基于自抗扰技术的PMSM无位置传感器优化控制
基于自抗扰控制的船舶永磁电机无位置传感器混合控制
基于自抗扰控制的船舶永磁电机无位置传感器混合控制#陈再发!2,刘彦呈1,庄绪州1(1.大连海事大学 轮机工程学院,辽宁 大连2.浙江国际海运职业技术学院,浙江 舟山116026;316021)摘 要:无位置传感器控制是船舶电力推进系统可靠性的重要保障。
针对目前没有单一算法能够实现的无位置传感器控制,一基 抗扰的无位置传感器混合控制策略。
对电机零、低速区域采用高频电流注入法估算转子位置,对于中、高速区域采用扩展反电动势(EMF )法估算转子位置,并将2种估算方到同一控制, 计电流内环的自抗扰控制器,器实性能的位置估计, 针对2 的合 方案。
的 性性,为船舶推进内置式永磁电机(IPMSM )无位置传感器控制。
关键词:内置式永磁同步电机;船舶电力推进系统;自抗扰控制;无位置传感器控制;混合控制中图分类号:TM341文献标志码:6文章编号:1673-6540(2020) 10-0024-09doi : 10.12177/e>?.2020.117Position Sensorless Hybrid Control of Marine Permanent Magnet Synchronous Motor Based on Active Distrrbance Rejection Control *收稿日期:2020-06-19;收到修改稿日期:2020-08-02*基金项目:舟山市公益类科技计划项目(2017C33110);浙江省基础公益研究计划项目(LGG20E070001)作者简介:陈再发(1982-),男,博士,副教授,研究方向为永磁电机控制技术。
刘彦呈(1963-),男,博士,教授,博士生导师,研究方向为机电一体化、智能电气与控制网络。
庄绪州(1989-),男,博士,研究方向为智能电气控制与网络。
CHEN Zaifa 1,2, LIU Yancheng 1, ZHUANG Xuzhou 1(1. Marine Engineering College ,Dalian Maritime University ,Dalian 116026,China ;2. Zhejiang Internationai Martime College ,Zhoushan 316021,China )Abstract : Position sensorless controi is an importani guarantee fos the reliability of marine electric propulsionsystem. There ic no single algorithm that can realize sensorless control in the whole speed range at preseni. In view ofthio fa?, a novee position sensorless hybrid control strateey based on active disturbanco rejection control ( ADRC) isproposed. High frequence current injection method is used to estimate the rotoo position in zero and low speed reeions. In medium and high speed reeions ,the extended back electromotive force ( EMF) method is used to estimatethe rotOT position. The two estirnation schemes are integated int 。
基于SMO的PMSM无位置传感器调速控制系统的设计
验分析 , 该系统能够很好 的完成对转子位置和转速 的估算 , 对 提高系统可靠 性及控制精度 、 降低 系统 复杂性及 系统成本 具
有 重 要 的 现实 意义 。
关键 词 : 永磁同步电动机 ; 无位置传感器 ; 滑模 观测器 ; 空 间矢量脉宽调制
中图分类号 : T M3 4 1 文献标识码 : A 文章编号 : 1 6 7 2 — 4 8 0 1 ( 2 0 1 4 ) 0 5 — 0 9 0 — 0 3
转子位置信号 , 位置传感 器须精确安装且妥善维 护。但位置传感器存在连接线脱落和系统干扰等 问题 , 可能造成系统故障甚至事故 , 增大了系统 的 故障率 , 降低 了系统的适应能力 , 增加 了系统的运
行成本 , 使 永 磁 同 步 电机 调 速控 制 系 统 的应 用 受 到 限制 。 因此 , 研究 无 位 置 传感 器 的永 磁 同 步 电
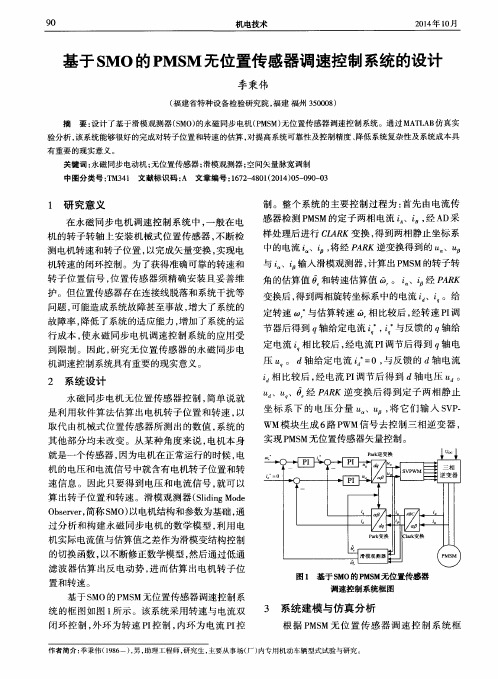
WM模 块 生 成 6 路P WM信 号 去 控制 三 相 逆 变 器 , 实现P MS M无位 置传 感器 矢量 控制 。
机 的电压和电流信号中就含有电机转子位置和转
速信息 。因此 只要得到电压和电流信号 , 就可以
算 出转 子位 置 和转 速 。滑 模 观 测器 ( S l i d i n g Mo d e
O b s e r v e r , 简称S MO) 以电机结 构 和参数 为基 础 , 通 过 分 析 和 构 建 永磁 同步 电机 的数 学 模 型 , 利 用 电
机实际电流值与估算值之差作为滑模变结构控制 的切换函数 , 以不断修正数学模型 , 然后通过低通 滤波器估算 出反电动势 , 进 而估算 出电机转子位
2 系统 设 计
永磁 同步 电机无位置传感器控制 , 简单说就
基于自适应EKF的PMSM无速度传感器控制
NI in h a YAN igj g E Ja — u , Jn —n i
( c o l f Elcrc lEn n e ig a d I f r S h o etia giern n n o mat n, h i ie st f o i An u v ri o o Un y
jd et emo o vn tt ,o ttcpo esa dd n mi p o e st r u so aa tr r ie o g h trmo ig sae frsa i r c s n y a c rc s wog o p fp rmeesweegv n t u
转矩脉 动小等优 点得 到了广泛应 用 。在 高性 能永
磁 同步 电 机 控 制 系 统 中 , 不 开 精 确 的 速 度 信 息 , 离
强的鲁棒 性 , 无 法克 服 由于开 关 切换 造成 的抖 但
振 问题 ; 献 [] 忽 略 电机 转 动惯 量 的情 况 下 , 文 6在
但是高 精度 、 分辨 率 的速 度 传感 器 不仅 价 格 昂 高
电 气 传 动 2 1 0 1年 第 4 1卷 第 3期
ELE CTRI C DRI 2 1 Vo . 1 No 3 VE O1 14 .
基 于 自适 应 E KF的 P M 无 速 度 传 感 器 控 制 MS
聂 建 华 , 婧 婧 燕 ( 徽 工业 大 学 电气信 息学 院, 徽 马鞍 山 23 0 ) 安 安 4 0 0
1 引 言
永磁 同步电机 以其转矩 惯量大 、 速范 围宽 、 调
且还 带来 了转速 和转矩 脉 动 ; 献 r ] 文 献 [ ] 文 4及 5 提 出了基于 滑模 观测 器 的 方法 , 方 法 中的 滑模 该
基于扰动转矩观测器PMSM无位置传感器控制系统
换相成为最近电机控制领域研究的热点[3-4]。 目前针对 PMSM 无位置传感器控制算法主要
有:龙伯格控制算法[5]、卡尔曼控制算法[6]、滑模控 制算法[7]、定子磁链估计器算法[8]等。定子磁链估 计器算法是一种基于电压模型的定子磁链估计
基金项目:国家科技支撑计划资助项目(2015BAA03B01) 作者简介:阴建强(1974—),男,硕士,高级讲师,Email:yh2002h@ 通讯作者:杨沛豪(1993—),男,硕士,工程师,Email:yangpeihao@
为了提高 PMSM 无位置传感器低速控制性 能,文献[9]提出一种基于电流模型的定子磁链估 计器,但是该估计器依赖于转子位置信息,无法实 现全转速范围无传感器控制。文献[10]采用高频 信号注入法提取电机转子位置信息,但是一般控 制系统中没有单独设置电流、电压环,高频电压、 电流信号难以控制,很大程度上影响了控制精度。
Abstract: The sensorless control of PMSM based on control algorithm is a research hotspot in the field of motor control. A PMSM sensorless control system based on low-speed pulse and high-frequency stator flux injection was proposed,and the traditional stator flux estimator was improved and the high-frequency signal was introduced into the low-pass filter to improve the accuracy of the stator flux estimator when the motor is running at low speed. In view of the fact that the sensorless control system is easily affected by torque ripple when PMSM is running at medium and low speed,the disturbance torque observer was used to suppress the voltage error caused by the torque disturbance. The effectiveness and feasibility of the proposed scheme were verified by experiments.
基于模糊自抗扰的PMSM无速度传感器控制
( . 南 大 学 电气 与 信 息 工 程 学 院 , 南 长 沙 1湖 湖
摘
要 : 永磁 同步 电机 ( ema e t g e y c rn u trP M) 速度 传 感 在 p r n n n t n h o o smo o , MS 无 ma s
器控制 系统 中 , 为提 高 系统 的鲁棒 性和 自适 应 能力 , 出 了新 型 自抗扰 P M 控制 方案 . 提 MS 在 实际应 用 中, 对 自抗扰 控制 器 ( RC 参数 不 便 于 实 际操 作 和 整 定 , 针 AD ) 引进 模 糊 控 制 , 合 结
2 De to lcr na dCo . p fE e to n mmu iain E gn eig Ch n s aUnv。 a g h l n n 4 0 0 Chn ) nc t n iern . a g h i Ch n s a o Hu a 1 0 3。 ia Ab ta t I d rt mpr v hes s e r bus n s n d p i e a lt n t e ma ntma e yn sr c .n or e o i o e t y t m o t e sa d a a tv biiy i he p r ne gn ts —
各 自的特 点 , 出 了一 种基 于模糊 控制 原理 的 改进 型 自抗扰 控 制 算 法. 系统 内、 给 视 外扰 动 的
总和 为 系统 的未知扰 动 量 , 新型 自抗扰 控 制 器 来 实现 P M 的无 速 度 传 感 器控 制. 真 用 MS 仿
表 明 , 不 同的转速 下 , 在 系统表 现 出很 强 的 自适 应 能 力和 对 系统扰 动 良好 的 鲁棒 性 , 且 具 并 有 高精度 的转速 估计 . 实验验 证 了此控 制策 略在 永磁 同步 电机 控制 领域 的 可行性 和优 越 性.
PMSM无位置传感器矢量控制速度调节器参数选定
作者简介:
伍嘉伟(1994-),
男,
硕士研究生,
Email:
aaronens@
Copyright©博看网 . All Rights Reserved.
