TCT40-16T.R1规格书
超声波传感器
第1讲 超声波传感器的特性
测距离
第1讲 超声波传感器的特性
第1讲 超声波传感器的特性
测料位
第1讲 超声波传感器的特性
B扫描超声成像技术
第1讲 超声波传感器的特性
美国的维吉尼亚级潜艇
超声波探头按其工作原理可分为压电式、磁致伸缩式、电磁式等,其
中以压电式最为常用。压电式超声波探头常用的材料是压电晶体和压电陶
瓷,这种传感器统称为压电式超声波探头。 它是利用压电材料的压电效应 来工作的。 压电效应有正向压电效应和逆向压电效应。 超声波发送器是利用逆向压电效应制成——即在压电元件上施加电压, 元件就变形(也称应变)引起空气振动产生超声波,超声波以疏密波形式 传播,传送给超声波接收器。
超声波对液体、固体的穿透本领很大,尤其是在阳光不透明的
固体中,它可穿透几十米的深度。超声波碰到杂质或分界面会 因此超声波检测广泛应用在工业、国防、生物医学等方面 。
产生显著反射形成反射回波,碰到活动物体能产生多普勒效应。
第1讲 超声波传感器的特性
第1讲 超声波传感器的特性
压电式超声波传感器的基本工作原理
子的形状、尺寸、数量、 介质的性质和散射粒子的性质有关。
吸收衰减是由于介质粘滞性,使超声波在介质中传播时造 成质点间的内摩擦,从而使一部分声能转换为热能,通过热传 导进行热交换,导致声能的损耗。
第1讲 超声波传感器的特性
(二) 超声波传感器的特性 3.1 频率特性
接收超声波
发送超声波
第1讲 超声波传感器的特性
第1讲 超声波传感器的特性
超声波传感器
第1讲 超声波传感器的特性
(一) 超声波传感器的原理及结构
利用超声波在超声场中的物理特性和各种效应而研制的装置 称为超声波传感器、探测器或换能器,也称为探头。
超声波传感器的特性

❖ ③ 表面波:质点的振动介于横波与 纵波之间,沿着介质表面传播,其振幅
压电式超声波传感器的基本工作原理
❖
超声波传感器按原理划分有压电式、 磁致伸缩式、 电
磁式等等, 其中压电式最常用,我们以压电式为代表重点介绍
。
❖
人们利用压电材料的压电效应制成压电式超声波传感
器(由发送器和接收器构成)。
❖
压电效应有正向压电效应和逆向压电效应。
❖
超声波传感器是可逆元件。
❖
超声波发送器是利用逆向压电效应制成——即在压电元
件上施加电压,元件就变形(也称应变)引起空气振动产生超
声波,超声波一疏密波形式传播,传送给超声波接收器。
❖
而超声波接收器是利用正向压电效应制成——即接收到
的超声波促使接收器的振子随着相应频率进行振动,由于存在
❖ 注意:要求测试每对数据时,要求先用示
实训1:超声波传感器的特性测试
表1:测试超声波传感器的幅频特性
f ( kHz ) 30K VPP ( V ) f ( kHz ) 37.5K VPP ( V )
f ( kHz ) 42.5K VPP ( V )
31K 32K 33K 38K 38.5K 39K 43K 43.5K 44K
❖ 步骤3:固定发射头与接收头的间距为
实训1:超声波传感器的特性测试
信号发生器示波器源自发射头 T接收头 R探头
实训1:超声波传感器的特性测试
❖ 二、测试超声波传感器的幅频特性:
❖ 步骤1:调节信号发生器输出方波信号的 峰峰VPP 值为10V,本测试要保证输出幅度恒 定的情况下进行。
❖ 步骤2:调节方波信号的频率,使其在 30K~49K范围内变化,用示波器观察超 声波接收头的输出信号波形,记下的值。 请按照如下表格设置的频率数据要求进行 测试,总计测试30对数据。
智能小车控制系统的设计分析

摘要随着自动控制技术的迅速发展,自动化技术已广泛应用于国计民生的各行各业。
智能汽车就是自动化技术发展的重要成果之一。
本文介绍了智能小车的研究设计背景与现状及其各个工作模块的工作原理、硬件及软件设计。
本设计中的自动循迹模块采用光电传感器循迹方法,选用RPR220型红外一体式发射接收管作为光电传感器,通过三组光电传感器识别小车的运行姿态。
避障模块利用超声波测距传感器,超声波发射部分的换能器选用TCT40-16T,接收部分选用TCT40-16R,在小车的左前右分别安装一组测距传感器实现避障功能。
设计遥控模块对小车进行启停及加减速控制,通过光电编码实现对小车的测速功能。
设计显示模块从而实时了解小车的运行状态。
选用包含H桥的L298N模块,利用PWM驱动小车行驶。
