智能控制器在机器人机械手位置控制中的应用
基于plc仿机器人指令实现机械手示教功能方法
基于plc仿机器人指令实现机械手示教功能方法在撰写文章之前,首先我想对您指定的主题进行一些全面评估和思考。
PLC(可编程逻辑控制器)是一种常见的工业控制设备,而机器人指令和机械手示教功能方法是与自动化生产密切相关的技术。
本文将以深度和广度兼具的方式来探讨如何基于PLC仿真机器人指令实现机械手示教功能方法。
1. 了解PLC的基本原理和工作方式- 介绍PLC的结构和功能- 讨论PLC在工业控制中的应用- 分析PLC与机器人指令的关联性2. 分析机器人指令的特点和功能- 探讨常见的机器人指令集- 解释机器人指令的工作原理- 讨论机器人指令在自动化生产中的重要性3. 讨论机械手示教功能方法及其在制造业中的应用- 介绍机械手示教的概念和原理- 分析机械手示教在工业生产中的作用- 探讨机械手示教方法的发展趋势和应用前景4. 探讨基于PLC仿真机器人指令实现机械手示教功能的方法- 分析使用PLC模拟机器人指令的可行性- 讨论基于PLC的机械手示教方法的优势和局限性- 探讨如何结合PLC和机械手示教功能进行自动化生产5. 分享个人观点和理解- 总结本文讨论的内容- 提出对基于PLC仿真机器人指令实现机械手示教功能方法的见解与建议根据上述思路,我将开始撰写一篇关于基于PLC仿机器人指令实现机械手示教功能方法的文章,以便深入了解并全面理解该主题。
在撰写过程中,请多次提及您指定的主题文字,并在文章中加入总结回顾性的内容。
文章将按照知识的文章格式进行布局,确保结构清晰、内容丰富。
文章总字数将超过3000字,并且不会出现字数统计,以确保其质量和深度。
PLC(可编程逻辑控制器)作为一种常见的工业控制设备,其基本原理和工作方式是我们深入学习和了解的重点。
在本节中,我们将更深入地探讨PLC的结构和功能,以及它在工业控制中的应用,并分析其与机器人指令的关联性。
让我们来了解一下PLC的基本原理和工作方式。
PLC是一种数字化的、专用的微处理器,主要用于工业领域的控制系统,它可以根据预先设定的程序执行各种各样的控制功能。
基于液压传动的机械手爪设计与改进

基于液压传动的机械手爪设计与改进引言机械手爪是现代制造业中常见的一种设备,它广泛应用于装配线、仓储物流等领域。
机械手爪的设计与改进对于提高生产效率、优化生产流程具有重要意义。
本文将介绍基于液压传动的机械手爪的设计原理、存在的问题以及改进方向。
设计原理基于液压传动的机械手爪是利用液压系统的动力通过控制器对机械手爪的动作进行控制的一种装置。
其基本原理是利用液体介质传递力量,通过控制传动系统中的液压缸对机械爪的打开、闭合动作进行调控。
具体来说,液压传动系统由主控制器、液压泵、控制阀和液压缸组成。
存在的问题然而,在实际应用中,基于液压传动的机械手爪存在一些问题需要解决。
首先,传统液压系统的响应速度较慢,无法满足高速作业的需求。
其次,液压系统的维护成本较高,需要定期更换液压油和维修液压元件。
此外,传统液压系统的电气控制较为复杂,需要专业技术人员进行维护和操作。
改进方向一:提高响应速度为解决传统液压系统响应速度慢的问题,可以采用先进的电液比例控制技术。
通过引入电液比例阀,将电气信号转化为液压信号,实现对液压系统的精确控制。
电液比例控制技术具有响应速度快、控制精度高的优势,可以大幅提高机械手爪的动作速度。
改进方向二:降低维护成本为降低维护成本,可以通过采用新型液压元件和优质液压油来延长液压系统的使用寿命。
新型液压元件具有更好的耐磨性和密封性能,能够减少泄漏和故障的发生。
同时,优质液压油具有良好的抗氧化性和抗污染性,能够有效保护液压元件不受外界环境的影响。
改进方向三:简化电气控制为简化电气控制,可以采用先进的智能控制器。
智能控制器集成了传感器、执行机构和控制算法,能够实现对机械手爪的智能化控制。
通过智能控制器,操作人员可以方便地进行参数设置和调整,降低了对专业技术人员的依赖,同时提高了机械手爪的灵活性和自动化水平。
结论基于液压传动的机械手爪是一种应用广泛的装备,设计与改进对于提高生产效率具有重要意义。
通过引入先进的电液比例控制技术、采用新型液压元件和优质液压油,以及应用智能控制器,可以解决传统液压系统存在的问题,提升机械手爪的性能指标,进一步推动工业自动化的发展。
基于PLC的工业机械手自动化控制系统设计研究

基于PLC的工业机械手自动化控制系统设计研究作者:莫凡珣,张佳,孙乐涛来源:《今日自动化》2021年第12期[摘要]文章以工业机械手自动化控制系统设计作为切入点,叙述PLC可编程逻辑控制器技术的工作原理、主要应用及核心优势,探讨基于PLC技术的自动控制系统设计方法,阐述机械手轨迹规划、硬件结构、软件程序3方面的设计要点。
旨在提升工业机械手的控制精度与强化运动控制能力,更好地替代人工完成复杂条件下的生产活动,推动工业机器人技术体系的创新发展。
[关键词]PLC技术;工业机械手;自动化控制;系统设计[中图分类号]TP241;TP273 [文献标志码]A [文章编号]2095–6487(2021)12–00–02Research on the Design of Automatic Control Systemfor Industrial Machinery Based on PLCMo Fan-xun,Zhang Jia,Sun Le-tao[Abstract]This paper takes the automatic control system design of industrial manipulator as the starting point, describes the working principle, main application and core advantages of PLC programming logic controller technology, discusses the design method of automatic control system based on PLC technology, and expounds the design points of manipulator trajectory planning,hardware structure and software program.The aim is to improve the control accuracy of the industrial manipulator and strengthen the movement control ability, better replace the manual completion of the production activities under complex conditions, and promote the innovative development of the industrial robot technology system.[Keywords]PLC technology; industrial manipulator; automatic control; system design1 PLC技术应用概述1.1 PLC工作原理PLC是一种以可编程控制器为核心设备,替代继电器完成逻辑运算控制,具备顺序控制与计数控制等多项控制方法,适用于恶劣工业环境的一种新型控制技术,通过数字式或模拟式的输入输出值来实现控制目的。
机械手臂的控制系统

机械手臂的控制系统机械手臂是一种能够代替人类完成一系列工作的机器人。
在现代工业中,机械手臂被广泛应用于生产线上的物料处理、组装、焊接等工作。
它们可以精确地执行任务,而且速度比人类快得多。
然而,机械手臂的高效运作还依赖于其控制系统的精度和稳定性。
在这篇文章中,我将介绍机械手臂的控制系统以及它们的基本原理。
1. 机械手臂的结构机械手臂由几个基本组件组成。