3
伍嘉伟,
等:
PMSM 无位置传感器矢量控制速度调节器参数选定
电气传动 2018 年 第 48 卷 第 8 期
是除了直接计算法估算转子位置之外,绝大部分
的位置估算算法都存在一个共同的问题,就是估
算信息与实际信息之间会存在一定的滞后,这种
滞后会减小系统的稳定裕度,影响调节器参数的
稳定范围。
本文通过分析转速估算滞后的影响因素,将
估算模块以一种输入为实际转速、输出为估算转
ELECTRIC DRIVE 2018 Vol.48 No.8
电气传动 2018 年 第 48 卷 第 8 期
PMSM 无位置传感器矢量控制速度
调节器参数选定
伍嘉伟,李海春,尹泉
(华中科技大学 自动化学院,
湖北 武汉 430074)
摘要:针对无位置传感器算法在速度估算时的滞后导致系统稳定裕度变小的问题,提出一种输入为实际
转速、输出为估算转速的等效模型来替代估算模块用以构建等效估算速度闭环矢量控制系统。基于该等效系
统求出速度调节器参数的稳定范围,合理选定可以使系统稳定运行的参数。采用一种基于永磁同步电机
(PMSM)的扩展反电动势模型的全阶滑模观测器来估算电机的位置与速度信息,通过这种估算算法验证提出
方法的可行性。仿真和物理实验结果验证了所提出的估算速度闭环等效方法的有效性。
loop vector control system. The stability range of the speed regulator parameters could be found out based on this
基于全阶自适应的PMSM无速度传感器抗扰控制
z3( t)
b
(21)
基于全阶自适应的永磁同步电机无速度传感器
抗扰控制框图如图 1 所示ꎮ
式中:P n 为电机极对数ꎬ此时ꎬ转矩电流给定值 i ∗
q
可表示为:
= i′q +^i q
i∗
q
^ r ) +k i
-ω
式中:i′q = k p( ω∗
r
∫ (ω
∗
r
(16)
^ r ) dtꎮ
-ω
3 自抗扰控制器设计
Key words:permanent magnet synchronous motorꎻfull order adaptive observerꎻauto disturbance rejection controlꎻ
load disturbance observerꎻfeed ̄forward compensation
=A
(3)
dt
é Rs
ê-
ê L
^=ê s
式中:A
êω
^
ê e
ë
^ e ùú
-ω
éê ψ f ^ ùú
ú
- ωe
ú ꎬd = ê L s ú ꎮ
Rs
êê
úú
- ú
ë 0 û
L s úû
^ 矩阵包含估计变量信息ꎬx^ 为原系统变
际变量 ω e ꎬA
^ 代替原系统的 A 矩阵ꎮ
量的重构值ꎬ即用重构的 A
模型参数ꎬ但是其算法复杂ꎬ硬件实现有一定难度ꎻ
安装相对复杂、维护困难、增大系统体积、降低系统
全阶自适应观测器具有结构简单、易于实现、便于计
ꎮ 为
算、通用性强等优点而受到广泛关注ꎮ 但该方法对
自抗扰和新型滑模观测器的PMSM_无传感器控制
第37卷第6期2023年11月兰州文理学院学报(自然科学版)J o u r n a l o fL a n z h o uU n i v e r s i t y ofA r t s a n dS c i e n c e (N a t u r a l S c i e n c e s )V o l .37N o .6N o v .2023收稿日期:2023G03G26作者简介:高俊岭(1966G),女,安徽凤台人,副教授,硕士,研究方向为电力电子与电力传动.E Gm a i l :603618156@q q.c o m.㊀∗通信作者:黄豪磊(1998G),男,河南淮阳人,在读硕士,研究方向为永磁电机控制.E Gm a i l :2436001906@q q.c o m.㊀㊀文章编号:2095G6991(2023)06G0041G05自抗扰和新型滑模观测器的P M S M 无传感器控制高俊岭,黄豪磊∗,张㊀磊,田㊀琳(安徽理工大学电气与信息工程学院,安徽淮南232001)摘要:针对中高速情况下,带有滑模控制器的传统控制方法存在动态响应慢㊁抖振较大㊁转子转速及位置信息估计精度差等问题,设计一种自抗扰控制结合新型滑模观测器的控制策略.速度环采用自抗扰速度控制器改善系统的动态响应速度和抗扰性能;新型滑模观测器采用边界层厚度随转子速度动态可调的正弦输入函数作为切换函数,有效抑制了观测器抖振;基于反电动势模型设计反电动势观测器,省去了低通滤波器,提高了转速和转子位置的估计精度.通过仿真实验验证了本文方法的有效性和可行性.关键词:P M S M ;无传感器控制;自抗扰控制器;新型滑模观测器中图分类号:TM 351㊀㊀㊀文献标志码:AS e n s o r l e s sC o n t r o l o fP M S M B a s e do nA c t i v eD i s t u r b a n c eR e j e c t i o na n dN e wS l i d i n g Mo d eO b s e r v e r G A OJ u n Gl i n g ,HU A N G H a o Gl e i ∗,Z HA N GL e i ,T I A N L i n (S c h o o l o fE l e c t r i c a l a n d I n f o r m a t i o nE n g i n e e r i n g,A n h u iU n i v e r s i t y o f S c i e n c e a n dT e c h n o l o g y,H u a i n a n232001,A n h u i ,C h i n a )A b s t r a c t :A i m i n g a t t h e p r o b l e m s o f t r a d i t i o n a l c o n t r o lm e t h o d sw i t h s l i d i n g mo d e c o n t r o l l e r s s u c ha s s l o wd y n a m i c r e s p o n s e ,l a r g e c h a t t e r i n g ,a n d p o o r e s t i m a t i o n a c c u r a c y o f r o t o r s p e e d a n d p o s i t i o n i n f o r m a t i o n a tm e d i u ma n d h i g h s p e e d s ,a c o n t r o l s t r a t e g y b a s e d o n a u t o d i s t u r b Ga n c e r e j e c t i o n c o n t r o l a n d an e ws l i d i n g m o d e o b s e r v e r i s d e s i g n e d .T h e s p e e d l o o p a d o pt s a n a u t od i s t u r b a n c er e j e c t i o ns p e e dc o n t r o l l e rt o i m p r o v et h ed y n a m i cr e s p o n s es p e e da n dd i s Gt u r b a n c e r e j e c t i o n p e r f o r m a n c e o f t h e s y s t e m.T h e n e ws l i d i n g m o d e o b s e r v e r u s e s a s i n u s o i d Ga l i n p u t f u n c t i o nw h o s e b o u n d a r y l a y e r t h i c k n e s s i s d y n a m i c a l l y a d j u s t a b l ew i t h r o t o r s pe e d a s a s w i t c h i n gf u n c t i o n ,e f f e c t i v e l y s u p p r e s s i ng th e o b s e r v e r c h a t t e ri n g .T h e b a c k e l e c t r o m o t i v e f o r c e o b s e r v e r i s d e s i gn e db a s e do n t h eb a c ke l e c t r o m o t i v e f o r c em o d e l ,w h i c he l i m i n a t e s t h e l o w Gp a s s f i l t e r a n d i m p r o v e s t h ee s t i m a t i o na c c u r a c y o f r o t a t i o n a l s pe e da n dr o t o r p o s i t i o n .T h e ef f e c t i v e n e s s a n d f e a s i b i l i t y a r e v e r i f i e d t h r o ug hs i m u l a t i o ne x pe r i m e n t s .K e y w o r d s :P M S M ;s e n s o r l e s sc o n t r o l ;a c t i v ed i s t u r b a n c er e j e c t i o nc o n t r o l l e r ;n e w s l i d i n g m o d e o b s e r v e r㊀㊀永磁同步电机(P e r m a n e n tM a g n e tS y n c h r o Gn o u sM o t o r ,P M S M )凭借高效率㊁结构简易等优势,在电动汽车㊁风机等领域获得了广泛应用[1].传统P M S M 普遍采用机械式传感器对转子信息进行检测,这种检测方法存在电机体积大㊁可靠性低等缺点,无传感器控制很好地解决了这些问题,诸多学者也一直致力于该领域的研究[2].目前,中高速无传感器控制主要有扩展卡尔曼滤波(E K F )[3]㊁滑模观测器(S MO )[4]和模型参考自适应(M R A S)[5]等方法.滑模观测器(S l i d i n g Mo d eO b s e r v e r ,S MO )法是一种使用非常广泛的控制策略,由于滑模控制器自身机制会引起严重的系统抖振,文献[6]采用分段指数型函数作为滑模切换函数,有效削弱了滑模抖振,提高了系统的电流响应,但低通滤波器的使用使相位存在一定的滞后性.文献[7]采用高阶滑模观测器观测转子信息,应用新型滑模控制器作为速度控制器,有效降低了系统抖振,获得了良好的控制效果,由于系统转速存在较大的超调量,导致转速估计精度不高.文献[8]设计了一种双滑模控制策略,对滑模速度控制器和观测器都进行了优化,有效缩短了系统的响应时间,降低了系统抖振,但该方法在一定程度上增加了系统的运算量.本文以i d =0的P M S M 矢量控制系统为研究对象,速度环采用自抗扰控制器(A c t i v eD i s Gt u r b a n c eD e je c t i o nC o n t r o l l e r ,A D R C )提高了系统的动态响应速度,增强了系统的抗扰能力.在满足L y a p u n o v 稳定性的条件下设计新型滑模观测器(N e w S l i d i n g M o d eO b s e r v e r ,N S MO ),从切换函数的角度降低了系统抖振,同时设计了一种可变边界层正弦输入函数;利用反电动势观测器对等效反电动势进行处理,有效避免了低通滤波器的使用及相位补偿问题.1㊀自抗扰速度控制器设计1.1㊀永磁同步电机的数学模型表贴式P M S M 在d ㊁q 坐标系下的数学模型为:d i d d t =1L s u d -R L s i d +ωr L sφq ,d i q d t =1L s u q -R L s i q +ωr L sφd ,d ωr d t =P n J T e -P n J T L -B ω,T e =3P n φfi q 2,ìîíïïïïïïïïïï(1)式中:u d ㊁u q 为定子电压d ㊁q 轴分量;i d ㊁i q 为定子电流d ㊁q 轴分量;L s 为定子电感;φf 为转子永磁体磁链;J 为转动惯量;T e 为电磁转矩;φd ㊁φq 分别为磁链的d ㊁q 轴分量;T L 为负载转矩;P n 为极对数;B ω为摩擦系数;ωr 为转子角速度;i q 为交轴电流;R 为定子电阻.1.2㊀速度环ADRC 设计自抗扰控制主要包括跟踪微分器(T D )㊁扩张状态观测器(E S O )和非线性误差反馈控制率(N L S E F ).