关键字:循迹,避障,遥控,显示,测速,PWM驱动ABSTRACTWith the rapid development of automatic control technology, automation technology has been widely used in various industries of the national economy and the people’s livelihood. Smart car is one of the important results of the development of automation technology. This article describes the design background and current situation of the intelligent car and the working principle, hardware and software design of the car’s modules.The automatic tracking of this design uses photoelectric sensor tracking method, and we choose RPR220 as the photoelectric sensor, which integrate the infrared transmitting and receiving tubes, three sets of photoelectric sensor distinguish the car’s running posture. Obstacle avoidance module utilizes ultrasonic distance sensor. We choose TCT40-16T as the emitting portion of the ultrasonic transducer and TCT40-16R as the receiving portion. Three distance measuring sensors are respectively fixed on the front, left and right of the car to achieve the obstacle avoidance function. Design remote control to control the start,stop,acceleration and deceleration of the car, and we utilize the optical-electricity encoder to realize the car’s speed measuring function. Design the display module to know the real-time of the car. Choose the L298N module which contains the H-bridge and utilize the PWM to drive the intelligent car running.KEYWORDS:tracking, obstacle avoidance, remote control, display, speed measurement, PWM driving目录摘要(中文) (1)摘要(外文) (2)1 绪论 (1)1.1 设计背景与意义 (1)1.2 当前国内外的研究设计现状及成果 (2)1.2.1 国外研究现状及成果 (2)1.2.2 我国研究现状及成果 (3)1.3 本设计的内容及结构 (4)1.3.1 设计内容 (4)1.3.2 本文结构 (5)2 智能小车控制系统的设计原理 (7)2.1、智能小车自动循迹原理 (7)2.1.1 小车循迹原理 (7)2.1.2 光电传感器工作原理 (8)2.1.3 光电传感器的常用类型 (9)2.2 超声波测距避障原理 (9)2.3 智能小车测速原理 (12)2.3.1直流电机测速 (12)2.3.2 光电码盘测速 (14)2.4 智能小车遥控原理 (15)2.4.1 红外遥控的实现模块 (15)2.4.2 红外遥控的工作原理 (15)2.5 智能小车的电机驱动电路工作原理 (16)3 智能小车控制系统的硬件电路图设计 (17)3.1 智能小车的电源模块设计 (17)3.2 智能小车自动循迹的硬件电路设计 (18)3.2.1 循迹传感器选择 (18)3.2.2 循迹电路图设计 (19)3.3 智能小车超声波测距的硬件电路设计 (20)3.3.1 超声波发射部分的硬件电路设计 (20)3.3.2 超声波接收部分的硬件电路设计 (20)3.4 智能小车数码显示的硬件电路设计 (21)3.4.1 LED数码显示器的结构与显示段码 (21)3.4.2 LED数码显示器的显示方法 (23)3.4.3 数码显示的硬件设计 (23)3.5 智能小车遥控的硬件电路设计 (24)3.5.1 智能小车的遥控发射模块硬件设计 (24)3.5.2 智能小车的遥控接收模块硬件设计 (25)3.6 智能小车电机驱动的硬件电路设计 (26)3.6.1 智能小车的电机驱动芯片选择 (26)3.6.2 智能小车的电机驱动电路的设计 (27)3.7 智能小车整体的硬件电路设计 (27)4 智能小车控制系统的软件设计 (29)4.1 主程序设计 (29)4.2 自动循迹模块程序设计 (30)4.3 测距避障模块程序设计 (2)4.4 数码显示模块程序设计 (3)4.5 编码测速模块程序设计 (4)4.6 红外遥控模块程序设计 (5)总结............................................... 错误!未定义书签。
超声波测距倒车雷达方案选择说明

方案选择说明超声波测距主要应用于倒车雷达、建筑施工工地以及一些工业现场,例如:液位、井深、管道长度等场合。
目前国内一般使用专用集成电路设计超声波测距仪,但是集成电路的成本很高,并且没有显示操作使用不方便。
本文介绍AT89S52单片机为核心的低成本、高精度、微型化数字显示超声波测距仪的硬件电路和软件设计方法.实际证明该仪器工作稳定,性能良好.系统总体方案的设计本系统由超声波发射、回波信号接收、温度测量、显示和报警、电源等硬件电路部分以及相应的软件部分构成。
系统原理框图,如图1所示。
整个系统由单片机AT89S52控制,超声波传感器采用收发分体式,分别是一支超声波发射换能器TCT40-16T和一支超声波接收换能器TCT40-16R.超声波信号通过超声波发射换能器发射至空气中,遇被测物反射后回波被超声波接收换能器接收。
进行相关处理后,输入单片机的INT0脚产生中断,计算中间经历的时间,同时再根据具体的温度计算相应的声速,根据式(2)就可得出相应的距离用来显示,当然在一些场合也可根据需要,设置距离报警值.倒车报警器主要依据是超声波测距,以AT89S51单片机为核心设计出方案1.超声波测距原理超声波测距是通过不断检测超声波发射后遇到障碍物所反射的回波,从而测出发射和接收回波的时间差t,然后求出距S=Ct/2,式中的C为超声波波速.由于超声波也是一种声波,其声速C与温度有关,表1列出了几种不同温度下的声速。
在使用时,如果温度变化不大,则可认为声速是基本不变的。
如果测距精度要求很高,,则应用通过温度补偿的方法加以校正。
声速确定后,只要测得超声波往返的时间,即可求得距离.这就是超声波测距的机理。
表1 声速与温度关系表2.AT89S52的功能特点AT89S52是一个4K字节可编程EPROM的高性能微控制器。
它与工业标准MCS—51的指令和引脚兼容,因而是一种功能强大微控制器,它对很多嵌入式控制应用提供一个高度灵活有效的解决方案,AT89S52具有以下特点:4K字节的EPROM,128字节RAM、32根I/O口线、2个16位定时器/计数器、5个向量二级中断结构、1个全双向串行口、并且内含精密模拟比较器和片内扩展器,具有4。
课程设计--超声波倒车雷达测距
课程设计设计题目超声波倒车雷达测距目录摘要 (4)第一章绪论 (4)1.1 背景 (4)1.2 目前研究现状分析 (4)1.3 拟解决的关键问题 (4)第二章课程设计目的 (4)第三章课程设计正文 (4)3.1 系统分析 (4)3.2 总体设计 (5)3.3 原理图设计 (9)3.4 软件程序设计 (11)第四章调试方案 (10)第五章项目小组分工 (12)第六章课程设计总结 (12)参考文献 (13)附件1:项目原理图附件2:源程序摘要目前,单片机已经渗透到了我们生活的方方面面。
本系统基于AT89S52单片机,利用超声波模块进行距离的探测,将所测得信号交给单片机进行处理,由1602液晶显示模块进行显示,同时将感应出是否有人体接近。
在危险距离之内还有报警音提示,使模型小车避开障碍物。
关键词:单片机、超声波测距、报警、壁障1绪论:题目:超声波倒车雷达测距1.1背景:倒车雷达的快速发展始于20世纪末21世纪初,经过几年的时间,随着技术发展和用户需求的变化,倒车雷达在几年的时间里大致经过了六代的演变。
第一代:倒车时通过喇叭提醒。
