lect10-debug1
Q系列CC-Link网络系统

A-2
A-2
[接线注意事项]
! 小心
● 不要抓住电缆拆除连接在模块上的通讯电缆。 当拆除带有连接器的电缆时,抓在连接器与模块相连的一侧。 当拆除没有连接器的电缆时,松开与模块相连一端的螺钉。 拉拔仍连接在模块上的电缆可能会损坏模块或电缆,或者由于电缆接触不良引起故障。
[启动和维护注意事项]
! 危险
目录 安全注意事项..................................................................................................................................................A- 1 修订.................................................................................................................................................................A- 4 目录.................................................................................................................................................................A- 5 关于手册 .........................................................................................................................................................A- 8
HPLC 岛津LC-10AD常见问题处理
高效液相色谱仪常见故障处理LC-10AT高效液相色谱仪是日本岛津公司1996年的产品检车器为可变波长紫外检车器色谱柱为岛津公司的ODS-C18,大连依利特的ODS-C18. 八年的日常工作中遇到了几种故障, 如故障1经咨询该公司的工程师后,得以解决,故障2,5 是频繁碰到的问题等特做总结如下故障1 流动相内有气泡关闭泵打开泄压阀打开PURGE 键清洗脱气,气泡不断的从过滤器冒出, 进入流动相, 无论打开PURGE 键几次都无法清除不断产生的气泡.原因过滤器长期沉浸于乙酸铵等缓冲液内,过滤器内部由于霉菌的生长繁殖,形成菌团阻塞了过滤器, 缓冲液难以流畅的通过过滤器, 空气在泵的压力下经过过滤器进入流动相.处理过滤器浸泡在5%的硝酸溶液内, 超声清洗几分钟即可; 亦可将过滤器浸泡在5%的硝酸溶液中12-36小时, 轻轻震荡几次, 再将过滤器用纯水清洗几次, 打开泄压阀,打开PURGE键清洗脱气如仍有气泡不断从过滤器冒出, 继续将过滤器浸泡在5%硝酸溶液中, 如没有气泡不断从过滤器冒出,说明过滤器内部的霉菌菌团以被硝酸破坏, 流动相可以流畅的通过过滤器打开泄压阀打开泵流速调治1.0-3.0ML|MIN, 纯水冲洗过滤器1小时左右. 即可将过滤器清洗干净.关闭泄压阀纯甲醇冲洗半小时即可故障2 柱压高原因(1)缓冲液盐份如(乙酸铵等)沉积柱内;(2)样品污染沉积.处理对于第一种情况先用40-50度的纯水, 低速正向冲洗柱子待柱压逐渐下降后相应的提高流速冲洗柱压大幅度下降后用常温纯水冲洗, 之后用纯甲醇冲洗柱子30分钟, 对于第2种情况,由样品的沉积引起污染的C18柱, 和纯水反向冲洗柱子,然后换成甲醇冲洗, 接着用甲醇+异丙醇[4+6]冲洗柱子[冲洗时间的长短由样品的污染情况而定] , 在用换成甲醇冲洗, 然后用纯水冲洗,最后甲醇冲洗正向冲洗柱子30分钟以上故障3既无压力指示又无液体流过[1]原因1 泵密封垫圈磨损 2 大量气体进入泵体.处理对于第一种情况,更换密封垫圈;对于第二种情况,在泵作用的同时,用一个50ml的玻璃针筒在泵的出口处不帮助抽出空气.故障4 压力波动大,流量不稳定.原因;系统中有空气或者单向阀的宝石球和阀座之间家有异物,使得两者不能密封.处理:工作中注意流动相的量.保证不锈钢滤器沉入储液器瓶底,避免吸入空气,流动相要充分脱气.如为单向阀和阀座之间夹有异物,拆下单向阀,放入盛有丙酮的烧杯用超声波清洗.故障5 出峰不准,峰分叉.原因(1)色谱柱被污染,(2)柱头填料塌陷.处理对于第一种情况,先用纯水反向冲洗柱子,然后换成甲醇冲洗,接着用甲醇+异丙醇(4+6)冲洗柱子(冲洗时间的长短由样品污染的情况而定),再换成甲醇冲洗,然后再用纯水冲洗,最后甲醇冲洗正向冲洗柱子30分钟以上.如冲洗后依然出峰不佳,则考虑第二种情况.对于第二种情况,拧开柱头,检查柱填料是否硬结或塌陷.去除硬结部分(污染的填料),装入新填料,滴一滴甲醇,填料下陷,再填,用与助内径相同的顶端平滑的不锈钢杆压紧,再填平,滴甲醇,再压紧反复几次,直至装满填平.柱头用甲醇冲洗干净,擦净柱外壁的填料,拧紧柱头,用纯甲醇冲洗30分钟以上.故障6 峰面积重复性不佳.原因(1)进样阀漏夜;(2)加样针不到位.处理;对于第一种情况更换进样垫圈;对于第二种情况保证加样针插到底,注射样品溶液后须快速,平稳地从LOAD状态转换到INJECT状态,以保证进样量的准确.日常生活中,液相色谱仪的保养非常重要,如要注意不要让空气进入输液系统和高压泵中,储液器内的溶液如时间未用应清洗储液器并更换溶液,每次用完色谱仪后缓冲溶液要用纯水冲洗干净,防止无机盐析出或沉积;样品的前处理也很重要,任何样品都要尽可能地去除杂质,完全溶解,尽量减少对色谱柱的污染,以延长色谱住的使用寿命,同时避免注射过量浓的样品溶液,以免残留液在进样阀内析出固体引起堵塞;色谱住作好标记,用于不同分析目的的色谱住不要混用等.。
ICDPPCNEXUS MPC55xx MPC56xx In-Circuit Debugger
ICDPPCNEXUSMPC55xx / MPC56xx In-Circuit DebuggerQuick Start GuideCopyright 2009, P&E Microcomputer Systems, Inc. All rights reserved.Visit us on the web at Document Version HistoryVersion Date Notes1.0 21 Sep 2009 Initial versionCONTENTS1 Introduction (4)1.1 P&E Compatible Hardware (4)2 Getting Started (5)2.1 Connecting to your Target (5)2.2 Reset Script (6)2.3 Loading Data and Debug Information (7)2.4 CPU and Memory Windows (8)3 Debugging (10)3.1 GOTIL command (10)3.1 Stepping through C instructions (11)3.3 Setting and Reaching Breakpoints (12)3.4 Using Code Window Popup Debug Evaluation Hints (13)3.5 Using the Variables Window (15)3.6 Modifying a Variable (16)3.7 Using the Register Interpreter (17)3.8 Adding Register Field Descriptions to the Variables Window (20)1 IntroductionThis document is a step-by-step guide to using the P&E ICDPPCNEXUS in-circuit debugger software, which is compatible with Freescale MPC55xx / MPC56xx processors. This guide covers the most commonly used features of the debugger: loading binary & debug information, accessing CPU registers & memory, stepping code, setting breakpoints, and monitoring variables.1.1 P&E Compatible HardwareThe following lists the P&E hardware compatible with the ICDPPCNEXUS debugger software.P&E Part Number Interface to host PCCABPPCNEXUS Parallel (LPT) portUSB-ML-PPCNEXUS USB 2.0 (Backwards compatible with USB 1.1 ports) Cyclone MAX Serial (RS232) portUSB 1.1 (Upwards compatible with USB 2.0 ports)Ethernet2 Getting Started2.1 Connecting to your TargetUpon starting the debugger, the connection assistant dialog appears:•Use the “Interface” and “Port” drop-down menus to choose the P&E hardware interface connected between the PC and your target board.•The “Target CPU” setting can safely be left at the “Autodetect” setting for most users. If you experience problems connecting, you can try specifying the exact Freescale device that you are connecting to.• A BDM_SPEED parameter between 2 to 4 can typically be used.Processors running at slower clock speeds will require higher values.Click the Connect button, and ICDPPCNEXUS will attempt to contact the processor. Using the default debugger settings, ICDPPCNEXUS will establish communications and reset the processor.After establishing communications, the main debugger screen will appear, and a debugger reset script macro should automatically execute and complete.2.2 Reset ScriptThis section explains the initialization that the debugger, using a reset script macro file, performs on the processor. The user can view and modify all of the macro file's initialization tasks.The processor Boot Assist Module (BAM) would normally initialize the memory of the processor. However, when running the target application from the debugger, the BAM functionality is disabled. To account for this, the debugger must run a script file on reset. The script initializes the memory of the processor similar to the way in which the BAM would initialize the processor.If ICDPPCNEXUS is launched from the Freescale CodeWarrior IDE, the correct reset script file is automatically selected.If ICDPPCNEXUS is launched stand-alone, the reset script file may need to be configured. Several reset script macros are included with the ICDPPCNEXUS debugger and have a .mac extension. For detailed information, you can view each macro file using a simple text editor such as Notepad. The macro contents will contain useful comments, such as which devices are supported by that particular macro.To configure the debugger reset script macro, select the debugger Configuration menu, Automated Script Options dialog, shown here:2.3 Loading Data and Debug InformationIf ICDPPCNEXUS is launched from the Freescale CodeWarrior IDE, your code will automatically be downloaded to the processor.•RAM projects are loaded into the processor’s internal SRAM.•FLASH projects will invoke the CPROGPPCNEXUS Flash programming software to burn the code into the processor’s internal FLASH.The debug information is also automatically loaded from CodeWarrior, which will allow you to debug using your high level source code and variables.If ICDPPCNEXUS is launched stand-alone, you will need to manually download the code and debug information. Launch the Load Dialog by clicking on the High Level Load button on the debugger tool bar:This dialog allows you to specify the binary/debug file and whether to load into RAM or FLASH. Once you are satisfied with your settings, press the “Process Load Command” button to begin the download process. This step will also load the debug information.2.4 CPU and Memory WindowsThe CPU Window displays all CPU core registers, including the Program Counter (PC) and all general purpose registers.•To modify CPU register contents, double-click the register value. You will be prompted for a new value.The Memory Window displays data at any given memory address. It can be used to view RAM contents, FLASH contents, and values of peripheral registers.•To change the memory address, right-click inside the Memory Window and select “Set Base Address”. You will be prompted for a new address to begin displaying data.•To change the contents in memory, double-click the value in memory that you would like to change. You will be prompted for a new value.3 DebuggingThis section outlines the different debugging capabilities available in the ICDPPCNEXUS debugger once the debug information has been loaded.3.1 GOTIL commandAt this point, your source window will show the assembly language startup code generated by the compiler:If you do not need to debug this section and would like to run the processor until the beginning of your “main” function, you can use the “GOTIL” command.•Type “GOTIL main” in the Status window to tell the debugger to run code until it reaches the “main” function of your code.The “GOTIL” command works with any function in your code.3.1 Stepping through C instructionsStep through the initialization code, or any source code, using the high-level language source step command. Use this feature by typing “HSTEP” in the Status window or by clicking the high-level step button on the debugger tool bar:Each time the HSTEP command executes, the debugger will rapidly single step assembly instructions until it encounters the next source instruction, at which point target execution will cease. When the debugger reaches the next source instruction, all visible windows will be updated with data from the board. After reaching the main function, step through several C language instructions. Notice that some instructions will take longer to step through than others because each C instruction may consist of a greater or fewer number of underlying assembly instructions.3.3 Setting and Reaching BreakpointsIn the source code window, there will be a small red dot and a small blue arrow next to each source instruction that has underlying object code. If a large blue arrow appears on a source line, this indicates that the program counter (PC) currently points to this instruction. If a large red stop sign appears on the source line, this indicates that a breakpoint exists on this line.•Set a breakpoint at an instruction by double-clicking the tiny red dot.•To remove a breakpoint, double-click the large red stop sign.Execution will begin in real-time when you issue the HGO command or click the high-level language GO button on the debugger tool bar:If the debugger encounters a breakpoint, execution will stop on this source line. If it does not encounter a breakpoint, target execution will continue until you press a key or use the stop button on the debugger tool bar:•By double clicking the small blue arrow, you will be issuing a GOTIL command to the address of this source line.A GOTIL command will set a single breakpoint at the desired address, and the processor will begin executing code in real-time from the current program counter (PC). When the debugger encounters the GOTIL address, execution stops. If the debugger does not encounter this location, execution continues until you press akey or use the stop button on the debugger tool bar. Note that all user breakpoints are ignored when the GOTIL command is used.You may also double-click the red and blue symbols in the disassembly window. The disassembly window may display an additional symbol, a small, blue "S" enclosed in a box. This indicates that that a source code instruction begins on this disassembly instruction.3.4 Using Code Window Popup Debug Evaluation HintsWhen debugging source code, it is convenient to view the contents of a variable while viewing your source code. The in-circuit debugger has a feature, debug hints, which displays the value of a variable while the mouse cursor is held over the variable name. The hint may be displayed in any of three locations, as shown below.The three locations for the debug hints are the code window title bar, the status window caption bar, and a popup hint that appears over the variable in source code. You can configure the hints to display in any combination.•Set the locations of debug hints in the configuration menu of the debuggerThe information in the popup hint box is similar to the information displayed in the variables window.The information includes the variable name (i), value ($1), and type (signed long).3.5 Using the Variables WindowThe variables window displays the current value of application variables. The following window shows a display of variables from the example application.Variables that are pointer or reference types are displayed in red. Normal variables are displayed in black.