基于单片机的步进电机控制系统(1)
基于单片机的步进电机控制系统设计

中国地质大学(武汉)远程与继续教育学院本科毕业论文(设计)指导教师指导意见表学生姓名:学号:专业:电气工程及其自动化毕业设计(论文)题目:基于单片机的步进电机控制系统设计中国地质大学(武汉)远程与继续教育学院本科毕业设计(论文)评阅教师评阅意见表学生姓名:学号:专业:电气工程及其自动化毕业设计(论文)题目:基于单片机的步进电机控制系统设计论文原创性声明本人郑重声明:本人所呈交的本科毕业论文《基于单片机的步进电机控制系统设计》,是本人在导师的指导下独立进行研究工作所取得的成果。
论文中引用他人的文献、资料均已明确注出,论文中的结论和结果为本人独立完成,不包含他人成果及使用过的材料。
对论文的完成提供过帮助的有关人员已在文中说明并致以谢意。
本人所呈交的本科毕业论文没有违反学术道德和学术规范,没有侵权行为,并愿意承担由此而产生的法律责任和法律后果。
论文作者(签字):日期:2014 年9 月 1 日摘要本文应用单片机、步进电机驱动芯片、执行部件等,构建了集步进电机控制器和驱动器为一体的步进电机控制系统。
二维工作台作为被控对象通过步进电机驱动滚珠丝杆在X/Y轴方向联动。
文中讨论了一种以最少参数确定一条圆弧轨迹的插补方法和步进电机变频调速的方法。
步进电机控制系统的开发采用了软硬件协同仿真的方法,可以有效地减少系统开发的周期和成本。
最后给出了步进电机控制系统的应用实例。
目录一、绪论 (5)(一)引言 (5)(二)步进电机常见的控制方案与驱动技术简介 (6)(三)本文研究的内容 (9)二、步进电机概述 (11)(一)步进电机的分类 (11)(二)步进电机的工作原理 (11)三、系统的硬件设计 (16)(一)系统设计方案 (16)(二)单片机最小系统 (17)(三)串口通信模块 (22)(四)数码管显示电路设计 (23)(五)电机驱动模块设计 (25)(六)驱动电流检测模块设计 (27)(七)独立按键电路设计 (32)四、系统的软件实现 (33)(一)系统软件主流程图 (33)(二)系统初始化流程图 (33)(三)按键子程序 (34)(四)系统组成 (37)(五)程序设计 (39)五、结论 (56)(一)具体结论 (56)(二)后续工作 (56)致谢 (57)参考文献 (58)一、绪论(一)引言步进电动机又称脉冲电动机或阶跃电动机,国外一般称为Steppingmotor、Pulse motor或Stepper servo,其应用发展已有约80年的历史。
毕业设计论文 基于单片机的步进电机控制器

第1章绪论 (2)1.1引言 (2)1.2步进电机常见的控制方案与驱动技术简介 (4)1.2.1常见的步进电机控制方案 (4)1.2.2步进电机驱动技术 (6)1.3本文研究的内容 (8)第2章步进电机概述 (9)2.1步进电机的分类 (9)2.2步进电机的工作原理 (10)2.2.1结构及基本原理 (10)2.2.2两相电机的步进顺序 (10)2.3 步进电机的工作特点 (13)2.4本章小结 (15)第3章系统的硬件设计 (16)3.1系统设计方案 (16)3.1.1系统的方案简述与设计要求 (16)3.1.2系统的组成及其对应功能简述 (16)3.2单片机最小系统 (18)3.2.1AT89S51简介 (18)3.2.2单片机最小系统设计 (23)3.2.3单片机端口分配及功能 (24)3.3串口通信模块 (24)3.4数码管显示电路设计 (25)3.4.1共阳数码管简介 (25)3.4.2共阳数码管电路图 (26)3.5电机驱动模块设计 (27)3.5.1L298简介 (27)3.5.2电机驱动电路设计 (28)3.6驱动电流检测模块设计 (30)3.6.1OP07芯片简介 (30)3.6.2ADC0804芯片简介 (32)3.6.3电流检测模块电路图 (35)3.7独立按键电路设计 (36)3.8本章小结 (36)第4章系统的软件实现 (37)4.1系统软件主流程图 (37)4.2系统初始化流程图 (38)4.3按键子程序 (39)结论 (43)1第1章绪论1.1引言步进电动机又称脉冲电动机或阶跃电动机,国外一般称为Steppingmotor、Pulse motor或Stepper servo,其应用发展已有约80年的历史。
步进电机是一种把电脉冲信号变成直线位移或角位移的控制电机,其位移速度与脉冲频率成正比,位移量与脉冲数成正比。
步进电机在结构上也是由定子和转子组成,可以对旋转角度和转动速度进行高精度控制。
毕业设计(论文)-基于AT89C51单片机的步进电机控制系统

内蒙古科技大学本科生毕业设计说明书(毕业论文)题目:基于AT89C51单片机的步进电机控制系统设计学生姓名:学号:专业:自动化班级:自动化06-3班指导教师:基于AT89C51单片机的步进电机控制系统摘要步进电机是数字控制系统中的一种执行元件,它能按照控制脉冲的要求,迅速起动,制动,正反转和调速。
具有步距角精度高,停止时能自锁等特点,因此步进电机在自动控制系统中,特别是在开环的控制系统中得到了日益广泛的应用。
本文以单片机和环形脉冲分配器为核心设计的步进电机控制系统,通过软硬件的设计调试,实现步进电机能根据设定的参数进行自动加减速控制,使控制系统以最短的时间到达控制终点,而又不发生失步的现象;同时它能准确地控制步进电机的正反转,启动和停止。
硬件是以AT89C51单片机为核心的控制电路,主要包括:环形脉冲分配器、键盘显示电路、步进电机的驱动电路等。
软件部分采用C语言编程,主要包括键盘显示程序、步进电机的调速程序、停止判断程序等。