“倒车请注意”!这就是倒车雷达的第一代产品,只要司机挂上倒档,它就会响起。
第二代:采用蜂鸣器不同声音提示驾驶员。
倒车雷达系统的真正开始。
倒车时,如果车后1.8m~1.5m处有障碍物,蜂鸣器就会开始工作。
担对驾驶员帮助不大。
后来又有:数码波段显示具体距离或者距离范围、液晶屏动态显示等。
担这些倒车系统在使用的过程中都有一定的缺陷,汽车尾部与后车轮之间的空间都普遍成了探测的盲区,致使汽车在倒车时都会受到不同程度的刮伤、碰撞等,这是广大爱车族们所不愿意看到的。
1.2目前研究现状分析目前国内做倒车雷达的厂家很多,但是性能都不是很理想,普遍存在倒车雷达探测声波波束较窄,当障碍物偏离探头的正对角度时,存在较大的探测盲区。
对管锥状障碍物探测存在较多的死角。
另外,探测低矮的障碍物也比较困难,高度在50cm以下的障碍物就探测不到了,在很大程度上不能满足广大车主的需求。
超声波测距离

摘要本设计利用STC89C52单片机、超声波传感器实现利用超声波进行测距。
利用蜂鸣器和发光二极管表示传感器探测范围内是否有障碍物,当在探测范围内有障碍物时,发光管发光和蜂鸣器发出声音。
为了保证超声波测距传感器的可靠性和稳定性,采取了相应的抗干扰措施。
就超声波的传播特性,超声波换能器的工作特性、超声波发射、接收、超声微弱信号放大、波形整形、速度变换、语音提示电路及系统功能软件等做了详细说明。
实现障碍物的距离测试、显示和报警,超声波测距范围7CM-500CM,精度在1厘米左右。
这套系统软硬件设计合理、抗干扰能力强、实时性良好,经过系统扩展和升级,可以用于倒车雷达、建筑施工工地以及一些工业现场。
关键词:STC89C52;超声波;传感器AbstractThis design using STC89C52 microcontroller, ultrasonic sensors are realized by ultrasound. Using the buzzer and light-emitting diodes sensor range that there are obstacles, when in detecting worldwide obstacle, shine and tube production sound. In order to guarantee the ultrasonic range-finding sensors, the stability and reliability of the correspondinganti-jamming measures. Will the propagation characteristics of ultrasonic, ultrasonic transducer operating characteristics, ultrasound, receiving, ultrasonic weak signal waveform plastic, and velocity transformation, audio circuits and functions of the system software to do a detailed explanation. Realize that the distance test, obstacles and alarm, ultrasonic ranging 7CM scope, accuracy in 500CM - 1 centimeter or so. The system hardware and software design is reasonable, strong anti-jamming ability, good real-time, expansion and upgrade system, can be used in radar, construction site back and other industrial field.Key words:STC89C52;Ultrasonic; Sensors目录引言 (1)1 超声波简介 (1)1.1 超声波 (1)1.2 压电式超声波传感器简介 (1)1.3 超声波传感器特性 (2)1.3.1频率特性 (2)1.3.2指向特性 (4)2 超声波测距原理 (5)3 系统硬件结构设计 (5)3.1 系统总体设计 (5)3.2 单片机的选择和性能介绍 (7)3.3 超声波发射电路的方案比较、设计与论证 (9)3.4 超声波接收电路的方案比较、设计与论证 (10)4 系统软件设计 (12)4.1 软件设计的总体结构框图 (12)4.2 主流程图 (12)4.3 超声波发生子程序和超声波接收中断程序 (13)5 系统调试分析 (14)5.1 硬件调试 (14)5.2 调试结果 (15)5.3 误差分析 (15)总结 (16)谢辞 (17)参考文献 (18)引言目前一般都采用波在介质传播速度和时间关系进行测量。