•Add a variable by typing the VAR command, by right clicking the variables window and choosing “Add a variable”, or by hitting the "Add Variable"button in the variables window.When adding a variable using the pop-up menu, the debugger displays the following screen.In the variable field, type the address or name of the variable. Typically, set the type of the variable to “Default”, which means that the variable will be displayed as it is defined in the debugging information. When adding a variable, you may specify the numeric display base of the variable.3.6 Modifying a Variable•To modify the current value of a variable, right-click the variable name in the variables window and select “Modify Variable” to display a dialog.Check the “Modify value” checkbox, and type the variable’s new value. After you click the OK button, the debugger updates the variable value on the target, and the debugger refreshes the variable window to display the new value. Note that the debugger will not edit certain user-defined types, such as enumerated types.•You may also modify a variable’s display properties, such as the type or numeric display base using this dialog.3.7 Using the Register InterpreterThe register interpreter provides a descriptive display of bit fields within the processor’s peripheral registers. The register interpreter allows you easily to change the value of these registers. You may quickly check the current state of a peripheral and examine the configuration of the target device.When you use the register interpreter within the debugger, it reads the current value of the peripheral register, decodes it, and displays it.To launch the register interpreter in the debugger, either use the “R” command or click the view/edit register button on the tool bar:A window will appear that allows you to select a peripheral block to examine.Double clicking the module of choice will launch the register selection window.Double clicking a specific register will launch the edit/display window for that register.The window lists the keystrokes and mouse actions, allowing you to modify the values of each of the fields. After right clicking on a specific field, the register interpreter will display all options for that field.When you quit the register view/edit window by hitting the ESC key, you will be given the opportunity to write the new value into the register, as shown in the following window.3.8 Adding Register Field Descriptions to the Variables WindowAdd register bit fields to the variables window by using the “_TR” command in the debugger or by clicking the "Add Register" button in the variables window. After selecting the register field, the field appears in the debugger variables window, and the debugger will continually update its value.。
zilog eZ80F91 Mini Ethernet Module Quick Start Gui
An Company Copyright ©2010 by Zilog ®, Inc. All rights IntroductionThis quick qtart guide provides instructions and configuration information for Zilog’s eZ80F91 Mini Ethernet module, eZ80Acclaim!® Modular Development System (MDS) adapter board, and associated components. The eZ80F910100KIT and eZ80F910200KITG modular development kits are covered in this quick start guide.Kit ContentsFor a complete list of material shipped with the eZ80F91 Modular Development Kit (eZ80F910200KITG), refer to eZ80F910200KITG eZ80F91 Series Development Kit Packing List (PAK0015).System RequirementsTable 1 lists the system requirements for running ZDS II.Table 1. ZDS II System RequirementsRecommended ConfigurationMinimum Configuration •PC running MS Windows XP Professional •PC running MS Win2000–SP4/WinXP Professional•Pentium III/500 MHz or higher processor•Pentium II/233 MHz processor •128 MB RAM•96 MB RAM •110 MB hard disk space•25 MB hard disk space (documentation not installed)•Super VGA video adapter•Super VGA video adapter •CD-ROM drive•CD-ROM drive •One or more RS-232communication port •One or more RS-232 communication port ••USB high-speed port •USB high-speed porteZ80F91 Modular Development KitQuick Start Guide QS004611-0810eZ80F91 Modular Development KitInstallation OverviewThe eZ80F91 Mini Ethernet module is preinstalled on the eZ80Acclaim!® MDS adapter board. To set up the development kit, install the ZDS II software. Connect the kit to PC, using the USB Smart Cable or Serial Smart Cable, as appropriate. Connect power to the adapter board. Figure 1 displays the eZ80F91 Modular Development Kit.Previous versions of the development kit used the Serial Smart Cable. Newkits as of June 2006 uses the USB Smart Cable.Follow the steps below to install the cable available with your kit:1.Install the ZDS II software as described in Installing the ZDS II Software and KitDocumentation on page 3.Figure 1.The eZ80F91 Modular Development Kit2.Connect your PC to the eZ80Acclaim! MDS adapter board as follows:(a)If you are using the Serial Smart Cable, follow the instructions in Connecting theSerial Smart Cable to Your Computer on page 3.(b)If you are using the USB Smart Cable (not included with this kit), follow theinstructions in Installing the USB Smart Cable on page 3.3.Connect the 5 V DC power supply to the adapter board.4.Connect the development kit to your PC and run the supplied sample project asdescribed in Running Sample Projects on page 6.For complete details on developing an application for the development kit, refer to Zilog Developer Studio II–eZ80Acclaim!® User Manual (UM0144), and eZ80F91 Modular Development Kit User Manual (UM0170).Note:eZ80F91 Modular Development KitInstalling the ZDS II Software and Kit DocumentationFollow the steps below to install ZDS II and eZ80F91 development kit documentation: 1.Insert the ZDS II CD into the CD-ROM drive. DemoShield launches automatically. IfDemoShield does not launch automatically, open the Windows Explorer, browse to your CD-ROM drive, and double-click launch.exe to launch the installer.2.Click the Install Products button from the main installer menu. From the productinstaller list you can choose to install only ZDS II, or ZDS II and associated documen-tation. You can also copy the documentation directly from your CD-ROM drive to your hard disk using Windows Explorer.Zilog recommends registering your new ZDS II software. By registering Note:ZDS II, you have access to free technical support, software components, andother tools that only registered Zilog customers have. To register online, go to/CustomerPortal/.Connecting the Serial Smart Cable to Your ComputerConnect the Serial Smart Cable 9-pin DB9 serial connector to a COM port on your com-puter.Connecting the Serial Smart Cable to the MDS Adapter Board Attach one end of the six-conductor ribbon cable to the Smart Cable 6-pin DBG connec-tor. See Figure 2 on page 5. Attach the free end of the ribbon cable to the connector on the eZ80Acclaim!® MDS adapter board. The connectors are keyed to ensure proper align-ment.Installing the USB Smart CableYou can install the USB Smart Cable for the following operating systems:Windows Vista-32Follow the steps below to install the USB Smart Cable for Windows Vista-32:1.Connect the USB Smart Cable to the host PC. The Found New Hardware dialog boxis displayed.2.Select Locate and install driver software (recommended). The Driver SoftwareInstallation window is displayed, and then the Found New Hardware-USB Smart Cable dialog box is displayed.eZ80F91 Modular Development Kit3.Select I don’t have the disc. Show me other options.4.Select Browse my computer for driver software (advanced).5.Browse to one of the following driver directory:<ZDS II Installation Directory>\device drivers\USB<ZDS II Installation CD>\Device Drivers\USBThe Windows Security dialog box is displayed.6.Select Install this driver software anyway.7.When the software has been installed, click Closed.Windows XPFollow the steps below to install the USB Smart Cable for Windows XP:1.Connect the USB Smart Cable to the host PC. The Found New Hardware Wizardshould activate automatically.2.In the Wizard, select Install from a list or specific location (Advanced); then clickNext.If the Windows Logo testing dialog appears, select Continue Anyway.Note:3.Select Search for the best driver in these locations and Include this location insearch.4.Browse to one of the following driver directory:<ZDS II Installation Directory>\device drivers\USB<ZDS II Installation CD>\Device Drivers\USB5.Click Next to locate the appropriate driver.6.Click Next and then Click Finish to complete the installation.Windows 2000Follow the steps below to install the USB Smart Cable for Windows 2000:1.Connect the USB Smart Cable to the host PC for the first time.The Found New Hardware Wizard should activate automatically.2.In the Wizard, click Next.3.Select Search for a suitable driver for my device (Recommended); then click Next.4.Select Specify a location; then click Next.eZ80F91 Modular Development Kit5.Browse to the driver directory, one of the following:<ZDS II Installation Directory>\device drivers\USB <ZDS II Installation CD>\Device Drivers\USB6.Click OK , and then click Next after the appropriate driver is found.7.Click Finish to complete the installation.Connecting the USB Smart Cable to the eZ80Acclaim!® MDS Adapter BoardAttach one end of the six-conductor ribbon cable (included) to the USB Smart Cable 6-pin DBG connector. See Figure 2 on page 5. Attach the free end of the ribbon cable to the DBG connector on the eZ80Acclaim! MDS adapter board. Ensure that pin 1 on the ribbon cable (indicated by the dark stripe) is aligned with pin 1 on the target connector.Disconnect or turn OFF the power to the eZ80Acclaim! MDS adapterboard, before connecting or disconnecting the USB Smart Cable.Applying Power to the Development BoardAfter installing the USB Smart Cable, connect the power supply to the development board at connector J7, and then to an electrical outlet. The Green 3.3 V DC LED illuminates indicating that power is supplied to the board.Figure 2.Connecting the Six-Conductor Ribbon Cable to the Serial or USB SmartCableCaution:eZ80F91 Modular Development KitRunning Sample ProjectsAfter installing the ZDS II software and setting up the hardware, you can open and test the sample software projects for the eZ80Acclaim!® product line. Sample projects are located in the following ZDS II sample directories:C:\Program Files\Zilog\ZDSII_eZ80Acclaim!_<version>\samples\ <processor type>_<demo_name>where <processor type> represents the eZ80Acclaim! device that powers the target module and <demo_name> represents the type of sample. (The LedDemo samples are for the legacy eZ80Acclaim! Development Kit that preceded the eZ80F91 Modular Develop-ment Kit).Running the Sample Starter ProjectA sample starter program is provided in the ZDS II CD-ROM. It demonstrates how to write proper code for the eZ80F91 modular development kit. The program writes a few character strings either to RS-232 PortP2 on the eZ80Acclaim! MDS adapter board, or to the Simulated Universal Asynchronous Receiver/Transmitter (UART) Output window (when running the Simulator Debug Tool).Once you have created your own application program, use ZDS II to download that code into the eZ80F91 for testing and debugging.The starter project is written, such that, it defaults to the RS-232 port version. Connect port 2 on the eZ80Acclaim!® MDS adapter board to your PC before running the sample program.Follow the steps below to build and run the sample program for viewing in HyperTerminal on your PC:1.Connect the DB9 RS-232 port on the eZ80Acclaim! MDS adapter board to an openserial port on your PC.2.Open HyperTerminal.3.On the File menu, click New Connection.4.In the Name field, enter a name that describes the connection.5.In the Icon box, click the appropriate icon, and then click OK.6.In the Connect To dialog box, choose the COM port you connected to the RS-232port on the eZ80F91 MDS adapter board in the Connect using drop-down box.7.In the Port Settings dialog box, set the following options:eZ80F91 Modular Development Kit•Bits per second: 57600•Data bits: 8•Parity: None•Stop bits: 1•Flow control: None8.Click OK. HyperTerminal connects to your kit.unch ZDS II by navigating Start→Programs→Zilog ZDS II - eZ80Acclaim!