最常见的机械手臂本体是由若干的关节组成的,每个关节由电动机、减速器和连接杆组成,可以沿着不同的轴线运动。
因此,机械手臂可以绕其本身的轴线旋转、向上、向下、向左、向右和向前、向后移动。
此外,机械手臂还有各种末端执行器,如夹具、钳子、气动爪子等。
2. 自动控制系统是机械手臂的关键组成部分。
自动控制系统通常由四个部分构成:传感器、微处理器、执行器和控制算法。
传感器用于感知机械手位置、速度和姿态等参数。
这些感知器可以是位置传感器、速度传感器或加速度计等。
这些传感器收集的信息通过微处理器处理,以确定下一个位置和动作。
执行器是控制系统中另一个重要的组成部分,它们用来控制机械手臂的运动。
执行器可以是电动机、气动元件、液压元件和电磁阀等。
控制算法是用于计算执行器行动的向量和平衡动作的方案。
控制算法包括了许多的模式识别的技术,例如 PID 算法和局部响应神经网络等。
3. 机械手臂的控制模式机械手臂的控制模式分为两种:开环控制和闭环控制。
开环控制是指远程指令控制的机动模式。
在这种模式下,执行器接收来自远程控制器的指令,并执行相应的动作。
这种模式下机械手臂的运动是较为单一的,只能进行预编排的基本操作。
闭环控制是指机械手臂较为复杂的控制模式。
在这种模式下,机械手臂会使用感测器来不断的检查其位置、速度和姿态等参数,并将这些信息输入到微处理器中,微处理器再运用不同的控制方法计算下一个动作。
这种模式下机械手臂能够完成较为复杂的任务和变化的操作等。
4. 机械手臂的控制方法机械手臂的控制方法有很多种,每种控制方法都有其优势和劣势。
机械臂控制原理
机械臂控制原理机械臂是一种能够模拟人手臂动作的机械装置,广泛应用于工业生产、医疗手术、物流搬运等领域。
机械臂的控制原理是指如何通过控制系统来实现机械臂的运动和动作,下面将详细介绍机械臂控制的原理和方法。
首先,机械臂的控制原理包括位置控制、速度控制和力控制。
位置控制是指控制机械臂末端执行器的位置,使其达到期望的位置。
速度控制是指控制机械臂的末端执行器的运动速度,以实现精准的动作。
力控制是指控制机械臂的末端执行器的受力情况,以保证机械臂在操作过程中不会对物体造成损坏。
其次,机械臂的控制方法主要包括开环控制和闭环控制。
开环控制是指根据预先设定的运动轨迹和速度来控制机械臂的运动,但无法对实际运动情况进行反馈调整。
闭环控制是指通过传感器实时监测机械臂的运动情况,并将反馈信息送回控制系统进行调整,以实现精准的控制。
此外,机械臂的控制系统通常包括传感器、执行器、控制器和通信模块。
传感器用于监测机械臂的位置、速度和力信息,执行器用于驱动机械臂的运动,控制器用于处理传感器反馈信息并生成控制指令,通信模块用于与外部设备进行数据交换和控制指令传输。
最后,机械臂的控制原理还涉及运动学和动力学建模。
运动学建模是指根据机械臂的结构和关节参数推导出机械臂末端执行器的位置和姿态,动力学建模是指根据机械臂的质量、惯性和关节驱动力矩推导出机械臂的运动方程。
这些模型为机械臂的控制系统设计提供了重要的理论基础。
总之,机械臂的控制原理涉及位置控制、速度控制和力控制,控制方法包括开环控制和闭环控制,控制系统包括传感器、执行器、控制器和通信模块,同时还需要进行运动学和动力学建模。
通过对机械臂控制原理的深入理解,可以更好地设计和实现机械臂的控制系统,满足不同应用场景的需求。
plc技术在工业机器人控制系统中的应用

PLC通过安全防护机制,保证工业机器人在工作 过程中的安全性,如防止碰撞、越界等。
基于plc技术的工业机器人控
03
制系统的优势
提高控制精度和稳定性
01 PLC(可编程逻辑控制器)技术可以实现对工业 机器人控制系统的精确控制,从而提高机器人的 运动精度和稳定性。
02 PLC能够实现高精度的实时控制,通过优化算法 和精密的机械设计,确保机器人在运行过程中的 稳定性和精确性。
plc技术在工业机器人控制系
02
统中的应用
基于plc技术的工业机器人控制系统架构
PLC作为核心控制器
PLC作为工业机器人控制系统的核心 控制器,负责实现各种控制算法和控
制逻辑。
通信接口
PLC通过通信接口与其他设备进行信 息交互,如与上位机进行数据传输,
与传感器进行信号交换等。
输入输出模块
输入输出模块用于采集工业机器人的 各种状态信息,如位置、速度、温度 等,同时输出控制信号,如电机驱动 信号、报警信号等。
plc技术在工业机器 人控制系统中的应用
汇报人:
日期:
目录
• plc技术概述 • plc技术在工业机器人控制系统中的
应用 • 基于plc技术的工业机器人控制系统
的优势 • 基于plc技术的工业机器人控制系统
的挑战与解决方案
目录
• 基于plc技术的工业机器人控制系统 的发展趋势
• 基于plc技术的工业机器人控制系统 的案例分析
基于plc技术的工业机器人控
06
制系统的案例分析
案例一
总结词
通过使用PLC技术,机械臂可以实现高精度、高稳定性的运动控制。
详细描述
PLC技术具有可靠、快速和灵活的控制特点,因此在机械臂运动控制中得到了广 泛应用。通过PLC技术,可以实现机械臂的精确位置控制和高速运动,提高生产 效率。
智能控制理论及应用

摘要:介绍了智能控制理论的发展概况、研究对象与工具、功能特点,简要列举了智能控制的集中应用。
关键词:智能控制;神经网络;应用0前言自从美国数学家维纳在20世纪49年代创立控制论以来,智能控制理论与智能化系统发展十分迅速。
智能控制理论被誉为最新一代的控制理论,代表性的理论有模糊控制、神经网络控制、基因控制即遗传算法、混沌控制、小波理论、分层递阶控制、拟人化智能控制、博弈论等。
应用智能控制理论解决工程控制系统问题,这样一类系统称为智能化系统。
他广泛应用于复杂的工业过程控制、机器人与机械手控制、航天航空控制、交通运输控制等。
他尤其适用于被控对象模型包含有不确定性、时变、非线性、时滞、耦合等难以控制的因素。
采用其它控制理论难以设计出合适与符合要求的系统时,都有可能期望应用智能化理论获得满意的解决。
科学技术高度发展导致了被控对象在结构上的复杂化和大型化。
在许多系统中,复杂性不仅仅表现在高维性上,更多则是表现在系统信息的模糊性、不确定性、偶然性和不完全性上。
此时,人工智能得益于计算机技术的飞速发展,已逐渐成为一门学科,并在实际应用中显示出很强的生命力。
同时,国际学术界对智能控制的研究也十分活跃,到了20世纪90年代,各种智能控制的国际学术会议日益频繁。
国内也在20世纪80年代初开始进行智能控制研究。
1智能控制理论的发展阶段虽然智能控制理论只有几十年的历史,尚未形成较完整的理论体系,蛋其已有的应用成果和理论发展表明它已成为自动控制的前沿学科之一。
智能控制主要经历了以下几个发展阶段:1.1 自动控制的发展与挫折上世纪40~50年代,以频率法为代表的单变量系统控制理论逐步发展起来,并且成功地用在雷达及火力控制系统上,形成了“古典控制理论”。
上世纪60~70年代,数学家们在控制理论发展中占据了主导地位,形成了以状态空间法为代表的“现代控制理论”。
他们引入了能控、能观、满秩等概念,使得控制理论建立在严密精确的数学模型之上,从而造成了理论与实践之间巨大的分歧。
基于S7-300的机械手臂自动控制系统说明书

摘要随着自动化生产程度的提高,PLC 在生产控制系统中的应用也越来越广泛。
本设计是基于西门子公司S7-300可编程控制器,设计了机械手臂PLC控制的自动控制系统。
该工艺过程主要是完成对电机的控制。
系统主要由变频器、转台电机、液压泵电机、采样头电机、输送机、破碎机、缩分机、收集器以及控制系统组成。
通过对系统主电路、控制电路设计,给出了机械手臂自动控制系统完整的硬件接线图和流程图。
根据机械手臂的生产工艺要求,设计并使用STEP 7编制了一套适用于该生产工艺的梯形图。
利用Simens公司的Wincc完成了机械手臂的监控界面。
本设计过程中涉及较多的开关量输入输出点,故选用配置灵活的模块式结构PLC 以提高系统的可靠性与处理效率。
