微机原理作业第9章
微机原理及接口第九章作业答案
“微机系统原理与接口技术”第九章习题解答(部分)1. 什么是并行接口和串行接口?它们各有什么作用?答:并行接口是指接口与外设之间按字长传送数据的接口,即4位、8位或16位二进制位同时传送;而串行接口是指接口与外设之间依时间先后逐位传送数据的接口,即一个时刻只传送一个二进制位。
并行接口传送速度较快,但在远距离传送数据时成本高,损耗大,且平行数据线之间干扰大,所以并行接口一般适用于近距离的高速传送,而串行接口则适用于远距离传送。
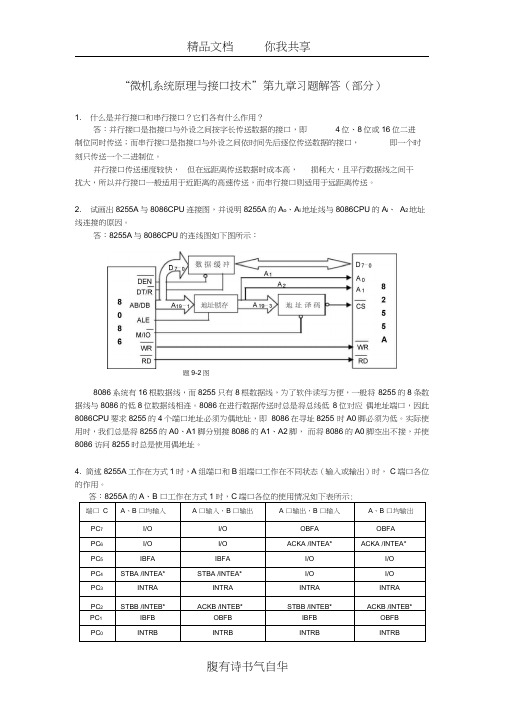
2. 试画出8255A与8086CPU连接图,并说明8255A的A o、A i地址线与8086CPU的A i、A2地址线连接的原因。
答:8255A与8086CPU的连线图如下图所示:题9-2图8086系统有16根数据线,而8255只有8根数据线,为了软件读写方便,一般将8255 的8条数据线与8086的低8位数据线相连。
8086在进行数据传送时总是将总线低8位对应偶地址端口,因此8086CPU要求8255的4个端口地址必须为偶地址,即8086在寻址8255 时A0脚必须为低。
实际使用时,我们总是将8255的A0、A1脚分别接8086的A1、A2脚,而将8086的A0脚空出不接,并使8086访问8255时总是使用偶地址。
4. 简述8255A工作在方式1时,A组端口和B组端口工作在不同状态(输入或输出)时,C端口各位的作用。
注:带*的各中断允许信号由 C 口内部置位/复位操作设置,非引脚电平。
5. 用8255A控制12位A/D转换器,电路连接如下图所示。
设B 口工作于方式1输入,C 口上半部输入,A 口工作于方式0输入。
试编写8255A的初始化程序段和中断服务程序(注:CPU采用中断方式从8255A中读取转换后的数据)。
答:设8255的A、B、C及控制端口的地址分别为PORTA、POATB、PORTC和PCON,则一种可能的程序段实现如下:初始化8255AMOV AL,10011110B;设置8255A的工作方式控制字OUT PCON,ALMOV AL,00000101B;设置C 口置位復位控制字,使INTEA (PC2)为OUT PCON,AL;高电平,允许B 口中断MOV AL,00000010B;设置C 口置位/复位控制字,使PC1(IBF B)输出OUT PCON,AL;低电平,启动第一次A/D转换6. 用8255A作为CPU与打印机接口,8255的A 口工作于方式0,输出;C 口工作于方式0。
精品课件-微机原理与接口技术-第9章
第9章 D/A、A/D转换接口 图9.2 D/A转换的基本原理
第9章 D/A、A/D转换接口
DAC的输出形式有电压、电流两大类型。电压输出型的DAC 相当于一个电压源,内阻较小,选用这种芯片时,与它匹配的 负载电阻应较大;电流输出型的DAC相当于电流源,内阻较大, 选用这种芯片时,负载电阻不可太大。
第9章 D/A、A/D转换接口
在实际应用中,有时仅要求输出是单方向的,即单极性输 出,其电压通常为0~+5 V或0~+10 V;有时则要求输出是双 方向的,即双极性输出,如电压为±5 V、±10 V。单极性和 双极性输出电路分别如图9.4(a)和(b)所示。在图9.4(b)中, 通过运算放大器A1将单极性输出转变为双极性输出,由UREF为A2 提供一个偏移电流,该电流方向应与A1输出电流方向相反。
第9章 D/A、A/D转换接口
能够将数字量转换成模拟量的器件称为数字/模拟转换器, 简称DAC或D/A转换器。
计算机通过ADC或DAC与外界使用模拟量的设备相连接的技 术就是模拟接口技术,它是计算机应用于自动控制领域的基础。 一个典型的计算机测控系统如图9.1所示。
第9章 D/A、A/D转换接口 图9.1 典型的计算机检测、控制系统框图
第9章 D/A、A/D转换接口
二—十进制的转换公式: B=bn-1bn-2… b1b0=bn-1×2n-1+bn-2×2n-2+…+ b1×21+b0×20
式中,B表示转换后的十进制数;bn-1为二进制数的最高位, b0为二进制数的最低位。
为了把一个数字量变为模拟量,必须把每一位的数码按照 权来转换为对应的模拟量,再把各模拟量相加。这样,得到的 总模拟量便对应于给定的数据。DAC的主要部件是电阻开关网 络,它通常是由输入的二进制数的各位控制一些开关,通过电 阻网络,在运算放大器的输入端产生与二进制数各位的权成比 例的电流,经过运算放大器相加和转换而成为与二进制数成比 例的模拟电压。最简单的DAC电路如图9.2(a)所示。
《微机原理与接口技术》第九章8253
二、8253的内部结构
数据总线 缓冲器 读/写控 制电路 计数通道
通道控制 寄存器
三、 8253的管脚分配
控制线
数据线 通道选择
通道管脚
四、 8253的编程
8253只有一个控制字,8253的一个方式 控制字只决定一个计数通道的工作模式。 8253 的控制字格式如图所示。共分为 4 部 分,通道选择、计数器读 / 写方式、工作 方式和计数码的选择。