关键词:步进电机控制系统;调速;单片机Based on AT89C51 Single-chip ComputerStepping Motor Control SystemAbstractStepping motor is a kind of digital control system components. It can achieve quick start-up, positive inversion, stopping and speed control, according to the control pulse. It has high precision step angle, and can be self-locking when it keeps still. As these characteristics, stepping motor in automatic control system, especially in the open loop control system has been widely applied.This article mainly focuses on taking Single-chip Computer and cycle pulse distributor as the core, and designing the stepping motor control system. Through the design of the software and hardware debugging, it realizes controlling the step motor’s acceleration and deceleration automatically, according to parameter setting. Making the system arrive the end point with the shortest time, but not occur outing of step. Besides it can accurately achieve start-up, positive inversion and shutdown. Hardware takes AT89C51 as the core of control circuit, mainly including: cycle pulse distributor, keyboard and display circuit, stepping motor driving circuit, etc. Software part adopts the C language programming, mainly including keyboard and display program, stepping motor speed control program, stop judging program, etc.Key words: Stepping motor control system; speed control; Single-chip Computer目录摘要 (I)Abstract (II)第一章引言 (1)1.1 课题提出的背景和研究意义 (1)1.2 课题的主要研究内容 (2)1.3 本章小结 (2)第二章步进电机控制系统设计 (3)2.1 步进电机的原理 (3)2.1.1 三相单三拍通电方式 (3)2.1.2 三相双三拍通电方式 (5)2.1.3 三相六拍通电方式 (6)2.2 环形脉冲分配器 (8)2.3 续流电路 (12)2.3.1 二极管续流 (13)2.3.2 二极管—电阻续流 (14)2.4 步进电机驱动电路 (15)2.5 步进电机的变速控制 (17)2.5.1 变速控制的方法 (19)2.6 步进电机在自动生产线中的应用 (20)2.7 本章小结 (22)第三章控制系统硬件设计 (23)3.1 硬件系统设计原则 (23)3.2 控制系统组成 (23)3.3 主要元件的选择 (24)3.3.1 单片机的选择 (24)3.3.2 EPROM的选择 (25)3.3.3 可逆计数器的选择 (27)3.4 控制系统接口电路的设计 (27)3.4.1 环形脉冲分配器设计 (27)3.4.2 显示电路设计 (29)3.4.3 外部复位电路设计 (30)3.5 控制系统整体电路设计 (31)3.6 本章小结 (31)第四章控制系统软件设计 (32)4.1 软件系统设计原则 (32)4.2 步进电机控制系统功能设计 (32)4.3 主程序设计 (33)4.3.1 主程序工作过程 (33)4.3.2 主程序工作流程图 (34)4.3.3 定时器T0中断程序流程图 (34)4.4 Proteus仿真 (37)4.5 显示程序设计 (39)4.6 键盘程序设计 (39)4.7 调速程序设计 (41)4.7.1 20BY步进电机参数 (41)4.7.2 步进电机转速与频率的关系 (41)4.8 本章小结 (42)第五章结束语 (43)参考文献 (44)附录 (46)附录A 系统程序(C) (46)附录B 20BY步进电机转速与定时器定时常数关系表 (59)附录C 控制系统电路图 (62)致谢 (63)第一章引言1.1 课题提出的背景和研究意义由于步进电机不需要位置传感器或速度传感器就可以实现定位,即使在开环状态下它的控制效果也是令人非常满意的,这有利于装置或设备的小型化和低成本,因此步进电机在计算机外围设备、数控机床和自动化生产线等领域中都得到了广泛的应用。
基于单片机ULN2003的步进电机控制系统(汇编及C语言程序各一个)

1.3.4软件设计速、加速信号和方向信号,因而采用中断方式效率最高,这样总共要完成 4个部 分的工作才能满足课题要求,即主程序部分、定时器中断部分、外部中断0和外部中断1部分,其中主程序的主要功能是系统初始参数的设置及启动开关的检测, 若启动开关合上则系统开始工作,反之系统停止工作;定时器部分控制脉冲频率, 它决定了步进电机转速的快慢;两个外部中断程序要做的工作都是为了完成改变 速度这一功能。
下面分析主程序与定时器中断程序及外部中断程序。
(1) 主程序设计主程序中要完成的工作主要有系统初始值的设置、系统状态的显示以及各种 开关状态的检测判断等。
其中系统初始状态的设置内容较多,该系统中,需要初始化定时器、外部中断;对P1 口送初值以决定脉冲分配方式,速度值存储区送初 值决定步进电机的启动速度,对方向值存储区送初值决定步进电机旋转方向等内 容。
若初始化P 1=11H 、速度和方向初始值均设为0,就意味着步进电机按四相单四拍运行,系统上电后在没有操作的情况下,步进电机不旋转,方向值显示“ 0”速度值显示“ 0”主程序流程图如图9所示。
C1iH:TC TC3 -> W需ReC2<TE>cTExTT^X2<TE><r>R5vTEKTtWflAMPCI.KADIPCI®削 D*PCUSAKRSTre.?;AP7PZITAEPZ.VAfiFZ^A-nALEFZ.4fl^-E日M*3M3FZ.T^-e Pin P1JP3IVnXDPJ.1l™p-IJPI.4 心旳P1SPliTI P1J <raacmP1Jpi.Tmis37KI10 F JIg工IlorsaT= -5-LC二r-EX图8总体电路图哥孰 ISC Si r •卞-TTWHprrr-Ex-K2lor FR4ft S通过分析可以看出,实现系统功能可以采用多种方法,由于随时有可能输入加图9主程序流程图(2)定时中断设计步进电机的转动主要是给电机各绕组按一定的时间间隔连续不断地按规律通入电流,步进电机才会旋转,时间间隔越短,速度就越快。