汽车防碰撞报警系统毕业论文

毕业论文课题:汽车防碰撞报警系统摘要论文介绍了一种基于单片机的超声波汽车防撞测距报警系统,此系统利用AT89S52单片机作为主控制器,结合超声波测距原理,来实现智能汽车防撞测距报警功能,并进行了系统硬件和软件的设计。
通过多种发射接收电路设计方案比较,得出了最佳的设计方案,并对系统各个单元的原理进行了介绍。
对组成的各系统电路的芯片进行了介绍,并阐述了它们的工作原理。
此系统具有结构简单,精度高,使用方便等特点。
介绍了系统软件结构,通过编程来实现系统功能。
AbstractPaper describes a microcontroller-based ultrasonic ranging automotive anti-collision warning system, this system uses AT89S52 microcontroller as the main controller, combined with ultrasonic distance measurement principle, to achieve the smart car crash ranging alarm, and make the system hardware and software design. Through a variety of transmitting and receiving circuit design compared to arrive at the best design, and system the principle of each unit are described. Circuit composed of the various systems on a chip was introduced, and explained how they work. This system has a simple structure, high precision, easy to use and so on. Describes the system software architecture, programmed to achieve system functionality.目录摘要 (II)Abstract (III)目录 (IV)第1章绪论 (1)1.1 背景 (1)1.1.1 超声波测距发展综述 (1)1.2 研究内容 (2)第2章超声波测距原理及构想 (3)2.1 超声波传感器介绍 (3)2.1.1 超声波传感器的特性 (4)2.2超声波测距的原理 (5)2.3系统设计原理 (5)2.4系统主要参数 (7)2.4.1 测距仪的工作频率 (7)2.4.2声速 (7)2.4.3 发射脉冲宽度 (7)2.4.4 测量盲区 (7)第3章超声波测距系统方案设计 (9)3.1 发射与接收电路的设计方案 (9)3.2 显示报警单元方案设计 (10)3.2.1系统报警电路设计 (11)3.3 单片机复位电路 (11)3.4 时钟电路 (12)3.5 温度补偿电路 (13)3.6 74HC04N芯片介绍 (14)3.7 探头介绍 (14)第4章系统软件结构 (15)第5章结论 (17)5.1 误差产生原因分析 (18)5.1.1 温度对超声波声速的影响 (18)5.2 针对误差产生原因的系统改进方案 (19)致谢 (21)参考文献 (22)附录1 原理图 (24)附录2源代码 (25)附录3 电子器件列表清单 (30)第1章绪论1.1 背景随着社会经济的发展,交通运输业日益兴旺,汽车的数量在大副攀升。
超声波测距
1 绪论超声测距是一种利用单片机控制超声波的轮流发射,并且通过单片机记录和读取发射超声波和接收回波的时间差,进而计算出测量的距离。
由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物理定位仪等都可以通过超声波来实现。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面达到很高的要求。
