymbol Parameter V CC(V)ConditionsT A = +25°C T A = −40 to +85°CUnit Min Typ Max Min Maxt PLH, t PHL Propagation Delay A or /E to Output (Figure 5, 6)1.80 ±0.15 C L = 15 pF,R L = 1 M W− 5.910.5−11.0ns2.50 ±0.20−3.5 6.0− 6.43.30 ±0.30− 2.74.1− 4.55.00 ±0.50− 2.1 3.2− 3.53.30 ±0.30 C L = 50 pF,R L = 500 W− 3.2 5.1− 5.4ns 5.00 ±0.50− 2.7 4.0− 4.3C IN Input Capacitance0− 2.3−−−pFC PD Power Dissipation Capacitance(Note 4) (Figure 5)3.30−10.5−−−pF 5.00−12.8−−−4.C PD is defined as the value of the internal equivalent capacitance which is derived from dynamic operating current consumption (I CCD) atno output loading and operating at 50% duty cycle. C PD is related to I CCD dynamic operating current by the expression:I CCD= (C PD) (V CC) (f IN) + (I CC static).AC Loading and WaveformsNOTES:5.C L includes load and stray capacitance.6.Input PRR = 1.0 MHz, t W = 500 ns.Figure 4. AC Test CircuitINPUTFigure 5. I CCD Test CircuitOUTPUTOUTPUTFigure 6. AC Waveformst r INPUTOut of PhaseOUTPUTIn Phase OUTPUTV CCGNDV OHV OLV OHV OLINPUTNOTE:7.Input = AC Waveform; t r = t f = 1.8 ns.8.PRR = 10 MHz; Duty Cycle = 50%.9./E Input = GND.ORDERING INFORMATIONDeviceTop Mark PackagesShipping † NC7SZ19P6X Z196−Lead SC70, EIAJ SC88, 1.25 mm Wide3000 / Tape & Reel NC7SZ19L6X B46−Lead MicroPak, 1.00 mm Wide5000 / Tape & Reel NC7SZ19FHXB46−Lead, MicroPak2, 1x1 mm Body, .35 mm Pitch5000 / Tape & Reel†For information on tape and reel specifications, including part orientation and tape sizes, please refer to our Tape and Reel Packaging Specifications Brochure, BRD8011/D.MicroPak and MicroPak2 are trademarks of Semiconductor Components Industries, LLC (SCILLC) or its subsidiaries in the United States and/or other countries.SIP6 1.45X1.0CASE 127EB ISSUE ODATE 31 AUG 2016SC −88 (SC −70 6 Lead), 1.25x2CASE 419AD −01ISSUE ADATE 07 JUL 2010TOP VIEWSIDE VIEWEND VIEWq Notes:(1) All dimensions are in millimeters. Angles in degrees.(2) Complies with JEDEC MO-203.SYMBOLMIN NOM MAX θA A1b cD E E1e L 0º8ºL20.000.150.100.261.801.801.150.65 BSC 0.15 BSC1.100.100.300.180.462.202.401.35L10.80θ14º10ºA20.80 1.000.42 REF 0.362.002.101.25UDFN6 1.0X1.0, 0.35PCASE 517DPISSUE ODATE 31 AUG 2016ON Semiconductor and are trademarks of Semiconductor Components Industries, LLC dba ON Semiconductor or its subsidiaries in the United States and/or other countries.ON Semiconductor owns the rights to a number of patents, trademarks, copyrights, trade secrets, and other intellectual property. A listing of ON Semiconductor’s product/patent coverage may be accessed atON Semiconductor makes no warranty, representation or guarantee regarding the suitability of its products for any particular purpose, nor does ON Semiconductor assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation special, consequential or incidental damages.PUBLICATION ORDERING INFORMATIONLITERATURE FULFILLMENT:TECHNICAL SUPPORT。
世纪星车床说明书华中数控机床

欢迎下载支持,谢谢!数控技术培训系列教程世纪星车床数控系统HNC-21/22T编程说明书华中科技大学国家数控系统工程技术研究中心武汉华中数控股份有限公司2001 年11 月前言非常感谢您选用了本公司生产的 HNC-21/22 世纪星系列数控系统。
本说明书详细介绍了数控编程基本知识、指令体系、各指令功能的特点、注意事项和宏指令编程方法,并配以大量典型编程实例和图例加以说明。
既可作为世纪星车床数控系统产品说明书,也可作为数控编程的培训教材。
在使用本产品前,请先仔细阅读本说明书,以达到最佳使用效果。
请妥善保存说明书,并交最终使用者认真阅读。
本说明书版权为武汉华中数控股份有限公司所有。