基于单片机的步进电机控制系统设计方案

D10-基于单片机旳步进电机控制系统一、理解什么是步进电机以及其工作原理步进电机是数字控制电机,步进电机旳运转是由电脉冲信号控制旳,其角位移量或线位移量与脉冲数成正比,每个一种脉冲,步进电机就转动一种角度(不距角)或前进、倒退一步。
步进电机旋转旳角度由输入旳电脉冲数确定,因此,也有人称步进电机为数字/角度转换器。
步进电机旳各相绕组按合适旳时序通电,就能使步进电机转动。
当某一相绕组通电时,对应旳磁极产生磁场,并与转子形成磁路,这时,假如定子和转子旳小齿没有对齐,在磁场旳作用下,由于磁通具有力图走磁阻最小途径旳特点,则转子将转动一定旳角度,使转子与定子旳齿互相对齐,由此可见,错齿是促使电机旋转旳原因。
二、步进电机旳特点(1)步进电机旳角位移与输入脉冲数严格成正比,因此当它转一转后,没有合计误差,具有良好旳跟随性。
(2)由步进电机与驱动电路构成旳开环数控系统,既非常以便、廉价,也非常可靠。
同步,它也可以有角度反馈环节构成高性能旳闭环数控系统。
(3)步进电机旳动态响应快,易于启停、正反转及变速。
(4)速度可在相称宽旳范围内平滑调整,低速下仍能保证获得很大旳转矩,因此一般可以不用减速器而直接驱动负载。
(5)步进电机只能通过脉冲电源供电才能运行,它不能直接用交流电源或直流电源。
(6)步进电机自身旳噪声和振动比较大,带惯性负载旳能力强。
三、步进电机旳控制步进电机旳控制重要包括换相次序旳控制、速度控制、速度控制、加减速控制等,控制系统就是运用单片机旳功能实现以上控制旳系统,即本次设计旳目旳。
四、示意图五、硬件设计计划本设计旳硬件电路只要包括控制电路、最小系统、驱动电路、显示电路四大部分。
最小系统只要是为了使单片机正常工作。
控制电路只要由开关和按键构成,由操作者根据对应旳工作需要进行操作。
显示电路重要是为了显示电机旳工作状态和转速。
驱动电路重要是对单片机输出旳脉冲进行功率放大,从而驱动电机转动。
(1)控制电路根据步进电机旳工作原理可以懂得,步进电机转速旳控制重要是通过控制通入电机旳脉冲频率,从而控制电机旳转速。
基于单片机的步进电机控制系统

Va l u e En g i n e e r i n g
・1 8 5・
基 于单片机 的步进 电机控制 系统
S t e p p e r Mo t o r Co n t r o l S y s t e m Ba s e d o n S i n g l e - c h i p
一
* 商 三嗣 1 a i 6 。 . 上舭 一1 时间显示在显示模块上面 , 如图 l 所示。 其 中软件 设计采 2 8 6 4图形液晶 , 会使原理 图更简 洁 , 更是 降低 了成本 , 用基于 C语言 的结构化程序设计 方法 ,是在 K e i l C 5 1 集成 及 1 因 此 P 1口用来 接 4 x 4行 列 式 键 盘 , P 2口用 来 给 1 2 8 6 4图 编译环境下编译, 结构清晰 , 具有很好的可读性和移植性 。
关键词 : 单 片机 ; 步进电机
Ke y wo r d s : S C M; s t e p p e r mo t o r
中图分类号 : T P 3 1
文献标识码 : A
文章编号 : 1 0 0 6 - - 4 3 1 1 ( 2 0 1 3) 0 5 - 0 1 8 5 - 0 2
基于单片机的步进电机控制系统实用设计
数 而不受负载变 化的影 响 , 即给 电机 加一个 脉 冲信号 , 电机 则
转 过 一 个 步 距 角 。这 一 线 性 关 系 的 存 在 , 加 上 步 进 电 机 只有 周
来改变定 时初值 , P O口接 L E D数码管 , 可 以显示 当前的电机转 速和按钮状态 , 具体 结构 如图 2 所示 。
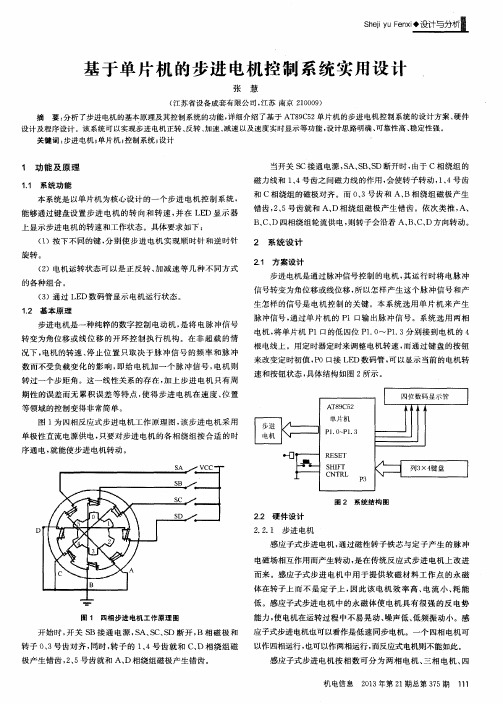
当开 关 S C接 通 电 源 , S A、 S B 、 S D断开时 , 由于 C相 绕 组 的 磁力线和 1 、 4号 齿 之 间 磁力 线 的作 用 , 会使转子转动 , 1 、 4 号 齿 和 C相 绕 组 的磁 极 对 齐 。 而 0 、 3号齿 和 A、 B相 绕 组 磁 极 产 生
l 1 0 B Y G 和 国 内标 准 的 7 0 B YG、 9 0 B Y G、 1 3 O B YG等 。
能够通过键盘设置步 进 电机 的转 向和转 速 , 并在 L E D显 示器 上显示步进 电机的转速和工作状态。具体要求 如下 :
( 1 )按 下 不 同 的键 , 分 别 使 步 进 电机 实 现 顺 时针 和 逆 时 针 旋转 。
错齿 , 2 、 5 号齿就和 A、 D相绕组磁极 产生错齿 。依次类 推 , A、 B 、 C、 D 四相绕组 轮流供 电, 则转子会沿着 A、 B、 C、 D方向转动 。
转子 O 、 3号齿 对齐 , 同时 , 转 子的 1 、 4号齿 就和 C、 D相绕组磁
极产生错齿 , 2 、 5 号 齿 就 和 A、 D相绕组磁极产生错齿。
以作 四相运行 , 也可以作两相运行 , 而反应式电机则不能如此 。 感应子式步进 电机 按相数 可分为 两相 电机、 三相 电机 、 四
设计 及程 序设计 。该 系统 可 以实现 步进 电机 正转 、 反转 、 加速 、 减 速 以及 速度 实时 显示 等功 能 , 设计 思路 明确 、 可靠性 高 、 稳 定性 强 。 关键 词 : 步进 电机 ; 单片机; 控 制 系统 ; 设 计
基于单片机的步进电机控制系统

基于单片机的步进电机控制系统摘要:传统步进电机控制系统往往采用硬件电路构成的控制器,电路复杂不易实现。
本文研究了基于单片机的步进电机控制方法,电路简单,实现了软件对电机进行各种操作,既降低了硬件成本又提高了控制的灵活性。