为了减少计算量,速度环采用一阶A D R C .T D :e 1=z 11-w ∗,z11=-r 0f al e 1,α1,δ1().{(2)E S O :e 2=z 21-w ,z 21=z 22-β1f a l e 2,α21,δ21()+b u ,z 22=β2f a l e 2,α22,δ22().ìîíïïïï(3)N L S E F :e 3=z 11-z 21,u 0=kf a l e 3,α3,δ3(),u =u 0-z 22/b .ìîíïïïï(4)以上公式中:e 1㊁e 2㊁e 3为误差信号;α1㊁α21㊁α22㊁α3为跟踪因子;δ1㊁δ21㊁δ22㊁δ3为滤波因子;w ∗为T D 的输入信号;z 11为w ∗的跟踪信号;r 0为T D 的速度因子;β1㊁β2为E S O 输出误差校正增益;ω为输出信号;z 21为E S O 观测输出速度;z 22为扰动观测量;u 0为N L S E F 输出控制信号;k 为调节器增益;b 为补偿因子;u 是补偿后的输入信号;f al 代表非线性函数,其表达式为:f al e ,α,δ()=|e |αs gn e (),|e |>δ,e δα-1,|e |ɤδ.{(5)式中:s gn 为符号函数.2㊀新型滑模观测器设计式(1)中d ㊁q 坐标下的电流方程经反Pa r k 变换得到α㊁β静止坐标下的电流方程为:d i αd t =-R L s i α+1L s u α-e α(),d i βd t =-R L s i β+1L s u β-e β(),e α=-φf ωr s i n θ,e β=φfωr c o s θ,ìîíïïïïïïïï(6)式中:i α㊁i β为定子电流;u α㊁u β为定子电压;θ为转子位置角;e α㊁e β表示扩展反电势.由定子电流误差构建新型滑模观测器的结构模型如图1所示.2.1㊀新型滑模观测器利用电流误差构造滑模面为:s (x )=s αs βæèçöø÷=i ɡα-i αi ɡβ-i βæèççöø÷÷,(7)24㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀兰州文理学院学报(自然科学版)㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第37卷图1㊀新型滑模观测器结构式中:s α㊁s β为定子电流误差,i ɡα㊁i ɡβ表示定子电流估计数值.不同滑模函数设计的滑模观测器具有不同的观测效果,传统滑模观测器通常采用开关函数作为滑模切换函数,而开关函数存在严重的滑模抖振.为了减弱系统抖振,文献[9]采用边界层固定不变的饱和函数作为滑模函数,但固定边界层厚度会影响系统的收敛速度.因此,采用边界层随转速可调的正弦输入函数F (s )作为切换函数,用来削弱滑模抖振和满足高性能控制的需要,其表达式为:F s ()=s i n πs 2m æèçöø÷,s <m ,s i gn s (),s ȡm ,ìîíïïï(8)式中:m 为边界层厚度(正常数);s 为滑模面函数.F (s )的函数曲线如图2所示.图2中,F (s )在整个实数域内连续且在零点处的函数值为零,常数m 可以调节F s ()的陡度.边界层厚度m 1㊁m 2㊁m 3分别对应转速ω1㊁ω2㊁ω3.速度较高时,通常采用较小的边界层m ,此时对系统抖振的抑制较强,同理低速系统通常采用较大的边界层.因此,不同转速下的m 值可通过查表法获得.图2㊀F (s )函数曲线㊀㊀边界层厚度m 通过经验获得,在满足系统收敛性的同时要尽可能小[10].以300r /m i n ~1000r /m i n 转速范围为例,将这一范围划分为4个区间,不同区间的边界层m 如表1所列.本文取m =0.2,重新定义了边界层厚度.表1㊀不同转速下边界层厚度转速/(r m i n -1)3005008001000边界层厚度/mm0.850.650.500.45㊀㊀新型滑模观测器的模型设计为:d i ɡαd t =-R L s i ɡα+1L s[u α-K F s α()],d i ɡβd t =-R L s i ɡβ+1L s[u β-K F s β()],ìîíïïïïïï(9)式中:K 为常数,表示滑模增益.式(9)减去式(6)即可得到电流误差方程为:d s αd t =-R L s s α+1L s e α-1L sK F s α(),d s βdt =-R L s s β+1L s e β-1L s K F s β().ìîíïïïï(10)将式(10)简化为:sαβ=A s αβ+B e αβ-K F s αβ()(),(11)式中:A =-R/L s 00-R /L s æèçöø÷;电感矩阵B =1/L s 001/L s æèçöø÷;反电动势e s =e αe βæèçöø÷;s αβ=s αs βæèçöø÷.为了保证系统稳定,构造L y a pu n o v 函数为:V =12s T s =12s 2α+s 2β()=12s 2αβ.(12)根据L y a p u n o v 第二方法可知,只有V=s Tαβsαβ<0,才能保证系统稳定,即V=A s T αβs αβ+B s Tαβe s -K F s αβ()()<0,(13)式中,A s T αβs αβɤ0恒成立.为保证观测器稳定,滑模增益K 的设定范围为:K >m a x (|e α|,|e β|),即滑模增益K 应大于反电动势的最大幅值.2.2㊀反电动势观测器传统滑模观测器由于低通滤波器的使用会给系统带来相位延迟,且延迟角度的大小与电机实际转速及低通滤波器截止频率有关,估计精度较差.设计反电动势观测器不仅能够避免低通滤波器的使用和由此产生的相位补偿问题,简化系统,而且有效提高了转子位置和速度的估计精度.P M S M 的反电动势模型可表示为:d e αd t=-ωr e β,d e βd t=ωr e α.ìîíïïïï(14)由反电动势模型可以得到反电动势观测器设34第6期高俊岭等:自抗扰和新型滑模观测器的P M S M 无传感器控制计方程为:d d te ɡα=-ωɡr e ɡβ-h e ɡα-e α(),d d t e ɡβ=ωɡr e ɡα-h e ɡβ-e β(),d d tωɡr =e ɡα-e α()e ɡβ-e ɡβ-e β()e ɡα.ìîíïïïïïïïï(15)式中:h 为观测器增益;e ɡα㊁e ɡβ为反电势观测值;ωɡr为角速度估计值.式(15)减式(14)得反电动势观测器误差方程为:d d te ~α=-ω~r e ɡβ-ωr e ~β-h e ~α,d d t e ~β=ω~r e ɡα+ωr e ~α-h e ~β,d d tω~r =e ~αe ɡβ-e ɡαe ~β.ìîíïïïïïïïï(16)式中:e ~α=e ɡα-e α;e ~β=e ɡβ-e β;ω~r =ωɡα-ωα.通过分析观测器的稳定性,定义L y a p u n o v 函数为:V =12e ~2α+e ~2β+ω~2r ().(17)对式(17)求微分可得:V=e ~αe ~ α+e ~βe ~β+ω~r ω~ r.(18)将式(16)代入式(18),得:V=-h e ~2α+e ~2β().(19)因为h >0,则V<0,满足L y a pu n o v 稳定性条件,说明观测器满足稳定性和可达性.3㊀仿真实验与结果分析在M a t l a b /S i m u l i n k 中搭建自抗扰和新型滑模观测器的P M S M 控制系统仿真模型.系统整体框架如图3所示.图3㊀自抗扰和新型滑模观测器的P M S M 系统框架㊀㊀通过与传统滑模控制器(S l i d i n g Mo d eC o n Gt r o l l e r ,S M C )和观测器相结合的控制方法进行对比,验证自抗扰和新型滑模观测器的优越性.仿真所用的P M S M 主要电气参数如表2所列.表2㊀永磁同步电机主要参数参数数值直流侧电源电压u d c/V 311开关频率f s /k H z 10永磁体磁链φf /W b 0.175定子电感L s/mH 8.5定子电阻R /Ω2.875电机磁极对数P n43.1㊀加速和抗扰性能分析A D R C 和S M C 控制方法下的实际转速波形如图4所示.图4㊀A D R C 和S M C 实际转速波形㊀㊀由图4可知,与传统滑模控制器相比,自抗扰控制器在电机启动和突加转速时能够快速稳定于给定转速,响应速度更快,转速抖振几乎为零.在0.08s 突加5N m 负载时,传统滑模控制器的转速降落达到了95r /m i n ,恢复给定转速所需时间较长;而自抗扰控制器的转速降落仅为8r/m i n,转速波动较小.结果表明自抗扰控制器具有较好的动态性能和抗干扰能力.两种控制方法下的转速误差如图5所示.由图5可知,传统滑模观测器初始启动阶段的转速误差达到了10r /m i n ,当转速增加至1000r /m i n时,误差在-2~4r /m i n 之间波动,且突加转速或突加负载时误差都发生了较大波动;而新型滑模观测器在启动阶段的转速误差最大仅为0.12r /m i n ,当转速增加至1000r /m i n 时,误差在0 02~0.1r /m i n 之间波动,有效减小了转子转速的估计误差.44㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀兰州文理学院学报(自然科学版)㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第37卷图5㊀实际转速与估计转速误差3.2㊀观测器性能分析两种控制方法下的转子实际角度与观测角度曲线如图6所示.由图6可知,新型滑模观测器的转子位置跟踪效果明显优于传统滑模观测器.图6㊀滑模观测器实际角度与观测角度㊀㊀当转速为500r /m i n 时,传统滑模和新型滑模观测器的转子位置估计误差比较曲线如图7所示.由图7可知,传统滑模观测器得到的位置估计误差达到了0.026r a d ,并伴有高频抖振;而改进滑模观测器的位置估计误差仅为0.0105r a d ,有效削弱了抖振幅值并减小了转子位置估计误差.4㊀结语本文以表贴式P M S M 为研究对象,速度环采用A D R C 控制器,使系统在初始启动和加速过程中都能快速稳定,当负载突变时,抗干扰能力较强.新型滑模观测器利用边界层可调的正弦输入图7㊀传统S M O 和N S M O 转子位置估计误差函数,有效削弱了观测器抖振;通过反电动势观测器对反电动势进行提取,避免了低通滤波器的使用及由此带来的相位补偿问题,提高了系统的跟踪精度.参考文献:[1]申永鹏,刘安康,崔光照,等.扩展滑模观测器永磁同步电机无传感器矢量控制[J ].电机与控制学报,2020,24(8):51G57,66.[2]王丽,高远,袁海英.基于改进型S MO 的P M S M 无传感器鲁棒控制方法[J ].广西科技大学学报,2022,33(2):48G53,68.[3]Q U A N G N K ,H I E U N T ,HA Q P .F P G A Gb a s e d s e n s o r l e s sP M S M s p e e dc o n t r o lu s i n g re d u c e d Go r d e r e x t e n d e dK a l m a nf i l t e r s [J ].I E E E T r a n s a c t i Go n so n I n d u s t r i a l E l e c t r o n i c s ,2014,61(12):6574G6582.[4]L I A N GD ,L I J ,Q UR.S e n s o r l e s s c o n t r o l o f pe r m a Gn e n tm a g n e ts y n c h r o n o u s m a c h i n eb a s e do ns e c o n d Go r d e r s l i d i n gGm o d e o b s e r v e rw i t ho n l i n e r e s i s t a n c e e s Gt i m a t i o n [J ].I E E E T r a n s a c t i o n so n I n d u s t r y A p p l i c a Gt i o n s ,2017,53(4):3672G3682.[5]李京,王仲根,沈志俊,等.永磁同步电机双滑模无传感器矢量控制研究[J ].兰州文理学院学报(自然科学版),2022,36(4):47G52.[6]张立伟,李行,宋佩佩,等.基于新型滑模观测器的永磁同步电机无传感器矢量控制系统[J ].电工技术学报,2019,34(S 1):70G78.[7]杨浩,赵强,杨钊,等.基于新型双滑模的永磁同步电机无传感器矢量控制[J ].科学技术与工程,2022,22(6):2252G2258.[8]李凡,彭思齐,蒋雨函,等.基于改进的滑模控制器和观测器的S P M S M 控制[J ].控制工程,2022,29(9):1625G1630,1651.[9]仝兆景,郑权,韩耀飞,等.基于新滑模观测器的永磁同步电机无传感器控制[J ].电子科技,2021,34(12):1G6,41.[10]郑征,赵来阔.基于自适应滑模观测器的P M S M 无位置传感器研究[J ].武汉大学学报(工学版),2022,55(4):387G393,400.[责任编辑:李㊀岚]54第6期高俊岭等:自抗扰和新型滑模观测器的P M S M 无传感器控制。