<Version>→ZDS II - eZ80Acclaim! <Version>.10.From the File menu in ZDS II, choose Open Project, and navigate to the followingfile path:c:\Program Files\Zilog\ZDSII_eZ80Acclaim!_<Version>\samples\StarterProject11.Select the starter.zdsproj project within the above file path and click Open. Alist of source files appears in the Workspace panel.12.Double-click the file main.c in the Workspace panel to open the file in the ZDS IIeditor window. Refer to the header of main.c for details about the project.13.Open the Build menu and select Set Active Configuration.14.In the Select Configuration dialog box, select Debug.15.Click OK to close the Select Configuration dialog box.16.From the Project menu in ZDS II, select Settings. The Project Settings dialog boxappears. In the Project Settings dialog box, select the Debugger page.17.In the Debugger page, select eZ80F91ModDevKit_RAM in the Target list.18.In the Debugger page, select SerialSmartCable or USBSmartCable from theDebug Tool drop-down menu.19.Click OK to close the Project Settings dialog box.20.If closing prompts you to rebuild the affected files, click Yes. Otherwise, select Buildfrom the menu bar and click Rebuild All.21.To run the application, select Debug → Go. Until the default settings are changed, thefollowing output is viewed in the Hyperterminal window:Zilog Developers Studioi = 5eZ80F91 Modular Development Kitd = 25f = 1.260000eZ80F91 5 25 1.260000Viewing the Starter Project Output via the ZDS II Cycle-Accurate Simulator (Optional)Follow the steps below to view the output of the starter.zdsproj project in the ZDS II cycle-accurate simulator:1.In ZDS II, open the starter.zdsproj project.2.Select Settings from the Project menu in ZDS II. The Project Settings dialog boxappears. In the Project Settings dialog box, select the Debugger page.3.In the Debugger page, select eZ80F91ModDevKit_RAM in the Target window bychecking the box next to the specific Target Name.4.In the Debugger page, select Simulator from the Debug Tool drop-down menu.5.Click OK to close the Project Settings dialog box.6.If closing prompts you to rebuild the affected files, click Yes. Otherwise, select Buildfrom the menu bar and click Rebuild All.7.When the build is complete, explore the Debug toolbar for the various debugger fea-tures. To connect to the simulator, select Debug→Reset.8.Open the Simulated UART Output window to view the output of the program.Select View→Debug Windows →Simulated UART Output.9.To run the application, select Debug→Go.10.Until the default settings are changed, the following output is viewed in the SimulatedUART Output window:Zilog Developers Studioi = 5d = 25f = 1.260000eZ80F91 5 25 1.260000ing the cycle-accurate simulator, you can view the sample code to study how itworks.You can obtain a sample Zilog ZTP web application and an embedded security Note:SSL application by following the instructions on your kit registration card.eZ80F91 Modular Development KitRelated DocumentationFor complete details on developing an application for the modular development kit, refer to the following documents:•Zilog Developer Studio II–eZ80Acclaim!® User Manual (UM0144)•eZ80F91 Modular Development Kit User Manual (UM0170)•Zilog TCP/IP Software Suite Quick Start Guide (QS0049)•ZTP Network Security Plug-In (SSL) Quick Start Guide (QS0059)•eZ80F91 MCU Product Specification (PS0192)eZ80F91 Modular Development KitDO NOT USE IN LIFE SUPPORTLIFE SUPPORT POLICYZILOG'S PRODUCTS ARE NOT AUTHORIZED FOR USE AS CRITICAL COMPONENTS IN LIFE SUPPORT DEVICES OR SYSTEMS WITHOUT THE EXPRESS PRIOR WRITTEN APPROVAL OF THE PRESIDENT AND GENERAL COUNSEL OF ZILOG CORPORATION.As used hereinLife support devices or systems are devices which (a) are intended for surgical implant into the body, or (b) support or sustain life and whose failure to perform when properly used in accordance with instructions for use provided in the labeling can be reasonably expected to result in a significant injury to the user. A critical component is any component in a life support device or system whose failure to perform can be reasonably expected to cause the failure of the life support device or system or to affect its safety or effectiveness.Document Disclaimer©2010 by Zilog, Inc. All rights reserved. Information in this publication concerning the devices, applications, or technology described is intended to suggest possible uses and may be superseded. ZILOG, INC. DOES NOT ASSUME LIABILITY FOR OR PROVIDE A REPRESENTATION OF ACCURACY OF THE INFORMATION,DEVICES, OR TECHNOLOGY DESCRIBED IN THIS DOCUMENT. ZILOG ALSO D O E S N O T A S S U M E L I A B I L I T Y F O R I N T E L L E C T U A L P R O P E RT Y INFRINGEMENT RELATED IN ANY MANNER TO USE OF INFORMATION,DEVICES, OR TECHNOLOGY DESCRIBED HEREIN OR OTHERWISE. The information contained within this document has been verified according to the general principles of electrical and mechanical engineering.eZ80Acclaim! is a registered trademark of Zilog, Inc. All other product or service names are the property of their respective owners.Warning:。
★Keil编译时出现错误和警告的总结

★Keil编译时出现错误和警告的总结Keil 编译时出现错误和警告的总结和C 编译器错误信息中文翻译(1)L15 重复调用***WARNING L15: MULTIPLE CALL TO SEGMENTSEGMENT: ?PR?SPI_RECEIVE_WORD?D_SPICALLER1: ?PR?VSYNC_INTERRUPT?MAINCALLER2: ?C_C51STARTUP该警告表示连接器发现有一个函数可能会被主函数和一个中断服务程序(或者调用中断服务程序的函数)同时调用,或者同时被多个中断服务程序调用。
出现这种问题的原因之一是这个函数是不可重入性函数,当该函数运行时它可能会被一个中断打断,从而使得结果发生变化并可能会引起一些变量形式的冲突(即引起函数内一些数据的丢失,可重入性函数在任何时候都可以被ISR 打断,一段时间后又可以运行,但是相应数据不会丢失)。
原因之二是用于局部变量和变量(暂且这样翻译,arguments,[自变量,变元一数值,用于确定程序或子程序的值])的内存区被其他函数的内存区所覆盖,如果该函数被中断,则它的内存区就会被使用,这将导致其他函数的内存冲突。
例如,第一个警告中函数WRITE_GMVLX1_REG 在D_GMVLX1.C 或者D_GMVLX1.A51 被定义,它被一个中断服务程序或者一个调用了中断服务程序的函数调用了,调用它的函数是VSYNC_INTERRUPT,在MAIN.C 中。
解决方法:如果你确定两个函数决不会在同一时间执行(该函数被主程序调用并且中断被禁止),并且该函数不占用内存(假设只使用寄存器),则你可以完全忽略这种警告。
如果该函数占用了内存,则应该使用连接器(linker)OVERLAY 指令将函数从覆盖分析(overlayanalysis)中除去,例如:OVERLAY (?PR?_WRITE_GMVLX1_REG?D_GMVLX1 ! *)上面的指令防止了该函数使用的内存区被其他函数覆盖。
LEC系列电动执行器控制器简易操作手册

LEC系列电缸简易操作手册LEC系列控制器为SMC开发的新型电缸控制器。
适用范围:LES系列电动滑台LEY系列出杆式电缸LEF系列无杆式电缸LEH系列电动夹爪1、产品特点:①内部可存储64步程序②可实现精确定位、力矩输出2、系统构成(以LES系列电动滑台+LEC系列控制器为例)3、产品结构4、各端口配线及功能详解4-1 CN1端口-DC24V 电源接口急停信号配线(注意:常闭信号,闭合时正常使用,断开时急停)解锁信号配线(注意:闭合时解锁,断开时锁紧,适用于带锁型电缸)4-2 CN2端口-电机电源接口/CN3端口-电机编码器接口/CN4端口-通信线缆接口 以上3个端口均为标准插头,直接插入端口即可。
端子号 功能 0V 电源- M 24V 电机电源+ C 24V 控制端口电源+ EMG 急停信号+ BK RLS 解锁信号+4-3 CN5端口-控制I/O 接口 CN5端口用标准线缆示意图:配线图(以NPN 型为例)注意:上表中粗体红字部分的线为必接线,否则电缸无法正常使用。
其余线缆可根据实际需要选接。
线号线色 名称 说明A1 茶/黑1 COM+控制端口DC24V 正 A2 茶/红1COM-控制端口DC24V 负A3 黄/黑1 IN0 A4 黄/红1 IN1 A5 浅绿/黑1 IN2 A6 浅绿/红1 IN3 A7 灰/黑1 IN4 A8 灰/红1 IN5 步选择信号(2进制)。
A9 白/黑1 SETUP 原点回归 A10白/红1 HOLD 暂时停止(可继续)A11 茶/黑2 DRIVE 运行 A12茶/红2 RESET 报警取消 A13黄/黑2 SVON 伺服ON线号线色名称说明B1 黄/红2 OUT0 B2 浅绿/黑2 OUT1 B3 浅绿/红2 OUT2B4 灰/黑2 OUT3 B5 灰/红2 OUT4 B6 白/黑2 OUT5 步选择输出信号 (2进制) B7 白/红2 BUSY 运行中 B8 茶/黑3 AREA 区域内 B9 茶/红3 SETON 原点回归完成 B10 黄/黑3 INP公差内B11 黄/红3 SVRE 伺服准备完成 B12 浅绿/黑3 *ESTOP 急停中 B13浅绿/红3 *ALARM 报警输入信号: 输出信号:A1 COM+ DC24V 正 DC24V 正 A2 COM- DC24V 负 DC24V 负 A3 IN0 A4 IN1A5 IN2A6 IN3A7 IN4 A8 IN5步选择信号2进制组合选定要执行的程序步号,OFF 表示0,ON 表示1。
Indradrive 系列 故障代码

Error MessagesF9001 Error internal function call.F9002 Error internal RTOS function callF9003 WatchdogF9004 Hardware trapF8000 Fatal hardware errorF8010 Autom. commutation: Max. motion range when moving back F8011 Commutation offset could not be determinedF8012 Autom. commutation: Max. motion rangeF8013 Automatic commutation: Current too lowF8014 Automatic commutation: OvercurrentF8015 Automatic commutation: TimeoutF8016 Automatic commutation: Iteration without resultF8017 Automatic commutation: Incorrect commutation adjustment F8018 Device overtemperature shutdownF8022 Enc. 1: Enc. signals incorr. (can be cleared in ph. 2) F8023 Error mechanical link of encoder or motor connectionF8025 Overvoltage in power sectionF8027 Safe torque off while drive enabledF8028 Overcurrent in power sectionF8030 Safe stop 1 while drive enabledF8042 Encoder 2 error: Signal amplitude incorrectF8057 Device overload shutdownF8060 Overcurrent in power sectionF8064 Interruption of motor phaseF8067 Synchronization PWM-Timer wrongF8069 +/-15Volt DC errorF8070 +24Volt DC errorF8076 Error in error angle loopF8078 Speed loop error.F8079 Velocity limit value exceededF8091 Power section defectiveF8100 Error when initializing the parameter handlingF8102 Error when initializing power sectionF8118 Invalid power section/firmware combinationF8120 Invalid control section/firmware combinationF8122 Control section defectiveF8129 Incorrect optional module firmwareF8130 Firmware of option 2 of safety technology defectiveF8133 Error when checking interrupting circuitsF8134 SBS: Fatal errorF8135 SMD: Velocity exceededF8140 Fatal CCD error.F8201 Safety command for basic initialization incorrectF8203 Safety technology configuration parameter invalidF8813 Connection error mains chokeF8830 Power section errorF8838 Overcurrent external braking resistorF7010 Safely-limited increment exceededF7011 Safely-monitored position, exceeded in pos. DirectionF7012 Safely-monitored position, exceeded in neg. DirectionF7013 Safely-limited speed exceededF7020 Safe maximum speed exceededF7021 Safely-limited position exceededF7030 Position window Safe stop 2 exceededF7031 Incorrect direction of motionF7040 Validation error parameterized - effective thresholdF7041 Actual position value validation errorF7042 Validation error of safe operation modeF7043 Error of output stage interlockF7050 Time for stopping process exceeded8.3.15 F7051 Safely-monitored deceleration exceeded (159)8.4 Travel Range Errors (F6xxx) (161)8.4.1 Behavior in the Case of Travel Range Errors (161)8.4.2 F6010 PLC Runtime Error (162)8.4.3 F6024 Maximum braking time exceeded (163)8.4.4 F6028 Position limit value exceeded (overflow) (164)8.4.5 F6029 Positive position limit exceeded (164)8.4.6 F6030 Negative position limit exceeded (165)8.4.7 F6034 Emergency-Stop (166)8.4.8 F6042 Both travel range limit switches activated (167)8.4.9 F6043 Positive travel range limit switch activated (167)8.4.10 F6044 Negative travel range limit switch activated (168)8.4.11 F6140 CCD slave error (emergency halt) (169)8.5 Interface Errors (F4xxx) (169)8.5.1 Behavior in the Case of Interface Errors (169)8.5.2 F4001 Sync telegram failure (170)8.5.3 F4002 RTD telegram failure (171)8.5.4 F4003 Invalid communication phase shutdown (172)8.5.5 F4004 Error during phase progression (172)8.5.6 F4005 Error during phase regression (173)8.5.7 F4006 Phase switching without ready signal (173)8.5.8 F4009 Bus failure (173)8.5.9 F4012 Incorrect I/O length (175)8.5.10 F4016 PLC double real-time channel failure (176)8.5.11 F4017 S-III: Incorrect sequence during phase switch (176)8.5.12 F4034 Emergency-Stop (177)8.5.13 F4140 CCD communication error (178)8.6 Non-Fatal Safety Technology Errors (F3xxx) (178)8.6.1 Behavior in the Case of Non-Fatal Safety Technology Errors (178)8.6.2 F3111 Refer. missing when selecting safety related end pos (179)8.6.3 F3112 Safe reference missing (179)8.6.4 F3115 Brake check time interval exceeded (181)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand ControlsI Bosch Rexroth AG VII/XXIITable of ContentsPage8.6.5 F3116 Nominal load torque of holding system exceeded (182)8.6.6 F3117 Actual position values validation error (182)8.6.7 F3122 SBS: System error (183)8.6.8 F3123 SBS: Brake check missing (184)8.6.9 F3130 Error when checking input signals (185)8.6.10 F3131 Error when checking acknowledgment signal (185)8.6.11 F3132 Error when checking diagnostic output signal (186)8.6.12 F3133 Error when checking interrupting circuits (187)8.6.13 F3134 Dynamization time interval incorrect (188)8.6.14 F3135 Dynamization