abstract: the traditional stepper motor control system is often used controller with hardware circuit which is not easy to achieve due to complex circuit. this paper studied stepper motor control method based on scm whose circuit is simple. it achieves various operations to motor of software,reduces hardware cost and increases the flexibility of the control.关键词:单片机;步进电机key words: scm;stepper motor中图分类号:tp31 文献标识码:a 文章编号:1006-4311(2013)05-0185-020 引言随着微电子技术和计算机技术的发展,步进电机广泛应用于电动玩具、打印机等消费类产品以及数控车床、医疗器械等机电类产品中,研究步进电机的控制系统,对提高控制的精度和响应速度以及节约成本方面都具有重要意义。
1 步进电机控制系统整体设计步进电机控制系统能够实现对步进电机转速、旋转时间(0s-9999s)的任意设定,并且支持正反转两种旋转方式。
同时具有简单的人机交互界面,是人们更加容易操作。
本系统由硬件系统和软件系统两部分组成。
硬件设计由单片机最小系统、电源模块、键盘控制模块、显示模块组成;软件设计包括键盘控制、步进电机脉冲、显示模块、以及转速计算模块的控制程序,最终实现对步进电机转动方向、转动时间的控制,并将步进电机的的转动速度、转动剩余时间显示在显示模块上面,如图1所示。
基于51单片机的步进电机控制系统设计

基于51单片机的步进电机控制系统设计步进电机是一种特殊的直流电动机,具有定角度、定位置、高精度等特点,在许多领域得到广泛应用,如机械装置、仪器设备、医疗设备等。
本文将基于51单片机设计一个步进电机控制系统,主要包括硬件设计和软件设计两部分。
一、硬件设计步进电机控制系统的硬件设计主要包括51单片机、外部电源、步进电机驱动模块、以及其他辅助电路。
1.51单片机选择由于步进电机控制需要执行复杂的算法和时序控制,所以需要一个性能较高的单片机。
本设计选择51单片机作为主控芯片,因为51单片机具有丰富的外设接口、强大的计算能力和丰富的资源。
2.外部电源步进电机需要较高的电流供给,因此外部电源选择稳定的直流电源,能够提供足够的电流供电。
电源电压和电流的大小需要根据具体的步进电机来确定。
3.步进电机驱动模块步进电机驱动模块是连接步进电机和51单片机的关键部分,它负责将51单片机输出的脉冲信号转化为对步进电机的驱动信号,控制步进电机准确转动。
常用的步进电机驱动芯片有L297、ULN2003等。
4.其他辅助电路为了保证步进电机控制系统的稳定运行,还需要一些辅助电路,如限流电路、电源滤波电路、保护电路等。
这些电路的设计需要根据具体的应用来确定。
二、软件设计1.系统初始化系统初始化主要包括对51单片机进行外部中断、定时器、串口和IO 口等初始化设置。
根据实际需求还可以进行其他模块的初始化设置。
2.步进电机驱动程序步进电机的驱动程序主要通过脉冲信号来控制电机的转动。
脉冲信号的频率和脉冲宽度决定了电机的转速和运行方向。
脉冲信号可以通过定时器产生,也可以通过外部中断产生。
3.运动控制算法步进电机的运动控制可以采用开环控制或闭环控制。
开环控制简单,但无法保证运动的准确性和稳定性;闭环控制通过对电机转动的反馈信号进行处理来调整脉冲信号的生成,从而实现精确的运动控制。
4.其他功能设计根据具体的应用需求,可以加入其他功能设计,如速度控制、位置控制、加速度控制等。
基于单片机的步进电机控制系统设计

基于单片机的步进电机控制系统设计【大比特导读】单片机实现的步进电机控制系统具有成本低、使用灵活的特点,广泛应用于数控机床、机器人,定量进给、工业自动控制以及各种可控的有定位要求的机械工具等应用领域......单片机实现的步进电机控制系统具有成本低、使用灵活的特点,广泛应用于数控机床、机器人,定量进给、工业自动控制以及各种可控的有定位要求的机械工具等应用领域。
步进电机是数字控制电机,将脉冲信号转换成角位移,电机的转速、停止的位置取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,非超载状态下,根据上述线性关系,再加上步进电机只有周期性误差而无累积误差,因此步进电机适用于单片机控制。
步进电机通过输入脉冲信号进行控制,即电机的总转动角度由输入脉冲总数决定,而电机的转速由脉冲信号频率决定。
步进电机的驱动电路是根据单片机产生的控制信号进行工作。
因此,单片机通过向步进电机驱动电路发送控制信号就能实现对步进电机的控制。
1 系统设计原理步进电机控制系统主要由单片机、键盘LED、驱动/放大和PC上位机等4个模块组成,其中PC机模块是软件控制部分,该控制系统可实现的功能:1)通过键盘启动/暂停步进电机、设置步进电机的转速和改变步进电机的转向;2)通过LED管显示步进的转速和转向等工作状态;3)实现三相或四相步进电机的控制:4)通过PC上位机实现对步进电机的控制(启停、转速和转向等)。
为保护单片机控制系统硬件电路,在单片机和步进电机之间增加过流保护电路。
图l为步进电机控制系统框图。
2 系统硬件电路设计2.1 单片机模块单片机模块主要由MSP430FG4618单片机及外围滤波、电源管理和晶振等电路组成。
MSP430FG4618单片机内部的8 KB RAM和116 KB Flash满足控制系统的存储要求,P1和P2端口在步进电机工作过程中根据按键状态判断是否跳入中断服务程序来改变步进电机的工作状态,USART模块实现单片机和PC上位机之间的通信,实现PC机对步进电机控制。
基于单片机的步进电机控制系统设计
基于单片机的步进电机控制系统设计引言:步进电机是一种常用的电机类型,具有精准的位置控制、高效的能量转换等特点。
在许多自动化设备中广泛应用,如数控机床、3D打印机、机器人等。
本文将以基于单片机的步进电机控制系统设计为主题,介绍系统的硬件设计、软件设计以及实验验证。
一、硬件设计1.步进电机选型:根据实际应用需求,选择适当的步进电机。
包括步距角、转速范围、扭矩要求等等。
2.电源设计:步进电机需要驱动电压和电流,根据步进电机的额定电压和电流选用适当的电源。
3.驱动电路设计:步进电机通常需要驱动电路来控制电流和脉冲序列。
常见的驱动电路有全桥驱动器、半桥驱动器等。
4.信号发生器设计:步进电机通过脉冲信号来控制转动角度和速度,因此需要信号发生器来产生合适的脉冲序列。
常见的信号发生器有定时器、计数器等。
5.单片机接口设计:单片机作为步进电机控制系统的核心,需要与其他硬件进行通信。
因此需要设计合适的接口电路,将单片机的输出信号转换为驱动电路和信号发生器所需的电压和电流。
二、软件设计1.单片机程序框架设计:根据具体的单片机型号和开发环境,设计合适的程序框架。