华中科技大学国家数控系统工程技术研究中心武汉华中数控股份有限公司2002 年11 月目录第一章概述 (1)1.1 数控编程概述 (1)1.2 数控编程基本知识 (1)1.2.1 机床坐标轴 (1)1.2.2 机床坐标系、机床零点和机床参考点 (3)1.2.3 工件坐标系、程序原点和对刀点 (4)第二章零件程序的结构 (5)2.1 指令字的格式 (5)2.2 程序段的格式 (6)2.3 程序的一般结构 (7)2.4 程序的文件名 (7)第三章 HNC-21T 的编程指令体系 (8)3.1 辅助功能M 代码 (8)3.1.1 CNC 内定的辅助功能 (9)(1) 程序暂停M00 (9)(2) 程序结束M02 (9)(3) 程序结束并返回到零件程序头M30 (9)(4) 子程序调用M98 及从子程序返回M99 (9)3.1.2 PLC 设定的辅助功能 (11)(1) 主轴控制指令M03、M04、M05 (11)(2) 冷却液打开、停止指令M07、M09 (11)3.2 主轴功能S、进给功能F 和刀具功能T (11)3.2.1 主轴功能S (11)3.2.2 进给速度F (12)3.2.3 刀具功能(T 机能) (12)3.3 准备功能G 代码 (13)3.3.1 有关单位的设定 (14)(1) 尺寸单位选择G20,G21 (14)(2) 进给速度单位的设定G94、G95 (15)3.3.2 有关坐标系和坐标的指令 (15)(1) 绝对编程G90 与增量编程G91 指令 (15)I(2) 工件坐标系设定G92 (15)(3) 零点偏置G54~G59 (18)(4) 直径方式和半径方式编程 (20)3.3.3 进给控制指令 (21)(1) 快速定位G00 (21)(2) 线性进给及倒角G01 (22)(3) 圆弧进给G02/G03 (25)(4) 螺纹切削G32 (27)3. 3.4 回参考点控制指令 (30)(1) 自动返回参考点G28 (30)(2) 自动从参考点返回G29 (31)3.3.5 暂停指令G04 (32)3.3.6 恒线速度功能G96、G97 (32)3.3.7 简单循环 (34)(1) 内(外)径切削循环G80 (34)★圆柱面内(外)径切削循环 (34)★园锥面内(外)径切削循环 (35)(2) 端面切削循环G81 (37)★端平面切削循环 (37)★园锥端面切削循环 (38)(3) 螺纹切削循环G82 (40)★直螺纹切削循环 (40)★锥螺纹切削循环 (41)3.3.8 复合循环 (43)(1) 内(外)径粗车复合循环G71 (43)(2) 端面粗车复合循环G72 (50)(3) 闭环车削复合循环G73 (54)(4) 螺纹切削复合循环G76 (57)(5) 复合循环指令注意事项 (60)3.3.9 刀具补偿功能指令 (60)刀具偏置补偿和刀具磨损补偿 (60)(3) 刀尖半径补偿G40,G41,G42 (63)3.3.9 综合编程实例 (64)第一章概述 (1)1.1 数控编程概述 (1)1.2 数控编程基本知识 (1)1.2.1 机床坐标轴 (1)1.2.2 机床坐标系、机床零点和机床参考点 (3)1.2.3 工件坐标系、程序原点和对刀点 (4)第二章零件程序的结构 (5)2.1 指令字的格式 (5)2.2 程序段的格式 (6)2.3 程序的一般结构 (7)2.4 程序的文件名 (7)第三章 HNC-21/22T 数控系统的编程指令体系 (8)3.1 辅助功能M 代码 (8)3.1.1 CNC 内定的辅助功能 (9)(1) 程序暂停M00 (9)(2) 程序结束M02 (9)(3) 程序结束并返回到零件程序头M30 (9)(4) 子程序调用M98 及从子程序返回M99 (9)3.1.2 PLC 设定的辅助功能 (11)(1) 主轴控制指令M03、M04、M05 (11)(2) 冷却液打开、停止指令M07、M09 (11)3.2 主轴功能S、进给功能F 和刀具功能T (11)3.2.1 主轴功能S (11)3.2.2 进给速度F (12)3.2.3 刀具功能(T 机能) (12)3.3 准备功能G 代码 (13)3.3.1 有关单位设定的G 功能 (14)(1) 尺寸单位选择G20,G21 (14)(2) 进给速度单位的设定G94、G95 (15)3.3.2 有关坐标系和坐标的G 功能 (15)(1) 绝对值编程G90 与相对值编程G91 (15)(2) 坐标系设定G92 (16)(3) 坐标系选择G54~G59 (18)(4) 直接机床坐标系编程G53 (19)(5) 直径方式和半径方式编程 (20)3.3.3 进给控制指令 (21)(1) 快速定位G00 (21)(2) 线性进给及倒角G01 (22)(3) 圆弧进给G02/G03 (25)(4) 螺纹切削G32 (27)3. 3.4 回参考点控制指令 (30)(1) 自动返回参考点G28 (30)(2) 自动从参考点返回G29 (31)3.3.5 暂停指令G04 (32)3.3.6 恒线速度指令G96、G97 (32)3.3.7 简单循环 (34)(1) 内(外)径切削循环G80 (34)★圆柱面内(外)径切削循环 (34)★园锥面内(外)径切削循环 (35)(2) 端面切削循环G81 (37)★端平面切削循环 (37)★园锥端面切削循环 (38)(3) 螺纹切削循环G82 (40)★直螺纹切削循环 (40)★锥螺纹切削循环 (41)3.3.7 复合循环 (43)(1) 内(外)径粗车复合循环G71 (43)(2) 端面粗车复合循环G72 (50)(3) 闭环车削复合循环G73 (54)(4) 螺纹切削复合循环G76 (57)(5) 复合循环指令注意事项 (60)3.3.8 刀具补偿功能指令 (60)刀具偏置补偿和刀具磨损补偿 (60)刀尖圆弧半径补偿G40,G41,G42 (63)编程步骤 (67)综合编程实例 (68)3.4 宏指令编程 (70)3.4.1 宏变量及常量 (70)(1) 宏变量 (70)(2) 常量 (73)3.4.2 运算符与表达式 (73)(1) 算术运算符: (73)(2) 条件运算符 (73)(3) 逻辑运算符 (74)(4) 函数 (74)(5) 表达式 (74)3.4.3 赋值语句 (74)3.4.4 条件判别语句IF,ELSE,ENDIF (74)3.4.5 循环语句WHILE,ENDW (74)附表1准备功能一览表 (76)附表2直径编程注意条件 (78)附录1HNC-21T 车削循环宏程序 (78)(1) 车削循环指令的实现及子程序调用的参数传递 (78)(2) 车削循环指令的宏程序实现 (83)第一章概述本书针对HNC-21/22T 世纪星数控车床系统进行编程说明,其编程语言为广泛使用的ISO 码。
NC车床常用资料