pulse width incorrect (189)8.6.15 F3140 Safety parameters validation error (192)8.6.16 F3141 Selection validation error (192)8.6.17 F3142 Activation time of enabling control exceeded (193)8.6.18 F3143 Safety command for clearing errors incorrect (194)8.6.19 F3144 Incorrect safety configuration (195)8.6.20 F3145 Error when unlocking the safety door (196)8.6.21 F3146 System error channel 2 (197)8.6.22 F3147 System error channel 1 (198)8.6.23 F3150 Safety command for system start incorrect (199)8.6.24 F3151 Safety command for system halt incorrect (200)8.6.25 F3152 Incorrect backup of safety technology data (201)8.6.26 F3160 Communication error of safe communication (202)8.7 Non-Fatal Errors (F2xxx) (202)8.7.1 Behavior in the Case of Non-Fatal Errors (202)8.7.2 F2002 Encoder assignment not allowed for synchronization (203)8.7.3 F2003 Motion step skipped (203)8.7.4 F2004 Error in MotionProfile (204)8.7.5 F2005 Cam table invalid (205)8.7.6 F2006 MMC was removed (206)8.7.7 F2007 Switching to non-initialized operation mode (206)8.7.8 F2008 RL The motor type has changed (207)8.7.9 F2009 PL Load parameter default values (208)8.7.10 F2010 Error when initializing digital I/O (-> S-0-0423) (209)8.7.11 F2011 PLC - Error no. 1 (210)8.7.12 F2012 PLC - Error no. 2 (210)8.7.13 F2013 PLC - Error no. 3 (211)8.7.14 F2014 PLC - Error no. 4 (211)8.7.15 F2018 Device overtemperature shutdown (211)8.7.16 F2019 Motor overtemperature shutdown (212)8.7.17 F2021 Motor temperature monitor defective (213)8.7.18 F2022 Device temperature monitor defective (214)8.7.19 F2025 Drive not ready for control (214)8.7.20 F2026 Undervoltage in power section (215)8.7.21 F2027 Excessive oscillation in DC bus (216)8.7.22 F2028 Excessive deviation (216)8.7.23 F2031 Encoder 1 error: Signal amplitude incorrect (217)VIII/XXII Bosch Rexroth AG | Electric Drivesand ControlsRexroth IndraDrive | Troubleshooting GuideTable of ContentsPage8.7.24 F2032 Validation error during commutation fine adjustment (217)8.7.25 F2033 External power supply X10 error (218)8.7.26 F2036 Excessive position feedback difference (219)8.7.27 F2037 Excessive position command difference (220)8.7.28 F2039 Maximum acceleration exceeded (220)8.7.29 F2040 Device overtemperature 2 shutdown (221)8.7.30 F2042 Encoder 2: Encoder signals incorrect (222)8.7.31 F2043 Measuring encoder: Encoder signals incorrect (222)8.7.32 F2044 External power supply X15 error (223)8.7.33 F2048 Low battery voltage (224)8.7.34 F2050 Overflow of target position preset memory (225)8.7.35 F2051 No sequential block in target position preset memory (225)8.7.36 F2053 Incr. encoder emulator: Pulse frequency too high (226)8.7.37 F2054 Incr. encoder emulator: Hardware error (226)8.7.38 F2055 External power supply dig. I/O error (227)8.7.39 F2057 Target position out of travel range (227)8.7.40 F2058 Internal overflow by positioning input (228)8.7.41 F2059 Incorrect command value direction when positioning (229)8.7.42 F2063 Internal overflow master axis generator (230)8.7.43 F2064 Incorrect cmd value direction master axis generator (230)8.7.44 F2067 Synchronization to master communication incorrect (231)8.7.45 F2068 Brake error (231)8.7.46 F2069 Error when releasing the motor holding brake (232)8.7.47 F2074 Actual pos. value 1 outside absolute encoder window (232)8.7.48 F2075 Actual pos. value 2 outside absolute encoder window (233)8.7.49 F2076 Actual pos. value 3 outside absolute encoder window (234)8.7.50 F2077 Current measurement trim wrong (235)8.7.51 F2086 Error supply module (236)8.7.52 F2087 Module group communication error (236)8.7.53 F2100 Incorrect access to command value memory (237)8.7.54 F2101 It was impossible to address MMC (237)8.7.55 F2102 It was impossible to address I2C memory (238)8.7.56 F2103 It was impossible to address EnDat memory (238)8.7.57 F2104 Commutation offset invalid (239)8.7.58 F2105 It was impossible to address Hiperface memory (239)8.7.59 F2110 Error in non-cyclical data communic. of power section (240)8.7.60 F2120 MMC: Defective or missing, replace (240)8.7.61 F2121 MMC: Incorrect data or file, create correctly (241)8.7.62 F2122 MMC: Incorrect IBF file, correct it (241)8.7.63 F2123 Retain data backup impossible (242)8.7.64 F2124 MMC: Saving too slowly, replace (243)8.7.65 F2130 Error comfort control panel (243)8.7.66 F2140 CCD slave error (243)8.7.67 F2150 MLD motion function block error (244)8.7.68 F2174 Loss of motor encoder reference (244)8.7.69 F2175 Loss of optional encoder reference (245)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand Controls| Bosch Rexroth AG IX/XXIITable of ContentsPage8.7.70 F2176 Loss of measuring encoder reference (246)8.7.71 F2177 Modulo limitation error of motor encoder (246)8.7.72 F2178 Modulo limitation error of optional encoder (247)8.7.73 F2179 Modulo limitation error of measuring encoder (247)8.7.74 F2190 Incorrect Ethernet configuration (248)8.7.75 F2260 Command current limit shutoff (249)8.7.76 F2270 Analog input 1 or 2, wire break (249)8.7.77 F2802 PLL is not synchronized (250)8.7.78 F2814 Undervoltage in mains (250)8.7.79 F2815 Overvoltage in mains (251)8.7.80 F2816 Softstart fault power supply unit (251)8.7.81 F2817 Overvoltage in power section (251)8.7.82 F2818 Phase failure (252)8.7.83 F2819 Mains failure (253)8.7.84 F2820 Braking resistor overload (253)8.7.85 F2821 Error in control of braking resistor (254)8.7.86 F2825 Switch-on threshold braking resistor too low (255)8.7.87 F2833 Ground fault in motor line (255)8.7.88 F2834 Contactor control error (256)8.7.89 F2835 Mains contactor wiring error (256)8.7.90 F2836 DC bus balancing monitor error (257)8.7.91 F2837 Contactor monitoring error (257)8.7.92 F2840 Error supply shutdown (257)8.7.93 F2860 Overcurrent in mains-side power section (258)8.7.94 F2890 Invalid device code (259)8.7.95 F2891 Incorrect interrupt timing (259)8.7.96 F2892 Hardware variant not supported (259)8.8 SERCOS Error Codes / Error Messages of Serial Communication (259)9 Warnings (Exxxx) (263)9.1 Fatal Warnings (E8xxx) (263)9.1.1 Behavior in the Case of Fatal Warnings (263)9.1.2 E8025 Overvoltage in power section (263)9.1.3 E8026 Undervoltage in power section (264)9.1.4 E8027 Safe torque off while drive enabled (265)9.1.5 E8028 Overcurrent in power section (265)9.1.6 E8029 Positive position limit exceeded (266)9.1.7 E8030 Negative position limit exceeded (267)9.1.8 E8034 Emergency-Stop (268)9.1.9 E8040 Torque/force actual value limit active (268)9.1.10 E8041 Current limit active (269)9.1.11 E8042 Both travel range limit switches activated (269)9.1.12 E8043 Positive travel range limit switch activated (270)9.1.13 E8044 Negative travel range limit switch activated (271)9.1.14 E8055 Motor overload, current limit active (271)9.1.15 E8057 Device overload, current limit active (272)X/XXII Bosch Rexroth AG | Electric Drivesand ControlsRexroth IndraDrive | Troubleshooting GuideTable of ContentsPage9.1.16 E8058 Drive system not ready for operation (273)9.1.17 E8260 Torque/force command value limit active (273)9.1.18 E8802 PLL is not synchronized (274)9.1.19 E8814 Undervoltage in mains (275)9.1.20 E8815 Overvoltage in mains (275)9.1.21 E8818 Phase failure (276)9.1.22 E8819 Mains failure (276)9.2 Warnings of Category E4xxx (277)9.2.1 E4001 Double MST failure shutdown (277)9.2.2 E4002 Double MDT failure shutdown (278)9.2.3 E4005 No command value input via master communication (279)9.2.4 E4007 SERCOS III: Consumer connection failed (280)9.2.5 E4008 Invalid addressing command value data container A (280)9.2.6 E4009 Invalid addressing actual value data container A (281)9.2.7 E4010 Slave not scanned or address 0 (281)9.2.8 E4012 Maximum number of CCD slaves exceeded (282)9.2.9 E4013 Incorrect CCD addressing (282)9.2.10 E4014 Incorrect phase switch of CCD slaves (283)9.3 Possible Warnings When Operating Safety Technology (E3xxx) (283)9.3.1 Behavior in Case a Safety Technology Warning Occurs (283)9.3.2 E3100 Error when checking input signals (284)9.3.3 E3101 Error when checking acknowledgment signal (284)9.3.4 E3102 Actual position values validation error (285)9.3.5 E3103 Dynamization failed (285)9.3.6 E3104 Safety parameters validation error (286)9.3.7 E3105 Validation error of safe operation mode (286)9.3.8 E3106 System error safety technology (287)9.3.9 E3107 Safe reference missing (287)9.3.10 E3108 Safely-monitored deceleration exceeded (288)9.3.11 E3110 Time interval of forced dynamization exceeded (289)9.3.12 E3115 Prewarning, end of brake check time interval (289)9.3.13 E3116 Nominal load torque of holding system reached (290)9.4 Non-Fatal Warnings (E2xxx) (290)9.4.1 Behavior in Case a Non-Fatal Warning Occurs (290)9.4.2 E2010 Position control with encoder 2 not possible (291)9.4.3 E2011 PLC - Warning no. 1 (291)9.4.4 E2012 PLC - Warning no. 2 (291)9.4.5 E2013 PLC - Warning no. 3 (292)9.4.6 E2014 PLC - Warning no. 4 (292)9.4.7 E2021 Motor temperature outside of measuring range (292)9.4.8 E2026 Undervoltage in power section (293)9.4.9 E2040 Device overtemperature 2 prewarning (294)9.4.10 E2047 Interpolation velocity = 0 (294)9.4.11 E2048 Interpolation acceleration = 0 (295)9.4.12 E2049 Positioning velocity >= limit value (296)9.4.13 E2050 Device overtemp. Prewarning (297)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand Controls| Bosch Rexroth AG XI/XXIITable of ContentsPage9.4.14 E2051 Motor overtemp. prewarning (298)9.4.15 E2053 Target position out of travel range (298)9.4.16 E2054 Not homed (300)9.4.17 E2055 Feedrate override S-0-0108 = 0 (300)9.4.18 E2056 Torque limit = 0 (301)9.4.19 E2058 Selected positioning block has not been programmed (302)9.4.20 E2059 Velocity command value limit active (302)9.4.21 E2061 Device overload prewarning (303)9.4.22 E2063 Velocity command value > limit value (304)9.4.23 E2064 Target position out of num. range (304)9.4.24 E2069 Holding brake torque too low (305)9.4.25 E2070 Acceleration limit active (306)9.4.26 E2074 Encoder 1: Encoder signals disturbed (306)9.4.27 E2075 Encoder 2: Encoder signals disturbed (307)9.4.28 E2076 Measuring encoder: Encoder signals disturbed (308)9.4.29 E2077 Absolute encoder monitoring, motor encoder (encoder alarm) (308)9.4.30 E2078 Absolute encoder monitoring, opt. encoder (encoder alarm) (309)9.4.31 E2079 Absolute enc. monitoring, measuring encoder (encoder alarm) (309)9.4.32 E2086 Prewarning supply module overload (310)9.4.33 E2092 Internal synchronization defective (310)9.4.34 E2100 Positioning velocity of master axis generator too high (311)9.4.35 E2101 Acceleration of master axis generator is zero (312)9.4.36 E2140 CCD error at node (312)9.4.37 E2270 Analog input 1 or 2, wire break (312)9.4.38 E2802 HW control of braking resistor (313)9.4.39 E2810 Drive system not ready for operation (314)9.4.40 E2814 Undervoltage in mains (314)9.4.41 E2816 Undervoltage in power section (314)9.4.42 E2818 Phase failure (315)9.4.43 E2819 Mains failure (315)9.4.44 E2820 Braking resistor overload prewarning (316)9.4.45 E2829 Not ready for power on (316)。
威纶通内部寄存器说明