包括初始化设置、主循环、中断处理等。
2.脉冲生成程序设计:根据步进电机的控制方式(如全步进、半步进、微步进等),设计脉冲生成程序。
通过适当的延时和输出信号控制,产生合适的脉冲序列。
3.运动控制程序设计:设计运动控制程序,实现步进电机的前进、后退、加速、减速等功能。
根据具体需求,可以设计不同的运动控制算法,如速度环控制、位置环控制等。
4.保护机制设计:为了保护步进电机和控制系统,设计合适的保护机制。
如过流保护、过压保护、过载保护等。
三、实验验证1.硬件连接:将步进电机、驱动电路和单片机按照设计进行连接。
2.软件调试:通过单片机编程,调试程序代码。
确保脉冲生成、运动控制等功能正常工作。
3.功能测试:对步进电机控制系统进行功能测试,包括正转、反转、加速、减速等功能。
通过观察步进电机的运动状态和测量相关参数来验证系统设计的正确性和性能。
《2024年基于单片机的步进电机控制系统研究》范文
《基于单片机的步进电机控制系统研究》篇一一、引言随着科技的发展,步进电机因其高精度、低噪音、易于控制等优点,在各个领域得到了广泛的应用。
然而,传统的步进电机控制方式存在控制精度低、响应速度慢等问题。
因此,基于单片机的步进电机控制系统应运而生,其具有体积小、控制精度高、响应速度快等优点。
本文旨在研究基于单片机的步进电机控制系统的设计原理、实现方法以及应用前景。
二、步进电机控制系统的基本原理步进电机是一种将电信号转换为机械运动的设备,其运动过程是通过一系列的步进动作实现的。
步进电机的控制原理主要是通过改变电机的电流和电压,使电机按照设定的方向和速度进行旋转。
三、基于单片机的步进电机控制系统设计基于单片机的步进电机控制系统主要由单片机、步进电机驱动器、步进电机等部分组成。
其中,单片机是控制系统的核心,负责接收上位机的指令,并输出相应的控制信号给步进电机驱动器。
步进电机驱动器则负责将单片机的控制信号转换为适合步进电机工作的电流和电压。
在硬件设计方面,我们选择了一款性能稳定、价格适中的单片机作为主控制器,同时设计了相应的电路和接口,以实现与上位机和步进电机驱动器的通信。
在软件设计方面,我们采用了模块化设计思想,将系统分为初始化模块、控制模块、通信模块等部分,以便于后续的维护和升级。
四、基于单片机的步进电机控制系统的实现在实现过程中,我们首先对单片机进行了初始化设置,包括时钟设置、I/O口配置等。
然后,通过编程实现了对步进电机的控制,包括步进电机的启动、停止、正反转以及速度调节等功能。
此外,我们还实现了与上位机的通信功能,以便于实现对步进电机的远程控制和监控。
五、实验结果与分析我们通过实验验证了基于单片机的步进电机控制系统的性能。
实验结果表明,该系统具有较高的控制精度和响应速度,能够实现对步进电机的精确控制。
同时,该系统还具有较好的稳定性和可靠性,能够在各种复杂环境下正常工作。
此外,我们还对系统的抗干扰能力进行了测试,结果表明该系统具有较强的抗干扰能力。
基于单片机控制的步进电机调速系统的设计

基于单片机控制的步进电机调速系统的设计步进电机是一种常用的电机类型,它通常用来实现精确定位和控制运动。
步进电机的控制需要一个精确的调速系统来确保稳定的运行和准确的位置控制。
本文将基于单片机控制的步进电机调速系统进行设计。
首先,我们需要选择合适的硬件以及编程平台。
本设计选择使用Arduino Uno作为单片机控制器,它具有易用性和强大的控制功能。
步进电机选择了NEMA 17型号,它具有较高的分辨率和扭矩输出。
接下来,进行电路设计与连接。
将步进电机的四个线圈连接到单片机的GPIO引脚上,并使用电流驱动模块控制电机的供电。
通过连接外部电源,电流驱动器将为步进电机提供稳定的电流,以确保电机能够正常工作。
在编程方面,首先需要编写初始化代码,配置单片机的GPIO引脚以及串口通信功能。
然后,可以使用Arduino提供的步进电机库来控制电机的旋转。
该库提供了简单的命令来控制步进电机的转动方向和转速。
为了设计调速系统,我们可以使用一个旋转编码器来实时监测电机的转速。
旋转编码器将会测量电机的转动次数,从而计算出电机的转速。
在单片机的程序中,我们可以设置一个目标转速,并根据旋转编码器的数据来调整电机的驱动频率。
为了实现平滑的调速过程,我们可以使用PID控制算法来调整电机的驱动频率。
PID控制算法是一种经典的反馈控制算法,它可以根据目标值和实际值之间的差异来调整控制信号。
通过不断地比较电机的实际速度与目标速度,PID控制算法可以动态地调整电机的驱动频率,以达到稳定的调速效果。
最后,我们可以设计一个用户界面来设置目标速度和监控电机的运行状态。
通过串口通信功能,单片机可以与上位机进行数据交互,用户可以通过上位机发送指令来设置目标速度,并且可以实时监测电机的转速和运行状态。
总结起来,基于单片机控制的步进电机调速系统设计需要进行硬件选择与连接、软件编程以及用户界面设计。
通过合理地选择硬件和软件方案,以及使用PID控制算法,我们可以实现一个稳定且准确的步进电机调速系统。
基于单片机的步进电机控制系统

( ) 永 磁 式 步 进 一 般 为两 相 , HB ,
转 矩 和 体 积 较 小 , 步 进 角 一 般 为 7.5度 或 15度 ; 应 式 步 进 一 般 反
就 驱 动 步 进 电 机 按 设 定 的 方 向 转
动 一 个 固 定 的 角 度 ( 步 进 角 )。 及 通 过 控 制 脉 冲 个 数 即 可 以 控 制 角 位 移 量 , 从 而 达 到 准 确 定 位 的 目 的 ;同 时 通 过 控 制 脉 冲 频 率 来 控
为 三 相 , 可 实 现 大 转 矩 输 出 , 步
进 角 一 般 为 1. 5度 , 但 噪 声 和 振 动 都 很 大 , 在 欧 美 等 发 达 国 家 80
查 该 参 数 可 知 , 其 工 作 电 压 为 12V, 最 大 电 流 为 0. 26A, 因 此 可 用 一 块 开 路 输 出 达 林 顿 驱 动 器 ( ULN2003)来 作 为 驱 动 , 通 过 MCS 一 51单 片 机 的 P1. 一 P1. 4 7 来 控 制 各 线 圈 的 接 通 与 切 断 , 电
统 硬 件 和 软 件 设 计 方 法 。 经 试 验 证 明 . 方 案 达 到 了 对 步 进 电机 的最 佳 控 制 。 该 关 键 词 : 进 电 机 ; 片 机 ; 制 步 单 控
中 国 分 类 号 :P 9 T3 3
●
文 献 标 识 码 : A
文 章 编 号 :0 3 0 0 (0 7 1 - 0 2 0 10- 1 72 0)2 01- 3