目前超声波测距已得到广泛应用,国内一般使用专用集成电路根据超声波测距原理设计各种测距仪器,但是专用集成电路的成本较高、功能单一。
而以单片机为核心的测距仪器可以实现预置、多端口检测、显示、报警等多种功能,并且成本低、精度高、操作简单、工作稳定可靠。
本文主要论述了利用5l系列单片机实现超声波测距的原理以及实现的方法。
该智能距离提示器主要是利用超声波探测传感器发送超声波来测试相对应的距离。
工作时,超声波发生器不断的发出一系列连续的脉冲,并给单片机提供一个短脉冲。
超声波遇障碍物反射回来一个反射波,这个反射波被超声波接收器收到,也向单片机提供一个短脉冲。
最后由单片机装置对接受信号依据时间差进行处理,自动计算出该智能距离提示器离障碍物之间的距离。
该超声波智能距离提示器具有硬件结构简单、工作可靠、测量误差小、方便等特点。
因此它不仅可以单单用作距离测量,还可以放在其它检测系统中。
随着科学技术的快速发展,超声波将在测距仪中的应用越来越广。
这是一个正在蓬勃发展而又有无限前景的技术及产业领域。
超声波测距是一种极有潜力的测距方法,近距范围内超声测距有其不受光线影响,结构简单,成本低等特点。
超声波测量的另一个突出优点是:环境介质可以为空气,液体或固体,适用范围广泛。
更重要的是超声波检测降低了劳动强度,避免工人在恶劣工作环境下(高,低温,强辐射等)受到伤害,还大大提高了测量精度,可靠性高;另外,超声波测距还可以应用到其他的功能系统中,例如在机器人避障系统;移动机器人避障的超声测距系统,智能机器人管家和简易智能电动车自动避障系统;自动刹车系统和倒车雷达系统,液位测量系统中超声波测距也有其重要的应用。
TCT40-10T.R1规格书
Fax:86-512-69136596-1000
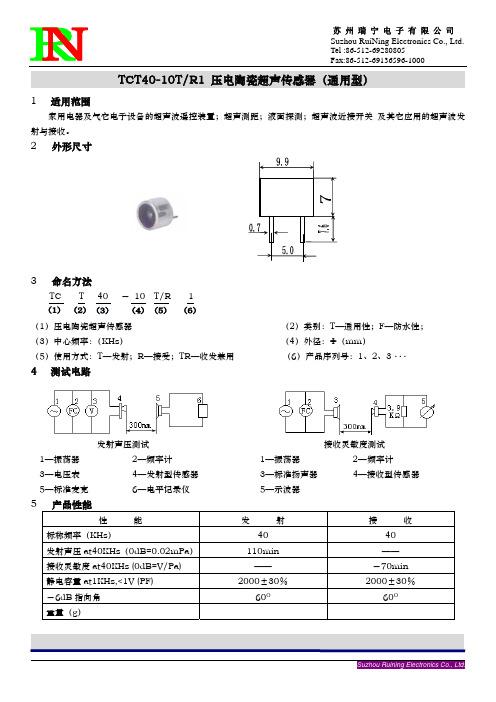
TCT40-10T/R1 压电陶瓷超声传感器(通用型)
1适用范围
家用电器及气它电子设备的超声波遥控装置;超声测距;液面探测;超声波近接开关 及其它应用的超声波发射与接收。
2 外形尺寸
3 命名方法
TC T 40 - 10 T/R 1
(1)压电陶瓷超声传感器 (2)类别:T—通用性;F—防水性;
(3)中心频率:(KHz) (4)外径:Φ(mm)
(5)使用方式:T—发射;R—接受;TR—收发兼用 (6)产品序列号:1、2、3···
4测试电路
发射声压测试 接收灵敏度测试
1—振荡器 2—频率计 1—振荡器 2—频率计
3—电压表 4—发射型传感器 3—标准扬声器 4—接收型传感器
5—标准麦克 6—电平记录仪 5—示波器
5产品性能
性 能 发 射 接 收 标称频率(KHz) 40 40
发射声压at40KHz(0dB=0.02mPa)110min ——
接收灵敏度at40KHz (0dB=V/Pa) —— -70min
静电容量at1KHz,<1V (PF) 2000±30% 2000±30%
-6dB指向角 60O 60O
重量(g)
TCT40-10T/R1发射声压指向特性图。
(完整版)传感器选用原则
传感器选用原则现代传感器在原理与结构上千差万别,如何根据具体的测量目的、测量对象以及测量环境合理地选用传感器,是在进行某个量的测量时首先要解决的问题。
当传感器确定之后,与之相配套的测量方法和测量设备也就可以确定了。
测量结果的成败,在很大程度上取决于传感器的选用是否合理。
1)根据测量对象与测量环境确定传感器的类型要进行—个具体的测量工作,首先要考虑采用何种原理的传感器,这需要分析多方面的因素之后才能确定。
因为,即使是测量同一物理量,也有多种原理的传感器可供选用,哪一种原理的传感器更为合适,则需要根据被测量的特点和传感器的使用条件考虑以下一些具体问题:量程的大小;被测位置对传感器体积的要求;测量方式为接触式还是非接触式;信号的引出方法,有线或是非接触测量;传感器的来源,国产还是进口,价格能否承受,还是自行研制。
在考虑上述问题之后就能确定选用何种类型的传感器,然后再考虑传感器的具体性能指标。
2)灵敏度的选择通常,在传感器的线性范围内,希望传感器的灵敏度越高越好。
因为只有灵敏度高时,与被测量变化对应的输出信号的值才比较大,有利于信号处理。
但要注意的是,传感器的灵敏度高,与被测量无关的外界噪声也容易混入,也会被放大系统放大,影响测量精度。
因此,要求传感器本身应具有较高的信噪比,尽员减少从外界引入的厂扰信号。
传感器的灵敏度是有方向性的。