第9章 可编程接口芯片
可编程接口概术 可编程定时/计数器接口芯片8253
可编程接口概术
一个简单的具有输入功能和输出功能的 可编程接口电路如下图,它包括一个输入接口, 其组成主要是八位的三态门;一个输出接口, 其组成主要是八位的锁存器;另外还有八位的 多路转换开关及控制这个开关的寄存器FF。
9. 1 可编程定时/计数器接口芯片8253 一、功能
定时和脉冲信号的处理与接口是完全有别于 并行信号的,其特点是信号形式简单但需要连 续检测,下面介绍的INTEL8253可编程定时/ 计数器就是可以实现所要求这方面功能。8253 内部有3个独立的16位定时/计数器通道。计 数器可按照二进制或十进制计数,计数和定时 范围可在1—65535之间改变,每个通道有6种 工作方式,计数频率可高达2MHz以上。
4、方式3——方波发生器 方式2虽然可以作分频电路,但其输出 是窄脉冲,如果是方波,就只有选方式3
5、方式4——软件触发方式 方式4在工作过程中有以下特点:
a、 门控信号GATE为高电平,计数器开始减 1计数,OUT维持高电平; b、 当计数器减到0,输出端OUT变低,再经 过一个 CLK 输入时钟周期, OUT 输出又变 高。
解:1、电路。 需要两个通道,一个作为计数,选用通道0。另一 个产生1KHz信号,选用通道1。工作原理如下,传感 器电路把物理事件转换为脉冲信号输入到通道0计数, 当记录10000个事件后,通道0计数器溢出,GATE端输 出高电平,这时通道1开始工作,产生1KHz信号推动喇 叭发音。
微机原理第九章练习题及解

微机原理第九章练习题及解一:单项选择题●8253的端口地址数为( C )。
A:1个B:2个C:4个D:8个●8255的A端口读写操作时,地址线(A)。
A:A1 = 0、A0 = 0 B:A1 = 0、A0 = 1C:A1 = 1、A0 = 0 D:A1 = 1、A0 = 1●写8255的控制字88H,功能是( B )。
A:A口方式0输入B:B口方式0输出C:置PC4为低D:置PC7为高●从8255的C端口读状态信息时,地址线( C )。
A:A1 = 0、A0 = 0 B:A1 = 0、A0 = 1C:A1 = 1、A0 = 0 D:A1 = 1、A0 = 1●8088与8255连接时的写控制字地址是( D )。
A:100H B:101H C:102H D:103H●8086与8255连接时的B口读写地址是( B )。
A:100H B:102H C:104H D:106H●8253写方式控制字时,地址线( D )。
A:A1 = 0、A0 = 0 B:A1 = 0、A0 = 1C:A1 = 1、A0 = 0 D:A1 = 1、A0 = 1●8253的计数器0读写操作时,地址线(A)。
A:A1 = 0、A0 = 0 B:A1 = 0、A0 = 1C:A1 = 1、A0 = 0 D:A1 = 1、A0 = 1●8253的控制字为85H,功能为( B )。
A:计数器0二进制计数B:计数器2十进制计数C:计数器0低8位初值D:计数器2高8位初值●8253的控制字为78H,计数器选择为( B )。
A:计数器0 B:计数器 1 C:计数器 2 D:无作用●8253的控制字为40H,工作方式选择为( C )。
A:方式0 B:方式 2 C:方式 4 D:方式5●8259固定优先权方式的中断请求信号IR0—IR7的优先权顺序为( A )。
A:IR0→IR7 B:IR7→IR0C:IR0→IR7→IR-1 D:每个中断请求信号等优先权。
微机原理1-11章答案精简版
第一章习题答案一、单选题1.1946年2月,在美国诞生了世界上第一台计算机,它的名字叫 C 。
A.EDV AC B.EDSAC C.ENIAC D.UNIV AC-I2.在下列描述中属于冯·诺依曼体系结构特点的是 C 。
Ⅰ.采用16进制计数。
Ⅱ.集中而顺序的控制。
Ⅲ.存储程序并且存储时不区别数据和指令。
A.Ⅰ和ⅡB.Ⅰ和ⅢC.Ⅱ和ⅢD.Ⅰ,Ⅱ和Ⅲ3. C 是以CPU为核心,加上存储器、I/O接口和系统总线构成。
A.微处理器B.微型计算机C.微型计算机系统D.单板机4.计算机的字长越长,一个字所能表示的数据精度就越高,在完成同样精度的运算时,则数据处理速度 A 。
A.越高B.越低C.不变D.不一定5.计算机存储数据的最小单位是二进制的 B 。
A.位B.字节C.字长D.千字长6.通常所说的32位机,是指这种计算机的CPU B 。
A.由32个运算器组成的B.能够同时处理32位二进制数C.包含32个寄存器D.一共有32个运算器和控制器二、判断题1.第五代计算机的体积进一步缩小,性能进一步提高,发展了并行技术和多机系统,出现了精简指令集计算机RISC。
( F )2.单片机是把CPU、一定数量的存储器芯片和I/O接口芯片装在一块印刷电路板上,在该板上再配以具有一定功能的输入、输出设备。
(F )3.总线是多个部件间的公共连线,信号可以从多个源部件中的任何一个通过总线传送到多个目的部件。