磁 式 ( PM), 反 应 式 ( VR)和 混 合 式
引 出 线 。要 使 用 步 进 电机 转 动 , 只 要 轮 流 给 各 引 出端 通 电 即可 。 将 COM端 标 识 为 C, 只 要 A C、 AC、 BC、 BC, 轮 流 加 电 就 能 驱 动 步 进 电 机 运 转 , 加 电 的 方 式 可 以 有 多 种 ,如果 4  ̄COM端 接 正 电 源 , 那 么 只 要 用 开 关 元 件 ( 三 极 管 ), 将 如
基于单片机步进电机的控制系统设计

1 硬 件设 计 本 文介绍 的设计 方案 是基 于单片 机 的 步进 电机运 行控 制系统 。在这个 控制 系统 中, 控 制器是 它的核心 , 因为它 担负着 产生 脉 冲, 发送 、 接受控制命令等任务 。 整个系统 的控制核心是 A T 8 9 C 5 1 。其成本相对较低 , 运行可靠性较高 。 系统 的组成方框图如图 1 所示。 本系统 由单 片机 ( Mc u) 、 电机驱 动 电路 、 L E D显 示 ( 指示 ) 、 按键 电路和看 门狗电路等组成。单 片机 A T 8 9 C 5 1 控 制步 进 电机脉 冲信 号 , 通 图 1 系统 框 图 过外接 键盘作 为输人 控制 步进 电机 的正 反 转、 停止 、 加减速工作状 态 , 并通过 显示 器进 行工作状态信 号输 出。在这个控制系统 中, 单片机 是核心 , 它 通过键 盘接受 指令 、 通 过 运算控制单片机运行 、 并通过显示器进行信 号输出。 2 系统软件设计 当在待机状态下设定好所需 的参数后 , 按 下“ 启停 ” 键, 系统便开始根据设定 的参数 和运行模 式进行 步进 电机控 制脉 冲输 出运 行。 程序 中按照设定参数顺序输出控制 脉冲 是受定 时器中断控 制。( 见图 2 ) 3技术经济分析 对 于 电动机来讲 ,要 求不 断 的减 少硬 件, 降低成本 , 并不 断提 高起 原先 的稳定性 、 可靠性 , 对技术 的要求越来越高 。设计工作 是工 程建设的关键环节 , 做好设计工作对工 程建 设 的工期 、 质量 、 费用 和应 用 于实际后 的运行 安全性和 的经济效益 , 起着决定性作 用 。因此 ,设计时一定要力求技 术成 熟 、 可 靠, 并尽可能 的节约资金 。本设计采用步进 电动机作 为控制对象 , 因为步进 电动机作为 数字控制 系统 的一种元件 , 其功用是将脉 冲 电信号变换为 角位移或直线位移 。 它能按照 图 2 步 进 电机 运 行 模 块 主 流 程 控制 脉 冲的要求 , 能迅 速启动 、 正转 、 反转 、 加速 、 减速 、 制动 ; 工 作时能够 不失 步 , 步距 精度 高 , 鉴 于这 些特点 , 步进 电机在 自动控 [ 1 ] 王晓明 , 胡 晓柏 . 电动机 的单 片机 控制[ M] . 北京 : 北京航 空航 天 大 制系统 中 , 特别是开环的数字程序控制 中作为传动元件而得 到广泛 学 出版社, 2 0 0 2 . 5 , 1 : 1 8 1 — 2 0 8 . 应用 。 【 2 】 史敬灼. 步进 电动机 伺服控制技 术【 M 】 . 2 0 0 7 , 3 , 2 : 2 3 — 3 5 . 本系统选 A T 8 9 C 5 1 , 成本较低 。 且A T 8 9 C 5 1内有 4 K的 R O M存
基于51单片机的步进电机控制系统设计与实现
基于51单片机的步进电机控制系统设计与实现步进电机控制系统是基于51单片机的一种控制系统,它主要用来控制步进电机的转动方向和转速等参数。
下面详细解释一下这个系统的设计和实现。
1. 系统硬件设计步进电机控制系统的硬件主要包括51单片机、驱动电路、步进电机和电源等部分。
其中,驱动电路是控制步进电机的关键,它通常采用L298N芯片或ULN2003芯片等常用的驱动模块。
在硬件设计方面,主要需要考虑以下几个方面:(1)步进电机的种类和规格,以便选择合适的驱动电路和电源。
(2)驱动电路的接线和参数设置,例如步进电机的相序、脉冲频率和电流大小等。
(3)电源的选取和参数设置,以满足系统的供电要求和安全性要求。
2. 系统软件设计步进电机控制系统的软件设计主要包括编写控制程序和调试程序。
其中,控制程序是用来实现步进电机的正转、反转、加速和减速等控制功能,而调试程序则用来检测系统的电路和程序的正确性和稳定性。
在软件设计方面,主要需要考虑以下几个方面:(1)确定控制程序的算法和流程,例如使用“循环控制法”或“PID控制法”等控制方法。
(2)选择编程语言和编译器,例如使用汇编语言或C语言等。
(3)编写具体的控制程序和调试程序,并进行测试和调试,以确保程序的正确性和稳定性。
3.系统实现步进电机控制系统的实现主要包括硬件组装和软件烧录两个部分。
在硬件组装方面,需要按照硬件设计图纸进行零部件的选取和电路的组装,同时进行电源和信号线的接入。
在软件烧录方面,需要使用专用的编程器将程序烧录到51单片机的芯片中,并进行相应的设置和校验。
总之,基于51单片机的步进电机控制系统是一个功能强大、应用广泛的控制系统,可以实现精密控制和自动化控制等多种应用,具有很高的实用价值和研究价值。
基于单片机的步进电机细分控制系统
K EYW O RDS s e t ppig ot r, s n m o ubd vson d i ontol M CU i ii rve c r ,
h g c u a y s di son o t p pic ng e oft t pp n m ot r By a l i g t ub vson d ii g i cpl ft e sep ng i h a c r c ub vii fs e t h a l he s e i g o. nayzn he s di ii rv n prn i e o h t pi
b e dn tp moo r ig c i L 9 / 9 ,t e d iig c n r l y tm fse t ro wi h mo e a d c n tn u r n a ln igse t rd i n h p 2 7 2 8 h r n o to s se o tp moo fs t — d n o sa tc re tw s v v c
中图 分 类 号 :TP 3 2 文 献 标 识 码 :A