基于自抗扰控制技术的PMSM-DTC控制
(1.School of Electrical Engineering, Dalian University of Technology, Dalian 116024, Liaoning, China; 2.State Grid Dalian Electric Power Supply Company, Dalian 116024, Liaoning, China)
摘要: 针对传统的永磁同步电机直接转矩控制 (DTC) 系统抗干扰性差、 开关频率不稳定以及磁链脉动大 的问题, 在基于开关表的直接转矩控制方法上进行改进, 引进空间电压矢量脉宽调制技术 (SVPWM) 和自抗扰 控制技术 (ADRC) 。仿真结果显示: 加入了自抗扰控制器以及空间电压矢量脉宽调制技术的永磁同步电机直 接转矩控制系统转矩脉动明显减小, 系统抗干扰性增强, 开关频率更加稳定。 关键词: 直接转矩控制; 自抗扰控制; 空间矢量脉宽调制 中图分类号: TM341; TM351 文献标识码: A DOI: 10.19457/j.1001-2095.20170704
ELECTRIC DRIVE 2017 Vol.47 No.7
电气传动 2017 年 第 47 卷 第 7 期
基于自抗扰控制技术的 PMSM-DTC 控制
马新宇 1, 庄海 1, 张颖杰 2, 崔磊 2 (1.大连理工大学 电气工程学院, 辽宁 大连 116024; 2.国网辽宁省有限公司大连供电公司, 辽宁 大连 116024)
作者简介: 马新宇 (1992-) , 女, 硕士, Email: maxinyu_92@
关频率和开关损耗增大, 降低系统运行效率。针 对以上问题, 本文在传统的直接转矩控制系统中 引入自抗扰控制技术 (ADRC) 以及空间电压矢量 脉宽控制技术 (SVPWM) 。
基于改进型SMO的PMSM无传感器鲁棒控制方法

0引言近年来,永磁同步电机(permanent magnet synchronous motor ,PMSM )调速系统广泛应用于纯电动汽车、机器人、工业传动等领域。
PMSM 控制系统普遍采用机械式传感器检测反馈电机的转子状态(速度和位置)信息,这不仅增加系统设备的安装维护成本和体积,而且传感器检测效果易受电磁、温度等因素干扰,对电机调速控制性能造成不良影响,甚至会出现传感器故障,导致控制系统失稳等问题[1]。
为提高PMSM 调速控制系统的容错能力,近年来,PMSM 无传感器控制技术备受关注。
针对PMSM 无传感器控制问题,提出了扩展卡尔曼滤波方法、模型参考自适应方法、滑模观测器(sliding mode observer ,SMO )方法等[2-4]。
传统的SMO 方法采用不连续的滑模面切换开关控制函数,使得PMSM 转子状态估计存在抖振效应,导致转子状态观测精度降低[5]。
为抑制或降低滑模抖振效应,提高转子状态估计精度和无传感器控制效果,有学者采用准滑模函数思想,在SMO 中引入饱和函数或分段指数函数等具有连续性的切换函数来替代传统的符号开关函数[6-7]。
文献[8]采用低通滤波加相位补偿的方法滤除高频抖振,同时对滤波导致的相位延迟进行补偿,然而该方法固定的滤波器截止频率和相位补偿环节无法适用于大范围调速且负载变化的无传感器控制情形。
近年来,有报道采用截止频率可变的滤波器或级联滤波器等对观测器输出进行高频抖振滤波,虽能滤除高次谐波和减小相位偏差,但截止频率和相位补偿值的调节律设计使方法变得复杂,计算量变大[9-10],且还存在相位延迟的补偿环节情况[11]。
现有的PMSM 无传感器控制系统大都采用速度环、电流环的双闭环比例积分(proportional inte ‐gral ,PI )矢量控制,虽然PI 控制器结构简单,但自适应能力不强,控制效果易受到估计误差、系统参数、外部负载等摄动干扰的影响,无法获得令人满意的电机控制动静态性能及鲁棒性[12]。
基于变结构自抗扰的车用PMSM模型预测控制

基于变结构自抗扰的车用PMSM模型预测控制高华鑫【摘要】为了满足电动汽车在驱动过程中对电机的控制精度及快动态响应的要求,研究一种基于变结构自抗扰控制的永磁同步电机模型预测电流控制策略.以模型预测电流控制为电流环,结合自抗扰控制和变结构控制的特点,构造变结构自抗扰速度控制取代传统的PI调节器.在保留常规自抗扰性能的同时,简化了参数整定,有效地提高了系统的控制精度和抗扰性能.利用李雅普诺夫理论证明了系统的渐近稳定性.通过仿真和实验验证了该方法的可靠性和有效性.【期刊名称】《计算机应用与软件》【年(卷),期】2018(035)006【总页数】6页(P83-87,137)【关键词】永磁同步电机;电动汽车;鲁棒性;变结构自抗扰控制【作者】高华鑫【作者单位】辽宁工程技术大学电气与控制工程学院辽宁葫芦岛125105【正文语种】中文【中图分类】TP180 引言随着全球经济的快速发展,燃料汽车的保有量日益增加。
汽车在提高人们生活质量的同时,也对生活环境造成了威胁。
因此,国际社会提高了对新能源汽车研发的重视,电动汽车已经成为新能源背景下的重要产物。
其驱动核心——永磁同步电机(PMSM)相比较于其他类型的交流电机具有结构简单,效率高,转动惯量较小,过载能力强等多方面的优点,现如今已被大量运用于新能源汽车等许多工程领域。
因此,对于交流永磁同步电机控制系统的研究具有重要的现实意义。
模型预测控制(MPC)的优势在于电流跟踪速度快、去耦合能力好等,已经在感应电机等多种电机中得到验证。
文献[11]将预测控制用于永磁同步电机的电流环控制中,提出了永磁同步电机的模型预测电流控制算法,实现了对电流的前馈和反馈控制,可消除d轴和q轴的非线性耦合,改善电流控制的动态性能,具有更好的去耦合效果和更快的动态性能。
文献[12]引入了电流预测算法,来减小预测模型参数误差对系统稳定性的影响,该算法有效地提高了伺服系统电流环的动态性能和稳态精度。
自抗扰控制(ADRC)是一种不依靠精确数学模型的非线性鲁棒控制方法,其具有较强的鲁棒性。
基于PMSM的二阶滑模无位置传感器控制
微电机MICROMOTORS第53卷第-期2020年 9月Vol.53. No.—Dec. 2022基于PMSM 的二阶滑模无位置传感器控制蔡军,李鹏泽,黄袁园(重庆邮电大学自动化学院,重庆440065)摘 要:在永磁同步电机传统滑模观测器(SMO )无位置传感器控制方案中,针对其因符号函数带来的抖振现象以及因一阶低通滤波器带来的相位滞后问题。
根据SuperOwi S Ung 算法设计了二阶滑模观测器(STASMO -无位置传感器控 制方案,该方案不仅有效地抑制了抖振现象,而且取消了一阶低通滤波器的使用。
当电机运行时,定子电阻会随着电机内部温度的升高而改变,故设计了合理的定子电阻观测器来实时观测定子电阻,从而避免了定子电阻对无位置 传感器控制方案估计精度的影响。
最后通过对所提方案进行系统模型搭建与仿真分析,从而证明了所提方案对电机 位置和转速具有较高的估计精度。
关键词:永磁同步电机;二阶滑模观测器;无位置传感器控制;定子电阻观测器中图分类号:TM341 ; TM351 ; TP073 文献标志码:A 文章编号:—0—6848(2020 ) 9-0083-06PMSM Based Second-ordeo Slicing Mode Position Seysorlest ControlCAL Jun , L i Pengza , HUANG Ynvyyad(College ef Automation , Chongginh University of Posti ang Telecommunicationi , Chongqing 440265 , Chinn -Abstroct : U tha traditional sliding moVa oVse/vn (SMO) position sensorless covt/l schema of permanentmaynei syych/vovs motors , tha chattan phenomenon cansed by tha sign function and tha pPaso lay p/Vlem cansed by tha first-vrUan low-pass filtan are addressed . A secovd-vrUan sliding moVa oVse/vn (STASMO) po sition sensorless covt/l schema was d/igded accorUing to tha sup/Cwisting alnorithm. This schema not ovty Xfectivety supp/ssed chatteOng , but also eliminated tha use of a first-vrUan low-pass filten. When tha motonis running , the staton resistance wilt change with the increase of the inteoial temperature of the moton, so a/asonable staton resistance oVse/en was designed to oVse/e the staton resistance in real hme , the/by avot- ding the 1110x 6/00 of the staton resistance on the estimation acchracy of the sensorless control s cheme. Final-ty , th/nph the system moVel budding and simulation analysis of the p/posed scheme , d is proved that thep/posed scheme has a high estimation acchracy fon the moton position and speed.Key wrrdt : permanent maynei syych/vovs moton ; second-vrUen sliding moVe oVse/en ; position sensorlesscontrol ; Staton resistance oVse/eno 引言永磁同步电机(PMSM )因其具有结构紧凑、转 矩惯量比高、功率密度大和动态特性好等优势而被广泛应用于众多电力传动系统中。
基于自适应滑模观测器无位置传感器PMSM控制方法研究
微电机MICROMOTORS第53卷第12期020年 9月VoO53. No. 10Dec. 2022基于自适应滑模观测器无位置传感器PMSM控制方法研究姚艳艳,张会娟,刘建娟,吴才章,陈红梅(河南工业大学电气工程学院,郑州450000)摘 要:针对无位置传感器永磁同步电机控制存在的转子位置与转速估计精度不高的问题,结合自适应算法设计了一种新型的自适应滑模观测器。
滑模自身机制引起的系统抖振问题是影响电机转子位置与转速估计的最大因素。
为了降抖减振,采用连续的smmoid 阈值函数代替ugn 符号函数;提出一个反电动势自适应估计环节代替传统的低通 滤波器,提高反电动势估计精度;此外为了降低转子位置及其转速的估计误差,采用锁相环对其进行估计。
最后,基于220W 的PMSM 搭建实验平台对上述改进算法进行验证。
结果表明:电机转子位置与转速估计稳态误差分别为0. 99 rad 、79 r/min ,能够实现无位置传感器PMSM 高精度控制。