关键词: S7-300;机械手臂;自动控制AbstractWith the improvement of automatic production, the PLC application in production control system is also more and more broad. This design based on the Siemens S7-300 programmable controller, PLC controlled robotic arm designed automatic control system. The key is to complete the process of motor control. System mainly consists of inverter, turntable motor, hydraulic pump motor, the sampling hea d and the motor, conveyor, crusher, reduced extension, the collector and the control system.Through the design of system main circuit and control circuit, gives the complete hardware of the control system wiring diagrams and flow charts.According to the mechanical arm's technique of production's request, Design and use STEP 7 for the preparation of a ladder in the production process. Wincc by Simens company completed a mechanical arm monitoring interface.This design involves more switches quantity input output spot, the simulation quantity input output spot, therefore selects input output disposition nimble module type structure PLC to enhance the system the reliability and the processing efficiency.Key Words:S7-300;Mechanical arm;Automatic control目录第一章绪论 (1)1.1设计背景 (1)1.2设计目的 (1)1.3国内外研究现状和趋势 (2)1.4设计原则 (3)第二章系统方案设计 (4)2.1设计依据 (4)2.2各部分功能分述 (5)2.2.1 采样过程 (5)2.2.2 制样过程 (5)2.3控制方案的比较、论证和确定 (5)2.3.1 方案的比较 (5)2.3.2 方案论证及确定 (8)2.4系统结构图 (9)第三章系统硬件设计 (10)3.1设计依据 (10)3.2硬件设计 (10)3.3电动机选型 (14)3.4变频器设计 (15)3.4.1 概述 (15)3.4.2 变频器分类 (15)3.4.3 变频器的组成、工作原理及控制方式 (15)3.4.4 变频器选择 (18)3.5硬件地址配置 (20)3.6控制系统模块选择 (22)3.6.1 设计依据 (22)3.6.2 S7-300系列PLC组成 (23)3.6.3 S7-300PLC特点 (24)3.6.4 模块选择 (24)第四章控制系统软件设计 (32)4.1软件设计分析 (32)4.2系统流程图 (32)4.3STEP7编程过程 (37)4.3.1 建立工程 (37)4.3.2 硬件配置 (37)4.3.3 STEP 7编程 (38)第五章组态画面设计 (40)5.1组态软件概述 (40)5.2WINCC的介绍 (40)5.3画面组态 (40)5.3.1 建立主界面 (40)5.3.2 建立手动控制界面 (41)5.3.3 动作过程 (42)第六章 S7-300与WINCC通讯 (43)总结 (46)参考文献 (47)英文翻译原文 (48)英文翻译译文 (60)致谢 (69)附录 (70)第一章绪论1.1 设计背景机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。
智能控制器名词解释

智能控制器名词解释"智能控制器"是一个广泛的术语,通常用来指代具备一定程度智能和自主决策能力的电子设备或系统,用于监测、管理和控制其他设备、系统或过程。
以下是对智能控制器中一些关键术语的解释:智能( Intelligent):(智能控制器通常具备某种形式的人工智能 AI)或机器学习技术,使其能够通过学习和适应的方式改善性能,做出更加智能的决策。
控制器( Controller):(指的是一个设备或系统,负责监测、调整和管理其他设备或系统的运行。
在智能控制器中,这通常涉及到对传感器数据的实时分析,以及对执行器或其他控制设备的指令输出。
自主决策 Autonomous(Decision(Making):(智能控制器具备一定程度的自主决策能力,能够基于输入的数据和预设的规则,独立做出决策而无需人为干预。
传感器( Sensors):(智能控制器通常使用各种传感器来收集环境或系统的数据,这些数据用于分析和做出决策。
传感器可以包括温度传感器、湿度传感器、光敏传感器等。
执行器(Actuators):(智能控制器通过执行器向外部系统发送指令,以实现特定的操作或控制。
执行器可以是电动机、阀门、喷嘴等。
联网能力( Connectivity):(很多智能控制器具备联网能力,能够通过互联网与其他设备或系统进行通信,实现远程监控和控制。
反馈机制( Feedback(Mechanism):(智能控制器通常会包含反馈机制,通过对系统响应的实时监测,调整控制策略以确保系统稳定运行。
实时性(Real-time(Processing):(对于某些应用,智能控制器需要具备实时性,能够在极短的时间内做出响应,以满足系统的要求。
智能控制器广泛应用于自动化系统、工业生产、家庭自动化、交通系统等领域,以提高效率、降低成本,并提供更智能、便捷的服务。
机械手设计概述

机械手设计概述机械手是一种通过电子控制的机器人手臂,其特点是具有多关节,并且可以完成各种复杂的工作。
机械手广泛应用于工业生产中,能够帮助人类完成重复性高、难度大的精细工作,大大提高了工作效率和生产质量。
机械手的设计是机械工程领域中的一项重要技术,本文将对机械手的设计概述进行介绍。
一、机械手的组成机械手通常由机械结构、控制系统、传感器和执行器四部分组成。
机械结构是机械手的物理载体,其设计包括机械臂的材料、形状、长度、关节数量等等。
控制系统是机械手的智能引擎,它可以管理和控制机械手的动作、位置、速度等参数。
传感器可以检测机械手周围的环境,控制机械手避免与其他物体进行碰撞。
执行器是机械手真正完成任务的部分,比如通过手夹进行零件抓取、松开等。
二、机械手的设计原理机械手的设计原理基于三个关键点:1)力学;2)电气学;3)控制理论。
力学主要应用于机械手的材料强度、承重能力、动态特性等方面。
电气学主要应用于控制系统的设计,包括电路、电机、传感器等。
控制理论涉及系统控制理论和数学建模技术,它能够帮助设计师对机械手的运动进行更清晰地规划和优化。
三、机械手的设计步骤1)任务分析:分析所需执行的任务,明确设计的目的和要求。
2)机械结构设计:根据任务分析的结果,确定机械手的材料、形状、长度、关节数量等参数,设计机械臂的机构、运动形式、驱动方式、末端执行器等。
3)控制系统设计:根据机械手的结构和要求,选型控制器、编码器和传感器等,完成控制系统的设计与开发。