(T )4.冯·诺伊曼计算机在硬件上是由运算器、控制器、存储器、输入和输出设备5大部分组成。
(T )5.在计算机内部可直接运行二进制数、十进制数、十六进制数。
(F )三、简答题1.简述微处理器的发展概况,从集成度、性能等方面比较各代处理器的特点。
2.简述冯·诺伊曼型计算机的基本组成。
3.名词(概念)简释:微处理器、微型计算机、微型计算机系统、单总线结构、双总线结构、双重总线结构、总线。
4.简述计算机硬件与软件的关系。
微机原理及接口第9章习题解答

第9章习题解答1、选择题(1)在数据传送过程中,数据由串行变并行或由并行变串行,其转换是通过()A.锁存器B.加法器C.移位寄存器D.数据寄存器(2)在远距离串行通信中,采用调制技术是为了使信号()A.强度加大B.不失真传送C.一位一位传送D.有条不紊传送(3)微处理器通过数据总线向慢速外设输出数据时,接口部分必须含有的部件是()A.反相器B.放大器C.锁存器D.TTL/EIA电平转换器(4)串行接口与设备之间的数据传输是以串行方式并且以()A.单工方式进行的B.半双工方式进行的C.全双工方式进行的D.半/全双工方式进行的(5)甲乙两台计算机近距离通过RS一232C口进行通讯时,常采用最简单的三线联结。
即是()A.甲机的TXD、RXD、GND分别与乙机的TXD、RXD、GND相连B.甲机的TXD、RXD、GND分别与乙机的RXD、TXD、GND相连C.甲机的RTD、TXD、RXD分别与乙机的RTS、TXD、RXD相连D.甲机的DSR、RXD、DTR分别与乙机的DSR、RXD、DTR相连2、什么是比特率、波特率?解:比特率指每秒传送的二进制位数。
波特率指每秒传送的信息位数量。
3、如果串行传输速率是2400波特,数据位的时钟周期是多少秒?数据位的时钟周期是 = 4.17×10-4秒4、若8251A的收发时钟(RxC、TxC)频率为38.4KHz,它的RTS和CTS 引脚相连。
工作在半双工异步通信,每帧字符的数据位数为7,停止位数为1,偶校验,波特率为600b/s,处于发送状态。
写出初始化程序,其端口地址为02C0H和02C1H。
38.4K = n * 600 ,得分频系数为64MOV DX,02C1HMOV AL,01111011 ;方式字OUT DX,ALMOV AL,00110001 ;控制字OUT DX,AL5、设8251A为异步工作方式,波特率因数为16,7位/字符,奇校验,两位停止位。
微机原理与接口技术 第九章 课后答案
第九章参考答案1.串行通信有什么特点?它适合于什么应用场合?若你的计算机要接入Internet网,应该采用并行传输还是串行传输?答:串行通信的特点:数据位依次传送。
传送相同字节数信息时,串行传送的时间远大于并行传送的时间;但数据线的根数较少。
串行传送有固定的传输格式。
适合于远距离传输。
计算机要接入Internet网时,应采用串行传输。
2. 设异步传送数据时,每个字符对应1位起始位,1位停止位,7位数据位和1位校验位,如果波特率是9600b/s,则每秒最多能传输多少字符?答:根据给定条件知:每个字符包含10位,因此每秒最多能传输的字符个数是:9600÷10=9603.叙述单工、半双工和全双工通信方式以及波特率含义。
答:单工:联系通信双方只有一根数据线,数据只能朝一个方向发送。
半双工:联系通信双方只有一根数据线,但允许数据分时在两个方向传送。
全双工:联系通信双方有两根数据线,允许数据同时进行双向传送。
波特率:每秒钟内传送二进制数据的位数。
4.简要说明RS-232C、RS-422、RS-485的特点。
答:RS-232C的特点:信号线少;多种波特率可选择;传送的距离一般可达30米,采用光电隔离的20mA的电流环传送时可达1000m;采用负逻辑电平,“1”电平为:-5V~-15V,“0”电平为+5V~+15V。
RS-422、RS-485的特点:采用平衡输出的发送器和差分输入的接收器;可在1200m范围内传输;发送端与接收端之间没有直接的地线连接。
5.假定8251A工作于异步方式,波特率因子为16,数据位7位,奇校验,允许发送和接收数据,其端口地址为E0H(C/D=0),E1H(C/D=1)。
试编写初始化程序。
略去软复位的初始化程序:MOV DX, 00E1HMOV AL, 01011010BOUT DX, ALMOV AL, 01010101BOUT DX, AL6.设一数据传输率为4800波特的串行打印机通过8251A与8086CPU组成的微机系统相连,打印机只有一串行数据通道,编写一个将起始地址为DATA的80个字符输出到打印机去的发送程序。
微机原理与应用第九章
;定义ICW2 ;定义ICW3 ;定义ICW4 ;定义OCW1
IR3上接有从 8259A
采用特殊完全嵌套方式、非 自动EOI结束方式、非缓冲方式
;定义OCW2
中断屏蔽字11010110
从8259A的初始化程序段
ICW1标志