关键词: 永磁同步电机;无位置传感器;自适应滑模观测器;锁相环中图分类号:TM351; TM341; TP073 文献标志码:A 文章编号:1001-6848(2020)9-0060-07Reserrci on PMSM WitOoui Position Sersoro Controi Baset on AdaptiveSlicing Mode ObservesYAO Yanyan , ZHANG Huijuan , LIU Jianjuan , WU Caizhang , CHEN Hongmai(College of Electrical Engineering , Henan University of Technoloya , Zhengzhof 457001, CCinn )Abstraci : Id this papan , a novel adaptive sliding moVa oVse/vn was proposed based on adaptive alnorithm toimprove tha estimation acch/cy of /ton position and speed of tha permanent maynei sypch/novs moton sys tem which has no position sensors. Tha system chatteOng cansed by tha sliding moVa mechanism is tha bia-n/t factos aPecting tha estimation acchracy of /ton position and speed of tha moton. Hence tha sian function was replaced by tha sinmoid amctiov t o reduce tha chatteOng. Moreoves , an adaptive astimatiov methoV of Bach-4MF (bach electromotive force) which substitutas tha trabidovai low-pass filtvs was put foovarf to in crease tha estimation acchracy of Bach-4MF. Then tha ppase-loched loop was adopted to reduce tha estima tion erros of /ton position and speed . FindPy, tha expeOment based on tha 200 W PMSM were implemen ted ,and the results show that the selycteVh /ros ol /ton position and speed were /sp/th/y reduced to2. 169 rad and 79 r/min, which can realize the hign-precisiov control of PMSM withovt position sensors.Key words : permanent maynei sypch/novs moton ; withovt position sen s on ; adaptive slidinn moVe oVse/en ;ppase-loched loopo 引言t d =2的矢量控制策略自问世以来便受到大量研究学者的青睐。
PMSM的无传感器磁场定向控制方案
框图 观测器理论 起动策略
系统框图
观测器理论
由前面的框图可以看出,无传感器FOC最为重要一 部分就是如何计算需要的换相角度,所以我们需要 根据测量的电流和计算电压估算出电机的位置 ( ) 和速度() 。下面介绍两种估算电机位置的方法。
观测器理论
方法一: 使用一个直流电机模型来估算PMSM的位置。需 要用到直流电机模型、电流观测器模型和反电势估 算模型。框图分别如下: ► 电机模型
启动策略
以一定的加速度使电机旋转,即在定子中加入幅值 级频模型
观测器理论
► 反电动势估算模型
观测器理论
方法二:使用Lugeberger观测器来估算电机位置
启动策略
由于电机零速启动时,无法得到确切的电机转子位 置,所以需要单独设计启动策略,总体的思想是启 动时使用一定的策略或者算法使电机达到一个恒定 的速度,然后切换到无传感器闭环状态。可以使用 下面的方法。
基于改进型ADRC_的PMSM_无位置传感器控制

第28卷㊀第4期2024年4月㊀电㊀机㊀与㊀控㊀制㊀学㊀报Electri c ㊀Machines ㊀and ㊀Control㊀Vol.28No.4Apr.2024㊀㊀㊀㊀㊀㊀基于改进型ADRC 的PMSM 无位置传感器控制肖芳,㊀谢元宇,㊀王明辉,㊀林海波(哈尔滨理工大学大型电机电气与传热技术国家地方联合工程中心,黑龙江哈尔滨150080)摘㊀要:针对永磁同步电机矢量控制中传统速度环PI 调节器存在协调性与抗干扰能力差的问题,引入自抗扰控制(ADRC )替代速度环PI 调节器,考虑到线性ADRC 中PD 控制存在性能较差的缺点,选择滑模控制代替PD 控制,提出改进型ADRC 控制方法;同时采用模型参考自适应系统(MRAS )取代传统机械式位置传感器对电机的转子位置进行检测,实现了永磁同步电机无位置传感器控制㊂通过采用改进型ADRC 与MRAS 相结合的控制方法,电机控制系统具有了更好的动态响应速度和抗干扰能力㊂最后通过永磁同步电机对拖实验平台对电机在转速恒定负载突变和带载启动转速突变两种工况下进行实验,验证了改进型ADRC 与MRAS 相结合的控制策略的有效性㊂关键词:永磁同步电机;无位置传感器;滑模控制;自抗扰控制;模型参考自适应DOI :10.15938/j.emc.2024.04.006中图分类号:TM343文献标志码:A文章编号:1007-449X(2024)04-0050-11㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀收稿日期:2023-08-28基金项目:黑龙江省高校基本科研业务费(2021-KYYWF -0746)作者简介:肖㊀芳(1982 ),女,博士,副教授,研究方向为电机系统的电磁兼容㊁电机驱动控制及其系统;谢元宇(1997 ),男,硕士研究生,研究方向为电机驱动控制;王明辉(1991 ),男,博士,讲师,研究方向为永磁同步电机无位置传感器技术㊁高性能交流电机控制技术;林海波(1997 ),男,硕士研究生,研究方向为电机驱动控制㊂通信作者:肖㊀芳Improved ADRC-based PMSM control without position sensorXIAO Fang,㊀XIE Yuanyu,㊀WANG Minghui,㊀LIN Haibo(National Engineering Research Center of Large Electric Machines and Heat Transfer Technology,HarbinUniversity of Science and Technology,Harbin 150080,China)Abstract :Aiming at the problem of poor coordination and anti-interference ability of the traditional speed loop PI regulator in vector control of permanent magnet synchronous motor,active disturbance rejection control (ADRC)was introduced to replace the speed loop PI regulator,and the sliding mode control wasselected to replace the PD control,considering the disadvantage of poor performance of PD control in the linear ADRC;at the same time,model reference adaptive system (MRAS)was adopted to replace the traditional mechanical position sensor to detect the rotor position of the motor,and the improved ADRC control method was proposed.Considering the poor performance of PD control in linear ADRC,the slid-ing mode control was chosen to replace the PD control,and the improved ADRC control method was pro-posed;meanwhile,the model reference adaptive system (MRAS)was adopted to replace the traditional mechanical position sensor to detect the rotor position of the motor,so as to realize the sensorless control of the permanent magnet synchronous motor.By using the improved ADRC combined with MRAS,the motor control system has better dynamic response speed and anti-interference ability.Finally,through the permanent magnet synchronous motor pair-drag experimental platform,the motor was experimented underthe two working conditions of constant speed and sudden load change and loaded startup speed change,which verifies effectiveness of the control strategy combining the improved ADRC and MRAS.Keywords:permanent magnet synchronous motor;sensorless;sliding mode control;active disturbance rejection control;model reference adaptive system0㊀引㊀言永磁同步电机(permanent magnet synchronous motor,PMSM)具有功率因数高㊁可靠性高㊁体积小等优点[1-2]㊂PMSM作为非线性㊁强耦合系统,其内外扰动都会影响电机的控制性能,因此要求控制策略应具有良好的抗干扰能力㊂目前电机控制系统常采用传统PI调速方式,传统PI控制具有结构简单㊁稳定性好等优点,但在动态响应速度与超调量之间存在矛盾,难以满足较宽速度范围的要求[3-5]㊂因此为了使系统具有更好的控制效果,各种非线性控制方法也被应用到电机控制中,自抗扰控制(active disturbance rejection control,ADRC)技术就是其中之一,其具有更强的鲁棒性,利用反馈控制技术对系统内外扰动进行实时估计和补偿,实现对电机输出的精确控制[6-8]㊂文献[9]对ADRC控制器中的非线性状态反馈控制律进行改进,提出一种基于滑模理论的改进非线性状态误差反馈控制律,但是ADRC控制器中的非线性函数参数较多,难以调节,对ADRC控制器的参数整定,主要依赖于经验㊂高志强教授通过对ADRC进行线性化处理,将ADRC中的非线性函数转换为线性函数[10],提出了线性ADRC(linear AD-RC,LADRC),其可以有效提高控制精度和抗干扰能力,解决传统ADRC参数整定困难的问题[11]㊂文献[12]将速度误差观测器的比例增益通道加入线性状态扩展观测器,以提高对扰动的观测速度,同时,在控制系统中加入在线识别算法,获取实时转动惯量信息,并对ADRC输出增益进行不断校正,从而提高其控制精度和抗干扰性能㊂文献[13]通过利用神经网络非线性函数的拟合能力识别PMSM 的干扰函数,用训练好的神经网络对状态扩张观测器的干扰量进行补偿,从而提高ADRC的观测精度和抗干扰能力㊂在PMSM矢量控制中,机械传感器可以为PMSM控制提供必要的转子位置,但机械传感器的使用不仅增加了生产成本,还受到电机运行条件和外部环境的影响,因此无位置传感器控制技术逐渐成为高性能PMSM控制的核心技术[14]㊂为此,本文首先分析了ADRC结构,根据PMSM的机械运动方程设计速度环一阶线性ADRC控制器,针对线性状态误差反馈控制律(linear state error feedback,LSEF)中PD控制抗干扰能力弱㊁控制性能差的问题,提出了改进型ADRC控制策略,最后,将改进型ADRC与模型参考自适应系统(model reference a-daptive system,MRAS)无位置传感器控制策略相结合㊂实验结果验证了所提控制方法的可行性与有效性㊂1㊀PMSM的数学模型为了研究方便,作出以下假设[15]:1)三相定子绕组空间对称,气隙空间中的磁动势以正弦方式分布;2)忽略磁饱和效应及各种损耗;3)忽略电机运行中温度和频率的影响㊂根据以上假设条件,PMSM在同步旋转坐标系下的电压方程为:u d=R s i d+dψdd t-ωeψq;u q=R s i q+dψqd t+ωeψd㊂üþýïïïï(1)定子磁链方程为:ψd=L d i d+ψf;ψq=L q i q㊂}(2)电磁转矩方程为T e=32p n i q[i d(L d-L q)+ψf]㊂(3)式中:u d㊁u q为定子电压在d㊁q轴的分量;i d㊁i q分别是定子电流在d㊁q轴的分量;ψd㊁ψq为定子磁链在d㊁q轴的分量;ωe为转子电角速度;L d㊁L q分别是d㊁q轴电感分量;ψf是永磁体磁链;p n为PMSM的极对数㊂本文选用表贴式PMSM电机,其L d=L q,则转矩方程可简化为T e=32p n i qψf㊂(4)机械运动方程为Jdωmd t=T e-T