当被测量是单向量,而且对其方向性要求较高,则应选择其它方向灵敏度小的传感器;如果被测量是多维向量,则要求传感器的交叉灵敏度越小越好。
3)频率响应特性传感器的频率响应特性决定了被测量的频率范围,必须在允许频率范围内保持不失真的测量条件,实际上传感器的响应总有—定延迟,希望延迟时间越短越好。
传感器的频率响应高,可测的信号频率范围就宽,而由于受到结构特性的影响,机械系统的惯性较大,因有频率低的传感器可测信号的频率较低。
在动态测量中,应根据信号的特点(稳态、瞬态、随机等)响应特性,以免产生过火的误差4)线性范围传感器的线形范围是指输出与输入成正比的范围。
基于51单片机的汽车倒车雷达设计
基于51单片机的汽车倒车雷达设计LT第一章绪论1.1 课题设计的目的和意义随着汽车的普及,越来越多的家庭拥有了汽车。
交通拥挤状况也随之出现,撞车事件也是经常发生,人们在享受汽车带来的乐趣和方便的同时,更加注重的是汽车的安全性,许多“追尾”事故都与车距有着密切的关系。
为了解决这个安全问题,设计一种汽车测距防撞报警系统势在必行。
由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
利用超声波检测往往比较迅速、方便、计算简单。
所以超声波测距法是一种非常简单常见的方法,应用在汽车停车的前后左右防撞的近距离测量,以及在汽车倒车防撞报警系统中,超声波作为一种特殊的声波,具有声波传输的基本物理特性—折射,反射,干涉,衍射,散射。
超声波测距是利用其反射特性,当车辆后退时,超声波测距传感器利用超声波检测车辆后方的障碍物位置,并利用LED显示出来,当到达一定距离时,系统能发出报警声,进而提醒驾驶人员,起到安全的左右。
通过本课题的研究,将所学到的知识用在实践中并有所创新和进步。
该设计可广泛应用在生活、军事、工业等各个领域,它需要设计者有较好的数电、模电知识,并且有一定的编程能力,综合运用所学的知识实现对超声波发射与接收信号进行控制,通过单片机程序对超声波信号进行相应的分析、计算、处理最后显示在LED数码管上。
1.2 国内应用现状近年来,由于导航系统、工业机器人的自动测距、机械加工自动化等方面的需要,自动测距变得十分重要。
与同类测距方法相比,超声波测距法具有以下优势:(1)相对于声波,超声波有定向性较好、能量集中、在传输过程中衰减较小、反射能力强等优势。
(2)和光学方法相比,超声波的波速较小,可以直接测量较近的目标,纵向分辨率高;对色彩、光照度、电磁场不敏感,被测物体处于黑暗、烟雾、电磁干扰、有毒等比较恶劣的环境有一定的适应能力。
特别是在海洋勘测具有独特的优点。
基于超声波汽车防撞指南
摘要随着科学技术的快速发展,超声波将在科学技术中的应用越来越广。
本文对超声波传感器测距的可能性进行了理论分析,利用模拟电子、数字电子、微机接口、超声波换能器、以及超声波在介质的传播特性等知识,采用以STC89C52单片机为核心的低成本、高精度、微型化数字显示超声波测距的硬件电路和软件设计方法在此基础上设计了系统的总体方案,最后通过硬件和软件实现了各个功能模块。
为了保证超声波测距传感器的可靠性和稳定性,采取了相应的抗干扰措施。
就超声波的传播特性,超声波换能器的工作特性、超声波发射、接收、超声微弱信号放大、波形整形、速度变换、语音提示电路及系统功能软件等做了详细说明.实现障碍物的距离测试、显示和报警,超声波测距范围30CM-300CM,精度在十厘米左右。
这套系统软硬件设计合理、抗干扰能力强、实时性良好,经过系统扩展和升级,可以用于倒车雷达、建筑施工工地以及一些工业现场,例如:测量液位、井深、管道长度等场合。
可以广泛应用于工业生产、医学检查、日常生活、无人驾驶汽车、自动作业现场的自动引导小车、机器人、液位计等。
关键词: STC89C52,超声波,传感器,LCD,测量距离AbstractAlong with the science and technology fast development, the ultrasonic wave more and more will be broad in the science and technology application .This article has carried on the theoretical analysis to the ultrasonic sensor range finder possibility, the use simulation electron, the digital electron, the microcomputer