海洋环境与钻采工程 第九章 移动式钻井平台的锚泊定位系统
海上钻井平台各系统简介
钻井平台各系统简介不知道从什么时候起,石油的价格节节攀升。
能源越来越紧张的今天,很多国家把目光从陆地转向了海洋。
自从世界上第一个海洋钻井平台制造出来以后,海洋工程有了长足的发展。
在几十米甚至上3~4000米深的海底钻一口井并不是一件容易的事,因为在海上环境的复杂多变以及恶劣。
经常要承受巨浪和暴风的袭击。
而钻井又要保持一个相对稳定的作业环境。
才能把一根根长长的钻杆钻进海底。
钻井平台从近海到深海,主要可以分为座底式,自升式,半潜式、钻井船等。
座底式是指,平台的结构直接座在海床上,几乎和陆上钻井没多大区别。
所以它们的可钻探深度很有限。
只能在几十米的水深的浅海区域作业。
自升式,又叫jack-up。
顾名思义,这种平台可以象千斤顶一样可以升降它的高度。
它典型的特征就式3-4条腿。
高高的绗架结构。
上面安装又齿条。
平台本体安装有齿轮。
它们一起啮合,传动。
在到达钻井区域的时候,腿就慢慢的伸到海床上。
平台就靠这几条腿站在海里了。
因为考虑到拖航的稳性,腿不能太长。
所以这种平台一般在120~150米水深的近海区作业。
半潜式,最新的已经到了第6代了。
这种平台综合了钻井船和坐底式驳船的优点,是漂浮在海面上的。
这样的话,它们就可以在更深的水域工作了;船体灌放水,可以调节吃水深度,保持船体稳定。
塔的下部是相当容积的浮筒,上面是若干个中空的立柱,支撑着上部平台平台上面是全部的钻井装备和必要的生活设施。
整个平台靠浮筒浮在水面。
它们带有2~3级动态定位系统,海底声纳定位系统,卫星定位系统等来保证平台的相对稳定的坐标。
它们有各种位移补偿装置来补偿海况带来的不稳定状况。
钻井船,钻井船是设有钻井设备,能在水面上钻井和移位的船,也属于移动式(船式)钻井装置。
较早的钻井船是用驳船、矿砂船、油船、供应船等改装的,现在已有专为钻井设计的专用船。
目前,已有半潜、坐底、自升、双体、多体等类型。
钻井船在钻井装置中机动性最好,但钻井性能却比较差。
钻井船与半潜式钻井平台一样,钻井时浮在水面。
海上移动式钻井平台构造和设备规则(MODU CODE)

海上移动式钻井平台构造和设备规则(MODU CODE)3.6.1 目的《2009 年海上移动式钻井平台构造和设备规则》(以下简称“本规则”)旨在为海上移动式钻井平台的设计衡准、建造标准及其他安全措施提出建议,以最大限度地降低对这种平台、平台上人员和环境的风险。
3.6.2 适用范围1.2.1 本规则适用于2012 年1 月1 日或以后安放龙骨或处于类似建造阶段的第1.3节中所定义的海上移动式钻井平台。
1.2.2 对本规则未涉及的生产系统的操作方面,沿岸国可提出附加要求。
3.6.3 定义1.3 定义就本规则而言,除非另有明文规定者外,其中所用术语的定义如下:1.3.1 1988 年载重线议定书系指经修订的《〈1966 年国际载重线公约〉的1988 年议定书》。
1.3.2 “A”级分隔与《安全公约》第II-2/3 条中的定义相同。
1.3.3 起居处所系指用作公共处所、走廊、盥洗室、居住舱室、办公室、医务室、影院、游戏及娱乐室、无烹调设备的配膳室的处所以及类似处所。
公共处所系指起居处所中用作大厅、餐厅、休息室的部分以及类似的永久性围蔽处所。
1.3.4 主管机关系指平台有权悬挂其旗帜的国家政府。
1.3.5 周年日期系指与有关证书期满之日对应的每年的该月该日。
1.3.6 辅助操舵装置系指在主操舵装置失效时使舵运动以便操纵平台的设备。
1.3.7 “B”级分隔与《安全公约》第II-2/3 条中的定义相同。
1.3.8 “C”级分隔与《安全公约》第II-2/3 条中的定义相同。
1.3.9 证书系指《海上移动式钻井平台安全证书》。
1.3.10 沿岸国系指对平台的钻井作业行使行政控制的国家政府。
1.3.11 柱稳式平台系指用立柱或浮筒将主甲板与水下船体或基础相连接的平台。
1.3.12 连续“B”级天花板或衬板系指仅终止于“A”级或“B”级分隔处的“B”级天花板或衬板。
1.3.13 控制站系指平台无线电设备、主要航行设备或应急电源所在的处所,或者是火警指示器或失火控制设备或动力定位控制系统集中的处所,或服务于各部位的灭火系统所在的处所。
海上移动式钻井平台构造和设备规则(MODU CODE)
海上移动式钻井平台构造和设备规则(M O D UC OD E)-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN海上移动式钻井平台构造和设备规则(MODU CODE)目的《2009 年海上移动式钻井平台构造和设备规则》(以下简称“本规则”)旨在为海上移动式钻井平台的设计衡准、建造标准及其他安全措施提出建议,以最大限度地降低对这种平台、平台上人员和环境的风险。
适用范围本规则适用于2012 年1 月1 日或以后安放龙骨或处于类似建造阶段的第节中所定义的海上移动式钻井平台。
对本规则未涉及的生产系统的操作方面,沿岸国可提出附加要求。
定义定义就本规则而言,除非另有明文规定者外,其中所用术语的定义如下:1988 年载重线议定书系指经修订的《〈1966 年国际载重线公约〉的1988 年议定书》。
“A”级分隔与《安全公约》第II-2/3 条中的定义相同。
起居处所系指用作公共处所、走廊、盥洗室、居住舱室、办公室、医务室、影院、游戏及娱乐室、无烹调设备的配膳室的处所以及类似处所。
公共处所系指起居处所中用作大厅、餐厅、休息室的部分以及类似的永久性围蔽处所。