4)机械手测试:对机械手进行测试和评估,确保其能够完成预定任务并且性能优良稳定。
5)机械手上线:在实际工作中对机械手进行应用。
四、机械手的应用领域机械手在目前的工业生产中广泛应用,特别是在汽车制造、电子设备、医疗器械、食品加工等领域。
机械手不仅可以取代人力完成精细的任务,而且由于机械手反应快、准确性高,生产效率比人类工作效率更高。
五、机械手的不足与未来发展机械手在应用中也存在一些不足之处,最突出的是柔性差,难以适应不同形状或材料的物体。
机械手自动控制设计

机械手自动控制设计摘要机械手是一种能够模拟人的手臂运动的工具。
通过自动控制机制,机械手能够实现精确的动作,广泛应用于工业生产线、医疗机器人和服务机器人等领域。
本文将介绍机械手自动控制设计的相关内容,包括机械手的结构和原理、自动控制系统的设计和应用场景等。
1. 机械手的结构和原理机械手由多个关节组成,每个关节可以作为一个独立的自由度进行运动。
常见的机械手结构包括串联型、并联型和混合型。
串联型机械手的关节依次连接,可以实现复杂的运动轨迹;并联型机械手的关节通过平行连接,可以实现较高的稳定性和刚度;混合型机械手采用串并联结构的组合,兼具了串联型和并联型的优点。
机械手的运动是由电机驱动的。
电机将电能转换为机械能,通过传动装置驱动机械手的关节运动。
常见的电机类型包括直流电机、步进电机和伺服电机。
直流电机结构简单,控制方便,适用于低功率和低速应用;步进电机能够精确控制转角,适用于高精度应用;伺服电机能够实现闭环控制,在高速、高精度应用中表现出色。
2. 自动控制系统的设计机械手的自动控制系统包括感知、决策和执行三个层次。
感知层负责获取环境信息,包括视觉、力觉和位置等;决策层根据感知信息做出决策,确定机械手的动作;执行层控制机械手的关节运动,完成决策层指定的任务。
2.1 感知层设计感知层主要通过传感器获取环境信息。
常用的传感器包括摄像头、力传感器和位置传感器等。
摄像头可以获取图像信息,用于机械手对工件的识别和定位;力传感器可以测量机械手与工件之间的力和压力,用于力控制和力反馈;位置传感器可以测量机械手的关节位置,用于位置控制和位置反馈。
2.2 决策层设计决策层主要包括机械手的轨迹规划和动作生成。
轨迹规划是指给定起始点和目标点,确定机械手的运动路线;动作生成是指根据轨迹规划生成机械手的具体动作序列。
常用的算法包括插补算法、路径规划算法和运动学算法等。
2.3 执行层设计执行层主要由控制器和执行器组成。
控制器通过对电机的控制来驱动机械手的关节运动;执行器负责将电机的转动转化为机械手的关节运动。
机械手的PLC控制(完整)

江苏信息职业技术学院毕业设计报告毕业设计报告课题:机械手的PLC控制系部:机电系专业:电气自动化班级:电气1332姓名:王琪学号:2013321026指导老师:贾君贤2016-6摘要机械手是工业自动化系统中传统的任务执行机构,是机器人的关键部件之一。
机械手的机械结构采用滚珠丝杆、滑杆、等机械器件组成;电气方面有交流电机、传感器、等电子器件组成。
该装置涵盖了可编程控制技术,位置控制技术、检测技术等,是机电一体化的典型代表仪器之一。
本文介绍的机械手是由PLC 输出三路脉冲,控制机械手横轴和竖轴的精确定位,微动开关将位置信号传给PLC主机;位置信号由接近开关反馈给PLC主机,通过交流电机的正反转来控制机械手手爪的张合,从而实现机械手精确运动的功能。
本课题拟开发的物料搬运机械手可在空间抓放物体,动作灵活多样,可代替人工在高温和危险的作业区进行作业,并可根据工件的变化及运动流程的要求随时更改相关参数。
关键词:机械手 PLC 交流电机目录摘要 (1)引言 (3)第一章机械手机械结构 (4)1.1传动机构 (4)1.2机械手夹持器和机座的结构 (6)第二章机械手PLC及电机的应用 (8)2.1 PLC简介 (8)2.2 PLC内部原理 (10)2.3 机械手PLC选择及参数 (12)2.4 机械手电机的选用 (13)第三章机械手PLC控制系统设计 (14)3.1 机械手的工艺过程 (14)3.2PLC控制系统 (16)致答谢词 (21)参考文献 (21)引言在现代工业中,随着工业现代化的进一步发展,自动化已经成为现代企业中的重要支柱,无人车间、无人生产流水线等等,已经随处可见。
同时,现代生产中,存在着各种各样的生产环境,如高温、放射性、有毒气体、有害气体场合以及水下作业等,这些恶劣的生产环境不利于人工进行操作。
工业机械手是近代自动控制领域中出现的一项新的技术,是现代控制理论与工业生产自动化实践相结合的产物,并以成为现代机械制造生产系统中的一个重要组成部分。
柔性机械手的自适应控制技术研究

柔性机械手的自适应控制技术研究柔性机械手是一种能够模拟人手的机器人。
它由多关节连接而成,可以灵活地运动和控制。
柔性机械手是一项复杂的技术,需要设计和控制方面的专业知识。
本文将探讨柔性机械手的自适应控制技术研究,包括其概念、应用、挑战和未来发展方向等。
柔性机械手的概念和应用柔性机械手是一种类似于人手的机器人,由多个关节连接而成,可以模拟人体的运动。
它可以在不同的环境下完成复杂的操作,例如物品抓取、装配、焊接等。
柔性机械手具有以下几个特点:1. 模仿人手的灵活性和灵敏度,可以在复杂环境中进行操作。
2. 狭小空间内操作能力,可以适应复杂的生产环境。
3. 优越的灵活性,可以通过不同的连接和附加装置来完成不同的任务。
柔性机械手应用广泛,可以用于各种制造业、医疗保健、食品加工和娱乐等领域。
例如,柔性机械手可以在电子制造过程中协助自动化装配,可以在医疗手术中提供精密的控制,可以辅助残疾人的生活等。
柔性机械手的自适应控制技术柔性机械手的自适应控制技术是一项很重要的技术。
它可以使机械手在未知的环境下自适应,并对环境变化做出调整。
自适应控制技术能够让机械手在运作过程中自动调整,使其更加精准、高效地完成任务。
柔性机械手的自适应控制技术具有以下特点:1. 自适应性能强,能够在不同的环境下实现自适应调整。
2. 精度高,可以精准地控制和定位柔性机械手的运动。
3. 高效率,可以实现高速运动和快速响应。
柔性机械手的自适应控制技术主要是通过传感器、控制器和执行机构实现的。
机械手的传感器可以检测外部环境的变化,控制器可以自动调整机械手的动作规划,而执行机构可以实现动作的自适应调整。
柔性机械手的自适应控制技术的挑战和未来发展方向柔性机械手的自适应控制技术还面临着一些挑战。
例如,机械手的传感器需要更加高效和精确,以实现更准确的控制;机械手的控制器需要更加智能和灵活,以实现自适应规划;机械手的执行机构需要更加精准和可靠,以实现柔性性能的自适应调整。
基于PLC的机械手控制设计
基于PLC的机械手控制设计1. 引言1.1 背景介绍背景介绍:机械手是一种能够模仿人手动作完成各种工作任务的机械装置,具有高效、精准、稳定的特点,被广泛应用于工业生产线、仓储物流等领域。
随着工业自动化水平的不断提高,机械手在生产中的应用越来越广泛,对机械手控制技术的要求也越来越高。
本文旨在研究基于PLC的机械手控制设计,探讨PLC在机械手控制中的应用,设计机械手控制系统,并进行实验验证。
通过本研究,旨在提高机械手控制精度和稳定性,推动工业自动化技术的发展,为工业生产提供更多可能性。
1.2 研究意义机器人技术在现代工业生产中起着越来越重要的作用,而机械手作为机器人的重要组成部分,其控制技术的研究对于提高生产效率、降低成本具有重要意义。
研究如何利用PLC进行机械手控制设计,可以实现机械手的自动化控制,提高生产线的运行效率,减少人为操作的误差,提高产品的质量稳定性。
在工业生产中,机械手的广泛应用使得对其控制技术的研究变得至关重要。
通过PLC的应用,可以实现机械手的精准运动控制,灵活适应不同的工作环境和任务要求。
PLC具有高度稳定性和可靠性,能够保证机械手的稳定运行,提高生产效率。
通过本研究,可以深入了解PLC在机械手控制中的具体应用方法,为工程师和研究人员提供参考和借鉴。
本研究的结果也有助于推动机械手领域的发展,促进工业自动化水平的提升。