第一部分基本常识一.车床静态精度测量:1.机械重量及占地面积:V16: 3200KG 3290×1500 V20: 3200KG 3290×1500V26/60: 4200KG 3770×1740 V26/110:6000KG 3770×1740V36/85: 8500KG 4675×1985 V36/125:9100KG 5075×1985V46: 13500KG 6210×29802.电源容量及电线规格:(是在220V下的,括号内为380V的)电源容量电线规格开关规格V16: 23KVA 14(10) 100A(60)V20: 23KVA 14(10) 100A(60)V26: 40KVA 22(14) 150A(100)V36: 54KVA 38(22) 225A(150)V46: 75KVA 50(30) 225A(150)3.静态测试:1).主芯轴偏转:表针与被测物成90°2).主芯轴孔的偏转:主芯轴孔中装上试棒,主轴旋转3).主心轴孔与刀塔Z轴的平行度:主轴孔内装试棒,表置于刀塔,移动刀塔,试棒长150MM4).主心轴凸圆端面的偏差:5).顶尖偏转:主轴装顶尖,表触于顶尖锥面上,与表成直角,主轴旋转.此项包括主心轴用顶尖及尾座用旋转顶尖6).主心轴及尾座心轴的中心线的高度差:主心轴及尾座间支顶试棒,表放于刀塔上,移动刀塔,测量两端.用200长试棒主轴端低,尾座端高7).尾座心轴中心线与刀塔Z轴中心线的平行度4.动态切削:1.外径切削: 材料:45#φ75×200. 允许公差0.015, 真圆度0.005切削条件:S1200--1500RPM, F0.12 U0.152.顶尾座:材料:45# φ50×300 允许差0.02 真圆度:0.02 切削条件:同上3.端面:材料:FC25(铸铁), φ200或φ300 平坦度0.02(中凹) 端面摆幅:0.005 切削条件:S370 F0.12 4.刀塔重复定位精度:测量长度:150 允许差:±0.0035.刀塔换刀定位精度:360度5次换刀, 指示值的1/2加上±号为测定值. 允许差为±0.003 ±0.0055.接电后检查:1. 主开关ON后,看机台的压力表(夹头,主压力,尾座心轴压力的压力表),主轴马达及电气箱的散热风扇运转正常.若不正常表示相位接反2.强电箱内NFB2 ON后,强电板及轴向卡有电:强电板的过电流保护开关:内部资料严禁外传1NF1 ON:则电源灯亮NF2 ON:则TR1有电源输入(小变压器)NF3 ON:则有110V电源输入NF4 ON :则工作灯有亮NF5 ON:则25,26脚的电压为DC24V NF6 ON :则润滑油泵有电3.压下POWER ON,并在压下紧急停止开关情形下,在诊断画页下确认面板的每个按键均工作正常后打开急停二.G指令:1.G32:直线螺纹G32 Z F F:螺距L1:不完整螺纹. L1=S*P/400 L2:不完整螺纹. L2=S*P/18002.G92:螺纹切削 G92 X(U) Z(W) (R) F ;R:切斜度螺纹,外径为+,内径为- X:第一刀深度Z:车牙长度3.G76:螺纹循环G76 P(M)(R)(A)Q(DMIN)R(D); G76X(U)Z(W)R(I)P(K)Q(D)F(F);M:精加工次数,1--99. R:倒角量 00--99 A:刀尖角度,两位数D:最小切削深度,可用参数0726指定R:精车留量,1/1000MM K:最终螺纹高度, D:第一次切深,半径4.G90:轴向复循环G90 X Z F ;G94:径向复循环 G94 X Z F :5.G71:自动车削复循环 G71 U R ; U:每次切深,半径R:每次提刀量G71 P Q U W F ; U:X精车予留量,半径,内径为负W:Z予留量 G70:精车G70 P Q F ;注:1.G70,G71起点必须一样, 2.循环开始单节必须以G00,X移动,不能有Z移动G01;3.循环中F是精车的4.G71可单独使用,G70不可6.G72:纵向复循环G72 W R ; G72 P Q U W F ;7.G74:Z啄式钻孔G74 R ; G74 X Z P Q F ;R:退刀量P:X\方向每次移动量,半径无正负,钻孔不用Q:Z方向每次切深,无正负单位:1/1000MM8.G75:X轴啄式沟槽循环G75 R ; G75 X Z P Q F ;P:X每次切深,半径值,无正负, 单位:1/1000MMQ:Z每次切移量,让其小于刀宽, 单位:1/1000MM9.G97:用于螺纹切,钻孔,半径段差较小,主轴转速一定 S=1000*V/(3.14*D) S:一定10.G96:主轴线速一定 V:一定11.G50:最高转速设定内部资料严禁外传2第二部分故障排除一.电器故障排除一).AL--1047 TOOL NO.ERROR 数刀SENSOR故障1).检查刀架板,重焊接OK2).试车半小时又复发3).量刀架板电压太低17DCV4).检查继电器板OK5).跳线板M101-29/32至M111-17脚假焊6).重新焊接,测试OK二).刀塔无法旋转原因:110A对64信号线1).查马达上方之电磁阀SOL3A电阻是否为12).查动力线110A对64号是否110V电压3).将断线接妥,测试OK三).刀塔定位后无法再启动原因:定位SENSOR未感应到1).检查DGN16的信号2).发现16.3的信号未感应到3).拆钣金将其调整到有感应四).刀具选择灯不亮原因:RELAY不良1).开机后测试换刀2).刀塔伸出后无法旋转,检查电磁阀是否动作,测量110A,71,72线是否110V3).检查CR7,CR8是否动作4).更换CR7RELAY五).刀塔不定位原因:铁屑造成刀塔SENSOR不良1).检查诊断16信号:X16.0 正常 X16.1一直为1 X16.2正常 X16.3 正常2).正常要感应到才为13).消除SENSOR上铁屑(X16.1的SENSOR)六).AL-414原因:三相电压跳掉1).送电后油压马达动作2).电表量其无3).检查BREAK无跳脱4)再检查外部电压发现BREAK坏常无缘无故自动跳掉七).1070 AL-414原因:LA-AL放电晶体烧坏1).查伺服马达动力线有否断线2).查伺服机对调是否正常内部资料严禁外传33).查中层板放电晶体S3885坏,电阻值太小4).更换S38851070:MACHINE READY ERROR1).TIMER设定错2).RELAY故障3).断线414 SERVO ALARM:X轴DETECT ERR八).AL-414原因:刹车器可变电阻不良1).测试机台原点100%时会发生414AL2).查DGN720无AL3).检查刹车器电压0V4).调整时有时无电压,拆下电阻接点已炭化5).更换电阻OK6).测试原点100%正常九).AL-401:SERVO ALARM(VRDY OFF)原因:POWER SUPPLY不良1).检查110V正常,过载保护器无跳脱2).检查PMC Y48.0-F148.6无信号3).更换POWER SUPPLY OK4).试车OK十).AL-400,AL-408,AL-414,AL-424原因:电源供应模组故障1).检查三相电压2).检查POWER SUPPLY模组的DC 300V输出3).检查POWER SUPPLY模组的DC24V4).判断POWER SUPPLY模组故障,更换OK十一).AL-400,AL-414,AL-424原因:1).Z轴伺服PCB板烧坏2).Z轴伺服全波整流组及伺服功率晶体烧坏3).X轴伺服中层板故障对策: 1).X轴PCB板LV-ALARM灯亮2).Z轴15A的BREAK开关跳脱3).1,2为在客户理发现的问题4).检查Z轴伺服功率晶体短路(烧坏),全波整流组(短路,烧坏) 更换OK5).检查Z轴伺服PCB板故障及放电晶体OK更换基板6).检查X轴伺服PCB板功率晶体,放电晶体全波整流组OK7).检查三相输入电压228,225,2278).检查110\V的电压为1099).CHECK轴向卡OK10).更换X轴伺服中层板,试车OK十二).AL-401原因:油压电磁开关线圈短路1).开机时并无油压动作2).检查油压保护电驿OK3).检查电磁开关线圈短路4).请客户购买3A1A的电磁接触器更换OK 十三).1).未装图形卡 2).