LB-9000 : 重新开机时状态为 ONLB-9001 : 重新开机时状态为 ONLB-9002 : 重新开机时状态为 ONLB-9003 : 重新开机时状态为 ONLB-9004 : 重新开机时状态为 ONLB-9005 : 重新开机时状态为 ONLB-9006 : 重新开机时状态为 ONLB-9007 : 重新开机时状态为 ONLB-9008 : 重新开机时状态为 ONLB-9009 : 重新开机时状态为 ONLB-9010 : 资料下载指示LB-9011 : 资料上传指示LB-9012 : 资料下载/上传指示LB-9013 : 隐藏 (设 ON)/显示 (设 OFF) 快选窗口LB-9014 : 隐藏 (设 ON)/显示 (设 OFF) 快选按键LB-9015 : 隐藏 (设 ON)/显示 (设 OFF) 快选窗口/按键LB-9016 : 远程 HMI 连接至本机 HMI (当状态为 ON)LB-9017 : 取消 PLC 控制元件[切换窗口]的[写回]功能LB-9018 : 隐藏 (设 ON)/显示 (设 OFF) 鼠标光标LB-9019 : 取消 (设 ON)/开启 (设 OFF) 声音输出LB-9020 : 显示 (设 ON)/隐藏 (设 OFF) 系统设置列LB-9021 : 重置当前的事件记录 (OFF->ON)LB-9022 : 删除 HMI 内存里日期最早的事件记录文件 (设置为 ON)LB-9023 : 删除 HMI 内存里全部事件记录文件 (设置为 ON)LB-9024 : 更新 HMI 内存里事件记录统计信息 (设置为 ON)LB-9025 : 删除 HMI 内存里日期最早的资料取样文件 (设置为 ON)LB-9026 : 删除 HMI 内存里全部资料取样文件 (设置为 ON)LB-9027 : 更新 HMI 内存里资料取样统计信息 (设置为 ON)LB-9028 : 重置配方资料 (设置为 ON)LB-9029 : 保存配方资料到触摸屏 (设置为 ON)LB-9030 : 更新 COM 1 通讯参数 (设置为 ON)LB-9031 : 更新 COM 2 通讯参数 (设置为 ON)LB-9032 : 更新 COM 3 通讯参数 (设置为 ON)LB-9033 : 取消 (设 ON)/开启 (设 OFF) HMI 上传功能LB-9034 : 保存事件记录与取样数据至 HMI, U盘, SD 卡 (设置为 ON) LB-9035 : HMI 剩余空间不足警示 (当状态为 ON)LB-9036 : SD 卡剩余空间不足警示 (当状态为 ON)LB-9037 : U盘剩余空间不足警示 (当状态为 ON)LB-9039 : 文件备份动作状态 (备份中状态为 ON)LB-9040 : 背光灯调亮 (设置为 ON)LB-9041 : 背光灯调暗 (设置为 ON)LB-9042 : 确认全部事件记录 (设置为 ON)LB-9043 : 存在未确认的事件记录 (当状态为 ON)LB-9044 : 禁止远端控制 (当状态为 ON)LB-9045 : memory-map 通讯失败 (当状态为 ON)LB-9046 : 工程文件识别码与 HMI 识别码不同 (当状态为 ON)LB-9047 : 重新启动 HMI (设置为 ON, 并当 LB-9048 状态为 ON 时)LB-9048 : 重启机制保护LB-9050 : 用户注销LB-9051 : 与 EasyAccess 服务器断线 (设 OFF)/连线 (设 ON)LB-9052 : 与 EasyAccess 服务器连线状态 (当连线中状态为 ON)LB-9053 : 禁止远端读取密码操作 (当状态为 ON)LB-9054 : 禁止远端写入密码操作 (当状态为 ON)LB-9055 : MODBUS server (COM 1) 接收到合法的命令 (当状态为 ON) LB-9056 : MODBUS server (COM 2) 接收到合法的命令 (当状态为 ON) LB-9057 : MODBUS server (COM 3) 接收到合法的命令 (当状态为 ON)LB-9058 : MODBUS server (以太网) 接收到合法的命令 (当状态为 ON)LB-9059 : 关闭宏指令 TRACE 功能 (当状态为 ON)LB-9060 : 密码输入错误指示LB-9061 : 更新密码 (设置为 ON)LB-9062 : 开启硬件设置窗口 (设置为 ON)LB-9063 : 隐藏 (设 ON)/显示 (设 OFF) 当插上U盘时弹出下载窗口LB-9064 : 启用 USB 条码扫瞄器装置 (键盘功能关闭) (当状态为 ON)LB-9065 : 停用/启用 COM 1 广播站号LB-9066 : 停用/启用 COM 2 广播站号LB-9067 : 停用/启用 COM 3 广播站号LB-9068 : 自动连接远端 HMI 1 (当状态为 ON)LB-9069 : 自动连接远端 HMI 2 (当状态为 ON)LB-9070 : 自动连接远端 HMI 3 (当状态为 ON)LB-9071 : 自动连接远端 HMI 4 (当状态为 ON)LB-9072 : 自动连接远端 HMI 5 (当状态为 ON)LB-9073 : 自动连接远端 HMI 6 (当状态为 ON)LB-9074 : 自动连接远端 HMI 7 (当状态为 ON)LB-9075 : 自动连接远端 HMI 8 (当状态为 ON)LB-9099 : 自动连接远端 HMI 32 (当状态为 ON)LB-9100 : 与远端触摸屏 1 的通讯状态, 设 ON 重连一次LB-9101 : 与远端触摸屏 2 的通讯状态, 设 ON 重连一次LB-9102 : 与远端触摸屏 3 的通讯状态, 设 ON 重连一次LB-9103 : 与远端触摸屏 4 的通讯状态, 设 ON 重连一次LB-9104 : 与远端触摸屏 5 的通讯状态, 设 ON 重连一次LB-9105 : 与远端触摸屏 6 的通讯状态, 设 ON 重连一次LB-9106 : 与远端触摸屏 7 的通讯状态, 设 ON 重连一次LB-9107 : 与远端触摸屏 8 的通讯状态, 设 ON 重连一次LB-9148 : 与远端触摸屏 49 的通讯状态, 设 ON 重连一次LB-9149 : 当在线更改远端 HMI 的 IP 时, 设 ON 重新连结远端 HMILB-9150 : 自动连接 PLC 1 (COM 1) (当状态为 ON)LB-9151 : 自动连接 PLC 2 (COM 2) (当状态为 ON)LB-9152 : 自动连接 PLC 3 (COM 3) (当状态为 ON)LB-9153 : 自动连接 PLC 4 (以太网) (当状态为 ON)LB-9154 : 自动连接 PLC 5 (以太网) (当状态为 ON)LB-9155 : 自动连接 PLC 6 (以太网) (当状态为 ON)LB-9156 : 自动连接 PLC 7 (以太网) (当状态为 ON)LB-9157 : 自动连接 PLC 8 (以太网) (当状态为 ON)LB-9158 : 自动连接 PLC 9 (以太网) (当状态为 ON)LB-9189 : 自动连接 PLC 40 (以太网) (当状态为 ON)LB-9190 : 自动连接 PLC (USB) (当状态为 ON)LB-9191 : 与 PLC 的通讯状态 (USB), 设 ON 重连一次LB-9192 : 禁止弹出 PLC (USB) 的 "PLC No Response" 窗口 (当状态为 ON) LB-9196 : 本机 HMI 只支持检视功能 (当状态为 ON)LB-9197 : 只允许远端 HMI 使用检视功能 (当状态为 ON)LB-9198 : 禁止本机 HMI 触发宏指令 (当状态为 ON)LB-9199 : 禁止远端 HMI 触发宏指令 (当状态为 ON)LB-9200 : 与 PLC 1 的通讯状态 (站号 0, COM 1), 设 ON 重连一次LB-9201 : 与 PLC 1 的通讯状态 (站号 1, COM 1), 设 ON 重连一次LB-9202 : 与 PLC 1 的通讯状态 (站号 2, COM 1), 设 ON 重连一次LB-9203 : 与 PLC 1 的通讯状态 (站号 3, COM 1), 设 ON 重连一次LB-9204 : 与 PLC 1 的通讯状态 (站号 4, COM 1), 设 ON 重连一次LB-9205 : 与 PLC 1 的通讯状态 (站号 5, COM 1), 设 ON 重连一次LB-9206 : 与 PLC 1 的通讯状态 (站号 6, COM 1), 设 ON 重连一次LB-9207 : 与 PLC 1 的通讯状态 (站号 7, COM 1), 设 ON 重连一次LB-9455 : 与 PLC 1 的通讯状态 (站号 255, COM 1), 设 ON 重连一次LB-9460 : EM0 的保存设备 (SD 卡) 不存在 (当状态为 ON)LB-9461 : EM1 的保存设备 (SD 卡) 不存在 (当状态为 ON)LB-9462 : EM2 的保存设备 (SD 卡) 不存在 (当状态为 ON)LB-9463 : EM3 的保存设备 (SD 卡) 不存在 (当状态为 ON)LB-9464 : EM4 的保存设备 (SD 卡) 不存在 (当状态为 ON)LB-9465 : EM5 的保存设备 (SD 卡) 不存在 (当状态为 ON)LB-9466 : EM6 的保存设备 (SD 卡) 不存在 (当状态为 ON)LB-9467 : EM7 的保存设备 (SD 卡) 不存在 (当状态为 ON)LB-9468 : EM8 的保存设备 (SD 卡) 不存在 (当状态为 ON)LB-9469 : EM9 的保存设备 (SD 卡) 不存在 (当状态为 ON)LB-9470 : EM0 的保存设备 (U盘) 不存在 (当状态为 ON)LB-9471 : EM1 的保存设备 (U盘) 不存在 (当状态为 ON)LB-9472 : EM2 的保存设备 (U盘) 不存在 (当状态为 ON)LB-9473 : EM3 的保存设备 (U盘) 不存在 (当状态为 ON)LB-9474 : EM4 的保存设备 (U盘) 不存在 (当状态为 ON)LB-9475 : EM5 的保存设备 (U盘) 不存在 (当状态为 ON)LB-9476 : EM6 的保存设备 (U盘) 不存在 (当状态为 ON)LB-9477 : EM7 的保存设备 (U盘) 不存在 (当状态为 ON)LB-9478 : EM8 的保存设备 (U盘) 不存在 (当状态为 ON)LB-9479 : EM9 的保存设备 (U盘) 不存在 (当状态为 ON)LB-9500 : 与 PLC 2 的通讯状态 (站号 0, COM 2), 设 ON 重连一次LB-9501 : 与 PLC 2 的通讯状态 (站号 1, COM 2), 设 ON 重连一次LB-9502 : 与 PLC 2 的通讯状态 (站号 2, COM 2), 设 ON 重连一次LB-9503 : 与 PLC 2 的通讯状态 (站号 3, COM 2), 设 ON 重连一次LB-9504 : 与 PLC 2 的通讯状态 (站号 4, COM 2), 设 ON 重连一次LB-9505 : 与 PLC 2 的通讯状态 (站号 5, COM 2), 设 ON 重连一次LB-9506 : 与 PLC 2 的通讯状态 (站号 6, COM 2), 设 ON 重连一次LB-9507 : 与 PLC 2 的通讯状态 (站号 7, COM 2), 设 ON 重连一次LB-9755 : 与 PLC 2 的通讯状态 (站号 255, COM 2), 设 ON 重连一次LB-9800 : 与 PLC 3 的通讯状态 (站号 0, COM 3), 设 ON 重连一次LB-9801 : 与 PLC 3 的通讯状态 (站号 1, COM 3), 设 ON 重连一次LB-9802 : 与 PLC 3 的通讯状态 (站号 2, COM 3), 设 ON 重连一次LB-9803 : 与 PLC 3 的通讯状态 (站号 3, COM 3), 设 ON 重连一次LB-9804 : 与 PLC 3 的通讯状态 (站号 4, COM 3), 设 ON 重连一次LB-9805 : 与 PLC 3 的通讯状态 (站号 5, COM 3), 设 ON 重连一次LB-9806 : 与 PLC 3 的通讯状态 (站号 6, COM 3), 设 ON 重连一次LB-9807 : 与 PLC 3 的通讯状态 (站号 7, COM 3), 设 ON 重连一次LB-10055 : 与 PLC 3 的通讯状态 (站号 255, COM 3), 设 ON 重连一次LB-10069 : 当在线更改远端打印/备份服务器的 IP 时, 设 ON 重新连结远端打印/备份服务器LB-10070 : 当在线更改 PLC 4 (以太网) 的 IP 或系统参数时, 设 ON 重新连结 PLCLB-10071 : 当在线更改 PLC 5 (以太网) 的 IP 或系统参数时, 设 ON 重新连结 PLCLB-10072 : 当在线更改 PLC 6 (以太网) 的 IP 或系统参数时, 设 ON 重新连结 PLCLB-10073 : 当在线更改 PLC 7 (以太网) 的 IP 或系统参数时, 设 ON 重新连结 PLCLB-10074 : 当在线更改 PLC 8 (以太网) 的 IP 或系统参数时, 设 ON 重新连结 PLCLB-10075 : 当在线更改 PLC 9 (以太网) 的 IP 或系统参数时, 设 ON 重新连结 PLCLB-10099 : 当在线更改 PLC 33 (以太网) 的 IP 或系统参数时, 设 ON 重新连结 PLCLB-10100 : 与 PLC 4 的通讯状态 (以太网), 设 ON 重连一次LB-10400 : 与 PLC 5 的通讯状态 (以太网), 设 ON 重连一次LB-10700 : 与 PLC 6 的通讯状态 (以太网), 设 ON 重连一次LB-11000 : 与 PLC 7 的通讯状态 (以太网), 设 ON 重连一次LB-11300 : 与 PLC 8 的通讯状态 (以太网), 设 ON 重连一次LB-11600 : 与 PLC 9 的通讯状态 (以太网), 设 ON 重连一次LB-11900 : 与 PLC 10 的通讯状态 (以太网), 设 ON 重连一次LB-11901 : 与 PLC 11 的通讯状态 (以太网), 设 ON 重连一次LB-11902 : 与 PLC 12 的通讯状态 (以太网), 设 ON 重连一次LB-11903 : 与 PLC 13 的通讯状态 (以太网), 设 ON 重连一次LB-11904 : 与 PLC 14 的通讯状态 (以太网), 设 ON 重连一次LB-11905 : 与 PLC 15 的通讯状态 (以太网), 设 ON 重连一次LB-11906 : 与 PLC 16 的通讯状态 (以太网), 设 ON 重连一次LB-11939 : 与 PLC 49 的通讯状态 (以太网), 设 ON 重连一次LB-11940 : 删除 SD 卡里日期最早的事件记录文件 (设置为 ON)LB-11941 : 删除 SD 卡里全部事件记录文件 (设置为 ON)LB-11942 : 更新 SD 卡里事件记录统计信息 (设置为 ON)LB-11943 : 删除 U盘里日期最早的事件记录文件 (设置为 ON)LB-11944 : 删除 U盘里全部事件记录文件 (设置为 ON)LB-11945 : 更新 U盘里事件记录统计信息 (设置为 ON)LB-11949 : 删除 SD 卡里日期最早的资料取样文件 (设置为 ON)LB-11950 : 删除 SD 卡里全部资料取样文件 (设置为 ON)LB-11951 : 更新 SD 卡里资料取样统计信息 (设置为 ON)LB-11952 : 删除 U盘里日期最早的资料取样文件 (设置为 ON)LB-11953 : 删除 U盘里全部资料取样文件 (设置为 ON)LB-11954 : 更新 U盘里资料取样统计信息 (设置为 ON)LB-11958 : 时间设置错误 (当状态为 ON)LB-11959 : LED 指示灯控制LB-11960 : 禁止弹出 PLC 1 的 "PLC No Response" 窗口 (当状态为 ON)LB-11961 : 禁止弹出 PLC 2 的 "PLC No Response" 窗口 (当状态为 ON)LB-11962 : 禁止弹出 PLC 3 的 "PLC No Response" 窗口 (当状态为 ON)LB-11963 : 禁止弹出 PLC 4 的 "PLC No Response" 窗口 (当状态为 ON)LB-11964 : 禁止弹出 PLC 5 的 "PLC No Response" 窗口 (当状态为 ON)LB-11965 : 禁止弹出 PLC 6 的 "PLC No Response" 窗口 (当状态为 ON)LB-11966 : 禁止弹出 PLC 7 的 "PLC No Response" 窗口 (当状态为 ON)LB-11967 : 禁止弹出 PLC 8 的 "PLC No Response" 窗口 (当状态为 ON)LB-12023 : 禁止弹出 PLC 64 的 "PLC No Response" 窗口 (当状态为 ON)LB-12030 : COM 1 开启状态指示 (OFF : 正常, ON : 开启失败)LB-12031 : COM 2 开启状态指示 (OFF : 正常, ON : 开启失败)LB-12032 : COM 3 开启状态指示 (OFF : 正常, ON : 开启失败)LB-12033 : COM 4 开启状态指示 (OFF : 正常, ON : 开启失败)LB-12034 : COM 5 开启状态指示 (OFF : 正常, ON : 开启失败)LB-12035 : COM 6 开启状态指示 (OFF : 正常, ON : 开启失败)LB-12036 : COM 7 开启状态指示 (OFF : 正常, ON : 开启失败)LB-12037 : COM 8 开启状态指示 (OFF : 正常, ON : 开启失败)LB-12038 : COM 9 开启状态指示 (OFF : 正常, ON : 开启失败)LB-12040 : 远程打印/备份服务器断线警示 (当状态为 ON)LB-12041 : 刷新 HMI 以太网信息 (DHCP, 网关, 掩码) (设置为 ON)LB-12042 : 开启/关闭 [System information] 对话窗 (设置为 ON/设置为 OFF)LB-12048 : U盘状态侦测 (当状态为 ON 时表示存在)LB-12050 : SD 卡状态侦测 (当状态为 ON 时表示存在)LB-12051 : 蜂鸣器控制 (当状态为 ON 时启动)LB-12052 : MODBUS server 状态 (当状态为 ON 时关闭 server 功能)LB-12056 : 用户操作未被授权的元件 (当状态为 ON)LB-12080 : 自动连接 PLC (CAN Bus) (当状态为 ON)LB-12081 : 与 PLC 的通讯状态 (CAN Bus), 设 ON 重连一次LB-12082 : 禁止弹出 CAN Bus 设备的 "PLC No Response" 窗口 (当状态为 ON) LB-12100 : 暂停 CAN Bus 设备 1 的通讯 (当状态为 ON)LB-12101 : 暂停 CAN Bus 设备 2 的通讯 (当状态为 ON)LB-12102 : 暂停 CAN Bus 设备 3 的通讯 (当状态为 ON)LB-12103 : 暂停 CAN Bus 设备 4 的通讯 (当状态为 ON)LB-12104 : 暂停 CAN Bus 设备 5 的通讯 (当状态为 ON)LB-12105 : 暂停 CAN Bus 设备 6 的通讯 (当状态为 ON)LB-12106 : 暂停 CAN Bus 设备 7 的通讯 (当状态为 ON)LB-12107 : 暂停 CAN Bus 设备 8 的通讯 (当状态为 ON)LB-12108 : 暂停 CAN Bus 设备 9 的通讯 (当状态为 ON)LB-12109 : 暂停 CAN Bus 设备 10 的通讯 (当状态为 ON)LB-12354 : 暂停 CAN Bus 设备 255 的通讯 (当状态为 ON)LB-12358 : 启用 (设 ON) / 停用 (设 OFF) 于 HMI 上的脱机模拟LW-9002 (32bit-float) : 数值输入元件允许输入的上限值LW-9004 (32bit-float) : 数值输入元件允许输入的下限值LW-9006 (16bit) : 连接到本机的远端 HMI 数目LW-9007 (16bit) : 硬件索引编号LW-9008 (32bit-float) : 电池电压LW-9010 (16bit-BCD) : 本地时间 (秒)LW-9011 (16bit-BCD) : 本地时间 (分)LW-9012 (16bit-BCD) : 本地时间 (时)LW-9013 (16bit-BCD) : 本地时间 (日)LW-9014 (16bit-BCD) : 本地时间 (月)LW-9015 (16bit-BCD) : 本地时间 (年)LW-9016 (16bit-BCD) : 本地时间 (星期)LW-9017 (16bit) : 本地时间 (秒)LW-9018 (16bit) : 本地时间 (分)LW-9019 (16bit) : 本地时间 (时)LW-9020 (16bit) : 本地时间 (日)LW-9021 (16bit) : 本地时间 (月)LW-9022 (16bit) : 本地时间 (年)LW-9023 (16bit) : 本地时间 (星期)LW-9024 (16bit) : memory link 系统寄存器LW-9025 (16bit) : CPU 使用率LW-9026 (16bit) : OS 版本 (年)LW-9027 (16bit) : OS 版本 (月)LW-9028 (16bit) : OS 版本 (日)LW-9030 (32bit) : 系统时间 (单位 : 0.1 秒)LW-9032 (8 words) : 备份历史记录到 SD 卡, U盘的文件夹名称LW-9040 (16bit) : 背光灯亮度值LW-9041 (16bit) : 触控状态 (bit0=on: 正在触控屏幕)LW-9042 (16bit) : 触控时 X 的位置LW-9043 (16bit) : 触控时 Y 的位置LW-9044 (16bit) : 离开时 X 的位置LW-9045 (16bit) : 离开时 Y 的位置LW-9046 (32bit) : HMI 识别码LW-9048 (16bit) : 时间 (0 : AM, 1 ; PM)LW-9049 (16bit) : 本地时间 (12 小时制)LW-9050 (16bit) : 当前显示的基本窗口编号LW-9052 (32bit-float) : 数值输入元件的前一次输入值LW-9054 (32bit) : HMI 机型 IDLW-9060 (16bit) : HMI 内存里存在的事件记录文件数目LW-9061 (32bit) : HMI 内存里存在的事件记录文件大小LW-9063 (16bit) : HMI 内存里存在的资料取样文件数目LW-9064 (32bit) : HMI 内存里存在的资料取样文件大小LW-9070 (16bit) : 剩余空间警示下限 (Mega bytes)LW-9071 (16bit) : 系统保留的剩余空间 (Mega bytes)LW-9072 (32bit) : HMI 当前的剩余空间 (K bytes)LW-9074 (32bit) : SD 卡当前的剩余空间 (K bytes)LW-9076 (32bit) : U盘当前的剩余空间 (K bytes)LW-9080 (16bit) : 背光节能时间 (单位 : 分钟)LW-9081 (16bit) : 屏幕保护时间 (单位 : 分钟)LW-9082 (16bit) : 自动注销时间 (单位 : 分钟, 0 : 取消此功能) LW-9100 (14 words) : 工程文件的名称LW-9116 (32bit) : 工程文件的大小 (单位 : byte)LW-9118 (32bit) : 工程文件的大小 (单位 : K bytes)LW-9120 (32bit) : EasyBuilder Pro 版本LW-9122 (16bit) : 工程文件编译日期 [年]LW-9123 (16bit) : 工程文件编译日期 [月]LW-9124 (16bit) : 工程文件编译日期 [日]LW-9125 (16bit) : HMI 以太网所使用的网关 0 (只在 HMI 上有效)LW-9126 (16bit) : HMI 以太网所使用的网关 1 (只在 HMI 上有效)LW-9127 (16bit) : HMI 以太网所使用的网关 2 (只在 HMI 上有效)LW-9128 (16bit) : HMI 以太网所使用的网关 3 (只在 HMI 上有效)LW-9129 (16bit) : HMI 以太网所使用的IP 0 (只在 HMI 上有效)LW-9130 (16bit) : HMI 以太网所使用的IP 1 (只在 HMI 上有效)LW-9131 (16bit) : HMI 以太网所使用的IP 2 (只在 HMI 上有效)LW-9132 (16bit) : HMI 以太网所使用的IP 3 (只在 HMI 上有效)LW-9133 (16bit) : 以太网所使用的端口 (只在 HMI 上有效)LW-9134 (16bit) : 当前所使用的语言LW-9135 (16bit) : HMI 实际地址 (MAC) 0LW-9136 (16bit) : HMI 实际地址 (MAC) 1LW-9137 (16bit) : HMI 实际地址 (MAC) 2LW-9138 (16bit) : HMI 实际地址 (MAC) 3LW-9139 (16bit) : HMI 实际地址 (MAC) 4LW-9140 (16bit) : HMI 实际地址 (MAC) 5LW-9141 (16bit) : HMI 站号LW-9150 (32 words) : 显示当前键盘所输入的资料 (ASCII)LW-9199 (16bit) : 外部键盘编排模式 : 0 (QWERTY), 1 (AZERTY)LW-9200 (16bit) : 地址索引寄存器 0LW-9201 (16bit) : 地址索引寄存器 1LW-9202 (16bit) : 地址索引寄存器 2LW-9203 (16bit) : 地址索引寄存器 3LW-9204 (16bit) : 地址索引寄存器 4LW-9205 (16bit) : 地址索引寄存器 5LW-9206 (16bit) : 地址索引寄存器 6LW-9207 (16bit) : 地址索引寄存器 7LW-9208 (16bit) : 地址索引寄存器 8LW-9209 (16bit) : 地址索引寄存器 9LW-9210 (16bit) : 地址索引寄存器 10LW-9211 (16bit) : 地址索引寄存器 11LW-9212 (16bit) : 地址索引寄存器 12LW-9213 (16bit) : 地址索引寄存器 13LW-9214 (16bit) : 地址索引寄存器 14LW-9215 (16bit) : 地址索引寄存器 15LW-9216 (16bit) : 导入邮件数据的结果LW-9219 (16bit) : 用户编号 (1~12)LW-9220 (32bit) : 密码LW-9222 (16bit) : 当前用户可操作的元件类别 (bit 0:A, bit 1:B,bit 2:C, ...) LW-9230 (32bit) : 地址索引寄存器 16LW-9232 (32bit) : 地址索引寄存器 17LW-9234 (32bit) : 地址索引寄存器 18LW-9236 (32bit) : 地址索引寄存器 19LW-9238 (32bit) : 地址索引寄存器 20LW-9240 (32bit) : 地址索引寄存器 21LW-9242 (32bit) : 地址索引寄存器 22LW-9244 (32bit) : 地址索引寄存器 23LW-9246 (32bit) : 地址索引寄存器 24LW-9248 (32bit) : 地址索引寄存器 25LW-9250 (32bit) : 地址索引寄存器 26LW-9252 (32bit) : 地址索引寄存器 27LW-9254 (32bit) : 地址索引寄存器 28LW-9256 (32bit) : 地址索引寄存器 29LW-9258 (32bit) : 地址索引寄存器 30LW-9260 (32bit) : 地址索引寄存器 31LW-9270 (16bit) : 请求的功能码 - MODBUS server (COM 1)LW-9271 (16bit) : 请求的开始地址 - MODBUS server (COM 1) LW-9272 (16bit) : 请求的地址数目 - MODBUS server (COM 1) LW-9275 (16bit) : 请求的功能码 - MODBUS server (COM 2)LW-9276 (16bit) : 请求的开始地址 - MODBUS server (COM 2) LW-9277 (16bit) : 请求的地址数目 - MODBUS server (COM 2) LW-9280 (16bit) : 请求的功能码 - MODBUS server (COM 3)LW-9281 (16bit) : 请求的开始地址 - MODBUS server (COM 3) LW-9282 (16bit) : 请求的地址数目 - MODBUS server (COM 3) LW-9285 (16bit) : 请求的功能码 - MODBUS server (以太网)LW-9286 (16bit) : 请求的开始地址 - MODBUS server (以太网) LW-9287 (16bit) : 请求的地址数目 - MODBUS server (以太网) LW-9288 (16bit) : 