主管机关系指平台有权悬挂其旗帜的国家政府。
周年日期系指与有关证书期满之日对应的每年的该月该日。
辅助操舵装置系指在主操舵装置失效时使舵运动以便操纵平台的设备。
“B”级分隔与《安全公约》第II-2/3 条中的定义相同。
“C”级分隔与《安全公约》第II-2/3 条中的定义相同。
证书系指《海上移动式钻井平台安全证书》。
沿岸国系指对平台的钻井作业行使行政控制的国家政府。
柱稳式平台系指用立柱或浮筒将主甲板与水下船体或基础相连接的平台。
连续“B”级天花板或衬板系指仅终止于“A”级或“B”级分隔处的“B”级天花板或衬板。
控制站系指平台无线电设备、主要航行设备或应急电源所在的处所,或者是火警指示器或失火控制设备或动力定位控制系统集中的处所,或服务于各部位的灭火系统所在的处所。
锚泊定位

锚泊定位
用锚及锚链、锚缆将船或浮式结构物系留于海上,限制外力引起的漂移,使其保持在预定位置上的定位方式。
英文:anchor mooring positioning 。
锚泊定位常用于钻井船或半潜式钻井平台上。
目的在于限制和减小它们在风、浪、流作用下的运动,以减少由于过度运动所造成的停钻时间。
风、浪、流可能来自不同方向,一般采用呈辐射状的多点锚泊系统。
为最大限度地减小运动,在强度许可条件下将每根索链尽量收紧。
一般多用链,因链较重,吸收动载荷的能力较强。
锚泊定位水深通常可达200~300米,更大的水深则可用索或上段为索、下段为链的索链组合系统,其水深可达800~900米。
但深水中亦有采用动力定位者,或锚泊定位与动力定位并用,浅水时用锚泊定位,深水时用动力定位,或以锚泊定位为主,大风浪时使用动力定位协助。
海洋环境与钻采工程 第九章 移动式钻井平台的锚泊定位系统

第九章移动式钻井平台的锚泊定位系统第一节锚泊定位概述1、锚泊定位系统它是在海底设置固定的基底设备,用锚泊线将水面系留物(平台)与基底设备联系起来,从而限制系留物(平台)的漂移2、锚系的组成它是由锚(基底设备)、锚链(锚缆)、锚机、锚架、锚浮标等组成。
锚系的分类移动性锚系暂时性锚系永久性锚系3、平台对锚系的要求(1)自升式平台要满足升船前的锚泊定位要求要满足锚泊定位后的移船就位要求要满足拖航过程中对锚泊的要求(2)半潜式平台定位要求最大漂移半径〈5~6%水深常为漂移半径〈2~3%水深拖航与就位的要求控制平台的漂移确保平台的生存拖航时,与自升平台相同移船就位的要求(3)浮式平台的锚泊要求最短出链长度要求:该长度应该大于锚链承受极限张力(1/2锚链破断张力)时的悬链长度,以保证锚前面始终有一段锚链水平躺在海床上,使锚总是承受水平拉力。
锚链张力(锚抓力)试验:即预计的最大锚链张力试验,一般不超过锚链破断张力的1/3。
如张力试验达不到要求,要调大锚爪角,或增加串联锚等。
锚链预张力:根据当平台位移达到5%水深时,锚链张力达到其1/3破断张力来确定4、锚泊系统的布锚方式临时锚泊 定位锚泊第二节 锚泊系统的静力分析一、悬链线它是一种具有均质、完全柔性而无延伸的链或索自由悬挂于两点上所形成的曲线 悬链线方程0cos )cos()(=-++θθθT d dT T (1) 0sin )sin()(=--++wdl T d dT T θθθ (2) θd 很小时,1cos ≈θd ,θθd d =sin忽略θdTd ,则0cos sin =-dT d T θθθ (3) 0sin cos =-+wdl dT d T θθθ (4) 由(4)得:)cos (sin 1θθθd T wdl dT -=,代入(3)得:θθθθθθθθθθθsin cos sin cos )cos (sin cos sin 2d T wdl d T wdl d T -=-=∴ wdl wdl wdl Td θθθθθθθθθθcos )cos (sincos )sin cos (sin sin cos 222=+=+=(5)由(3)得:θθθd dTT sin cos = 代入(4)得0sin sin cos 2=-+wdl dT dT θθθ∴ dl w wdl dT θθθθsin )sin sin cos (2=+= (6)又∵dl dx θcos = (7) dl dy θsin = (8)b b a a o T T T θθcos cos == (9)即悬链线的水平张力相等,由⑹和⑻式,得wdy dT =在a,b 段上积分:⎰⎰=b aT Tywdy dT 0 wy T T a b +=∴ (10)由(5)式得:θθcos w Td dl =,代入(8)式得: θθθcos sin w Td dy =由于θcos o T T =,代入上式得:θθθd w T dy o 2cos sin =积分:θθθθθd w T dy ba o y⎰=⎰20cos sin )11()cos 1cos 1(22+-+=-=∴a b o abo tg tg wT wT y θθθθ (11)同理由⑸和⑺式得 θθd w T dx ocos 1=θθθθd w T dxb a oy⎰=⎰cos 10 )]]()([)1ln()1[ln(1122a b o a a b b o tg shtg shwT tg tg tg tg wT x θθθθθθ---=++-++= (12)由(5)式得:θθd w T dl o2cos 1=θθθθd w T dl b ao l ⎰=⎰20cos 1)(a b o tg tg wT l θθ-=(13)注意:a 