车牙90度退刀 3).RCA 4).M65M66相反内部资料严禁外传4对策:1)将MEM卡的CCX5的CONNENCT改至CCX4,改参数909.0,12),3)改参数109为0,907.3为1,916.7为04).将电磁阀的线路对调OK十四).AL1071,408,409,424原因:断线检查线路发现脚踏开关的线路破皮造成漏电十五).AL-945,408原因:串列式子板坏1).更换MEM卡无效2).更换主轴串列式子板OK十六).加工中产生AL930(偶发)原因:主机板故障1).更换轴向卡无效2).更换主机板观察一个月确定正常十七).AL-910原因:IC接触不良1).开机后产生AL-910 2).检查MEM卡,120ROM IC3).将IC拆下,发现IC脚弯曲4).将IC脚打直,重新安装,OK十八).准备不足原因:刀控板(130号)线断1).开机检查诊断21.4无信号2).检查紧急开关正常3).检查X,Z轴极限正常4).量刀控板X轴线路至Z轴线路有断线(130号线--133号线)5).重新压接130号线至刀控板130号端子座6).试车OK十九).X轴无法原点原因:铁屑造成1).检查X16.5讯号永为1 2).拆下X轴侧黑盖板金将铁屑清除3).放大参数700为999999 4).执行原点复归5).将参数700改为100000二十).无法开机原因:记忆卡故障1).查荧幕影象管后方是否有灯亮2).查POWER ON,OFF 动作是否可开机3).查记忆卡CRT线有否断线4).更换记忆卡,测试OK二十一).1).ER2无法开机2).乱刀原因:1).0V,24V短路,自制I/O卡烧毁,FUSE烧毁2).插销磨毁对策:1).将POWER UNIT上之FUSE和I/O卡之FUSE更换OK2).因面板信号已不正常鼓换自制I/O卡,并量其电阻,正常3).0V,24V的电阻158左右,正常4).检查SENSOR电阻正常,SENSOR信号也无误5).检查并整理刀架板OK6).还是无效,但因都是逆转较易无法定位,顾应为插销磨毁二十三).无法开机内部资料严禁外传5原因:电源线路短路1).检查电源线路阻抗2).检查24N线路3).I/O卡线路烧断,IC破裂,RELAY板24N线路短路4).带回厂维修5).维修完毕,安装,开机测试,ER2亮6).检查DGNY10.7为1,检查CR01线路7).检查MCH,MCL1,MCL2电磁开关8).更换MCL2,过载保护器及保险丝5.0A9).试车OK二十四).荧幕无法开启原因:轴向卡不良1).开机后POWER UNIT跳脱亮红灯2).检查POWER UNIT输出电源线路24N,正负15V,5V3).检查24N与0V阻抗值约146欧母,正常,15V与0V短路4).检查电脑各PCB板,轴向卡15V与0V短路5).更换轴向卡,试车OK二十五).荧幕加工时会消失(偶发)原因:荧幕(CRT)不良1).将图形卡CCX4的CONNECT座改至MEM卡之CCX5的CONNECT2).并将图形卡脱离拆下3).测试观察,隔日再发4).量POWER UNIT输出至CRT电压正常5).更换荧幕测试6).隔日未发生二十六).荧幕无显示原因:POWER UNIT故障1).将POWER ON打开,查看POWER UNIT出现红灯ALARM2).检查主机板0V,5V及0V,24N无短路现象3).将POWER UNIT脱离测试结果POWER UNIT出现ALARM4).更换POWER UNIT二十七).银幕无法翻页原因:老鼠咬断M3至荧幕按键信号线1).检查银幕按键正常2).检查MEM卡(M3)至荧幕按键20C的线路有断路3).在输送带接头处有老鼠咬断线路4).重新用开口端子压接20C线路5).测试OK二十八).荧幕无字幕(反黄)原因:MEM卡故障1).将图形卡CCX4的CONNECT座改至MEM卡的CCX5的CONNECT2).并将图形卡脱离3).测试重新开机无效4).将机台做重新INITIAL无效内部资料严禁外传65).更换MEM卡重新INTIAL OK6).重新记忆参数,诊断7).试车OK二十九).操作模式无法转到手动位置(JOG)原因:信号线断一条1).检查DGN10.4,10.5,10.6,10.72).发现10.6的信号无3).检查后发现焊接线脱落,接回OK三十).选择性停止灯不亮原因:断线1).检查客户反应按键可动作但灯不亮2).检查Y82.4的讯号输出OK3).检查按键LED灯OK4).检查跳线板M109-13到M117-13断线,重接,OK三十一).AL-1007(AL-01)原因:接触不良1).检查马达是否真的过热,马达正常2).检查CN2灯CONNECT OK3).检查主轴马达9 PIN的线路正常4).无断线,接回后试车OK三十二)主轴转速失控原因:老鼠咬断线1).手动转速启动时转速成递增至3500RPM2).检查可变电阻1千欧的优劣3).检查主轴模组4).检查JY1至手动可变电阻的线路断线5).重新接妥断线,试车OK三十三).刹车器无法放开原因:端子台上的端子接触不良(松脱)1).检查端子台25,26直流电是否为20V左右,时有时无2).检查电路图,端子9,20,24,25,26发现端子20号在端子台上松脱3).重新固定端子台上的端子,试车OK三十四).1).油压打不上来,2).520AL 3).101AL 4).AL-414 5).X轴异音6).1047AL原因:1).马达转向错误 2).程式当机3).可变电阻不良1).修改线路2).X轴移动时有异音并产生AL4143).检查可变电阻输出电压调整无效4).更换可变电阻OK5).换刀测试OK,观察讯号OK6).可户试车突然产生101 P/SAL7).将PWE=0改为18).将参数46.7,64.4改为1,翻页至诊断修改C9B9的DATA,将之复原为09).将46.7,64.4改为0,试车OK内部资料严禁外传7三十五).油压无动作,轴向无动作原因:保险丝坏1).开机查看故障信号,面板ER1,ER2亮2).查看主轴驱动器上七段显示器所显示故障信号,显示AL-033).检查驱动器,保险丝坏4).R相150A保险丝断,更换保险丝,试车OK三十六).AL-01原因:主轴马达温度检出器坏1).用表量CN2的CONNECT第2,3脚,测得阻抗断路现象2).将CN2第2,3脚短路,开机测试主轴旋转,OK三十七).主轴高档无效原因:桥式整流器坏1).检查桥式整流器阻抗43-110为7欧左右,低档,OK 43-111为10欧左右,高档OK2).将离合器电线拆除,检查整流器输入电压28V OK,输出电压无3).更换整流器,OK三十八).ER1机板 AL-12原因:功率晶体坏1).检查功率晶体必须拆除动力线,这样量比较准确2).采用比较方式,电表转至二极体档,量得结果坏1只3).检查机板做初步判定,保险丝与电晶体若是无坏可直接装上试车,不然就必须更换机板,以免功率晶体又烧坏三十九).主轴无法定位原因:主轴不动,动力线断1).拆主轴盖板金,量测马达为0.3欧,OK2).查看主轴驱动器是否会跳AL,无3).测量主轴马达控制器到马达的动力线W相断4).将W相断线接妥,测试OK四十).当机原因:ER11).查CN2信号线没断线2).查参数设定更正3003.1为0,0.3为0,0.4为13).查外部接线紧急停止24N断线接妥,测试OK四十一).主轴刹车时间过长(约10秒)原因:P TYPE机板烧毁1).检查功率晶体,管状保险丝正常2).量测机板电晶体烧毁,更换机板OK3).量测电压227V正常,试车OK四十二).ER1原因:CONNECT脱落1).检查功率晶体OK 2).检查推动板正常 3).CONNECT接触不良,重新接回,OK 四十三).ER1原因:I/O卡不良1).