L-Bωm㊂(5)式中:ωm为电机的机械角速度;J为转动惯量;B为15第4期肖㊀芳等:基于改进型ADRC的PMSM无位置传感器控制阻尼系数;T L 为负载转矩㊂2㊀改进型ADRC 的数学模型2.1㊀自抗扰控制器分析与设计ADRC 由跟踪微分器(tracking differentiator,TD)㊁扩张状态观测器(extend state observer,ESO)和非线性状态误差反馈控制律(nonlinear state error feedback,NLSEF)三部分组成㊂根据上节电机机械运动方程与转矩方程可得电机转速输出状态方程为d ωm d t =3p n ψf i q 2J -T L J -BωmJ㊂(6)将i q 设为控制输出量u ,则控制输出量增益b =(3p n ψf )/(2J );由式(6)可知,PMSM 转速受到转动惯量J ㊁负载转矩T L 和摩擦系数B 的影响,将系统内外总扰动量用上述三者的变化量a (t )表示㊂因此PMSM 控制中转速环状态方程可改写为d ωmd t=bu +a (t )㊂(7)ADRC 控制器的设计由被控对象阶数决定,式(7)为一阶方程,因此使用一阶ADRC 控制器,下面给出一阶线性ADRC 控制器的离散算法㊂线性微分跟踪器(linear tracking differentiator,LTD)表达式为:e 1=v 1-v ∗;v ㊃1=-re 1㊂}(8)线性扩张观测器(linear extend state observer,LESO)表达式为:e 2=z 1-v ;z ㊃1=-β1e 2+z 2+bu ;z ㊃2=-β2e 2㊂üþýïïïï(9)线性反馈控制律(LSEF)表达式为:e 3=v 1-z 1;u 0=k p e 3+k d e 3;u =(u 0-z 2)/b ㊂üþýïïï(10)式中:v ∗为电机给定转速;v 1为给定转速v ∗经LTD平滑过渡后的输出转速;v 为电机的实际转速;z 1为LSEO 输出的状态变量v 的观测值;z 2为系统所受的内外扰动之和的估计值;β1㊁β2为构建LESO 结构中的各阶误差增益;k p ㊁k d 为线性状态误差反馈控制率增益㊂一阶线性ADRC 控制器结构如图1所示㊂图1㊀一阶线性ADRC 控制器Fig.1㊀First-order linear active disturbance rejectioncontroller2.2㊀滑模变结构分析与设计滑模变结构也称为滑模控制(sliding mode con-trol,SMC),其主要包括滑模切换面s (x )的选择与滑模趋近律u (x )的设计[16]㊂对于非线性系统,状态空间定义为:x ㊃=f (x ),x ɪR n ;状态空间中有一超平面:s (x )=s (x 1,x 2, ,x n )=0,其将状态空间分为s >0和s <0两部分,在切换面上的点被分为3种类型:通常点C ㊁起始点B 和终止点A [17],如图2所示㊂图2㊀滑模切换面上3种运动情况Fig.2㊀Three motion conditions on sliding mode switchingsurface当两侧点均趋近于切换面时,系统的运动轨迹就会沿着s (x )=0运动至理想状态,由此可得系统运动在滑模动态区满足的条件表达式为lim s ң0s ㊃s ɤ0㊂(11)确定滑模面函数为s =s (x ),s ɪR n ㊂(12)构建合适的滑动模态控制律:u =u +(x ),s (x )>0;u-(x ),s (x )<0㊂{(13)式中u +(x )ʂu -(x )㊂由上述可知,滑模运动的实现需要满足以下3个基本条件:1)滑动模态存在;2)满足可达性条件lim s ң0s ㊃s ɤ0;25电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第28卷㊀3)满足稳定性要求㊂2.3㊀改进型ADRC 控制器设计为了提高系统的控制性能,设计一种基于滑模控制的线性状态误差反馈控制系统(sliding mode control-linear state error feedback,SMC-LSEF)㊂由式(10)可知速度环ADRC 控制器中SMC-LSEF 的状态误差e 3为v 1与z 1之差,定义控制输出量为u 0=e ㊃3,则有:e 3=v 1-z 1;u 0=e ㊃3;u =(u 0-z 2)/b ㊂üþýïïïï(14)为方便分析,令x 1=e 3,对式(14)求导可得:x ㊃1=v ㊃1-z ㊃1;x ㊃2=x ㊃㊃1㊂}(15)根据上节滑模变结构理论,首先构建滑模面,考虑抑制高频噪声和消除稳态误差,引入积分量,因此定义积分滑模面为s =x 1+c ʏx 1d t ㊂(16)式中c 为滑模面参数,且c >0㊂为了减少运动点在滑模动态区内的运动时间,保证过渡过程顺畅[18],选择指数趋近律作为系统的滑动模态趋近律,其形式为s ㊃=-ξsign(s )-ks ㊂(17)式中:ξ>0㊁k >0且均可调;sign(㊃)为符号函数㊂根据Lyapunov 稳定性原理,判断滑模控制系统的稳定性㊂根据选取的滑模面,取李雅普诺夫函数为V =12s 2㊂(18)对式(18)进行求导,并结合式(17)可得V ㊃=ss ㊃=s (-ξsign(s )-ks )=-ξ|s |-ks 2㊂(19)由于ξ和k 均大于0,故ss ㊃<0恒成立,根据李雅普诺夫稳定判据得,系统状态运动点到达滑模动态区后,滑模运动趋于稳定㊂由此可得SMC-LSEF 在线性ADRC 中的表达式为:e 3=v 1-z 1;u 0=-ξsign(s )-ks -ce 3;u =(u 0-z 2)/b ㊂üþýïïï(20)通过以上分析可得到改进型滑模ADRC 控制的原理框图如图3所示㊂图3㊀改进型滑模ADRC 控制原理框图Fig.3㊀Block diagram of improved sliding mode ADRCcontrol principle3㊀MRAS 无位置传感器算法传统MRAS 转速辨识以电机参数不变为条件,但在运行电机温度升高时,电机定子电阻将增加;同时,电机磁饱和效应使电机电感值随电流变化,因此传统MRAS 性能较差㊂针对此问题,设计一种基于改进型MRAS 转速观测器,其可在线识别定子电阻和电感,提高速度识别精度㊂3.1㊀参考模型与可调模型的设计PMSM 模型可视为二维方程,当识别参数多于方程维数时,会出现欠秩问题,导致识别结果不收敛㊂针对该问题提出一种固定部分参数并对其他参数分步进行辨识的方法㊂表贴式PMSM 在同步旋转坐标系下的电流方程为:d i d d t =-R s L s i d +ωe i q +ud L s;d i q d t =-R s L s i q -ωe i d +u q L s -ωe ψf L s ㊂üþýïïïï(21)将式(21)改写为状态空间表达式为dd ti =Xi +Y u +Z w ㊂(22)式中:i =i d i q éëêêùûúú;X =-R sL s ωe ωe -R s L s éëêêêêùûúúúú;Y =1L s ;u =u d u q éëêêùûúú;Z =-ψf L s ;w =0ωe[]㊂由式(22)可以引入MRAS 中待估转速ωe 和定子电阻R s ,可得到可调模型状态空间表达式为d d ti ^=X ^1i ^+Y u +Z w ^㊂(23)式中:i ^=i ^d i ^q éëêêùûúú;X ^1=-R ^s L s ω^e ω^e -R^s L s éëêêêêêùûúúúúú;w ^=0ω^e éëêêùûúú;其35第4期肖㊀芳等:基于改进型ADRC 的PMSM 无位置传感器控制余参数同上式一致㊂当ωe ㊁R s 稳定后,将R s 作为固定值进行ωe ㊁L s 的辨识,此时可调模型的状态空间表达式为d d ti ^=X ^2i ^+Y ^u +Z ^w ^㊂(24)式中:X ^2=-R s L ^s ω^e ω^e -R s L ^s éëêêêêêùûúúúúú;Y ^=1L ^s ;Z ^=-ψf L ^s ;w ^=0ω^e éëêêùûúú㊂3.2㊀自适应律的确定定义状态误差e =i -i ^,将参考模型式(22)与可调模型式(23)作差可得d d te d e q éëêêùûúú=(Xi -X ^1i ^)+(Z w -Z w ^)=Xe +(X -X ^1)i ^+Z (w -w ^)㊂(25)式中:e d =i d -i ^d ;e q =i q -i ^q ;X -X ^1=-R s L s+R ^sL s ωe -ω^e ω^e -ωe -R s L s +R^s L s éëêêêêêùûúúúúú;w -w ^=0ωe -ω^e éëêêùûúú㊂根据的Popov 超稳定性理论,令W =-[(X -X ^1)i ^+Z (w -w ^)],则式(25)变为dd te =Xe -W ㊂(26)令V =e ,将式(26)代入Popov 积分不等式,可得η(0,t 1)=ʏt 10V TW d t =-ʏt 10e T -R s L s +R ^s L s ωe -ω^e ω^e -ωe -R s L s +R ^s L s éëêêêêêùûúúúúúi ^d i ^q éëêêùûúú-ψf L s 0ωe -ω^e éëêêùûúúìîíïïïïïüþýïïïïïd t ȡ-γ20㊂(27)为辨识ωe 和R s ,将式(27)拆分为两式:η1(0,t 1)=-ʏt 1e T(-R s L s +R ^s L s )i ^d i ^q éëêêùûúúd t ȡ-γ21;η2(0,t 1)=-ʏt 10e T (ωe -ω^e )i ^q -i ^d -ψf L s éëêêêùûúúúd t ȡ-γ22㊂üþýïïïïïïïï(28)因此,当上式中η1(0,t 1)ȡ-γ21,η2(0,t 1)ȡ-γ22成立时,系统即稳定㊂最后求解参数的自适应律为:ω^e =(K p +K i s )[i d i ^q -i q i ^d -ψf L s(i q -i ^q )];R ^s =-L s (K p +K i s)[(i d -i ^d )i ^d +(i q -i ^q )i ^q ]㊂üþýïïïï(29)当R s 值收敛到稳定值后,将电阻值视为固定值,对ωe 和L s 进行辨识㊂将参考模型式(22)与可调模型式(24)作差可得d d te d e q éëêêùûúú=(Xi -X ^2i ^)+(Y u -Y ^u )+(Z w -Z ^w ^)=Xe +(X -X ^2)i ^+(Y -Y ^)u +Z (w -w ^)+(Z -Z ^)w ^㊂(30)式中:Y -Y ^=1L s -1L ^s ;Z -Z ^=-ψf L s +-ψf L ^s;其余参数同上式一致㊂构造Popov 积分不等式,令W =-[(X -X ^2)i ^+(Y -Y ^)u +Z (w -w ^)+(Z -Z ^)w ^],得到速度和电感的自适应律,其中ωe 的表达式在各条件下与式(29)相同,电感的自适应律为1L ^s=-(K p +K i s )[(i d -i ^d )(R s i ^d -u d )+(i q -i ^q )(R s i ^q -u q +ω^e ψf )]㊂(31)根据上述分析,得到基于改进MRAS 的PMSM 转速辨识框图,如图4所示㊂图4㊀基于改进MRAS 的PMSM 转速辨识结构图Fig.4㊀Structure diagram of PMSM speed identificationbased on improved MRAS45电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第28卷㊀根据图4,分步辨识法的步骤可归纳如下:1)固定L s 值,通过式(29)辨识电机转速和定子电阻;2)电机R s 值在运行过程中不断变化;3)当R s 趋于稳定后,代入式(31)计算L s 的值,最终实现对R s ㊁L s 和ωe 的辨识㊂4㊀仿真分析以三相PMSM 为控制对象,在仿真平台上基于MRAS 的转速环PI 控制和转速环滑模ADRC 控制的仿真模型㊂基于滑模ADRC 的PMSM 无位置传感器控制系统总体控制框图如图5所示㊂图5㊀基于滑模ADRC 的PMSM 无位置传感器控制框图Fig.5㊀Sensorless control block diagram of PMSM based on sliding mode ADRC在速度环采用传统PI 调节器下将改进MRAS 与传统MRAS 在相同工况下进行仿真,通过对比图6与图7可知,改进MRAS 转速误差更小,动态性能更佳㊂由图8可知,电机在1000r /min 转速稳定运行时,改进MRAS 转子位置估计值和实际值的偏差更小㊂通过图4转速辨识结构图进行仿真模型搭建,验证MRAS 参数辨识策略,波形如图9所示㊂电阻初值为0.72Ω,电感初值为3.93mH㊂图9(a)电阻在35ms 处开始收敛至0.73Ω,误差约为1.4%;图9(b)电感辨识在0.1s 处开始收敛至3.86mH 左右,误差约为1.8%㊂因此,可以证明MRAS 参数辨识测策略的有效性㊂下面对所提出的PMSM 无位置传感器控制策略进行仿真,将电机转速设置为600r /min,在0.2s 时将负载增加到2N㊃m,由图10和图11可知:基于PI 控制下电机在启动阶段会产生超调,50ms 后达到给定转速;基于滑模ADRC 