点并未与海底相切((9)—(13)是锚链线静力分析的基本公式二、锚泊线静力分析1、 单一成分锚泊线以0=a θ,0T T a =,并将b θθ→,b T T →,y h →,x s →代入⒀ ⑽ ⑿ ⑾ 则可得如下的公式:o T wl tg =θ (14)22)(o o T wl wh T T +=+= (15))()(11θtg shwT T wl shw T s o o o --==(16)]1)([]11[]11)([22-=-+=-+=o o o o o T ws ch wT tg wT T wl wT h θ (17)以上公式共有七个变量:θ、w 、l 、T 0、T 、h 和s如果已知h 、w 和锚泊线上端所受的水平力Q (Q =T 0)便可由上述公式求出l 、T 、θ、s 若已知h 、l 、w 则可求出最大外力Q m 及θ、T 、s若实际所受外力Q<Q m ,则锚泊线未全部提起,则可根据 h 、w 、Q 计算出实际提起的悬垂长度l 及其它参数若Q>Q m ,则锚泊线全部提起且下端倾角必大于零这时应根据公式⑼至⒀计算各相关参数 2、二成分锚泊线注意各符号的意义 o T Q → 便得:Q l w l w tg )(22111+=θ (18) Q l w tg 222=θ (19)2222112211)(Ql w l w l w l w Q T ++=++= (20))]()([211111θθtg sh tg shw Q s ---=(21))(2122θtg shw Q s -=(22)21s s s += (23)]11[221211+-+=θθtg tg w Q h (24))11(2212-+=θtg w Q h (25)21h h h += (26)上面九个公式中共有十四个变量:若已知w 1、l 1、w 2、l 2、h 便可计算出保悬链线下端张力水平时,其上端所能承受的最大水平外力Q m 及其他参数(采用迭代法,先假设一个Q 值) 迭代法先假设一个Q 值,代入(18)、(19)式可算θ1、θ2。
海洋浮式钻井平台预抛锚技术

56传统海洋浮式钻井平台的锚泊定位是平台被拖航到井位,由起抛锚船协助完成抛锚作业后,钻井平台才能投入钻前准备作业,通常500m以内的浅水海域抛锚作业需要1~2天,500m以上的深水海域抛锚作业需要2~4天;钻井作业完成,由起抛锚船协助完成起锚作业后,钻进平台才能被拖航前往下个井位,起锚所需时间与抛锚用时接近。
深水动力定位平台则因具备自航性和无需起抛锚,作业效率更高,钻井周期更短,在成本高昂的深水海域钻井更受欢迎,但动力定位平台日耗燃油(约30~60m³)远高于传统锚泊定位平台日耗燃油(约10~15m³),导致作业燃油成本较高。
预抛锚技术的出现,整合了两种浮式钻井平台定位方式的优点,规避了两种定位方式的主要缺点。
一、预抛锚技术预抛锚技术主要是指在钻井平台到达井位前,整套锚及锚链(8条或12条)已由抛锚船提前完成抛锚和张力测试,平台到达井位后只需将已抛好的锚链与平台锚泊系统连接并拉到工作张力即可投入钻前准备作业,锚泊系统连接后钻井作业期间平台将采用锚泊定位;钻井作业完成后,只需解脱锚链与平台锚泊系统的连接,平台即可前往下个井位,该技术不仅大幅缩短了起、抛锚所需时间,也大幅减少了动力定位平台的燃油消耗,对常规锚泊定位平台和深水动力定位平台均可适用。
二、预抛锚作业主要流程预抛锚作业流程可分为两个阶段:一是作业准备阶段,包括锚泊分析、锚泊设计、导航定位设备安装、工作船装载锚泊设备等;二是作业实施阶段,包括锚系布设、锚系连接、锚系解脱、锚系回收。
1.作业准备(1)锚泊分析和设计。
根据作业目标井位处的井场调查海底地貌、土壤强度及水深、水文气象等数据进行锚泊分析,并结合平台锚泊系统性能特点和油田区水上水下设施布置情况,拟定布锚设计方案,列出预抛锚作业的出链长度、锚系结构及所需锚泊属具等。
如针对海洋石油982平台锚机滚筒特点和拟作业的水深,结合平台100m、200m锚泊分析报告,及工作船作业等诸多因素,设计150m水深预抛锚作业锚系结构简介为:15吨(MK6/MK5)大抓力锚头500M(R5)锚链+200M(84mm)锚缆+750米钢缆(90mm)+200m(56mm)浮筒钢丝的连接设计。
概述海上钻井平台的动力定位系统

概述海上钻井平台的动力定位系统动力定位(Dynamic Positioning)系统已经广泛应用于海洋作业船、海洋科考船、深海半潜式钻井平台以及为钻井平台服务的穿梭油轮、储油加工等船舶,目前建造的海洋工程船如风车安装船、穿梭油轮、MPF1000FDPSO和半潜式钻井平台如Sevan650、GM4000等都装备了动力定位系统,这些船根据用途装备的动力定位设备等级不同,因此设备的配置和入级标志也不同,下面作个简单的介绍。
1 动力定位功能及系统组成1.1 动力定位功能动力定位(以下简称DP)是完全依靠推进力方式而不是锚泊方式保持船位(固定位置或预定航线)。
其基本工作原理是利用计算机对接收的卫星定位信号(DGPS)、环境参数(风、浪、流)以及船舶传感器输入的船舶位置信号,自动地与计算机中模拟的预定船位进行比较,推算出保持这一位置需要的各推进器的推力、速度和方向,自动控制推进器工作。
反复地进行比较判断计算和执行控制,使船舶在规定的环境条件下,位置保持在精度允许的范围内。
1.2 DP系统组成DP主要有3大系统组成:电力系统;控制系统;推进系统。
1.2.1 DP电力系统:发电机组;配电系统;功率管理系统。