检查功率晶体,机板正常2).测试时主轴无问题,ER1 LAMP依然亮内部资料严禁外传83).检查ER1 LAMP的灯号线路正常4).拆下I/O卡发现有油渍造成短路5).更换新品,试车OK四十四).主轴刹车无效原因:1)功率晶体烧毁2)管状保险丝烧毁1).检查主轴DRIVER DC,AC管状FUSE,更换烧毁的FUSE2).检查功率晶体,更换不良品3).检查机板推动部分正常,OK四十五).准备不足原因:KEY-BOARD的重置键会卡住1).查EMERGENCY STOP线路是否断线2).查CR01及CR31是否有动作及LED亮3).查为KEY-BOARD重置键会卡住,拆回厂维修,安装OK四十六).暂停键无效原因:按键不良1).检查暂停键讯号X14.6未输入2).检查线路判断不置于诊断线情形3).研判按键不良,更换OK四十七).Z轴无法原点原因:LIMIT99号损坏1).采取原点快速进给无效2).采取手轮方式Z轴可移动3).检查DGN信号X0.1错误4).更换OK四十八).切削水不动作原因:防水接头不良1).检查切削水(强制)是否有信号,信号正常2).检查R,S,T三相是否有输入至电磁开关电压为220V3).检查电磁开关,过载保护器正常4).检查切削水防水接头的电压无220V,欠相,有烧焦现象5).更换OK四十九).AL-1024原因:POT DOWN SENSOR1).检查PMC的AL-1024的信号2).发现6.2,6.3未感应3).AL-1024的AL SENSOR不可两个都感应4).调整到适当位置五十).1).机台无法启动2).按键不良原因:客户接错线路1).开机MACHINE NOT READY,量0V,24N欧姆驱近"0"2).排除面板按键上的0V,24N短路的现象,更换POWER UNIT上的F14 FUSE和I/O卡上的FUSE(5A) OK3).0V,24N电阻为147左右,OK4).将不良按键更换,OK内部资料严禁外传9五十一).尾座带动销无法带动原因:尾座碰杆调整不良1).检查DGN X0.0,X0.1,X0.2,X0.3信号正常2).带动销无法带动,调整碰杆位置,OK3).后拖尾座无误,前拖调整DGN 325 OK五十二).感应不良原因:SENSOR不良1).DGN511---2 2).以手动测试ATC换刀3).检查DGN信号X8.0--X8.3 4).检查SENSOR线路5).更换SENSOR,OK五十三).输送带不动原因:电磁开关坏1).检查110V电压2).检查过载保护器3).检查电磁开关线圈4).更换电磁开关,OK 五十三).换档启动键灯号一直闪烁原因:LIMIT松脱1).测试换档,无法入档2).检查LIMIT线路,24N,102,103,104号线3).拆变速箱板金4).检查LIMIT是否可正常动作5).调整LIMIT高度6).测试换档,检视X2.7,X4.0,X4.1 DGN信号,试车OK五十四).2024 AL(尾座LIMIT信号错误)原因:LIMIT(近接开关)坏1).检查DGN信号2).X17.2正常,X17.3异音,一直为13).更换X17.3上的LIMIT4).调整尾座带动销距离,OK五十五).输送带不走原因:过载保护器烧坏1).查U4,V4,W4导线有无断线2).查防水接头公及母的有没有潮湿烧坏3).查过载保护器有无异味烧坏4).查马达有无短路或开路-0,或23.5或1号5).更换过载保护器,测试OK五十六).工作灯不亮原因:工作灯泡坏1).检查工作灯座有24V电压2).工作灯二段式开关正常3).工作灯线圈断4).更换工作灯炮,试车OK五十七).AL-1047原因:铁屑造成SENSOR感应不良1).手动测试换刀,刀塔伸出,无法旋转内部资料严禁外传102).检查110A,64,65号线路3).检查电磁阀4).检查SENSOR信号,DGN X16.0,X16.1,X16.2,X16.35).刀塔伸出后X16.3保持为1,无法消除6).拆刀塔板金,检查SENSOR7).消除覆盖在SENSOR上的铁屑,试车OK五十八).ATC不动作(马达过热)原因:ATC马达坏1).将马达三相电源线接回2).开机检查ATC马达的刹车器电压在DC99V OK3).接回刹车器电线4).开机测试换刀30分5).用手感应马达没有发热现象,OK五十九).强力切削水不动作原因:U1电源线断线(端子台至连接器)1).检查泵线圈,OK2).检查电磁开关及过载保护器,OK3).检查电磁开关输入侧有220VAC电源(开机中),强力切削按键压下,电磁开关动作但泵不动作4).检查线路发现端子台至马达连接器的U1线路断线5).将普通切削线路(U2,V2,W2)与强力切削线路(U1,V1,W1)对调,测试OK六十).尾座芯轴不动作原因:电磁阀坏1).检查尾座芯轴按键,OK(IN--X18.3,OUT--X18.7)2).检查电磁阀110A--67阻抗32欧姆左右,OK, 110A--66阻抗无穷大坏3).更换电磁阀,OK六十一).刹车时间太长 AL-1012原因:1).修改P6580--40改为50 OK (不可高于55)2).修改D335--1500改为1350,OK (不可低于1000,向客户讲解修改的危险性) 六十二).手动正反转无效原因:参数未开(SPINDLE JOG OK)1).模式在自动执行位置,按正转主轴不转2).由CRT检查PLC图至D688.0断线3).将PWE=0改为1,程式保护键OFF4).将D688.0设定为15).测试OK六十三).无法原点原因:第三代按键面板坏1).检查+X,+Z按键信号,无信号(X20.3,20.1)2).检查面板,其它按键,开关信号OK3).更换第四代面板4).测试按键信号功能,OK六十四).无法连线原因:烧掉一组传输IC 更换第二组传输IC内部资料严禁外传111).I/O—2 2).参数50.0与50.7改13).914.4为1 4).参数250--105).MEM卡的M5插座改至M74六十五).尾座无法带动原因:感应碰块位置跑掉1).查看DGN0.0,0.1,0.2,0.3的信号2).当1101时为正常,看带动销伸出位置(太早)3).将带动杆调紧,直到对准位置,OK六十六).520AL原因:尾座拖过头1).查更改701行程放大无效2).查为尾座极限过行程3).更改参数15号为100 4).将ER2消除尾座往前拖5).更改参数为15号为0 6).测试OK六十七).程式尾座无法完成原因:DGN设定错误1).测试程式2).程式执行至M12或M13后,程式无法继续执行3).检查DGN Y84.0,Y86.7信号4).检查PLC图,因DGN445.2--1,使信号保持住,无法切换5).DGN445.2--0六十八).刚性功牙时会跳准备不足原因:主轴参数(p6500--P6599)不符1).检查Z轴马达,快速进给时不会发生准备不足2).核对Z轴马达参数(P8300--P8399)正确3).核对主轴参数(P6500--P6599)有不符4).此机台是双段P6556需更改981,P6559需更改4189未改之前为P6556--1000,P6559--1000此参数为单段六十九).刀架异常1.刀架旋转不停1).95号的感应不良,诊断16.3为0所致.将板金拆下,调整感应开关,使16.3为12).节流阀有异物,清除即可3).电器问题2.刀架精度:1).X轴方向,量外径公差2丝.2).Z轴方向是刀架刀座面公差2丝3).旋转定位不准:固定刀架的螺帽松;吻合齿轮内的M8×35,8支,M8×45,8支松拆下刀架固紧;吻合齿轮已打到底部,更换;X轴斜销活动面无法吃油;予拉螺帽松所致3.