最后通讯错误码 - MODBUS server (以太网) LW-9300 (16bit) : 连接在本机的 PLC 1 所使用的驱动程序编号LW-9301 (16bit) : 连接在本机的 PLC 2 所使用的驱动程序编号LW-9302 (16bit) : 连接在本机的 PLC 3 所使用的驱动程序编号LW-9303 (16bit) : 连接在本机的 PLC 4 所使用的驱动程序编号LW-9331 (16bit) : 连接在本机的 PLC 32 所使用的驱动程序编号LW-9350 (16bit) : 本机尚未处理的命令数目LW-9351 (16bit) : PLC 1 (COM 1) 尚未处理的命令数目LW-9352 (16bit) : PLC 2 (COM 2) 尚未处理的命令数目LW-9353 (16bit) : PLC 3 (COM 3) 尚未处理的命令数目LW-9354 (16bit) : PLC 4 (以太网) 尚未处理的命令数目LW-9355 (16bit) : PLC 5 (以太网) 尚未处理的命令数目LW-9356 (16bit) : PLC 6 (以太网) 尚未处理的命令数目LW-9357 (16bit) : PLC 7 (以太网) 尚未处理的命令数目LW-9389 (16bit) : PLC 39 (以太网) 尚未处理的命令数目LW-9390 (16bit) : PLC (USB) 尚未处理的命令数目LW-9392 (16bit) : PLC (CAN Bus) 尚未处理的命令数目LW-9400 (16bit) : 与 PLC 1 通讯错误时产生的错误信息LW-9401 (16bit) : 与 PLC 2 通讯错误时产生的错误信息LW-9402 (16bit) : 与 PLC 3 通讯错误时产生的错误信息LW-9403 (16bit) : 与 PLC 4 通讯错误时产生的错误信息LW-9404 (16bit) : 与 PLC 5 通讯错误时产生的错误信息LW-9405 (16bit) : 与 PLC 6 通讯错误时产生的错误信息LW-9406 (16bit) : 与 PLC 7 通讯错误时产生的错误信息LW-9407 (16bit) : 与 PLC 8 通讯错误时产生的错误信息LW-9449 (16bit) : 与 PLC 50 通讯错误时产生的错误信息LW-9450 (16bit) : 事件登录的时间标签 - 秒LW-9451 (16bit) : 事件登录的时间标签 - 分LW-9452 (16bit) : 事件登录的时间标签 - 時LW-9453 (16bit) : 事件登录的时间标签 - 日LW-9454 (16bit) : 事件登录的时间标签 - 月LW-9455 (16bit) : 事件登录的时间标签 - 年LW-9490 (16bit) : 与 PLC (USB) 通讯错误时产生的错误信息LW-9491 (16bit) : 与 PLC (CAN-Bus) 通讯错误时产生的错误信息LW-9500 (32bit) : 用户 1 密码LW-9502 (32bit) : 用户 2 密码LW-9504 (32bit) : 用户 3 密码LW-9506 (32bit) : 用户 4 密码LW-9508 (32bit) : 用户 5 密码LW-9510 (32bit) : 用户 6 密码LW-9512 (32bit) : 用户 7 密码LW-9514 (32bit) : 用户 8 密码LW-9516 (32bit) : 用户 9 密码LW-9518 (32bit) : 用户 10 密码LW-9520 (32bit) : 用户 11 密码LW-9522 (32bit) : 用户 12 密码LW-9540 (16bit) : 键盘大小写切换LW-9541 (16bit) : MODBUS/ASCII server 站号 (COM 1)LW-9542 (16bit) : MODBUS/ASCII server 站号 (COM 2)LW-9543 (16bit) : MODBUS/ASCII server 站号 (COM 3)LW-9544 (16bit) : MODBUS/ASCII server 站号 (以太网)LW-9550 (16bit) : COM 1 类型 (0:RS232,1:RS485 2W,2:RS485 4W)LW-9551 (16bit) : COM 1 波特率 (7:1200,8:2400,0:4800,1:9600,10:14400,2:19200,11:28800,3:38400,4:57600,..) LW-9552 (16bit) : COM 1 数据位 (7 : 7 bits, 8 : 8 bits)LW-9553 (16bit) : COM 1 校验 (0:none, 1:even, 2:odd, 3:mark, 4:space)LW-9554 (16bit) : COM 1 停止位 (1 : 1 bit, 2 : 2 bits)LW-9555 (16bit) : COM 2 类型 (0:RS232,1:RS485 2W,2:RS485 4W)LW-9556 (16bit) : COM 2 波特率 (7:1200,8:2400,0:4800,1:9600,10:14400,2:19200,11:28800,3:38400,4:57600,..) LW-9557 (16bit) : COM 2 数据位 (7 : 7 bits, 8 : 8 bits)LW-9558 (16bit) : COM 2 校验 (0:none, 1:even, 2:odd, 3:mark, 4:space)LW-9559 (16bit) : COM 2 停止位 (1 : 1 bit, 2 : 2 bits)LW-9560 (16bit) : COM 3 类型 (0:RS232, 1:RS485 2W)LW-9561 (16bit) : COM 3 波特率 (7:1200,8:2400,0:4800,1:9600,10:14400,2:19200,11:28800,3:38400,4:57600,..) LW-9562 (16bit) : COM 3 数据位 (7 : 7 bits, 8 : 8 bits)LW-9563 (16bit) : COM 3 校验 (0:none, 1:even, 2:odd, 3:mark, 4:space)LW-9564 (16bit) : COM 3 停止位 (1 : 1 bit, 2 : 2 bits)LW-9565 (16bit) : COM 1 广播站号LW-9566 (16bit) : COM 2 广播站号LW-9567 (16bit) : COM 3 广播站号LW-9570 (32bit) : 已接收的数据 (bytes) (COM 1 MODBUS server)LW-9572 (32bit) : 已接收的数据 (bytes) (COM 2 MODBUS server)LW-9574 (32bit) : 已接收的数据 (bytes) (COM 3 MODBUS server)LW-9576 (32bit) : 已接收的数据 (bytes) (以太网 MODBUS server)LW-9600 (16bit) : PLC 4 的 IP0 (IP地址 = IP0:IP1:IP2:IP3)LW-9601 (16bit) : PLC 4 的 IP1 (IP地址 = IP0:IP1:IP2:IP3)LW-9602 (16bit) : PLC 4 的 IP2 (IP地址 = IP0:IP1:IP2:IP3)LW-9603 (16bit) : PLC 4 的 IP3 (IP地址 = IP0:IP1:IP2:IP3)LW-9604 (16bit) : PLC 4 的端口LW-9605 (16bit) : PLC 5 的 IP0 (IP地址 = IP0:IP1:IP2:IP3)LW-9606 (16bit) : PLC 5 的 IP1 (IP地址 = IP0:IP1:IP2:IP3)LW-9607 (16bit) : PLC 5 的 IP2 (IP地址 = IP0:IP1:IP2:IP3)LW-9608 (16bit) : PLC 5 的 IP3 (IP地址 = IP0:IP1:IP2:IP3)LW-9609 (16bit) : PLC 5 的端口LW-9610 (16bit) : PLC 6 的 IP0 (IP地址 = IP0:IP1:IP2:IP3)LW-9611 (16bit) : PLC 6 的 IP1 (IP地址 = IP0:IP1:IP2:IP3)LW-9612 (16bit) : PLC 6 的 IP2 (IP地址 = IP0:IP1:IP2:IP3)LW-9613 (16bit) : PLC 6 的 IP3 (IP地址 = IP0:IP1:IP2:IP3)LW-9614 (16bit) : PLC 6 的端口LW-9615 (16bit) : PLC 7 的 IP0 (IP地址 = IP0:IP1:IP2:IP3)LW-9616 (16bit) : PLC 7 的 IP1 (IP地址 = IP0:IP1:IP2:IP3)LW-9617 (16bit) : PLC 7 的 IP2 (IP地址 = IP0:IP1:IP2:IP3)LW-9618 (16bit) : PLC 7 的 IP3 (IP地址 = IP0:IP1:IP2:IP3)LW-9619 (16bit) : PLC 7 的端口LW-9620 (16bit) : PLC 8 的 IP0 (IP地址 = IP0:IP1:IP2:IP3)LW-9621 (16bit) : PLC 8 的 IP1 (IP地址 = IP0:IP1:IP2:IP3)LW-9622 (16bit) : PLC 8 的 IP2 (IP地址 = IP0:IP1:IP2:IP3)LW-9623 (16bit) : PLC 8 的 IP3 (IP地址 = IP0:IP1:IP2:IP3)LW-9624 (16bit) : PLC 8 的端口LW-9625 (16bit) : PLC 9 的 IP0 (IP地址 = IP0:IP1:IP2:IP3) LW-9626 (16bit) : PLC 9 的 IP1 (IP地址 = IP0:IP1:IP2:IP3) LW-9627 (16bit) : PLC 9 的 IP2 (IP地址 = IP0:IP1:IP2:IP3) LW-9628 (16bit) : PLC 9 的 IP3 (IP地址 = IP0:IP1:IP2:IP3) LW-9629 (16bit) : PLC 9 的端口LW-9765 (16bit) : PLC 37 的 IP0 (IP地址 = IP0:IP1:IP2:IP3) LW-9766 (16bit) : PLC 37 的 IP1 (IP地址 = IP0:IP1:IP2:IP3) LW-9767 (16bit) : PLC 37 的 IP2 (IP地址 = IP0:IP1:IP2:IP3) LW-9768 (16bit) : PLC 37 的 IP3 (IP地址 = IP0:IP1:IP2:IP3) LW-9769 (16bit) : PLC 37 的端口LW-9770 (16bit) : 远端打印/备份服务器的 IP0 (IP0:IP1:IP2:IP3) LW-9771 (16bit) : 远端打印/备份服务器的 IP1 (IP0:IP1:IP2:IP3) LW-9772 (16bit) : 远端打印/备份服务器的 IP2 (IP0:IP1:IP2:IP3) LW-9773 (16bit) : 远端打印/备份服务器的 IP3 (IP0:IP1:IP2:IP3) LW-9774 (6 words) : 登录远端打印/备份服务器所需的用户名称LW-9780 (6 words) : 登录远端打印/备份服务器所需的密码LW-9800 (16bit) : 远端 HMI 1 的 IP0 (IP地址 = IP0:IP1:IP2:IP3) LW-9801 (16bit) : 远端 HMI 1 的 IP1 (IP地址 = IP0:IP1:IP2:IP3) LW-9802 (16bit) : 远端 HMI 1 的 IP2 (IP地址 = IP0:IP1:IP2:IP3) LW-9803 (16bit) : 远端 HMI 1 的 IP3 (IP地址 = IP0:IP1:IP2:IP3) LW-9804 (16bit) : 远端 HMI 1 的端口LW-9805 (16bit) : 远端 HMI 2 的 IP0 (IP地址 = IP0:IP1:IP2:IP3) LW-9806 (16bit) : 远端 HMI 2 的 IP1 (IP地址 = IP0:IP1:IP2:IP3) LW-9807 (16bit) : 远端 HMI 2 的 IP2 (IP地址 = IP0:IP1:IP2:IP3) LW-9808 (16bit) : 远端 HMI 2 的 IP3 (IP地址 = IP0:IP1:IP2:IP3) LW-9809 (16bit) : 远端 HMI 2 的端口LW-9810 (16bit) : 远端 HMI 3 的 IP0 (IP地址 = IP0:IP1:IP2:IP3) LW-9811 (16bit) : 远端 HMI 3 的 IP1 (IP地址 = IP0:IP1:IP2:IP3) LW-9812 (16bit) : 远端 HMI 3 的 IP2 (IP地址 = IP0:IP1:IP2:IP3) LW-9813 (16bit) : 远端 HMI 3 的 IP3 (IP地址 = IP0:IP1:IP2:IP3) LW-9814 (16bit) : 远端 HMI 3 的端口LW-9815 (16bit) : 远端 HMI 4 的 IP0 (IP地址 = IP0:IP1:IP2:IP3) LW-9816 (16bit) : 远端 HMI 4 的 IP1 (IP地址 = IP0:IP1:IP2:IP3) LW-9817 (16bit) : 远端 HMI 4 的 IP2 (IP地址 = IP0:IP1:IP2:IP3) LW-9818 (16bit) : 远端 HMI 4 的 IP3 (IP地址 = IP0:IP1:IP2:IP3) LW-9819 (16bit) : 远端 HMI 4 的端口LW-9820 (16bit) : 远端 HMI 5 的 IP0 (IP地址 = IP0:IP1:IP2:IP3) LW-9821 (16bit) : 远端 HMI 5 的 IP1 (IP地址 = IP0:IP1:IP2:IP3) LW-9822 (16bit) : 远端 HMI 5 的 IP2 (IP地址 = IP0:IP1:IP2:IP3) LW-9823 (16bit) : 远端 HMI 5 的 IP3 (IP地址 = IP0:IP1:IP2:IP3) LW-9824 (16bit) : 远端 HMI 5 的端口LW-9825 (16bit) : 远端 HMI 6 的 IP0 (IP地址 = IP0:IP1:IP2:IP3) LW-9826 (16bit) : 远端 HMI 6 的 IP1 (IP地址 = IP0:IP1:IP2:IP3) LW-9827 (16bit) : 远端 HMI 6 的 IP2 (IP地址 = IP0:IP1:IP2:IP3) LW-9828 (16bit) : 远端 HMI 6 的 IP3 (IP地址 = IP0:IP1:IP2:IP3) LW-9829 (16bit) : 远端 HMI 6 的端口LW-9830 (16bit) : 远端 HMI 7 的 IP0 (IP地址 = IP0:IP1:IP2:IP3) LW-9831 (16bit) : 远端 HMI 7 的 IP1 (IP地址 = IP0:IP1:IP2:IP3) LW-9832 (16bit) : 远端 HMI 7 的 IP2 (IP地址 = IP0:IP1:IP2:IP3) LW-9833 (16bit) : 远端 HMI 7 的 IP3 (IP地址 = IP0:IP1:IP2:IP3) LW-9834 (16bit) : 远端 HMI 7 的端口LW-9835 (16bit) : 远端 HMI 8 的 IP0 (IP地址 = IP0:IP1:IP2:IP3) LW-9836 (16bit) : 远端 HMI 8 的 IP1 (IP地址 = IP0:IP1:IP2:IP3) LW-9837 (16bit) : 远端 HMI 8 的 IP2 (IP地址 = IP0:IP1:IP2:IP3) LW-9838 (16bit) : 远端 HMI 8 的 IP3 (IP地址 = IP0:IP1:IP2:IP3) LW-9839 (16bit) : 远端 HMI 8 的端口LW-9895 (16bit) : 远端 HMI 20 的 IP0 (IP地址 = IP0:IP1:IP2:IP3)LW-9896 (16bit) : 远端 HMI 20 的 IP1 (IP地址 = IP0:IP1:IP2:IP3)LW-9897 (16bit) : 远端 HMI 20 的 IP2 (IP地址 = IP0:IP1:IP2:IP3)LW-9898 (16bit) : 远端 HMI 20 的 IP3 (IP地址 = IP0:IP1:IP2:IP3)LW-9899 (16bit) : 远端 HMI 20 的端口LW-9900 (16bit) : HMI 工作模式 (0 : 正常模式, 1~3 : 测试模式 (COM 1~COM 3)LW-9901 (16bit) : 穿透通讯数据来源串行端口 (1~3 : COM 1~COM 3)LW-9902 (16bit) : 穿透通讯数据目标串行端口 (1~3 : COM 1~COM 3)LW-9903 (16bit) : 穿透通讯控制 (0 : 正常, 1 : 暂停, 2 : 执行穿透功能时, 停止 HMI 与 PLC 间的通讯) LW-9904 (16bit) : 穿透服务器端口号 (2000~2100)LW-9905 (16bit) : 远端 HMI 21 的 IP0 (IP地址 = IP0:IP1:IP2:IP3)LW-9906 (16bit) : 远端 HMI 21 的 IP1 (IP地址 = IP0:IP1:IP2:IP3)LW-9907 (16bit) : 远端 HMI 21 的 IP2 (IP地址 = IP0:IP1:IP2:IP3)LW-9908 (16bit) : 远端 HMI 21 的 IP3 (IP地址 = IP0:IP1:IP2:IP3)LW-9909 (16bit) : 远端 HMI 21 的端口号LW-9910 (16bit) : 远端 HMI 22 的 IP0 (IP地址 = IP0:IP1:IP2:IP3)LW-9911 (16bit) : 远端 HMI 22 的 IP1 (IP地址 = IP0:IP1:IP2:IP3)LW-9912 (16bit) : 远端 HMI 22 的 IP2 (IP地址 = IP0:IP1:IP2:IP3)LW-9913 (16bit) : 远端 HMI 22 的 IP3 (IP地址 = IP0:IP1:IP2:IP3)LW-9914 (16bit) : 远端 HMI 22 的端口号LW-9915 (16bit) : 远端 HMI 23 的 IP0 (IP地址 = IP0:IP1:IP2:IP3)LW-9916 (16bit) : 远端 HMI 23 的 IP1 (IP地址 = IP0:IP1:IP2:IP3)LW-9917 (16bit) : 远端 HMI 23 的 IP2 (IP地址 = IP0:IP1:IP2:IP3)LW-9918 (16bit) : 远端 HMI 23 的 IP3 (IP地址 = IP0:IP1:IP2:IP3)LW-9919 (16bit) : 远端 HMI 23 的端口号LW-9920 (16bit) : 远端 HMI 24 的 IP0 (IP地址 = IP0:IP1:IP2:IP3)LW-9921 (16bit) : 远端 HMI 24 的 IP1 (IP地址 = IP0:IP1:IP2:IP3)LW-9922 (16bit) : 远端 HMI 24 的 IP2 (IP地址 = IP0:IP1:IP2:IP3)LW-9923 (16bit) : 远端 HMI 24 的 IP3 (IP地址 = IP0:IP1:IP2:IP3)LW-9924 (16bit) : 远端 HMI 24 的端口号LW-9925 (16bit) : 远端 HMI 25 的 IP0 (IP地址 = IP0:IP1:IP2:IP3)LW-9926 (16bit) : 远端 HMI 25 的 IP1 (IP地址 = IP0:IP1:IP2:IP3)LW-9927 (16bit) : 远端 HMI 25 的 IP2 (IP地址 = IP0:IP1:IP2:IP3)LW-9928 (16bit) : 远端 HMI 25 的 IP3 (IP地址 = IP0:IP1:IP2:IP3)LW-9929 (16bit) : 远端 HMI 25 的端口号LW-9930 (16bit) : 远端 HMI 26 的 IP0 (IP地址 = IP0:IP1:IP2:IP3)LW-9931 (16bit) : 远端 HMI 26 的 IP1 (IP地址 = IP0:IP1:IP2:IP3)LW-9932 (16bit) : 远端 HMI 26 的 IP2 (IP地址 = IP0:IP1:IP2:IP3)LW-9933 (16bit) : 远端 HMI 26 的 IP3 (IP地址 = IP0:IP1:IP2:IP3)LW-9934 (16bit) : 远端 HMI 26 的端口号LW-9935 (16bit) : 远端 HMI 27 的 IP0 (IP地址 = IP0:IP1:IP2:IP3)LW-9936 (16bit) : 远端 HMI 27 的 IP1 (IP地址 = IP0:IP1:IP2:IP3)LW-9937 (16bit) : 远端 HMI 27 的 IP2 (IP地址 = IP0:IP1:IP2:IP3)LW-9938 (16bit) : 远端 HMI 27 的 IP3 (IP地址 = IP0:IP1:IP2:IP3)LW-9939 (16bit) : 远端 HMI 27 的端口号LW-9940 (16bit) : 远端 HMI 28 的 IP0 (IP地址 = IP0:IP1:IP2:IP3)LW-9941 (16bit) : 远端 HMI 28 的 IP1 (IP地址 = IP0:IP1:IP2:IP3)LW-9942 (16bit) : 远端 HMI 28 的 IP2 (IP地址 = IP0:IP1:IP2:IP3)LW-9943 (16bit) : 远端 HMI 28 的 IP3 (IP地址 = IP0:IP1:IP2:IP3)LW-9944 (16bit) : 远端 HMI 28 的端口号LW-9945 (16bit) : 远端 HMI 29 的 IP0 (IP地址 = IP0:IP1:IP2:IP3)LW-9946 (16bit) : 远端 HMI 29 的 IP1 (IP地址 = IP0:IP1:IP2:IP3)LW-9947 (16bit) : 远端 HMI 29 的 IP2 (IP地址 = IP0:IP1:IP2:IP3)LW-9948 (16bit) : 远端 HMI 29 的 IP3 (IP地址 = IP0:IP1:IP2:IP3)LW-9949 (16bit) : 远端 HMI 29 的端口号LW-9950 (16bit) : 远端 HMI 30 的 IP0 (IP地址 = IP0:IP1:IP2:IP3)LW-9951 (16bit) : 远端 HMI 30 的 IP1 (IP地址 = IP0:IP1:IP2:IP3)LW-9952 (16bit) : 远端 HMI 30 的 IP2 (IP地址 = IP0:IP1:IP2:IP3)LW-9953 (16bit) : 远端 HMI 30 的 IP3 (IP地址 = IP0:IP1:IP2:IP3)LW-9954 (16bit) : 远端 HMI 30 的端口号LW-9955 (16bit) : 远端 HMI 31 的 IP0 (IP地址 = IP0:IP1:IP2:IP3)LW-9956 (16bit) : 远端 HMI 31 的 IP1 (IP地址 = IP0:IP1:IP2:IP3)LW-9957 (16bit) : 远端 HMI 31 的 IP2 (IP地址 = IP0:IP1:IP2:IP3)LW-9958 (16bit) : 远端 HMI 31 的 IP3 (IP地址 = IP0:IP1:IP2:IP3)LW-9959 (16bit) : 远端 HMI 31 的端口号LW-9960 (16bit) : 远端 HMI 32 的 IP0 (IP地址 = IP0:IP1:IP2:IP3)LW-9961 (16bit) : 远端 HMI 32 的 IP1 (IP地址 = IP0:IP1:IP2:IP3)LW-9962 (16bit) : 远端 HMI 32 的 IP2 (IP地址 = IP0:IP1:IP2:IP3)LW-9963 (16bit) : 远端 HMI 32 的 IP3 (IP地址 = IP0:IP1:IP2:IP3)LW-9964 (16bit) : 远端 HMI 32 的端口号LW-9995 (16bit) : 远端 HMI 39 的 IP0 (IP地址 = IP0:IP1:IP2:IP3)LW-9996 (16bit) : 远端 HMI 39 的 IP1 (IP地址 = IP0:IP1:IP2:IP3)LW-9997 (16bit) : 远端 HMI 39 的 IP2 (IP地址 = IP0:IP1:IP2:IP3)LW-9998 (16bit) : 远端 HMI 39 的 IP3 (IP地址 = IP0:IP1:IP2:IP3)LW-9999 (16bit) : 远端 HMI 39 的端口LW-10000 (16bit) : var0 - 站号变量 (语法 : var0#地址)LW-10001 (16bit) : var1 - 站号变量 (语法 : var1#地址)LW-10002 (16bit) : var2 - 站号变量 (语法 : var2#地址)LW-10003 (16bit) : var3 - 站号变量 (语法 : var3#地址)LW-10004 (16bit) : var4 - 站号变量 (语法 : var4#地址)LW-10005 (16bit) : var5 - 站号变量 (语法 : var5#地址)LW-10006 (16bit) : var6 - 站号变量 (语法 : var6#地址)LW-10007 (16bit) : var7 - 站号变量 (语法 : var7#地址)LW-10008 (16bit) : var8 - 站号变量 (语法 : var8#地址)LW-10009 (16bit) : var9 - 站号变量 (语法 : var9#地址)LW-10010 (16bit) : var10 - 站号变量 (语法 : var10#地址)LW-10011 (16bit) : var11 - 站号变量 (语法 : var11#地址)LW-10012 (16bit) : var12 - 站号变量 (语法 : var12#地址)LW-10013 (16bit) : var13 - 站号变量 (语法 : var13#地址)LW-10014 (16bit) : var14 - 站号变量 (语法 : var14#地址)LW-10015 (16bit) : var15 - 站号变量 (语法 : var15#地址)LW-10050 (16bit) : 连接远端 PLC 1 的 HMI 的 IP0 (IP 地址 = IP0:IP1:IP2:IP3) LW-10051 (16bit) : 连接远端 PLC 1 的 HMI 的 IP1 (IP 地址 = IP0:IP1:IP2:IP3) LW-10052 (16bit) : 连接远端 PLC 1 的 HMI 的 IP2 (IP 地址 = IP0:IP1:IP2:IP3) LW-10053 (16bit) : 连接远端 PLC 1 的 HMI 的 IP3 (IP 地址 = IP0:IP1:IP2:IP3) LW-10054 (16bit) : 连接远端 PLC 1 的 HMI 的端口LW-10055 (16bit) : 连接远端 PLC 2 的 HMI 的 IP0 (IP 地址 = IP0:IP1:IP2:IP3) LW-10056 (16bit) : 连接远端 PLC 2 的 HMI 的 IP1 (IP 地址 = IP0:IP1:IP2:IP3) LW-10057 (16bit) : 连接远端 PLC 2 的 HMI 的 IP2 (IP 地址 = IP0:IP1:IP2:IP3) LW-10058 (16bit) : 连接远端 PLC 2 的 HMI 的 IP3 (IP 地址 = IP0:IP1:IP2:IP3) LW-10059 (16bit) : 连接远端 PLC 2 的 HMI 的端口LW-10060 (16bit) : 连接远端 PLC 3 的 HMI 的 IP0 (IP 地址 = IP0:IP1:IP2:IP3) LW-10061 (16bit) : 连接远端 PLC 3 的 HMI 的 IP1 (IP 地址 = IP0:IP1:IP2:IP3) LW-10062 (16bit) : 连接远端 PLC 3 的 HMI 的 IP2 (IP 地址 = IP0:IP1:IP2:IP3) LW-10063 (16bit) : 连接远端 PLC 3 的 HMI 的 IP3 (IP 地址 = IP0:IP1:IP2:IP3) LW-10064 (16bit) : 连接远端 PLC 3 的 HMI 的端口LW-10065 (16bit) : 连接远端 PLC 4 的 HMI 的 IP0 (IP 地址 = IP0:IP1:IP2:IP3) LW-10066 (16bit) : 连接远端 PLC 4 的 HMI 的 IP1 (IP 地址 = IP0:IP1:IP2:IP3) LW-10067 (16bit) : 连接远端 PLC 4 的 HMI 的 IP2 (IP 地址 = IP0:IP1:IP2:IP3) LW-10068 (16bit) : 连接远端 PLC 4 的 HMI 的 IP3 (IP 地址 = IP0:IP1:IP2:IP3) LW-10069 (16bit) : 连接远端 PLC 4 的 HMI 的端口LW-10205 (16bit) : 连接远端 PLC 32 的 HMI 的 IP0 (IP 地址 = IP0:IP1:IP2:IP3)。