MOV MOV OUT MOV MOV OUT MOV OUT MOV OUT MOV OUT MOV MOV OUT
中断请求的优先级别以循环方式类推。
例:假设当前正在处理IR2和IR6引入的中断请求,
中断源 ISR 内容 优先级 ISR 内容 优先级 ISR 内容 优先级 IR7 ISR7 0 7 0 4 0 0 IR6 ISR6 1 6 1 3 0 7 R5 ISR5 0 5 0 2 0 6 IR4 ISR4 0 4 0 1 0 5 IR3 ISR3 0 3 0 0 0 4 IR2 ISR2 1 2 0 7 0 3 IR1 ISR1 0 1 0 6 0 2 IR0 ISR0 0 0 0 5 0 1
ICW2
由当前的中断请求 IR7—IR0确定
ICW2的标志
A0 D7 D6 D5 D4 D3 D2 D1 D0 1 S7 S6 S5 S4 S3 S2 S1 S0
A0 1
D7 D6 D5 D4 D3 D2 D1 D0 0 0 0 0 0 ID2ID1ID0
从8259A的识别地址
1:表示IR端接有从8259A 0:表示IR端未接从8259A
2 1 ADI SNGL IC4
0
1:需要设置ICW4
0:不需要设置ICW4
标 志 位
1:单级使用 0:级联使用 1:调用地址间隔为4 0:调用地址间隔为8
ICW1的标志
1:电平触发 0:边缘触发
微机原理与接口技术9章8253

定时器/计数器
• 主要内容
– 定时与计数 – 可编程定时器/计数器接口芯片8253
定时与计数
• 定时技术在微机系统中必不可少
– 微机的工作在标准时钟控制下完成 – 为外设提供实时时钟 – 向外设定时发出控制信号
• 定时中断、定时检测、定时扫描、定时显示……
– 对外部事件进行计数
定时与计数
• 定时与计数
可编程定时/计数芯片8253
• 8253的工作方式
– 方式4——软件触发的选通信号发生器
• 波形图
可编程定时/计数芯片8253
• 8253的工作方式
– 方式4——软件触发的选通信号发生器
• 工作特点
– 计数由软件启动,每次写入计数初值只启动一次 计数 – 当计数值为N时,则间隔N+1个CLK脉冲输出一 个负脉冲(计数一次有效) – 在计数过程中,可由GATE信号控制暂停。当 GATE=0时,暂停计数;当GATE=1时,继续计 数 – 在计数过程中写入新的计数初值,则按新的初值 重新开始计数
可编程定时/计数芯片8253
• 8253的工作方式
– 方式5——硬件触发的选通信号发生器
• 波形图
可编程定时/计数芯片8253
• 8253的工作方式
– 方式5——硬件触发的选通信号发生器
• 工作特点
– 计数由GATE上升沿启动,只要GATE端给触 发脉冲,则会装入计数值,并开始计数 – 在这种方式下,若设置的计数值是N,则在 GATE脉冲后,经过(N+1)个CLK,OUT端 才输出一个负脉冲 – 在计数过程中修改计数初值,不会影响本次计 数,只有GATE端再次触发时,才按新的计数 值计数
微机原理与接口技术
第九章 8253
微机原理习题集答案
第1章 概述1.电子计算机主要由.电子计算机主要由 运算器运算器 、 控制器控制器 、 存储器存储器 、 输入设备输入设备 和 输出设备输出设备 等五部分组成。
等五部分组成。
等五部分组成。
2. 运算器运算器 和 控制器控制器 集成在一块芯片上,被称作CPU CPU。
3.总线按其功能可分.总线按其功能可分 数据总线数据总线 、 地址总线地址总线 和 控制总线控制总线 三种不同类型的总线。
三种不同类型的总线。
4.计算机系统与外部设备之间相互连接的总线称为.计算机系统与外部设备之间相互连接的总线称为 系统总线(或通信总线)系统总线(或通信总线) ;用于连接微型机系统内各插件板的总线称为系统内总线(板级总线) ; CPU 内部连接各寄存器及运算部件之间的总线称为内部连接各寄存器及运算部件之间的总线称为 内部总线内部总线 。
5.迄今为止电子计算机所共同遵循的工作原理是迄今为止电子计算机所共同遵循的工作原理是 程序存储程序存储 和 程序控制程序控制 的工作原理。
的工作原理。
这种原理又称这种原理又称为 冯·诺依曼型冯·诺依曼型 原理。
原理。
第3章 微处理器及其结构1.8086/8088 CPU 执行指令中所需操作数地址由执行指令中所需操作数地址由 EU EU EU 计算出计算出计算出 16 16 16 位偏移量部分送位偏移量部分送位偏移量部分送 BIU BIU BIU ,由,由,由 BIU BIU BIU 最后最后形成一个形成一个 20 20 20 位的内存单元物理地址。
位的内存单元物理地址。
2.8086/8088 CPU CPU在总线周期的在总线周期的在总线周期的T1 T1 T1 时刻,用时刻,用时刻,用A19/S6A19/S6A19/S6~~A16/S3 A16/S3 输出输出输出 20 20 20 位地址信息的最高位地址信息的最高位地址信息的最高 4 4 4 位,而在位,而在其他时钟周期,则输出其他时钟周期,则输出 状态状态 信息。