AB T S RAC S e p n t rs b i ii n t c n l g i l s d t n r a et e o e a i n l c u a y o h t ra d t c iv T t p i g mo o u d v so e h o o y i man y u e o ic e s h p r t a c r c f e mo o n O a h e e s o a t
基于单片机的步进电机控制系统研究

基于单片机的步进电机控制系统研究一、本文概述随着现代工业技术的快速发展,步进电机作为一种重要的执行元件,在精密控制、自动化设备、机器人技术等领域得到了广泛应用。
步进电机控制系统是实现其精确、高效运行的关键,而单片机作为一种集成度高、功能强大、成本较低的微控制器,在步进电机控制系统中发挥着重要作用。
本文旨在研究基于单片机的步进电机控制系统,分析其设计原理、实现方法以及性能优化,为步进电机控制系统的实际应用提供理论支持和技术指导。
本文首先介绍了步进电机的工作原理和特性,以及单片机在步进电机控制中的应用优势。
接着,详细阐述了基于单片机的步进电机控制系统的总体设计方案,包括硬件电路设计和软件编程实现。
在硬件电路设计方面,重点介绍了单片机选型、驱动电路设计、电源电路设计以及接口电路设计等内容;在软件编程实现方面,主要讨论了步进电机的控制算法、运动轨迹规划以及通信协议设计等关键技术。
本文还对基于单片机的步进电机控制系统的性能进行了深入分析和优化。
通过实验研究,对比了不同控制算法对步进电机运动性能的影响,探讨了提高系统精度和稳定性的有效方法。
针对实际应用中可能出现的干扰和故障,提出了相应的抗干扰措施和故障诊断方法。
本文总结了基于单片机的步进电机控制系统的研究成果,并展望了未来的发展方向。
通过本文的研究,不仅有助于加深对步进电机控制系统原理和实现方法的理解,也为步进电机控制系统的优化设计和实际应用提供了有益的参考和借鉴。
二、步进电机及其控制原理步进电机是一种特殊的电机类型,其设计允许它在离散的角度位置上精确地旋转。
与传统的交流或直流电机不同,步进电机不需要复杂的控制系统来实现精确的位置控制。
它通过一系列离散的步进动作,即“步进”,从一个位置移动到另一个位置。
每个步进的角度通常是固定的,这取决于电机的设计和构造。
步进电机通常由一组电磁线圈构成,每组线圈都与电机的一个或多个极相对应。
当电流通过线圈时,它会产生一个磁场,这个磁场与电机内的永磁体相互作用,导致电机轴的旋转。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数理与信息工程学院《单片机原理及应用》期末学期课程设计题目:基于单片机的步进电机控制系统专业:电子信息工程班级:电信041班姓名:林浩波学号:04610117指导老师:余水宝成绩:12 自己的东西偏少,格式欠规范化(2007.1)目录第1章引言 (3)1.1 步进电机控制系统概述 (3)1.2 本设计任务和主要内容 (4)第2章系统主要硬件电路设计 (5)2.1 单片机控制系统原理 (5)2.2 单片机主机系统电路 (5)2.2.1时钟电路 (6)2.2.2复位电路 (6)2.3 步进电机驱动电路 (7)2.4 LED显示电路 (8)第3章系统的软件设计 (10)3.1 步进电机的位置控制 (10)3.2 显示子程序 (13)第四章结束语 (17)第5章参考文献 (18)基于单片机的步进电机控制系统数理与信息工程学院电信041 林浩波指导教师:余水宝第1章引言在当今社会的各个领域步进电机无处不在,应用领域涉及机器人、工业电子自动化设备、医疗器件、广告器材、舞台灯光设备、印刷设备、计算机外部应用设备等等。
因此,设计出高精确度、实时监控、语音提示的步进电机具有重要的现实意义和实用价值。
本设计是基于80C51单片机的步进电机控制系统,能够有效地对步进电机转速、方向的控制。
为了能够更加人性化的控制系统,本设计还增加了语音提示部分,在实际应用当中由于紧急事件需要在短时间内了解电机的工作情况,这时看数码显示就很不方便,而语音提示提供很大帮助,只要按下语音提示按钮便能获取相关技术数据。
本设计采用16 位单片机MCS80C51对步进电机进行控制,通过I/O口输出的具有时序的方波作为步进电机的控制信号,信号经过驱动芯片驱动步进电机;同时,用4X4的键盘来对电机的状态进行控制,并用数码管显示电机的转速,采用74LS164作为4位单个数码管的显示驱动。
1.1 步进电机控制系统概述步进电机是机电一体化产品中的关键组件之一,是一种性能良好的数字执行元件,随着计算机应用技术、电子技术和自动控制技术在国民经济各个领域中的普及与深入,步进电机的需求量越练越大。
随着工业技术的不断发展,以及同类产品的不断出现,步进电机面临着前所未有的挑战。
但近30年来,数字技术、计算机技术和永磁材料的迅速发展,推动步进电机的发展,为步进电机的应用开辟了广阔的前景,近几年来,步进电机需求量一直呈现出较快的增长速度,其中扫描仪、打印机、传真、DVD-ROM/CD-ROM驱动器、空调及多功能自动化办公设备等应用对步进电机的需求增长最强。
此外由于USB2.0的日益流行促进了高分辨率扫描仪的销售,步进电机向着小型、薄型和更小的步进角度发展。
步进电机有着方方面面重要应用,如何对其进行有效控制,使其能够发挥最大的优势是各个行业技术开发人员所共同关注的,本文旨在设计一套较完整的通用控制系统,对步进电机的转速、方向实行智能化控制,并能通过LED显示其转速。
1.2 本设计任务和主要内容本论文主要研究单片机控制的步进电机系统,对步进电机的转速、方向进行控制和显示。
主要内容如下:②通过键盘设定步进电机的转速及方向②LED显示步进电机的转速第2章系统主要硬件电路设计2.1 单片机控制系统原理图2-1 单片机控制系统原理框图2.2 单片机主机系统电路AT89C51是一种带4K字节闪烁可编程可擦除只读存储器(FPEROM—Falsh Programmable and Erasable Read Only Memory)的低电压,高性能CMOS8位微处理器。
AT89C2051是一种带2K字节闪烁可编程可擦除只读存储器的单片机。
单片机的可擦除只读存储器可以反复擦除100次。
该器件采用ATMEL高密度非易失存储器制造技术制造,与工业标准的MCS-51指令集和输出管脚相兼容。
由于将多功能8位CPU和闪烁存储器组合在单个芯片中,ATMEL的AT89C51是一种高效微控制器,AT89C2051是它的一种精简版本。
AT89C单片机为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。