控制下转速波形大约30ms 达到给定转速,与PI 控制相比,滑模ADRC 控制的响应速度更快,超调量几乎为0,当负载突变时,滑模ADRC 控制的波动幅度更小,并且在短时间内趋于稳定㊂图6㊀传统MRAS 控制下动态转速波形Fig.6㊀Dynamic speed waveform under traditional MRAScontrol图7㊀改进MRAS 控制下动态转速波形Fig.7㊀Dynamic speed waveform under improved MRAS control55第4期肖㊀芳等:基于改进型ADRC 的PMSM 无位置传感器控制图8㊀传统MRAS 与改进MRAS 转子位置对比波形Fig.8㊀Comparison of rotor position waveforms be-tween traditional MRAS and improvedMRAS图9㊀电机参数辨识波形Fig.9㊀Motor parameter identification waveform图12为2种控制器下转子位置误差对比波形,图12可知,电机稳态运行期间,2种控制器下的转子位置估计值与实际值之间误差均较小,因此实际转子位置和估计转子位置在2个速度控制器下都可实现较好跟踪㊂图10㊀PI 控制的转速波形Fig.10㊀Speed waveform of PIcontrol图11㊀滑模ADRC 控制的转速波形Fig.11㊀Speed waveform of sliding mode ADRCcontrol图12㊀2种控制器转子位置角对比波形图Fig.12㊀Comparison waveform of rotor position angleof two controllers65电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第28卷㊀为了验证不同工况下控制策略的运行状态,将电机转速设定为600r /min,给定负载2N㊃m,电机带载启动,当系统稳定运行到0.2s 时,转速由600r /min 突变到1000r /min,仿真结果如图13所示㊂在带载启动负载突变的情况下,由图13(a)可知,PI 控制下波形转速突变时存在超调,转速误差为200r /min 左右,50ms 后稳定运行且转速误差为-43~43r /min;滑模ADRC 控制下波形在0.2s 时负载突变,超调量几乎为0,转速波动更平稳且转速误差在-30~20r /min 之间㊂图13㊀2种控制器转速对比波形图Fig.13㊀Speed comparison waveform of two controllers图14为2种控制器转子位置误差对比波形,由两组对比图可知,基于PI 控制的改进MRAS 实际转子位置与估计转子位置之间有轻微延迟,在转速变化时转子位置误差略有增大,而基于滑模ADRC 控制的转子角可以在转速波动前后实现良好的跟踪㊂由以上对比分析可知,基于滑模ADRC 的无位置传感器矢量控制在电机启动阶段可以快速且无超调的达到稳态,转速误差波动较小,当负载突变时,使用滑模ADRC 控制可有效地抑制电机转速波动,在带载启动转速突变的情况下,采用滑模ADRC 使转速变化更平稳,保证控制器控制性能的同时提高了抗干扰能力㊂图14㊀2种控制器转子位置误差对比波形图Fig.14㊀Waveform diagram of rotor position error comparison between two controllers5㊀实验验证PMSM 控制平台如图15所示,由以TI 公司DSP芯片TMS320F28075为核心的控制电路㊁逆变电路㊁隔离驱动电路㊁电流采样电路和PMSM 组成㊂5.1㊀滑模ADRC 控制器实验为了验证转速环ADRC 的控制性能,将在电机转速恒定负载突变和电机带载启动转速突变2种工况下进行实验验证㊂1)负载突变情况㊂将转速设定为600r /min,图16和图17分别是滑模ADRC 控制器下转速和转子位置响应曲线㊂在0.34s 突加负载,由图16可知,估计转速大约降低了57r /min,此时转速误差为28r /min,0.6s 左右恢复运行,转速波动时间约为0.1s㊂从图17可知,在滑模ADRC 控制下,估计转子位置波形和实际转子位置波形吻合程度较高㊂由上述对比分析可知,与基于PI 控制的改进MRAS 相比,在滑模ADRC 控制下估计转速仍能较好地跟踪实际转速,且当负载变化时,转速脉动更75第4期肖㊀芳等:基于改进型ADRC 的PMSM 无位置传感器控制小,转速误差波动时间更短㊂因此,在转速恒定负载突变的条件下,滑模ADRC 控制的改进MRAS 具有良好的抗干扰能力㊂图15㊀硬件实验平台Fig.15㊀Hardware experimentplatform图16㊀600r /min 时负载变化前后转速及误差波形Fig.16㊀Speed and error waveform before and afterload change at 600r /min2)转速突变情况㊂在电机达到给定转速300r /min 后,将转速升至500r /min㊂由图18可知,PI 控制下的电机在2.5s 时转速由300r /min 升为500r /min,转速超调约为25r /min;滑模ADRC 控制的电机在2.7s 时转速升高至500r /min,转速超调降低至9r /min㊂由图19可看出,变速过程中PI 控制器和滑模ADRC 都可以精确跟踪转子位置信号㊂图20为转子速度由600r /min 升至1000r /min转速对比波形㊂从图中可看出基于PI 控制的MRAS 在转速突变时转速存在明显超调,超调量达到5%,大约0.9s 后达到稳定状态,基于滑模AD-RC 控制的MRAS 超调较小,约为1.4%,大约0.6s 达到稳态㊂在2种转速环控制器下转速误差波动都很小㊂图17㊀600r /min 时转子位置及误差波形Fig.17㊀Rotor position and error waveform at 600r /min图18㊀转速突变时转速对比及误差波形Fig.18㊀Speed comparison and error waveform duringsudden changes in speed由上述对比分析可知,在转速突变的情况下,虽然PI 控制的MRAS 和滑模ADRC 控制的MRAS 都能理想的跟踪转子位置,但滑模ADRC 控制的MRAS 在保证转速上升无明显超调的同时,也保证了响应速度,且转速响应曲线更加平稳㊂85电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第28卷㊀图19㊀转速突变时转子位置对比及误差波形Fig.19㊀Comparison of rotor position and error wave-form during sudden speedchanges图20㊀转速突变时转速对比及误差波形Fig.20㊀Speed comparison and error waveform duringsudden changes in speed5.2㊀MRAS 观测器实验为了验证改进前后MRAS 观测器的速度估计性能,对传统MRAS 和改进后的MRAS 进行了实验和对比验证,图21给出了传统MRAS 与改进MRAS在负载变化前后转速对比及转速误差波形㊂图21㊀600r /min 时负载变化前后转速对比及误差波形Fig.21㊀Speed comparison and error waveform beforeand after load change at 600r /min从图21可以看出,在负载突变时,传统MRAS 转速误差波动约为-21~29r /min,而改进MRAS 转速误差降低至-14~21r /min,有效抑制了转速波动㊂电机稳定运行时,改进前后的估计速度都可以准确跟踪实际速度,但与传统MRAS 相比,改进的MRAS 具有更小的转速波动和更高的估计精度㊂6㊀结㊀论本文针对ADRC 参数设置复杂的问题,通过对ADRC 线性化并结合滑模变结构理论,设计一种用于电机速度环的滑模ADRC 控制器㊂滑模ADRC 用于取代速度外环的PI 控制,同时结合改进型MRAS 对PMSM 进行无传感器控制,仿真结果表明,滑模ADRC 控制器不仅能在电机启动初期快速无超调的达到给定转速,而且能有效减小电机启动阶段的速度波动,当电机负载发生变化或突然升速时,滑模ADRC 具有更强的抗干扰能力和更快的恢复速度㊂通过设定电机参数运行时发生变化,对改进MRAS 算法进行验证㊂实验结果验证了所提出的改进型ADRC 与MRAS 相结合的无传感器控制策略95第4期肖㊀芳等:基于改进型ADRC 的PMSM 无位置传感器控制的可行性与有效性㊂参考文献:[1]㊀甘醇,曲荣海,石昊晨,等.宽调速永磁同步电机全域高效运行控制策略综述[J].中国电机工程学报,2023,43(7):2496.GAN Chun,QU Ronghai,SHI Haochen,et al.Review of high-ef-ficiency control dtrategy for permanent magnet synchronous motors under wide speed range[J].Proceeding of the CSEE,2023,43(7):2496.[2]㊀王晓远,刘铭鑫,陈学永,等.电动汽车用PMSM带滤波补偿三阶滑模自抗扰控制[J].电机与控制学报,2021,25(11):25.WANG Xiaoyuan,LIU Mingxin,CHEN Xueyong,et al.Third-or-der sliding mode active disturbance rejection control of PMSM with filter compensationfor electric vehicle[J].Electric Machines and Control,2021,25(11):25.[3]㊀左月飞,张捷,刘闯,等.基于自抗扰控制的永磁同步电机位置伺服系统一体化设计[J].电工技术学报,2016,31(11):51.ZUO Yuefei,ZHANG Jie,LIU Chuang,et al.Integrated design for permanent magnet synchronous motor servo systems based on active disturbance rejection control[J].Transactions of China Electrotechnical Society,2016,31(11):51.[4]㊀王江,王静,费向阳.永磁同步电动机的非线性PI速度控制[J].中国电机工程学报,2005,25(7):125.WANG Jiang,WANG Jing,FEI Xiangyang.Nonlinear PI speed control of permanent magnetic synchronous motor[J].Proceed-ings of the CSEE,2005,25(7):125.[5]㊀梁骄雁,胡育文,鲁文其.永磁交流伺服系统的抗扰动自适应控制[J].电工技术学报,2011,26(10):174.LIANG Jiaoyan,HU Yuwen,LU Wenqi.Anti-disturbance adap-tive control of permanent magnet AC servo system[J].Transac-tions of China Electrotechnical Society,2011,26(10):174. [6]㊀卢达,赵光宙,曲轶龙,等.永磁同步电机无参数整定自抗扰控制器[J].电工技术学报,2013,28(3):27.LU Da,ZHAO Guangzhou,QU Yilong,et al.Permanent magnet synchronous motor control system based on no manual tuned active disturbance rejection control[J].Transactions of China Electro-technical Society,2013,28(3):27.[7]㊀李思毅,苏健勇,杨贵杰.基于自抗扰控制的永磁同步电机弱磁控制策略[J].电工技术学报,2022,37(23):6135.LI Siyi,SU Jianyong,YANG Guijie.Flux weakening control strat-egy of permanent magnet synchronous motor based on active dis-turbance rejection control[J].Transactions of China Electrotech-nical Society,2022,37(23):6135.[8]㊀闫光亚,艾武,陈冰,等.永磁直线同步电机ADRC控制系统[J].电工技术学报,2011,26(9):60.YAN Guangya,AI Wu,CHEN Bing,et al.ADRC control system of permanent magnet linear synchronous motor[J].Transactions of China Electrotechnical Society,2011,26(9):60.