1.2.2 DP控制系统:计算机及自动控制系统;独立操纵杆系统(手动控制);传感器系统[电罗经、移动参照传感器(MRU)、风向风速传感器];位置参照系统[卫星参照系统GPS、激光参照系统(Laser)、雷达参照系统、无线电参照系统、水声参照系统、张紧索参照系统(Tautwire)]。
2 DP设备等级国际海事组织(IMO)通过的《海上移动式钻井平台构造和设备规则1989修正案》中详细地规定了DP设备等级,其文Msc./Cire.645《采用动力定位系统船舶导则》中规定了DP系统的设备等级分别为3级,即:Class1、Class2、Class3(为叙述方便,本文用DP1、DP2、DP3代表3个动力定位设备等级)。
海上移动式平台锚泊定位系统锚索链受力分析

第23卷第2期2008年4月中国海洋平台CH I N A OFFSHORE P LATF OR M Vol .23No .2Ap r .,2008收稿日期:2007-10-10作者简介:孙宁松(19732),男,工程师,从事工程建设管理。
文章编号:100124500(2008)022041204海上移动式平台锚泊定位系统锚索链受力分析孙宁松(胜利石油管理局基建处,东营257000) 摘 要:根据环境条件,对海上移动式平台的定位锚泊系统进行分析,通过该系统的计算公式,对锚泊系统进行合理化设计,使其满足实际工程应用的需要。
关键词:移动式平台;定位锚泊系统中图分类号:P752 文献标识码:ATHE ANALY S I S ANCHO R I NG CABL E I NTENS I TY MO B I L E FO RO FFSHO RE PLATFO R M MOO R I NG LOCAL SY STE MS UN N ing 2song(Sheng L i oil field cap ital constructi on depart m ent,Dongying200057,China ) Abstract:Considering the envir onment conditi ons,the anchor syste m of the moveableoffshore p latf or m has been analyzed and designed rati onally based on the calculating f or mula ofthe syste m t o meet the p ractical engineering require ments .Key words:mobile p latf or m;l ocal anchoring syste m0 引 言随着世界经济和技术的发展,海洋开发已成为全球技术革命的重要组成部分,而海洋油气开发又是当今海洋开发工程的主要内容之一。
海结原理(10)-锚泊定位1

一、概述
2. 动力定位系统
是浮式钻井船或半的位置的一种定位系统。 主要包括传感器、控制和推进器三个系统 组成。 价格昂贵,一般仅在锚定位有困难或深水 区才采用动力定位系统。
一、概述
3. 锚泊系统的布置形式
(1)临时锚泊系统
S代表两端横向距离替代x,h代表水深替代y,并将Tb与b 换成T和 得 到如下方程组:
a 0, Ta T0
(3) 对单一锚泊线的方程整理
Wl y T0 T0 x T
Wl tg T0
(14)
2
T T0 Wh T0 W 2l 2 T0 1 S sh tg W
(2) 微元静力微分方程
Tb
l
Td W cosdl dT W sin dl
dT Wdy
(5) (6) (9)
b
y
T0
a
T0 Ta cosa Tb cosb
Tb Ta Wdy
a b
Ta
Wl
x
Tb Ta Wy
由于 (7) (8)
(10)
dx cosdl dy sin dl
P
A a b F
T
=17~20度合适
锚柄拉力:T 锚重力:P 锚爪面土壤阻力:F F与锚爪面法向夹角b与土壤摩擦力有关 锚能入土的条件是T、P、F三个力对点A 的力矩MA>0 锚爪角a的合适范围 a=30~35(沙性土) a=50左右(软土) a=25~30(硬粘土) 拉力T的提升角度(与水平方向的夹角) 提升角=0时爪力最大; Tmax与土壤、锚埋藏深度、锚爪有效面积 与锚爪面的粗糙度因素有关;
Tb
l
b
y
Td W cos dl
移动式钻井平台的介绍
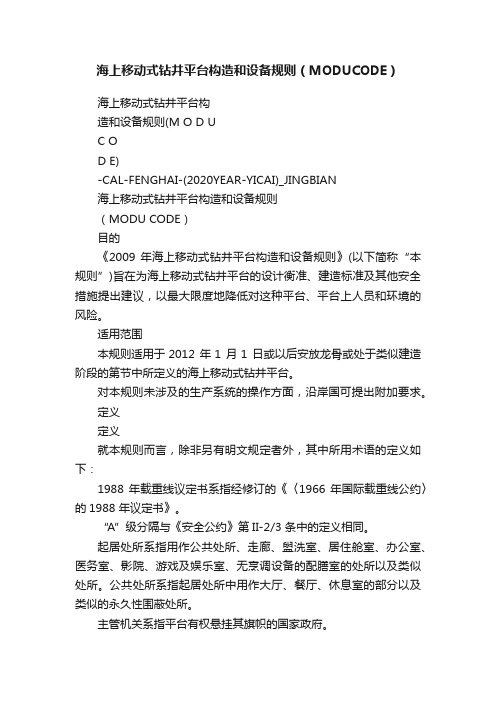
移动式海上钻井平台介绍及新技术的运用一,概述海洋占地球表面积70. 9%,平均深度约为3 730 m, 90%以上的水深为200 m~6 000 m,大量海域面积的资源尚待开发,尤其是石油、天然气等重要经济、战略物资。
据地质学家预测,海底石油天然气总储量约2 500亿吨。
我国是一个海洋大国,在约300万平方公里的海洋辖域内蕴藏着丰富的石油和其它重要资源。
加强开发我国海底石油资源对我国的经济发展有着十分重要的意义。
这就需要一批适合我国海洋石油开采的装备,所以首先对海上石油开采装备,即海上钻井平台进行初步了解显得很必要。
二,平台类型介绍在海上油田的勘探开发过程中,不论是在勘探阶段钻勘探井,还是在开发阶段钻生产井,均要在海上石油钻井平台上进行作业。
海上石油钻井平台大体上可分为固定式和移动式两大类。
固定式钻井装置包括:桩基(导管架)式平台和重力式平台,用于深水作业的顺应式平台,如牵索(绷绳)塔式平台、张力腿式平台、浮力塔式平台;用于浅水作业的人工岛。
移动式钻井装置包括坐底式钻井平台、自升式钻井平台、半潜式钻井平台、钻井船、张力腿式平台和牵索塔式平台。