connection, the ultrasonic wave transducer, as well as the ultrasonic wave in medium knowledge and so on dissemination characteristic, uses take STC89C52monolithic integrated circuit as the core low cost, the high accuracy, the microminiaturized numeral demonstrated the ultrasonic wave distance gauge the hardware electric circuit and the software design method has designed the system overall concept in this foundation, finally has realized each function module through the hardware and the software.Key words: STC89C52, ultrasonic wave, sensor, LCD, Measuring distance桂林电子科技大学毕业设计报告用纸目录1 引言 (1)1.1 课题背景 (1)1.2 课题设计的意义: (1)1.3 超声波测距在汽车上应用的介绍: (1)2 课题的方案设计与论证 (3)2.1 系统总体设计 (3)2.2 设计方案的论证 (5)3 系统的硬件结构设计 (6)3.1 单片机的选择 (6)3.2 发射电路的设计 (11)3.3 接收电路的设计 (15)4 系统软件的设计 (22)4.1 超声波汽车防撞电路的算法设计 (23)4.2 主程序流程图 (24)4.3 超声波发生子程序和超声波接收中断程序 (26)5 调试 (28)5.1 硬件调试 (28)5.2 软件调试 (29)总结 (31)致谢 (33)附录1: (35)附录2: (37)附录3: (39)1 引言1.1 课题背景随着经济的发展与汽车科学技术的进步,公路交通呈现出行驶高速化、车流密集化和驾驶员非职业化的趋势。
超声波传感器在汽车倒车系统中的应用
超声波传感器在汽车倒车系统中的应用
超声波传感器在汽车倒车系统中的应用近年来随着微电子技术发展而产生的小型价廉的微处理器(单片机)的出现,使超声波测距传感器的功能得到了提升。
有了微处理器不仅使测距的精度大为提高,而且为超声波测距技术的应用开辟更大的空间。
超声波测距的工作原理人能听到的声音频率为:20Hz~20kHz,即为可听声波,超出此频率范围的声音,即20Hz以下的声音称为低频声波,20kHz以上的声音称为超声波。
超声波是一种只有少数生物(如蝙蝠、海豚)才能感觉的机械波,其频率在20kHz以上,波长短,绕射小、能定向传播。
超声波为直线传播方式,频率越高,绕射能力越弱,但反射能力越强。
为此,利用超声波的这种性能就可制成超声波传感器。
超声波测距的原理就是利用超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:
s=340t/2 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Fax:86-512-69136596-1000
TCT40-16T/R1 压电陶瓷超声传感器(通用型)
1适用范围
家用电器及气它电子设备的超声波遥控装置;超声测距;液面探测;超声波近接开关 及其它应用的超声波发射与接收。
2 外形尺寸
3 命名方法
TC T 40 - 16 T/R 1
(1)压电陶瓷超声传感器 (2)类别:T—通用性;F—防水性;
(3)中心频率:(KHz) (4)外径:Φ(mm)
(5)使用方式:T—发射;R—接受;TR—收发兼用 (6)产品序列号:1、2、3···
4测试电路
发射声压测试 接收灵敏度测试
1—振荡器 2—频率计 1—振荡器 2—频率计
3—电压表 4—发射型传感器 3—标准扬声器 4—接收型传感器
5—标准麦克 6—电平记录仪 5—示波器
Fax:86-512-69136596-1000
TCT40-16T/R1 压电陶瓷超声传感器(通用型)
TCT40-16T/R1指向特性图
6 环境特性6.1 温度特性
在-30℃~+85℃的温度范围内,发射声压及灵敏度(在中心频率下)与初始值相比的变化,不大于6dB。