刀架卡刀:1).刀架选1号跳2号2).油量过大3).齿轮间隙大,调偏心轮轴,或调整大齿轮的定位键螺丝松4.油不良问题:油多久未更换,使用的是何种油5.冷机状况下产生先行主轴旋转,使油箱热后,方可旋转七十).荧幕无法开机:1.检查POWET ON/OFF按键是否正常,线路有无开路内部资料严禁外传122.检查POWER SUPPLY 的R.S 相电源是否有输入,电压是否为220A.CP1使用插PIN 方式连接,若PIN 孔受损,强行安装将使PIN 后退,而产生接触不良,造成电压无法输入或电压不足B.POWER SUPPLY 内的VS11(R.S 相突波吸收器)是否遭突波电压袭损3.检查POWER SUPPLY 的RY3,RY4 RELAY 是否内阻过大(RY3,RY5)在动作时, 如火花过大,RELAY 接点将被磨损,而使电流过大4.检查MASTER 上的+5V-0V 是否短路A.假如短路POWER SUPPLY 取下测试正常,一安装至MASTER 测试POWER ON 时,POWER SUPPLY的ALM 红灯亮B.一般可先拆下I/O 卡AXES 卡及MEMORY(M4,M12,M26,M27) 以先排除外部短路5.检查POWER SYPPLY 输出的24V DC 电压是否正常A.检查CP15 PIN 安装是否正确(供应CRT 电源用)B.检查24V 电源是否送至CRT(可拆下CRT 电源线检查)6.检查CRT 的映像管是否有亮光(在正常的CRT 输入24V 电源后,映像管应微微亮,否则CRT 坏) 七十一).荧幕出现准备不足:1.检查荧幕上是否有故障,2.是否是过硬体极限所致3.检查RELAY 板上的CR31是否有动作,一般在ESP 放开后,CR31 RELAY 将动作,否则在CR31线路上必有断路4.按CONTROL ON 键,是否能READY,如可,POWER ON TIMER 设没定时间可能太长,依正确输入七十二).X 轴可移动Z 轴无法移动:1.检查油压马达是否动作,压力是否足够2.检查尾座带动开关检出环是否脱落,无法检出,尾座带动杆,动作时力量很大,常使带动开关检出环的SET螺丝脱落而无法检出,可在带动杆上攻牙,使杆与环成为一体3.检查尾座行程LIMIT 是否被检出(会产生520报警)内部资料 严禁外传13七十三).510 ALARM(+X 过行程)发生原因可由X 轴机械坐标值判断1.机械坐标值大于参数700,此为原点检出SENSOR 检出不良或X 轴跳PITCH,调整SENSOR 或重校X轴安全距离2.机械坐标值小于参数700,此为机械关机时,X 轴滑落引起,可先放大参数700,再原点,在原点位置压ESP观察X 轴滑落情形,正常情形为压下ESP,X 轴电源切断与刹车器开始动作有一个时间差,会造成X 轴轻微下滑,当刹车器动作后,即停止滑落.滑落值太大或一直滑落为刹车器故障,而完全没有滑落,则为加工中,刹车器根本未动作,亦为不正常七十四).520 ALARM可由Z 轴机械坐标值或移动判断1.机械坐标值大于参数701, 此为原点检出SENSOR 检出不良或Z 轴跳PITCH,调整SENSOR 或重校X轴安全距离2.Z 轴只能前进,不能后退,此为尾座后退极限被尾座碰块感应引起,一般为将参数15.2设定为1(+Z 过行程无效),将Z 轴原点,再将尾座带至机械中央,参数15.2设定为0,再将尾座带回.(也可拆除尾座过行程碰块)七十五).一般故障:1.开机后READY 即产生ER2而无其他故障:START 按键卡住为1,让机械误判为未原点即执行程式2.程式执行至M03无法往下执行:A.安全门是否锁紧 C.未输入S 转速指令B.夹头监视灯是否动作 D.检查正反转按钮指示灯是否亮3.程式执行至M03产生ER2:A.检查夹头监视时间是否太短(当夹头开始动作至按下启动键时间快于夹头监视时间(一般设定为1.5秒),即产生ER2,勿任意更改此参数,以免工件飞出B.电池松动,荧幕下方出现BAT ALARM4.部分M 机能无效:同一程式单节中有两个以上M 机能,后面M 机能无效5.主轴转速不稳定:A.主轴速度检出器皮带是否太松B.DRIVER 参数设定错误C.DA2输入电压不稳定:CR15(手动/自动)RELAY A OR B 内阻过大,VR1可]变电阻故障;M26-7与CN1-31线路间内阻过大D.PCB 的VCMD 漂移过大(需更换PCB)2-20接地不良或未接F.速度检出器故障G.使用G96机能未消除H.轴向移动引起转速变化七十六).活动门太紧的处理:1.除污片太紧的处理:将活动门处的除污片拆除后拉活动门看是否还太紧,如已松了则一片一片装回看装到哪一块变紧将此片除污片处理2.底部滑轮与滑轨干涉:一般拆除除污片后后如还是太紧可将门拆下看下面轮子是否有干涉,一般干涉为轮子的两边可用车床将他车掉一点.二.机械故障排除:内部资料 严禁外传14 一).尾座不良讯号:1.尾座无法带动:A.过极限,改参数15.2B.尾座强制,将Z 轴以手动摇至芯轴带动处,将尾座强制带动C.将尾座底的极限板金拆除,再将尾座带动至负方向再至正方向,板金复原且不要碰到极限开关2.Z轴无法移动至原点:检查尾座的诊断0.0无变1所致,调整尾座芯轴的带动芯轴下方的近接开关,开关接触不良3.尾座无法带动:芯轴的近接开关的诊断0.1无变1所致,与(2)相同处理二)常用动作:各轴的安全距离调整, 中心距的调整, 头部的调整,X轴的拆装常识,刀架的拆装精度调整, 吃油太凶的维修, 润滑泵的清洁无压力的基本调整三)车床的基本调整精度:1.刀架X轴方向精度为±0.022.刀架Z轴方向精度为±0.023.头部精度100L+0.01,200L+0.0154.中心钻A.快速夹为例4.0中心钻+0.1内 B.成形夹为例4.0中心钻+0.2内5.中心补正标准补法:比中心点大为负,加原508的数值例:508中原为-750.0,机械坐标测为-221.5,中心点为-220.0,则221.5-220.0=1.5,比中心点大,则508中补为-1500-750=-22506.尾座的调整为:200L的两顶心切削为0.015,300L为0.02以内PS:尾座的工件夹持需工件的20MM内夹持为正确,调整后检查尾座芯轴伸出精度,为Z轴负方向开始至正方向其芯轴精度为0.015以内,必须负方向高于正方向,其作用为顶刀用四).中心调整:1.将X轴移至中心位置:V16,20为-220.0, V26为-360.0, V36为-540.0, V46为-610.02.表针压在内径刀座内3.调整X轴上下移动至45º,床轨方向上下的读数基本一致4.读出此时X轴坐标位置,得出中心点差值5.修改参数508,关机重开6.调整安全距离五).主轴异音:1.工具:千分表,六角扳手,铁锤,錾子,夹头扳手,活动扳手,一字起子,黄油2.判断方法: 1).去除检出皮带检查是否检出器异音2).去除主轴皮带检查主轴马达或主轴异音3).去除油压缸旋转主轴检查油压缸是否异音3.更换方法: 1).利用夹头扳手将拉杆与夹头分离(在放松,拉紧状况时)2).在拉杆拉的情况下去除夹头6根固定螺丝,拆除夹头3).X.Z退到原点4).关机,去除回转缸,油管及回油5).去除盛水槽6).去除连接板与回转缸固定螺丝7).拉出回转缸8).去除主轴皮带及检出器皮带9).放松<图一>螺帽后将连接板去除10).将<图二>螺帽去除(须先放松三个固定螺丝)拉出皮带轮11).<图三>螺母去除,及<图四>22螺丝去除内部资料严禁外传1512)拉出主轴4.安装方法: 1).擦净主轴及箱体本身,接触后涂黄油2).装入箱体内,锁紧<图四>22螺丝(图五有一排水口须向下)3).