研究如何基于PLC进行机械手控制设计具有重要的理论和实践意义。
1.3 研究目的研究目的是为了探究基于PLC的机械手控制设计在工业自动化领域的应用效果,为工业生产提高效率、降低成本和减少人为操作风险提供技术支持。
通过本研究,可以深入了解PLC在机械手控制系统中的具体应用方式和优势,为工程技术人员提供可靠的控制方案。
通过对PLC程序设计和机械手运动控制的研究,可以为相关领域的技术人员提供实用的指导和参考。
本研究的目的还在于验证基于PLC的机械手控制系统的可行性和稳定性,为工业生产过程中的自动化控制提供科学依据。
机械手PLC控制系统设计
机械手PLC控制系统设计一、本文概述随着工业自动化程度的不断提高,机械手在生产线上的应用越来越广泛。
作为一种重要的自动化设备,机械手的控制精度和稳定性对于提高生产效率和产品质量具有至关重要的作用。
因此,设计一套高效、稳定、可靠的机械手PLC控制系统显得尤为重要。
本文将详细介绍机械手PLC控制系统的设计过程,包括控制系统的硬件设计、软件设计以及调试与优化等方面,旨在为相关领域的工程师和技术人员提供有益的参考和借鉴。
本文首先将对机械手PLC控制系统的基本构成和工作原理进行概述,包括PLC的基本功能、选型原则以及与机械手的接口方式等。
接着,将详细介绍控制系统的硬件设计,包括PLC的选型、输入输出模块的选择、电源模块的设计等。
在软件设计方面,本文将介绍PLC 编程语言的选择、程序结构的设计、控制算法的实现等关键内容。
本文将介绍控制系统的调试与优化方法,包括PLC程序的调试、机械手的运动调试、控制参数的优化等。
通过本文的介绍,读者可以全面了解机械手PLC控制系统的设计过程,掌握控制系统的硬件和软件设计方法,以及调试与优化的技巧。
本文还将提供一些实用的设计经验和注意事项,帮助工程师和技术人员在实际应用中更好地解决问题,提高控制系统的性能和稳定性。
二、机械手基础知识机械手,也称为工业机器人或自动化手臂,是一种能够模拟人类手臂动作,进行抓取、搬运、操作等作业的自动化装置。
在现代工业生产中,机械手被广泛应用于各种环境和使用场景,以实现生产线的自动化、提高生产效率、降低人力成本以及保障操作安全。
机械手的构成主要包括执行机构、驱动系统、控制系统和位置检测装置等部分。
执行机构是机械手的动作执行部分,通过模拟人类手臂的旋转、屈伸、抓放等动作,实现物体的抓取和搬运。
驱动系统为执行机构提供动力,常见的驱动方式有电动、气动和液压驱动等。
控制系统是机械手的“大脑”,负责接收外部指令,控制驱动系统使执行机构完成预定动作。
位置检测装置则负责检测执行机构的精确位置,为控制系统提供反馈信号,以确保机械手的作业精度。
基于PLC的机械手系统设计——毕业设计论文
毕业设计正文题目:基于PLC的机械手系统设计姓名:专业:机电班级:学号:校内指导老师:校外指导老师:填表日期:湘潭医卫职业技术学院教务处制摘要:PLC是以现代微处理器技术为核心的控制器,作为一种通用的工业控制器,其可靠性高、抗干扰能力强;PLC由于采用现代大规模集成电路技术,采用严格的生产工艺制造,内部电路采取了先进的抗干扰技术,具有很高的可靠性,此外,PLC带有硬件故障自我检测功能,出现故障时可及时发出警报信息;PLC采用光电隔离和滤波技术技术有效抑制外部干扰源对PLC的影响,此外PLC还可在强、通用性好;开发周期短,功耗小。
本课题对现代工业的的发展具有很重要的意义。
关键词:意义,应用,前景,编程语言,设计目录第一章绪论 (2)本课题的意义 (2)本文的主要工作 (2)第二章PLC 的概述 (3)PLC的基本知识 (3)PLC的应用与前景 (3)第三章PLC 的编程语言 (6)梯形图编语 (6)功能块图编程语 (6)第四章PLC控制机械手的设计 (6)机械手在工业生产中的应用 (7)各电器设备的制方式及控制要求 (9)电器元件设备的选择 (11)控制系统的软、硬件设计 (12)功能表图设计 (24)结论 (31)谢辞 (32)第一章绪论本课题的意义机械手是近代自动控制领域中出现的一项新技术,并已成为现代科技的一个重要组成部分。
汽车业的快速发展,车外型愈求美观流线,并由于汽车外板件要求完美无尘的冲压生产线也向高速化、高品质、自动化、柔性化方向发展。
传统冲压生产过程中的手工操作、人工送料的生产方式已无法满足该行业的需要。
机械手的积极作用正日益为人们所认识,其一,它能部分地代替人的劳动并能达到生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送。
因此,它能大大地改善工人的劳动条件,加快实现工业生产机械化和自动化的步伐。
因此,受到各先进单位的重视并投入了大量的人力物力加以研究和应用。
尤其在高温、高压、粉尘、噪声的场合,应用得更为广泛。
基于PLC采摘机器人机械手控制系统改进设计
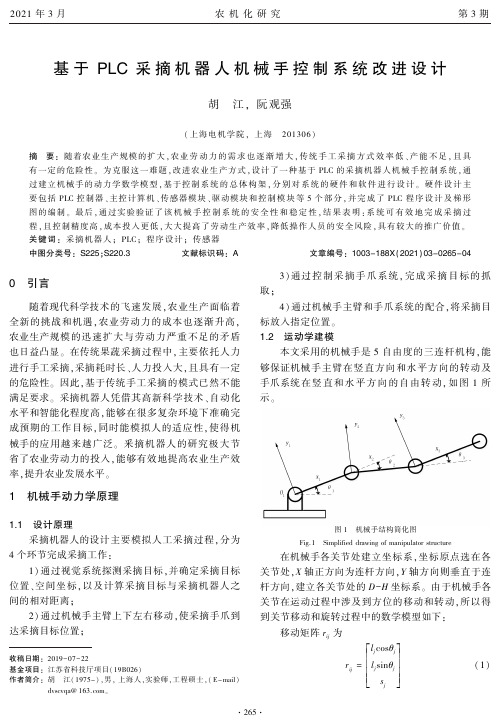
基于PLC采摘机器人机械手控制系统改进设计胡㊀江ꎬ阮观强(上海电机学院ꎬ上海㊀201306)摘㊀要:随着农业生产规模的扩大ꎬ农业劳动力的需求也逐渐增大ꎬ传统手工采摘方式效率低㊁产能不足ꎬ且具有一定的危险性ꎮ为克服这一难题ꎬ改进农业生产方式ꎬ设计了一种基于PLC的采摘机器人机械手控制系统ꎬ通过建立机械手的动力学数学模型ꎬ基于控制系统的总体构架ꎬ分别对系统的硬件和软件进行设计ꎮ硬件设计主要包括PLC控制器㊁主控计算机㊁传感器模块㊁驱动模块和控制模块等5个部分ꎬ并完成了PLC程序设计及梯形图的编制ꎮ最后ꎬ通过实验验证了该机械手控制系统的安全性和稳定性ꎬ结果表明:系统可有效地完成采摘过程ꎬ且控制精度高ꎬ成本投入更低ꎬ大大提高了劳动生产效率ꎬ降低操作人员的安全风险ꎬ具有较大的推广价值ꎮ关键词:采摘机器人ꎻPLCꎻ程序设计ꎻ传感器中图分类号:S225ꎻS220.3㊀㊀㊀㊀㊀㊀文献标识码:A文章编号:1003-188X(2021)03-0265-040㊀引言随着现代科学技术的飞速发展ꎬ农业生产面临着全新的挑战和机遇ꎬ农业劳动力的成本也逐渐升高ꎬ农业生产规模的迅速扩大与劳动力严重不足的矛盾也日益凸显ꎮ在传统果蔬采摘过程中ꎬ主要依托人力进行手工采摘ꎬ采摘耗时长㊁人力投入大ꎬ且具有一定的危险性ꎮ因此ꎬ基于传统手工采摘的模式已然不能满足要求ꎮ采摘机器人凭借其高新科学技术㊁自动化水平和智能化程度高ꎬ能够在很多复杂环境下准确完成预期的工作目标ꎬ同时能模拟人的适应性ꎬ使得机械手的应用越来越广泛ꎮ釆摘机器人的研究极大节省了农业劳动力的投入ꎬ能够有效地提高农业生产效率ꎬ提升农业发展水平ꎮ1㊀机械手动力学原理1.1㊀设计原理采摘机器人的设计主要模拟人工采摘过程ꎬ分为4个环节完成采摘工作:1)通过视觉系统探测采摘目标ꎬ并确定采摘目标位置㊁空间坐标ꎬ以及计算采摘目标与采摘机器人之间的相对距离ꎻ2)通过机械手主臂上下左右移动ꎬ使采摘手爪到达采摘目标位置ꎻ收稿日期:2019-07-22基金项目:江苏省科技厅项目(19B026)作者简介:胡㊀江(1975-)ꎬ男ꎬ上海人ꎬ实验师ꎬ工程硕士ꎬ(E-mail)dvscvqa@163.comꎮ3)通过控制采摘手爪系统ꎬ完成采摘目标的抓取ꎻ4)通过机械手主臂和手爪系统的配合ꎬ将采摘目标放入指定位置ꎮ1.2㊀运动学建模本文采用的机械手是5自由度的三连杆机构ꎬ能够保证机械手主臂在竖直方向和水平方向的转动及手爪系统在竖直和水平方向的自由转动ꎬ如图1所示ꎮ图1㊀机械手结构简化图Fig.1㊀Simplifieddrawingofmanipulatorstructure在机械手各关节处建立坐标系ꎬ坐标原点选在各关节处ꎬX轴正方向为连杆方向ꎬY轴方向则垂直于连杆方向ꎬ建立各关节处的D-H坐标系ꎮ由于机械手各关节在运动过程中涉及到方位的移动和转动ꎬ所以得到关节移动和旋转过程中的数学模型如下:移动矩阵rij为rij=ljcosθjljsinθjsjéëêêêêùûúúúú(1)旋转矩阵Cij为Cij=cosθj-sinθjcosαijsinθjsinαijsinθjcosθjcosαij-cosθjsinαij0sinαijcosαijéëêêêêùûúúúú(2)根据式(1)和式(2)ꎬ计算可得D-H坐标系下ꎬ机械手某点M的坐标ꎬ从j坐标系变换移动到i坐标系的变换矩阵Mij为Mij=Cijrij0001éëêêùûúú(3)由此可得ꎬ机械手某点M从初始坐标系xiyizi变化到目标坐标系xjyjzj的关系式为xiyizi1éëêêêêêùûúúúúú=Mijˑxjyjzj1éëêêêêêùûúúúúú(4)2㊀控制系统总体设计采摘机器人机械手控制系统主要由以下6个模块组成ꎬ包括PLC控制器㊁通信模块㊁传感器模块㊁主控计算机㊁驱动模块/保护模块和控制模块ꎮ控制系统总体结构如图2所示ꎮ图2㊀控制系统总体结构图Fig.2㊀OverallstructureofthecontrolsystemPLC控制器和主控计算机是控制系统的核心部件ꎬ负责数据的分析和计算ꎬ以及相关执行命令的下达ꎮ具体工作流程为:传感器模块采集到的各类信号传输至主控计算机ꎬ经过动力学数学模型的计算ꎬ将相关目标参数通过通信模块传输至PLC控制器ꎻPLC控制器经过内部数据分析ꎬ将生成的控制参数回传至主控计算机ꎬ通过驱动模块控制相应的控制模块动作ꎬ从而完成采摘过程ꎮ3㊀控制系统硬件设计3.1㊀PLC自动控制原理机械手PLC自动控制原理是由PLC控制器控制驱动模块/保护模块动作ꎬ从而通过电磁阀控制液压缸㊁液压马达动作实现ꎮ其大臂的上升㊁下降ꎬ左右转动ꎬ前后翻转ꎬ都是通过用电磁阀驱动液压缸或液压马达完成的ꎮ电磁阀线圈通电时ꎬ电磁阀所处的单元回路通电ꎬ相应的执行模块动作ꎻ电磁阀线圈断电时ꎬ单元回路处于短路状态ꎬ执行模块中的手爪断电ꎬ松开控制对象ꎮ3.2㊀硬件模块设计1)传感器模块ꎮ传感器模块主要是采集各种传感器信号ꎬ包括位置传感器信号㊁压力传感器信号㊁视觉传感器信号和碰撞传感器信号ꎬ主要负责采集采摘目标位置的位置㊁采摘抓取的压力㊁识别采摘目标的空间位置ꎬ以及接触到采摘目标的碰撞信号ꎮ2)控制模块ꎮ控制模块为系统的执行模块ꎬ主要控制大臂㊁小臂和手爪等系统的移动㊁旋转和抓取等动作ꎮ3)通信模块ꎮPLC与主控计算机的通信是基于PLC专用的通信模块实现的ꎮ主控计算机输出的控制参数和PLC输出的控制参数数据类型不同ꎬ需要通过特定的通信协议将两种类型的数据进行相互转换ꎬ从而完成数据的传输ꎮ4)驱动模块ꎮ驱动模块主要包括驱动电源㊁液压缸㊁液压马达和驱动电机ꎬ驱动模块接收主控计算机传递的控制信号ꎬ控制对应的驱动单元动作ꎬ从而完成对各控制模块的控制ꎮ3.3㊀PLC硬件接线及I/O分配通过分析控制系统的功能需求ꎬ得出该控制系统需要输入15个输入点和9个输出点ꎮ而输入点和输出点的控制属于开关量控制ꎬ因此选择西门子系列的S7-300型PLCꎬ输入输出节点的增减可以通过对应的数字量模块的组合实现ꎮPLC输入端的15个I/O点接在相应的开关或按钮上ꎬ输出端的9个I/O点也接到对应的控制模块上ꎮ其I/0分配表如表1所示ꎮ表1㊀PLC控制系统I/O分配表Table1㊀I/OdistributiontableforPLCcontrolsystem输入点输入元件输出点输出元件X0开始按钮YO上升电磁阀续表1输入点输入元件输出点输出元件X1上限位开关Y1下降电磁阀X2下限位开关Y2抓取电磁阀X3左限位开关Y3松开电磁阀X4右限位开关Y4左移电磁阀X5上升按钮Y5右移电磁阀X6下降按钮Y6上翻转电磁阀X7左移按钮Y7下翻转电磁阀X8右移按钮Y8初始位置指示灯X9上翻转按钮X10下翻转按钮X11抓取按钮X12松开按钮X13复位按钮X14手动按钮4㊀控制系统软件设计4.1㊀程序设计采摘机器人机械手程序设置有复位程序㊁手动运行程序和自动运行程序ꎮ手动程序根据具体执行动作要求编辑梯形图ꎬ驱动输出相同作用的线圈ꎬ各种电磁阀的动作都是通过操作相应的按钮实现ꎮ机械手处于初始位置时ꎬ左限位开关和上限位开关处于通电状态ꎬ此时两个开关都是闭合的ꎻ按下开始按钮ꎬ机械手大臂开始上移ꎬ上移至上限位传感器指示灯亮ꎬ说明大臂上移动作完成ꎻ手爪到达采摘目标位置并检测到目标信号ꎬ通过程序的状态转移ꎬ机械手小臂伸出ꎬ同时手爪开始抓取采摘目标ꎻ检测到压力信号后ꎬ摘下目标后机械手移动到对应位置ꎬ松开目标ꎬ采摘过程结束ꎮ其具体程序流程如图3所示ꎮ具体流程可概括为:按下开始按钮ꎬ机械手上移(Y0得电)并维持一定时间到达目标位置ꎬ抓取电磁阀(Y2得电)ꎬ机械手上移(Q0.2得电)并到达上限位置ꎻ机械手右移(Y5得电)并维持一定时间后到达右限位置ꎬ机械手下移(Y1得电)ꎬ松开电磁阀(Y3得电)ꎬ机械手左移(Y4得电)ꎬ回到原位ꎻ按下停止开关后ꎬ采摘过程结束ꎮ图3㊀控制系统程序流程图Fig.3㊀Flowchartofcontrolsystemprogram4.2㊀PLC梯形图设计梯形图程序采用常规继电器顺控方法来设计ꎬ如图4所示ꎮ图4㊀控制系统PLC梯形图Fig.4㊀PLCladderdiagramofcontrolsystem考虑到安全因素ꎬ当机械手需要向左或向右移动时ꎬ必须在机械手大臂处于上限位置时才能进行ꎮ因此ꎬ在梯形图程序中ꎬ左右移动动作回路中设置了互锁保护ꎻ同样的原理ꎬ上升和下降动作㊁上翻转和下翻转动作设置了互锁保护ꎬ抓取和松开电路中也设置互锁环节ꎮ5㊀结论基于PLC的采摘机器人机械手控制系统采用西门子S7-300系列PLC控制器ꎬ通过硬件选型及硬件接线ꎬ合理分配I/O地址ꎬ优化机械手操作程序流程ꎬ并简化梯形图ꎬ优化了控制系统系统ꎮ通过实验可得:该控制系统能较好地控制整个采摘过程ꎬ系统软硬件运行安全可靠ꎬ有效提升劳动生产效率ꎬ改进生产方式ꎬ提高生产质量ꎬ较大程度上避免人工操作带来的潜在风险ꎬ保障农业生产操作人员的生命安全ꎬ对提升企业生产效益有着重要的意义ꎮ参考文献:[1]㊀杨宜平ꎬ魏泽鼎ꎬ岳彦芳ꎬ等.PLC一触摸屏控制在晶体成型设备中的应用[J].新技术与新工艺ꎬ2003(10):l0-12. [2]㊀廖常初.S7 300/400PLC应用技术[M].北京:机械工业出版社ꎬ2005:44-102.[3]㊀SIMATlCHMItouchpanelTP270设备手册[K].Germany:Sie-mensꎬ200l:26-50.[4]㊀范金玲.基于PLC的气动机械手控制系统设计[J].液压与气动ꎬ2010(7):36-38.[5]㊀王月芹.基于PLC机械手控制系统设计与实现[J].机电产品开发与创新ꎬ2011(3):149-151.[6]㊀郅富标ꎬ毋虎城ꎬ张四海.基于PLC的物料搬运机械手控制系统设计[J].中州煤炭ꎬ2011(5):14-15ꎬ39. [7]㊀赵庆波ꎬ赵德安ꎬ姬伟ꎬ等.采摘机器人视觉倒服控制系统设计[J].农业机械学报ꎬ2009ꎬ40(1):152-156. [8]㊀刘金琨.先进PID控制及其MATLAB仿真[M].北京:北京电子工业出版设ꎬ2003.[9]㊀方建军.采摘机器人开放式控制系统设计[J].农业机械学报ꎬ2005ꎬ36(5):83-86.[10]㊀杨文亮.苹果采摘机器人机械手结构设计与分析[D].镇江:江苏大学ꎬ2009.[11]㊀吕继东ꎬ赵德安ꎬ姬伟.苹果采摘机器人目标果实快速跟踪识别方法[J].农业机械学报ꎬ2014ꎬ45(1):65-72.[12]㊀赵德安ꎬ沈甜ꎬ陈玉ꎬ等.苹果采摘机器人快速跟踪识别重叠果实[J].农业工程学报ꎬ2015ꎬ31(2):22-28. [13]㊀丁祥青ꎬ马莉.采摘机器人机械手结构设计与分析[J].机床与液压ꎬ2017(23):40-42.[14]㊀GuoJꎬZhaoDAꎬJiWꎬetal.Designandcontroloftheopenapple-picking-robotmanipulator[C]//IEEEInternationalConferenceonComputerScienceandInformationTechnolo ̄gy.IEEEꎬ2010:5-8.[15]㊀ZhaoDAꎬLvJꎬWeiJꎬetal.Designandcontrolofanap ̄pleharvestingrobot[J].BiosystemsEngineeringꎬ2011ꎬ110(2):112-122.