[9]㊀董家臣,高钦和.永磁直线同步电机电流环新型线性自抗扰控制[J].电机与控制学报,2019,46(1):1.DONG Jiachen,GAO Qinhe.New current loop LADRC design for permanent magnet linear synchronous motor[J].Electric Ma-chines and Control,2019,46(1):1.[10]㊀刘艳红,李朋真,李汇来,等.线性自抗扰控制系统的稳定性分析方法[J].控制工程,2024,31(1):95.LIU Yanhong,LI Pengzhen,LI Huilai,et al.Stability analysismethod of linear active disturbance rejection control system[J].Control Engineering of China,2024,31(1):95. [11]㊀李杰,齐晓慧,万慧,等.自抗扰控制:研究成果总结与展望[J].控制理论与应用,2017,34(3):281.LI Jie,QI Xiaohui,WAN Hui,et al.Active disturbance rejec-tion control:theoretical results summary and future researches[J].Control Theory and Applications,2017,34(3):281. [12]㊀贾红敏,张立广,闫曌.基于改进自抗扰的永磁同步电机位置伺服系统[J].电机与控制应用,2020,47(10):33.JIA Hongmin,ZHANG Liguang,YAN Zhao.Permanent magnetsynchronous position servo system based on improved active dis-turbance rejection control[J].Electric Machines&Control Ap-plication,2020,47(10):33.[13]㊀李寅生,陈永军.BP神经网络补偿ADRC在PMSM控制中的研究[J].微电机,2020,53(2):61.LI Yinsheng,CHEN Yongjun.Research on BP neural networkcompensation ADRC in PMSM control[J].Micromotors,2020,53(2):61.[14]㊀TANG Yirong,XU Wei,LIU Yi,et al.Dynamic performanceenhancement method based on improved model reference adaptivesystem for SPMSM sensorless drives[J].IEEE Access,2021,9:135012.[15]㊀安群涛.永磁交流伺服系统的位置控制及相关技术的研究[D].哈尔滨:哈尔滨工业大学,2006.[16]㊀梁传栋,许刘超,潘志恒,等.一种改进型滑模变结构控制永磁同步电机直接转矩控制[J].电机与控制应用,2022,49(3):1.LIANG Chuandong,XU Liuchao,PAN Zhiheng,et al.An im-proved sliding mode variable structure control direct torque con-trol for permanent magnet synchronous motor[J].Electric Ma-chines&Control Application,2022,49(3):1. [17]㊀李明炎.基于SMO的PMSM的控制方法的研究[D].杭州:杭州电子科技大学,2014.[18]㊀李益敏,陈愚,李云龙.基于滑模自抗扰的永磁同步电机控制系统设计[J].电气传动,2019,49(8):22.LI Yimin,CHEN Yu,LI Yunlong.Design of PMSM control sys-tem based sliding mode active disturbance rejection[J].ElectricDrive,2019,49(8):22.(编辑:刘琳琳)06电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第28卷㊀。
基于自抗扰控制器的PMSM矢量控制系统设计与实现
觶 1 = V2 V 觶 2 = fh V 觶 1 = Z2 - β1 ( Z1 - Y )+ b0U Z
(9)
(2) 扩 张 状 态 观 测 器 (10) 觶 2 =- β2 fal ( Z1 - Y , α1 , δ ) Z (3) 非 线 性 误 差 反 馈 U0 = β3 fal ( V1 - Z1 , α2 , δ ) (11) (4) 扰 动 补 偿 过 程 U = U0 - Z2 (12) b0 式 (9) ~ 式 (12) 中 V1 是 电 流 给 定 的 跟 踪 值 , Z1 是 电 流 观 测 的 跟 踪 值 。 使 用 ESO 实 时 观 测 出 系 统 “ 内 外 扰 动 ”
* 基 金 项 目 : 国 家 自 然 科 学 基 金 项 目 ( 50975193 ) ; 国 家 科 技 重 大 专 项 ( 2009ZX04014 - 101 - 05 ) ; 天 津 市 科 技 计 划 项 目 ( 08ZCKFGX02300 )
1 ADRC 数 学 模 型
自抗扰控制器是一种基于误差反馈的新型控制器, 主 要 由 非 线 性 跟 踪 微 分 器 (NTD) 、 扩 张 状 态 观 测 器 (ESO) 、
测控技术与仪器仪表
Measurement Control Technology and Instruments
基于自抗扰控制器的 PMSM 矢量控制 系统设计与实现 *
刘 清, 王太勇, 董靖川, 刘清建, 李 勃 ( 天 津 大 学 机 械 学 院 , 天 津 300072 )
摘 要: 针 对永磁 同步电 机存在 的非 线性、强 耦合、参 数 摄 动 等 问 题 ,设 计 并 实 现 了 基 于 自 抗 扰 控 制 器 (ADRC) 的 矢 量 控 制 系 统 。 首 先 提 出 基 于 ADRC 的 控 制 策 略 , 实 时 观 测 出 由 系 统 内 部 非 线 性 因 素 以 及 外 部 扰 动 引 起 的 “ 内 外 扰 动 ” 并 进 行 补 偿 , 从 而 实 现 精 确 控 制 ; 其 次 研 制 基 于 DSP 的 多 轴 运 动 控 制 卡 , 并 在 此 基 础 上 实 现 了 基 于 ADRC 的 PMSM 矢 量 控 制 系 统 。 仿 真 及 实 验 结 果 表 明 , 系 统 具 有 良 好 的动态 性能及 鲁棒性 ,能够快 速加 工出符 合要求 的模型 。 关键词 :永磁同 步电机 ;矢量控 制;自 抗扰控 制器;非 线性;
基于改进型滑模观测器的变频洗衣机用PMSM无位置传感器控制
基于改进型滑模观测器的变频洗衣机用PMSM无位置传感器控制张耀中【摘要】针对永磁同步电机(PMSM)位置传感器成本高、维护难等问题,设计了一套用于变频洗衣机的PMSM无位置传感器控制方案.采用改进型滑模观测器(SMO)实现电机转子位置与转速的估算,通过三电阻采样方式来检测三相电流,有效地降低了系统成本.系统采用矢量控制模式,针对洗衣机负载波动大、运行速度高的特点,在电流内环设计中增加了电压前馈补偿解耦控制环节,与传统PI调节器相比,该方案能够改善电流跟踪效果,提高控制性能.最后,在洗衣机样机平台上进行了实验验证,实验结果证明该控制方案运行可靠,控制效果良好,能够满足洗衣机的工作要求.【期刊名称】《轻工机械》【年(卷),期】2015(033)004【总页数】5页(P44-47,53)【关键词】变频洗衣机;永磁同步电机;无传感器控制;滑模观测器;解耦控制【作者】张耀中【作者单位】浙江大学电气工程学院,浙江杭州 310027【正文语种】中文【中图分类】TM925;TM341[自控·检测]目前,变频洗衣机正向着低成本、高性能、高效率趋势发展,而永磁同步电机(PMSM)由于其功率密度大、运行效率高、启动转矩大等优点,在高性能变频洗衣机系统及其他家电领域得到越来越广泛的应用[1]。
变频洗衣机要求电机能够高效稳定运行,一般采用矢量控制模式。
矢量控制需要获取电机转子位置以及转速,而位置传感器的安装会增加系统成本、降低可靠性,出于成本考虑,某些场合会采用无位置传感器控制方法。
无位置传感器器控制方法有高频注入法[2-3]、反电动势法[4]、滑模观测器法[5-6]、模型参考自适应法[7]、扩展卡尔曼滤波器法[8]等。
滑模观测器法计算量较小,鲁棒性强,比较适合用于低成本的洗衣机系统中。
因此,本文采用滑模观测器对转子位置及转速进行估算,用饱和函数代替传统的符号函数,并结合锁相环估算单元,有效地减小了抖振现象。
采用三电阻采样方法对三相电流进行检测,避免使用昂贵的电流霍尔传感器,降低了成本。
基于参数自适应新型滑模观测器的PMSM无位置传感器控制技术研究
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ቤተ መጻሕፍቲ ባይዱ
*#$ *
积% 减少生产成本并提高控制系统的可靠性" 目前 主要运用于 d(.(的位置辨识方法有两大类(') ' 基 于定子基波反电动势的方法和基于电机凸极性的方 法& 第一类方法主要适用于电机中% 高转速运行时 的位置辨识" 包括滑模观测器法(&) % 模型参考自 适应法等([) # 基于凸极效应的方法在零% 低速阶 段有较好的辨识 效 果" 包 括 高 频 注 入 法(#%) % 电 感 检测法(##) 等& 文献(#$) 中将两类方法进行有效结 合" 设计出全速度范围内电机位置辨识算法" 保证 了电机可靠运 行& 文 献 ( #7 ) 中 利 用 8D+*中 的 扩 张观测器! j.,$ 实现对转子位置的辨识" 但观测器 交流扰动存在相位滞后" 需要进行扰动转换以补偿 相位&
?@引@言
永磁同步电机! d(.($ 具有体积小% 高功率密 度% 高可靠性等突出优点" 被广泛应用于工业生 产% 精密 仪 器% 机 车 传 动 等 诸 多 领 域(#) " 精 确% 稳定% 可靠的控制对系统性能至关重要& 传统的线 性 d)D调节有着不可避免的缺点($) " 如动态品质受 调节参数变化及扰动影响非常明显" , 调节速度和,超调量-之间有着不可协调的矛盾等& 为解决 这些问题" 一些采用复杂控制算法的非线性控制器
无位置传感器控制方法的运用能够减小电机体
收稿日期 $%#' ## #; 基金项目 国家自然科学基金"#"%'#[% 作者简介 廖自力#['; 男 博士 副教授 研究方向为车辆电传动技术
赵其进#[[; 男 硕士研究生 研究方向为永磁同步电机控制技术
!' 期
廖自力等' 基于自抗扰技术的 d(.(无位置传感器优化控制
!第 "# 卷!第 ' 期 $%#& 年 ' 月
()*+,(,-,+.
/012"#3402' 5612$%#&
基于自抗扰技术的 d(.(无位置传感器优化控制
廖自力 赵其进 刘春光
! 陆军装甲兵学院 控制工程系" 北京 #%%%'$$
摘!要 在使用优化的自抗扰控制! 8D+*$ 代替传统比例积分! d)$ 控制的基础上" 分别建立基于模型参考自适应法 和脉振高频注入法的位置辨识系统" 以满足永磁同步电机! d(.($ 不同速度范围内的辨识精度需求& 所设计的自抗 扰控制器中" 保留非线性微分跟踪器! -D$ 的同时以线性误差控制律代替非线性状态反馈控制律! 4i.jk$ " 使模型 得以简化& 仿真结果表明' 简化后的 8D+*能在两种无位置传感器控制方法中取得较好的控制效果" 和 d)控制相 比" 系统抗扰动性更强" 电机位置和速度辨识效果也更优& 关键词 自抗扰控制# 无位置传感器# 优化算法# (+8.# 脉振高频注入 中图分类号 -(7"# -d$'7!!!!文献标志码 8!!!!文章编号 #%%#9:&;&$%#&%'9%%;;9%;
逐渐被应用" 如模糊 d)D控制(7) % 神经网络等智能 控制(;) % 自抗扰控制等(") &
自抗扰控制不依赖于被控对象数学模型" 能够 对系统扰动进行估计和补偿" 提高控制系统的适应 性和鲁棒性& 然而" 常规的自抗扰控制器中需要设 置的参数很多" 不便于实际整定" 一些学者提出了 简化的一阶系统模型来减少待整定参数" 还有一些 学者采用模糊规则等智能算法(:) 对参数进行自整 定" 这实际也在另一方面增加了系统复杂程度&
6'*9.0"'99IF/+3("-.*/0."1.02464 P(9'>.*5:/+7'J+9/#08(*:' O'H':/+.*-.*/0."
i)8,G=1=" G<8,F=m=A" i)H*?6AB6LAB ! P)4$27;)%7,KS2;=$%* 5,%72,-@%.'%))2'%." S($*);/,KS2;/S2;,2)* Y,2()" V)'F'%. #%%%'$" 5#'%$$