Quick Connect Basic Installation and user 说明书
Easy to install Adaptable for changesSeveral labs in one 100 % safeEasy to installPre-install and decide laterServeral labs in one100 % safeThis is an installations guide for Quick Connect Basic.Quick Connect is the new, innovative and flexible lab solution.Quick Connect is based on the concept plug and play and easy to install. BROEN-LAB has furthermore made a drilling template which makes it easi-er to drill the mounting holes for the installation of Quick Connect. For futher information see page 23.Before installation please read the chapter, Purity on page 22.PANEL MOUNTEDBUILT-IN MOUNTEDBENCH MOUNTEDEXPOSED PIPECONCEALED PIPESUSPENDED MOUNTEDDISC MOUNTEDTable of Contents 4-5 Quick Connect Basicmounted 6-7 Panelmounted 8-9 Built-inBench mounted 10-11 Exposed pipe mounted 12-13 Concealed pipe mounted 14-15 Suspended mounted 16-17 Disc mounted 18-19 Changing media type 20-21 Purity 2.0, 4.0, 5.0 22 Drilling template 23 Trouble shooting guide 24-25 Accessories and datasheets 26-27Temperature range: 0-90o CMax. working pressure: 16 bar/232 psi Inlet: BROEN-LAB UniFlex TM Materials with media contact Metals: BrassNitrile (NBR) VITON (FKM) EPDM Panel thickness up to 26 mmAssemblyCartrid g eO-ringM4 (x2) screwFront partFront ringRear PartNutFemale BROEN-LABUniFlex TMSTEP 1STEP 2STEP 3MountingDatasheetTool: A wrench key+1All measurements are in mmTemperature range: 0-90o CMax. working pressure: 16 bar/232 psiPanel thickness 1-6 mm AssemblyCover ringO-ringFront partFront ringGASInlet: Femal e BROEN-LAB UniFlex TM Materials with media contactMetals: Brass Nitrile (NBR) VITON (FKM) EPDMg eDatasheetMountingTool: Allen key 3 mm for (2x) M5x8 screws Allen key 2,5 mm for (2x) M4 screws2,5 mm 3 mmNice to know!Built-in is delivered assembled and has to be disassembled before mounting - Follow the mounting backwardsPlace the rear part from theDepending on the wall thick-Place the locking plate Place the front part over the All measurements are in mmMount with (2x) M5x8 mmTemperature range: 0-90o CMax. working pressure: 16 bar/232 psiInlet: BROEN-LAB UniFlex TM Panel thickness 30-90 mm AssemblyCoverRear PartM3x12 ScrewInlet pipeUniFlex Connection (Need to be pre-mounted)Materials with media contactMetals: Brass Nitrile (NBR) VITON (FKM) EPDMDatasheetSTEP 1STEP 2STEP 3MountingTool: A Phillips screwdriver, size 21234All measurements are in mmTemperature range: 0-90o CMax. working pressure: 16 bar/232 psi Inlet: BROEN-LAB UniFlex TM Assemblyg eM4 (x2) screwFront partFront ringRear PartFemale BROEN-LAB UniFlex compression Materials with media contactMetals: Brass Nitrile (NBR) VITON (FKM) EPDMOnly for plates where threads can be drilled.MountingTool: Allen key for M3x25 (x4) screw s A llen key for M4 (x2) screwsFront: Use (4x) M3x25 mounting screws ( included) Rear: Use (4x) M4x25 screws (included)mm STEP 3STEP 4STEP 6STEP 7STEP 8STEP 1Front:Mounting with (4x) M3 mm screws Rear:Mounting with (4x) M4 mm screwsPush the cartrigde into therear partTighten the (2x) M4 screwsPush the front ring with light forceinto placeDraw a centerline and place the sticker with the drilling template e STEP 5Slide the black cover onDrill after the green marks on thestickerNice to know!Exposed isdelivered assembled and has to bedisassembled before mounting - Follow the mounting backwards3 mmCatridgeFemaleBROEN-LAB UniFlex TMFront partFront ringRear PartTemperature range: 0-90o CMax. working pressure: 16 bar/232 psiInlet: BROEN-LAB UniFlex TM AssemblyMaterials with media contactMetals: Brass Nitrile (NBR) VITON (FKM) EPDMFor furniture without space fortightening behind the wallMountingDatasheet6STEP 8Mounting with (4x) M3x25 mm screws Push the catridge into the rear partSlide the black cover on Push the front ring with light forceinto placeTool: Allen key for (4x) M3x25 screwsA llen key for (2x) M4 screws (front mounting and media changing- includedSTEP 3STEP 4STEP 5mmNice to know!Concealed isdelivered assembledand has to bedisassembled beforemounting - Follow themounting backwardsAll measurements are in mmSTEP 2STEP 1Drill after the green and redmarks on the stickerTemperature range: 0-90o CMax. working pressure: 16 bar/232 psiPanel thickness 30-90 mm AssemblyCoverRear PartM3x12 ScrewMounting plateLocking pinsInlet pipeHoseUniFlex ConnectionInlet: BROEN-LAB UniFlex TM Materials with media contactMetals: Brass Nitrile (NBR) VITON (FKM) EPDMMountingDatasheetSTEP 2STEP 3Tool: A Phillips screwdriver , size 21234mmSTEP 1Inlet: BROEN-LAB UniFlex TM /For porous wallsTemperature range: 0-90o CAssemblyCatridge Cover, Long O-ringFemaleTMM4 (x2) screw Front partFront ring(4x) M3x25Mounting discMaterials with media contactMetals: Brass Nitrile (NBR) VITON (FKM) EPDMFront mounting in soft material where threads not can be drilledDatasheetSTEP 3STEP 4STEP 6STEP 7STEP 8STEP 1Mount the mounting disc with screws - not included Moun t the rear part with the (4x) M3 x25 mm screwsTighten the (2x) M4 mm screwsPush the front ring with light forceinto placeDraw a centerline and place the sticker with the drilling template eSTEP 5Slide the black cover onDrill after the blue and red markson the sticker All measurements are in mmWith Quick Connect is it possible to make last minute changes.It is important only to change between the gases within the same category.There are 3 categories: Non-burning gases, burning gases and water.Types of mediaThe changeable mediaNon-burning gases Burning gases WaterNot possiblePossibleMedia changingSTEP 1STEP 2Move the front ring i.e. CA by pulling it out with lightforceLoosen the (2x) M4 mm screws - only a little bit.12Push the front ring with light force into placeTighten the (2x) M4 mm screws12Tool: 3 mmSTEP 5STEP 62.0, 4.0 and 5.0 indicate the purity of the gases.2.04.05.099 %99,99 %99,999 %Changes or modifications are not allowed to be made to the equipment without prior approval from BROEN -LAB .Improper handling or use can involve risks for the user and other persons as well as damage of the equipment.The equipment can only be used for the gas type it was manufactured and labelled for. Change can be made prior to start of use, provided that the new media is listed in the data sheet, or BROEN -LAB has approved the new media.Observe the maximum pressure & temperature ranges.The equipment cannot be used for gases in the liquid phase.The equipment must not be exposed to impact, vibrations or other mechanical forces that can damage the equipment. The equipment is designed for use in laboratories. The equipment is not designed for installing where there is a possibility of exposure to aggressive media.By installation avoid oil and grease contamination (Fire or explosion hazard). It is recommended to use a proper leak detection fluid or similar to check for leak when installing and using the Quick Connect.These valves do not contain a relief valve. In case of failure, the outlet pressure may rise above the adjusted value. Anyequipment connected to the equipment Purity 5.0 in useWhen changing the outletTo maintain a purity of 5.0, BROEN-LAB recommends to purge the system in 30 sec. before usage, when you change the outlet.Safety instructionsHandling of technical gases requires knowledge of the subject, operation instructions and special safety measures. Always check national and local laws, regulations and procedures regarding the installation and use of this type of equipment., ERROR CAUSE ACTIONERROR CAUSE ACTIONThe outlet is leaking There are leaksinside the outlet Replace the o utlet with a new oneAccessorie s Datasheet s97Pressure regulatorDatasheet sAccessorie sBROEN-LAB Ltd.BROEN-LAB Singapore Pte. Ltd.BROEN-LAB A/S BROEN-LAB GmbH BROEN-LAB Sverige AB broen-lab .comINTERNATIONAL OFFICESUnit 9 Navigation Point, Golds Hill Way Tipton • West Midlands DY4 OPY • U.K.Tel. +44 121 522 4515 • Fax +44 121 522 4535E-mail:*****************10 Bukit Batok Crescent #10-02 • The Spire • Singapore 658079Tel: +65 6298 0662 • Fax: +65 6298 0468 E-mail:*****************HEAD OFFICE Drejervænget 2 • DK-5610 AssensTel. +45 6376 6376 • Fax +45 6471 2476 E-mail:*****************Tel. +45 6376 6376 • Fax +45 6471 2476 E-mail:*****************Tel. +45 6376 6376 • Fax +45 6471 2476 E-mail:*****************BROEN-LAB A/S ISO 9001 certificationIn September 1991 BROEN-LAB A/S was certified according to ISO 9001 as one of the first Danishcompanies. The certification was carried out by Bureau Veritas, Denmark, for our Danish site in Assens.The quality management system of BROEN-LAB A/S now complies with detailed specifications laid down by the internationally acknowledged EN ISO 9001:2008. This certification will further contribute to reputationfor quality and reliability of BROEN-LAB A/S.94G0243 UK 109/12-2020。
plc 实验室调试 强制 标准
plc 实验室调试强制标准
PLC实验室调试强制标准可以参考以下步骤:
1. 确保PLC程序已经写入并测试过。
2. 在调试之前,确保PLC处于停止(Stop)模式,并使用“在线—调试—强制运行”功能强制程序执行。
3. 调试过程中,需要检查每一步程序的执行情况,包括输出、输入信
号的状态,以及设备动作是否符合预期。
4. 如果需要强制某个软元件(例如Y0)接通,可以将光标定位在该软元件上,然后点菜单栏的“在线—调试—软元件测试”。
5. 在软元件测试窗口中,如果软元件显示Y000,表示该软元件已经接通。
6. 如果需要强制某个输出信号为特定状态(例如接通或断开),可以
在输出信号的程序段中选择相应的输出信号,然后使用“在线—调试—强制ON”或“在线—调试—强制OFF”功能进行强制。
7. 在调试过程中,需要注意安全问题,避免短路或强弱电混合到一起。
8. 调试完成后,需要将PLC恢复到正常工作模式,并按照生产工艺进
行最后的调整和优化。
qdebug的使用
qdebug的使用qDebug()是Qt框架中用于输出调试信息的函数,类似于C++中的cout函数。
它可以用于在控制台输出调试信息,帮助开发者跟踪程序的执行流程和调试问题。
使用qDebug()函数的方法很简单,只需要在其括号内输入要输出的内容即可。
例如:```cppqDebug() << "Hello, world!";```这将在控制台输出"Hello, world!"。
qDebug()还支持一些格式化输出,例如输出变量的值、格式化字符串等。
例如:```cppint x = 10;qDebug() << "x = " << x;```这将在控制台输出"x = 10"。
qDebug()还支持一些特殊的格式化输出,例如输出Qt的QString类型。
例如:```cppQString str = "Hello, Qt!";qDebug() << str;```这将在控制台输出"Hello, Qt!"。
需要注意的是,qDebug()输出的信息通常只在调试模式下可见,而在发布模式下会被忽略。
因此,在发布程序时,需要将qDebug()的输出关闭,以避免产生不必要的输出。
可以通过在程序的入口处添加以下代码来实现:```cppQLoggingCategory::setFilterRules(QStringLiteral("work.ssl.warning=false") );qSetMessagePattern("%{if-debug}debug%{endif}%{if-info}info%{endif}%{if-warni ng}warning%{endif}%{if-critical}critical%{endif}%{if-fatal}fatal%{endif}");```。
Rockwell Automation ControlLogix 10-槽I O机械式控制站说明书
This workstation is intended for customers who want to practice those job tasks that are not frequently performed on the plant floor. The workstation is designed to be used as an aid for strengthening and maintaining skill sets.
Training Workstation
ControlLogix Workstation – No Motion and No Controller (10-slot cHARDWARE • 1 EtherNet/IP module • 1 ControlNet
Allen-Bradley, ControlLogix, expanding human possibility and Studio 5000 Logix Designer are trademarks of Rockwell Automation, Inc. Trademarks not belonging to Rockwell Automation are property of their respective companies.
Publication GMST10-PP169G-EN-E –February 2020 | Supersedes Publication GMST10-PP169F-EN-E – January 2017 Copyright © 2020 Rockwell Automation, Inc. All Rights Reserved. Printed in USA.