[16]㊀LiJꎬKarkeeMꎬZhangQꎬetal.Characterizingapplepick ̄ingpatternsforroboticharvesting[J].Computers&Elec ̄tronicsinAgricultureꎬ2016ꎬ127(C):633-640.ImprovedDesignofRobotControlSystemforPickingRobotBasedonPLCHuJiangꎬRuanGuanqiang(ShanghaiInstituteofElectricalEngineeringUniversityꎬShanghai201306ꎬChina)Abstract:Withtheexpansionofagriculturalproductionscaleꎬthedemandforagriculturallaborgraduallyincreases.Thetraditionalhand-pickingmethodhaslowefficiencyꎬinsufficientproductioncapacityandcertainrisks.Inordertoover ̄comethisproblemꎬtoimprovethewayofagriculturalproductionꎬinthispaperdesignedakindofpickingrobotmanipu ̄latorbasedonPLCcontrolsystemꎬthroughtheestablishmentofdynamicmathematicalmodelofthemanipulatorꎬtheo ̄verallframeworkforthedesignofthecontrolsystemꎬrespectivelyꎬofthesystemhardwareandsoftwaredesignꎬhardwaredesignmainlyincludesthePLCcontrollerꎬmaincontrolcomputerꎬsensormoduleꎬdrivemoduleandcontrolmoduleandsoonfivepartsꎬcompletedthePLCprogramdesignandladderdiagramꎬfinallythemanipulatorcontrolsystemisverifiedbyexperimentofsecurityandstabilityꎬtheresultsshowedthat:Thesystemcaneffectivelycompletethepickingprocessꎬandthecontrolprecisionishighꎬthecostinputislowerꎬgreatlyimprovethelaborproductionefficiencyꎬreducethesafe ̄tyriskofoperatorsꎬandhasagreatpromotionvalue.Keywords:pickingrobotsꎻPLCꎻprogramdesignꎻthesensor2021年3月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第3期。
运动控制器在自动化设备中的应用
海川运动控制器在自动化设备中的应用一、引言随着科技的不断发展,自动化设备已经成为工业生产中的重要一环。
在这个过程中,运动控制器扮演着关键的角色。
本文海川将探讨运动控制器在多种自动化设备中的应用,包括绕线机、商标机、机器人、机械手、包装机、定子绑线机、切割机等。
二、运动控制器概述运动控制器是一种专为机械设备运动控制而设计的电子设备,它能够理解自然语言并生成对应的回复,回复思路清晰,逻辑严密,推理精确。
运动控制器主要负责设备的运动轨迹、速度、加速度等参数的控制,从而实现设备的自动化运行。
三、运动控制器在不同自动化设备中的应用1. 绕线机控制器:运动控制器可以精确控制绕线机的运动轨迹和速度,确保绕线质量的一致性和稳定性。
2. 商标机控制器:通过运动控制器,可以实现商标机的自动化运行,提高生产效率。
3. 机器人控制器:运动控制器是机器人控制系统的核心组成部分,可以控制机器人的运动轨迹、速度和姿态,实现各种复杂的工作任务。
4. 机械手控制器:运动控制器可以精确控制机械手的运动轨迹和速度,提高生产过程的自动化程度。
5. 包装机控制器:通过运动控制器,可以实现包装机的自动化运行,提高生产效率。
6. 定子绑线机控制器:运动控制器可以精确控制绑线机的运动轨迹和速度,确保绑线质量的一致性和稳定性。
7. 切割机控制器:通过运动控制器,可以实现切割机的自动化运行,提高生产效率。
四、TRIO运动控制器和EtherCAT总线控制器在自动化设备中的应用TRIO运动控制器是一种功能强大的运动控制器,它可以实现多轴同步控制,具有快速处理能力和高精度控制能力。
在自动化设备中应用广泛,如绕线机、商标机、包装机等。
同时,TRIO运动控制器还支持EtherCAT总线协议,可以通过EtherCAT总线对设备进行分布式控制,进一步提高生产效率。
五、结论运动控制器在自动化设备中发挥着重要的作用,通过精确控制设备的运动轨迹、速度等参数,可以实现设备的自动化运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第3 期
倪云峰 , 智能控制器在机器人机械手位里控制 中的应用 等:
19 0
() 3系统控制单元都采用模拟分离器件。 () 4 关节的传动系统采用直齿轮和齿带结构。 在实际教学研究工作 中,J - 教学机器人 因 JR 1 其控制部分采用模拟分离器件组成的电子线路 , 存 在不 同程度的零漂和不稳定 因素 , 给系统的定位精 度引人了误差。本文首先设计了基于 8C 9K 0 16 C微 控制器为核心的全数字直流伺服控制系统, 以满足 较高的控制要求, 并在此基础上展开研究工作。
图3 E 刃 [ 为转角误差, 7 中, 阮e为误差增量。 设
位置误差模糊量为 E, 误差的变化量为 C E , [ ] 控制 输出量为 U。 将误差E, 误差变化率C E 及控制量U的论域 [」 取为福 } ( [ ] = 丈 = { , , ,, , E 二 C E } U} -3 -2 一10十1 十2 +3 , , )其模糊子集语言变量描述词汇如下, 即: { 负大, 负中, 负小, 正小, 零, 正中, 正大} { , m 一3
而得到 了广泛 的应用 。 笔者在研究 中首先 采用 了
1 控制系统的构成
本文设计的全数字直流伺服控制系统分二级结 构组成, 如图 1 所示。其中, 采用以 P C机作为上位 机, 用于实现关节运动的轨迹规划、 命令传送以及关 节位置信息反馈; 下位机采用 MC 9 S 6系列单片机 作为机械手关节位置定位的闭环控制核心。 微处理器(0 16 C 组成的控制系统主要实 8C 9K ) 现与上位机的信息交换, 获取关节运动指令信息, 并 及时将位置信息反馈至上位机; 另外该系统还进行 关节的运动控制 , 即将获取 的关节运动指令与从位 置检测器口获取的反馈信息 比较, 进而构成闭环控
N Y nf g, I Dn I - n' LU 犷 u e i
(. ol o m n a o ad om t nl i ei , a U i r t o Si c ad 1 Sho o C m ui t n If ai a E g er g X ' n esy c ne c f ci n n r o nn n i n v i f e n
收稿为: () 1 结构上是一个五关节的机器人机械手。 () 2 全部关节采用直流力矩电机和旋转变压器
实现调相式闭环控制。
作者简介: 倪云峰(98 , , 16 -)男 陕西韩城人 , 西安科技大学讲 师, 硕士 .