微机原理 单片机 第9章 80C51单片机的模拟量接口

一、0832内部结构及引脚信号 DAC0832是20引脚双列直插式芯片,内部结构和 引脚信号如图所示。
4、建立时间 • 建立时间是指输入的数字量发生满刻度变化时, 输出模拟信号达到满刻度值的±1/2LSB所需的时间。 是描述D/A转换速率的一个动态指标。 电流输出型DAC的建立时间短。电压输出型DAC的建 立时间主要决定于运算放大器的响应时间。根据建 立时间的长短,可以将DAC分成超高速(<1μS)、 高速(10~1μS)、中速(100~10μS)、低速 (≥100μS)几档。 应当注意,精度和分辨率具有一定的联系,但概 念不同。DAC的位数多时,分辨率会提高,对应于 影响精度的量化误差会减小。但其它误差(如温度 漂移、线性不良等)的影响仍会使DAC的精度变差。
二、DAC0832与80C51单片机的接口 1、单缓冲工作方式
此方式适用于只有一路模拟量输出,或有几路模 拟量输出但并不要求同步的系统。
P2.7
CS XFER DI0 DI7
DAC0832
80C51
P0 WR VSS
VCC ILE Rfb IOUT1 IOUT2
+5V 1kΩ 1MΩ
WR1 WR2 DGND
DAC0832内部结构及引脚
DI7~DI0 VREF
输入 锁存器 DAC 寄存器 D/A 转换器
IOUT2 IOUT1
ILE & CS & WR1
LE1 &
LE2 Rfb
AGND
微机原理与接口技术9章(DMA控制器)

DMA控制器8237A
• 8237的引脚
– 其他
• EOP :双向,当字节数计数器减为0时,在 上输出一个有效的低电平脉冲,表明DMA传 送已经结束;也可接收外部的信号,强行结 束8237的DMA操作或者重新进行8237的初始 化 • CLK:时钟信号输入,对于标准的8237,其输 入时钟频率为3MHz • READY:输入,高电平表示传送准备好。可用 来在DMA传送周期中插入等待状态 • RESET:输入,复位信号。芯片复位时,屏蔽 寄存器被置1,其他寄存器均清零,8237工作 于空闲周期SI
– DMAC是控制存储器和外设之间直接高速传送数 据的硬件 – DMAC应具备的功能
• 能接受外设的DMA请求信号,并向外设发出DMA响 应信号 • 能向CPU发出总线请求信号,当CPU发出总线保持响 应信号后,能够接管对总线的控制权 • 能发出地址信息,对存储器寻址并修改地址 • 能向存储器和外设发出读/写控制信号 • 能控制传输的字节数,并判断传送是否结束 • 能发出DMA结束信号,DMA传送结束后,能释放总 线,让CPU重新获得总线控制权
DMA控制器8237A
• 8237的引脚
– 读写控制信号
• MEMR、MEMW:输出信号,控制对存储器的 读写 • IOW 、IOR :双向信号
– 输入信号:CPU向8237写控制字或读8237状态 – 输出信号:8237控制对外设的读写
DMA控制器8237A
• 8237的引脚
– 数据地址信号
• DB0~DB7:既是CPU向8237的数据通道(输入或输出);主动状 态时为向存储器输出的高8位地址A8~15 • A0~7:分两部分 – A0~3为双向,由CPU输入时选择8237的端口 – 输出时A0~3和A4~7一起输出存储器低8位地址 • ADSTB:正脉冲输出,地址选通信号,将DB0~7中的高8位地址信 号锁存到外部锁存器中 • AEN:高电平输出,地址输出允许,由它把锁存在外部锁存器中 的高8位地址送入系统的地址总线,同时禁止其它系统驱动器使 用系统总线 • CS :输入信号,片选信号
微机原理习题答案9章.docx
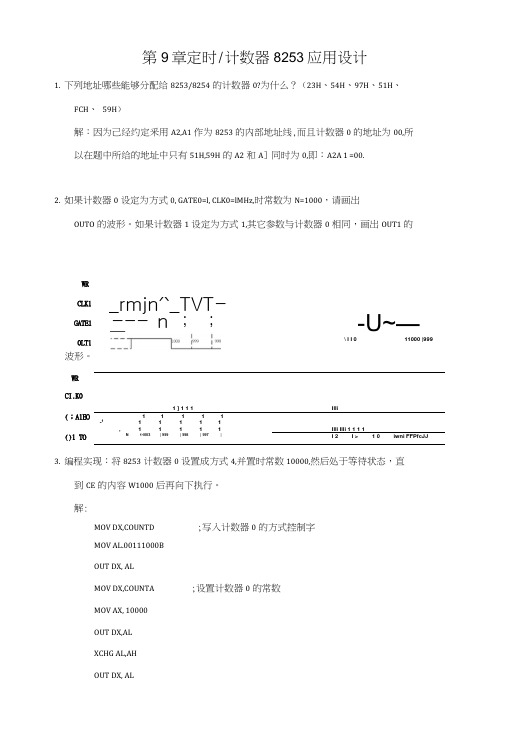
第9章定时/计数器8253应用设计1. 下列地址哪些能够分配给8253/8254的计数器0?为什么?(23H 、54H 、97H 、51H 、FCH 、 59H )解:因为己经约定釆用A2,A1作为8253的内部地址线,而且计数器0的地址为00,所 以在题中所给的地址中只有51H,59H 的A2和A ]同时为0,即:A2A 1 =00.2. 如果计数器0设定为方式0, GATE0=l, CLK0=lMHz,时常数为N=1000,请画出OUTO 的波形。
如果计数器1设定为方式1,其它参数与计数器0相同,画出OUT1的波形。
WR CI.K0 1 ] 1 1 1Illi(;A1EO 1 1 1 1 1-11 1 1 1 1 ,111 11Illi Illi 1 1 1 1 ()1 TON11003| 999| 998| 997|I 2 I > 1 0iwni FFPfcJJ3. 编程实现:将8253计数器0设置成方式4,并置时常数10000,然后处于等待状态,直到CE 的内容W1000后再向下执行。