鉴于我国的海上石油钻井平台大多采用移动式平台,所以重点对各种移动式平台的特点进行探讨。
1,坐底式钻井平台是一种由沉垫(浮箱)、立柱、上层平台(甲板)和抗滑桩等部分组成的移动式平台。
坐底式钻井平台工作时,先由拖轮将其拖至井位,然后灌水下沉,沉垫坐底后,打好抗滑桩,就可钻井作业。
由于坐底式平台甲板高度固定,其工作水深较浅(一般为5m到30m),因而适宜在极浅海区打探井。
这种平台钻垫坐在海底,只要海底土壤密实、平坦无严重冲刷,是比较稳定的,另外平台上设有抗滑桩,可提高平台的坐底稳定性。
坐底式钻井平台的优点是能提供稳定的钻井场地,移动性能好,而且改装后可作为采油平台、储油平台、生活与动力平台等。
缺点是上层平台高度固定,不能调节,工作水深有限;拖航时阻力大;当海底冲刷严重时,钻井易移位,需要采取防滑移、防冲刷及防淘空等措施。
海洋钻井平台的分类海洋钻井平台drillingplatform是主要用于钻探

海洋钻井平台的分类海洋钻井平台(drilling platform)是主要用于钻探井的海上结构物。
平台上装钻井、动力、通讯、导航等设备,以及安全救生和人员生活设施,是海上油气勘探开发不可缺少的手段。
主要分为移动式平台和固定式平台两大类。
其中按结构又可分为:(1)移动式平台:坐底式平台、自升式平台、钻井船、半潜式平台、张力腿式平台、牵索塔式平台(2)固定式平台:导管架式平台、混凝土重力式平台、深水顺应塔式平台坐底式钻井平台坐底式钻井平台又叫钻驳或插桩钻驳,适用于河流和海湾等30m以下的浅水域。
坐底式平台有两个船体,上船体又叫工作甲板,安置生活舱室和设备,通过尾郡开口借助悬臂结构钻井;下部是沉垫,其主要功能是压载以及海底支撑作用,用作钻井的基础。
两个船体间由支撑结构相连。
这种钻井装置在到达作业地点后往沉垫内注水,使其着底。
因此从稳性和结构方面看,作业水深不但有限,而且也受到海底基础(平坦及坚实程度)的制约。
所以这种平台发展缓慢。
然而我国渤海沿岸的胜利油田、大港油田和辽河油田等向海中延伸的浅海海域,潮差大而海底坡度小,对于开发这类浅海区域的石油资源,坐底式平台仍有较大的发展前途。
80年代初,人们开始注意北极海域的石油开发,设计、建造极区坐底式平台也引起海洋工程界的兴趣。
目前已有几座坐底式平台用于极区,它可加压载坐于海底,然后在平台中央填砂石以防止平台滑移,完成钻井后可排出压载起浮,并移至另一井位。
图为胜利二号坐底式钻井平台。
自升式钻井平台由平台自升式钻井平台由平台、桩腿和升降机构组成,平台能沿桩腿升降,一般无自航能力。
工作时桩腿下放插入海底,平台被抬起到离开海面的安全工作高度,并对桩腿进行预压,以保证平台遇到风暴时桩腿不致下陷。
完井后平台降到海面,拔出桩腿并全部提起,整个平台浮于海面,由拖轮拖到新的井位。
1953年美国建成第一座自升式平台,这种平台对水深适应性强,工作稳定性良好,发展较快,约占移动式钻井装置总数的1/2。
海结原理(10)-锚泊定位1.

P
A a b F
T
=17~20度合适
锚柄拉力:T 锚重力:P 锚爪面土壤阻力:F F与锚爪面法向夹角b与土壤摩擦力有关 锚能入土的条件是T、P、F三个力对点A 的力矩MA>0 锚爪角a的合适范围 a=30~35(沙性土) a=50左右(软土) a=25~30(硬粘土) 拉力T的提升角度(与水平方向的夹角) 提升角=0时爪力最大; Tmax与土壤、锚埋藏深度、锚爪有效面积 与锚爪面的粗糙度因素有关;
一般设在平台的首部,系泊时将平台的首部拉住。 这样不论风浪来自任何方向,平台的首部始终迎着波 浪方向,而保持受力较小,活动范围较大。
一、概述
3. 锚泊系统的布置形式
(1)定位锚泊系统
海上风浪可能来自任何方向,因此需要将锚索拉 向四面八方,即呈现辐射状,才能实现定位功能。
通常根据平台的形状布置,矩形平台8(4)根, 三角型平台9(3)根,五角型为10(5)根。 为了提高定位能力在锚索上加预张力,每根锚索加 上相同的预张力。
Tb
l
b
y
Td W cos dl
T T0 / cos
T0 1 dl d 2 W cos
(5) (6)
T0
使提升角等于0,必须使锚索具有足够的 长度。
(1) 微元静力分析
y T
T dT dl
d
dy
T0 无弹性悬垂线 x
T
Wdl dx
(T dT ) cos( d ) T cos 0 (T dT ) sin( d ) T sin Wdl 0
(1) (2)
(2) 微元静力微分方程
T dT dl
d
dy
第9章 海洋移动式平台设计

第九章海洋移动式平台设计9.1概述海洋资源丰富,海洋开发已成为全球经济与技术发展的重要组成部分,而海洋油气开发又是当今海洋开发的主要内容之一。
海洋移动式平台是海洋油气勘探、开发的主要手段。
除了钻井平台以外,生活动力平台、作业平台、生产储油平台等也可以采用移动平台的形式。
海洋移动式平台中,目前数量最多的是自升式平台和半潜式平台。
本章主要围绕这两种平台,简要介绍平台设计的基本知识。
下面先简要介绍一下自升式平台和半潜式平台的构造形式及操作情况。
9.1.1自升式平台简介1.自升式平台的构造形式自升式平台由一个平台主体(漂浮于水面时为浮体)和若干桩腿所组成,如图9.1.1所示。
通过升降装置的动作,平台主体或桩腿可垂直升降。
图9.1.1 自升式钻井平台(1)平台主体自升式平台的主体通常是一个具有单底或双层底的单甲板箱形结构。