将<图二>螺帽敲紧.4).齿形皮带轮及皮带轮内孔涂黄油后装入主轴(皮带轮倒角较大的与齿形带接触5).<图二>螺帽敲紧三个固定螺丝锁紧(螺纹部分涂黄油)6).<图一>螺母先选入主轴内连接板敲紧7).<图一>螺母敲紧以压紧连接板8).量表量连接板与回转缸接触面跳动0.01~0.039).将螺母固定螺丝锁紧10).装皮带及检出皮带11).装上回转缸测其光滑面精度在0.02以内(先锁上3根螺丝以锤敲35处,如表回乱跳表示锁的不紧,不会跳表示锁的太紧12).3根螺丝锁紧后将其他螺丝锁紧13).锁上油管,回油管,盛水槽座开机,检查是否漏油14).将主轴及夹头锥度接触面擦净后先用3根螺丝将主轴固定在主轴上15).利用夹头拆除扳手将夹头与拉杆连接16).在夹头夹的情况下量其精度17).锁上小黑盖,及<图七>54螺丝,试运转注:1.各接触面不可有毛边,并保持清洁2.螺纹处涂黄油六).Z轴异音:1.Z轴后培林不良:1).拆除后伸缩护板2).将螺帽放松3).用快速移动Z轴看是否还有声音,如没有表示后培林损坏2.Z轴前培林不良1).一般如果后培林没坏而移动时还有声音则有可能前培林损坏2).将传动箱上黑盖拆除3).将Z轴伺服马达拆下试转有无异音(先将马达与球螺杆作记号)4)拆除予压盖5).用手将球螺杆旋出来(此时不可硬转)6).将固定螺帽敲除,培林拆下(如黄油变成不是白色的就是已经损坏,拆下时须注意三个培林的方向性)7).更换后按方向装回3.大档板及伸缩护板不良1).大档板异音:A.检查除污片是否有坏B.检查大档板是否撞到Z轴伺服马达,如有可调整大档板后面与一块白色耐磨塑料尼龙2).伸缩护板异音:A.检查是否积屑或润滑不良B.调整伸缩护板固定螺丝在最佳状况七).V-36 X轴上下培林及刹车器更换步骤A.工具及料件:内部资料严禁外传16。
数控NC代码及解释

常用数控编程代码以及解释1、编程主代码功能G代码功能通过编程并运行这些程序而使数控机床能够实 G00 定位(快速移动) G01 直线插补(进给速度)G02 顺时针圆弧插补各进给轴的运动,如直线圆弧插补、进给控制 G03 逆时针圆弧插补 G04 暂停,精确停止G09 精确停止现的功能我们称之为可编程功能。
一般可编程 G17 选择X Y平面 G18 选择Z X平面G19 选择Y Z平面各进给轴的运动,如直线圆弧插补、进给控制 G27 返回并检查参考点 G28 返回参考点G29 从参考点返回现的功能我们称之为可编程功能。
一般可编程 G30 返回第二参考点 G40 取消刀具半径补偿G41 左侧刀具半径补偿功能分为两类:一类用来实现刀具轨迹控制即 G42 右侧刀具半径补偿 G43 刀具长度补偿+G44 刀具长度补偿-现的功能我们称之为可编程功能。
一般可编程 G49 取消刀具长度补偿 G52 设置局部坐标系G53 选择机床坐标系通过编程并运行这些程序而使数控机床能够实 G54 选用1号工件坐标系 G55 选用2号工件坐标系G56 选用3号工件坐标系各进给轴的运动,如直线圆弧插补、进给控制 G57 选用4号工件坐标系 G58 选用5号工件坐标系G59 选用6号工件坐标系现的功能我们称之为可编程功能。
一般可编程 G60 单一方向定位 G61 精确停止方式G64 切削方式通过编程并运行这些程序而使数控机床能够实 G65 宏程序调用 G66 模态宏程序调用G67 模态宏程序调用取消各进给轴的运动,如直线圆弧插补、进给控制 G73 深孔钻削固定循环 G74 反螺纹攻丝固定循环G76 精镗固定循环现的功能我们称之为可编程功能。
一般可编程 G80 取消固定循环 G81 钻削固定循环G82 钻削固定循环各进给轴的运动,如直线圆弧插补、进给控制 G83 深孔钻削固定循环 G84 攻丝固定循环G85 镗削固定循环1 可编程功能 G86 镗削固定循环 G87 反镗固定循环G88 镗削固定循环功能分为两类:一类用来实现刀具轨迹控制即 G89 镗削固定循环 G90 绝对值指令方式G91 增量值指令方式现的功能我们称之为可编程功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
−0.5V to +6V −0.5V to +6V −0.5V to +6V −50 mA +20 mA −50 mA +20 mA ±50 mA ±50 mA −65°C to +150 °C
150 °C
Recommended Operating Conditions (Note 2)
Supply Voltage Operating (VCC) Supply Voltage Data Retention (VCC) Input Voltage (VIN) Output Voltage (VOUT) Operating Temperature (TA) Thermal Resistance (θJA) SOT23-5 SC70-5 300°C/W 425°C/W 1.65V to 5.5V 1.5V to 5.5V 0V to 5.5V 0V to VCC
© 2003 Fairchild Semiconductor Corporation
DS012176
元器件交易网
NC7SZ14
Absolute Maximum Ratings(Note 1)
Supply Voltage (VCC ) DC Input Voltage (VIN) DC Output Voltage (VOUT) DC Input Diode Current (IIK) @VIN < −0.5V @VIN > 6V DC Output Diode Current (IOK) @VOUT < −0.5V @VOUT > 6V, VCC = GND DC Output Current (IOUT) DC VCC/GND Current (ICC/IGND) Storage Temperature (TSTG) Junction Temperature under Bias (TJ) Junction Lead Temperature (T1); (Soldering, 10 seconds) Power Dissipation (PD) @ +85°C SOT23-5 SC70-5 200 mW 150 mW 260 °C
General Description
The NC7SZ14 is a single Inverter with Schmitt Trigger input from Fairchild’s Ultra High Speed Series of TinyLogic. The device is fabricated with advanced CMOS technology to achieve ultra high speed with high output drive while maintaining low static power dissipation over a very broad VCC operating range. The device is specified to operate over the 1.65V to 5.5V VCC range. The input and output are high impedance when VCC is 0V. Inputs tolerate voltages up to 6V independent of VCC operating voltage.