遗传算法解决简单优化问题的实例

//: 本程序用遗传算法求函数F(x)= x * x 在区间[0,255]上的最大值//:遗传算法用到了轮盘赌选择算法、单点交叉算法、单点变异算法//:欢迎批评指正!Em ail:523192573@Q Q.com关同学#inc lude<iost ream>#inc lude<ioma nip>#incl ude <ctime>#in clude <cst dlib>usin g nam espac e std;#d efine DEBU G//#undef DEBU Gco nst i nt CH ROMOS OME_L ENGTH = 8; //染色体长度是8位(8bit)type def s truct INDI VIDUA L{int c hromo some[CHROM OSOME_LENG TH]; // 基因型i nt fi tness; // 适应度} I ndivi dual;voi d Gen erate Initi alPop ulati on(vo id);voidSelec t(voi d);v oid C rosso ver(v oid);void Muta te(vo id);voidEncod e(int x, i nt *c hromo some);int Dec ode(c onstint *chrom osome);vo id Ca lcula teFit ness(void);voi d Cop yIndi vidua l(Ind ividu al *d est,const Indi vidua l *so urce);voi d Swa pIndi vidua l(Ind ividu al *a, Ind ividu al *b);in t Fi ndBes tIndi vidua l(voi d);i nt F indWo rstIn divid ual(v oid);doub le Ca lcula teAve rageF itnes s(voi d);v oid P rintO utlin eInfo(intgener ation Count);vo id Pr intPo pulat ion(i nt ge nerat ionCo unt);//全局变量int p opula tionS ize = 30; // 种群规模i nt ma xGene ratio n = p opula tionS ize / 2; // 最大世代数doubl e pc= 0.6; // 交叉概率d ouble pm = 0.08; // 变异概率In divid ual *popul ation; // 种群// 主函数in t mai n(voi d){Gene rateI nitia lPopu latio n();#ifd ef DE BUGCalcu lateF itnes s();// Pr intPo pulat ion(0);P rintO utlin eInfo(0);#endi f //DEBUGfo r (in t i=1; i<=maxGe nerat ion;i++){Calcu lateF itnes s();Sel ect();C rosso ver();M utate();#ifdef DEBU G//Prin tPopu latio n(i);Pr intOu tline Info(i);#endif // D EBUG}Calcu lateF itnes s();intbest= Fin dBest Indiv idual();cout<< po pulat ion[b est].fitne ss << endl;d elete popu latio n;}// 产生初始种群void Gene rateI nitia lPopu latio n(voi d){popu latio n = n ew In divid ual[p opula tionS ize];if(popu latio n ==NULL){cout << "Alloc ate m emory fail ed!"<< en dl;exit(0);}s rand((unsi gned)time(NULL)); //时间作为随机数的种子fo r (in t i=0; i<p opula tionS ize;i++){int t = ra nd()% 256;E ncode(t, p opula tion[i].ch romos ome);//popul ation[i].f itnes s = t * t;}}//计算种群中所有个体的适应度v oid C alcul ateFi tness(void){for (int i=0; i<popu latio nSize; i++){int t =Decod e(pop ulati on[i].chro mosom e);popu latio n[i].fitne ss =t * t;}}//选择操作void Sele ct(vo id){//求出种群所有个体的适应度之和doub le fi tness Sum = 0.0;for (int i=0; i<po pulat ionSi ze; i++)fitn essSu m +=popul ation[i].f itnes s;// 计算累积概率dou ble *cumul ative Proba bilit y = n ew do uble[popul ation Size];cu mulat ivePr obabi lity[0] =popul ation[0].f itnes s / f itnes sSum;for (int i=1; i<po pulat ionSi ze; i++)cumu lativ eProb abili ty[i] = cu mulat ivePr obabi lity[i-1]+pop ulati on[i].fitn ess / fitn essSu m;// 申请新的内存空间以便用来存放选择出来的个体Indi vidua l * n ewPop ulati on =new I ndivi dual[popul ation Size];if (new Popul ation == N ULL){cout<< "A lloca te me moryfaile d!" << end l;exit(0);}// 用轮盘赌算法从当前种群中选择个体并c opy到n ewPop ulati on中srand((uns igned)time(NULL));for (int i=0; i<popu latio nSize; i++){dou ble p ointe r = r and() % 1001 /(doub le)1000;intk = 0;w hile(poin ter > cumu lativ eProb abili ty[k])k++;Cop yIndi vidua l(&ne wPopu latio n[i], &pop ulati on[k]);}//删除旧的popul ation,把选择出的个体组成新的种群dele te po pulat ion;popu latio n = n ewPop ulati on;// 删除存放累积概率的数组cumul ative Proba bilit yde letecumul ative Proba bilit y;}// 交叉操作v oid C rosso ver(v oid){sr and((unsig ned)t ime(N ULL));// 重排种群中个体的顺序,模拟随机配对过程fo r (in t k=0; k<p opula tionS ize/2; k++) //配对次数等于种群规模除以2 {i nt i= ran d() % popu latio nSize;i nt j= ran d() % popu latio nSize;i f (i!= j){Sw apInd ividu al(&p opula tion[i], &popul ation[j]);}} // for//相邻两个个体以交叉概率pc进行单点交叉for(inti=0;i<pop ulati onSiz e-1;i+=2){doub le p= (do uble)(rand() %100)/ 100;i f (p<= pc){i nt po s = r and() % CH ROMOS OME_L ENGTH;for (; pos<CHRO MOSOM E_LEN GTH;pos++){intt = p opula tion[i].ch romos ome[p os];p opula tion[i].ch romos ome[p os] =popu latio n[i+1].chr omoso me[po s];po pulat ion[i+1].c hromo some[pos]= t;}// fo r} // i f} // f or}// 变异操作v oid M utate(void){srand((uns igned)time(NULL));for(inti=0;i<pop ulati onSiz e; i++){do ublep = r and() % 1000 /(doub le)1000;if (p <=pm){intpos = rand() %CHROM OSOME_LENG TH;pop ulati on[i].chro mosom e[pos] ^=1; //异或可以使特定位翻转}}}//编码染色体void Enco de(in t x,int *chrom osome){for (int i=CHRO MOSOM E_LEN GTH-1; i>=0; i--){ch romos ome[i] = x % 2;x/= 2;}}//解码染色体intDecod e(con st in t *ch romos ome){in t res ult = 0;intt = 1;fo r (in t i=C HROMO SOME_LENGT H-1;i>=0; i--){resu lt += chro mosom e[i]* t;t <<= 1;}retur n res ult;}//复制个体void Copy Indiv idual(Indi vidua l *de st, c onstIndiv idual *sou rce){fo r (in t p=0; p<C HROMO SOME_LENGT H; p++){de st->c hromo some[p] =sourc e->ch romos ome[p];}des t->fi tness = so urce->fitn ess;}//交换两个个体vo id Sw apInd ividu al(In divid ual *a, In divid ual *b)intt;for (int p=0; p<CHRO MOSOM E_LEN GTH;p++){t = a->chr omoso me[p];a->chr omoso me[p] = b->chro mosom e[p];b->chro mosom e[p]= t;}t = a->fitn ess;a->f itnes s = b->fit ness;b->fitne ss =t;}// 找到最好的个体,返回它的下标i nt Fi ndBes tIndi vidua l(voi d){intbestI ndex= 0;for (int i=1; i<po pulat ionSi ze; i++)if (popul ation[i].f itnes s > p opula tion[bestI ndex].fitn ess)be stInd ex =i;r eturn best Index;}// 找到最差个体int F indWo rstIn divid ual(v oid){in t wor stInd ex =0;for (int i=1; i<popu latio nSize; i++)i f (po pulat ion[i].fit ness< pop ulati on[wo rstIn dex].fitne ss) wor stInd ex =i;r eturn wors tInde x;}// 计算种群的平均适应度doubl e Cal culat eAver ageFi tness(void){doubl e sum = 0;f or (i nt i=0; i<popul ation Size; i++)su m +=popul ation[i].f itnes s;retur n sum / po pulat ionSi ze;}//打印种群的概要信息(最佳个体适应度、最差个体适应度和平均适应度)vo id Pr intOu tline Info(int g enera tionC ount){c out << "Th e --" <<setw(2) << gene ratio nCoun t <<" --gener ation:" << endl;co ut << "Bes t in divid ual f itnes s = " <<popul ation[Find BestI ndivi dual()].fi tness << e ndl <<"Wors t ind ividu al fi tness = "<<po pulat ion[F indWo rstIn divid ual()].fit ness<< en dl << "Avera ge fi tness = "<< Ca lcula teAve rageF itnes s() << end l;}// 打印种群中的所有个体voidPrint Popul ation(intgener ation Count){cout<< "T he -- " << setw(2) << gen erati onCou nt << " -- gene ratio n:" << end l;f or (i nt i=0; i<popul ation Size; i++){cout << "chrom osome = ";fo r (in t k=0; k<C HROMO SOME_LENGT H; k++)cout << p opula tion[i].ch romos ome[k] <<' ';cou t <<"; ";cout << "value = "<< se tw(3) << D ecode(popu latio n[i].chrom osome) <<"; ";cout << "fitne ss =" <<setw(7) << popu latio n[i].fitne ss << endl;}}。
英特洛电棍筒控制卡调试方法
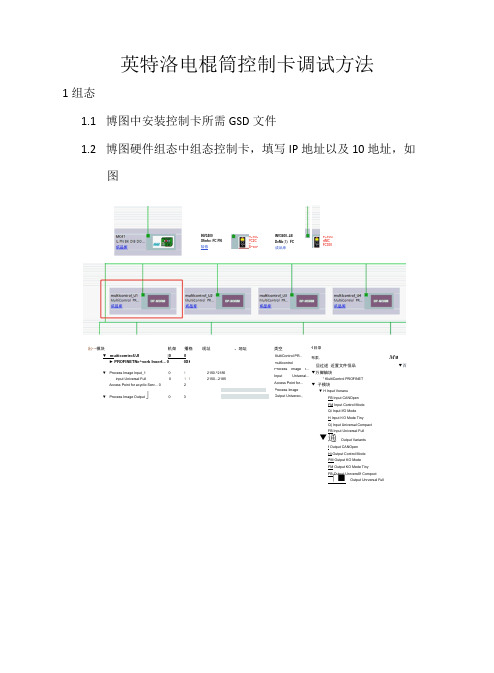
英特洛电棍筒控制卡调试方法1组态1.1博图中安装控制卡所需GSD文件1.2博图硬件组态中组态控制卡,填写IP地址以及10地址,如图INV3400..LBDeMo力FC成品库出…模块机架播格现址▼muiticcmtroUJI |0 0► PROFlNETNe^vork Inxerf... 0 0X1।▼Process Image lnput_1 0 1 2150.^2185 input Universal Full 0 1 1 2150 (2185)Access Point for acyclic Serv... 0 2▼Process Image Output」0 3 。
地址类空MultiControl PR...multicontrolProcess Image I...Input Univenal...Access Point for...Process ImageOutput Univereo.,布索, M M旦过逑近置文件恒品▼百▼万脚轴块" KlultiControl PROFINET▼ 子模块▼ H Input VonanuFB Input CANOpenFM Input Control ModeQi Input IfO ModeH Input h'O Mode TinyQ| Input Universal CompactFB Input Universal Full▼通Output Variantsf Output CANOpenHi Output Control ModePM Output KO ModeFM Output KO Mede TinyFB Output Unrvers®! Compoct「■Output Unrversal FullINV3400 Ofinfo» FC PN 陪修FC10CPC2CCFC30CFC10GrtMCFC3001目录《[川» 100%m FT T Y TV, <1<2I蚓三生上属性一工信息二&1&诊新常裁~正交量二 7境常. 文不"2分配设备名称给控制卡分配设备名称,操作方法同给10从站分配设备名称。
ESAB AUT-1012 PEK Process Controller 产品说明书

Adjustable sun shield for better visibility for outdoor use
Specifications
A2-A6 PEK Process Controller Connection voltage from the power source Connection power Motor connection adjusted for ESAB’s A2 and A6 motors Speed control Welding speed, ipm (m/min) Max. manual travel speed, ipm (m/min) Consumable wire feed speed, ipm (m/min) Valve output Inputs Connection to power source Max ambient temperature, °F (°C) Min ambient temperature, °F (°C) Relative humidity (of air) Dimensions, LxWxH, in. (mm) Weight, lbs. (kg) Enclosure class
Options & Accessories
I/O-Module...................................................... 0462080001 Set of connectors............................................ 0462119880 Cable restraining bracket................................. 0460861880
PLC调试工程师必备的个调试工具
PLC调试工程师必备的个调试工具PLC调试工程师必备的调试工具PLC(可编程逻辑控制器)调试工程师是负责开发和调试PLC系统的专业人员,他们在工作中需要使用各种调试工具来确保PLC系统的正常运行。
本文将介绍几种PLC调试工程师必备的调试工具,帮助他们更好地完成工作任务。
一、逻辑分析仪逻辑分析仪是PLC调试工程师必备的重要工具之一。
它能够对PLC系统的信号进行监测和分析,帮助工程师找出系统中可能存在的问题。
逻辑分析仪可以捕获和显示信号的时序图,使工程师能够清晰地了解信号的变化过程。
通过分析这些时序图,工程师可以判断PLC 系统是否正常工作,以及是否存在信号冲突或传输错误等问题。
二、模拟器模拟器是另一个PLC调试工程师必备的调试工具。
它能够模拟PLC系统中各个输入和输出设备的工作状态,使工程师能够在电脑上进行虚拟的调试和测试。
通过模拟器,工程师可以快速定位和解决PLC系统中的问题,而无需实际连接和操作硬件设备。
模拟器还能够提供实时的监测和反馈功能,帮助工程师更好地理解系统的运行原理和逻辑。
三、编程软件编程软件是PLC调试工程师必备的另一种调试工具。
不同厂家的PLC系统通常使用不同的编程语言和开发环境,因此工程师需要根据具体PLC系统的要求选择相应的编程软件。
编程软件具有编写、编辑和调试PLC程序的功能,能够帮助工程师更好地掌握系统的逻辑和功能。
通过编程软件,工程师可以对PLC程序进行修改和优化,并及时调试和测试程序的正确性和稳定性。
四、信号发生器信号发生器是PLC调试工程师常用的调试工具之一。
它能够产生各种不同的电信号和脉冲信号,用于模拟和测试PLC系统的输入和输出信号。
通过信号发生器,工程师可以模拟输入信号的变化和干扰,以及输出信号的响应和处理过程,从而检验PLC系统的稳定性和可靠性。
信号发生器通常配备有多种输出方式和参数调节功能,使工程师能够根据具体情况进行灵活的调试和测试。
五、测量仪器测量仪器是PLC调试工程师不可或缺的调试工具之一。
PLINE 1610电源电压抖动、故障和波动测试仪商品说明书
Voltage dips Interruptions VariationsThe solution for EMC tests toEN/IEC 61000-4-11EN 61000-4-11EN 50082-1EN 50082-2 Expandable to coverEN/IEC 61000-4-8Voltage dips and short interrup-tions are caused by faults in thenetwork or by sudden large load changes. Two or more consecu-tive dips or interruptions mayoccur due to changes in the loadwith time. Voltage variations arecaused by continuously varyingloads connected to the network.THE2PC I NSI DE3EMCFor ease of use, the PLINE 1610 is controlled by a built in computer, this enhances user flexibility by providing:•Pre-defined tests for the standards •Program and test storage•Simplified software updates using the RS232 interface•Time-stamped test protocols and recalibration info •Possibility to name tests and protocol headers •Remote control from external PC.PLINE 1610 has two integrated variable transformers (variacs).One transformer is used to adjust the nominal voltage in the range 0 to (Vin+10%) up to maximum 250 V . A second transformer responds to program-med inputs and adjusts the Dip voltage or slow variation voltage.The two variacs solution enables:•testing to lower mains voltages (115V) without having to change the supply voltagesimulators, increase the power and flexibility of his system still further.TWO VARI ACS ADVANTAGES•Ensure totally reproducible (mains quality independent) test results•No overtesting or undertesting of the EUT•No external voltage source and wiring is required. •Plug & Play.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Example
macro.c color.c
macro.c
#include <stdio.h> #define PRINT_ERROR(MSG) \ printf("Error [ %s : line %d in function:%s() ] \"%s\"\n", \ __FILE__, __LINE__, __func__, (MSG)) int main(int argc, char **argv){ int i = 0; // do something if (i == 0) PRINT_ERROR("i == 0"); return 0; }
Example
Can be used for debugging!
#include <stdio.h> #define DEBUG int main(int argc, char **argv){ #ifdef DEBUG printf("Something useful for debugging\n"); #endif return 0; }
Define Marco At Compile Time
#include <stdio.h> int main(int argc, char **argv){ #ifdef DEBUG printf("Debugging turned on\n"); #endif return 0; }
debug.c
Another Useful Macro
Macro to print integer, for example
#include <stdio.h> #define PRINT_INT(x) \ printf(#x " = %d\n", (x)); int main(int argc, char **argv){ int i = 123; // do something PRINT_INT(i); PRINT_INT(1+2); return 0; }
Example
macro3.c
#include <stdio.h> #define THIS_PROFESSOR_IS_GOOD int main(void){ #ifdef THIS_PROFESSOR_IS_GOOD printf("Is Good :) \n"); #else printf("Not Good :( \n"); #endif return 0; }
CO004 Projects on Operating Systems
Debug Basics
Outline
Predefined macros Useful macros Conditional Compilation
Predefined Macros
Try this!
printf("Line: %d\n", __LINE__); printf("File: %s\n", __FILE__); printf("Function: %s\n",__func__);
Conditional Compilation
Use #ifdef / #else / #endif Same set of code can be compiled to slightly different program For debugging For compiling into different version, according to different version of compiler/different target OS
Preprocessor replaces them into the corresponding value
More Macros
When you compile the program __DATE__ become the date __TIME__ become the time It is done by the preprocessor during compile time.
More About Color
\033[31;1m and \033[0m is a ANSI escape code 31 means “red” and 1 means “bold” 0 means “reset” Replace 31 with the following code to give Marco At Compile Time
#include <stdio.h> int main(int argc, char **argv){ #ifdef DEBUG printf("Debugging turned on\n"); #endif return 0; }
debug.c
color.c
#include <stdio.h> #define PRINT_ERROR_RED(MSG) \ printf("\033[31;1m" "Error [ %s : line %d in function:%s() ] \"%s\"\n" "\033[0m", \ __FILE__, __LINE__, __func__, (MSG)) int main(int argc, char **argv){ int i = 0; // do something if (i == 0) PRINT_ERROR_RED("i == 0"); return 0; }
Reference
/wiki/ANSI_escape_code /wiki/C_preprocessor /onlinedocs/cpp/Macros.html /~scs/cclass/notes/sx9.html Google