图2-2 单片机主机系统图2.2.1时钟电路单片机的时钟信号用来提供单片机片内各种微操作的时间基准,时钟信号通常用两种电路形式得到:内部振荡和外部振荡。
MCS-51单片机内部有一个用于构成振荡器的高增益反向放大器,引脚XTALl和XTAL2分别是此放大电器的输入端和输出端,由于采用内部方式时,电路简单,所得的时钟信号比较稳定,实际使用中常采用这种方式,如图2-2所示在其外接晶体振荡器(简称晶振)或陶瓷谐振器就构成了内部振荡方式,片内高增益反向放大器与作为反馈元件的片外石英晶体或陶瓷谐振器一起可构成一个自激振荡器并产生振荡时钟脉冲。
图2-2中外接晶体以及电容C2和C1构成并联谐振电路,它们起稳定振荡频率、快速起振的作用,其值均为30P左右,晶振频率选12MHz2.2.2复位电路为了初始化单片机内部的某些特殊功能寄存器,必须采用复位的方式,复位后可使CPU及系统各部件处于确定的初始状态,并从初始状态开始正常工作。
单片机的复位是靠外电路来实现的,在正常运行情况下,只要RST引脚上出现两个机器周期时间以上的高电平,即可引起系统复位,但如果RST引脚上持续为高电平,单片机就处于循环复位状态。
复位后系统将输入/输出(1/0)端口寄存器置为FFH,堆栈指针SP置为07H, SBUF内置为不定值,其余的寄存器全部清0,内部RAM的状态不受复位的影响,在系统上电时RAM的内容是不定的。
复位操作有两种情况,即上电复位和手动(开关)复位。
本系统采用上电复位方式。
图2-2中R9和Cl组成上电复位电路,其值R取为1K, C取为1pF.2.3 步进电机驱动电路驱动电路集成化成为一种趋势。
目前,已有多种步进电机驱动集成电路芯片,它们大多集驱动和保护于一体,作为小功率步进电机的专用驱动芯片,广泛用于小型仪表、计算机外设等领域,使用起来非常方便。
本设计采用UCN5804B芯片。
UCN5804B芯片适用于四相步进电机的单极性驱动。
它最大能输出1.5A电流、3.5V电压。
内部集成有驱动电路,上电自行复位,可以控制转向和输出使能。
图2-3 步进电机驱动电路图2-3为步进电机驱动电路,其中4、5、12、13脚为接地引脚,1、3、6、8脚为输出引脚,电动机各相的的接线如图,14脚是控制电机的转向,其中低电平为正转,高电平为反转;11脚是步进脉冲的输入端,9、10脚决定工作方式,其真值表如表2-1所示:表2-1 9、10脚真值表2.4 LED显示电路由于系统显示的内容比较简单,显示量不多,所以显示选用数码管既方便又经济。
LED有共阴极和共阳极两种。
如图2-4所示。
符号和引脚共阴极共阳极图2-4 LED数码管结构原理图二极管的阴极连接在一起,通常此共阴极接地,而共阳极则将二极管的阳极连接在一起,接入+5V的电压。
一位显示器由8个发光二极管组成,其中7个发光二极管。
当在某段发光二极管施加一定的正向电压时,该段笔画即亮;不加电压即暗。
为了保护各段LED不被损坏,需外加限流电阻。
数码管显示器有两种工作方式,即静态显示方式和动态扫描显示方式。
为节省端口及降低功耗,本系统采用动态扫描显示方式。
本电路的“段控”和“位控”分别由P1口和P3口控制,P3选中哪个数码管,哪个数码管就亮,P1口控制显示数字。
因AT89C51单片机I/O口资源有限,必须对其Il0口进行扩展才能满足实现系统功能,如图2-7所示为用8155扩展1/0口的4个8位LED动态显示器,显示扫描由程控实现,其中PA口输出字型码,PC口输出位选信号即扫描信号,图中片选线CE和AT89C51的P2.7口相连,IO/ M选通输入线与P2.4口相连,该系统中当P2.7=0且P2.4 =1时,选中8155芯片内三个I/O 口。
相应的端口地址分配如表2-1:表2-2 8155端口地址分配图 2-5 显示电路第3章系统的软件设计3.1 步进电机的位置控制步进电机的运行控制涉及到位置控制和加、减速控制。
步进电机的位置控制,指的是控制步进电机执行机构从一个位置精确地运行到另一个位置。
步进电机的位置控制是步进电机的一大特点,它可以不用借助位置传感器而只需要的开环控制就能达到足够的位置精度。
步进电机的位置控制需要两个参数。
第一个是绝对位置,即步进电机控制的执行机构当前的位置参数,绝对位置是有极限的,其极限是执行机构运动的范围,超越了这个极限就应报警。
第二个是从当前位置移动到目标位置的距离,我们可以用折算的方式将这个距离折算成步进电机的步数。
这个参数是外界通过键盘或可调电位器旋钮输入的,所以折算的工作应该在键盘程序或A/D转换程序中完成。
下面是本程序使用的资源:30H、31H------存放定时器的常熟,低位在前32H~34H--------存放绝对位置参数,低位在前35H、36H-------存放步进数,低位在前中断服务子程序框图如图2-6所示。
图2-6 步进电机位置控制子程序框图程序如下:POS: CPL P1.0 ;改变P1.0电平状态PUSH ACC ;累加器A进栈PUSH PSWPUSH R0 ;R0进栈JNB P1.0,POS4 ;P1.0=0时,半个脉冲,转到POS4 CLR EA ;关中断JNB P1.1,POS1 ;反转,转到POS1MOV R0,32H ;正转INC @R0CJNE @R0,#00H,POSE ;无进位则转向POS2INC R0INC @R0CJNE @R0,#00H,POS2INC R0INC @R0CJNE @R0,#00H,POS2 ;无越界,则转POS2CLR TR0 ;发生越界,停定时器(停电动机)LCALL BAOJING ;调报警子POS1: MOV R0,#32H ;反转DEC @R0CJNE @R0,#0FFH,POS2 ;无借位则转向POS2INC R0DEC R0CJNE @R0,#0FFH,POS2INC R0DEC @R0CJNE @R0,0FFH,POS2CLR TR0LCALL BAOJINGPOS2: MOV R0,#35H ;指向步数低位35HDEC @R0CJNE @R0,#0FFH,POS3IU9INC R0DEC @R0POS3: SETB EAMOV A,35HORL CJNZ POS4CLR TR0SJMP POS5POS4: CLR CCLR TR0MOV A,TL0ADD A,#08HADD A,,30HMOV TL0,AMOV A,TH0ADDC A,31HMOV TH0,ASETB TR0POS5: POP R0POP PSWPOP ACCRETI3.2 显示子程序硬件电路如图2-4所示,通过8155芯片来扩展I/O口,其端口地址分别是:命令/状态寄存器:7FF8H ,PA口:7FF9H,PB口:7FFAH,PC口:7FFBH。