2
元器件交易网
NC7SZ14
DC Electrical Characteristics
Symbol VOL Parameter LOW Level Output Voltage VCC (V) 1.65 1.8 2.3 3.0 4.5 1.65 2.3 3.0 3.0 4.5 IIN IOFF ICC Input Leakage Current Power Off Leakage Current Quiescent Supply Current 0 to 5.5 0.0 1.65 to 5.5
Features
s Space saving SOT23 or SC70 5-lead package s Ultra small MicroPak leadless package s Ultra High Speed; tPD 3.7 ns Typ into 50 pF at 5V VCC s High Output Drive; ±24 mA at 3V VCC s Broad VCC Operating Range; 1.65V to 5.5V s Matches the performance of LCX when operated at 3.3V VCC s Power down high impedance inputs/output s Overvoltage Tolerant inputs facilitate 5V to 3V translation s Patented noise/EMI reduction circuitry implemented
−40°C to +85°C
Note 1: Absolute maximum ratings are DC values beyond which the device may be damaged or have its useful life impaired. The datasheet specification should be met, without exception, to ensure that the system design is reliable over its power supply, temperature, and output/input loading variables. Fairchild does not recommend operation outside datasheet specifications. Note 2: Unused inputs must be held HIGH or LOW. They may not float.
Unit
Conditions
Min
Typ 0.0 0.0 0.0 0.0 0.0 0.08 0.10 0.15 0.22 0.22
AC Electrical Characteristics
Symbol tPLH, tPHL Parameter Propagation Delay VCC (V) 1.65 1.8 2.5 ± 0.2 3.3 ± 0.3 5.0 ± 0.5 tPLH, tPHL CIN CPD Input Capacitance Power Dissipation Capacitance Propagation Delay 3.3 ± 0.3 5.0 ± 0.5 0 3.3 5.0 Min 2.0 2.0 1.0 1.0 0.5 1.5 0.8 TA = +25°C Typ 9.1 7.6 5.0 3.7 3.1 4.4 3.7 4 24 30 Max 15.0 12.5 9.0 6.3 5.2 7.2 5.9 TA = −40°C to +85°C Min 2.0 2.0 1.0 1.0 0.5 1.5 0.8 Max 15.6 13 9.5 6.5 5.5 7.5 6.2 ns pF pF (Note 3) Figure 2 CL = 50 pF, RL = 500Ω Figures 1, 3 ns CL = 15 pF, RL = 1 MΩ Figures 1, 3 Unit Conditions Figure Number
DC Electrical Characteristics
Symbol VP Parameter Positive Threshold Voltage VCC (V) 1.65 1.8 2.3 3.0 4.5 5.5 VN Negative Threshold Voltage 1.65 1.8 2.3 3.0 4.5 5.5 VH Hysteresis Voltage 1.65 1.8 2.3 3.0 4.5 5.5 VOH HIGH Level Output Voltage 1.65 1.8 2.3 3.0 4.5 1.65 2.3 3.0 3.0 4.5 Min 0.6 0.7 1.0 1.3 1.9 2.2 0.2 0.25 0.40 0.6 1.0 1.2 0.1 0.15 0.25 0.4 0.6 0.7 1.55 1.7 2.2 2.9 4.4 1.29 1.9 2.4 2.3 3.8 TA = +25°C Typ 1.0 1.1 1.4 1.75 2.45 2.9 0.5 0.55 0.75 1.0 1.43 1.70 0.48 0.54 0.65 0.77 1.01 1.18 1.65 1.8 2.3 3.0 4.5 1.52 2.15 2.80 2.68 4.20 Max 1.4 1.5 1.8 2.2 3.1 3.6 0.8 0.9 1.15 1.5 2.0 2.3 0.9 1.0 1.1 1.2 1.5 1.7 TA = −40°C to +85°C Min 0.6 0.7 1.0 1.3 1.9 2.2 0.2 0.25 0.40 0.6 1.0 1.2 0.1 0.15 0.25 0.4 0.6 0.7 1.55 1.7 2.2 2.9 4.4 1.29 1.9 2.4 2.3 3.8 V IOH = −4 mA IOH = −8 mA IOH = −16 mA IOH = −24 mA IOH = −32 mA V VIN = VIL IOH = −100 µA Max 1.4 1.5 1.8 2.2 3.1 3.6 0.8 0.9 1.15 1.5 2.0 2.3 0.9 1.0 1.1 1.2 1.5 1.7 V V V Unit Conditions
(Continued)
TA = +25°C TA = −40°C to +85°C Max 0.1 0.1 0.1 0.1 0.1 0.24 0.3 0.4 0.55 0.55 ±1 1 2.0 Min Max 0.1 0.1 0.1 0.1 0.1 0.24 0.3 0.4 0.55 0.55 ±10 10 20 µA µA µA V IOL = 4 mA IOL = 8 mA IOL = 16 mA IOL = 24 mA IOL = 32 mA VIN = 5.5V, GND VIN or VOUT = 5.5V VIN = 5.5V, GND V VIN = VIH IOL = 100 µA