甲板以下布置柴油发电机舱等动力舱室、泥浆泵舱等钻井工程用舱室和其他工作舱室,以及燃油舱、淡水舱、压载水舱等液体舱,如设双层底,则燃油及淡水布置在双层底内。
甲板上布置钻台与井架、钻杆与隔水管堆场、管架、起重机、生活舱室、升降装置室、直升机平台等。
主体的平面形状和桩腿的数目密切相关,一般有三角形(三腿)、矩形(四腿)和五角形(五腿)等,如图9.1.2所示。
图9.1.2 平台主体的平面形状根据平台主体的型式,自升式平台可以分为井口槽平台和悬臂梁平台。
前者在平台主体的尾端有槽口,钻台及井架位于井口槽的上面,钻台上的钻杆向下通过井口槽到达海底。
悬臂梁式平台不在主体结构上开槽,但在甲板上设有两道相互平行的钢梁,钻台及井架安置在钢梁上,钢梁可在滑轨上移动并连同钻台及井架一起伸向平台尾端舷外,成为悬臂式结构(见图9.1.1)。
悬臂式钻井平台不仅可以钻勘探井,而且,由于其悬臂(连同钻台及井架)可以伸到小型导管架生产平台的上面,因此还可以钻生产井,或进行修井作业。
相比之下,井口槽式平台很难在导管架式生产平台的上面钻生产井或进行修井等作业。
海上移动式钻井平台构造和设备规则(MODUCODE)
海上移动式钻井平台构造和设备规则(MODUCODE)海上移动式钻井平台构造和设备规则(M O D UC OD E)-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN海上移动式钻井平台构造和设备规则(MODU CODE)目的《2009 年海上移动式钻井平台构造和设备规则》(以下简称“本规则”)旨在为海上移动式钻井平台的设计衡准、建造标准及其他安全措施提出建议,以最大限度地降低对这种平台、平台上人员和环境的风险。
适用范围本规则适用于2012 年1 月1 日或以后安放龙骨或处于类似建造阶段的第节中所定义的海上移动式钻井平台。
对本规则未涉及的生产系统的操作方面,沿岸国可提出附加要求。
定义定义就本规则而言,除非另有明文规定者外,其中所用术语的定义如下:1988 年载重线议定书系指经修订的《〈1966 年国际载重线公约〉的1988 年议定书》。
“A”级分隔与《安全公约》第II-2/3 条中的定义相同。
起居处所系指用作公共处所、走廊、盥洗室、居住舱室、办公室、医务室、影院、游戏及娱乐室、无烹调设备的配膳室的处所以及类似处所。
公共处所系指起居处所中用作大厅、餐厅、休息室的部分以及类似的永久性围蔽处所。
主管机关系指平台有权悬挂其旗帜的国家政府。
周年日期系指与有关证书期满之日对应的每年的该月该日。
辅助操舵装置系指在主操舵装置失效时使舵运动以便操纵平台的设备。
“B”级分隔与《安全公约》第II-2/3 条中的定义相同。
“C”级分隔与《安全公约》第II-2/3 条中的定义相同。
证书系指《海上移动式钻井平台安全证书》。
沿岸国系指对平台的钻井作业行使行政控制的国家政府。
柱稳式平台系指用立柱或浮筒将主甲板与水下船体或基础相连接的平台。
连续“B”级天花板或衬板系指仅终止于“A”级或“B”级分隔处的“B”级天花板或衬板。
控制站系指平台无线电设备、主要航行设备或应急电源所在的处所,或者是火警指示器或失火控制设备或动力定位控制系统集中的处所,或服务于各部位的灭火系统所在的处所。
海上钻探作业平台的抛锚定位
海上钻探作业平台的抛锚定位
丁加宏;周永
【期刊名称】《中国高新科技》
【年(卷),期】2024()4
【摘要】通常用于海上钻探的平台分为自升式平台和浮式平台。
浮式平台按其泊位形式又分锚泊定位与动力定位。
对于浅海、近海工程钻探,主要使用锚泊定位,即在锚泊设备的作用下使钻探平台船在海上定位且漂移量很小。
钻探平台在海上抛锚停泊时所使用的装置和机械统称为锚泊设备,主要包含锚、锚绳、绞锚机械、锚绳导向及系绳桩(将军柱)、发电机组等。
【总页数】3页(P116-118)
【作者】丁加宏;周永
【作者单位】江苏省水文地质海洋地质勘查院
【正文语种】中文
【中图分类】TU195
【相关文献】
1.抛锚定位法作业在河道横断面测量中的应用
2.海上钻探作业船组装及定位技术应用实例
3.浅谈动力定位系统在起抛锚作业中的应用
4.浅析半潜式钻井平台起抛锚作业流程及要点
5.半潜式钻井平台预抛锚作业研究
因版权原因,仅展示原文概要,查看原文内容请购买。
海洋石油钻采装备与结构 第九章 海洋浮动钻井船升沉补偿系统

第九章海洋浮动钻井船升沉补偿系统第一节海上浮动钻采装置的运动1、运动分类(1)直线运动:纵荡(进退)surge:沿x方向的直线运动。
横荡(横移)sway:沿y方向的直线运动。
升沉heave:沿z方向的直线运动。
(对钻井影响最大)(2)旋转运动:横摇roll:绕x轴的转动。
纵摇pitch:绕y轴的转动。
平摇yaw:绕z轴的转动。
2、升沉运动对钻井作业的影响1)引起井底钻压变化。
钻井时,钻头需要一定的压力才能破碎岩石,实现钻进。
如果用浮动钻井平台,大钩及井下钻柱会随平台做升沉运动,从而使钻压不稳,严重时会使钻头脱离井底,无法钻进。
2)引起大钩动载。
钻井时,大钩上挂着钻杆柱。
如果大钩随平台一起做升沉运动,大钩所受的载荷等于钻柱的静载和动载之和。
3)使钻井设备发生疲劳破坏。
在交变载荷的作用下,构件容易产生疲劳破坏。
4)引起井下器具的位置变动。
第二节海洋浮动钻井船的升沉补偿装置深海钻井时,需采用半潜式钻井平台或钻井浮船。
它们在波浪作用下,将产生周期性升沉运动,并使钻柱上下往复运动。
因而造成井底钻压变化,影响钻进,甚至使钻头脱离井底,无法钻进,故必须采取钻柱升沉运动的补偿措施。