解:MOV AL.00111000B OUT DX, AL MOV DX,COUNTA MOV AX, 10000 OUT DX,AL XCHG AL,AH OUT DX, ALWR CLK1 GATE1 0LT1_rmjn^_TVT- --- n ; ; -U~—\ I I 011000 |999MOV DX,COUNTD;写入计数器0的方式控制字;设置计数器0的常数MOV AL,OHOUT DX,ALMOV DX,COUNTA ;读入CEIN AL,DXMOV AH,ALIN AL,DXXCHG AL,AHCMP AX J 000 ;判别CE当前大小JAL14.利用8253 nf以实现确定时间的延迟,编程实现延时10秒的程序段(设可以使用的基准时钟为lMHz)o解:本题使用计数器0和计数器1,并且计数器0的输出OUTO作为计数器1的时钟输入CLK1.程序如下:MOV DX,COUNTD;写计数器0方式控制字MOV AL,00110I00BOUT DX,ALMOV DX,COUNTAMOV AX, 10000;写计数器0时常数,分频得到100Hz时钟频率OUT DX,ALXCHG AL,AHOUT DX,ALMOV DX,COUNTD;写计数器1方式控制字MOV AL,01110000BOUT DX,ALMOV DX, COUNTBMOVAX,999;分频得到0.1Hz吋钟频率。
第9章_微机原理与接口技术答案欧青立编

第9章微机中断技术习题9.1 简述一般中断系统的组成和功能。
【参考答案】处理器内部应有中断请求信号的检测电路,输出中断响应信号,保存断点的逻辑,转向中断处理程序的逻辑,中断返回逻辑。
系统中要有一中断控制器,管理多个中断源,提供处理机所需的中断处理信息。
系统中请求中断处理的I/O接口电路要有提供中断请求信号及接收中断响应信号的逻辑。
9.2 什么是中断?简述一个中断的全过程。
【参考答案】中断是指在CPU正常运行程序时,由于内部或外部某个非预期事件的发生,使CPU暂停正在运行的程序,而转去执行处理引起中断事件的程序,然后返回被中断了的程序,继续执行被暂停的程序的过程。
当外设准备好向CPU传送数据或已准备就绪接收CPU的数据,或者有某些紧急情况需要CPU处理时,外设向CPU发出中断请求。
CPU接收到中断请求,在一定条件下,暂且停止执行当前的主程序,转到中断服务程序为外设服务;服务结束后返回并继续执行主程序。
微机的中断过程包括中断请求、中断响应、保护断点与现场、中断服务和中断返回等5个环节。
9.3 确定中断的优先级有哪两种方法?各有什么优缺点?IBM PC系列微机中断判优使用的是什么方法?【参考答案】确定中断的优先级有软件查询和硬件排队两种方法。
硬件排队方法中常用的是矢量中断方法。
软件查询方法所需电路比较简单:一是要把外设的中断请求触发器组合成一个端口供CPU查询,二是要将各外设的中断请求信号相或后作为CPU的中断请求信号送INTR引脚。
在外设数量较多时.这位查询转人中断服务所耗费的时间较长。
硬件优先权排队方法电路较复杂,要求外没不仅发出中断请求信号,而且还需提供设备的中断矢量(也称中断类型号),该矢量与中断服务程序地址有关,CPU接收该矢量后可以转入中断服务程序。
这种方法中断响应速度快。
IBM PC系列微机中采用硬件优先权排队电路,具体来说,IBM PC系列微机中断判优采用的矢量中断方法。
IBM PC系列微机中断判优用的是中断控制器8259A,其内部集成了可编程改变的请求优先级电路及编码比较电路,既可以处理中断的优先级、也可以处理中断嵌套的优先级。
微机原理第9章习题与答案
习题一、选择题1.对8255A的C口执行按位置位/复位操作时,写入的端口地址是______。
A. 端口AB.端口BC. 端口CD. 控制口答案:D2.要将8255A的3个8位的I/O端口全部设定为方式0的输入,其设置的方式控制字为____。
答案:D3.当8255A的A口工作在方式1,B口工作在方式1时,C口仍然可按根本的输入输出方式工作的端口线有_________条。
答案:B4.当8255A端口PA、PB分别工作在方式2、方式1时,其PC端口引脚为_______。
答案:C5.如果8255A的端口A工作在双向方式,这时还有_____根I/O线可作其他用。
答案:A4~PC7全部为输出线时,说明8255A的A端口工作方式是______。
答案:A7.8255A中既可以作为数据输入、输出端口,又可以提供控制信息、状态信息的端口是____。
A. 端口AB.端口BC. 端口CD. 控制口答案:C8. 8255A的端口A和端口B工作在方式1输出时,与外部设备的联络信号将使用____信号。
A. INTRB.ACKC. INTED. IBF答案:B二、填空题1. 当8255A的A口工作于方式1输入,B口工作于方式0时,C口的_____位可以作为输入输出口使用。
答案:5位2.假设要求8255A的A、B口工作在方式1,作为输入,C口作为输出,那么输入8255A控制口的控制字为______。
答案:B6H3.假设8255A的端口B工作在方式1,并为输出口,置位PC2的作用为______。
答案:允许端口B输出中断4.当数据从8255A的端口C往数据总线上读出时,8255的几个控制信号CS、A1、A0、RD、WR分别是__________________。