万方数据
式中: . T 为电磁时间常数 ; 1 T 为电机时间常数 ; K为 驱动电路的放大倍数以及 电机减速器减速 比的综合
值; S为积分环节。
图2 表示机械手输出转过的角度; 中的0 凡表示
给定角度; 表示反馈角度。 o f
2 控制规律
在工程上,I P D控制器因其具有结构简单, 能 适应大量工业过程的控制要求 , 具有较强的鲁棒性
位1 定 2给
Ee [1
转 角翰 出
针对教学用机械手 , 我们 只注重其定位的精度 而对其快速性要求不高 , 因此采用了单 闭环控制系
o , 户川# 而歌J D / A
K
图 3 模糊控制结构图
STS 1(, 1 ( + T + ) S )
图 2 臂关节控制模型
统, 以臂关节为例, 确定其数学模型在机械手臂关节 对象 中, 一般将直流力矩 电机模型以两个惯性环节 来简化, 其表达式为
K/ ( S+ 1 ( S瓦 ) 工S十 1 )
万方数据
1 0 1
长安大学学报( 自然科学版)
第2 4卷 第 3 期 20 年 5月 04
长安大学学报( 自然科学版) J rl h gn vs (ar See i) o n oCa ' UirtNta cn Ein u a f a nei ul c do n y i t
Vo. No 3 l2 4 .
Ma 20 y 4 0
中圈分类号 : P 4 T 21 文献标识码 : A
D s nn ad l n o it l et t l r ei ig i e t ne i n cnr l g n mp me f lg o oe i ma iuao p s in nrl n np ltr io c to ot o
DA 出 /箱 位里反馈
电流 限幅
图 1 控制系统结构图
在控制器有规律的作用下, D A转换输出 经 / ( 电压) 信号实现对力矩电机的定位控制, 系统结构
如图 2 0
区, 使得控制精度降低, 存在超调。 I 控制器在线 PD 性控制领域得到了广泛应用叫, 但是如何使得 P D I 控制应用于非线性控制系统 , 并具有一定的可靠性 , 一直为人们所关注, 由于模糊控制具有一定 的智能 性, 对于非线性的控制具有一定的特点 , 因而可以预 见, 若将模糊控制策略应用于 P D 控制器的设计, I 使控制器既具有传统 P D控制器的优点, I 又具有模 糊控制的智能特点, 从而使得控制策略能够随工况 的不同而实时调整 , 其控制结构如图 3 所示 。
为了适应机器人教学的需要 , 本文 以中国科学 院生产的JR 1 J - 型机器人作为研究对象, 进行教学 研究 。JR 1 J - 型教学机器人在结构和功能上接近现
0 引
言
2 世纪 8 年代 以来 , 0 0 机器人技术得到迅速发 展, 并在机器制造业领域中得到了广泛应用[ 。机 [ t ] 器人技术涉及力学、 机械学、 信息学、 图形学等各种 知识 , 是典型的机电一体化产品, 目前在中国也展开 了这方面的研究并取得了一定的成果 。
制系统 。
DA 出 /箱
位里反馈 电流 限幅
P D控制器。 I 以臂关节为研究对象进行 了系列的折 算, 测得结果为
瓦 = 0 7, 2 1 工 = 1 = 0 0 2 ( > 工) . R / .0 4 3 瓜
其开环传递函数
G ) ( S
4. 09
S 0 2 4 + 1 ( . S 7 )
20 0 4年
一2 一10 +1 +2 +3。 , ,, , , }在系统中, 位置的给定
值为 0 至 30, 0 60转角的采样值是利用 8C 9K 0 16 C单 片机的高速输人口来检测旋变 B合成信号 认 s ( ic nv t ) +a 得出转角信息 a一90 <+ 0, ( 0 < a 9 ) 位置误 0 差的模糊值及模糊量赋值如表 1 所示。 转角误差增量 C ] M E [ 表示为 ] M E [ C Bi 一E Bi ) =E ( 〕 [( ] [ ) 一1 其模糊化及模糊变量的赋值如表 2 所示。
文章绷号 :6 1 89 20 )3 180 17- 7 (0 40- 0-3 8 0
智能控制器在机器人机械手位置控制中的应用
倪云峰‘ 刘 , 丁“
(. 1西安科技大学 通信与信息工程学院, 陕西 西安 705 ; 104 2西安理工大学 自动化与信息工程学院, . 陕西 西安 704) 108
摘 要: JR 1 以 J - 型教学机器人为基础描述 了智能控制 器在机械手定位控制 中的应用。对机器人 机械手的肴关节进行 了测试与折算, 给出了其数学模型。在此基础上提 出了采用模糊控制器智能 自 调整因子的方式来提 高机械手的定位精度。仿真实验结果表明, 采用此法能够克服单纯使 用 P D控制存在的死区和超调, 系统愉 出超调明显减小, I 使 定位精度得到提高。 关键词 : 智能控制器; 模糊控制; 机械手; 位里控制
T cn l y X 'n 0 5 , ia; . o l Auo t n d omai a E g er g eh o g , a 7 0 4 C n 2 Sh o o tmao a Ifr t nl i ei , o i 1 h c f i n n o nn n
X'n i r t o T cnl y X'n 04 ,h a i U v sy eho g , a 7 08C i ) a n e i f o i 1 n
A s at R b t l ay ld mah ey n f tr f tr bod . te - T ah bt c: oo ia ed ap e i ci r maua ue oy al b h JR 1 c- r s r p i n n c a c r y y J e ig b t te lai o i ei n cnrlr s c m l i m n u tr T e a e n R o, ap ct n n lg t t l w ds a be n i l o. prm - o h p i o f l e o o e a e r t d a p a h a
衰 1 俱 理 的桩翻 化衰及 变,盆值 襄 E B 一3 一2 一1 1 [7 E 0 2 3
时Q . E刃镇3。 夕 . 根据上述控 = 7; 05 [ 0 时, =01。 5
制规则进行系统仿真, 结果如图 4 所示。图中纵坐 标表示系统的输出相对值 , 横坐标表示系统的输 出 时间。图 4a表示输人单位阶跃信号下, 自调整 () 无 因子时的输出波形图; 4 b 表示在 同样条件下 , 图 () 加人 自调整因子后的系统输出波形图。仿真结果表 明, 自调整因子后, 采用 系统超调量明显减小, 快速 性有所改善。
tr fr am JR 1 s cl e a d td atr mahmo e o te o tie , es te o J - w cl a d tse , e te t- d l h am a d a o h r f a aut n e f h f r b n
m to w s fr ad t n te eiet z cnrlr dps f d s be i ehd pt w r ta ui h i lgn fzy t l o aot slaj t l vr - a u o h s g n l t u o o e f e- u a a a be o ecme p eo n n da-oe o e-o t l a d rv te ain crc. l t vro te n meo o edzn , r nr , i o e lct a uay o h h f v c o n mp h o o c Smuai dmo s ae ta te to cn ue oef w ss m tu ad rv i l o e nt td t meh d rd c te r o o yt o p t i o e t n r h h a e h v l f e u n mp te e o rah g b i s t i sse . h sed eci s it t e yt p f n t ly n m a a K y rs it l et t l uz cnrl m npl o; t n t l e w d: e i n cnr ; zy t ; iu trpsi cnr o n lg o of o o a a oio o o