一、钻柱升沉措施的补偿措施(一)增加伸缩钻杆这种办法实在钻柱的钻铤上方加一根可伸缩的钻杆。
伸缩钻杆由内、外管组成,沿轴向可作相对运动,行程一般为2m。
当平台上下升沉运动时,伸缩钻杆的内管随伸缩钻杆以上的钻柱作轴向运动,而与伸缩钻杆外管相连的钻铤则基本不作升沉运动。
因而可保持钻压恒定,同时还可避免平台上升时提起钻铤,平台下沉时压弯钻柱。
1、伸缩钻杆的组成目前应用的有全平衡式和部分平衡式两种。
图9—1全平衡式伸缩钻杆伸缩钻杆工作时,在内管和下工具接头间的环形截面上作用有钻柱内的高压泥浆,因而产生张开力。
同时,从井筒中返回的泥浆作用在伸缩钻杆外以上部分受压,故必须采取措施平衡此张开力。
为此,在伸缩钻杆中间设的置一个密封的平衡压力缸,它和流经伸缩钻杆内孔的高压泥浆相通,并使高压泥浆在平衡缸中产生的轴向力和张开力平衡,所以叫全平衡式。
海洋工程锚泊定位系统技术发展分析

海洋工程锚泊定位系统技术发展分析发布时间:2022-08-17T01:59:04.228Z 来源:《当代电力文化》2022年7期作者:翟灵慧[导读] 海洋浮式装置锚泊定位系统中所涉及的锚是使装置保持船位的关键设备。
随着海洋工程的发展,翟灵慧国家知识产权局专利局专利审查协作江苏中心江苏苏州 215000摘要:海洋浮式装置锚泊定位系统中所涉及的锚是使装置保持船位的关键设备。
随着海洋工程的发展,已涌现出各种类型的海洋工程装置用锚。
本文对锚泊系统的发展路线进行了简单的分析。
关键词:锚泊,路线,动力,空吸前言锚可以从多个角度进行分类,且其分类往往有重叠。
因此本文主要是从锚的固定方式角度对锚泊系统的技术分解。
从如何将锚固定海底的角度来看,其固定方式主要分为如下三种:(1)通过空吸作用固定。
采用吸力跟踪器进行安装,吸力跟踪器如同吸力桩,吸力桩一般为钢制圆柱形筒体结构,底部敞开,顶部是封闭的。
然后不断的抽去吸力桩内的水,使筒体内部压力下降。
内外压力差产生的垂直向下的压力作用在筒体顶部,使筒体不断被压入土中,直至筒体内的水全部抽光,贴紧底质为止。
(2)动力方式。
其主要利用火药爆炸或其他动力例如火箭推进器等将锚体射入底层。
为了解海洋工程用锚泊系统技术领域的技术内容,下面主要针对技术分解的两类锚泊系统进行专利分析。
一、空吸式锚泊定位装置图1空吸式锚泊定位装置的发展路线图空吸式锚泊定位装置作为锚泊定位系统中最为常用的一种定位方式最早起源于20世纪60年代,并随着现代技术的不断发展一直持续到现在,通过对空吸式锚泊定位装置国内外发明专利的阅读和研究,空吸式锚泊定位装置主要从吸附方式的改进,而吸力锚一般为钢质圆柱形筒体结构,底部敞开,顶部是封闭的,安装时,首先是把吸力锚下降到海底,靠自重使筒的下缘嵌入底质。
然后,不断地抽去吸力锚内的水,使筒体内部压力下降。
内外压力差产生的垂直向下的压力作用在筒体顶部,使筒体不断地被压入土中,直至筒体内的水全部抽光,贴紧底质为止。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第九章移动式钻井平台的锚泊定位系统第一节锚泊定位概述1、锚泊定位系统它是在海底设置固定的基底设备,用锚泊线将水面系留物(平台)与基底设备联系起来,从而限制系留物(平台)的漂移2、锚系的组成它是由锚(基底设备)、锚链(锚缆)、锚机、锚架、锚浮标等组成。
锚系的分类移动性锚系暂时性锚系永久性锚系3、平台对锚系的要求(1)自升式平台要满足升船前的锚泊定位要求要满足锚泊定位后的移船就位要求要满足拖航过程中对锚泊的要求(2)半潜式平台定位要求最大漂移半径〈5~6%水深常为漂移半径〈2~3%水深拖航与就位的要求控制平台的漂移确保平台的生存拖航时,与自升平台相同移船就位的要求(3)浮式平台的锚泊要求最短出链长度要求:该长度应该大于锚链承受极限张力(1/2锚链破断张力)时的悬链长度,以保证锚前面始终有一段锚链水平躺在海床上,使锚总是承受水平拉力。
锚链张力(锚抓力)试验:即预计的最大锚链张力试验,一般不超过锚链破断张力的1/3。
如张力试验达不到要求,要调大锚爪角,或增加串联锚等。
锚链预张力:根据当平台位移达到5%水深时,锚链张力达到其1/3破断张力来确定4、锚泊系统的布锚方式临时锚泊 定位锚泊第二节 锚泊系统的静力分析一、悬链线它是一种具有均质、完全柔性而无延伸的链或索自由悬挂于两点上所形成的曲线 悬链线方程0cos )cos()(=-++θθθT d dT T (1) 0sin )sin()(=--++wdl T d dT T θθθ (2) θd 很小时,1cos ≈θd ,θθd d =sin忽略θdTd ,则0cos sin =-dT d T θθθ (3) 0sin cos =-+wdl dT d T θθθ (4) 由(4)得:)cos (sin 1θθθd T wdl dT -=,代入(3)得:θθθθθθθθθθθsin cos sin cos )cos (sin cos sin 2d T wdl d T wdl d T -=-=∴ wdl wdl wdl Td θθθθθθθθθθcos )cos (sincos )sin cos (sin sin cos 222=+=+=(5)由(3)得:θθθd dTT sin cos = 代入(4)得0sin sin cos 2=-+wdl dT dT θθθ∴ dl w wdl dT θθθθsin )sin sin cos (2=+= (6)又∵dl dx θcos = (7) dl dy θsin = (8)b b a a o T T T θθcos cos == (9)即悬链线的水平张力相等,由⑹和⑻式,得wdy dT =在a,b 段上积分:⎰⎰=b aT Tywdy dT 0 wy T T a b +=∴ (10)由(5)式得:θθcos w Td dl =,代入(8)式得: θθθcos sin w Td dy =由于θcos o T T =,代入上式得:θθθd w T dy o 2cos sin =积分:θθθθθd w T dy ba o y⎰=⎰20cos sin )11()cos 1cos 1(22+-+=-=∴a b o abo tg tg wT wT y θθθθ (11)同理由⑸和⑺式得 θθd w T dx ocos 1=θθθθd w T dxb a oy⎰=⎰cos 10 )]]()([)1ln()1[ln(1122a b o a a b b o tg shtg shwT tg tg tg tg wT x θθθθθθ---=++-++= (12)由(5)式得:θθd w T dl o2cos 1=θθθθd w T dl b ao l ⎰=⎰20cos 1)(a b o tg tg wT l θθ-=(13)注意:a 点并未与海底相切((9)—(13)是锚链线静力分析的基本公式二、锚泊线静力分析1、 单一成分锚泊线以0=a θ,0T T a =,并将b θθ→,b T T →,y h →,x s →代入⒀ ⑽ ⑿ ⑾ 则可得如下的公式:o T wl tg =θ (14)22)(o o T wl wh T T +=+= (15))()(11θtg shwT T wl shw T s o o o --==(16)]1)([]11[]11)([22-=-+=-+=o o o o o T ws ch wT tg wT T wl wT h θ (17)以上公式共有七个变量:θ、w 、l 、T 0、T 、h 和s如果已知h 、w 和锚泊线上端所受的水平力Q (Q =T 0)便可由上述公式求出l 、T 、θ、s 若已知h 、l 、w 则可求出最大外力Q m 及θ、T 、s若实际所受外力Q<Q m ,则锚泊线未全部提起,则可根据 h 、w 、Q 计算出实际提起的悬垂长度l 及其它参数若Q>Q m ,则锚泊线全部提起且下端倾角必大于零这时应根据公式⑼至⒀计算各相关参数 2、二成分锚泊线注意各符号的意义 o T Q → 便得:Q l w l w tg )(22111+=θ (18) Q l w tg 222=θ (19)2222112211)(Ql w l w l w l w Q T ++=++= (20))]()([211111θθtg sh tg shw Q s ---=(21))(2122θtg shw Q s -=(22)21s s s += (23)]11[221211+-+=θθtg tg w Q h (24))11(2212-+=θtg w Q h (25)21h h h += (26)上面九个公式中共有十四个变量:若已知w 1、l 1、w 2、l 2、h 便可计算出保悬链线下端张力水平时,其上端所能承受的最大水平外力Q m 及其他参数(采用迭代法,先假设一个Q 值) 迭代法先假设一个Q 值,代入(18)、(19)式可算θ1、θ2。
将求得的θ1θ2和已知的w 1w 2及假设的Q 代入(24)、( 25 ),就可算出h 1和h 2。
再检验h 1+h 2是否等于h 。
若不等,就修正Q 值,再重复上一过程,直至h 1+h 2与h 的差值达到所要求的精度为止,这在计算机上是很容易实现的,其它参数也就容易解出了。
若已知w 1 ,l 1,w 2,h 和预张力T p ,要确定在预张状态下悬垂长度l 及其他相应参数,则可能出现多种情况:(1)若l 1>h ,则有三种情况:l 1没有被完全提起 l 1恰好被完全提起不仅l 1全部提起且l 2被部分提起以上三种情况应根据公式T=Q+w 1h 来进一步判断Q=T p -w 1h 的大小 若01<-=h w T Q p 所给条件有矛盾(加大p T ) 0=Q 表明水平外力为零,锚泊线自由下垂 0>Q 为正常情况,这时进一步比较122w QT p -与1l 的大小若1122l w QT p <-,表明1l 未全部提起,这时预紧状态下悬链线长度为122w Q T p -若1122l w Q T p =-,表明1l 恰好全部提起,这时预张状态下悬链线长度为1l若1122l w QT p >-,表明1l 长度不足,下段2l 也要提起一部分,按⒅至(26)式用迭代法先假设一个'2l ,按公式(20)计算出Q ,再代入(18)、(19)式中可算出1θ、2θ,将1θ1h 2θ1w 1l Q 1s 2w 2l Tsh 2s 2h已知代入(24)、(25)中,可算出h 1、h 2,再检验h 1+h 2是否等于h 。
若不等,就修正2l 值,再重复上一过程,直至h 1+h 2与h 的差值达到所要求的精度为止,其它参数也就容易解出了注意:实际下段长度2l 应大于假设的'2l(2)若h l ≤1,则有以下几种情况: h l =1时,若01=-=h w T Q p ,恰好提起1l0<Q 所给条件有矛盾0>Q 正常 (按二成分计算,方法同样是先假设一个'2l )h l <1时,若0)(121<---=l h w h w T Q p ,所给条件有矛盾0=Q 说明水平外力为零,锚泊线自由下垂,全部1l 提起和部分2l (其长度1'2l h l -=)0>Q 正常 说明2l 被斜提起一部分(用二成分 按迭代法先假设一个'2l )。