答案:0 1 0 0 15. 8255A在方式0工作时,端口A、B和C的输入输出可以有_______种组合。
答案:16三、问答题8255A和外设之间有几个数据端口?在结构上有什么区别?答案:3个数据端口这3个端口与外设的数据接口都是8位,但功能不完全相同。
单片微机原理及应用徐春辉第9章习题答案综述

练习与思考题9 参考答案1. A T89S51单片机中与定时器/计数器相关的特殊功能寄存器有哪几个?它们的功能各是什么?答:A T89S51单片机中与定时器/计数器相关的特殊功能寄存器有TMOD 、TCON 、IE 、IP 、TH0、TL0、TH1、TL1等8个。
TMOD 用于设定定时器/计数器的工作模式与工作方式;TCON 用于提供定时器/计数器启动或停止的软开关,另外还提供定时器/计数器的溢出标志位;IE 、IP 提供对定时器/计数器的溢出中断进行管理的控制位;TH0、TL0、TH1、TL1用于对定时器/计数器的初始值进行设定并实现对输入的计数信号进行计数的功能。
2. A T89S51单片机内设有几个可编程的定时器/计数器?它们可以有哪几种工作模式?哪几种工作方式?如何选择和设定?各有什么特点?答:A T89S51单片机内部有两个16位可编程的定时器/计数器,即定时器T0和定时器T1它们可以有定时和计数两种工作模式,由TMOD 中的C/T 位设定。
C/T =0为定时器模式,C/T =1为计数器模式。
每种工作模式下又有如下表所示的四种工作方式。
定时器/计数器四种工作方式由TMOD 中的M1 M0两位确定,如下表所3. 如果采用晶振的频率为3MHz ,定时器/计数器工作在方式0、1、2下,其最大的定时时间为多少?答:因为机器周期)(410312126s f T OSC cy μ=⨯==, 所以定时器/计数器工作方式0下,其最大定时时间为2)(192.81042261313ms T T C MAX =⨯⨯=⨯=-;同样可以求得方式1下的最大定时时间为262.144ms ;方式2下的最大定时时间为1024ms 。
4. A T89S51单片机内的定时器/计数器T0、T1工作在方式3时,有何不同?答:方式3对定时器T0和定时器T1是不相同的。
若T1设置为方式3,则停止工作。
方式3只适用于T0。
当T0设置为方式3时,将使TL0和TH0成为两个相互独立的8位计数器, TL0利用了T0本身的一些控制方式,它的操作与方式0和方式1类似。
微机原理 第九章 面向系统的输入 输出接口

青岛理工大学琴岛学院
9.2 Intel 可编程中断控制器8259A
中断控制器8259A的功能:
可管理8个中断源电路的中断,并能对其进行 优先级管理。 用9片8259A可组成主从式中断系统,管理64 个中断源电路的中断,并能对其进行优先级管 理。 对中断源有屏蔽或允许申请中断的操作。 能自动送出中断类型号,使CPU迅速找到中断 服务程序的入口地址。
专用 中断向量 (5 个)
00008H 00004H
0 号向量(除法错)
00000H
CS IP
16 位
青岛理工大学琴岛学院
硬件中断
非屏蔽中断的类型号为2,所以非屏蔽中断的入 口地址放在0段的0008H、0009H、000AH和 000BH四个单元中; 非屏蔽中断一般用来处理系统的重大故障,比如 系统掉电处理常常通过非屏蔽中断处理程序执 行; 非屏蔽中断子程序一般采用的措施:
青岛理工大学琴岛学院
9.2.1 8259A结构及引脚功能
28条引脚,双列直插式 封装 分为四组使用
8259A
青岛理工大学琴岛学院
结构框图
INTA INT D7~D0 数据总线 缓冲器 控制电路
RD WR A0 CS
/写 读读 /写 控制 控制逻辑 电路 中断 服务 寄存器 ISR 优先权 判别 电路 PR 中断 请求 寄存器 IRR
第9章 面向系统的输入/输出接口
青岛理工大学琴岛学院
中断系统
中断:是指CPU在执行当前程序的过程中,由 于某种随机出现的外围设备的请求,使得CPU 暂时停止正在执行的程序(即中断),转去执 行为外围设备服务的程序。当为外围设备服务 的程序执行完后,CPU再返回到暂时停止的程 序处(即断点),继续执行原来的程序,这就 是通常所说的外部中断。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第九章习题与思考题
9.1 解:异步通信是字符帧通信,通信原理是(1)发送/接收端有两个相互独立时钟源;(2)接收端检测到RXD线=(起始位),接收端便知发送端已开始发送。
同步通信靠同步头通信,通信原理是接收端检测RXD线上有同步头便知对方已开始发送。
分类有单(1)个同步头通信(如:16H)、双(2)个同步头通信(如:EB90H)。
MCS—51串行口无同步通信功能。
9.3 解:串行通信的制式:(1)半双工(1条传输线):A站发,B站收;B站发,A站收。
(2)全双工(2条传输线):A和B站同时收/发。
9.5 解:
9.7 解:USART的出错标志:
1)PE(奇偶错)标志:PE=0正确,PE=1奇偶错;
2)FE(帧错)标志:FE=0正确,FE=1帧错(所收停止位非1);
3)OE(溢出错)标志:OE=0正确,OE=1溢出错(后收字符覆盖前收字符)。
9.9 解:SM2的含义:SM2=0——单机(方式0/1下使用);SM2=1——多机(方式2/3下使用)。
方式1下:SM2=0时,若接收电路接收到第9数据位(停止位)为“1”,则接收数据送SBUF (接收)、RB8=停止位和RI=1,并发串口中断。
方式2/3下:SM=0时,串口以单机接收/发送,RI和TI被激活,但无中断;SM2=1、RB8=1和RI=0时,RI可被激活,并可发串口中断。
9.11 解:
1)方式0(同步移位寄存器)
发送(TI=0)时,TXD——同步脉冲发完一帧TI=1
RXD——发送数据发串口中断
接收(RI=0和REN=1)时TXD——同步脉冲收完一帧RI=1
RXD——接收数据发串口中断
2)方式2(10位异步收发,波特率可变)
发送(TI=0)时,发完一帧后(TI=1)产生串口中断。
接收(RI=0和REN=1)时一帧收完:若RI=0 则接收有效,发中断
SM2=0 收到停止位
3)方式2/3(11位异步收发)
方式2:波特率固定;
方式3:波特率可变,发送时(TI=0),发完1帧,TI=1,但不产生串口中断;接收是(RI=0),若RI=0和SM2=0/RB8=1,则接收有效(RI=1)。
9.13 解:ORG 2100H
TBLOCK DATA 2000H
LEN DATA 30
START MOV TMOD, #20H ;T1为方式2
MOV TL1, #0E8H ;时间常数初值送T1
MOV TH1, #0E8H ;波特率为600bps
MOV PCON, #00H ;SMOD=0
SETB TR1 ;启T1
MOV SCON, #40H ;串口为方式1
MOV DPTR, #TBLOCK;字块始址送DPTR
MOV A, #LEN ;块长送R2
MOV R2, A
MOV SBUF, A ;发LEN字节
SETB EA ;开所有中断
W AIT : SETB ES ;允许串口中断
SJMP W AIT ;等待中断
中断服务程序为:
ORG 0023H
LJMP TXSVE ;转发送程序
ORG 2150H
TXSVE : CLR ES ;关串口中断
CLR TI ;清TI
MOVX A, @DPTR
ANL A, #7FH ;去掉最高位
MOV C, PSW, O ;形成偶校检码
MOV ACC, 7, C ;送ACC.7
MOV SBUF, A ;启动发送
DJNZ R2, NEXT ;若未发完,则NEXT
SJMP $
NEXT : INC DPTR ;字块指针加1
RETI ;中断返回
END
9.15 解:ORG 1000H
TBLOCK DATA 2000H
LEN DATA 30
START : MOV SCON, #80H ;串口方式2
MOV PCON, #00H ;SMOD=0(fose/32)
MOV R2, #LEN ;块长送R2
MOV DPTR, #TBLOCK ;块始址送DPTR
MOVX A, @DPTR ;第一发送字符送A
MOV C, P ;奇偶校验位送C
MOV TB8, C ;送入发送数据第九位TXD : MOV SBUF, A ;发送第一字符
SETB EA ;开所有中断WAIT : SETB ES ;开串口中断
SJMP W AIT ;等待中断
中断服务程序为:
ORG 0023H
LJMP TXSVE ;转发送程序
ORG 1100H
TXSVE : CLR ES ;关串行口
CLR TI ;清TI
DJNZ R2, NEXT ;若未发完,则NEXT
CLR EA ;若发完,则关所有中断
SJMP DOEN
NEXT : INC DPTR ;发送缓冲器加1
MOVX A., @DPTR ;下一发送符送A
MOV C, P ;奇偶检验位送C
MOV TB8, C ;送入发送数据第九位
MOVE SBUF, A ;启动发送下一字符
DOEN : RETI
END
9.17 解:1)星型;2)环形;3)串行总线型;4)主从式多机型。
9.19 解:
1)主机在通信前通过程序向P1.0发1负脉冲,经过1488和1489向各从机请求中断;
2)各从机仅在收到INT1上中断请求后进入相应中断服务程序,被寻址从机在中断服务程序中对收到的从机地址进行识别和完成通信,未被寻址的从机就使SM2=1后返回主程。
故从机的工作效率得到大大的提高。
9.21 解:光纤通信的优点:
1)通信容量大,是微波通信的10万倍,是同轴电缆的1万倍,一根光纤可传送122880路电话。
2)传输损耗低,带宽为2.6GHZ的光纤的传输损耗只有0.2db/km,中继站间隔可达100km。
3)体积小、重量轻和铺设简单,一公斤石英玻璃可拉制100公里长的光纤。
4)不受电磁干扰,不怕雷击,无法窃听。
5)不需接地,无共地干扰,能耐高温,不会产生短路故障。